北斗卫星导航系统伪距差分定位技术的分析
北斗与GPS联合伪距差分定位解算
中国科 技信息 2 0 1 5年第 0 7期
信息技术推广
翁 呈华
断业 峰
蒋海 林
61 1 7 5部队
翁 呈华
p 1 0 + o 、 一o
一
咄一 +吠 一 o +《 +o —o
p 一 o 七o +o 一o
D 一 一
o 一 一9 、 p — o 1 +o + o 一o Y
”
一 一
数学模型
对 于 短 基 线 测 量 时 ,由 于 测 站 1 日 J 距 离较 短 , 测 误差
止
其中,
^
X = ( g X m , , , c ) ( 3)
^ 壕 也 9 c . l l — —p p 一9 ℃ 一o 、 +p . o t +o t +o 一o 、
站 的坐标 参数 。 北斗与 GP S联合伪距单点定位虽然比单系统单点定 位 的精度 有 了一定 的提 高 ,但是仍 然不 能满 足 高精 度的 需 求 ,因此 就需 要用 到差 分相 对定位 的方 法 。它不 但 可以 消 除 或 削弱 GP S系统 的 S A 影 响 ,还可 以消 除或 削弱 卫 星 钟差 、接 收机 钟差 以及 大气延 迟等 影响 。
本文介绍了型 ,使用 MT L AB编制定位程序 , 对实测数据分别进行北斗 、
GP S单系统伪距双差基线 解算 ,北斗 / GP S双系统伪距双差 基线解算 。实现 了分米级的北斗 、GP S以及北斗 / GP S短基续
伪距差分定位。通过对 结果分析和 比较 ,验证了组合 定位 的优越性 ,也进一步验证 了本文方法 的可行性与结论 的正确性 ,并
伪距差分原理

伪距差分原理
伪距差分原理是一种通过测量卫星信号的伪距差来确定接收机位置的方法。
在使用全球定位系统(GPS)等卫星导航系统进行定位时,接收机需要同时接收多颗卫星的信号。
每颗卫星都会发送一个精确的时间信号,接收机通过测量自身接收到的卫星信号与卫星发送的信号之间的时间差(即伪距差)来计算自身与卫星的距离。
伪距差分原理的基本原理是:先将一个已知位置的基准站接收到的卫星信号质量较好的伪距数据与接收到的同一颗卫星信号的伪距数据进行比较,得到差分改正值。
然后将这个差分改正值应用到未知位置的移动接收机的伪距数据上,得到修正后的伪距数据。
通过修正后的伪距数据,再利用三角定位等方法,就可以精确计算出移动接收机的位置。
伪距差分原理的优点是能够有效消除大气延迟、钟差等误差,提高定位的精度。
但它的缺点是需要一个基准站的支持,并且基准站与移动接收机之间的距离不能太远,以保证差分改正值的准确性。
伪距测量及定位原理
伪距测量及定位原理伪距测量及定位原理是一种基于卫星信号的测距技术,可以用来确定接收器的位置。
这种技术是现代导航系统中最常用的定位技术之一。
伪距测量是通过测量卫星信号从发射到接收器的时间来计算距离,再结合卫星的位置信息,最终确定接收器的位置。
伪距测量的原理是基于卫星导航系统发射的信号在空间中传播的速度是已知的。
当卫星信号到达接收器时,可以通过测量信号从发射到接收器的时间来计算距离。
由于卫星的位置信息是已知的,通过多个卫星的信号测距,可以得到接收器相对于这些卫星的距离。
进一步,通过三个或以上的卫星信号测距,可以利用三边定位原理来确定接收器的位置。
伪距测量及定位原理的关键在于准确测量信号的传播时间。
接收器会接收到多个卫星的信号,每个信号都会有一个不同的传播时间。
为了准确测量传播时间,接收器需要和卫星进行时间同步。
卫星会通过导航信号发送时间信息,接收器通过接收这些信息来进行时间同步。
一旦接收器和卫星的时间同步完成,接收器就可以通过测量信号的传播时间来计算距离。
伪距测量及定位原理的精度受到多种因素的影响。
首先,信号的传播速度在大气中会发生变化,这会导致距离的测量误差。
其次,卫星的位置信息也会存在一定的误差。
此外,接收器本身的误差也会对定位精度产生影响。
为了提高定位的精度,可以使用差分定位技术,通过与参考站的信号进行比较,消除误差。
伪距测量及定位原理在现代导航系统中得到了广泛应用。
全球定位系统(GPS)就是一种基于伪距测量及定位原理的导航系统。
通过接收多颗卫星的信号,GPS可以实现准确的定位和导航。
除了导航系统,伪距测量及定位原理还可以应用于地震监测、航空航天等领域。
总结一下,伪距测量及定位原理是一种基于卫星信号的测距技术,通过测量信号的传播时间来计算距离,再结合卫星的位置信息,最终确定接收器的位置。
这种技术在现代导航系统中得到了广泛应用,提供了准确的定位和导航功能。
尽管伪距测量及定位原理存在一定的误差,但通过差分定位等技术,可以提高定位的精度。
差分定位技术对比分析
差分GPS定位技术分析单GPS系统提供的定位精度是优于25米,而为得到更高的定位精度,通常采用差分GPS技术:将一台GPS接收机安置在基准站上进行观测。
根据基准站已知精密坐标,计算出基准站到卫星的距离改正数,并由基准站实时将这一数据发送出去。
用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度差分GPS定位的几种常用的方法包括伪距差分、位置差分和载波差分三类。
伪距差分将所有卫星的测距误差传输给用户,用户利用此测距误差来改正测量的伪距,此方法效果良好,但目前能够支持用户修正伪距的GPS接收设备的价格相对较为昂贵,并且算法的主要计算任务在用户一方,不适合运用到计算资源相对比较缺乏的嵌入式系统当中。
