多目标跟踪雷达
雷达系统中的多目标跟踪算法性能评估

雷达系统中的多目标跟踪算法性能评估引言在雷达系统中,多目标跟踪算法对于有效的目标检测和跟踪至关重要。
随着雷达技术的快速发展,多目标跟踪算法也呈现出不断提高的趋势。
本文将深入探讨雷达系统中的多目标跟踪算法性能评估的方法和技术,以帮助研究人员和工程师们更好地评估和改进算法的性能。
1. 多目标跟踪算法的概述多目标跟踪算法是指通过使用雷达系统的输入数据,对多个目标进行检测、跟踪和预测的算法。
该算法通常有三个主要步骤:目标检测、数据关联和状态估计。
目标检测的目的是识别并定位出所有存在的目标,数据关联则是通过匹配目标在连续帧之间的轨迹,以确定目标的运动轨迹,最后通过状态估计来预测目标的位置。
2. 多目标跟踪算法性能评估的指标为了评估多目标跟踪算法的性能,我们可以使用以下指标:2.1 检测精度检测精度是指算法能够准确识别和定位目标的能力。
常用的指标包括准确率、召回率和F1分数等。
2.2 跟踪精度跟踪精度是指算法能够正确跟踪目标并预测其位置的能力。
常用的指标包括平均跟踪误差、重叠率和重叠跟踪成功率等。
2.3 多目标处理能力多目标处理能力是指算法在同时处理多个目标时的效率和稳定性。
常用的指标包括处理速度、目标数量和系统稳定性等。
3. 多目标跟踪算法性能评估的方法为了评估多目标跟踪算法的性能,常用的方法包括仿真实验和实际测试。
3.1 仿真实验仿真实验是一种通过模拟雷达系统输入数据来评估算法性能的方法。
通过使用已知的真实轨迹和合成的雷达数据,可以对算法在不同情境下的表现进行评估。
在仿真实验中,可以根据需要对算法的参数进行调整以获得最佳性能。
3.2 实际测试实际测试是指在真实环境中使用实际雷达系统进行算法性能评估的方法。
通过收集真实场景下的雷达数据并使用算法进行目标检测和跟踪,可以评估算法在实际应用中的性能。
这种方法更接近实际应用,但受到数据获取的困难和成本的限制。
4. 多目标跟踪算法性能评估的挑战在评估多目标跟踪算法的性能时,仍然存在一些挑战和困难。
飞机场地面雷达设备的布局与应用

飞机场地面雷达设备的布局与应用飞机场地面雷达设备是航空管理和安全运行的关键组成部分,它们负责监测和控制飞机在地面的移动和停放。
本文将探讨飞机场地面雷达设备的布局与应用,以便更好地理解和利用这些关键设备。
一、雷达设备的布局为了实现对飞机在地面的精确监测和控制,雷达设备的布局至关重要。
通常,飞机场地面雷达系统包括以下几种设备:面积雷达、多目标跟踪雷达和防碰撞雷达。
1. 面积雷达面积雷达负责监测飞机场的整个区域,用于检测靠近飞机场的飞行器和其他移动物体。
它通常被放置在飞机场附近的指定高处,以获得更广泛的侦测范围。
面积雷达通过发送和接收无线电波,实时监测并提供目标物体的距离、高度和速度等信息。
2. 多目标跟踪雷达多目标跟踪雷达的主要任务是,根据面积雷达提供的目标物体信息,精确追踪飞机的位置和移动轨迹。
它可以有效地跟踪多个目标和高速运动的飞机,并提供实时数据给航管人员,以协助决策和避免碰撞。
3. 防碰撞雷达防碰撞雷达主要用于监测飞机和地面车辆之间的安全间隔。
它会发出警报或提醒,以确保飞机在地面停放期间不会发生碰撞事故。
防碰撞雷达通常装置在飞机的机身底部或附近,以获得最佳监测效果。
二、雷达设备的应用飞机场地面雷达设备的应用范围广泛,不仅仅局限于飞机监测和控制,还包括了以下几个方面:1. 地面运营控制飞机场地面雷达设备提供了实时的飞机位置和移动轨迹数据,这对于地面运营控制至关重要。
