最新主轴动态回转精度测试介绍
主轴动态回转误差测试及分析
主轴动态回转误差测试及分析作者:沈阳机床来源:《CAD/CAM与制造业信息化》2013年第03期本文探讨了关于数控机床主轴动态回转误差的测试及分析问题,首先简要介绍了回转误差的组成、产生的原因及对加工精度的影响等,然后深入研究了回转误差的计算和分析,并编制了分析程序,提供了具体的分析实例。
一、引言机床主轴回转轴误差运动是指在回转过程中回转轴线偏离理想轴线位置而出现的附加运动,是评价机床动态性能的一项重要指标,是影响机床工作精度的主要因素。
回转轴误差运动的测量和控制,是各种精密设备及大型、高速、重载设备的重要技术问题之一。
通过对回转轴误差运动的测定,可以了解回转轴的运动状态和判断产生误差运动的原因。
机床主轴回转误差的测量方法有打表测量、单向测量和双向测量等。
造成机床回转误差的原因有主轴传动系统的几何误差、传动轴偏心、惯性力变形和热变形等误差,也包括许多随机误差。
通过径向跳动量和轴向窜动量测试实验可以有效满足对回转精度测量的要求。
二、回转误差的运动组成机床主轴的回转误差可以分为三种基本形式:①与回转轴线平行的轴向位移(纯轴向窜动);②与回转轴线平行的径向位移(纯径向跳动);③倾斜(纯角度摆动)。
如图1所示。
一般情况下,这三种基本形式的误差是同时存在的,产生的加工误差也是三种形式误差影响的叠加。
径向误差的大小取决于测量头的轴向位置,轴向误差的大小取决于测量头在测量平面上的径向位置。
因此必须说明评定时选择的轴向和径向位置。
三、回转误差产生的原因机床主轴回转误差产生的原因是多种多样的,各种原因对机床主轴运动的影响也不尽相同。
一方面有机床主轴传动系统的几何误差、转动轴系质量偏心产生的误差、所受惯性力变形产生的误差及设备热变形产生的误差等系统性(确定性)误差。
如机床主轴轴系中的轴套、机床主轴轴颈及滚动体的形状误差,特别是滚动件有尺寸误差时,机床主轴将产生有规律的位移。
另一方面,机床主轴回转误差产生的原因还有许多随机误差,如工艺系统的振颤对机床主轴回转的影响等。
X62W铣床主轴回转精度的测定及数据处理

图4
图5
对上面图象的处理 , 采用离散化后在数字计算机 上计算的办法 。本测定采用将图象局部放大 , 在径向 ( 谐波函数是在 Y 向) 取足够数量的点直接量得 。首 先求得其最小二乘圆 , 即求出 “使足够数量的总误差 运动板图象均布径向偏差的平方和为最小的圆” , 并 以此最小二乘圆作为标准圆 , 与实测曲线比较 , 其最 大半径差即认为是主轴的回转精度 。 3 回转误差的数理分析 笔者从最小二乘圆的定义出发 , 推导出了要在计 算机上求解的迭代方程 。具体推导如下 , 如图 6 所 示 , 回转精度测试曲线呈正弦曲线 , 这是因为标准球 在装配时与铣床主轴轴线存在偏心 。
∑
2 R0 ( xi - a)
( xi - a) 2 + ( yi - b) 2 2 R0 ( yi - b)
- 2 ( xi - a)
=0
9Q - 2 ( yi - b) = 0 = ∑ 9b ( xi - a) 2 + ( yi - b) 2 i =1 在上述超越方程中直接解得 a , b , R0 是困难 的 , 决定对其逐次逼近求得 , 建立迭代公式 :
97
n
a1 =
i =1
∑x
n
n
i
-
R0 n R0 n
n
i =1
∑
n
x i - a0 ( xi - a0) 2 + ( yi - b0) 2 y i - b0 ( xi - a0) 2 + ( yi - b0) 2
简要叙述机床回转轴回转精度检测的实验方案
简要叙述机床回转轴回转精度检测的实验方案如何检测机床主轴回转的精度【按】由于机床回转误差可能会造成主轴传动系统的几何误差、传动轴偏心、惯性力变形、热变形等误差,也包括许多随机误差,所有机床主轴回转精度的检测,便成了评价机床动态性能的一项重要指标。
通过径向跳动量和轴向窜动量测试实验可以有效的满足对回转精度测量的要求。
检测机床主轴回转精度的方法有打表测量、单向测量、双向测量等几种。
一、机床主轴回转精度测量的理论与方法机床主轴回转精度是衡量机械系统性能的重要指标,是影响机床工作精度的主要因素。
机床主轴回转误差的测量技术对精密机械设备的发展有着重要作用。
机床主轴的回转误差包括径向误差和轴向误差。
轴向回转误差的测量相对比较简单,只需在机床主轴端面安装微位移传感器,进行一维位移量的测量即可。
因此机床主轴回转误差测量技术的研究焦点一直集中在径向误差的精确测量上。
(参阅数控机床主轴轴承的温度控制与其工作原理阐述)1)打表测量方法早期机床主轴回转精度不太高时,测量机床主轴误差的常用方法是将精密芯棒插入机床主轴锥孔,通过在芯棒的表面及端面放置千分表来进行测量。