此前也有相关研究提出采用集中差分的方式,即将主要的计算任务交给基站,而用户端只负责发送自己得到的伪距信息,并接收基站的计算结果;但这样做也可能导致信息发送和接收占用有限的无线信道,从而在用户数量较多的时候导致信息发送和接收的延迟,影响定位的实时性。
载波相位差分定位精度很高,但算法较复杂,且由于求解整周未知数需要一定时间的静止观测,所以此算法适合固定站进行静态精确定位,而不适合于应用到汽车导航定位中。
位置差分与前两种差分算法相比,计算复杂度最小,且能够应用于位置差分的GPS接收设备的造价低廉,任何一种GPS接收机均可改装成位置差分系统。
虽然位置差分的效果一般不如伪距差分,但只要基站位置和用户所在的位置在一定的区域范围内(一般认为是百公里左右),所得到的差分效果是可以满足实际车辆定位的需求的,所以作为一般的城市车辆应用来讲,并不需要建设非常多的基站就可以满足绝大多数新旧GPS用户的定位要求。
另外,位置差分计算量较小,也非常适合应用于处理能力并不太强的嵌入式系统。
考虑到以上种种因素,特别是GPS接收机的限制,车载定位通常采用位置差分的GPS算法,GPS接收机的导航电文以1Hz的刷新频率通过串行通讯口不断传送到车载导航平台。
基于北斗导航定位系统的伪卫星技术研究

基于北斗导航定位系统的伪卫星技术研究一、本文概述随着科技的飞速发展,全球定位系统(Global Positioning System,GPS)在军事、民用等多个领域发挥了巨大作用。
依赖单一系统的风险逐渐显现,特别是在复杂环境和关键领域,如航空、航海等,多系统融合定位技术成为了研究的热点。
北斗导航定位系统(Beidou Navigation Satellite System,BDS)作为我国自主研发的全球卫星导航系统,其独特的优势和广泛的应用前景,使得基于北斗导航定位系统的伪卫星技术研究显得尤为重要。
伪卫星技术,也称为地面增强系统(Ground Augmented System,GAS),通过在地面设置类似于卫星的信号发射装置,可以增强或补充卫星导航信号,提高定位精度和可用性。
本文旨在深入研究基于北斗导航定位系统的伪卫星技术,分析其工作原理、系统架构、关键技术以及应用场景,为我国在全球导航卫星系统领域的技术创新和应用发展提供参考。
本文将首先介绍北斗导航定位系统的基本原理和发展现状,为后续伪卫星技术的研究奠定基础。
随后,详细阐述伪卫星技术的基本概念和关键技术,包括信号生成、传输、接收和处理等方面。
在此基础上,探讨伪卫星技术在不同应用场景下的优势和挑战,以及未来的发展趋势。
对全文进行总结,并指出需要进一步研究的问题和方向。
通过本文的研究,我们期望能够为北斗导航定位系统的伪卫星技术提供更加全面、深入的理论支持和实际应用指导,推动我国在全球导航卫星系统领域的技术进步和应用创新。
二、北斗导航定位系统分析北斗导航定位系统(BDS)是中国自主研发的全球卫星导航系统,旨在为全球用户提供全天候、全天时、高精度的定位、导航和授时服务。
该系统由空间段、地面段和用户段三部分组成,其中空间段包括地球静止轨道卫星、倾斜地球同步轨道卫星和中地球轨道卫星等多种类型的卫星,共同构成覆盖全球的卫星网络。
在技术特点上,北斗导航定位系统采用了三频信号、星间链路、区域短报文通信等独特设计,提高了系统的可用性和精度。
北斗导航系统的定位精度提升与信号强化技术
北斗导航系统的定位精度提升与信号强化技术近年来,随着全球导航卫星系统的发展和应用的普及,北斗导航系统在我国的定位服务中扮演着不可或缺的重要角色。
不断提升北斗导航系统的定位精度以及增强信号的技术手段是当前研究的热点。
本文将重点探讨北斗导航系统的定位精度提升与信号强化技术。
一、定位精度提升技术北斗导航系统的定位精度是影响其实际应用价值的关键因素之一。
为了提升北斗导航系统的定位精度,以下几种技术手段被广泛研究和应用。
1.1 北斗差分定位技术差分定位技术是一种通过对接收机接收到的观测数据进行处理,将差分电离层延迟、差分多径效应等误差减小的技术方法。
差分定位技术结合了测量站点与参考站点的观测数据,通过差分处理消除大部分系统误差,从而提高定位的精度。
1.2 多频率测量技术传统的单频率测量技术在面临多径效应、电离层延迟等误差时容易出现定位精度下降的情况。
而多频率测量技术通过接收多个频率的信号,可以消除多径效应和电离层延迟对定位精度的影响,从而提高定位的精度。
这是因为多频率测量技术可以利用多个频率之间的差异来消除误差。
1.3 强化载波相位技术载波相位是北斗导航信号中包含的重要信息之一,通过对载波相位的精确测量,可以提高定位的精度。
强化载波相位技术通过对载波相位的精确度进行增强来提高定位的精度。
例如,采用较长的载波积累时间、提高载噪比以及使用高精度的GPS同步技术等手段可以有效提升载波相位的精确度。
1.4 多站组网技术多站组网技术是指通过在不同地理位置安装多个接收站点,利用这些接收站点之间的信号交叉检验,从而消除误差,提高定位精度的技术。
多站组网技术可以利用不同站点之间的差分处理结果来提高定位的精度,尤其在遭受多径效应等复杂环境影响时,其优势更为明显。
二、信号强化技术在北斗导航系统中,信号强度的稳定性和可靠性是保证定位服务质量的重要因素。
为了增强北斗导航信号的强度,以下几种技术手段被研究和应用。