航管人员可以准确把握飞机的接近情况,合理安排出入口的使用、跑道的分配以及地面车辆的调度。
这有助于提高地面运营效率,减少飞机起降时间以及地面拥堵。
2. 碰撞预防和安全管理飞机场地面雷达设备的防碰撞功能是确保飞机停放期间的重要手段。
通过监测飞机和地面车辆之间的安全间隔,防碰撞雷达可以及时发出警报或提醒。
这有助于减少碰撞事故的发生,保障飞机和人员的安全。
3. 跑道使用和飞机起降控制雷达设备的高精度监测和控制功能,使得航管人员能够更好地协调和控制飞机的起降流程。
多目标雷达
多目标雷达多目标雷达是一种能够同时监测和追踪多个目标的雷达系统。
与传统的单目标雷达系统相比,多目标雷达可以实现对多个目标同时进行跟踪,具有更高的监测和追踪能力,因此在军事和民用领域都有着广泛的应用。
多目标雷达系统通常由雷达传感器和信号处理系统组成。
雷达传感器负责发射雷达信号并接收目标反射回来的信号,而信号处理系统则对接收到的信号进行处理,提取出目标的信息。
多目标雷达主要有两种工作模式,一种是跟踪模式,用于追踪已经被探测到的目标;另一种是搜索模式,用于探测新的目标。
多目标雷达的最大特点是具有多个波束,可以同时对多个目标进行监测和追踪。
每一个波束都可以独立地控制方向和射频参数,因此可以在不同的方向上同时进行监测。
与传统的单目标雷达相比,多目标雷达可以极大地提高监测效率,并且能够避免目标重叠和干扰的问题。
多目标雷达通常采用数字波束形成技术,能够根据目标的位置和速度信息,将雷达波束的方向和射频参数进行实时调整,从而实现对多个目标的追踪。
通过使用自适应波束形成算法,多目标雷达能够自动识别和跟踪目标,并实现动态分配波束资源的功能。
多目标雷达在军事上的应用非常广泛,特别是在防空和导弹防御系统中。
多目标雷达可以实时监测和追踪多个敌方飞机或导弹,从而提供准确的目标信息,为防御系统提供及时的反应和应对措施。
而在民用领域,多目标雷达则常用于空中交通管制和海上巡航控制等方面。
通过实时监测和追踪飞机和船只的位置和速度,多目标雷达可以有效地提高航空和海上交通的安全性。
总而言之,多目标雷达是一种具有多个波束和自适应波束形成功能的雷达系统,能够同时监测和追踪多个目标。
它的应用范围广泛,不仅在军事上具有重要作用,还在民用领域有着广泛的应用前景。
随着技术的不断发展,多目标雷达将会越来越成熟和普及,为我们的生活和工作提供更多的便利和安全。
雷达目标跟踪
雷达目标跟踪雷达目标跟踪是一种用雷达技术对目标进行实时跟踪的方法。
雷达目标跟踪的主要目的是精确地确定目标的位置、速度和轨迹,以及目标的识别和分类。
在雷达目标跟踪中,首先要通过雷达系统对目标进行探测和测量。
雷达系统通过向目标发送微波信号,接收目标反射回来的信号,并根据接收到的信号特性来确定目标的位置和速度。
雷达系统通常采用脉冲雷达或连续波雷达来实现目标探测和测量。
一旦目标被探测到并测量出来,接下来就需要对目标进行跟踪。
雷达目标跟踪涉及到目标的预测、关联和更新等步骤。
目标的预测是基于目标的历史观测数据和运动模型,通过预测目标的位置和速度来估计目标的未来状态。
目标的关联是将当前观测到的目标与之前预测的目标进行匹配,以确定目标的唯一身份。
目标的更新是根据最新观测数据对目标的状态进行修正和更新。
雷达目标跟踪的核心是数据关联算法。
数据关联算法通过将目标的观测数据与之前的预测数据进行比较和匹配,来确定目标的身份和轨迹。
常用的数据关联算法有最近邻关联算法、最小生成树关联算法和卡尔曼滤波算法等。
