数字图像处理(MATLAB版)
用matlab实现数字图像处理几个简单例子
实验报告实验一图像的傅里叶变换(旋转性质)实验二图像的代数运算实验三filter2实现均值滤波实验四图像的缩放朱锦璐04085122实验一图像的傅里叶变换(旋转性质)一、实验内容对图(1.1)的图像做旋转,观察原图的傅里叶频谱和旋转后的傅里叶频谱的对应关系。
图(1.1)二、实验原理首先借助极坐标变换x=rcosθ,y=rsinθ,u=wcosϕ,v=wsinϕ,,将f(x,y)和F(u,v)转换为f(r,θ)和F(w,ϕ).f(x,y) <=> F(u,v)f(rcosθ,rsinθ)<=> F(wcosϕ,wsinϕ)经过变换得f( r,θ+θ。
)<=>F(w,ϕ+θ。
)上式表明,对f(x,y)旋转一个角度θ。
对应于将其傅里叶变换F(u,v)也旋转相同的角度θ。
F(u,v)到f(x,y)也是一样。
三、实验方法及程序选取一幅图像,进行离散傅里叶变换,在对其进行一定角度的旋转,进行离散傅里叶变换。
>> I=zeros(256,256); %构造原始图像I(88:168,120:136)=1; %图像范围256*256,前一值是纵向比,后一值是横向比figure(1);imshow(I); %求原始图像的傅里叶频谱J=fft2(I);F=abs(J);J1=fftshift(F);figure(2)imshow(J1,[5 50])J=imrotate(I,45,'bilinear','crop'); %将图像逆时针旋转45°figure(3);imshow(J) %求旋转后的图像的傅里叶频谱J1=fft2(J);F=abs(J1);J2=fftshift(F);figure(4)imshow(J2,[5 50])四、实验结果与分析实验结果如下图所示(1.2)原图像(1.3)傅里叶频谱(1.4)旋转45°后的图像(1.5)旋转后的傅里叶频谱以下为放大的图(1.6)原图像(1.7)傅里叶频谱(1.8)旋转45°后的图像(1.9)旋转后的傅里叶频谱由实验结果可知1、从旋转性质来考虑,图(1.8)是图(1.6)逆时针旋转45°后的图像,对比图(1.7)和图(1.9)可知,频域图像也逆时针旋转了45°2、从尺寸变换性质来考虑,如图(1.6)和图(1.7)、图(1.8)和图(1.9)可知,原图像和其傅里叶变换后的图像角度相差90°,由此可知,时域中的信号被压缩,到频域中的信号就被拉伸。
数字图像处理与应用(MATLAB版)课后题答案

第一章1. 什么是图像?如何区分数字图像和模拟图像?模拟图像和数字图像如何相互转换?答:图像是当光辐射能量照在物体上,经过反射或透射,或由发光物体本身发出的光能量,在人的视觉器官中所重现出的物体的视觉信息。
数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像(连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
2. 什么是数字图像处理?答:数字图像处理(Digital Image Processing)是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。
3. 数字图像处理系统有哪几部分组成?各部分的主要功能和常见设备有哪些?答:一个基本的数字图像处理系统由图像输入、图像存储、图像输出、图像通信、图像处理和分析5个模块组成,如下图所示。
各个模块的作用分别为:图像输入模块:图像输入也称图像采集或图像数字化,它是利用图像采集设备(如数码照相机、数码摄像机等)来获取数字图像,或通过数字化设备(如图像扫描仪)将要处理的连续图像转换成适于计算机处理的数字图像。
图像存储模块:主要用来存储图像信息。
图像输出模块:将处理前后的图像显示出来或将处理结果永久保存。
图像通信模块:对图像信息进行传输或通信。
图像处理与分析模块:数字图像处理与分析模块包括处理算法、实现软件和数字计算机,以完成图像信息处理的所有功能。
4. 试述人眼的主要特性。
答:(1)、人眼的视觉机理。
视网膜上有大量的杆状细胞和锥状细胞,锥状细胞能辨别光的颜色,而杆状细胞感光灵敏度高,但不能辨色。
(2)、人眼的视敏特性。
指人眼对不同波长的光具有不同的敏感程度。
(3)、人眼的亮度感觉。
亮度感觉范围指人眼所能感觉到的最大亮度与最小亮度之间的范围。
数字图像处理及matlab实现源代码【1】
% *-*--*-*-*-*-*-*-*-*-*-*-*图像处理*-*-*-*-*-*-*-*-*-*-*-*%{% (一)图像文件的读/写A=imread('drum.jpg'); % 读入图像imshow(A); % 显示图像imwrite(A,'drum.jpg');info=imfinfo('drum.jpg') % 查询图像文件信息% 用colorbar函数将颜色条添加到坐标轴对象中RGB=imread('drum.jpg');I=rgb2gray(RGB); % 把RGB图像转换成灰度图像h=[1 2 1;0 0 0;-1 -2 -1];I2=filter2(h,I);imshow(I2,[]);colorbar('vert') % 将颜色条添加到坐标轴对象中% wrap函数将图像作为纹理进行映射A=imread('4.jpg');imshow(A);I=rgb2gray(RGB);[x,y,z]=sphere;warp(x,y,z,I); % 用warp函数将图像作为纹理进行映射%}% subimage函数实现一个图形窗口中显示多幅图像RGB=imread('drum.jpg');I=rgb2gray(RGB);subplot(1,2,1);subimage(RGB); % subimage函数实现一个图形窗口中显示多幅图像subplot(1,2,2),subimage(I);% *-*--*-*-*-*-*-*-*-*-*-*-*图像处理*-*-*-*-*-*-*-*-*-*-*-*% (二)图像处理的基本操作% ----------------图像代数运算------------------%{% imadd函数实现两幅图像的相加或给一幅图像加上一个常数% 给图像每个像素都增加亮度I=imread('4.jpg');J=imadd(I,100); % 给图像增加亮度subplot(1,2,1),imshow(I);title('原图');subplot(1,2,2),imshow(J);title('增加亮度图');%% imsubtract函数实现将一幅图像从另一个图像中减去或减去一个常数I=imread('drum.jpg');J=imsubtract(I,100); % 给图像减去亮度subplot(1,2,1),imshow(I);%% immultiply实现两幅图像的相乘或者一幅图像的亮度缩放I=imread('drum.jpg');J=immultiply(I,2); % 进行亮度缩放subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(J);%% imdivide函数实现两幅图像的除法或一幅图像的亮度缩放I=imread('4.jpg');J=imdivide(I,0.5); % 图像的亮度缩放subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(J);%}% ----------------图像的空间域操作------------------%{% imresize函数实现图像的缩放J=imread('4.jpg');subplot(1,2,1),imshow(J);title('原图');X1=imresize(J,0.2); % 对图像进行缩放subplot(1,2,2),imshow(X1);title('缩放图');%% imrotate函数实现图像的旋转I=imread('drum.jpg');J=imrotate(I,50,'bilinear'); % 对图像进行旋转subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(J);%% imcrop函数实现图像的剪切I=imread('drum.jpg');I2=imcrop(I,[1 100 130 112]); % 对图像进行剪切subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(I2);%}% ----------------特定区域处理------------------%{% roipoly函数用于选择图像中的多边形区域I=imread('4.jpg');c=[200 250 278 248 199 172];r=[21 21 75 121 121 75];BW=roipoly(I,c,r); % roipoly函数选择图像中的多边形区域subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(BW);%% roicolor函数式对RGB图像和灰度图像实现按灰度或亮度值选择区域进行处理a=imread('4.jpg');subplot(2,2,1),imshow(a);I=rgb2gray(a);BW=roicolor(I,128,225); % 按灰度值选择的区域subplot(2,2,4),imshow(BW);%% ploy2mask 函数转化指定的多边形区域为二值掩模x=[63 186 54 190 63];y=[60 60 209 204 601];bw=poly2mask(x,y,256,256); % 转化指定的多边形区域为二值掩模imshow(bw);hold onplot(x,y,'r','LineWidth',2);hold off%% roifilt2函数实现区域滤波a=imread('4.jpg');I=rgb2gray(a);c=[200 250 278 248 199 172];r=[21 21 75 121 121 75];BW=roipoly(I,c,r); % roipoly函数选择图像中的多边形区域h=fspecial('unsharp');J=roifilt2(h,I,BW); % 区域滤波subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(J);%% roifill函数实现对特定区域进行填充a=imread('4.jpg');I=rgb2gray(a);c=[200 250 278 248 199 172];r=[21 21 75 121 121 75];J=roifill(I,c,r); % 对特定区域进行填充subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(J);%}% ----------------图像变换------------------%{% fft2 和ifft2函数分别是计算二维的快速傅里叶变换和反变换f=zeros(100,100);subplot(1,2,1);imshow(f);f(20:70,40:60)=1;subplot(1,2,2);imshow(f);F=fft2(f); % 计算二维的快速傅里叶变换F2=log(abs(F));% 对幅值对对数figure;subplot(1,2,1),imshow(F),colorbar;subplot(1,2,2),imshow(F2),colorbar;%% fftsshift 函数实现了补零操作和改变图像显示象限f=zeros(100,100);subplot(2,2,1),imshow(f);title('f')f(10:70,40:60)=1;subplot(2,2,2),imshow(f);title('f取后')F=fft2(f,256,256);subplot(2,2,3),imshow(F);title('F')F2=fftshift(F); % 实现补零操作subplot(2,2,4),imshow(F2);title('F2')figure,imshow(log(abs(F2)));title('log(|F2|)')%% dct2 函数采用基于快速傅里叶变换的算法,用于实现较大输入矩阵的离散余弦变换% idct2 函数实现图像的二维逆离散余弦变换RGB=imread('drum.jpg');I=rgb2gray(RGB);J=dct2(I); % 对I进行离散余弦变换imshow(log(abs(J))),title('对原图离散后取对数'),colorbar;J(abs(J)<10)=0;K=idct2(J); % 图像的二维逆离散余弦变换figure,imshow(I),title('原灰度图')figure,imshow(K,[0,255]);title('逆离散变换');%% dctmtx 函数用于实现较小输入矩阵的离散余弦变figure;RGB=imread('4.jpg');I=rgb2gray(RGB);subplot(3,2,1),imshow(I),title('原灰度图');I=im2double(I);subplot(3,2,2),imshow(I),title('取双精度后');T=dctmtx(8); % 离散余弦变换subplot(3,2,3),imshow(I),title('离散余弦变换后');B=blkproc(I,[8,8],'P1*x*P2',T,T');subplot(3,2,4),imshow(B),title('blkproc作用I后的B');mask=[ 1 1 1 1 0 0 0 01 1 1 0 0 0 0 01 1 0 0 0 0 0 01 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 00 0 0 0 0 0 0 0 ];B2=blkproc(B,[8,8],'P1.*x',mask);subplot(3,2,5),imshow(B2),title('blkproc作用B后的B2');I2=blkproc(B2,[8,8],'P1*x*P2',T',T);subplot(3,2,6),imshow(I2),title('blkproc作用B2后的I2');%% edge函数用于提取图像的边缘RGB=imread('4.jpg');I=rgb2gray(RGB);BW=edge(I);imshow(I);figure,imshow(BW);%% radon 函数用来计算指定方向上图像矩阵的投影RGB=imread('4.jpg');I=rgb2gray(RGB);BW=edge(I);theta=0:179;[R,XP]=radon(BW,theta); % 图像矩阵的投影figure,imagesc(theta,XP,R);colormap(hot);xlabel('\theta(degrees)');ylabel('x\prime');title('R_{\theta}(x\prime)');colorbar;%}% ----------------图像增强、分割和编码------------------%{% imhist 函数产生图像的直方图A=imread('4.jpg');B=rgb2gray(A);subplot(2,1,1),imshow(B);subplot(2,1,2),imhist(B);%% histeq 函数用于对图像的直方图均衡化A=imread('4.jpg');B=rgb2gray(A);subplot(2,1,1),imshow(B);subplot(2,1,2),imhist(B);C=histeq(B); % 对图像B进行均衡化figure;subplot(2,1,1),imshow(C);subplot(2,1,2),imhist(C);%% filter2 函数实现均值滤波a=imread('4.jpg');I=rgb2gray(a);subplot(2,2,1),imshow(I);K1=filter2(fspecial('average',3),I)/255; % 3*3的均值滤波K2=filter2(fspecial('average',5),I)/255; % 5*5的均值滤波K3=filter2(fspecial('average',7),I)/255; % 7*7的均值滤波subplot(2,2,2),imshow(K1);subplot(2,2,3),imshow(K2);subplot(2,2,4),imshow(K3);%% wiener2 函数实现Wiener(维纳)滤波a=imread('4.jpg');I=rgb2gray(a);subplot(2,2,1),imshow(I);K1=wiener2(I,[3,3]); % 3*3 wiener滤波K2=wiener2(I,[5,5]); % 5*5 wiener滤波K3=wiener2(I,[7,7]); % 7*7 wiener滤波subplot(2,2,2),imshow(K1);subplot(2,2,3),imshow(K2);subplot(2,2,4),imshow(K3);%% medfilt2 函数实现中值滤波a=imread('4.jpg');I=rgb2gray(a);subplot(2,2,1),imshow(I);K1=medfilt2(I,[3,3]); % 3*3 中值滤波K2=medfilt2(I,[5,5]); % 5*5 中值滤波K3=medfilt2(I,[7,7]); % 7*7 中值滤波subplot(2,2,2),imshow(K1);subplot(2,2,3),imshow(K2);subplot(2,2,4),imshow(K3);%}% ----------------图像模糊及复原------------------%{% deconvwnr 函数:使用维纳滤波器I=imread('qier.jpg');imshow(I);% 对图像进行模糊处理LEN=31;THETA=11;PSF1=fspecial('motion',LEN,THETA); % 运动模糊PSF2=fspecial('gaussian',10,5); % 高斯模糊Blurred1=imfilter(I,PSF1,'circular','conv'); % 得到运动模糊图像Blurred2=imfilter(I,PSF2,'conv'); % 得到高斯噪声模糊图像figure;subplot(1,2,1);imshow(Blurred1);title('Blurred1--"motion"'); subplot(1,2,2);imshow(Blurred2);title('Blurred2--"gaussian"');% 对模糊图像加噪声V=0.002;BlurredNoisy1=imnoise(Blurred1,'gaussian',0,V); % 加高斯噪声BlurredNoisy2=imnoise(Blurred2,'gaussian',0,V); % 加高斯噪声figure;subplot(1,2,1);imshow(BlurredNoisy1);title('BlurredNoisy1'); subplot(1,2,2);imshow(BlurredNoisy2);title('BlurredNoisy2');% 进行维纳滤波wnr1=deconvwnr(Blurred1,PSF1); % 维纳滤波wnr2=deconvwnr(Blurred2,PSF2); % 维纳滤波figure;subplot(1,2,1);imshow(wnr1);title('Restored1,True PSF'); subplot(1,2,2);imshow(wnr2);title('Restored2,True