2.1 空中信号增强技术空中信号增强技术是一种通过在卫星上增加天线阵列来提高信号传输强度的技术。
GPS伪距定位原理解析
GPS伪距定位原理解析GPS(Global Positioning System)全球卫星定位系统是一种基于卫星导航的定位和导航技术。
其核心是通过接收来自卫星的信号并计算信号的传播时间来确定接收器的位置。
而GPS伪距定位原理是GPS定位中最常用的一种方法。
一、信号传播时间计算GPS伪距定位原理的第一步是计算卫星信号传播的时间,也称为“伪距”。
接收器接收到来自至少4颗卫星的信号,并通过测量信号传播的时间来确定其与每颗卫星的距离。
伪距计算的基本原理是根据信号发送和接收之间的时间差来计算距离。
具体的计算方法是通过接收机和卫星的时钟进行时间同步,接收机记录下信号接收的时刻(T_r)以及卫星信号发送的时刻(T_s),然后计算两者之间的时间差Δt=T_r-T_s。
然而,接收机的时钟和卫星的时钟并不精确,存在一个时间偏差Δt_s,因此需要考虑纠正。
二、伪距的计算接下来,通过伪距的计算,可以找出接收机与卫星之间的距离。
由于速度为c的电磁波在传播过程中传播速度几乎不变,因此可以通过伪距的计算得到距离。
伪距(Pseudo-range)的定义是卫星到接收机之间的几何距离加上其他误差(如大气误差、多径效应等)。
伪距计算公式为:Pseudo-range = Speed of light * (T_r - T_s) + c*Δt_s三、卫星位置确定接下来的任务是确定卫星的位置。
GPS接收器通过多个卫星的信号来确定自身的位置。
但是,仅通过一个卫星的信号无法准确测量位置,至少需要4颗卫星的信号才能计算出准确的位置。
卫星的位置是由GPS导航系统的控制段计算得出的,导航系统中的主要组成部分是GPS的地面控制段。
此部分由一组地面站和控制中心组成,这些地面站通过GPS信号来监控卫星的位置和状态,并计算出它们的轨道参数。
通过接收到的卫星的信号,接收器可以从每颗卫星中获取关于卫星的信息,包括卫星的识别号、传播时间以及卫星的位置。
四、位置计算一旦卫星的位置确定,并且伪距计算完成,接收机就可以开始计算自身的位置了。
伪距定位算法
伪距定位算法伪距定位算法是一种常用的定位算法,通过测量卫星与接收器之间的信号传播时间差来确定接收器的位置。
本文将介绍伪距定位算法的原理、应用和优缺点。
一、原理伪距定位算法基于卫星导航系统,如全球定位系统(GPS),利用卫星发射的信号和接收器接收到的信号之间的时间差来计算距离。
具体步骤如下:1. 接收器接收到至少四颗卫星发射的信号,并记录下信号接收时间。
2. 接收器通过卫星发射信号的速度(光速)和接收时间计算出信号传播的时间。
3. 根据信号传播的时间和速度,计算出卫星与接收器之间的距离。
4. 通过至少三颗卫星的距离计算出接收器的粗略位置。
5. 通过更多卫星的距离测量,使用三角定位法来提高定位的精确度。
二、应用伪距定位算法广泛应用于定位和导航系统中,如汽车导航、航空导航、军事定位等。
以下是几个常见的应用场景:1. 汽车导航:伪距定位算法可以通过接收卫星信号,确定汽车的位置,并提供导航指引,帮助驾驶员准确找到目的地。
2. 航空导航:伪距定位算法在航空导航中起到关键作用。
飞机上的导航系统可以通过接收到的卫星信号,实时确定飞机的位置和航向,为飞行员提供准确的导航信息。
3. 军事定位:伪距定位算法在军事领域具有重要意义。
军事装备可以通过接收到的卫星信号,确定士兵或装备的位置,实现精确的定位和导航。
三、优缺点伪距定位算法有以下优点:1. 精度高:伪距定位算法可以通过接收多颗卫星的信号,使用三角定位法来提高定位的精确度。
在开放区域和有良好信号接收条件的情况下,定位精度可以达到几米甚至更高。
2. 全球覆盖:伪距定位算法依托于卫星导航系统,如GPS,可以在全球范围内提供定位服务。
只要能接收到足够数量的卫星信号,就可以进行定位。
3. 实时性强:伪距定位算法能够实时计算接收器的位置,及时提供定位信息。
在导航和军事等领域,实时性对于决策和行动至关重要。
然而,伪距定位算法也存在一些缺点:1. 受环境影响:伪距定位算法对信号的接收环境要求较高,如高层建筑、山地、森林等会对信号传播产生阻碍,影响定位精度。
基于北斗卫星导航系统的差分定位技术性能分析

基于北斗卫星导航系统的差分定位技术性能分析庄皓玥;原彬;张睿【摘要】针对目前高精度定位的应用需求,本文分析了卫星导航系统的差分定位技术,重点研究了差分技术原理,并在此基础上建立了伪距差分和载波相位差分的模型,搭建了动态跑车试验平台,在动态环境下对不同定位模式的定位精度进行了分析.试验结果表明,伪距差分定位精度优于2m(2σ),载波相位差分定位精度优于0.04m(2σ),载波相位差分技术可满足高精度定位的需求,具有很大的工程应用价值.【期刊名称】《现代导航》【年(卷),期】2018(009)003【总页数】5页(P172-176)【关键词】北斗;单点定位;伪距差分;载波相位差分【作者】庄皓玥;原彬;张睿【作者单位】中国电子科技集团公司第二十研究所,西安 710068;中国电子科技集团公司第二十研究所,西安 710068;中国电子科技集团公司第二十研究所,西安710068【正文语种】中文【中图分类】P2280 引言目前,世界上最为成熟的卫星导航系统为美国的GPS,我国的北斗、欧洲的伽利略等卫星导航系统都在快速的建设发展中。