这种测量方法简单易行,但却会引入锥孔的偏心误差,不能把性质不同的误差区分开,而且不能反映主轴在工作转速下的回转误差,更不能应用于高速、高精度的主轴回转精度测量。
除此之外也有采用测量试件来评定主轴的回转误差。
2)单向测量方法单向测量法又称为单传感器测量法。
由传感器拾得“敏感方向”的误差号,经测微仪放大、处理后,送入记录仪,以待进一步数据处理。
然后以主轴回转角作为自变量,将采集的位移量按主轴回转角度展开叠加到基圆上,形成圆图像。
误差运动的敏感方向是通过加工或测试的瞬时接触点并平行于工件理想加工的表面的法线方向,非敏感方向在垂直于第三方向的直线上。
单向测量法测量的主轴回转误差运动实质上只是一维主轴回转误差运动在敏感方向的分量。
因此单向测量法只适用于具有敏感方向的主轴回转精度的测量,例如工件回转型机床。
主轴回转精度动态测试技术研究

主轴回转精度动态测试技术研究摘要:随着磨床技术发展,对主轴回转精度的要求越来越高。
回转精度包括了轴的径向误差、轴向误差、角度误差及由此衍生出的表面误差和半径误差五种。
其中,径向误差尤其重要。
对于径向误差的动态测量及分析,我们采用了单向测量法和双向测量法,测得主轴不同转速下的同步误差值及非同步误差值,以选取主轴最佳磨削转速。
关键词:同步误差非同步误差径向误差引言自20世纪五十年代开始,我国磨床发展历程中,主轴类零件的制造精度要求一直被设计师认为能够完全实现。
因此,在制造过程中,轴类零件的几何精度要求并不是难点。
社会发展至今,由于汽车工业及计算机技术领域发展的需要,对零件的加工精度要求不断提高,甚至达到了微米级以上。
此种情况下,为了满足市场需求,生产高精度磨床就成为必然。
而主轴的回转运动误差是影响机床加工精度的主因之一。
因此,对高精度磨床的开发,研究主轴回转的动态特性具有现实的重要意义。
在日常生产中,如果磨床达不到磨削精度要求时,我们通常的做法是采取增加机床刚性、结构阻尼、改变零件几何形状以及降低磨床温升等方法来改进磨削性能。
但是,这些改进措施仅能从表面上对磨床工作精度有所改进,根本不能改变磨床的基本性能,即对提升磨床性能作用不大。
我们需要了解主轴性能,通过对主轴的动态测量,将主轴各项运动误差用数据准确地描述出来,以些为据,判断磨床的改进方向,从而准确预测及控制工件加工质量。
1 主轴运动误差在主轴动态回转特性中,通常存在三个基本误差:①径向误差;②轴向误差;③角度误差。
在此三个基本误差的基础上,又可以衍生出两个复合误差:①表面误差;②半径误差。
表面误差是由轴向误差和角度误差共同作用产生的,而半径误差是由径向误差和角度误差共同作用产生的。
对主轴精度影响最大是应该是径向运动误差。
如(图1)所示,当主轴在低速转动时,不会产生角度偏移,也不会发热,此时得到的是一个纯半径的运动误差,轴向误差与角度误差可以忽略不计,并不存在两个复合误差。
机床主轴回转精度测试4-600
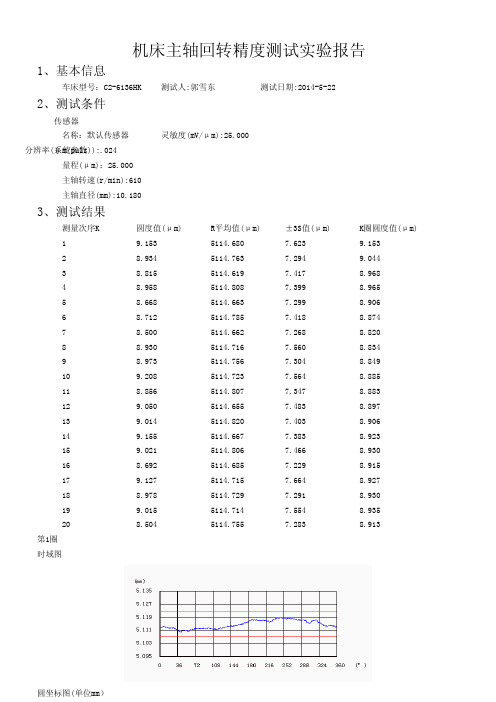
机床主轴回转精度测试实验报告1、基本信息车床型号:C2-6136HK测试人:郭雪东测试日期:2014-5-222、测试条件传感器名称:默认传感器灵敏度(mV/μm):25.000分辨率(μm/puls)):.024系统参数量程(μm):25.000主轴转速(r/min):610主轴直径(mm):10.1803、测试结果测量次序K圆度值(μm)R平均值(μm)±3S值(μm)K圈圆度值(μm)19.1535114.6807.6239.15328.9345114.7637.2949.04438.8155114.6197.4178.96848.9585114.8087.3998.96558.6685114.6637.2998.90668.7125114.7857.4188.87478.5005114.6627.2688.82088.9305114.7167.5608.83498.9735114.7567.3048.849109.2085114.7237.5648.885118.8565114.8077.3478.883129.0505114.6557.4838.897139.0145114.8207.4038.906149.1555114.6677.3838.923159.0215114.8067.4668.930168.6925114.6857.2298.915179.1275114.7157.6648.927188.9785114.7297.2918.930199.0155114.7147.5548.935208.5045114.7557.2838.913第1圈时域图圆坐标图(单位mm)频域图第2圈时域图圆坐标图(单位mm)频域图第3圈时域图圆坐标图(单位mm)频域图第4圈时域图圆坐