PSF');%% deconvreg函数:使用约束最小二乘滤波器I=imread('qier.jpg');imshow(I);% 对图像进行模糊处理LEN=31;THETA=11;PSF1=fspecial('motion',LEN,THETA); % 运动模糊PSF2=fspecial('gaussian',10,5); % 高斯模糊Blurred1=imfilter(I,PSF1,'circular','conv'); % 得到运动模糊图像Blurred2=imfilter(I,PSF2,'conv'); % 得到高斯噪声模糊图像figure;subplot(1,2,1);imshow(Blurred1);title('Blurred1--"motion"');subplot(1,2,2);imshow(Blurred2);title('Blurred2--"gaussian"');% 对模糊图像加噪声V=0.002;BlurredNoisy1=imnoise(Blurred1,'gaussian',0,V); % 加高斯噪声BlurredNoisy2=imnoise(Blurred2,'gaussian',0,V); % 加高斯噪声figure;subplot(1,2,1);imshow(BlurredNoisy1);title('BlurredNoisy1');subplot(1,2,2);imshow(BlurredNoisy2);title('BlurredNoisy2');NP=V*prod(size(I));reg1=deconvreg(BlurredNoisy1,PSF1,NP); % 约束最小二乘滤波reg2=deconvreg(BlurredNoisy2,PSF2,NP); % 约束最小二乘滤波figure;subplot(1,2,1);imshow(reg1);title('Restored1 with NP');subplot(1,2,2);imshow(reg2);title('Restored2 with NP');%% deconvlucy函数:使用Lucy-Richardson滤波器I=imread('qier.jpg');imshow(I);% 对图像进行模糊处理LEN=31;THETA=11;PSF1=fspecial('motion',LEN,THETA); % 运动模糊PSF2=fspecial('gaussian',10,5); % 高斯模糊Blurred1=imfilter(I,PSF1,'circular','conv'); % 得到运动模糊图像Blurred2=imfilter(I,PSF2,'conv'); % 得到高斯噪声模糊图像figure;subplot(1,2,1);imshow(Blurred1);title('Blurred1--"motion"');subplot(1,2,2);imshow(Blurred2);title('Blurred2--"gaussian"');% 对模糊图像加噪声V=0.002;BlurredNoisy1=imnoise(Blurred1,'gaussian',0,V); % 加高斯噪声BlurredNoisy2=imnoise(Blurred2,'gaussian',0,V); % 加高斯噪声figure;subplot(1,2,1);imshow(BlurredNoisy1);title('BlurredNoisy1');subplot(1,2,2);imshow(BlurredNoisy2);title('BlurredNoisy2');luc1=deconvlucy(BlurredNoisy1,PSF1,5); % 使用Lucy-Richardson滤波luc2=deconvlucy(BlurredNoisy1,PSF1,15); % 使用Lucy-Richardson滤波figure;subplot(1,2,1);imshow(luc1);title('Restored Image,NUMIT=5'); subplot(1,2,2);imshow(luc2);title('Restored Image,NUMIT=15');%}% deconvblind 函数:使用盲卷积算法a=imread('4.jpg');I=rgb2gray(a);figure;imshow(I);title('Original Image');PSF=fspecial('motion',13,45); % 运动模糊figure;imshow(PSF);Blurred=imfilter(I,PSF,'circ','conv'); % 得到运动模糊图像figure;imshow(Blurred);title('Blurred Image');INITPSF=ones(size(PSF));[J,P]=deconvblind(Blurred,INITPSF,30); % 使用盲卷积figure;imshow(J);figure;imshow(P,[],'notruesize');% *-*--*-*-*-*-*-*-*-*-*-*-*图像处理*-*-*-*-*-*-*-*-*-*-*-* %{% 对图像进行减采样a=imread('lena.jpg');%subplot(1,4,1);figure;imshow(a);title('原图');b=rgb2gray(a);%subplot(1,4,2);figure;imshow(b);title('原图的灰度图');[wid,hei]=size(b);%---4倍减采样----quartimg=zeros(wid/2+1,hei/2+1);i1=1;j1=1;for i=1:2:widfor j=1:2:heiquartimg(i1,j1)=b(i,j);j1=j1+1;endi1=i1+1;j1=1;end%subplot(1,4,3);figure;imshow(uint8(quartimg));title('4倍减采样')% ---16倍减采样---quanrtimg=zeros(wid/4+1,hei/4+1);i1=1;j1=1;for i=1:4:widfor j=1:4:heiquanrtimg(i1,j1)=b(i,j);j1=j1+1;endi1=i1+1;j1=1;end%subplot(1,4,4);.figure;imshow(uint8(quanrtimg));title('16倍减采样');%}% 图像类型% 将图像转换为256级灰度图像,64级灰度图像,32级灰度图像,8级灰度图像,2级灰度图像a=imread('4.jpg');%figure;subplot(2,3,1);imshow(a);title('原图');b=rgb2gray(a); % 这是256灰度级的图像%figure;subplot(2,3,2);imshow(b);title('原图的灰度图像');[wid,hei]=size(b);img64=zeros(wid,hei);img32=zeros(wid,hei);img8=zeros(wid,hei);img2=zeros(wid,hei);for i=1:widfor j=j:heiimg64(i,j)=floor(b(i,j)/4); % 转化为64灰度级endend%figure;subplot(2,3,3);imshow(uint8(img64),[0,63]);title('64级灰度图像');for i=1:widfor j=1:heiimg32(i,j)=floor(b(i,j)/8);% 转化为32灰度级endend%figure;subplot(2,3,4);imshow(uint8(img32),[0,31]);title('32级灰度图像');for i=1:widfor j=1:heiimg8(i,j)=floor(b(i,j)/32);% 转化为8灰度级endend%figure;subplot(2,3,5);imshow(uint8(img8),[0,7]);title('8级灰度图像');for i=1:widfor j=1:heiimg2(i,j)=floor(b(i,j)/128);% 转化为2灰度级endend%figure;subplot(2,3,6);imshow(uint8(img2),[0,1]);title('2级灰度图像');% *-*--*-*-*-*-*-*-*-*-*-*-*图像处理*-*-*-*-*-*-*-*-*-*-*-* %{% ------------------ 图像的点运算------------------I=imread('lena.jpg');figure;subplot(1,3,1);imshow(I);title('原图的灰度图');J=imadjust(I,[0.3;0.6],[0.1;0.9]); % 设置灰度变换的范围subplot(1,3,2);imshow(J);title('线性扩展');I1=double(I); % 将图像转换为double类型I2=I1/255; % 归一化此图像C=2; % 非线性扩展函数的参数K=C*log(1+I2); % 对图像的对数变换subplot(1,3,3);imshow(K);title('非线性扩展');M=255-I;figure;subplot(1,3,1);imshow(M);title('灰度倒置');N1=im2bw(I,0.4); % 将此图像二值化,阈值为0.4N2=im2bw(I,0.7); % 将此图像二值化,阈值为0.7 subplot(1,3,2);imshow(N1);title('二值化阈值0.4');subplot(1,3,3);imshow(N2);title('二值化阈值0.7');%}%{% ------------------ 图像的代数运算------------------% 将两幅图像进行加法运算I=imread('lena.jpg');I=rgb2gray(I);J=imread('rice.png');% 以下把两幅图转化为大小一样for i=1:size(I)for j=size(J):size(I)J(i,j)=0;endendI=im2double(I); % 将图像转化为double型J=im2double(J);% imshow(I);figure;imshow(J);K=I+0.3*J; % 将两幅图像相加subplot(1,3,1);imshow(I);title('人物图');subplot(1,3,2);imshow(J);title('背景图');subplot(1,3,3);imshow(K);title('相加后的图');imwrite(K,'i_lena1.jpg');%%% 将两幅图像做减运算,分离背景与原图A=imread('i_lena1.jpg');B=imread('rice.png');% 以下把两幅图转化为大小一样for i=1:size(A)for j=size(B):size(A)B(i,j)=0;endendC=A-0.3*B;a=imread('lena.jpg');subplot(2,2,1);imshow(a);title('原图图');subplot(2,2,2);imshow(A);title('混合图');subplot(2,2,3);imshow(B);title('背景图');subplot(2,2,4);imshow(C);title('分离后的图');%% 设置掩模,需要保留下来的区域,掩模图像的值为1,否则为0 A=imread('drum.jpg');A=rgb2gray(A);A=im2double(A);sizeA=size(A);subplot(1,2,1);imshow(A);title('原图');B=zeros(sizeA(1),sizeA(2)); % 设置模板B(100:400,100:500)=1;K=A.*B; % 两幅图像相乘subplot(1,2,2);imshow(K);title('局部图');%}%{% ------------------ 图像的缩放------------------A=imread('drum.jpg');B1=imresize(A,1.5); % 比例放大1.5杯,默认采用的是最近邻法进行线性插值B2=imresize(A,[420 384]); % 非比例放大到420:384C1=imresize(A,0.7); % 比例缩小0.7倍C2=imresize(A,[150 180]); % 非比例缩小到150:180figure;imshow(B1);title('比例放大图');figure;imshow(B2);title('非比例放大图');figure;imshow(C1);title('比例缩小图');figure;imshow(C2);title('非比例缩小图');% 检测非比例缩放得到的图片是否能还原到原图a=size(A)d=imresize(C2,[a(1),a(2)]);figure;imshow(d);%}% ------------------ 图像的旋转------------------I=imread('drum.jpg');J=imrotate(I,45); % 图像进行逆时针旋转,默认采用最近邻插值法进行插值处理K=imrotate(I,90); % 默认旋转出界的部分不被截出subplot(1,3,1);imshow(I);subplot(1,3,2);imshow(J);subplot(1,3,3);imshow(K);% 检测旋转后的图像是否失真P=imrotate(K,270);figure;imshow(P);。
matlab数字图像处理实验报告
《数字图像处理实验报告》实验一图像的增强一.实验目的1.熟悉图像在MATLAB下的读写、输出;2.熟悉直方图;3.熟悉图像的线性指数等;4.熟悉图像的算术运算和几何变换。
二.实验仪器计算机、MATLAB软件三.实验原理图像增强是指根据特定的需要突出图像中的重要信息,同时减弱或去除不需要的信息。
从不同的途径获取的图像,通过进行适当的增强处理,可以将原本模糊不清甚至根本无法分辨的原始图像处理成清晰的富含大量有用信息的可使用图像。
其基本原理是:对一幅图像的灰度直方图,经过一定的变换之后,使其成为均匀或基本均匀的,即使得分布在每一个灰度等级上的像素个数.f=H等或基本相等。
此方法是典刑的图像空间域技术处理,但是由于灰度直方图只是近似的概率密度函数,因此,当用离散的灰度等级做变换时,很难得到完全平坦均匀的结果。
频率域增强技术频率域增强是首先将图像从空间与变换到频域,然后进行各种各样的处理,再将所得到的结果进行反变换,从而达到图像处理的目的。
常用的变换方法有傅里叶变换、DCT变换、沃尔什-哈达玛变换、小波变换等。
假定原图像为f(x,y),经傅立叶变换为F(u,v)。
频率域增强就是选择合适的滤波器H(u,v)对F(u,v)的频谱成分进行处理,然后经逆傅立叶变换得到增强的图像。
四.实验内容及步骤1.图像在MATLAB下的读写、输出;实验过程:>> I = imread('F:\image\');figure;imshow(I);title('Original Image');text(size(I,2),size(I,1)+15, ...'', ...'FontSize',7,'HorizontalAlignment','right');Warning: Image is too big to fit on screen; displaying at 25% > In imuitools\private\initSize at 86In imshow at 1962.给定函数的累积直方图。
(完整版)数字图像处理MATLAB程序【完整版】
第一部分数字图像处理实验一图像的点运算实验1.1 直方图一.实验目的1.熟悉matlab图像处理工具箱及直方图函数的使用;2.理解和掌握直方图原理和方法;二.实验设备1.PC机一台;2.软件matlab。
三.程序设计在matlab环境中,程序首先读取图像,然后调用直方图函数,设置相关参数,再输出处理后的图像。
I=imread('cameraman.tif');%读取图像subplot(1,2,1),imshow(I) %输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题四.实验步骤1. 启动matlab双击桌面matlab图标启动matlab环境;2. 在matlab命令窗口中输入相应程序。
书写程序时,首先读取图像,一般调用matlab自带的图像,如:cameraman图像;再调用相应的直方图函数,设置参数;最后输出处理后的图像;3.浏览源程序并理解含义;4.运行,观察显示结果;5.结束运行,退出;五.实验结果观察图像matlab环境下的直方图分布。
(a)原始图像 (b)原始图像直方图六.实验报告要求1、给出实验原理过程及实现代码;2、输入一幅灰度图像,给出其灰度直方图结果,并进行灰度直方图分布原理分析。
实验1.2 灰度均衡一.实验目的1.熟悉matlab图像处理工具箱中灰度均衡函数的使用;2.理解和掌握灰度均衡原理和实现方法;二.实验设备1.PC机一台;2.软件matlab;三.程序设计在matlab环境中,程序首先读取图像,然后调用灰度均衡函数,设置相关参数,再输出处理后的图像。
I=imread('cameraman.tif');%读取图像subplot(2,2,1),imshow(I) %输出图像title('原始图像') %在原始图像中加标题subplot(2,2,3),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题a=histeq(I,256); %直方图均衡化,灰度级为256subplot(2,2,2),imshow(a) %输出均衡化后图像title('均衡化后图像') %在均衡化后图像中加标题subplot(2,2,4),imhist(a) %输出均衡化后直方图title('均衡化后图像直方图') %在均衡化后直方图上加标题四.实验步骤1. 启动matlab双击桌面matlab图标启动matlab环境;2. 在matlab命令窗口中输入相应程序。
数字图像处理及应用(MATLAB)第1章
图 采样示意图 如果是彩色图像,则是以三基色(RGB)的明亮度作为分量的二 维矢量函数来表示。即
f(x,y)=
f R ( x, y)
f G ( x, y)
f B ( x, y)
T
同一维信号一样,二维图像信号的采样也要遵循采样定理。二 维信号采样定理与数字电路中讲的一维信号采样定理类似。
2. 量化
(4) 数码摄像机 数码摄像机进行工作的基本原理简单的说就是光-电-数字信号 的转变与传输。即通过感光元件将光信号转变成电流,再将模拟电 信号转变成数字信号,由专门的芯片进行处理和过滤后得到的信息 还原出来就是我们看到的动态画面了。 数码摄像机的感光元件能 把光线转变成电荷,通过模数转换器芯片转换成数字信号。
量化示意图
一幅图像在采样时,行、列的采样点与量化时每个像素量化的 级数,既影响数字图像的质量,也影响到该数字图像数据量的大小。 假定图像取M×N个样点,每个像素量化后的灰度二进制位数为Q, 一般Q总是取为2的整数幂,即Q = 2k, 则存储一幅数字图像所需的 二进制位数b为
b M N Q
编著化学工业出版社数字图像处理实验第一章数字图像处理基础11图像及图像的数字化12图像的采集及常用格式13数字图像处理及主要应用14matlab及其在图像处理中的应用11图像及图像的数字化111图像及分类图像是自然界景物的客观反映是人类认识世界和人类本身的重要源泉
高等教育 “ 十二五 ” 规划教材
数字图像处理及应用