无论是GPS、北斗还是伽利略系统,它们的定位原理相同,都是利用用户测量到多颗卫星的距离进行定位。
传统的单点定位精度在米级甚至十米级以上,为提高卫星导航系统的定位精度,满足用户对高精度定位的需求,差分技术应运而生。
依据修正信息种类的不同,差分技术可分为位置差分、伪距差分及载波相位差分三种。
就定位精度而言,前两种差分方式的定位精度为米级或分米级,而载波相位差分的定位精度可达到厘米甚至毫米级。
本文介绍了伪距差分及载波相位差分定位技术的基本原理,建立了其模型,搭建基于北斗导航系统的动态跑车试验平台,通过开展大量的动态跑车试验,对不同定位算法的精度进行了分析比较,试验结果表明,载波相位差分技术可大幅提高北斗卫星系统的定位精度。
1 卫星导航差分技术原理1.1 北斗定位的主要误差源用户接收到的北斗导航信号包含多种误差,可分为空间部分误差、传播路径误差及用户部分误差三部分。
伪距差分法

伪距差分法伪距差分法概述伪距差分法是一种高精度的卫星定位技术,利用多颗卫星的信号进行测量,通过计算卫星与接收机之间的距离差异来确定接收机的位置。
该技术广泛应用于导航、航空、船舶、地质勘探等领域。
原理伪距差分法利用卫星发射的信号在空气中传播的时间和速度来测量接收机与卫星之间的距离。
由于信号在传播过程中会受到大气延迟、多径效应、钟差等因素的影响,因此需要对这些误差进行校正。
伪距差分法通过将两个接收机之间的距离作为基线,测量它们到同一颗卫星发射信号时的时间差,从而消除大气延迟和钟差误差。
这种方法可以提高定位精度,并且可以实现实时动态定位。
步骤1. 接收卫星信号接收机接收来自多颗卫星发射的信号,并记录每个信号到达时间。
2. 计算伪距根据接收到的信号时间和卫星的发射时间,计算出信号在空气中传播的时间和距离,得到伪距数据。
3. 校正误差对伪距数据进行误差校正,包括大气延迟、钟差、多径效应等。
4. 计算位置利用多颗卫星提供的伪距数据和已知位置的卫星位置信息,计算接收机的位置。
优点1. 高精度:伪距差分法可以实现亚米级别的定位精度,适用于高精度定位需求的场合。
2. 实时性:伪距差分法可以实现实时动态定位,适用于需要快速响应和及时更新位置信息的场合。
3. 可靠性:伪距差分法可以同时接收多颗卫星信号,并且可以通过校正误差来提高定位精度和可靠性。
缺点1. 受环境影响:大气延迟、多径效应等因素会影响信号传播速度和时间,从而影响定位精度。
2. 依赖基站:伪距差分法需要至少两个接收机作为基站来进行测量,如果基站不稳定或者无法提供准确的参考数据,则会影响定位精度。
应用1. 导航:伪距差分法被广泛应用于GPS导航系统中,可以提供高精度的导航信息。
2. 航空:伪距差分法可以用于飞机自动驾驶系统和着陆导航系统,提高飞行安全性。
3. 船舶:伪距差分法可以用于海上定位和导航,提高船舶安全性。
4. 地质勘探:伪距差分法可以用于地震勘探、矿产勘探等领域,提高勘探效率和精度。
差分北斗定位原理

差分北斗定位原理主要是通过求差消除公共误差源,如大气层延迟、多路径效应等对定位的影响,以得到高精度的位置信息。
其基本工作原理是通过已知位置的基准站和移动站观测相同卫星的同步观测信息,得出同一卫星的同步卫星观测值之差,并送入解算器,得到差分电压,再通过传输系统,将差分电压送给移动站,用于改正移动站用户的观测量。
具体来说,差分定位技术的基本原理是在基准站上对所有可见卫星进行观测,并求得各卫星的伪距观测值和各卫星的卫星钟差。
然后根据基准站和移动站的同一时间、同一卫星的伪距观测值求得各卫星的整周模糊度。
基准站和移动站同时观测相同的卫星,由于两站距离很短,其内部系统误差影响也大体相同,求得的整周模糊度差异就主要代表了外周误差,也就是这两站对该位置而言的外部公共误差信息。
然后在移动站利用基准站发送的这些误差信息来修正自己的观测数据。
当把修正后的伪距观测值带入一个可支持伪距观测值解算的算法模型中即可求得厘米级甚至毫米级的精度位置信息。
以上就是差分北斗定位的基本原理,可以看出,差分定位能够显著提高定位精度,尤其适用于解决高精度位置服务的问题。
北斗rtk差分原理
北斗rtk差分原理
北斗RTK(实时动态定位技术)差分原理是通过使用参考站和移动站之间的相对距离差分,进而提供更准确的定位结果。
下面是北斗RTK差分原理的基本步骤:
1. 基准站设置:在参考区域内选择一个稳定位置建立基准站。
基准站通过接收卫星信号,并测量卫星的伪距和载波相位等数据。
2. 移动站测量:移动站也接收相同的卫星信号,测量卫星的伪距和载波相位等数据。
3. 数据传输:基准站将测量的数据以无线方式传输给移动站,包括卫星的伪距和载波相位等数据。
4. 相对距离计算:移动站使用接收到的基准站数据以及自己测量的数据,计算出移动站和基准站之间的相对距离。
5. 定位计算:通过将移动站和基准站之间的相对距离转换为坐标值,确定移动站的位置。
这一计算过程通常使用精确的数学模型进行。
6. 定位结果:最后,移动站可以利用基准站提供的参考信息,实现高精度的实时定位。
总体来说,北斗RTK差分原理通过基准站和移动站之间的相对距离差分计算,消除了大部分卫星信号误差,提供了更高精
度的实时定位结果。
这种差分技术在测绘、农业、建筑、航测等领域有广泛的应用。
北斗卫星导航系统的伪距仿真方法与相关技术
本技术涉及一种北斗卫星导航系统的伪距仿真方法,属于卫星导航定位技术领域。