在雷达目标跟踪中,还要考虑到一些复杂的情况,如多目标跟踪、目标交叉和遮挡等。
多目标跟踪是指在雷达系统中存在多个目标需要同时进行跟踪的情况,需要解决多个目标的数据关联和轨迹预测问题。
目标交叉是指当多个目标同时靠近或重叠在一起时,需要通过解相关和模糊表示等方法来分离和识别各个目标。
目标遮挡是指当目标被遮挡或部分遮挡时,需要通过目标的背景和其他目标的信息来进行目标识别和跟踪。
总之,雷达目标跟踪是一种用雷达技术对目标进行实时跟踪的方法,可以精确地确定目标的位置、速度和轨迹。
它涉及到目标的探测、测量、预测、关联和更新等过程,需要应用数据关联算法和解相关技术来解决多目标跟踪、目标交叉和遮挡等问题。
雷达目标跟踪在军事、航空、交通和安防等领域具有广泛的应用前景。
雷达信号处理中的多目标跟踪算法研究

雷达信号处理中的多目标跟踪算法研究雷达信号处理是一门重要的技术,其应用范围广泛,可以用于目标识别、导航、探测和跟踪等领域。
而多目标跟踪算法则是其中的一个热点研究领域。
本文将从多目标跟踪算法的定义、算法种类、应用以及研究进展等多个方面进行论述。
一、多目标跟踪算法的定义多目标跟踪算法是指利用雷达信号处理技术对多个目标进行跟踪、定位、预测和识别的算法。
多目标跟踪算法的研究主要涉及到多个目标的特征提取、多个目标的数据关联和多个目标的运动轨迹预测等关键问题。
二、多目标跟踪算法的种类现在多目标跟踪算法的研究方向越来越多,聚类跟踪算法、批处理跟踪算法、传统滤波跟踪算法、无滤波跟踪算法、模型预测跟踪算法等多种算法已经被提出。
其中,聚类跟踪算法和批处理跟踪算法是较为常用的算法。
聚类跟踪算法是指在雷达扫描范围内针对所有目标的特征信息进行空间聚类,并确定目标数目。
这种算法将时间和空间信息相结合,能够获得非常准确的结果,但是难以实现实时性。
而批处理跟踪算法则是通过信息提取、特征关联、轨迹预测等步骤来实现目标跟踪。
该算法主要通过运用卡尔曼滤波和粒子滤波的方法,来对目标进行跟踪和预测,以期提高目标跟踪的精度和实时性。
三、多目标跟踪算法的应用多目标跟踪算法广泛应用于军事领域、航空航天、交通管制、环境监测、自动驾驶等众多领域。
例如军事领域中,雷达系统需要对附近的各类目标进行跟踪,通过多目标跟踪算法,能够快速确定目标位置、类型等重要信息,并对敌方目标进行监测。
在航空航天领域,多目标跟踪算法能够将飞行器上的雷达数据进行有效处理,实现对众多空中目标的探测和追踪。
在交通管制中,多目标跟踪算法则可以用于市场调研和广告投放等领域,以及城市交通流量的监测与分析等方面。
四、多目标跟踪算法的研究进展近年来,多目标跟踪算法的研究进展非常迅速。
基于卡尔曼滤波理论的多目标跟踪算法,以及基于数据驱动的深度学习算法已经成为该领域的研究热点。
卡尔曼滤波理论在多目标跟踪算法研究中应用广泛,同时,基于卡尔曼滤波理论的多目标跟踪算法的精度和速度也得到了精细化的提升。
基于多普勒雷达的目标识别与跟踪技术研究

基于多普勒雷达的目标识别与跟踪技术研究引言:多普勒雷达是一种能够实时监测和跟踪目标运动状态的重要工具。
在现代军事、民用航空和交通管理等领域,多普勒雷达的应用日益广泛。
通过利用多普勒效应,多普勒雷达可以通过测量目标返回的雷达信号频率变化,精确地计算目标的运动状态和速度,从而实现目标的识别和跟踪。
本文将重点研究基于多普勒雷达的目标识别与跟踪技术,探讨其原理、方法和应用。
一、多普勒雷达原理多普勒效应是物理学中的一个基本原理,它描述了当一个物体相对于观察者运动时,物体的频率会发生变化。