1.2.3 数字图像类型 1.二值图像 只有黑白两种颜色的图像 称为黑白图像或单色图像,是 指图像的每个像素只能是黑或 者白,没有中间的过度,故又 称二值图像。二值图像的像素 值只能为0或1,图像中的每个 像素值用1位存储。一幅 640×480像素的黑白图像只 需要占据37.5KB的存储空间,
matlab数字图像处理函数大全
Import, Export, and ConversionDisplay and ExplorationGeometric Transformation, Spatial ReferencingImage EnhancementImage AnalysisRead image from graphics fileWrite image to graphics fileInformation about graphics fileRead metadata from National Imagery Transmission Format (NITF) file Read image from NITF fileRead metadata from DPX fileRead DPX imageRead metadata from header file of Analyze 7.5 data setRead image data from image file of Analyze 7.5 data setRead metadata from Interfile fileRead images in Interfile formatAnonymize DICOM fileGet or set active DICOM data dictionaryDisplay DICOM file structureRead metadata from DICOM messageFind attribute in DICOM data dictionaryRead DICOM imageGenerate DICOM unique identifierWrite images as DICOM filesRead high dynamic range (HDR) imageWrite Radiance high dynamic range (HDR) image fileCreate high dynamic range imageRender high dynamic range image for viewingInterface for image I/OCheck if file is R-SetOpen R-Set fileCreate reduced resolution data set from image fileConvert grayscale or binary image to indexed imageConvert indexed image to grayscale imageConvert matrix to grayscale imageConvert RGB image or colormap to grayscaleConvert indexed image to RGB imageConvert label matrix into RGB imageConvert Bayer pattern encoded image to truecolor imageBinarize image by thresholdingQuantize image using specified quantization levels and output values Multilevel image thresholds using Otsu's methodAdaptive image threshold using local first-order statisticsGlobal histogram threshold using Otsu's methodConvert image to binary image, based on thresholdGlobal image threshold using Otsu's methodConvert grayscale image to indexed image using multilevel thresholdingConvert image to double precisionConvert image to 16-bit signed integersConvert image to Java buffered imageConvert image to single precisionConvert image to 16-bit unsigned integersConvert image to 8-bit unsigned integersCreate checkerboard imageCreate head phantom imageAdd noise to imageDisplay imageDisplay multiple image frames as rectangular montage Display multiple images in single figureMake movie from multiframe imagePlay movies, videos, or image sequencesDisplay image as texture-mapped surfaceGet values of Image Processing Toolbox preferencesDisplay Image Processing Toolbox Preferences dialog boxSet Image Processing Toolbox preferences or display valid values Image Viewer appImage Information toolAdjust Contrast toolDisplay Range toolDistance toolPixel Information toolPixel Information tool without text labelPixel Region toolMagnification box for scroll panelOverview tool for image displayed in scroll panelGet values of Image Processing Toolbox preferencesDisplay Image Processing Toolbox Preferences dialog boxSet Image Processing Toolbox preferences or display valid values Image Information toolChoose Colormap toolAdjust Contrast toolCrop imageDisplay Range toolDistance toolPixel Information toolPixel Information tool without text labelPixel Region toolPixel Region tool panelMagnification box for scroll panelOverview tool for image displayed in scroll panelOverview tool panel for image displayed in scroll panelSave Image ToolScroll panel for interactive image navigationCreate draggable ellipseCreate draggable freehand regionCreate draggable, resizable lineCreate draggable pointCreate draggable, resizable polygonCreate draggable rectangleRegion-of-interest (ROI) base classSelect polyline with mouseSpecify points with mouseSpecify rectangle with mouseImage data from axesImage model object from image objectImage Model objectConvert axes coordinates to pixel coordinatesInformation about image attributesGet handle to current axes containing imageGet handle to current figure containing imageOpen Image dialog boxGet all image handlesAdd function handle to callback listCheck validity of handleGet Application Programmer Interface (API) for handleRetrieve pointer behavior from HG objectDirectories containing IPT and MATLAB iconsCreate pointer manager in figureDelete function handle from callback listStore pointer behavior structure in Handle Graphics object Align figure windowsCreate rectangularly bounded drag constraint functionAdjust display size of imagencing, and Image RegistrationCrop imageResize imageRotate imageTranslate imageImage pyramid reduction and expansionApply geometric transformation to imageFit geometric transformation to control point pairsApply 2-D spatial transformation to imageFind output bounds for spatial transformationFlip input and output roles of TFORM structureCreate resampling structureCreate spatial transformation structure (TFORM)Apply spatial transformation to N-D arrayApply forward spatial transformationApply inverse spatial transformationCreate checkerboard image2-D Affine Geometric Transformation3-D Affine Geometric Transformation2-D Projective Geometric Transformation2-D piecewise linear geometric transformation2-D Polynomial Geometric Transformation2-D Local Weighted Mean Geometric TransformationApply geometric transformation to imageIntensity-based image registrationEstimate geometric transformation that aligns two 2-D or 3-D images Display imageCompare differences between imagesComposite of two imagesReference 2-D image to world coordinatesReference 3-D image to world coordinatesIntensity-based image registrationConfigurations for intensity-based registrationEstimate geometric transformation that aligns two 2-D or 3-D images Estimates geometric transformation that aligns two 2-D images using phase Estimate displacement field that aligns two 2-D or 3-D images Composite of two imagesCompare differences between imagesMattes mutual information metric configuration objectMean square error metric configuration objectRegular step gradient descent optimizer configuration objectOne-plus-one evolutionary optimizer configuration objectControl Point Selection ToolFit geometric transformation to control point pairsTune control-point locations using cross correlationConvert CPSTRUCT to valid pairs of control pointsNormalized 2-D cross-correlationInfer spatial transformation from control point pairsAdjust image intensity values or colormapAdjust Contrast toolSharpen image using unsharp maskingEnhance contrast using histogram equalizationContrast-limited adaptive histogram equalization (CLAHE)Adjust histogram of image to match N-bin histogram of reference image Apply decorrelation stretch to multichannel imageFind limits to contrast stretch imageConvert integer values using lookup tableAdd noise to imageN-D filtering of multidimensional images2-D Gaussian filtering of images3-D Gaussian filtering of 3-D imagesCreate predefined 2-D filterGuided filtering of imagesNormalized 2-D cross-correlation2-D adaptive noise-removal filtering2-D median filtering2-D order-statistic filteringLocal standard deviation of imageLocal range of imageLocal entropy of grayscale imageGeneral sliding-neighborhood operationsCreate Gabor filter or Gabor filter bankApply Gabor filter or set of filters to 2-D image2-D box filtering of images3-D box filtering of 3-D imagesCalculate integral imageCalculate 3-D integral image2-D box filtering of integral images3-D box filtering of 3-D integral imagesExtract objects from binary image by sizeExtract objects from binary image using properties Pad array2-D frequency response2-D FIR filter using frequency sampling2-D FIR filter using frequency transformation2-D FIR filter using 1-D window method2-D FIR filter using 2-D window method2-D convolution matrixBinary hit-miss operationMorphological operations on binary images Ultimate erosionRemove small objects from binary imageBottom-hat filteringSuppress light structures connected to image border Morphologically close imageDilate imageErode imageExtended-maxima transformExtended-minima transformFill image regions and holesH-maxima transformH-minima transformImpose minimaMorphologically open imageMorphological reconstructionRegional maximaRegional minimaTop-hat filteringWatershed transformCreate connectivity arrayCheck validity of connectivity argumentNeighborhood operations on binary images using lookup tables Nonlinear filtering using lookup tablesCreate lookup table for use with bwlookupMorphological structuring elementMorphological offset structuring elementDeblur image using blind deconvolutionDeblur image using Lucy-Richardson methodDeblur image using regularized filterDeblur image using