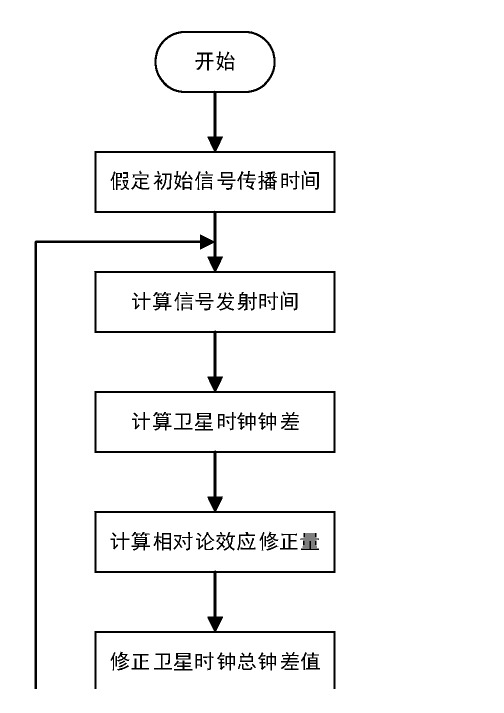
该方法通过给定初始伪距计算出信号发射时间;通过修正卫星时钟总钟差值,得到修正后的信号发射时间;判断对于接收机该卫星是否可见,如果可见,则计算卫星与接收机之间的几何距离和大气折射造成的传播延迟,更新伪距直至得到满足精度要求的伪距,然后导航卫星信号模拟器生成相应的卫星信号发射出来,接收机接收卫星信号,处理后进行定位解算,即能够定位到仿真预先输入设置的位置和仿真时间,则能够在实验室内得到和外场相同的北斗卫星定位场景,用于测试接收机性能,到达仿真测试接收机性能的目的。
权利要求书1.一种北斗卫星导航系统的伪距仿真方法,其特征在于:包括如下步骤:步骤1、给定初始伪距,并通过所述伪距计算出信号发射时间;伪距ρ的表达式为:ρ=c(tr-ts) (1)式中,tr为信号接收时间,ts为信号发射时间,c为光速;信号传播时间τ表示为:则:ts=tr-τ (3)步骤2、计算卫星时钟误差;由于时间偏差、频率漂移的存在以及卫星误差会随着时间累积的原因,卫星时间总会略微偏出系统时间,由此产生的误差定义为卫星时钟误差;卫星时钟误差Δt表示为如下二阶多项式:Δt=a0+a1(ts-toc)+a2(ts-toc)2 (4)式中,toc为星历参考时间,a0为星钟的零偏修正参数,a1为星钟的钟速修正参数,a2为星钟的钟速度率修正参数;步骤3、计算相对论效应修正量;北斗卫星在轨道上高速运行,对于地面接收机而言会产生很大的相对速度;根据相对论理论,卫星时钟会与地面时钟产生偏差;为修正此偏差带来的影响,在误差校正环节中必须补偿由相对论效应产生的误差,相对论效应修正量Δtr的计算公式为:式中,es为卫星轨道偏心率,as为卫星轨道长半径,Ek为卫星偏近点角,F为一个常数,定义为:式中,μ为引力常数;步骤4、通过修正卫星时钟总钟差值,得到修正后的信号发射时间;卫星时钟总钟差值δts为:δts=Δt+Δtr-TGD (7)式中,TGD为群波延时校正值;则修正后的信号发射时间t为:t=ts-δts (8)步骤5、计算发射时刻卫星的位置和速度;得到修正后的信号发射时间t后,代入卫星轨道理论中,得到信号发射时刻的卫星在轨道平面直角坐标系的位置和速度;卫星在地心地固直角坐标系的位置(xk,yk,zk)计算如下:式中,(x'k,y'k)为卫星在轨道平面直角坐标系的位置,ik为轨道倾角;Ωk为卫星轨道升交点赤经;卫星在地心地固直角坐标系的速度计算如下:式中,为卫星在轨道平面直角坐标系的速度,为轨道倾角ik对时间的导数;为卫星轨道升交点赤经Ωk对时间的导数;(x'k,y'k)、ik、Ωk、和均由导航卫星信号模拟器提供的星历数据计算得到;步骤6、判断对于接收机该卫星是否可见,如果不可见,则结束,如果可见,则进行步骤7;得到卫星位置(xk,yk,zk)后,已知接收机位置为(xr,yr,zr),则接收机到卫星的观测向量为:式中,ΔE、ΔN和ΔU分别为观测向量东、北和天向的分量,S为坐标转换矩阵,由接收机位置的经度λ和纬度φ定义:得到接收机到卫星的观测向量后,则卫星仰角θ为:如果卫星仰角大于0°,则卫星可见;如果卫星仰角小于等于0°,则卫星不可见,不能用于定位,结束迭代;步骤7、计算卫星与接收机之间的几何距离r和大气折射造成的传播延迟,更新信号传播时间τ,得到新的伪距,如果伪距精度满足要求,则结束,如果不满足,则将新的伪距重新代步骤1中,迭代计算直到满足要求;接收机到卫星的几何距离为:考虑大气折射造成的传播延迟,利用大气数学模型计算卫星信号传播的电离层延时I和对流层延时T,则:得到满足精度要求的伪距后,导航卫星信号模拟器生成相应的卫星信号发射出来,接收机接收卫星信号,处理后进行定位解算,即能够定位到仿真预先输入设置的位置和仿真时间,则能够在实验室内得到和外场相同的北斗卫星定位场景,用于测试接收机性能。
四大卫星导航系统伪距单点定位性能对比分解资料

四大卫星导航系统伪距单点定位性能对比摘要引言卫星导航定位系统的成功产生,促进了卫星导航定位市场这一新兴产业的发展。
全球卫星导航业务一直被美国的GPS即全球定位系统(Global Positi oning System )所垄断。
目前,GPS以其技术优势和廉价的使用成本,在全球得到广泛应用,涉及野外勘探、陆路运输、海上作业及航空航天等诸多行业,其相关产品和服务市场的年产值达80亿美元,成为当今国际公认的八大无线产业之一。
然而在海湾战争和阿富汗战争期间,欧洲使用的GPS系统曾经受到限制,而且定位精度也有所下降;尤其在科索沃战争中,美国还曾经单方面关闭过巴尔干地区的民用导航信号源。
GPS是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
在美国全面研制成功并运用到民事和军事领域后,全球各个大国发现了其潜在危机以及机遇。
随后,是俄罗斯的卫星系统“格洛纳斯GLONASS,是俄语中“全球卫星导航系统GLOBAL NAVIGATION SATELLITE SYST的缩写。
最早开发于苏联时期,后由俄罗斯继续该计划。
俄罗斯1993年开始独自建立本国的全球卫星导航系统。
紧接其后是中国的北斗导航系统,他于1994年启动北斗卫星导航试验系统建设。
在之后是欧洲的卫星导航系统。
2002年3月26日,欧盟首脑会议批准Galileo卫星导航定位系统的实施计划。
这标志着在2008年欧洲将拥有自己的卫星导航定位系统,并结束美国的GPS 独霸天下的局面。