多普勒雷达利用这一原理来识别目标的运动状态。
多普勒雷达在发射脉冲信号后,通过接收目标返回的回波信号,测量信号频率的变化。
根据多普勒效应,当目标向雷达靠近时,回波信号频率会增大;当目标远离雷达时,回波信号频率会减小。
通过计算回波信号频率的变化,可以确定目标的运动速度和方向。
二、多普勒雷达目标识别技术1. 频谱分析法频谱分析法是一种基于频谱特征的目标识别技术。
通过分析回波信号的频谱特征,可以确定目标的速度。
当目标的速度超过雷达系统的测量范围时,回波信号的频谱将出现模糊,难以识别。
因此,频谱分析法在目标速度较小的情况下应用较为广泛。
2. 脉冲压缩技术脉冲压缩技术是一种通过增加脉冲信号的带宽来提高雷达分辨率的方法。
通过将发射的脉冲信号与接收到的回波信号进行相关运算,可以实现对目标的高分辨率识别。
脉冲压缩技术可以有效地识别高速运动目标。
3. 频域分析法频域分析法是一种基于频域特征的目标识别技术。
通过将回波信号转换到频域,可以获得目标的频谱特征。
不同目标由于尺寸、材料和运动状态的不同,其频域特征也会有所差异。
通过对比目标的频域特征和参考库中的特征,可以实现目标的识别和分类。
三、多普勒雷达目标跟踪技术1. 单目标跟踪技术单目标跟踪技术是一种基于目标运动特征的跟踪方法。
通过计算目标的速度和方向,可以预测目标的运动轨迹,并实时更新目标的位置信息。
二次雷达应答机的多目标跟踪算法研究
二次雷达应答机的多目标跟踪算法研究在现代雷达系统中,多目标跟踪是其中一个重要的研究领域。
而对于二次雷达应答机,多目标跟踪算法的研究同样具有重要意义。
本文将针对二次雷达应答机的多目标跟踪算法进行深入研究和分析。
首先,我们需要了解什么是二次雷达应答机。
二次雷达应答机是一种被动式雷达系统,它通过接收来自搜索雷达的信号来获得目标的信息,然后对这些目标进行探测、识别和测量。
相比于主动式雷达系统,二次雷达应答机具有成本低、体积小、功耗低的优势。
而在多目标跟踪中,我们的目标是通过收集多个雷达回波信号来确定目标的位置、速度和航向。
然而,在二次雷达应答机中,由于只能接受到搜索雷达发射的信号,我们面临着一些挑战。
例如,由于接收信号的功率较低,目标的回波信号可能被噪声干扰所掩盖。
此外,在接收信号时,我们只能得到目标的峰值信号,而无法得到其他与目标有关的信息。
因此,为了实现在二次雷达应答机中的多目标跟踪,我们需要设计一种有效的算法。
下面将介绍一些常用的多目标跟踪算法,并分析其在二次雷达应答机中的适用性。
第一种常用的多目标跟踪算法是卡尔曼滤波器。
卡尔曼滤波器是一种能够预测和校正目标状态的递归估计算法。
它通过使用系统动力学模型和测量模型来对目标状态进行估计。
然而,在二次雷达应答机中,由于无法获取目标的动力学信息,卡尔曼滤波器的性能会受到限制。
另一种常用的多目标跟踪算法是粒子滤波器。
粒子滤波器通过使用一组代表目标状态的粒子来估计目标的状态。
它可以通过使用观测信息来更新粒子的权重,并通过对权重进行重采样来实现目标状态的估计。
相比于卡尔曼滤波器,粒子滤波器具有更强的适应性和鲁棒性,能够应对更复杂的目标动态模型。
然而,在二次雷达应答机中,由于无法获取目标的动力学信息,粒子滤波器也会受到一定限制。
基于以上分析,针对二次雷达应答机的多目标跟踪算法,我们可以考虑以下几个方向:首先,我们可以通过提高接收信号的灵敏度来提升多目标跟踪的性能。
基于路侧激光雷达的交通多目标跟踪与信息提取技术研究

