单自由度系统的无阻尼自由振动
单自由度无阻尼自由振动的系统分析

单自由度无阻尼自由振动的系统分析在结构动力学之中,单自由度体系的振动是最简单的振动,但单自由度体系的频率计算在结构动力学计算中有着十分重要的意义,因为从中我们能得到关于振动理论的一些最基本的概念和分析方法同时也为更复杂的多质点多自由度体系振动问题奠定基础,同时现实工程中也有许多振动问题可以简化为单自由度问题近似的利用单自由度振动理论去分析解决。
在单层厂房、水塔等建筑物中得到有效的利用结构的自由振动是指结构受到扰动离开平衡位置后,不再受到任何外力影响的振动过程,此处动力系统是否有阻尼项,会直接影响到动力系统的反应。
在此,我们把自由振动分为无阻尼自由振动与有阻尼的自由振动。
一、无阻尼自由系统的振动分析目前,以弹簧-质量系统为力学模型,研究单自由度系统的振动具有非常普遍的实际意义,因为工程中许多问题简化后,用单自由度体系的振动理论就能得到很好的解决。
而对多自由度系统和连续振动,在特殊坐标的考察时,也会显示出与单自由度系统类似的振动。
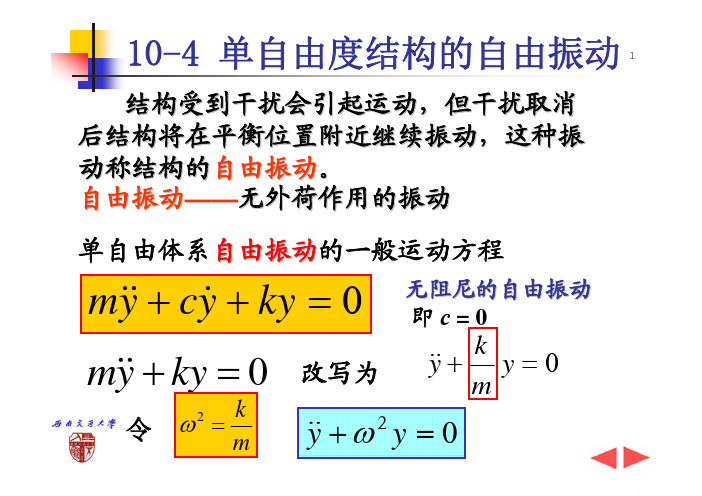
进行无阻尼自由振动分析的主要目的是为了获得系统固有振动的特性,只有充分地了解系统的自身振动特性才能有效的计算系统的动力响应,目前在单质点单自由度无阻尼自由振动体系中我们的运动方程为:0)()(..=+t ku t um (1) 或 0u(t))(=+ωt u (2)其中的ω是振动圆频率,是反应系统动力的重要参数,其计算公式为:m k m ==δω12 (3)由上式可以看出,ω只和系统的刚度及质量有关,而与系统所受到的初始受力状态无关。
ω的量纲与角速度相同为rad/s ,它反映了系统自由振动的快慢。
自由振动系统的这一特性,我们在日常生活中司空见惯。
比如,键盘类乐器标定后,按动某一个琴键,不管你按动的轻重如何,琴键所发出的声音的频率是一定的,按得轻或按得重仅影响声音的强弱。
(2)式经过三角函数的转换可表示为:)sin()(νω+=t A t u (4)其通解为t A t A t u ωωsin cos )(21+= 常数A 1与A 2与初始条件有关,01χ=A ωχ/02 =A式(4)是标准的简谐方程其中A 是其振幅,则ν是其初相角,他们的计算公式2020)(ωx x A += ,00arctan x x v ω=对于质点振动系统,质量越大,则系统的固有频率越低;刚度越大,则系统的固有频率越高。
单自由度振动系统