Wiener filterTaper discontinuities along image edgesConvert optical transfer function to point-spread function Convert point-spread function to optical transfer functionPad arraySpecify polygonal region of interest (ROI)Convert region of interest (ROI) polygon to region maskFill in specified regions in image using inward interpolation Select region of interest (ROI) based on colorFilter region of interest (ROI) in imageCreate draggable ellipseCreate draggable freehand regionCreate draggable, resizable polygonCreate draggable rectangleRegion-of-interest (ROI) base classInterface for image I/ODistinct block processing for imageDetermine optimal block size for block processingGeneral sliding-neighborhood operationsRearrange matrix columns into blocksColumnwise neighborhood operationsRearrange image blocks into columnsAbsolute difference of two imagesAdd two images or add constant to imageLinear combination of color channelsComplement imageDivide one image into another or divide image by constant Linear combination of imagesMultiply two images or multiply image by constantSubtract one image from another or subtract constant from image Trace region boundaries in binary imageTrace object in binary imagePlot region boundariesFind edges in intensity imageFind circles using circular Hough transformCreate circleGradient magnitude and direction of an imageDirectional gradients of an imageFind 3-D gradient magnitude and direction of imagesFind the directional gradients of a 3-D imageHough transformExtract line segments based on Hough transformIdentify peaks in Hough transformQuadtree decompositionBlock values in quadtree decompositionSet block values in quadtree decompositionMeasure properties of image regionsArea of objects in binary imageExtract objects from binary image by sizeFind connected components in binary imageGenerate convex hull image from binary imageDistance transform of binary imageGeodesic distance transform of binary imageEuler number of binary imageFind perimeter of objects in binary imageExtract objects from binary image using propertiesSelect objects in binary imageGray-weighted distance transform of grayscale imageCreate contour plot of image dataHistogram of image dataPixel color valuesPixel-value cross-sections along line segments2-D correlation coefficientAverage or mean of matrix elementsStandard deviation of matrix elementsLabel connected components in 2-D binary imageLabel connected components in binary imageCreate label matrix from bwconncomp structurePack binary imageUnpack binary imageEntropy of grayscale imageLocal entropy of grayscale imageLocal range of imageLocal standard deviation of imageCreate gray-level co-occurrence matrix from imageProperties of gray-level co-occurrence matrixMean-squared errorPeak Signal-to-Noise Ratio (PSNR)Structural Similarity Index (SSIM) for measuring image qualitySegment image into foreground and background using active contour Binary image segmentation using Fast Marching MethodSegment image into two or three regions using geodesic distance-based colorCalculate weights for image pixels based on image gradient Calculate weights for image pixels based on grayscale intensity difference Select contiguous image region with similar gray valuesGlobal image threshold using Otsu's methodMultilevel image thresholds using Otsu's methodGlobal histogram threshold using Otsu's methodAdaptive image threshold using local first-order statisticsFind region boundaries of segmentation2-D superpixel oversegmentation of imagesBurn binary mask into 2-D imageConvert label matrix to cell array of linear indicesDistance transform of binary imageGeodesic distance transform of binary imageGray-weighted distance transform of grayscale imageHough transform2-D discrete cosine transformDiscrete cosine transform matrixConvert fan-beam projections to parallel-beamFan-beam transform2-D inverse discrete cosine transformInverse fan-beam transformInverse Radon transformConvert parallel-beam projections to fan-beamRadon transform2-D fast Fourier transformShift zero-frequency component to center of spectrum2-D inverse fast Fourier transformInverse FFT shiftConvert RGB to CIE 1976 L*a*b*Convert RGB color values to NTSC color spaceConvert RGB to CIE 1931 XYZConvert RGB color values to YCbCr color spaceConvert CIE 1976 L*a*b* to RGBConvert CIE 1976 L*a*b* to CIE 1931 XYZConvert CIE 1931 XYZ to CIE 1976 L*a*b*Convert CIE 1931 XYZ to RGBConvert YCbCr color values to RGB color spaceConvert NTSC values to RGB color spaceConvert L*a*b* data to doubleConvert L*a*b* data to uint16Convert L*a*b* data to uint8Convert XYZ color values to doubleConvert XYZ color values to uint16Search for ICC profilesRead ICC profileFind system default ICC profile repositoryWrite ICC color profile to disk fileTrue for valid ICC color profileCreate color transformation structureApply device-independent color space transformation Approximate indexed image by reducing number of colors XYZ color values of standard illuminantsAdaptive image threshold using local first-order statistics Find region boundaries of segmentationRemove small objects from binary imageTrace region boundaries in binary imageFind connected components in binary imageDistance transform of binary imageEuler number of binary imageLabel connected components in 2-D binary image Nonlinear filtering using lookup tables Morphological operations on binary imagesPack binary imageFind perimeter of objects in binary imageSelect objects in binary imageTrace object in binary imageUnpack binary imageCreate connectivity arrayConvert Bayer pattern encoded image to truecolor image Find edges in intensity imageFit geometric transformation to control point pairs Create predefined 2-D filterDefault display range of image based on its classSelect contiguous image region with similar gray values Enhance contrast using histogram equalizationHough transformExtract line segments based on Hough transform Identify peaks in Hough transformConvert HSV colormap to RGB colormapConvert image to double precisionConvert image to 16-bit signed integersConvert image to single precisionConvert image to 16-bit unsigned integersConvert image to 8-bit unsigned integersAbsolute difference of two imagesAdjust image intensity values or colormapBinarize image by thresholdingBottom-hat filtering2-D box filtering of imagesSuppress light structures connected to image border Morphologically close imageComplement imageCrop imageDilate imageErode imageExtended-maxima transformExtended-minima transformFill image regions and holesN-D filtering of multidimensional imagesFind circles using circular Hough transformApply Gabor filter or set of filters to 2-D image2-D Gaussian filtering of imagesFind 3-D gradient magnitude and direction of imagesFind the directional gradients of a 3-D imageHistogram of image dataH-maxima transformH-minima transformLinear combination of imagesMean-squared errorMorphologically open imageBurn binary mask into 2-D imageImage pyramid reduction and expansionQuantize image using specified quantization levels and output values Read image from graphics fileMorphological reconstructionRegional maximaRegional minimaResize imageRotate imageTop-hat filteringTranslate imageApply geometric transformation to image2-D box filtering of integral imagesCalculate integral imageConvert integer values using lookup tableCheck validity of colormapCheck validity of connectivity argumentConvert CIE 1976 L*a*b* to RGBConvert label matrix into RGB imageConvert label matrix to cell array of linear indicesAverage or mean of matrix elements2-D median filteringMultilevel image thresholds using Otsu's method2-D order-statistic filteringGlobal histogram threshold using Otsu's methodPad arrayPeak Signal-to-Noise Ratio (PSNR)Measure properties of image regionsConvert RGB image or colormap to grayscaleConvert RGB colormap to HSV colormapConvert RGB to CIE 1976 L*a*b*Convert RGB color values to YCbCr color spaceFind limits to contrast stretch image2-D superpixel oversegmentation of imagesWatershed transformConvert YCbCr color values to RGB color spaceReference 2-D image to world coordinatesReference 3-D image to world coordinates2-D Affine Geometric Transformation2-D Projective Geometric TransformationMorphological structuring elementMorphological offset structuring elementDistance transform of binary imageLabel connected components in 2-D binary image Nonlinear filtering using lookup tablesMorphological operations on binary images2-D correlation coefficientFind edges in intensity imageEnhance