第一章伪距单点定位根据观测值的不同,卫星导航系统单点定位可以分为伪距单点定位和相位单点定位。
其中伪距单点定位因速度快、不存在整周模糊度、接收机价格低等优势,被广泛用于各种车辆、舰船的导航和监控、野外勘测等领域。
伪距单点定位原理测码伪距是由卫星发射的码到测站的传播时间与光速的乘积所得的量测距离。
北斗卫星导航系统伪距差分定位技术分析
进行作业,一台称为基准站接收机,一台称为移动站接收机, 两台接收机互相协助作业。工作情况如下:两台接收机同时观 测与接收由北斗卫星传出的卫星信号,基准站接收机将根据已 知坐标点的坐标数据以及北斗的定位数据,对得出的数据进行 差分解算,然后将修正的误差数据发给移动站接收机,移动站 接收机将接收并且再次由数据进行修正,而后将数据传给卫 星,卫星将再次对接收到的数据进行修正,通过该方法,可达 到提高信号定位精准度的目的[1]。
引言 北斗卫星导航系统是中国着眼于国家安全和经济社会发
展,需要自主建设运行的全球卫星导航系统,其使用范围覆 盖全球,向全球用户开放,提供全天候、全天时、高精度的定 位、导航和授时服务的国家重要时空基础设施。随着人们对于 定位精准度的高度需求,也就产生了差分技术,差分技术根据 修正信息种类的不同可以分为位置差分、载波相位差分以及伪 距差分三种,本文将通过对伪距差分技术进行分析,简述其对 北斗卫星导航系统精准定位的影响。
2.2 伪距差分技术的应用现状 伪距差分技术能够得到米级定位精度,是目前差分技术当 中应用最广的一种差分。值得注意的是,北斗卫星导航系统伪 距差分技术的定位精准度会随着移动站接收机与基准站接收机 之间的距离发生改变,相距距离越短,北斗系统定位精准度越 高。伪距差分技术的应用优点是:基准站提供所有卫星的改正 数,用户接收机只需观测任意4颗卫星就可以完成精准定位;其 缺点就是前文说到的:差分精准度会随基准站到用户的距离改 变而改变,这就会导致在某些时候,会出现较大技术误差。
4 结束语 北斗卫星导航系统的精准度一直是我国致力于研究的科研
项目,且目前已取得一定的成效,但是在各国科技竞争日益加 强的今天,还需要不断的探索进步。北斗卫星导航系统伪距差 分定位技术在导航系统中运用越来越广泛,精度也越来越高, 具有良好的发展前景。北斗卫星导航定位系统发展至今,已 成为美国GPS,俄罗斯GLONASS之后第3个成熟的卫星导航系 统。目前的北斗卫星导航定位系统也还需要不断完善与改进, 需要对差分技术等相关技术做出更多的研究与探讨,选用合适 的技术,才能完成这一重要的科研任务。
GNSS伪距差分定位及其特色──GNSS卫星导航定位方法之二
数据;基准接收机基与动态接DGNSS数据链。
由此可知,所谓“DGNSS 数据链”,就是一种用于作差分导航定位的无线电收发设备。
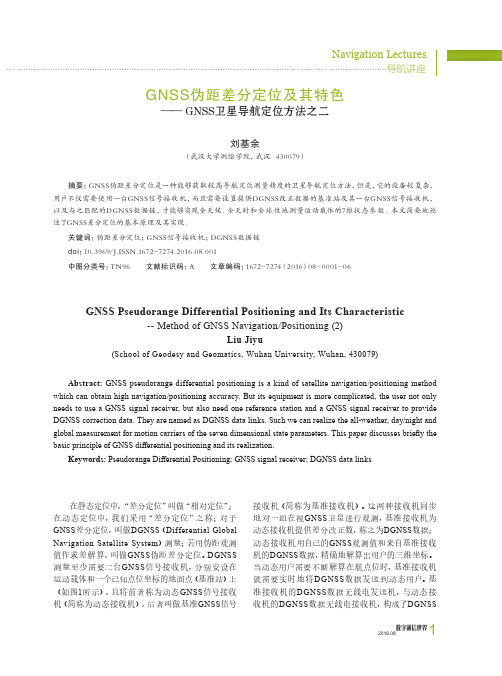
图1 实时DGNSS 测量的基本结构1 DGNSS测量的类型1.1 按数据处理方式之异分类依据DGNSS 测量数据处理方式之异,可分成下列类型:(1)实时DGNSS 测量。
站际之间实施DGNSS 数据传输(如图1所示),动态用户在航作实时数据处理,而不断解算出用户的三维坐标。
(2)后处理D G N S S 测量。
站际之间不进行DGNSS 数据传输,而是在DGNSS 测量之后,对动态接收机和基准接收机的GNSS 观测数据进行联合解算,求得动态用户在各个时元的三维坐标。
例如,GNSS 航空摄影测量技术,就是采用后处理DGNSS 测量。
1.2 按DGNSS数据之异分类随着基准接收机所提供的DGNSS 数据不同,而分成下列类型:(1)位置DGNSS 测量。
基准接收机向动态用户发送的DGNSS 数据,是“位置校正值”,以此改正动态用户所解算出的三维位置。
(2)伪距DGNSS 测量。
基准接收机向动态用户发送的DGNSS 数据,是“伪距校正值”,以此改正动态用户所测得的伪距,进而解算出动态用户的三维位置。
(3)载波相位DGNSS 测量。
基准接收机向动态用户发送的DGNSS 数据,是“载波相位测量校正值”,以此改正动态用户所测得的载波滞后相位,进而解算出动态用户的三维位置。
2 位置DGNSS测量位置DGNSS 测量是一种较简单的差分定位模式,虽然它的组成与图1一样,但是,基准接收机向动态用户发送的DGNSS 数据,是如下所述的位置校正值(1)式中,X R ,Y R ,Z R 为基准接收机所测得的基准站三维坐标;X R0,Y R0,Z R0为基准站在GNSS 大地坐标系内的已知三维坐标。
若基准站的已知三维坐标,是属于地方大地坐标系,则需要进行坐标变换,才可算得位置校正值。
动态接收机,既测定动态用户的三维坐标,又接收来自基准接收机的位置校正值(ΔX R ,ΔY R ,ΔZ R ),而用后者改正它自己所测得的三维坐标(X k m , Y k m , Z km ),即可求得动态用户的下述精确位置(2)式中,X km ,Y km ,Z km 为动态接收机测得的动态用户三维坐标;ΔX R ,ΔY R ,ΔZ R 为来自基准接收机的位置校正值;X k ,Y k ,Z k 为经过差分测量改正的动态用户三维坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北斗卫星导航系统伪距差分定位技术的分析文章介绍了北斗卫星导航系统(BDS)的伪距差分定位模型。