单自由度振动系统m质量,k刚度,c阻尼,有时有p激振力单自由度振动系统,指用一个独立参量便可确定系统位置的振动系统。
只要以它的平衡位置取为坐标原点,任一瞬时的质点坐标x(线位移)或 (角位移)就可以决定振动质点的瞬时位置。
根据牛顿定律:mx+cx+kx=F1.单自由度系统无阻尼自由振动mx+kx=0;x+kmx=0;令w m2=k/m,求微分方程的解,得x=c1e iw n t+c2e−iw n t=c1+c2cosw n t+i c1−c2sinw n t=b1cosw n t+b2sinw n t将其合成一个简谐振动,并代入初始条件:t=0时,x=x0,x=x0x=Asin(w n t+φ); A=x2+x02w n2; φ=tg−1x0w nx01.1固有频率系统的圆频率和频率只与系统本身的物理性质(弹性和惯性)有关,因此当振动系统的结构确定后,系统的振动频率就固定不变,而不管运动的初始条件如何,也和振幅的大小无关,因此成为固有圆频率和固有频率。
w n=km ;f n=12πkm1.2固有频率计算方法1)公式法。
根据公式w n=km计算2)静变形法。
根据质量块所处平衡位置的弹簧变形计算。
3)能量法。
根据能量守恒定律,由于无阻尼,无能量损失,12mx2+12kx2=E,将x的方程代入上式,系统的最大动能等于系统的最大弹性势能,计算求出。
4)瑞利法。
考虑到系统弹簧质量的计算方法,如假设系统的静态变形曲线作为假定的振动形式,根据推倒,得出系统的固有频率为w n=km+ρl3,式中加入的部分为“弹簧等效质量”不同振动系统的等效质量不同,只需先算出弹性元件的动能,根据T s =12m s x 2,计算即可。
1.3扭转振动根据扭转运动的牛顿定律 M =I θ,M 为施加到转动物体上的力矩,I 转动物体对于转动轴的转动惯量,θ角加速度。
圆盘转动惯量为I ,轴的转动刚度为kθ。
系统受到干扰后做扭转自由振动,振动时圆盘上受到一个由圆轴作用的与θ方向相反的弹性恢复力矩-K θθ。
第二章单自由度无阻尼系统的振动

第二章 单自由度无阻尼系统的振动单自由度系统是指用一个独立参量便可确定系统位置的振动系统。
系统的自由度数是指确定系统位置所必须的独立参数的个数,这种独立参量称为广义坐标,广义坐标可以是线位移、角位移等。
单自由度系统振动理论是振动理论的基础,尽管实际的机械都是弹性体,属多自由度系统,然而要掌握多自由度系统振动的基本理论和规律,就必须先掌握单自由度系统的振动理论。
此外,许多工程实际问题在一定条件下可以简化为单自由度振动系统来研究。
单自由度系统的力学模型如图2-1所示,图中,m 为质量元件(或惯性元件),k 为线性弹簧,C 为线性阻尼器。
图2-1所示系统称为单自由度有阻尼系统,若该系统不计阻尼,则称之为单自由度无阻尼系统,若在质量元件上作用有持续外界激扰力,则系统作强迫振动,如无持续的外界激扰力而只有初始的激扰作用,则系统作自由振动。
下面先研究单自由度无阻尼系统的自由振动,再进一步研究其强迫振动。
2—1 自由振动图2-2左图所示为单自由度无阻尼的弹簧质量系统。
现用牛顿第二定律来建立该系统的运动微分方程。
取质量m 的静平衡位置为坐标原点,取x 轴铅直向下为正,当系统处于平衡位置时有,δk mg =,故有静位移δ=mg/k (a )当系统处在位置x 处时,作用在质量上的力系不再平衡,有:mg x k xm ++-=)(δ (b) 式中:22/dt x d x = 是质量的加速度,将(a )式代入(b )式;则得 kx xm -= 即 0=+kx xm (2-1) 注意,上式中-kx 是重力与弹簧力的合力,它的大小与位移x 的大小成正比,但其方向却始终与位移的方向相反,即始终指向平衡位置,故称其为弹性恢复力。
由式(2-1)可以看到,只要取物体的静平衡位置为坐标原点,则在列运动微分方程时,可以不再考虑物体的重力与弹簧的静变形。
将(2-1)式改写成 0=+x m k x,令2p mk= 则得 02=+x p x (2-2)这是一个二阶齐次线性常系数微分方程。
单自由度系统自由振动

取物块的静平衡位置为坐标原点 O , x 轴顺弹簧 变形方向铅直向下为正。当物块在静平衡位置 时,由平衡条件,得到
mg k st
弹簧的静变形
当物块偏离平衡位置为x距离时,物块的运动微 分方程为
mx mg k ( st x)
mx kx
k 固有圆频率 令 : 0 m 无阻尼自由振动微分方程 2018年9 月4日
周期 T 2
0
; 则
1 0 2 2f T
f 称为振动的频率,表示每秒钟振动的次数,单位为1/s或Hz
0 称为固有角(圆)频率(固有频率),表示每2秒内振动
2018年9月4日 《振动力学》
的次数,单位为rad/s,只与系统的质量m和刚度系数k有关。
8
1.单自由度系统自由振动-无阻尼自由振动
统固有的物理参数,称为固有频率,振幅取决 于初始扰动的大小。阻尼振动的固有频率小于 无阻尼情形。临界阻尼和大阻尼条件下的系统 作非往复的衰减运动。
2018年9月4日 《振动力学》
3
单自由度系统自由振动
教学内容
• 无阻尼自由振动 • 能量法 • 等效质量和等效刚度 • 阻尼自由振动
2018年9月4日 《振动力学》
c1 A sin ,
c2 A cos
x t A sin 0 t
2018年9月4日 《振动力学》
无阻尼自由振动是简谐振动.
7
1.单自由度系统自由振动-无阻尼自由振动
1.2 无阻尼自由振动的特点
(1)固有频率
无阻尼自由振动是简谐振动,是一种周期振动
0 ( t T ) 0t 2
振动不能维持等幅而趋于衰减,称为有阻尼自由
西北工业大学振动学