contrast using histogram equalizationConvert image to double precisionConvert image to single precisionConvert image to 8-bit unsigned integersConvert image to 16-bit unsigned integersAbsolute difference of two imagesAdjust image intensity values or colormapBottom-hat filteringMorphologically close imageComplement imageDilate imageErode imageFill image regions and holesN-D filtering of multidimensional imagesGradient magnitude and direction of an image Directional gradients of an imageHistogram of image dataLinear combination of imagesAdd noise to imageConvert YCbCr color values to RGB color space Morphologically open imageMorphological reconstructionEstimate displacement field that aligns two 2-D or 3-D images Resize imageRotate imageDisplay imageTop-hat filteringInverse Radon transformConvert matrix to grayscale imageAverage or mean of matrix elements2-D median filteringNormalized 2-D cross-correlationPad arrayRadon transformMeasure properties of image regionsConvert RGB image or colormap to grayscaleConvert RGB color values to YCbCr color spaceStandard deviation of matrix elementsLocal standard deviation of imageFind limits to contrast stretch image从图形文件读取图像写入图像到图形文件关于图形文件的信息从国家图像传输格式的元数据(NITF)文件从NITF文件读取图像读取DPX文件元数据读取DPX图像从分析7.5数据集的头文件读取元数据从分析7.5数据集的图像文件中读取图像数据从归档文件元数据在内部文件格式读取图像匿名DICOM文件获取或设置活动DICOM数据字典显示DICOM文件结构读取DICOM消息元数据发现在DICOM数据字典属性读取DICOM图像生成DICOM的唯一标识符写图像的DICOM文件读高动态范围(HDR)图像写下光辉的高动态范围(HDR)图像文件创建高动态范围图像用于观看的高动态范围图像图像I / O接口检查文件是否存在与r-组开放与r-组文件从图像文件创建减少的分辨率数据集将灰度或二值图像转换为索引图像将索引图像转换为灰度图像转换矩阵到灰度图像将RGB图像的灰度或颜色表索引图像的RGB图像转换转换成RGB图像标签矩阵Bayer编码图像转换为彩色图像二值化图像的阈值分割量化图像使用指定的量化电平和输出值采用多级图像阈值Otsu方法采用局部一阶统计的自适应图像阈值使用全局直方图阈值Otsu方法基于阈值的图像转换成二值图像使用全局阈值Otsu方法采用多层阈值化方法将灰度图像转换为索引图像将图像转换为双精度将图像转换为16位有符号整数将图像转换成java缓冲图像将图像转换为单精度将图像转换为16位无符号整数将图像转换为8位无符号整数创建棋盘格图像创建头部影像添加噪声到图像显示图像显示多个图像帧矩形蒙太奇在单个图形中显示多个图像从多帧图像的电影播放电影、视频或图像序列显示图像作为纹理映射的表面获取图像处理工具箱的首选项显示图像处理工具箱首选项对话框设置图像处理工具箱的首选项或显示有效值图像查看器应用程序图像信息的工具对比度调整工具显示范围的工具距离工具像素信息的工具无文本标签的像素信息工具像素区域的工具用于滚动面板的放大盒在滚动面板中显示的图像的概述工具获取图像处理工具箱的首选项显示图像处理工具箱首选项对话框设置图像处理工具箱的首选项或显示有效值图像信息的工具选择映射工具对比度调整工具作物图像显示范围的工具距离工具像素信息的工具无文本标签的像素信息工具像素区域的工具像素区域工具面板用于滚动面板的放大盒在滚动面板中显示的图像的概述工具滚动面板中显示的图像的工具面板保存图像的工具用于交互式图像导航的滚动面板创建可拖动椭圆创建可拖动自由区域创建可拖动,可调整大小的线创建可拖动点创建可拖动,可调整大小的多边形创建可拖动矩形感兴趣区域(感兴趣区域)基类用鼠标选择多段线用鼠标指定点用鼠标指定矩形从轴的图像数据图像对象的图像模型对象图像模型对象将坐标轴转换为像素坐标关于图像属性的信息获取当前包含图像的轴的句柄获取当前图像包含图像的句柄打开图像对话框获取所有图像处理添加函数句柄到回调列表检查处理的有效性获取处理的应用程序程序员接口(接口)从汞对象检索指针行为目录包含了IPT和Matlab的图标创建图形中的指针管理器从回调列表中删除函数句柄句柄图形对象中的存储指针行为结构排列图的窗口创建矩形拖动约束函数有界调整图像的显示大小作物图像调整图像大小旋转图像转换图像图像金字塔的还原与扩展将几何变换应用于图像拟合控制点对的几何变换二维空间变换在图像中的应用查找空间变换的输出范围输入和输出翻转平台结构的作用创建重采样结构创造空间转换结构(平台)将空间变换N-D数组应用前向空间变换应用逆空间变换创建棋盘格图像二维仿射几何变换三维仿射几何变换二维射影几何变换二维分段线性几何变换二维多项式几何变换二维局部加权平均几何变换将几何变换应用于图像基于强度的图像配准估计对齐两个二维或三维图像的几何变换显示图像比较图像之间的差异两幅图像的复合参考二维图像到世界坐标参考三维图像到世界坐标基于强度的图像配准基于强度的注册的配置估计对齐两个二维或三维图像的几何变换使用相位相关的两个二维图像的几何变换估计估计对齐两个二维或三维图像的位移场两幅图像的复合比较图像之间的差异Mattes互信息度量的配置对象均方误差度量配置对象正规步长梯度下降优化配置对象一加一进化优化配置对象控制点选择工具拟合控制点对的几何变换使用交叉相关的调整控制点位置cpstruct转换控制点的有效对标准化二维互相关从控制点对的空间变换调整图像的灰度值或颜色表对比度调整工具利用反锐化掩模图像锐化采用直方图均衡化增强对比度对比度自适应直方图均衡化(CLAHE)调整直方图的图像与参考图像n-bin直方图申请去相关拉伸的多通道图像查找对比度拉伸图像的限制使用查找表转换整数值添加噪声到图像N维的多维图像滤波二维图像的二维高斯滤波三维图像的三维高斯滤波创建预定义的二维滤波器图像引导滤波标准化二维互相关二维自适应噪声滤除二维中值滤波二维阶统计滤波图像局部标准偏差局部图像范围灰度图像局部熵一般滑动邻域运算Gabor滤波器和Gabor滤波器组的创建应用Gabor滤波器或滤波器组二维图像二维图像的二维图像滤波三维图像的三维盒滤波计算积分图像计算三维积分图像积分图像的二维箱滤波三维整体图像的三维箱滤波通过大小从二值图像中提取对象使用属性从二值图像中提取对象焊盘阵列二维频率响应采用频率采样的二维滤波器采用频率变换的二维滤波器二维FIR滤波器采用一维窗口的方法采用二维窗法的二维二维滤波器二维卷积矩阵二进制命中错误操作二值图像的形态学运算终极侵蚀从二值图像中删除小对象帽子底部过滤抑制连接到图像边缘的光结构形态接近的图像放大图像腐蚀图像扩展极大值变换扩展最小变换填充图像区域和孔h-maxima变换利用H-minima变换强制最小形态上打开的图像形态重构区域极值局部极小顶帽滤波分水岭变换创建连接的阵列检查连通性参数的有效性使用查找表的二值图像的邻域运算使用查找表的非线性滤波创建bwlookup使用查找表形态学结构元素形态学偏移结构元素利用盲反卷积去模糊图像用露西理查德森的方法去模糊图像利用正则化滤波复原图像使用维纳滤波复原图像沿图像边缘的锥度不连续性将光学传递函数转换为点扩散函数转换点扩展函数到光传输函数焊盘阵列指定感兴趣区域(投资回报率)将感兴趣区域(感兴趣区域)的多边形转换为区域掩模用内插法填充图像中的指定区域基于颜色的选择感兴趣区域(感兴趣区域)图像中的感兴趣区域(感兴趣区域)创建可拖动椭圆创建可拖动自由区域创建可拖动,可调整大小的多边形创建可拖动矩形感兴趣区域(感兴趣区域)基类图像I / O接口图像的不同块处理确定块处理的最佳块大小一般滑动邻域运算将矩阵列重新排列成块纵列邻域操作将图像块重新排列成列两幅图像的绝对差添加两个图像或添加常量到图像彩色通道的线性组合补充图像用常数将一幅图像分割成另一幅图像图像的线性组合用常数相乘的两幅图像或多幅图像从另一个或减去一个图像减去一个图像二元图像中的迹区域边界二进制图像中的跟踪对象绘图区域的边界在强度图像中查找边缘发现使用Hough变换圆创建圈子图像的梯度幅值和方向图像的方向梯度查找图像的三维梯度幅值和方向查找三维图像的方向梯度Hough变换基于Hough变换提取直线段确定峰Hough变换四叉树分解在四叉树分解块值在四叉树分解模块设置的值图像区域的测量特性二值图像中的对象区域通过大小从二值图像中提取对象查找二进制图像中的连接组件从二值图像生成凸壳图像二值图像的距离变换二值图像的测地距离变换二值图像的欧拉数在二值图像中查找对象的周长使用属性从二值图像中提取对象在二值图像中选择对象灰度图像的灰度加权距离变换创建图像数据的等高线图图像数据直方图像素的颜色值沿线段的像素值的横截面二维相关系数矩阵元素的平均值或平均值矩阵元素的标准偏差二维二值图像中的标签连接部件二值图像中的标签连接组件从bwconncomp创建标签矩阵结构包的二进制图像打开二进制图像灰度图像熵灰度图像局部熵局部图像范围图像局部标准偏差从图像创建灰度共生矩阵灰度共生矩阵的性质均方误差峰值信噪比(PSNR)结构相似性指数(SSIM)测量图像质量用主动轮廓分割成前景和背景的图像采用快速行进法的二值图像分割用基于测地距离的彩色分割的两个或三个区域的分割图像基于图像梯度的图像像素权重计算基于灰度强度差的图像像素权重计算选择具有相似灰度值的连续图像区域使用全局阈值Otsu方法采用多级图像阈值Otsu方法使用全局直方图阈值Otsu方法采用局部一阶统计的自适应图像阈值查找区域边界的分割二维超像素oversegmentation的图像将二元掩模烧成二维图像将标签矩阵转换为线性指标的单元阵列图像变换二值图像的距离变换二值图像的测地距离变换灰度图像的灰度加权距离变换Hough变换二维离散余弦变换离散余弦变换矩阵将扇形束投影转换成平行光束扇束变换二维逆离散余弦变换逆扇形束变换逆Radon变换将平行光束投影转换成扇形光束Radon变换二维快速傅立叶变换将零频分量移到光谱中心二维逆快速傅立叶变换逆FFT转换颜色转换转换RGB与CIE 1976 L*a*b*将RGB颜色值的NTSC色彩空间转换RGB与CIE 1931 XYZ转换到YCbCr色彩空间RGB颜色值1976将CIE L*a*b*到RGB1976将CIE L*a*b*到CIE 1931 XYZ将CIE 1931 XYZ CIE 1976 L*a*b*CIE 1931 XYZ到RGB的转换YCbCr颜色值转换到RGB颜色空间转换成NTSC值RGB颜色空间将L * A * B *数据转换为双将L*a*b*数据uint16将L*a*b*数据卡片XYZ颜色值转换为双将XYZ颜色值uint16搜索国际商会简介读的ICC配置文件查找系统默认的国际刑事法院配置文件库将颜色配置文件写入磁盘文件真正的有效的国际刑事法院颜色配置文件创建颜色转换结构应用设备独立的颜色空间变换通过减少颜色数的近似索引图像标准照明体XYZ颜色值generation采用局部一阶统计的自适应图像阈值查找区域边界的分割从二值图像中删除小对象二元图像中的迹区域边界查找二进制图像中的连接组件二值图像的距离变换二值图像的欧拉数二维二值图像中的标签连接部件使用查找表的非线性滤波二值图像的形态学运算包的二进制图像在二值图像中查找对象的周长在二值图像中选择对象二进制图像中的跟踪对象打开二进制图像创建连接的阵列Bayer编码图像转换为彩色图像在强度图像中查找边缘拟合控制点对的几何变换创建预定义的二维滤波器基于它的类的图像的默认显示范围选择具有相似灰度值的连续图像区域采用直方图均衡化增强对比度Hough变换基于Hough变换提取直线段确定峰Hough变换转换到RGB的色度HSV颜色图将图像转换为双精度将图像转换为16位有符号整数将图像转换为单精度将图像转换为16位无符号整数将图像转换为8位无符号整数两幅图像的绝对差调整图像的灰度值或颜色表二值化图像的阈值分割帽子底部过滤二维图像的二维图像滤波抑制连接到图像边缘的光结构形态接近的图像补充图像作物图像放大图像腐蚀图像扩展极大值变换扩展最小变换填充图像区域和孔N维的多维图像滤波发现使用Hough变换圆应用Gabor滤波器或滤波器组二维图像二维图像的二维高斯滤波查找图像的三维梯度幅值和方向查找三维图像的方向梯度图像数据直方图h-maxima变换利用H-minima变换图像的线性组合均方误差形态上打开的图像将二元掩模烧成二维图像图像金字塔的还原与扩展量化图像使用指定的量化电平和输出值从图形文件读取图像形态重构区域极值局部极小调整图像大小旋转图像顶帽滤波转换图像将几何变换应用于图像积分图像的二维箱滤波计算积分图像使用查找表转换整数值检查的有效性信息检查连通性参数的有效性1976将CIE L*a*b*到RGB转换成RGB图像标签矩阵将标签矩阵转换为线性指标的单元阵列矩阵元素的平均值或平均值二维中值滤波采用多级图像阈值Otsu方法二维阶统计滤波使用全局直方图阈值Otsu方法焊盘阵列峰值信噪比(PSNR)图像区域的测量特性将RGB图像的灰度或颜色表将RGB颜色表HSV色图转换RGB与CIE 1976 L*a*b*转换到YCbCr色彩空间RGB颜色值查找对比度拉伸图像的限制二维超像素oversegmentation的图像分水岭变换YCbCr颜色值转换到RGB颜色空间参考二维图像到世界坐标参考三维图像到世界坐标二维仿射几何变换二维射影几何变换形态学结构元素形态学偏移结构元素GPU 计算二值图像的距离变换二维二值图像中的标签连接部件使用查找表的非线性滤波二值图像的形态学运算二维相关系数在强度图像中查找边缘采用直方图均衡化增强对比度将图像转换为双精度将图像转换为单精度将图像转换为8位无符号整数将图像转换为16位无符号整数两幅图像的绝对差调整图像的灰度值或颜色表帽子底部过滤形态接近的图像补充图像放大图像腐蚀图像填充图像区域和孔N维的多维图像滤波图像的梯度幅值和方向图像的方向梯度图像数据直方图图像的线性组合添加噪声到图像YCbCr颜色值转换到RGB颜色空间形态上打开的图像形态重构估计对齐两个二维或三维图像的位移场调整图像大小旋转图像显示图像顶帽滤波逆Radon变换转换矩阵到灰度图像矩阵元素的平均值或平均值二维中值滤波标准化二维互相关焊盘阵列Radon变换图像区域的测量特性将RGB图像的灰度或颜色表转换到YCbCr色彩空间RGB颜色值矩阵元素的标准偏差图像局部标准偏差查找对比度拉伸图像的限制。
如何进行MATLAB图像处理
如何进行MATLAB图像处理一、引言图像处理是计算机视觉和图像分析领域中的重要任务之一。
而MATLAB是一种强大的数学计算软件,也被广泛应用于图像处理。
本文将介绍如何使用MATLAB进行图像处理,并探讨一些常见的图像处理技术。
二、图像处理基础在开始使用MATLAB进行图像处理之前,我们需要了解一些基础知识。
一个图像通常由像素组成,每个像素都有一个灰度值或者RGB(红绿蓝)三个通道的值。
图像的处理可以分为两个主要方面:空间域处理和频域处理。
1. 空间域处理空间域图像处理是指直接对图像的像素进行操作,常见的处理方法包括亮度调整、对比度增强和图像滤波等。
MATLAB提供了一系列函数和工具箱来进行这些处理。
例如,要调整图像的亮度,可以使用imadjust函数。
该函数可以通过调整输入图像的灰度值范围,实现亮度的增强或者降低。
下面是一个简单的例子:```matlabI = imread('image.jpg'); % 读取图像J = imadjust(I,[0.2 0.8],[0 1]); % 调整亮度范围imshow(J); % 显示图像```2. 频域处理频域图像处理是指将图像从空间域转换到频域进行处理,常见的处理方法包括傅里叶变换和滤波等。
MATLAB提供了fft和ifft等函数来进行频域处理。
例如,要对图像进行傅里叶变换,可以使用fft2函数。
该函数将图像转换为频率域表示,可以进一步进行滤波等处理。
下面是一个简单的例子:```matlabI = imread('image.jpg'); % 读取图像F = fft2(I); % 傅里叶变换F = fftshift(F); % 频率域中心化imshow(log(1 + abs(F)),[]); % 显示频率域图像```三、图像处理技术了解了图像处理的基础知识后,我们可以探索一些常见的图像处理技术。
以下将介绍几个常用的技术,并给出相应的MATLAB代码示例。
《数字图像处理(matlab版)》教程课件
直
原
接
图
阈
像
值
分
割
0.25
算 法
算 法 算 法
割
分
法
算
OTSU
Niblack
KittlerMet
Kapur
割
分
值
阈
动
自
/2、图像的点运算
五、直方图均衡化
DB f
添 加 高 斯 白 噪 声
添 加 椒 盐 噪 声
/4、空间域图像增强 二、空间域滤波
滤波过程就是在图像f(x,y)中逐点移动模板,使模板中心和点(x,y)重合,滤波器 在每一点(x,y)的响应是根据模板的具体内容并通过预先定义的关系来计算的。
W(-1,-1) W(-1,0) W(-1,1)
W(0,-1) W(0,0) W(0,1)
原 图 像 及 直 方 图
图像变暗后灰度均衡化 图像变亮后灰度均衡化
/3、图像的几何变换
一、图像平移
正变换
1 0 0
[ x1 y1 1] [ x0 y0 1] 0 1 0
Tx
Ty
1
逆变换
1
0 0
[x0 y0 1] [x1 y1 1] 0
1 0
Tx
Ty
1
strel %用来创建形态学结构元素 translate(SE,[y x])%原结构元素SE上y和x方向平移 imdilate%形态学膨胀
thresh法:最大类间方差法自动单阈值分割。
Kapur算法:一维直方图熵阈值算法
niblack算法:局部阈值分割 阈值的计算公式是T = m + k*v,其中m为以该像素点为中心的区域的平 均灰度值,v是该区域的标准差,k是一个系数。
数字图像处理ch01(MATLAB)-课件
2024/10/12
第一章 绪论
17
2024/10/12
第一章 绪论
18
2024/10/12
第一章 绪论
19
2024/10/12
第一章 绪论
20
<2>几何处理
放大、缩小、旋转,配准,几何校正,面积、周长计算。
请计算台湾的陆地面积
2024/10/12
第一章 绪论
21
<3>图象复原
由图象的退化模型,求出原始图象
图像处理是指按照一定的目标,用一系列的操 作来“改造”图像的方法.
2024/10/12
第一章 绪论
7
➢图象处理技术的分类(从方法上进行分类)[2]
1.模拟图象处理(光学图像处理等)
用光学、电子等方法对模拟信号组成的图像,用光学器 件、电子器件进行光学变换等处理得到所需结果(哈哈 镜、望远镜,放大镜,电视等).