标图(单位mm)频域图第5圈时域图圆坐标图(单位mm)频域图第6圈时域图圆坐标图(单位mm)频域图第7圈时域图圆坐标图(单位mm)频域图第8圈时域图圆坐标图(单位mm)频域图第9圈时域图圆坐标图(单位mm)频域图第10圈时域图圆坐标图(单位mm)频域图第11圈时域图圆坐标图(单位mm)频域图第12圈时域图圆坐标图(单位mm)频域图第13圈时域图圆坐标图(单位mm)频域图第14圈时域图圆坐标图(单位mm)频域图第15圈时域图圆坐标图(单位mm)频域图第16圈时域图圆坐标图(单位mm)频域图第17圈时域图圆坐标图(单位mm)频域图第18圈时域图圆坐标图(单位mm)频域图第19圈时域图圆坐标图(单位mm)频域图第20圈时域图圆坐标图(单位mm)频域图。
数控机床回转轴位置精度的自动检测
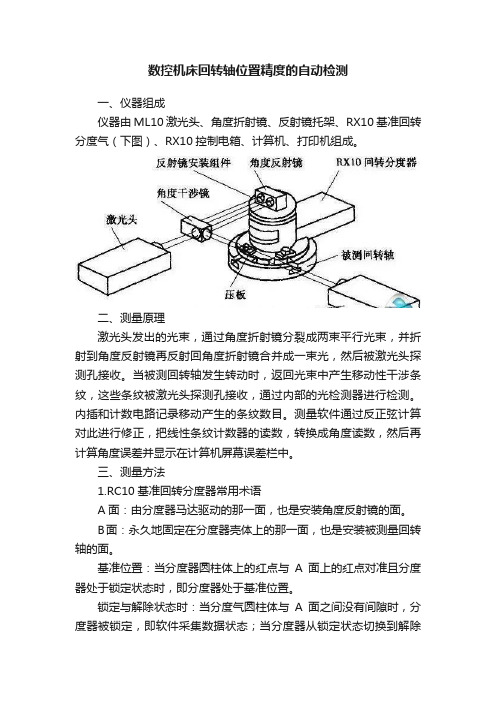
数控机床回转轴位置精度的自动检测一、仪器组成仪器由ML10激光头、角度折射镜、反射镜托架、RX10基准回转分度气(下图)、RX10控制电箱、计算机、打印机组成。
二、测量原理激光头发出的光束,通过角度折射镜分裂成两束平行光束,并折射到角度反射镜再反射回角度折射镜合并成一束光,然后被激光头探测孔接收。
当被测回转轴发生转动时,返回光束中产生移动性干涉条纹,这些条纹被激光头探测孔接收,通过内部的光检测器进行检测。
内插和计数电路记录移动产生的条纹数目。
测量软件通过反正弦计算对此进行修正,把线性条纹计数器的读数,转换成角度读数,然后再计算角度误差并显示在计算机屏幕误差栏中。
三、测量方法1.RC10基准回转分度器常用术语A面:由分度器马达驱动的那一面,也是安装角度反射镜的面。
B面:永久地固定在分度器壳体上的那一面,也是安装被测量回转轴的面。
基准位置:当分度器圆柱体上的红点与A面上的红点对准且分度器处于锁定状态时,即分度器处于基准位置。
锁定与解除状态时:当分度气圆柱体与A面之间没有间隙时,分度器被锁定,即软件采集数据状态;当分度器从锁定状态切换到解除锁定状态时,A面与分度器主体脱离,A面向上移动约2.5mm,随着被测量回转轴的转动,A面通过分度器的海司(Hirth)轴,以每5°为一节反向回转到被测量回转轴所转动的基准位置。
以确保激光光束能够返回到激光头探测孔里面。
2.测量采用RXIO回转轴精度测量软件以及相配套的基准回转分度器,把角度反射镜安装在基准回转分度器顶板(A面)上,再将基准回转分度器安装在被测量回转轴上,角度折射镜安装在机床比较合适的位置上(尽可能靠近基准回转分度器),然后调试激光干涉仪与角度折射镜和角度反射镜之间的光路准直,并确保基准回转分度器,在锁定与解除锁定状态下以及两个终端目标位置之间切换时,光路强度信号在测量范围之内。
开始测量时,首先确定测量基准位置,当被测量回转轴转动到某一个目标位置时,基准回转分度器从锁定状态切换到解除锁定状态,固定在基准回转轴分度器上的顶板(A面)与基准回转分度器主体脱离,顶板(A面)拖起角度反射镜向上移动约2.5mm,然后向相反方向以每5°为一节回转到被测量回转轴所转动的基准位置上。
主轴回转精度的测定

实验主轴回转精度的测定一、 概述随着机械制造业的发展,对零件的加工精度要求越来越高,由此对机床精度要求也越来越高。
作为机床核心——主轴部件的回转误差运动,直接影响机床的加工精度,它是反映机床动态性能的主要指标之一,在《金属切削机床样机试验规范》中已列为机床性能试验的一个项目。
多年来,国内外一直在广泛开展对主轴回转误差运动测量方法的研究,并取得一定的成果。
研究主轴误差运动的目的,一是找出误差产生的原因,另一是找出误差对加工质量影响的大小。
为此,不仅对主轴回转误差运动要能够进行定性分析,而且还要能够给出误差的具体数值。
过去流行的测试与数据处理方法,是传统的捷克VUOSO双向测量法和美国LRL单向测量法。
前者适用于测试刀具回转型主轴径向误差运动,后者适用于测试工件回转型主轴径向误差运动。
两种方法都是在机床空载或模拟加工的条件下,通过对基准球(环)的测量,在示波器屏幕上显示出主轴回转而产生的圆图象。
将圆图象拍摄下来便可用圆度样板读取主轴径向误差运动数值。
这种测试方法虽然能够在试验现场显示图形,直观性强,便于监视机床的安装调试,但也存在一些不足,如基准钢球的形状误差会复映进去,不能反映切削受载状态,存在一定的原理误差等。
所以测量精度难以提高,实际应用受到一定限制。
经过多年的研究,目前主轴误差运动主轴误差运动的测试与数据处理方法有了很大的改进,引入频镨分析理论和FFT变换技术,通过用计算机来进行测量数据处理,使整个测量过程更方便、数据处理更科学、测量结果更正确。
二、 实验目的1.了解机床主轴回转误差运动的表现形式、定义、评判原则、产生原因及对机床加工精度的影响。