1. 选择合适的坐标来描述系统中质量块的位置 ;
2. 确定系统的静平衡位置,并以此为振动位移的坐 标原点;
3. 给质量块一个正向位移和正向速度,画出此时质 量块或刚体的受力图,标明主动力和约束反力;
4. 对质量块运用牛顿第二定律:
F (t)
=
d dt
m
dx(t) dt
如果m是常量
F (t) = mx
y(n) + a1 y(n−1) + + an−1 y '+ an y = 0 该微分方程的特征方程可写为
n + a1 n−1 + + an−1 + an = 0
求通解的方法: 1)求特征方程的全部特征根; 2)根据特征根的情况,列出微分方程所对应的线性
无关的特解;
3)作线性无关的n个特解的任意常系数线性组合,
x
在系统静平衡时位置,向下为正。
系统振动微分方程为: mx + kx = 0
初始条件为: x (0) = − = − m g / k
x (0) = 0
振动特性为: x(t) = Rcos(nt − )
x(t) = −Rn sin(nt − )
16
2.4 例题 将初始条件代入系统的自由振动响应解:
1. 根据目标和系统边界识别系统
2. 确定包括输入、输出力在内的变量
3. 用理想单元近似各元件及其之间的连接
重力
单摆
4. 对隔离体做受力分析
5. 对隔离体写方程,消除不必要的变量
6. 用系统变量描述系统的边界条件和变量 的初始条件
5
2.1 基本概念和求解方法
单自由度体系的自由振动
令
ω2 = k
m
y + ω 2 y = 0
运动方程的解 y + ω 2 y = 0 可由振动的初 2
始条件来确定
常系数的线性齐次微分方程,其通解为
y(t) = A1 cosωt + A2 sinωt
若当 t = 0 时 y = y0 初位移
y(0) = y0 = A1 cosω × 0 + A2 sin ω × 0
因此,自振周期(或频率)的计算十分重 要。
例 计算自振频率
14
EI=常数
如果让振动体系沿振动方向发生单位位移时,所有刚 结点都不能发生转动(如横梁刚度为无穷大的刚架) 计算刚度系数方便。
两端刚结的杆的侧移刚度为:12EI
l3
一端铰结的杆的侧移刚度为:3EI
l3
例 计算自振频率
1
k11
EI=常数
12 EI l3
y = y0 初速度
y(0) = y0 = −ωA1 sinω × 0 + ωA2 cosω × 0
A1 = y0
A2
=
y0
ω
y(t)
=
y0
cosωt
+
y0
ω
sin ωt
位移的多项表达式
位移、速度的单项表达式
3
y(t)
=
y0
cosωt
+
y0
ω
sin ωt
若令
y(t) = a sinϕ cosωt + a cosϕ sin ωt
结构自振周期、频率
6
自振周期的倒数称为工程频率 f = 1
(或频率),记作 f
T
频率 f 表示单位时间内的振动次数,其常用单位
2-1结构动力学(单自由度)

O
t
这条曲线仍具有衰减性,但不具有波动性。
1, cr 2m
c 2m
c cr
阻尼比
(2)ξ> 1(强阻尼)情况
1,2 2 1 0
y t C1e1t C2e2t
t
y( t )
O
y (t ) e t C1 sinh 2 1 t C 2 cosh 2 1 t
g y st
y st m T 2 2 k g
频率只取决于体系的质量和刚度,而与外界因素 无关,是体系本身固有的属性,所以又称为固有频率
(natural frequency)。
(3)简谐自由振动的特性
y(t ) Asin( t )
(t ) A 2 sin(t ) y 加速度为: 惯性力为: FI (t ) m (t ) mA 2 sin(t ) y
特征根 一般解
2 2 2 0
1, 2 2 1
y(t ) C1e
1t
C2 e
2t
(1)ξ= 1(临界阻尼)情况
1,2
y C1 C2 t e t
y( t )
tan v
t
y y0 (1 t ) v0t e
d
阻尼对自振频率、周期的影响
,
d
Td T
在工程结构问题中,若0.01<ξ<0.1,可近似取:
d , Td T
y(t ) e t Asin ( d t )
阻尼对振幅的影响
yk Aetk Td e y k 1 Ae (tk Td )
第五章 单自由度系统的振动