2024/10/12
第一章 绪论
22
<4>图象重建[3]
[3]此图像来自罗立民,脑成像,
2024/10/12
第一章 绪论
23
/zhlshb/ct/lx.htm
2024/10/12
第一章 绪论
图形用户界面,动画,网页制作等
2024/10/12象处理的基本概念,和基 本问题,以及一些典型的应用。
2024/10/12
第一章 绪论
33
提问
摄像头(机),扫描仪,CT成像装置,其他图象成像装置
2)图象的存储
各种图象存储压缩格式(JPEG,MPEG等),海量图象数据库技术
3)图象的传输
内部传输(DirectMemoryAccess),外部传输(主要是网络)
数字图像处理实验matlab4
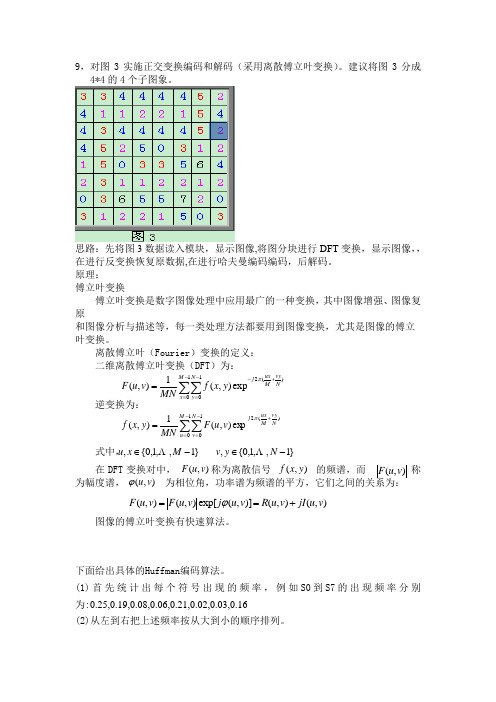
9,对图3实施正交变换编码和解码(采用离散傅立叶变换)。
建议将图3分成4*4的4个子图象。
思路:先将图3数据读入模块,显示图像,将图分块进行DFT 变换,显示图像,,在进行反变换恢复原数据,在进行哈夫曼编码编码,后解码。
原理:傅立叶变换傅立叶变换是数字图像处理中应用最广的一种变换,其中图像增强、图像复原和图像分析与描述等,每一类处理方法都要用到图像变换,尤其是图像的傅立 叶变换。
离散傅立叶(Fourier )变换的定义:二维离散傅立叶变换(DFT )为:逆变换为:式中,在DFT 变换对中, 称为离散信号 的频谱,而 称为幅度谱,为相位角,功率谱为频谱的平方,它们之间的关系为:图像的傅立叶变换有快速算法。
下面给出具体的Huffman 编码算法。
(1)首先统计出每个符号出现的频率,例如S0到S7的出现频率分别为:0.25,0.19,0.08,0.06,0.21,0.02,0.03,0.16(2)从左到右把上述频率按从大到小的顺序排列。
∑∑-=-=+-=1010)(2exp ),(1),(M x N y N vy M ux j y x f MN v u F π∑∑-=-=+=101)(2exp ),(1),(M u N v N vy M ux j v u F MN y x f π}1,,1,0{,-∈M x u }1,,1,0{,-∈N y v ),(v u F ),(y x f ),(v u F ),(v u ϕ),(),()],(exp[),(),(v u jI v u R v u j v u F v u F +==ϕ(3)将最小的两个数相加的值表上*号,其余的数据不变,然后将得到的数据排序(4)重复(3),直到只有两个数据。
(5) 从最后一列概率编码,从而得到最终编码。
具体过程如下图所示:概率压缩过程:初始信源信源的消减步骤 符号概率 1 2 3 4 5 6 S00.25 0.25 0.25 0.25 0.35* 0.4* 0.6* 0.21 0.21 0.21 0.25 0.35 0.4 0.19 0.19 0.19 0.21 0.25 0.16 0.16 0.19* 0.19 0.08 0.11* 0.16 0.06 0.08 0.05*S40.21 S10.19 S70.16 S20.08 S30.06 S60.03 S5 0.02表 3-1 哈夫曼概率压缩过程编码过程: 初始信源 对消减信源的赋值符号 概率 编码 1 2 3 4 5 6 S00.25 01 0.25 01 0.25 01 0.25 01 0.35*00 0.4* 1 0.6* 0 0.21 10 0.21 10 0.21 10 0.25 01 0.35 00 0.4 1 0.19 11 0.19 11 0.19 11 0.21 10 0.25 01 0.16 001 0.16 001 0.19*000 0.19 11 0.08 0001 0.11* 0000 0.16 0001 0.06 00000 0.08 0001 0.05* 00001S40.21 10 S10.19 11 S70.16 001 S20.08 0001 S30.06 00000 S60.03 S5 0.02表 3-2 哈夫曼算法编码过程算法流程此处并没有采用概率排序, 而是采用对灰度像素个数 读入图像 初始化 统计每种灰度数灰度数排序排序,这是因为计算概率无 疑增大了计算量,因此用灰 度级的像素个数替代图3-1 哈夫曼算法程序流程图程序:clc;clear;close all ;A=[3 3 4 4 4 4 5 24 1 1 2 2 15 44 3 4 4 4 45 24 5 2 5 0 3 1 21 5 0 3 3 5 6 42 3 1 1 2 2 1 20 3 6 5 5 7 2 03 1 2 2 1 5 0 6];subplot(2,2,1),imshow(A);title('原图');I=double(A);P=A(1:4,1:4);K=fft(P);P1=A(1:4,5:8);K1=fft(P1);P2=A(5:8,1:4);K2=fft(P2);P3=A(5:8,5:8);K3=fft(P3);for i=1:4for j=1:4H(i,j)=K(i,j);endendfor i=1:4for j=5:8H(i,j)=K1(i,j-4);endendfor i=5:8 按哈夫曼算法编码 将灰度编码表及原图的编码写入txtfor j=1:4H(i,j)=K2(i-4,j);endendfor i=5:8for j=5:8H(i,j)=K3(i-4,j-4);endendsubplot(2,2,2),imshow(H);title('DFT变换后的频域图像');I=H(1:4,1:4);M=ifft(I);I1=H(1:4,5:8);M1=ifft(I1);I2=H(5:8,1:4);M2=ifft(I2);I3=H(5:8,5:8);M3=ifft(I3);for i=1:4for j=1:4A1(i,j)=M(i,j);endendfor i=1:4for j=5:8A1(i,j)=M1(i,j-4);endendfor i=5:8for j=1:4A1(i,j)=M2(i-4,j);endendfor i=5:8for j=5:8A1(i,j)=M3(i-4,j-4);endendsubplot(2,2,3),imshow(A1);title('复原图像');%编码%读入图像,定义结构体,便于存储I=A;pix(8)=struct('huidu',0.0,...'number',0.0,...'bianma','');[m n l]=size(I);fid=fopen('E:\学习\数字图像处理\huffman.txt','w');%huffman.txt是灰度级及相应的编码表fid1=fopen('E:\学习\数字图像处理\huff_compara.txt','w');%huff_compara.txt是编码表huf_bac=cell(1,l);for t=1:l %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %初始化结构数组for i=1:8pix(i).number=1;pix(i).huidu=i-1;pix(i).bianma='';end%统计每种灰度像素的个数记录在pix数组中for i=1:mfor j=1:nk=I(i,j,t)+1;pix(k).number=1+pix(k).number;endend%按灰度像素个数从大到小排序for i=1:7for j=i+1:8if pix(i).number<pix(j).numbertemp=pix(j);pix(j)=pix(i);pix(i)=temp;endendendfor i=8:-1:1if pix(i).number ~=0break;endendnum=i;count(t)=i;%记录每层灰度级%定义用于求解的矩阵clear huffmanhuffman(num,num)=struct('huidu',0.0,...'number',0.0,...'bianma','');huffman(num,:)=pix(1:num);%矩阵赋值for i=num-1:-1:1p=1;%算出队列中数量最少的两种灰度的像素个数的和sum=huffman(i+1,i+1).number+huffman(i+1,i).number;for j=1:i%如果当前要复制的结构体的像素个数大于sum就直接复制if huffman(i+1,p).number>sumhuffman(i,j)=huffman(i+1,p);p=p+1;else%如果当前要复制的结构体的像素个数小于或等于sum就插入和的结构体%灰度值为-1标志这个结构体的number是两种灰度像素的和huffman(i,j).huidu=-1;huffman(i,j).number=sum;sum=0;huffman(i,j+1:i)=huffman(i+1,j:i-1);break;endendend%开始给每个灰度值编码for i=1:num-1obj=0;for j=1:iif huffman(i,j).huidu==-1obj=j;break;elsehuffman(i+1,j).bianma=huffman(i,j).bianma;endendif huffman(i+1,i+1).number>huffman(i+1,i).number%说明:大概率的编0,小概率的编1,概率相等的,标号大的为1,标号小的为0huffman(i+1,i+1).bianma=[huffman(i,obj).bianma '0']; huffman(i+1,i).bianma=[huffman(i,obj).bianma '1'];elsehuffman(i+1,i+1).bianma=[huffman(i,obj).bianma '1']; huffman(i+1,i).bianma=[huffman(i,obj).bianma '0'];endfor j=obj+1:ihuffman(i+1,j-1).bianma=huffman(i,j).bianma;endendfor k=1:count(t)huf_bac(t,k)={huffman(num,k)}; %保存endend%写出灰度编码表for t=1:lfor b=1:count(t)fprintf(fid,'%d',huf_bac{t,b}.huidu);fwrite(fid,' ');fprintf(fid,'%s',huf_bac{t,b}.bianma);fwrite(fid,' ');endfwrite(fid,'%');end%解码%按原图像数据,写出相应的编码,也就是将原数据用哈夫曼编码替代for t=1:lfor i=1:mfor j=1:nfor b=1:count(t)if I(i,j,t)==huf_bac{t,b}.huiduM(i,j,t)=huf_bac{t,b}.huidu;%将灰度级存入解码的矩阵 fprintf(fid1,'%s',huf_bac{t,b}.bianma);fwrite(fid1,' ');%用空格将每个灰度编码隔开break;endendendfwrite(fid1,',');%用空格将每行隔开endfwrite(fid1,'%');%用%将每层灰度级代码隔开endfclose(fid);fclose(fid1);M=uint8(M);save('M')%存储解码矩阵Msubplot(2,2,4),imshow(A);title('解码后图');原图DFT变换后的频域图像复原图像解码后图对应编码:0 00011 0012 103 0114 115 0106 000007 00001矩阵的编码11 001 001 10 10 001 010 11 ,11 011 11 11 11 11 010 10 ,11 010 10 010 0001 011 001 10 ,001 010 0001 011 011 010 00000 11 ,10 011 001 001 10 10 001 10 ,0001 011 00000 010 010 00001 10 0001 ,011 001 10 10 001 010 0001 00000 ,解码矩阵:M =3 34 4 4 45 24 1 1 2 2 15 44 3 4 4 4 45 24 5 2 5 0 3 1 21 5 0 3 3 5 6 42 3 1 1 2 2 1 2 0 3 6 5 5 7 2 0 3 1 2 2 1 5 0 6。
MATLAB图像处理技术与实例展示

MATLAB图像处理技术与实例展示引言图像处理是一门涉及数字图像处理和计算机视觉的重要学科,它在日常生活中的应用范围非常广泛。
MATLAB作为一种强大的数值计算和可视化工具,提供了许多图像处理的函数和工具箱,能够帮助实现各种图像处理任务。
本文将介绍一些常用的MATLAB图像处理技术,并提供相应的实例展示。
一、图像加噪与去噪图像加噪是指在原始图像上添加一些随机扰动,使原始图像的细节模糊或失真。
在实际应用中,图像往往会受到各种因素的影响,如传感器噪声、压缩噪声等。
为了恢复原始图像的质量,需要进行去噪处理。
MATLAB提供了许多图像加噪和去噪的函数和工具箱。
例如,使用imnoise函数可以在图像上添加高斯噪声、椒盐噪声等。
而使用imnlmfilt函数可以实现非局部均值去噪算法,通过对邻域像素的均值进行补偿,可以有效降低噪声。
实例展示:下面以一个简单的实例展示图像去噪的过程。
首先,我们使用imnoise函数在一张原始图像上添加高斯噪声:```MATLABI = imread('original_image.jpg');noisy_image = imnoise(I, 'gaussian', 0, 0.02);```然后,我们使用imnlmfilt函数对添加噪声的图像进行去噪处理:```MATLABdenoised_image = imnlmfilt(noisy_image);```最后,我们可以将原始图像、添加噪声的图像和去噪后的图像进行对比,以评估去噪效果。
二、图像增强图像增强是指通过一系列的处理方法,改善图像的质量和视觉效果,使图像更加清晰、鲜艳。
图像增强的方法有很多,其中包括直方图均衡化、对比度增强、锐化等。
在MATLAB中,可以使用histeq函数实现直方图均衡化,通过重新分布图像灰度级的分布,增强图像的对比度和细节。
而使用imadjust函数可以进行对比度增强,通过调整图像对比度和亮度来增强图像的视觉效果。
数字图像处理matlab代码
一、编写程序完成不同滤波器的图像频域降噪和边缘增强的算法并进行比较,得出结论。