2.懂得主轴回转误差的测量方法及实验原理。
三、 主轴径向误差运动的测试原理及方法1.主轴回转误差运动主轴回转时,在某一瞬时,旋转的线速度为零的端点联线为主轴在该瞬时的回转中心线。
理想情况下,主铀回转中心线的空间位置,相对于某一固定参考系统应该是不随时间变化的。
超精密车床主轴回转精度动态测试仿真

摘要 : 该文提出了用两点误差分离法动态测试超精密车床主轴回转误差运动和基准轴圆度误差的方法 , 建立了数学模型并 进行了仿真 。仿真表明回转误差运动中的偶次分量不会影响测试精度 , 而奇次分量会影响 , 但测试原理误差主要来自三次 分量 ,而三次分量的影响很小 ,所以该测试方法切实可行 。 关键词 : 超精密车床 ; 主轴 ; 回转误差运动 ; 动态测试 ; 误差分离技术 ; 仿真 中图分类号 : TH161 文献标识码 :B
第 19 卷 第6期
文章编号 :1006 - 9348 (2002) 06 - 0096 - 04
计 算 机 仿 真
2002 年 11 月
超精密车床主轴回转精度动态测试仿真
黄长征1 , 李圣怡2
(1. 韶关大学 ,广东韶关 512005 ;2. 国防科技大学 ,湖南长沙 410073)
传感器 S 1 和 S 2 分别测得第 0 点的信号 S 1 (θ 0 ) 和 S 2 (θ 0) :
S 1 (θ 0 ) = R (θ 0 ) + e (θ 0) ) - e (θ S 2 (θ 0 ) = R (θ 0 - π 0) ( 1) ( 2)
因车床主轴回转径向误差运动有在同一方位大小不变 的性质 , 所以当主轴转过 180° 如图 1 ( b) 示 , 传感器 S 1 和 S 2 这 时所测得第 ( n/ 2) 点的信号 S1 (θ n/ 2 ) 和 S 2 (θ n/ 2 ) 分别为 :
a11 =
图3 动态测试系统总体结构图
5 测试原理仿真
( 15)
2
n
n- 1
i =0
ΔS1 (θ) ∑
i
n- 1
・ cos (θ i) ・ sin (θ i)
主轴回转精度测量方法

[ 10 ] ( 美) 马尔金 S. 磨削技术理论与应用[M] . 蔡光起, 等译. 沈阳: 东
第一作者: 熊金奎, 男, 1976 年生, 研究生, 从事先
* 国家自然科学基金资助( 50675155 ) · 176 ·
文章编号: 111251 如果您想发表对本文的看法, 请将文章编号填入读者意见调查表中的相应位置。
主轴回转精度测量方法
姚
摘
*
俊
王
平
( 天津科技大学机械工程学院, 天津 300222 ) 要: 首先介绍了各种机床主轴回转精度测量方法及其原理, 包括单点法 、 双点法、 三点法、 虚拟仪器法、 CCD 法和轴向窜动误差的测量; 然后介绍了测量数据的处理和误差分析方法, 指出各种测量方法的 特点, 并总结了各种测量方法的一般性选择原则 。 关键词: 主轴回转精度 中图分类号: TH133. 2 测量 数据处理 误差分析 文献标识码: B
以主轴上位置 2 ( 图 1a ) 为起始位置进行测量, 得 出相应的误差信号为 T1 ( θ) , 可以表示为 T1 ( θ ) = R ( θ ) + d ( θ ) + r ( θ ) ( 1) 两个特性非常接近的电容式位移传感器 S1 和 S2 在圆周方向相隔 180° 对称安装, 主轴回转一圈采样 n 个点, 所测信号包括被测件圆度误差信号 R ( θ) 和主轴 回转误差信号 e ( θ ) 。 开始位置如图 3a 所示, 传感器 分别测得第 O 点的信号 S1 ( θ0 ) 和 S2 ( θ0 ) 为 S 1 ( θ0 ) = R ( θ0 ) + e ( θ0 ) ( 4)
[ 1 ]
测环节使用, 方法复杂。
主轴回转精度的测定

实验主轴回转精度的测定一、 概述随着机械制造业的发展,对零件的加工精度要求越来越高,由此对机床精度要求也越来越高。
作为机床核心——主轴部件的回转误差运动,直接影响机床的加工精度,它是反映机床动态性能的主要指标之一,在《金属切削机床样机试验规范》中已列为机床性能试验的一个项目。
多年来,国内外一直在广泛开展对主轴回转误差运动测量方法的研究,并取得一定的成果。
研究主轴误差运动的目的,一是找出误差产生的原因,另一是找出误差对加工质量影响的大小。
为此,不仅对主轴回转误差运动要能够进行定性分析,而且还要能够给出误差的具体数值。
过去流行的测试与数据处理方法,是传统的捷克VUOSO双向测量法和美国LRL单向测量法。
前者适用于测试刀具回转型主轴径向误差运动,后者适用于测试工件回转型主轴径向误差运动。
两种方法都是在机床空载或模拟加工的条件下,通过对基准球(环)的测量,在示波器屏幕上显示出主轴回转而产生的圆图象。