上式也可改写为
F (t ) c0 ck cos(kt k )
式中
c0 a 0 / 2 ck ak2 bk2 bk k arct an ak
Cx Kx c0 ck cos(kt k ) M x
k 1
k 1
若系统的质量、刚度和阻尼分别为M、K和C,则此时受迫振动的微分方程为
c0相当于一个静载荷,它不引起振动,而只改变系统的静平衡位置。若令
k k
则稳态响应可以写为
ck x k cos(k t k k ) k 1 K
x e ( x0 cosd t
at
也可改写为 式中
d x Aeat sin(d t )
0 ax0 x
0 ax0 x
sin d t )
2 A x0 (
d
)2
arctan
d x0
0 ax0 x
从上面的式子可以看出,这时系统的运动为周期性的振动。其 振动圆频率为d ,称为有阻尼振动的固有频率,它比无阻尼自由振 动的固有频率 n 略小。振幅Ae-at随时间成指数形式衰减。如图给 出了这种衰减振动的响应曲线。
x A sin(nt )
式中:A称为振幅; 称为初相位,单位为rad。 无阻尼自由振动是一个以固有频率为频率的简谐振动。
设初始时刻t=0时的位移为x0、速度为v0,则可得
2 A x0 (v0 / 0 ) 2
x00 arctan 0 x
2、工程实例 机器或结构中的构件受一静负荷后要产生变形,其内 部要产生应力,分别称为静变形和静应力。而当受冲击或 产生振动时,构件要产生动变形和动应力。
第二章1-单自由度系统无阻尼自由振动上课讲义
x&0 0
3 2
,2
结论1
▪ 单自由度无阻尼自由振动为简谐振动—— 位移可以表示为时间的简谐函数(正弦或 余弦)
结论2 响应满足叠加原理
▪ 系统在初始位移单独 x 0 作用下的自由振动,
此时
x&0 , 0
x1 x0cosnt
▪ 系统在初始速度 x& 0 单独作用下的自由振动,
此时
x 0 , 0
x2
x&0
n
sin nt
系统总响应
▪ 振动系统总的响应=上述两部分响应之和
xx1x2x0cosnt x& 0 nsinnt
▪ 叠加性是线性系统的重要特征
数字特征
▪ A ——振幅,振动物体离开静平衡位置的最
大位移
▪
▪T
n
——圆频率 ——振动周期,旋转矢量转动一周
(2 ),振动物体的位移值也就重复一次,
m& x&F
方程化简
▪ 对于无阻尼自由振动,我们有
Fkx
▪ 因此,原方程改写为:
m& x& kx0
确定微分方程的初始条件
▪ 在t=0时,初始位移为 x 0 ,初始速度为 x& 0
▪ 则方程的初始条件为:
x(0) x0 和 x&(0) x&0
完整形式
▪ 单自由度无阻尼自由振动的运动微分方程 为:
第二章1-单自由度系统无阻尼自 由振动
几种单自由度系统的示例
O θ
S
隔离体受 力分析
kx
k
x(t)
m
O
S
O θ J
2-1无阻尼自由振动
▪ 自由振动:系统在初始激励下,或外加激 励消失后的一种振动形态。
隔振基本原理

隔振基本原理主动隔振和被动隔振的共同点是安装减振器(弹簧),但减振器安上去后,可能使要保护的电子产品的振动减小了。
也可能使振动比原来更大。
因此必须了解振动的基本原理,否则可能会得到相反的结果。
1.病动系统的组成机械振动时物体受交变力的作用,在莱一位置附近做往复运动。
如电动机放在一简支梁上,当电动机旋转时,由于转子的不平衡质量的惯性力引起电动机产生上下和左右方向的往复运动。
当限制其左右方向的运动时,就构成了最简单的上下方向的振动(单自由度系统的正弦振动),如图5—50(a)所示。
亿宾微电子电动机放在简支梁上,电动机的转动中心在0点,转子质量为mf,重心偏移在口点,偏心距为‘,转子转动的角速度为m,则转动时,转子产生的离心力为EJ,zJ的垂直分量为y2,水平分量为D:。
如果限制左右方向的运动,则电动机仅受yJ的交变作用。
如果只考虑简支梁的弹性,不计其质量,电动机连同底座的质量为m,视为一个集中质量,则电动机的振动模型可表示为图5—50(b),该图即为其力学模型。
研究机械振动时,往往把实际的复杂系统进行简化,抓主要因素,得出力学模型,然后用力学模型进行分析计算。
几种常见的振动力学模型如图5—5l所示,5—51(a)是单自由度系统自由振动;图5—51(b)是单自由度系统阻尼自由振动;图5—51(c)、5—51(d)是单自由度系统的强迫振动的两种形式。
固5—5l(c)中激振以交变力形式存在,图5—51(d)中激振以支承振动位移的形式加于系统。
物体呼弹性回复力和重力的作用,并只能在一个方向上振动的机械振动称为单自从图5—52(b)可以看出,这种振动只要一开始,就会不停地进行下去,这显然是不行的。
只要给振动系统加上阻尼f(常用阻尼比D表示),如图5—5l(b)所示,振动就很挟消失,这种振动称为阻尼自由振动。
3.单自由度系统的阻尼强迫振动实际产品的持续振动是取外来激振对弹性系统做功,即输入能量以弥补阻尼所消耗的能量来进行的。
单自由度体系自由振动