结合GPS的伪距差分定位模型对该模型进行了比较,并对北斗导航系统的整体情况进行了介绍和概述,对比计算基线结果的精度,结果表明北斗导航系统的伪距差分可以达到亚米级的精度,对BDS地基的加固施工提供了新方向;同时还讨论了BDS卫星可见数对伪距差分定位的影响,对以后的工作提供指导借鉴。
标签:北斗卫星导航系统;伪距差分定位;定位技术Abstract:This paper introduces the pseudo-range differential positioning model of BeiDou satellite navigation system (BDS). Based on the pseudo-range differential positioning model of GPS,the model is compared,the overall situation of BeiDou navigation system is introduced and summarized,and the accuracy of baseline results is compared. The results show that the pseudo-range difference of the BeiDou navigation system can reach the accuracy of sub-meter level,which provides a new direction for the construction of BDS foundation reinforcement,and the influence of the visible number of BDS satellites on the pseudo-range differential positioning is also discussed.Keywords:BeiDou satellite navigation system (BDS);pseudo range differential positioning;positioning technology1 概述BDS即指北斗衛星导航系统,该系统是世界四大导航定位系统之一,同时还有美国GPS,俄罗斯GLONASS和欧盟伽利略系统。
北斗卫星导航系统的发展非常迅速,到2012年完成了为亚太地区大部分地区提供定位、导航和短文通信服务功能服务,具有特色的短消息通信功能的特点。
现在,国内许多省市都积极推进北斗基础强化体系统的建设,以迎合相关行业和公众用户对亚米级和米级定位的增长需求。
但目前的研究重点主要集中在利用载波进行精确计算,这需要计算整周的未知数,并且观测值的周跳数的影响有很多因素。
对于精度要求不高、需要实时定位或快速定位的要求,GPS伪距差分定位早已可以达到此要求。
本文研究了BDS伪距差分定位,探讨了BDS和GPS 时间系统分析与坐标系统的区别,和其对伪距差分定位的影响,两基线分别使用BDS和GPS来分析计算伪距差分,以此对比BDS和GPS伪距差异结果的区别。
2 北斗导航系统的概述2.1 北斗导航系统的特点(1)定位精度:通过设计,北斗2号的导航系统的定位精度相近于GPS的导航精度,尤其在北斗采用差分定位技术后,其定位性能得到了很大提升,精度可以达到厘米级别。
(2)授时精度:北斗导航系统的授时功能是其一大特点,主要有单向和双向授时两种,系统会不间断地向接收机传递相关信息,用户可以对北斗卫星系统进行定时校正和时间差的修正。
(3)短文通信功能:北斗卫星具有双向短消息通信功能,使用户不只能够接收卫星的定位信号,同时也能够发射信号,用户通常可以向其他用户,地面控制站等发送定位信息,这是定位和发送用户信息更重要的一种功能。
这在目前的其他定位系统中都不具备的功能。
2.2 国内外精确定位技术的研究现状目前在国内,中国国家测绘局自1993年便开始建立永久性GPS跟踪站,主要用于精确定位、动态监测等,首次采用网络RTK技术进行精确定位的城市是深圳,拥有CORS系统,定位误差仅有3厘米,此外在北京,武汉,海南,上海等中国的其他城市也同时拥有跟踪站,并进行常规差分、广域差分、后处理等精密定位服务,但采用单频接收机仍占主导地位。
随着我们的北斗卫星导航系统的不断完善,国内对北斗卫星精密定位服务系统进行研究的学者也有许多,国内大部分CORS系统不支持北斗系统,而且还在部分地区设立了北斗CORS实验网,来研究北斗高精度定位技术。
同时北斗RTK技术也应用在了淮南煤矿的沉降问题、农业精准自动化操作问题以及军事等内容上。
在国外一些发达国家如:美国,韩国,德国等,RTK技术早已得到测试和推广,在日本东京地区已经拥有了六个网络RTK系统的基准站。
在电离层极其恶劣的情况下,它的网络定位精度仍然只有三厘米,此网络也在不断扩大,很快就可以成为国家级的RTK网络。
另外,在日本地质研究所建立了地壳形变监测网络,并逐步开发了COSMOS系统。
在美国大地测量委员会的领导下,建立了137个连续运行的参考站基站系统网络,基站配备双频接收机,所有系统基站规划开发到250个左右。
如:美国为加利福尼亚州Pacoima大坝的监测建立了GPS 自动化连续监测系统,GPS网络由一个基站和两个流动站构成,两年的观测数据分析表明变形可以检测到毫米级。