将圆图象拍摄下来便可用圆度样板读取主轴径向误差运动数值。
这种测试方法虽然能够在试验现场显示图形,直观性强,便于监视机床的安装调试,但也存在一些不足,如基准钢球的形状误差会复映进去,不能反映切削受载状态,存在一定的原理误差等。
所以测量精度难以提高,实际应用受到一定限制。
经过多年的研究,目前主轴误差运动主轴误差运动的测试与数据处理方法有了很大的改进,引入频镨分析理论和FFT变换技术,通过用计算机来进行测量数据处理,使整个测量过程更方便、数据处理更科学、测量结果更正确。
二、 实验目的1.了解机床主轴回转误差运动的表现形式、定义、评判原则、产生原因及对机床加工精度的影响。
2.懂得主轴回转误差的测量方法及实验原理。
三、 主轴径向误差运动的测试原理及方法1.主轴回转误差运动主轴回转时,在某一瞬时,旋转的线速度为零的端点联线为主轴在该瞬时的回转中心线。
理想情况下,主铀回转中心线的空间位置,相对于某一固定参考系统应该是不随时间变化的。
数控车床精度检测
数控车床的几种精度检测数控机床进行检测验收时,评定产品精度状态及合格与否的主要依据是按照“精度检验”、“技术条件”、“质量分等”等有关标准所规定的内容和检项进行.一、静态检测内容及方法1、滚珠丝杠的窜动、回动检测(1)方法及要求在机床某一方向滚珠丝杠的轴端中心孔内放入一粒一级精度的钢球(选丝杠的约束止推端;中心孔一定要清洁干净;钢球用优质的黄油粘着上)。
将千分表吸合固定在刚性牢固的合适部位,表触头垂直接触到钢球的中心部位并表针刻度校零。
转动手摇脉冲发生器驱动丝杠向一个方向慢慢旋转的同时观察表针的摆动量,要求表针摆动值在3μm内时为合格。
此为丝杠的轴向窜动。
转动手摇脉冲发生器驱动丝杠向一个方向慢慢旋转并待表针相对稳定时突然反摇,观测表针的摆动值,要求表针摆动值在3μm内时为合格。
此为丝杠的轴向回动。
(2)超差时反映的主要问题:①丝杠支撑轴承的精度不够;约束止推端的轴承外环没有用端盖压紧或轴承内环没有用螺母背紧,致使轴承内、外环之间存有未消除的间隙。
②轴承在壳体内安装位置不佳、歪了或是丝杠三点支撑(进给箱、丝母座及轴承支座)之间的同轴度太差。
③此项精度超差会影响该进给轴的重复定位精度和定位精度,致使工件加工精度下降。
2、丝杠螺母处滚道的窜动、回动检测(1)方法及要求将千分表吸合固定在机床大拖板合适的部位,表触头接触到丝杠滚道一侧的中径处(与丝杠轴线呈45°角接触)并表针刻度校零。
同滚珠丝杠轴端的窜动、回动检测方式一样,摇动手要脉冲发生器进行检测,表针摆动值在3μm内时为合格。
(注:滚道的左、右两个侧面均要进行检测。
)(2)超差时反映的主要问题:①滚珠丝杠制造精度不良,丝杠与螺母之间有未消除的间隙。
②丝杠三点支撑之间的同轴度太差。
③螺母支座及螺母法兰盘处制造、安装精度差,改变了合格的丝杠精度。
同样,此项检测超差时会影响机床的重复定位精度和定位精度。
二、动态检测内容及方法(热性能检测)1、主轴的热性能车削检测(1)方法及要求将40件φ60mm的黄铜试料分成4组,每组10件。
主轴动态精度测试方法【教程】
主轴作为精密加工机床的核心部件,影响着机床加工精度。
机床的工作性能和寿命都会受到主轴动态误差的影响。
加工工件的圆度、表面粗糙度和平面度都与主轴有关。
通过对主轴动态精度进行测试和分析,为进一步提高机床的加工精度,研发改良型号的机床提供数据支持和理论保障。
因此,主轴的动态误差测试具有重要意义。
国内外很多学者对主轴动态误差进行了大量的研究。
孙艳芬[1]介绍了主轴回转误差的概念及其基本形式,分析了它对加工精度的影响。
王莹等人[2]对主轴系统动态误差和热漂移误差进行了测试与分析。
朱永生等[3]对主轴动态回转误差进行了实验研究,测试分析了主轴回转误差受转速的影响。
许颖等人[4]研究了主轴转速和温升对主轴动态误差的影响。
刘阔等人[5]在不同的转速下对主轴的动态误差进行了测试,并对主轴动态误差随转速的变化进行了分析; 包丽等人[6]结合模态对加工中心主轴动态误差进行了研究。
靳岚等人[7]同时在两个方向上对主轴的回转误差进行动态测试。
以上研究对于主轴动态误差研究有着很大实用价值,实验往往对单一机床在一种测试方法下对主轴进行动态测试,缺乏对比,没有考虑到安装、工况对主轴精度的影响,不能发现同一类型机床产品主轴动态精度变化的普遍规律。
文中对同一批次、同一型号的3 台立式加工中心,分别对主轴动态误差进行测试。
主轴的动态误差测试主要包括径向动态误差、轴向动态误差、最小径向间隙。
综合比对、分析3 台机床数据异同,找出主轴动态误差较大的普遍原因,以提高主轴工作运行的平稳性和加工精度。
1 、主轴动态误差概念及其影响因素主轴动态误差就是主轴在一定转速工作下的回转误差,机床主轴回转是机床最基本的成型运动,是决定工件圆度的主要因素之一。