单自由度体系自由振动一、无阻尼振动单自由度体系自由振动可分为有阻尼和无阻尼振动两种。
在模型建立过程当中,可以直接进行建立。
在运行时,只需将c=0即可。
ω增加,单位时间内振动次数增加。
无阻尼振动是简谐振动,振幅和初相位仅取决于初位移和速度。
初始干扰反映了外部初始赋予体系能量的大小。
由于不考虑振动过程中体系能量的耗散,因而体系的总能量保持不变,这就表现为振幅A保持不变,永不衰减。
于是振动一旦发生便永不停息,但这仅是一种理想状态。
二、对阻尼自由振动的讨论当阻尼系数c不为0时,体系做阻尼运动。
由于有能量的耗散,体系的运动幅度会逐渐减小,最终停止振动。
有阻尼单自由度体系,自由振动的运动方程为ωξωm c m k t ky t y c t y m 2,0)()()(2===++∙∙∙, 则原式可变为022=++∙∙∙ωξωy y 。
解微分方程有如下结果:2.1 当1<ξ时,即小阻尼运动,方程的解为:)sin(A )sin cos ()(000ϕωωωξωωξωξω+=++=--t e t y v t y e t y d t d d d t 其中2200201)(ξωωωξω-=++=d d y v y A可画出小阻尼体系自由振动时的y-t曲线如图所示:是一条逐渐衰减的波动曲线2.2 当1>ξ时,即大阻尼的情况,方程的解为:⎥⎥⎦⎤⎢⎢⎣⎡-+--+=-t ch y t sh v y e t y o t ωξωξξξωωξ11)1()(20220 上式不含有简谐振动的因子,是因为体系受干扰后偏离平衡位置所积蓄起来的初始能量在恢复平衡位置的过程中全部消耗克服阻尼,由于阻尼很大,不足以引起振动。
当初始速度,初始位移都大于0时,可画出大阻尼体系自由振动时的y-t曲线如图所示:2.3 当1=ξ时,即临界阻尼的情况,方程的解为:[]t v t y e t y t 00)1)(++=-ωω(当初始速度,初始位移都大于0时,可画出临界阻尼体系自由振动时的y-t曲线如下图所示;当体系在临界阻尼时,其运动衰减的最快,即他能在最短时间内无振动的回到平衡位置。
第2章 单自由度系统的自由振动
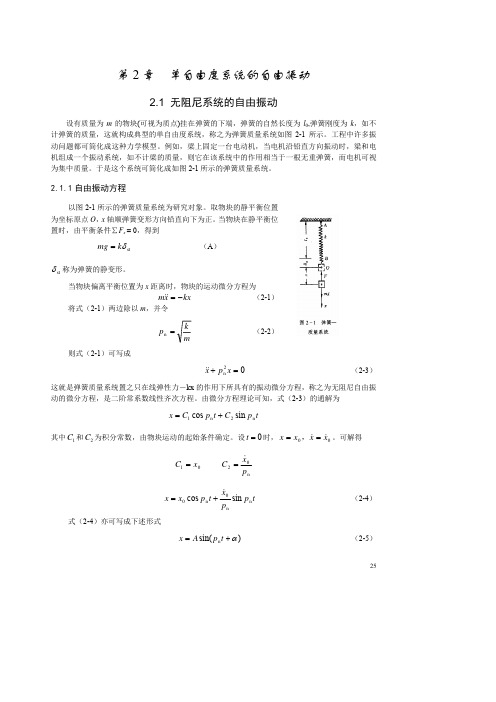
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。
单自由度系统的无阻尼自由振动固有频率

结论:在线性系统的振动分析中,可以忽略作
用于系统上的恒力及其引起的静态位移.
2.3 单自由度线性系统的无阻尼自由振动
燕山大学
Yanshan University
单自由度系统的运动微分方程: m x ( t) c x ( t) k( t) x F ( t)
自由振动:当F<t>=0时,系统所产生的振动.
2.1.2 阻尼器
阻尼器的性质:阻尼器在外力作用下的 响应为其端点产生一定的运动速度.
燕山大学
Yanshan University
阻尼器所产生的阻尼力Fd是速度的函数: Fd f(x) 阻尼力的方向和速度方向相反.
假设与说明: <1>假设阻尼器的质量忽略不计. <2>阻尼器消耗能量,以热能、声能等方式耗散系统的机械能.
由运动微分方程所要解决的问题: <1>由m、c、k所决定系统的固有特性; <2>在激励F<t>作用下,系统会具有什么样的响应,即x<t>=?
静位移对系统运动微分方程的影响
燕山大学
Yanshan University
当弹簧与阻尼器水平放置时,无重力影响.系 统静平衡位置与弹簧未伸长时的位置一致.
运动微分方程:m x (t) c x (t) k(t)x F (t)
图中,弹簧k1、k2是"共位移"的,为并联弹簧. 系统的等效刚度:keq=k1+ k2
是并联弹簧? 还是串联弹
簧?
弹簧串并联等效刚度实例
例2 确定图示混联弹簧的等效刚度.
解: k1、k2为并联,再与k3串联:
1 11
keq k1 k2 k3
keq
第一部分 单自由度系统的振动