多目标跟踪与信息 提取的挑战与重要 性
研究现状与挑战
激光雷达在交通领域的应用现 状
多目标跟踪与信息提取的技术 发展及瓶颈
数据关联与过滤、目标跟踪算 法、场景解析与语义信息提取
等关键技术的挑战
研究内容与方法
研究的主要内容
包括数据预处理、多目标跟踪算法设计、场景解析与语义信息提取等
采用的研究方法
深度学习、机器学习、图像处理、数据挖掘等
该技术可以广泛应用于城市道路、高速公路、停车场等场景中,提高交 通运营效率和管理水平,保障交通安全。
通过推广和应用该技术,可以带来显著的社会效益和经济效益,为智能 交通领域的发展提供有力支持。
THANKS
感谢观看
பைடு நூலகம்
目标检测与跟踪算法
01
02
03
目标检测
通过对预处理后的点云数 据进行分割、聚类等操作 ,检测出道路上的车辆、 行人等目标。
特征提取
对检测到的目标进行特征 提取,如形状、大小、运 动轨迹等,以区分不同目 标类型。
目标跟踪
利用目标检测和特征提取 的结果,采用跟踪算法对 目标进行连续跟踪,如多 目标跟踪、航迹关联等。
卡尔曼滤波算法的优点是精度高、计算量小,适用于实 时处理。但是,对于非线性系统,卡尔曼滤波算法需要 进行扩展或变形处理,这可能导致计算量增加。
粒子滤波算法
粒子滤波算法是一种基于贝叶斯统计 的滤波算法,通过随机采样和重要性 重抽样实现对运动目标的跟踪。在多 目标跟踪中,粒子滤波算法可以处理 多个目标的运动状态和相互之间的关 联。
目前算法主要针对静态目标进行识别和跟踪,对于动态目标的跟踪性能还有待提高,可以进一步研究 基于动态目标跟踪的算法。
雷达导航系统中的目标跟踪算法研究

雷达导航系统中的目标跟踪算法研究随着雷达技术的快速发展,雷达导航系统在军事、民用以及交通领域等方面的应用越来越广泛。
目标跟踪算法作为雷达导航系统中的核心环节,对系统的性能和可靠性起着至关重要的作用。
本文将对雷达导航系统中的目标跟踪算法进行研究,旨在提出一种高效准确的目标跟踪算法,以满足系统在复杂环境中的要求。
目标跟踪在雷达导航系统中的作用非常重要,主要用于实时检测目标物体的位置、速度和运动轨迹,从而及时进行安全预警和避障控制。
在常见的雷达导航系统中,目标跟踪算法主要包括单目标和多目标两种情况。
针对单目标情况,常用的目标跟踪算法包括卡尔曼滤波算法、扩展卡尔曼滤波算法以及粒子滤波算法。
针对多目标情况,常用的目标跟踪算法包括多普勒跟踪算法、多假设跟踪算法和级联跟踪算法。
在单目标目标跟踪算法中,卡尔曼滤波算法是最为经典的方法之一。
它基于随机变量的贝叶斯滤波理论,通过对目标物体的状态进行预测和修正,并利用系统的观测信息进行更新,实现对目标位置和速度的准确估计。
扩展卡尔曼滤波算法在卡尔曼滤波算法的基础上考虑了非线性问题,其鲁棒性和准确性更高,但计算复杂度也更高。
粒子滤波算法则借助一系列离散的粒子来表示目标的状态空间,通过重采样和权重更新等操作,实现对目标轨迹的估计。
这些算法在目标跟踪中都有着很好的效果,但也存在着一定的局限性,如对目标速度突变和噪声扰动的敏感性较高。
在多目标跟踪算法中,多普勒跟踪算法是非常常用的方法之一。
它通过测量目标物体的多普勒频移来实现对目标速度的估计,进而实现目标位置和轨迹的估计。
多假设跟踪算法则通过对多个可能的目标位置进行假设,并根据观测信息的置信度对假设进行验证和更新,从而实现对多目标的跟踪。
级联跟踪算法将多目标跟踪问题分解为多个单目标跟踪问题,通过级联关系的建立和更新,实现对多目标的跟踪和估计。