主轴回转精度可以定义为: 主轴回转线在回转时相对于其平均周线的变动量在误差敏感方向的最大位移[8]。
它可以是径向跳动、轴向跳动或摆动,如图1 所示。
一般情况下3 种误差同时存在,并相互叠加,影响主轴精度。
高速主轴回转误差动态测试与分析
高速主轴回转误差动态测试与分析靳岚;燕昭阳;谢黎明;苟卫东;施东兴【摘要】It applies two-way method to design a testing system to do the dynamic testing of spindle's rotational error. The system consists of one high precision of standard rod, two non-contact displacement sensors and one LMS TEST. LAB of collector. It expounds the principle of the testing of rotational errors, for the eccentric proposition of standard rod in testing of spindle, and proposes an effective solution, and takes an experimental study.%应用双向法设计测试系统,对主轴的回转误差进行动态测试.该系统由高精度标准棒、非接触位移传感器和LMS TEST,LAB采集器组成.阐述了回转误差的测试原理,针对机床主轴测试中标准棒的安装偏心问题,提出了有效解决方法,并进行了实验研究.【期刊名称】《制造技术与机床》【年(卷),期】2012(000)004【总页数】3页(P93-95)【关键词】回转误差;偏心;最小二乘法;高速主轴【作者】靳岚;燕昭阳;谢黎明;苟卫东;施东兴【作者单位】兰州理工大学机电工程学院,甘肃兰州 730050;兰州理工大学机电工程学院,甘肃兰州 730050;兰州理工大学机电工程学院,甘肃兰州 730050;青海一机数控机床有限责任公司,青海西宁 810018;兰州理工大学机电工程学院,甘肃兰州 730050【正文语种】中文【中图分类】TH161随着高速、高精密机床的发展,在机械加工过程中,高速主轴的回转误差已经成为影响工件加工精度的关键因素,它直接影响到被加工零件的几何形状精度和表面粗糙度[1]。
主轴动态回转精度测试介绍

主轴动态回转精度测试介绍一、前言数控机床主轴组件的精度包含以下两个方面:1.几何精度-主轴组件的几何精度,是指装配后,在无负载低速转动(用手转动或低速机械转速)的条件下,主轴轴线和主轴前端安装工件或刀具部位的径向和轴向跳动,以及主轴对某参考系统(如刀架或工作台的纵、横移动方向)的位置精度,如平行度和垂直度等;2.回转精度-指的是主轴在以正常工作转速做回转运动时,轴线位置的变化。
二、主轴回转精度的定义主轴在作转动运动时,在同一瞬间,主轴上线速度为零的点的联机,称为主轴在该瞬间的回转中心线,在理想状况下,主轴在每一瞬间的回转中心线的空间位置,相对于某一固定的参考系统(例如:刀架、主轴箱体或数控机床的工作台面)来说,应该是固定不变的。
但实际上,由于主轴的轴颈支承在轴承上,轴承又安装在主轴箱体孔内,主轴上还有齿轮或其它传动件,由于轴颈的不圆、轴承的缺陷、支承端面对轴颈中心线的不垂直,主轴的挠曲和数控机床结构的共振等原因,主轴回转中心线的空间位置,在每一瞬时都是变动的。
把回转主轴的这些瞬间回转中心线的平均空间位置定义为主轴的理想回转中心线,而且与固定的参考坐标系统联系在一起。
这样,主轴瞬间回转中心线的空间位置相对于理想中心线的空间位置的偏离就是回转主轴在该瞬间的误差运动。
这些瞬间误差运动的轨迹,就是回转主轴误差运动的轨迹。
主轴误差运动的范围,就是所谓的「主轴回转精度」。
由此可见,主轴的回转精度,说明回转主轴中心线空间位置的稳定性特点。
三、主轴回转精度量测3.1 主轴回转误差运动的测量与研究目的对主轴回转误差运动的测量和研究有两方面的目的:(1).从设计、制造的角度出发,希望通过测量研究找出设计、制造因素与主轴误差运动的关系,及如何根据误差运动的特点,评定主轴系统的设计和制造质量,同时找出产生误差运动的主要原因,以便做进一步改善。
(2).从使用的角度出发,希望找出主轴运动与加工精度和表面粗糙度的关系,及如何根据误差运动的特点,预测出数控机床在理想条件下所能加工出的工件几何与表面粗糙度,给选用数控机床及设计数控机床提出依据。
超精密空气主轴回转精度的测量与数据处理

超精密空气主轴回转精度的测量与数据处理我所研制的超精密空气主轴(以下简称主轴)可用作超精密加工机床或高精度计量仪器的主轴系统。