1、不同滤波器的频域降噪1.1 理想低通滤波器(ILPF)和二阶巴特沃斯低通滤波器(BLPF)clc;clear all;close all;I1=imread('me.jpg');I1=rgb2gray(I1);subplot(2,2,1),imshow(I1),title('原始图像');I2=imnoise(I1,'salt & pepper');subplot(2,2,2),imshow(I2),title('噪声图像');F=double(I2);g = fft2(F);g = fftshift(g);[M, N]=size(g);result1=zeros(M,N);result2=zeros(M,N);nn = 2;d0 =50;m = fix(M/2);n = fix(N/2);for i = 1:Mfor j = 2:Nd = sqrt((i-m)^2+(j-n)^2);h = 1/(1+0.414*(d/d0)^(2*nn));result1(i,j) = h*g(i,j);if(g(i,j)< 50)result2(i,j) = 0;elseresult2(i,j) =g(i,j);endendendresult1 = ifftshift(result1);result2 = ifftshift(result2);J2 = ifft2(result1);J3 = uint8(real(J2));subplot(2, 2, 3),imshow(J3,[]),title('巴特沃斯低通滤波结果'); J4 = ifft2(result2);J5 = uint8(real(J4));subplot(2, 2, 4),imshow(J5,[]),title('理想低通滤波结果');实验结果:原始图像噪声图像巴特沃斯低通滤波结果理想低通滤波结果1.2 指数型低通滤波器(ELPF)clc;clear all;close all;I1=imread('me.jpg');I1=rgb2gray(I1);I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);subplot(1,3,1),imshow(I2), title('原始图像'); %显示原始图像subplot(1,3,2),imshow(I4),title('加入混合躁声后图像 ');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=exp(log(1/sqrt(2))*(d/d0)^2);s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s)));subplot(1,3,3),imshow(s),title('ELPF滤波后的图像(d=40)');运行结果:1.3 梯形低通滤波器(TLPF)clc;clear all;close all;I1=imread('me.jpg');I1=rgb2gray(I1); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);subplot(1,3,1),imshow(I2),title('原始图像'); %显示原始图像subplot(1,3,2),imshow(I4),title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=10;d1=160;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 if (d<=d0)h=1;else if (d0<=d1)h=(d-d1)/(d0-d1);else h=0;endends(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3),imshow(s),title('TLPF滤波后的图像');运行结果:1.4 高斯低通滤波器(GLPF)clear all;clc;close all;I1=imread('me.jpg');I1=rgb2gray(I1);I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);subplot(1,3,1),imshow(I2),title('原始图像');subplot(1,3,2),imshow(I4),title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=1*exp(-1/2*(d^2/d0^2)); %GLPF滤波函数s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3),imshow(s),title('GLPF滤波后的图像(d=40)');运行结果:1.5 维纳滤波器clc;clear all;close all;I=imread('me.jpg'); %读取图像I=rgb2gray(I);I1=im2double(I);I2=imnoise(I1,'gaussian',0.01);I3=imnoise(I2,'salt & pepper',0.01);I4=wiener2(I3);subplot(1,3,1),imshow(I1),title('原始图像'); %显示原始图像subplot(1,3,2),imshow(I3),title('加入混合躁声后图像');I4=wiener2(I3);subplot(1,3,3),imshow(I4),title('wiener滤波后的图像');运行结果:结论:理想低通滤波器,虽然有陡峭的截止频率,却不能产生良好的效果,图像由于高频分量的滤除而变得模糊,同时还产生振铃效应。
数字图像处理实验(MATLAB版)
数字图像处理实验(MATLAB版)数字图像处理(MATLAB版)实验指导书(试用版)湖北师范学院教育信息与技术学院2009年4月试行目录实验一、数字图像获取和格式转换 2 实验二、图像亮度变换和空间滤波 6 实验三、频域处理7 实验四、图像复原9 实验五、彩色图像处理101实验六、图像压缩11 实验七、图像分割13 教材与参考文献142《数字图像处理》实验指导书实验一、数字图像获取和格式转换一、实验目的1掌握使用扫描仪、数码相机、数码摄像级机、电脑摄像头等数字化设备以及计算机获取数字图像的方法;2修改图像的存储格式;并比较不同压缩格式图像的数据量的大小。
二、实验原理数字图像获取设备的主要性能指标有x、y方向的分辨率、色彩分辨率(色彩位数)、扫描幅面和接口方式等。
各类设备都标明了它的光学分辨率和最大分辨率。
分辨率的单位是dpi,dpi是英文Dot Per Inch的缩写,意思是每英寸的像素点数。
扫描仪扫描图像的步骤是:首先将欲扫描的原稿正面朝下铺在扫描仪的玻璃板上,原稿可以是文字稿件或者图纸照片;然后启3动扫描仪驱动程序后,安装在扫描仪内部的可移动光源开始扫描原稿。
为了均匀照亮稿件,扫描仪光源为长条形,并沿y方向扫过整个原稿;照射到原稿上的光线经反射后穿过一个很窄的缝隙,形成沿x方向的光带,又经过一组反光镜,由光学透镜聚焦并进入分光镜,经过棱镜和红绿蓝三色滤色镜得到的RGB三条彩色光带分别照到各自的CCD 上,CCD将RGB光带转变为模拟电子信号,此信号又被A/D变换器转变为数字电子信号。
至此,反映原稿图像的光信号转变为计算机能够接受的二进制数字电子信号,最后通过串行或者并行等接口送至计算机。
扫描仪每扫一行就得到原稿x方向一行的图像信息,随着沿y方向的移动,在计算机内部逐步形成原稿的全图。
扫描仪工作原理见图1.1。
4图1.1扫描仪的工作原理在扫描仪的工作过程中,有两个元件起到了关键的作用。
一个是CCD,它将光信号转换成为电信号;另一个是A/D变换器,它将模拟电信号变为数字电信号。
数字图像处理(Matlab复习代码)

双线性插值法I_=imread('test.jpg');I=rgb2gray(I_);A=0.7;B=0.7;%失真像素坐标[i,j]=size(I);m=round(i*A);n=round(j*B);temp=zeros(m,n);%产生m*n矩阵G=[A 0;0 B];for x=1:mfor y=1:nab=[x,y]/G;%取得x/A,y/Ba=ab(1)-floor(ab(1));%权值b=ab(2)-floor(ab(2));%防溢出处理if ab(1)<1ab(1)=1;endif ab(1)>iab(1)=i;endif ab(2)<1ab(2)=1;endif ab(2)>jab(2)=j;end%定义内插值坐标ab11=[floor(ab(1)) floor(ab(2))];ab12=[floor(ab(1)) ceil(ab(2))];ab21=[ceil(ab(1)) floor(ab(2))];ab22=[ceil(ab(1)) ceil(ab(2))]; temp(x,y)=(1-a)*(1-b)*I(ab11(1),ab11(2))+... a*(1-b)*I(ab12(1),ab12(2))+...(1-a)*b*I(ab21(1),ab21(2))+...a*b*I(ab22(1),ab22(2));endendimshow(uint8(temp)),title('0.7倍双线性'); 最近邻法I_=imread('test.jpg');%读入原始图像I1=rgb2gray(I_);[i,j]=size(I1);m=round(i*1.5);n=round(j*1.5);m_=round(i*0.7);n_=round(j*0.7);% 1.5倍最邻近TEMP=zeros(m,n);%产生m*n矩阵for i = 1:mfor j = 1:nTEMP(i,j)=I1(round(i/1.5),round(j/1.5));endendsubplot(1,3,1) ,imshow(I1),title('原图')TEMP1_5=uint8(TEMP);subplot(1,3,2),imshow(TEMP1_5),title('1.5倍最邻近')全局预测下的图像分割I_=imread('test.jpg');I=rgb2gray(I_);[m,n]=size(I);% 统计直方图zhifangtu=zeros(1,255);%for i=1:1:mfor j=1:1:nzhifangtu(I(i,j)+1)=zhifangtu(I(i,j)+1)+1;endendplot(zhifangtu);%阈值处理final=zeros(m,n);for x=1:1:mfor y=1:1:nAA=I(x,y);if AA > 120final(x,y)=255;elsefinal(x,y)=0;endendendimshow(uint8(final));高通滤波(锐化)Sobel算子O=imread('test.jpg');I=rgb2gray(O);imshow(I);title('锐化前的原始图像');[m,n]=size(I);TEMP=zeros(m+2,n+2);%避免边界为空,用0像素值填充for i=1:1:mfor j=1:1:nTEMP(i+1,j+1)=I(i,j);endend%定义所需的空间vertical=zeros(m,n);horize=zeros(m,n);for x=2:1:m+1for y=2:1:n+1%上下水平模板vertical(x-1,y-1)=[-TEMP(x-1,y-1)+TEMP(x-1,y+1)-TEMP(x,y-1)+ TEMP(x,y+1)-TEMP(x+1,y-1)+TEMP(x+1,y+1)]; %左右垂直模板horize(x-1,y-1)=[-TEMP(x-1,y-1)-TEMP(x-1,y)-TEMP(x-1,y+1)+ TEMP(x+1,y-1)+TEMP(x+1,y)+TEMP(x+1,y+1)];endendfigure;imshow(vertical);title('垂直模板锐化'); figure;imshow(vertical_);title('阈值处理后的垂直模板锐化');figure;imshow(horize);title('水平模板锐化'); figure;imshow(horize_);title('阈值处理后的水平模板锐化');低通滤波:线性滤波(邻域平均法)I=imread('eight.tif');%读入原始图像[m n]=size(I);a_ = imnoise(I,'salt & pepper',0.04);%对图像加椒盐噪声,噪声强度为0.04a=double(a_);%先将uint8转换为double类型,以免数据溢出TEMP=zeros(m+2,n+2);%数值填充,产生一个临时的空间for i=1:1:mfor j=1:1:nTEMP(i+1,j+1)=a(i,j);endendfinal=zeros(m,n);for x=2:1:m+1for y=2:1:n+1final(x-1,y-1)=[TEMP(x-1,y-1)+TEMP(x-1,y)+TEMP(x-1,y+1)+ TEMP(x,y-1)+TEMP(x,y)+TEMP(x,y+1)+TEMP(x+ 1,y-1)+TEMP(x+1,y)+TEMP(x+1,y+1)]/9;endendfinal2=uint8(final)非线性滤波(中值滤波)I=imread('eight.tif');%读入原始图像[m n]=size(I);a_ = imnoise(I,'salt & pepper',0.04);%对图像加椒盐噪声,噪声强度为0.04TEMP=zeros(m+2,n+2);%数值填充,产生一个临时的空间for i=1:1:mfor j=1:1:nTEMP(i+1,j+1)=a_(i,j);endend%中值滤波final=zeros(m,n);% zeros(m,n)产生m×n的零矩阵for x=2:1:m+1for y=2:1:n+1final(x-1,y-1)=median([TEMP(x-1,y-1),TEMP(x-1,y),TEMP(x-1,y +1),TEMP(x,y-1),TEMP(x,y),TEMP(x,y+1),TEMP( x+1,y-1),TEMP(x+1,y),TEMP(x+1,y+1)]);endend图像直方图I=imread('test.jpg'); J=rgb2gray(I);figure,subplot(2,2,1) H=zeros(1,256);% zeros(m,n)产生m ×n 的零矩阵 [m n]=size(J); for i=1:m for j=1:nH(J(i,j)+1)=H(J(i,j)+1)+1; %从第一个开始,并统计灰度值 end endplot(H);stem(H);%绘制二维离散数据的火柴杆图 %归一化直方图N=numbel(J );%统计图像像素的总数 for i=1:m for j=1:nH2(J(i,j)+1)=[H2(J(i,j)+1)+1]/N; end end %图像均衡化%一,图像的预处理,读入彩色图像将其灰度化 cd d:I=imread('test.jpg'); H=rgb2gray(I); imshow(H);%二,绘制直方图[m,n]=size(H); %测量图像尺寸参数GL=zeros(1,256); %预创建存放灰度出现概率的向量 for k=0:255GL(k+1)=length(find(H==k))/(m*n); %计算每级灰度出现的概率,将其存入GP 中相应位置 endfigure,bar(0:255,GL,'g') %绘制直方图 title('原图像直方图') xlabel('灰度值') ylabel('出现概率')%三,直方图均衡化S1=zeros(1,256); % zeros(m,n)产生m ×n 的零矩阵 for i=1:256 for j=1:iS1(i)=GL(j)+S1(i); %计算变换函数Sk end endS2=round((S1*256)+0.5); %将Sk 归到相近级的灰度 for i=1:256GLPeq(i)=sum(GL(find(S2==i))); %计算现有每个灰度级出现的概率 endfigure,bar(0:255,GLPeq,'b') %显示均衡化后的直方图 title('均衡化后的直方图') xlabel('灰度值') ylabel('出现概率') %显示均衡化后的图像title('均衡化后图像')imwrite(PA,'JUNHENGHUA.bmp');。
数字图像处理(MATLAB版)(第2版)