这些算法对于复杂背景下的多目标跟踪具有很好的效果,但也存在着对目标数目和目标运动模型的限制。
双基地MIMO雷达多目标高精度跟踪算法
双基地MIMO雷达多目标高精度跟踪算法张正言;张剑云【摘要】针对双基地多输入多输出(multiple-input multiple-output,MIMO)雷达自适应非对称联合对角化(adaptive asymmetric joint diagonalization,AAJD)跟踪算法在低信噪比时失效的问题,提出一种双基地MIMO雷达高精度跟踪算法.首先,针对低信噪比时AAJD算法信号子空间扩展问题,利用主成分顺序估计原理求出特征值,根据特征值的大小对导向矢量进行排序,得到更加精确的信号子空间.其次,根据跟踪状态的不同,将多目标分类(multiple signal classification,MUSIC)算法分为两步:第一步全空域大步长扫描,对应跟踪非稳定状态;第二步小空域小步长扫描,对应跟踪稳定状态,空域范围由上一时刻估计角度和运动速度确定,并将峰值搜索过程变为取最大值操作,降低了计算量.算法解决了低信噪比时信号子空间扩展问题,提高了跟踪性能,且采用了性能更高的MUSIC算法,并对其进行改进,降低了计算量.仿真结果证明了算法的有效性.【期刊名称】《系统工程与电子技术》【年(卷),期】2018(040)006【总页数】8页(P1241-1248)【关键词】双基地多输入多输出雷达;角度跟踪;多目标分类;高精度;扩展信号子空间【作者】张正言;张剑云【作者单位】国防科技大学电子对抗学院,安徽合肥230037;国防科技大学电子对抗学院,安徽合肥230037【正文语种】中文【中图分类】TN9580 引言阵列雷达通过综合利用空间和时间信息处理技术提高了估计性能,多输入多输出(multiple-input multiple-output,MIMO)雷达进一步发展了这种技术,取得了更大的优势,属于新的雷达体制[1]。
与传统的相控阵雷达不同之处在于MIMO雷达各个发射天线的信号是正交的,而相控阵雷达则是相关的,因此MIMO雷达拥有空间分集,波形分集等优势,等效于拥有更多的阵元,能够探测更多的目标[2-5]。
交通场景毫米波监视雷达多目标跟踪算法研究
交通场景毫米波监视雷达多目标跟踪算法研究近年来,随着社会的发展和人口的增加,交通场景变得越来越拥堵,交通安全问题也日益突显。
为了解决这一问题,毫米波监视雷达多目标跟踪算法应运而生。
本文将对这一算法进行研究分析,并探讨其在交通场景中的应用。
首先,我们来了解什么是毫米波监视雷达多目标跟踪算法。
毫米波雷达是一种通过发射和接收毫米波信号来探测和跟踪目标的技术。
相较于传统的雷达技术,毫米波雷达能够提供更高的分辨率和更精准的测量结果。
毫米波监视雷达多目标跟踪算法则是基于这一技术,通过对多个目标进行跟踪和预测,实现对交通场景中车辆、行人等目标的监测和控制。
毫米波监视雷达多目标跟踪算法的关键在于目标的检测和跟踪。
目标检测是通过对雷达信号进行处理和分析,识别出目标的位置、速度以及其他特征。
而目标跟踪则是在目标检测的基础上,根据目标的历史轨迹和动态信息,预测目标未来的位置和轨迹。
这一算法能够同时对多个目标进行跟踪和预测,实现对交通场景中多个目标的实时监测和预警。
在交通场景中,毫米波监视雷达多目标跟踪算法有着广泛的应用前景。
首先,它可以用于交通流量统计和分析。
通过对所有目标的跟踪和轨迹分析,可以准确地获取交通流量、车速以及车辆行驶的轨迹等信息,为交通管理和规划提供重要参考。