加拿大有一个主动控制网络系统(CACS)作为动态检测的框架,通过网络获取GPS的相关数据,事件后在进行精确定位,同时提供卫星时钟差,电离层模型和精确日历的差分校正模型,可以看出差分定位模式已成为精确定位的主要方法。
3 坐标系统及时间系统用于BDS的坐标系统是2000中国大地坐标系,代号为CGCS2000。
此坐标系和GPS中的WGS-84坐标系相似,CGCS2000也是协仪地球坐标系。
地球的质心即为此坐标系的原点,IERS规定的参考极(IRP)方向即为Z轴的方向,而IERS表示的参考子午面和过原点且和Z轴垂直的赤道面的交线为X轴,Y轴和X轴以及Z轴构成右手坐标系。
WGS-84和2000中国大地坐标系之间的精度区别基本只是分米级。
所以,本文进行的研究不需要进行坐标系的变换。
北斗卫星导航系统采用北斗时间(BDT)和GPS时间都是协调世界时间(UTC),它們之间采用的计算时间起点不同。
北斗的起始时间是2006年1月1日00分00秒的协调世界时。
GPS时间从1980年1月6日开始,协调世界时间00分00秒,时间非闰秒,连续累加。
通过计算机计算北斗的周期和GPS周期的计算差值为1356周,北斗秒和GPS秒差值为14秒。
4 北斗导航系统伪距差分定位技术及算法4.1 北斗导航系统的伪距差分定位技术北斗卫星导航系统采用的是无线电伪距差分定位技术,伪距测量的传播信号就是测距信号,伪距测量信号用于距离测量信号的传输,测距码的传输原理是:从卫星接收机捕获时间t1信号开始,捕获信号的同时,接收机根据自身的时钟产生一个与卫星信号相同的距离测量信号,接收机的时间坐标平移,直到与卫星信号相关联,然后停止移动,移动时间长度为Δt,传播时延乘以光传播时间t 就得到卫星到接收机之间的伪距。
伪距不是卫星与接收机之间的实际距离,在实际的传播过程中,各种因素的叠加在实际距离上产生了各种误差,为了区别实际距离,因此称为伪距,常用p 来表示,伪距误差产生的主要因素有:卫星时钟差、接收机时钟差,以及各种空间传播误差如电离层,对流层等的影响。
伪距定位的公式表示为:?籽=r+?啄tu-?啄t(r)+I+T+?着4.2 北斗伪距定位解算算法4.2.1 伪距解算改进模型最小二乘迭代法和位置偏差作为变量的卡尔曼滤波方法相互结合能够避免最小二乘定位精度低,卡尔曼滤波迭代次数多,对特征初始位置敏感等缺点,但要进一步改善伪距位置的精度,还可以直接使用流动站位置作为状态变量,并结合L-M算法进行修改。
4.2.2 最小二乘迭代法最小二乘法迭代法是最常用的一种线性求解方法,接收器位置计算模型是一个非线性模型,因此我们必须用泰勒级数展开法对模型进行线性化建模,最小二乘法迭代法求解最优解的基本原理是最小化误差的平方和。
采用此方法进行计算接收器的位置的计算步骤如下:首先,根据四个卫星的位置得出四个伪距方程,其次,将得到的四个伪距方程按照泰勒级数进行线性化展开,得到线性化后的公式;再次,确定它的初始大概位置为原点,把初始坐标代入到伪距接收机的坐标系中进行计算;最后公式线性化后在利用有关公式进行计算。
得到四个偏差值和初始位置,其相加得到接收机的位置,以此步骤进行迭代,直到得到历元解算。
4.2.3 改进的卡尔曼滤波法相似与最小二乘法,卡尔曼滤波则可以称为一种线性估计方法,但这种算法的去噪能力和计算效率要优于最小二乘迭代法,是一种最优估计技术,利用测量方程和状态方程来计算处理,使得统计估计上的误差最小,由于卡尔曼滤波器的优点,对卫星导航定位算法具有良好的性能,可以提高卫星定位的可靠性,准确性和稳定性。
由于北斗定位信息的求解过程是非线性的,卡尔曼滤波不能进行最优估计,因此在使用之前要通过线性化,将非线性系统转化为线性系统,本文直接对伪距方程进行线性化处理。
5 结束语本文通过分析研究北斗的伪距差分定位模型,对两条典型的基线做出了对比分析和伪距的差分计算,得到几个相关的结论:首先,在相同的短基线的初始条件下,北斗导航系统和GPS导航系统的伪距差分都非常的精确,定位精度均可以达到亚米级别。
第二,如果对于定位的精度要求不是很高的情况下,则能够采用伪距差分定位来替代载波相位差分定位方法,这样做可以提高工作效率。
此外,伪距差分定位的结果也能够供整周模糊度解算进行借鉴和参考。
第三,卫星能见度对伪距差分的结果会产生有很大的影响。
当北斗导航系统和GPS卫星的能见度变化相似时,由于GPS卫星的可见度大于北斗卫星的能见度,因此GPS结果的准确度较高且稳定。
如果GPS卫星能见度变化较大,则北斗导航结果的精度较高且稳定。
参考文献:[1]范龙周,柴洪洲,茹春雨,等.定位精度的方法和研究在北斗卫星导航系统中的应用[J].中国科技学报,2010,30(10):24-26.[2]兰孝奇,张兵良,黄继红,等.伪距差分定位技术在导航技术中的试验研究[J].河海大学学报·自然科学版,2010,32(23):300-321.[3]中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件公开服务信号[R].中国卫星导航系统管理办公室,2013.[4]杨喜庆,李华孔,徐俊毅,等.中国北斗卫星导航系统在全球导航系统中的地位[J].科学杂志,2012,23(2):11-14.[5]魏子清,陆亚峰,楼立志,等.北斗卫星导航和GPS组合伪距单点定位精度的研究[J].测绘出版社,2014,33(6):1-5.。