目录分析
1.1数字图像处理的 发展
1.2数字图像的相关 概念
1.3数字图像处理的 内容
1.4数字图像处理的 方法
1
1.5图像数字 化技术
2
1.6图像的统 计特征
3
1.7数字图像 的应用
4
1.8 MATLAB 领略
5 1.9 MATLAB
图像处理应用 实例
小结
习题
1
2.1图像类型 的转换
2
2.2线性系统
数字图像处理(MATLAB版)(第2版)
读书笔记模板
01 思维导图
03 目录分析 05 读书笔记
目录
02 内容摘要 04 作者介绍 06 精彩摘录
思维导图
本书关键字分析思维导图
几何变换
技术
图像
基础
图像
特征
数字图像处理
版
数字图像
内容 小结
数字图像
第版
习题
边界
第章
图像增强
滤波
运算
内容摘要
本书主要内容包括:全书共10章,分别介绍了数字图像的相关论述、数字图像的处理基础、图像编码、图像 复原、图像几何变换、图像频域变换、图像几何变换、小波变换、图像增强、图像分割与边缘检测及图像特征描 述等内容。
10.8形态学重建 10.9特征度量
小结 10.10查表操作
习题
作者介绍
这是《数字图像处理(MATLAB版)(第2版)》的读书笔记模板,暂无该书作者的介绍。
读书笔记
这是《数字图像处理(MATLAB版)(第2版)》的读书笔记模板,可以替换为自己的心得。
精彩摘录
这是《数字图像处理(MATLAB版)(第2版)》的读书笔记模板,可以替换为自己的精彩内容摘录。
数字图像处理及应用(MATLAB)第3章
程序运行结果如图(c)所示。
4.灰度非线性变换 当用某些非线性函数,例如平方、对数、指数函数等作为 映射函数时,可实现图像灰度的非线性变换。灰度的非线性 变换简称非线性变换,是指由这样一个非线性单值函数所确 定的灰度变换。 (1)对数变换 对数变换常用来扩展低值灰度,压缩高值灰度,这样可以使低值灰 度的图像细节更容易看清,从而达到增强的效果。对数非线性变换
[例] 假设一个图像由一个4×4大小的二维数值矩阵构成,如图(a)
所示,试写出图像的灰度分布,并画出图像的直方图。
灰度直方图计算示意图
经过统计图像中灰度值为0的像素有1个,灰度值为1的 像素有1个,…,灰度值为6的像素有1个。由此得到图像的 灰度分布如表所示,由表可得灰度直方图如图(b)所示。 图像的灰度分布
3.1.2 (rk)代表概 率密度函数,并且有下式成立:
nk Pr (rk ) 0 rk 1 n k 0,1,2,l 1
式中nk为图像中出现rk这种灰度的像素数,n是图像中像素 总数,nk/n就是概率论中的频数,l是灰度级的总数目。在直 角坐标系中作出rk与P(rk)的关系图形,就得到直方图
图 不同的图像其直方图却是相同的
图 直方图的叠加性质
由以上可知,尽管直方图不能表示出某灰度级的像素在什么位
置,更不能直接反映出图像内容,但是却能描述该图像的灰度分布
特性,使人们从中得到诸如图像的明亮程度、对比度等,成为一些 处理方法的重要依据。通常一幅均匀量化的自然图像由于其灰度直
方图分布集中在较窄的低值灰度区间,引起图像的细节看不清楚,
(a)反变换关系
(b) 原图 图像反转的效果
(c)变换后的图像
由直线方程截斜式可知当k =-1,b=L-1时,其表达式为:
数字图像处理第二版MatLab代码大全

4.3
空域滤波增强
Matlab 实现的邻域平均法抑制噪声的程序: I=imread('eight.tif'); J=imnoise(I,'salt & pepper', 0.02); subplot(231),imshow(I);title('原图像'); subplot(232),imshow(J);title('添加椒盐噪声图像') k1=filter2(fspecial('average',3),J); %进行 3×3 模板平滑滤波 k2=filter2(fspecial('average',5),J); %进行 5×5 模板平滑滤波 k3=filter2(fspecial('average',7),J); %进行 7×7 模板平滑滤波 k4=filter2(fspecial('average',9),J); %进行 9×9 模板平滑滤波 subplot(233),imshow(uint8(k1));title('3×3 模板平滑滤波'); subplot(234),imshow(uint8(k2));title('5×5 模板平滑滤波'); subplot(235),imshow(uint8(k3));title('7×7 模板平滑滤波'); subplot(236),imshow(uint8(k4));title('9×9 模板平滑滤波') 例 4.10:使用中值滤波降低图像噪声
9
xlabel(‘\theta (degrees)’); ylabel(‘X\prime’); set(gca,’Xtick’,0:20:180); colormap(hot); colorbar;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字图像处理(MATLAB版)实验指导书(试用版)本实验指导书配合教材和课堂笔记中的例题使用目录实验一、数字图像获取和格式转换 2 实验二、图像亮度变换和空间滤波 6 实验三、频域处理7 实验四、图像复原9 实验五、彩色图像处理10 实验六、图像压缩11 实验七、图像分割13 教材与参考文献14《数字图像处理》实验指导书实验一、数字图像获取和格式转换一、实验目的1掌握使用扫描仪、数码相机、数码摄像级机、电脑摄像头等数字化设备以及计算机获取数字图像的方法;2修改图像的存储格式;并比较不同压缩格式图像的数据量的大小。
二、实验原理数字图像获取设备的主要性能指标有x、y方向的分辨率、色彩分辨率(色彩位数)、扫描幅面和接口方式等。
各类设备都标明了它的光学分辨率和最大分辨率。
分辨率的单位是dpi,dpi是英文Dot Per Inch的缩写,意思是每英寸的像素点数。
扫描仪扫描图像的步骤是:首先将欲扫描的原稿正面朝下铺在扫描仪的玻璃板上,原稿可以是文字稿件或者图纸照片;然后启动扫描仪驱动程序后,安装在扫描仪内部的可移动光源开始扫描原稿。
为了均匀照亮稿件,扫描仪光源为长条形,并沿y方向扫过整个原稿;照射到原稿上的光线经反射后穿过一个很窄的缝隙,形成沿x方向的光带,又经过一组反光镜,由光学透镜聚焦并进入分光镜,经过棱镜和红绿蓝三色滤色镜得到的RGB三条彩色光带分别照到各自的CCD上,CCD将RGB光带转变为模拟电子信号,此信号又被A/D变换器转变为数字电子信号。
至此,反映原稿图像的光信号转变为计算机能够接受的二进制数字电子信号,最后通过串行或者并行等接口送至计算机。
扫描仪每扫一行就得到原稿x方向一行的图像信息,随着沿y方向的移动,在计算机内部逐步形成原稿的全图。
扫描仪工作原理见图1.1。
图1.1扫描仪的工作原理在扫描仪的工作过程中,有两个元件起到了关键的作用。
一个是CCD,它将光信号转换成为电信号;另一个是A/D变换器,它将模拟电信号变为数字电信号。
CCD 是Charge Couple Device的缩写,称为电荷耦合器件,它是利用微电子技术制成的表面光电器件,可以实现光电转换功能。
CCD在摄像机、数码相机和扫描仪中应用广泛,只不过摄像机中使用的是点阵CCD,即包括x、y两个方向用于摄取平面图像,而扫描仪中使用的是线性CCD,它只有x一个方向,y方向扫描由扫描仪的机械装置来完成。
CCD芯片上有许多光敏单元,它们可以将不同的光线转换成不同的电荷,从而形成对应原稿光图像的电荷图像。
数码相机的系统结构(见图1.2)数码相机的许多特殊部件,如图像传感器(CCD 或CMOS)、模/数转换器(A/D)、数字信号处理单元(DSP)、图像存储器、液晶显示器(LCD)以及输出控制单元(连接端口)等是传统胶片相机所没有的。
仔细分析一下数码相机的原理方框图,我们不难发现,数码相机的系统工作过程就是把光信号转化为数字信号的过程。
数码相机使用CCD电荷耦合器件这种光敏元件代代替胶卷感光成像。
光线通过透镜系统和滤色器(滤光器)投射到CCD光敏元件上,CCD元件将其光强和色彩转换为电信号记录到数码相机的存储器中,形成计算机可以处理的数字信号。
数码相机除了光学透镜系统外,其余几乎全由电子电路控制。
基本的信号处理过程非常简单。
由CCD送来的电信号通过A/D转换器转换为数字信号,然后送入具有信号处理能力的DSP(数字信号处理器)。
DSP处理工作量很大,一般都设计成专用的硬件。
信号进一步送给离散余弦变换部件DCT进行JPEG压缩,然后通过接口电路记录到位于最后一级的存储器。
图1.2 数码相机原理图数码摄像机的感光器件也即数码摄像机感光成像的部件,能把光线转变成电荷,通过模数转换器芯片转换成数字信号。
目前数码摄像机的核心成像部件有两种:一种是广泛使用的CCD(电荷藕合)元件;另一种是CMOS(互补金属氧化物导体)器件。
电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
CCD由许多感光单位组成,通常以百万像素为单位。
当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
互补性氧化金属半导体CMOS(Complementary Metal-Oxide Semiconductor)和CCD一样同为在数码相机中可记录光线变化的半导体。
CMOS的制造技术和一般计算机芯片没什么差别,主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着带N(带–电)和 P(带+电)级的半导体,这两个互补效应所产生的电流即可被处理芯片纪录和解读成影像。
然而,CMOS的缺点就是太容易出现杂点, 这主要是因为早期的设计使CMOS在处理快速变化的影像时,由于电流变化过于频繁而会产生过热的现象。
由两种感光器件的工作原理可以看出,CCD的优势在于成像质量好,但是由于制造工艺复杂,只有少数的厂商能够掌握,所以导致制造成本居高不下,特别是大型CCD,价格非常高昂。
在相同分辨率下,CMOS价格比CCD便宜,但是CMOS器件产生的图像质量相比CCD来说要低一些。
到目前为止,市面上绝大多数的消费级别以及高端数码相机都使用CCD作为感应器;CMOS感应器则作为低端产品应用于一些摄像头上,是否具有CCD感应器变成了人们判断数码相机档次的标准之一。
三、实验步骤1扫描仪、数码相机(手机)、数码摄像机或电子摄像头通过数据线与计算机的连接;2打开计算机,安装外部设备的驱动程序;3将数字图像获取设备中的图像复制进计算机,保存;4调整彩色图像的色彩;5将获得的图像的格式分别转换为“*.gif”、“*.tif”、“*.jpg”的格式保存,检查图像文件数据量的大小。
将图片保存或拷贝到MA TLAB程序组根目录的“work”文件夹中,以便后面的实验做为“原图像”利用。
6记录和整理实验报告。
四、实验仪器1计算机;2扫描仪(或数码相机、数字摄像机等)及其驱动程序盘;3图像处理软件(画图,Photoshop, Microsoft photo edit等);4记录用的笔、纸。
五、实验报告内容1叙述操作过程2提交用扫描仪扫描得到的图像。
六、思考题1试述数字图像获取设备的工作原理。
2你使用过图像获取设备有哪些。
实验二、图像亮(灰)度变换与空间滤波一、实验目的1了解图像亮(灰)度变换与空间滤波的意义和手段;2熟悉图像亮(灰)度变换与空间滤波的MA TLAB函数和语法;3熟练掌握应用MA TLAB软件编程进行图像亮(灰)度变换与空间滤波的方法;4参照课本和课堂教学的例题对图像进行图像亮(灰)度变换与空间滤波。
二、实验原理图像亮(灰)度变换与空间滤波属于在空间域内处理图像,是直接对图像的像素进行处理。
有两种重要的空间域处理方法,即亮度(或灰度级)变换与空间滤波,后一种方法有时称为邻域处理或空间卷积。
图像亮(灰)度变换采用MATLAB工具箱中的亮度变换函数、直方图处理函数等函数及其相应的语法格式对实验一生成的图像进行处理;空间滤波采用MATLAB工具箱中的标准(线性和非线性)空间滤波器对图像进行空间滤波处理。
三、实验步骤1打开计算机,安装和启动MA TLAB程序;程序组中“work”文件夹中应有待处理的图像文件;2利用MatLab工具箱中的函数、语法,参照课本和课堂讲解的例题对图像进行图像亮(灰)度变换与空间滤波,并显示获得的图像;3记录和整理实验报告。
四、实验仪器1计算机;2 MA TLAB程序;3移动式存储器(软盘、U盘等)。
4记录用的笔、纸。
五、实验报告内容1叙述实验过程;2提交实验的原始图像和结果图像。
六、思考题1.MA TLAB程序的IPT中有哪些图像亮(灰)度变换函数?写出函数的语法。
2.图像亮(灰)度变换与空间滤波有什么不同?实验三、频域处理实验目的1了解图像频域处理的意义和手段;2熟悉离散傅里叶变换的基本性质;3熟练掌握图像傅里叶变换的方法及应用;4通过实验了解二维频谱的分布特点;5通过本实验掌握利用MA TLAB的工具箱实现数字图像的频域处理。
一、实验原理傅里叶变换是线性系统分析的一个有力工具,它能够定量地分析诸如数字化系统、采样点、电子放大器、卷积滤波器、噪音和显示点等的作用。
通过实验培养这项技能,将有助于解决大多数图像处理问题。
对任何想在工作中有效应用数字图像处理技术的人来说,把时间用在学习和掌握博里叶变换上是很有必要的。
2图像变换的基本原理(1)傅立叶(Fourier)变换的定义对于二维信号,二维Fourier变换定义为:二维离散傅立叶变换为:图像的傅立叶变换与一维信号的傅立叶变换变换一样,有快速算法。
实际上,现在有实现傅立叶变换的芯片,可以实时实现傅立叶变换。
二、实验步骤1打开计算机,启动MA TLAB程序;程序组中“work”文件夹中应有待处理的图像文件;2调入“实验一”中获取的数字图像,应用IPT函数(参照例题)进行图像频域处理;3显示原图像与频域处理后的图像及频谱图。
4记录和整理实验报告三、实验仪器1计算机;2 MA TLAB程序;3移动式存储器(软盘、U盘等)。
4记录用的笔、纸。
四、实验报告内容1叙述实验过程;2提交实验的原始图像和结果图像。
五、思考题1.叙述对数字图像进行DFT处理的原理。
2.通过对图像进行频域处理可以使图像产生什么样的变化?3.如何从空间滤波器获得频域滤波器?4.如何在频域中直接生成频域滤波器实验四、图像复原一、实验目的1、了解图像复原的原理;2、掌握常用图像复原方法。
二、实验原理1.分析不同条件下图像退化成因和处理方法;2.根据退化的数学模型对退化图像进行处理,复原原始图像。
三、实验步骤1打开计算机,启动MA TLAB程序;2调入“实验一”中获取的数字图像,应用IPT的函数对图像作模糊化和添加噪声处理;3 参照课本和课堂讲解的例题中的方法对退化的图像进行复原。
4记录和整理实验报告四、实验仪器1计算机;2 MA TLAB(含IPT)等程序;3移动式存储器(软盘、U盘等)。
4记录用的笔、纸。
五、实验报告内容1叙述实验过程;2提交实验的原始图像、退化图像和复原图像。
六、思考题1.常见的图像退化模型有哪些种类?2.不同的PSF对复原效果有什么影响?实验五、彩色图像处理一、实验目的1、了解彩色空间的基本概念及转换原理;2、熟悉MATLAB中彩色图像的表示方法;3、使用MatLab函数实现各类彩色空间的转换;4、使用MatLab函数实现各种图像类型的转换;二、实验原理(1)利用MATLAB的IPT进行彩色图像的读、写和显示;(2)颜色空间的基本概念;(3)颜色空间包括某个颜色域的所有颜色,实验中采用的颜色模型有NTSC、HSV、YcbCr模型等。