x0 + ζω n x0 & , A = x0 + ωd
2 2
x = Ae
−ζω n t
sin (ω d t + ϕ )
得 x0 = A sin ϕ ,
& x0 + ζω n x0
ωd
= A cos ϕ
ωd x0 tgϕ = & x0 + ζω n x0
系统的势能为: 系统的势能为:
k2 k1 1 1 1 1 2 2 U = k1 x1 + k 2 x2 = k1 x + k2 x 2 2 2 2(k1 + k 2 ) 2 2(k1 + k 2 ) 1 k1k 2 1 2 = x = ke x 2 2 4(k1 + k 2 ) 2
第一部分 单自由度系统的振动 3 有阻尼系统的自由振动(小阻尼情况) 有阻尼系统的自由振动(小阻尼情况) ●响应求解 −ζωn t [ D1 cos ωd t + D2 sin ωd t ] 第二种形式 x = e 式中D 为待定常数,决定于初始条件。 式中 1与D2为待定常数,决定于初始条件。 由
x = e −ζωnt [ D1 cos ωd t + D2 sin ωd t ] & x = −ζωn e −ζωnt ( D1 cos ωd t + D2 sin ωd t )
+e
−ζωn t
( − D1ωd sin ωd t + D2ωd cos ωd t )
& x0 + ζωn x0
得 x0 = D1 ,
单自由度无阻尼自由振动

x n2 x 0
(2-2)
这是一个齐次二阶常系数线性微分方程,x est 是方程的特解,
把及 x s2est 代入(2-2)式中得: (s2 n2 )est 0 ,由于 est 0 ,否则位移为零没有意义。故有
S2 2 0
称为微分方程的特征方程,其特征根为
(2-4)
A ——振幅(最大振动位移);φ 0——初相位
角,rad;ωn ——振动系统的固有角频率(表示振 动快慢),rad/s
6
A D12 D22
0
arctan
D1 D2
n
k m
ωn:系统固有的数值特征,与系统是否正在振动着以 及如何进行振动的方式都毫无关系
A,:不是系统的固有属性的数字特征,与系统过去所
D1 cosnt D2 sinnt
(2-3)
5
式中
D1 c1 c2 , D2 i(c1 c2 )
D1,D2 由初始条件确定
(2-3)式表明:单自由度系统无阻尼自由振动包 含两个频率相同的简谐振动,从而合成一个简谐振 动。
可用下式表示
x A sin(nt 0 )
扭振微分方程式
I k 0 (2-4)
9
扭振的固有角频率
n
k I
式(2-4)与式(2-1)形式完全一致,可解得
Asin(nt 0 )
(2-5)
将振动的零时刻初始条件
t 0, 0 , 0
代入(2-5)中,得
A
2 0
02 n2
S in 式中 i 1 振动微分方程的通解
x c1eint c2eint 15
无阻尼单自由度体系的自由振动方程

无阻尼单自由度体系的自由振动方程无阻尼单自由度体系是指只有一个自由度的物理系统,在没有阻尼的情况下进行自由振动。
这种体系的自由振动方程可以用简单的数学公式来描述。
假设一个质量为m的物体通过一根弹簧与一个固定的支撑点相连。
当物体受到外力作用时,它会沿着弹簧的方向发生振动。
这种振动可以用一个自由度来描述,即物体相对于平衡位置的位移。
根据牛顿第二定律,物体的加速度与作用在它上面的力成正比。
在这种情况下,物体的加速度可以表示为:a = -kx/m其中,k是弹簧的劲度系数,x是物体相对于平衡位置的位移,m是物体的质量。
负号表示力的方向与位移方向相反。
根据运动学公式,物体的加速度可以表示为位移的二阶导数。
因此,上述方程可以改写为:d²x/dt² + (k/m)x = 0这就是无阻尼单自由度体系的自由振动方程。
它描述了物体在没有阻尼的情况下沿着弹簧方向进行自由振动的过程。
这个方程可以通过解微分方程来得到物体的振动解。
假设物体的初始位移为x0,初始速度为v0,则物体的振动解可以表示为:x = x0cos(ωt) + (v0/ω)sin(ωt)其中,ω是振动的角频率,可以表示为:ω = sqrt(k/m)这个公式告诉我们,角频率与弹簧的劲度系数和物体的质量有关。
当劲度系数越大或质量越小时,角频率越大,振动的周期越短。
无阻尼单自由度体系的自由振动方程是物理学中的基本方程之一。
它不仅可以用来描述弹簧振子的振动,还可以应用于其他物理系统的振动分析。
通过深入理解这个方程,我们可以更好地理解物理学中的振动现象,并为实际问题的解决提供有力的数学工具。
单自由度系统的无阻尼自由振动