其次,它可以用于交通事故预警和处理。
通过对交通场景中的目标进行实时跟踪和预测,当目标发生异常行为或潜在危险时,可以及时发出预警,并采取相应的措施,避免交通事故的发生。
再次,它可以用于交通信号控制和调度。
通过对所有目标的跟踪和动态信息的分析,可以对交通信号进行智能控制,实现交通流的优化和调度。
然而,毫米波监视雷达多目标跟踪算法也存在一些挑战和问题。
首先,由于交通场景中目标复杂多样,目标检测和跟踪的准确性和稳定性较低。
其次,交通场景中目标的数量庞大且动态变化,需要实时高效地进行目标的跟踪和预测。
最后,交通场景中的目标存在遮挡、干扰等问题,需要通过深入的信号处理和算法优化来解决。
毫米波雷达多目标跟踪算法

毫米波雷达多目标跟踪算法1. 简介毫米波雷达是一种利用毫米波频段进行探测和测距的雷达系统。
由于其具有高分辨率、强穿透能力和不受天气影响等优点,被广泛应用于无人驾驶、智能交通系统、安防监控等领域。
而多目标跟踪算法则是在毫米波雷达系统中实现对多个目标进行准确跟踪的关键技术。
本文将详细介绍毫米波雷达多目标跟踪算法的原理、方法和应用,并探讨其在实际场景中的挑战和发展方向。
2. 算法原理2.1 毫米波雷达工作原理毫米波雷达通过发射连续或脉冲信号,并接收回波信号来实现对目标的探测和测距。
其工作频段通常为30 GHz到300 GHz之间,相比于传统的微波雷达,具有更高的分辨率和精度。
2.2 多目标跟踪算法基本原理多目标跟踪算法主要包括目标检测和目标关联两个步骤。
目标检测用于在雷达数据中识别出可能存在的目标,而目标关联则是将连续的雷达帧之间的目标进行匹配,实现对目标轨迹的跟踪。
通常,多目标跟踪算法可以分为基于滤波器的方法和基于数据关联的方法。
滤波器方法通过状态估计器(如卡尔曼滤波器或粒子滤波器)对每个目标进行预测和更新,从而实现对目标轨迹的跟踪。
而数据关联方法则通过将当前帧中的目标与上一帧中已知的目标进行匹配,根据匹配结果更新或创建新的轨迹。
3. 算法方法3.1 目标检测在毫米波雷达数据中进行目标检测是多目标跟踪算法的第一步。
常用的方法包括基于阈值、基于模型和基于深度学习等。
•基于阈值:通过设定一个合适的阈值来判断雷达数据中是否存在可能的目标。
该方法简单快速,但容易受到噪声和杂散回波的影响。
•基于模型:利用目标在雷达数据中的特征模型进行匹配,如目标的形状、尺寸和速度等。
该方法对目标的形状和尺寸有一定要求,但能够提供更准确的目标检测结果。
•基于深度学习:利用深度神经网络对雷达数据进行特征提取和目标分类。
该方法需要大量标注数据进行训练,但在目标检测准确率上通常能够超过传统方法。
3.2 目标关联目标关联是多目标跟踪算法的核心部分。
相控阵雷达多目标跟踪下的资源优化与资源管理方法研究
相控阵雷达多目标跟踪下的资源优化与资源管理方法研究相控阵雷达由于其高性能和多功能已成为雷达技术发展方向上的一个重要里程碑。
相控阵雷达波束的形成和定位只需几微秒的时间,使得几百个波束可以在一秒内产生,这些波束用于对目标进行跟踪和搜索。
同时雷达还处理天线接收到的回波,这样雷达就可以同时对多个目标进行多种操作。
由于雷达处于不同的工作方式,对雷达资源的消耗各不相同。
所以,怎样合理地调度与使用有限的雷达资源将直接关系到相控阵雷达突出优势的发挥。
本文围绕多目标跟踪下相控阵雷达的资源优化以及资源管理分别展开了相关研究。
主要工作如下:1.研究了多目标跟踪时的资源优化问题。