主轴采用先进的气体静压技术,径向轴承和双向止推轴承的各工作面均为静压气浮面,且经过严格的动平衡,因而实现了非接触的高精度回转,具有无振动、低噪音的特点。
由于气膜对轴系零件加工误差的平均作用,因而轴系装配后的回转精度可以高于零件精度。
对主轴主要技术指标——主轴径向回转精度要求达到小于0.1μm。
这样高精度的指标,即使加工出来了,也难以测量出它的精度,因而给测量带来了极大的困难。
通过几年的摸索、研究,终于用双向转位法测出了主轴径向回转精度(0.07μm)。
现将测量方法介绍给读者。
1 检测1.1 检测条件环境温度:20±1℃每小时变化:<0.1℃相对湿度:30%~60%被测主轴在恒温室内定温时间不少于24h;被测主轴与标准器具的温差不大于0.2℃;被测主轴需安置在隔振基础上,周围无剧烈振动和冲击;供气压力稳定在0.4±0.02MPaq1.2 检测用仪器和器具① TESA电感测微仪(瑞士)(分辨率0.01μm),②标准玻璃球不圆度≤0.05μm(英国圆度仪附件)1.3 检测方法采用双向测量法,测量装置如图1所示。
图1 测量装置将标准玻璃球作为测量工具,通过可调偏心并能转位工装,固定安装在主轴上。
电感测微仪测头从主轴回转轴线垂直方向对准球,并垂直于球面,调整球与轴系回转轴线基本同心。
其偏心量越小越好,一般在0.5μm左右。
第一步,测头从零度方向开始测量,均匀旋转主轴,从零开始每间隔10°,θi=0°,10°,20°~350°。
读出电感测微仪读数,测量3~5圈,取平均值X1(θi)为反向前读数,然后轴系不动,球与测头各自相对于轴系转动180°,即进行了反向,反向后球的偏心会有变化,重新调整偏心后测量3~5圈,取平均值为反向后读数X2(θi)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主轴动态回转精度测试介绍
一、前言
数控机床主轴组件的精度包含以下两个方面:1.几何精度-主轴组件的几何精度,是指装配后,在无负载低速转动(用手转动或低速机械转速)的条件下,主轴轴线和主轴前端安装工件或刀具部位的径向和轴向跳动,以及主轴对某参考系统(如刀架或工作台的纵、横移动方向)的位置精度,如平行度和垂直度等;2.回转精度-指的是主轴在以正常工作转速做回转运动时,轴线位置的变化。
二、主轴回转精度的定义
主轴在作转动运动时,在同一瞬间,主轴上线速度为零的点的联机,称为主轴在该瞬间的回转中心线,在理想状况下,主轴在每一瞬间的回转中心线的空间位置,相对于某一固定的参考系统(例如:刀架、主轴箱体或数控机床的工作台面)来说,应该是固定不变的。
但实际上,由于主轴的轴颈支承在轴承上,轴承又安装在主轴箱体孔内,主轴上还有齿轮或其它传动件,由于轴颈的不圆、轴承的缺陷、支承端面对轴颈中心线的不垂直,主轴的挠曲和数控机床结构的共振等原因,主轴回转中心线的空间位置,在每一瞬时都是变动的。
把回转主轴的这些瞬间回转中心线的平均空间位置定义为主轴的理想回转中心线,而且与固定的参考坐标系统联系在一起。
这样,主轴瞬间回转中心线的空间位置相对于理想中心线的空间位置的偏离就是回转主轴在该瞬间的误差运动。
这些瞬间误差运动的轨迹,就是回转主轴误差运动的轨迹。
主轴误差运动的范围,就是所谓的「主轴回转精度」。
由此可见,主轴的回转精度,说明回转主轴中心线空间位置的稳定性特点。
三、主轴回转精度量测
3.1 主轴回转误差运动的测量与研究目的
对主轴回转误差运动的测量和研究有两方面的目的:
(1).从设计、制造的角度出发,希望通过测量研究找出设计、制造因素与主轴误差运动的关系,及如何根据误差运动的特点,评定主轴系统的设计和制造质量,同时找出产生误差运动的主要原因,以便做进一步改善。
(2).从使用的角度出发,希望找出主轴运动与加工精度和表面粗糙度的关系,及如何根据误差运动的特点,预测出数控机床在理想条件下所能加工出的工件几何与表面粗糙度,给选用数控机床及设计数控机床提出依据。
3.2 主轴回转精度之测试方法
主轴回转精度之测量方法,有直接测量法与间接测量法(试件法)两大类,其中直接测量法又有静态与动态测量两种方式。
(1).静态测试法-
在主轴锥孔中插入精密之测试棒,用量表接触试棒的表面和端面,轻轻旋转主轴量测在不同角度上的读值。
优点:测量方法简单,容易操作,能检验出主轴锥孔中心线与回转中心线是否同心;缺点:不能反映主轴在实际工作转速下的误差运动,且不能反映该误差运动可能造成的加工形状误差及对表面粗糙度的影响。
(2).动态测试法-
以标准试棒偏心安装,在径向固定两互相垂直的位移传感器,再轴向另安装一垂直方向的位移传感器,其信号经放大器输入示波器,测量旋转敏感方向的主轴误差运动。
3.3 运动误差图名词解释