A——物块离开平衡位置的最大位移,称为振幅。
n t + ——相位,决定振体在某瞬时 t 的位置
——初相位,决定振体运动的起始位置。
T
——周期,每振动一次所经历的时间。T
2 n
f —— 频率,每秒钟振动的次数, f = 1 / T 。
n —— 固有频率,振体在2秒内振动的次数。 反映振动系统的动力学特性,只与系统本身的固有参数有关。
根据:
xx0const x 0 nsinnt
其振动规律为:
x (t) v nsin tn 1 1 .6 * 1 * 9 5 6s 0 0 1 i0 .n 6 t9 1 .2s8 1 i.n 6 t9 (c)m
17
x(t)1.2s8i1n.9 6t(cm )
绳中的最大张力等于静张力 与因振动引起的动张力之和
11
无阻尼自由振动的特点是: (1) 振动规律为简谐振动;
(2) 振幅A和初相位 取决于运动的初始条件(初位移和初速度); (3)周期T 和固有频率 n 仅决定于系统本身的固有参数(m,k,I )。
四、其它
1. 如果系统在振动方向上受到某个常力的作用,该常力 只影响静平衡点O的位置,而不影响系统的振动规律,如振动 频率、振幅和相位等。
2
单自由度系统的自由振动
以弹簧质量系统为力学模型
3
运动过程中,总指向物体平衡位置的力称为恢复力。
物体受到初干扰后,仅在系统的恢复力作用下在其平衡位 置附近的振动称为无阻尼自由振动。
质量—弹簧系统:
令x为位移,以质量块的静平衡位置 为坐标原点,当系统受干扰时,根据 牛顿第二定律,有:
m x m k g (s x )
由Tmax=Umax , 求出 n
结构振动理论2-单自由度系统自由振动

由 dE 0 1、求出运动方程: mx kx 0
dt
有常力作用的机械能: E 1 mx&2 1 k( x)2 Fx
2
2
dE mx&&x& k( x)x& Fx& x&(m&x& kx) 0
dt
由 Ek max E p max E 2、求固有频率
假设 x Asin( pt ) 则 x Apcos(pt )
2
l 0
/
2
y02{3(
x l
)
4(
x l
)3}2
dx
1 2
0.486
ly02
Ek
1 2
me
y02
me 0.486 l
n
ke me
00:03
单自由度系统自由振动
例 铰接式直升机旋翼挥舞振动分析
取微元做受力分析,微元
cos
R
L
2(R cos)d 离心力对铰链轴o的力矩为
θ
ξ
(2 (R cos )d )( sin )
则系统的自由振动方程为: me ke 0
固有频率为:
n
ke me
需要注意的是,me不是梁的总质量,它可以通过梁上各 点位移关系和动能等效的原则求得。
00:03
单自由度系统自由振动
y( x, t )
y0
(t
)[3x l
4(
x )3 ] l
(x 1) l2
Ek
1 2
l y2dm 1 2
0
由此可见,弹性元件并联将提高总刚度,串联将降低总刚
度。这与电学中电阻的并联、串联结论是相反的。阻尼器串联
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T max Ts kA W kA 1.47 *105 5.78*104 *1.28 1.47 *105 0.74*105 2.21*105 N
可见动张力几乎是静张力的一半,由于
kA k v v km wn
因而为了降低动张力,应该降低系统的刚度 18
例2.2 图示的直升机桨 叶经实验测出其质量 为m,质心C距铰中心 O距离为l。现给予桨 叶初始扰动,使其微
幅摆动,用秒表测得
多次摆动循环所用的
时间,除以循环次数
获得近似的固有周期, 试求桨叶绕垂直铰O的 转动惯量。
O l
C
mg
19
解:取图示坐标系,将直升机桨叶视为一物 理摆,根据绕固定铰的动量矩定理得到其 摆动微分方程
ax cx 0
a, c是与系统的物理参数有关的常数。令
2 n
c/
a
则自由振动的微分方程的标准形式:
x n2 x 0
方程的通解解为:x Asin(nt )
7
或: x C1 cosnt C2 sin nt
C1,C2由初始条件决定 这里A和φ与C1和C2的关系为:
A c12 c22 tan1 c1
4
在静平衡时有:
mg ks
振动微分方程为:
mx mg k (s x)
mx kx
令 n2 k / m g / s
x n2x 0
方程的通解为:x Asin(nt )
5
x Asin(nt )
6
二、单自由度系统无阻尼自由振动微分方程及其解
对于任何一个单自由度系统,以x 为广义坐标(从平衡位 置开始量取 ),则自由振动的运动微分方程必将是:
Tn
2 n
2
m k
固有周期
k / m g / s 13
固有频率及固有周期
wn
k m
g
s
对于不易得到刚度或质量的系统, 若能测出静变形,可用上式计算固有频率。
14
15
解:
wn
k m
gk W
980*5.78*104 1.47 *105
19.6
重物匀速下降时处于静
平衡位置,若将坐标原点取在绳被卡住瞬时重物所 在位置,则t=0时有:
J 0 mgl sin
sin
J0 mgl 0
n
mgl ,
J0
Tn 2
J0 mgl
J0
mgl 42
Tn2
J c J 0 ml 2
O l
C
mg
20
例 2.3 一个质量为m的物体从h高处自由落下, 与一根抗弯刚度为EJ、长L的简支梁作完全非弹 性碰撞,不计梁的质量,求梁的自由振动的频 率和最大挠度。
2
单自由度系统的自由振动
以弹簧质量系统为力学模型
3
运动过程中,总指向物体平衡位置的力称为恢复力。
物体受到初干扰后,仅在系统的恢复力作用下在其平衡位 置附近的振动称为无阻尼自由振动。
质量—弹簧系统:
令x为位移,以质量块的静平衡位置 为坐标原点,当系统受干扰时,根据 牛顿第二定律,有:
mx mg k (s x)
——初相位,决定振体运动的起始位置。
T
——周期,每振动一次所经历的时间。T
2 n
f —— 频率,每秒钟振动的次数, f = 1 / T 。
n —— 固有频率,振体在2秒内振动的次数。
反映振动系统的动力学特性,只与系统本身的固有参数有关。
11
无阻尼自由振动的特点是: (1) 振动规律为简谐振动;
(2) 振幅A和初相位 取决于运动的初始条件(初位移和初速度); (3)周期T 和固有频率 n 仅决定于系统本身的固有参数(m,k,I )。
第二章 单自由度系统的自由振动
以弹簧质量系统为力学模型,讨论单自由度 无阻尼系统的固有振动和自由振动,
固有振动的表现形式为简谐振动,其固有频 率的计算方法有静变形法、、瑞利法以及等 效刚度、等效质量法
有阻尼的系统根据阻尼的大小分为过阻尼、临 界阻尼及欠阻尼三种状态
1
单自由度系统的自由振动
一、自由振动的概念:
22
23
24
§2 求系统固有频率的方法
1. 由2q 0
由Tmax=Umax , 求出 n
3. 瑞利法: n
g
st
st :集中质量在全部重力
作用下的静变形
4. 等效刚度法:
25
2. 能量法: 无阻尼自由振动系统为保守系统,机械能守恒。
当振体运动到距静平衡位置最远时,速度为零,即系统 动能等于零,势能达到最大值(取系统的静平衡位置为零势 能点)。
四、其它
1. 如果系统在振动方向上受到某个常力的作用,该常力 只影响静平衡点O的位置,而不影响系统的振动规律,如振动 频率、振幅和相位等。
12
固有频率及固有周期
n
k m
固有圆频率,为了方便也称 为固有频率,是系统的固有 特性,与系统是否振动无关
只与振动系统的弹簧常量k和物块的质量 m 有关, 而与运动的初始条件无关,所以称为固有频率。
当振体运动到静平衡位置时,系统的势能为零,动能达 到最大值。
如:
U max
1 2
k( A st )2
1 2
k st 2
mgA
k st mg
U max
1 kA2 2
26
Tmax
1 2
mx
2
1 2
mA2
2 n
由 Tmax U max
x0 0
x0 v
其振动规律为:
x
x0
cos nt
x0
n
sin
nt
16
因为:
x0 0 x0 v
根据:
x
x0
cos nt
x0
n
sin
nt
其振动规律为:
x(t)
v
n
sin nt
15*100 sin19.6t 19.6 * 60
1.28sin19.6t
(cm)
17
x(t) 1.28sin19.6t (cm)
M
x
21
解:
M
由材料力学可知简支梁在
重物mg作用下的静变形为:
s
mgl 3 48EJ
x
故自由振动频率为:
wn
g
s
48EJ ml 3
以梁受重时平衡位置为坐标原点,以撞击时为0时候
x0 s, x0 2gh
则自由振动振幅为: A
x0
( x0 wn
)2
梁的最大挠度为: max A s
s 2 2gh
c2
8
x C1 cosnt C2 sin nt
设 t = 0 时,x x0 , x x0 则可求得:
C1 x0 , C2 x0 / n
x
x0
cos nt
x0
n
sin
nt
A
x02
x02
n2
,
arctg
n x0
x0
9
10
三、自由振动的特点:
A——物块离开平衡位置的最大位移,称为振幅。
n t + ——相位,决定振体在某瞬时 t 的位置