(1).总误差运动(Total Error Motion)-以足够多的圈数记录下的全部误差极坐标图,它代表主轴在一定转速下的误差运动情形。
(2).平均误差运动(Average Error Motion)-是总误差运动极坐标图的平均轮廓线,代表该机台在理想切削条件下所能加工出零件的最好圆度。
(3).随机误差运动(Asynchronous Error Motion)-是总误差运动对平均误差运动的偏离,它表示在理想切削条件下所能获得的加工表面粗糙度。
(4).基本误差(Fundamental Error)-平均误差运动的最密切圆,代表主轴轴心线每转一次的轴向误差。
(5).残余误差(Residual Error)-平均误差运动对基本误差图像的偏离,代表端面加工的平面度。
3.4 主轴动态回转精度分析
A .造成径向运动误差(Radial Error Motion)的原因:
有两个主要的原因造成数控机床上之主轴回转精度误差:
1.轴承(Bearings),包含轴承不对心(bearing alignment)。
2.机台结构变形造成主轴与量测点间的动态位移(Structural motion between
where the probe is mounted and the spindle.)。
B .造成径向平均误差(Average Error)的原因:
1. 轴承内(外)环轨道不圆(Out of round stationary bearing races)。
2. 轴承座不圆(Out of round bearing seats)。
3. 轴承座不对心(Misaligned bearing seats)。
4. 主轴动不平衡偶合结构刚性不均匀(Out of Balance condition coupled with
non-uniform),(I.e. a structure that is weak in one direction)。
5. 机台结构与主轴转速共振(Resonant conditions of the machine structure that
are synchronized with the rotational speed)。
C .造成径向异步误差(Asynchronous Error)的原因:
1. 轴承预压不当(Improper preload )。
2. 轴承缺陷(Bearing defects)例如:
•滚珠或滚柱尺寸有差异或缺陷(Size variation or defects in rolling elements.)。
•滚珠或滚柱与轨道面的摩擦(Defects such as galling of rotating race)。
•保持器磨损变形或组装不良。
(Bearing cages –worn or installed improperly )
3. 机台结构变形造成相对振动(Structural Motion / relative vibration)。
4. 由机台外部振动源造成的结构振动变形(Conducted vibration from the floor
that caused motion between the probe and master target.)。
5. 机台内部振动源(Self excited motion)引起的:
•液压系统(Hydraulic system)
•冷却系统(Coolant system)
•齿轮、皮带及皮带轮(Gears, belts, pulleys)
•润滑系统(Lubrication systems)
6. 机械结构或主轴之共振(Resonant frequencies of the machine elements
including the spindle that are not synchronized to the rotational speed.)。
四、主轴回转精度实际测试范例
ØVICTOR 车床主轴回转精度测试架设范例
ØVCENTER 综合加工机主轴回转精度测试架设范例
Ø主轴回转精度实验所量测结果范例说明
轉速vs.同步與非同步誤差
五、结论
采用此一精密量测技术有下列各项优点:
1. 主轴动态回转精度量测能够评估主轴之运转特性,藉由此一量测可以得知主
轴组装情形,再决定是否需要重新组装。
2. 藉由此一量测,可以得知主轴的较佳运转转速而得到较理想的工件,而无须
由实际切削结果反推理想运转速度。
3. 当转速接近共振频率时,主轴之回转误差会急遽增加,由此一量测亦可测得
其共振频率。
4. 在单点搪孔作业中,平均误差运动与加工完成的孔之真圆度有直接相关;随
机误差运动加工完成的孔之表面粗糙度亦有直接关连,若主轴有较小的随机误差运动,便能够加工出较佳之表面粗糙度。