由于相控阵雷达跟踪多目标时,通常采用分时多波束的工作模式,因此资源优化主要是指对不同目标照射时间的优化分配。
根据目标的状态估计信息,以目标的总体跟踪性能最优作为代价函数,对雷达在各个目标方向上的照射时间进行优化,优化问题的最优解即为雷达在各目标所在方向上的照射时间。
仿真实验说明该方法可以改善目标的总体跟踪精度。
2.研究了多目标跟踪时的资源管理问题,即如何在多个跟踪任务以及搜索任务之间有效地调度相控阵雷达的波束。
换句话说,相控阵雷达在完成该时刻的任务后,要确定下一时刻的工作方式(搜索还是跟踪),就跟踪方式而言,对哪个目标进行跟踪也是一个需要进一步确定的信息。
解决资源管理问题主要有基于信息论的方法和基于协方差控制的方法。
本文将两种方法的思想相结合研究了一种改进算法,针对有特殊要求的目标按照期望跟踪精度进行跟踪,针对剩余其他没有要求的目标依照信息增量进行跟踪。
通过仿真实验说明了该方法的优点。
期望跟踪精度是根据目标的威胁度进行设置的。
针对动态变化的目标环境,根据专家知识和雷达回波获取的目标特性的先验知识,本文研究了基于层次——效益法的目标威胁度确定方法。
通过仿真实验证实它的决策结果符合人们一般思考的结果,是一种有效的方法。
多目标跟踪雷达
多目标跟踪雷达多目标跟踪雷达是一种广泛应用于航空、军事和交通领域的设备,它能够同时追踪多个目标并提供准确的位置和速度信息。
在本文中,我将详细介绍多目标跟踪雷达的原理、应用和优势。
多目标跟踪雷达是一种主动传感器,它使用雷达波束扫描技术,通过发射和接收雷达信号来探测目标物体。
其原理是利用雷达波束的扫描模式,对周围物体进行连续的扫描,然后根据接收到的反射信号来确定目标物体的位置和速度。
有几种不同的扫描模式可用,包括机械式扫描和电子扫描。
在多目标跟踪雷达技术中,有两个主要的挑战:目标检测和目标跟踪。
目标检测是指识别传感器所接收到的信号中的目标物体。
目标跟踪是指在目标检测之后,根据目标物体的位置和速度信息,跟踪目标物体的运动轨迹。
为了更准确地跟踪目标物体,多目标跟踪雷达通常使用一些算法和技术,如卡尔曼滤波器、粒子滤波器和相关滤波器。
多目标跟踪雷达在许多领域都有广泛的应用。
在航空领域,它可以用于飞机的流量管理和自动化的着陆系统。
在军事领域,它可以用于雷达干扰和目标定位。
在交通领域,它可以用于智能交通系统和车辆自动驾驶技术中的障碍物检测和定位。
此外,多目标跟踪雷达还可以应用于安防系统和天气预报等。
多目标跟踪雷达相比其他传感器有许多优势。
首先,它能够同时跟踪多个目标物体,提供更全面的信息。
其次,它具有较高的精度和准确性,可以提供目标物体的准确位置和速度信息。
此外,多目标跟踪雷达具有较高的鲁棒性和抗干扰能力,能够在复杂的环境中正常工作。
综上所述,多目标跟踪雷达是一种广泛应用于航空、军事和交通领域的设备,它能够同时跟踪多个目标物体并提供准确的位置和速度信息。
通过使用不同的扫描模式和跟踪算法,多目标跟踪雷达能够应对各种复杂的环境和任务要求。
它的应用领域非常广泛,为许多领域的发展和进步做出了重要贡献。
雷达系统中的信号处理和目标跟踪研究

雷达系统中的信号处理和目标跟踪研究雷达系统是一种重要的电子信息技术,不仅在军事领域有广泛应用,也在民用领域有诸如天气预报、空管航标、地震测量等方面的重大作用。
波束形成、信号处理和目标跟踪是雷达系统的三个基本环节,其中信号处理和目标跟踪是实现雷达探测和跟踪目标的关键环节。
本文将探讨雷达系统中的信号处理和目标跟踪研究。
一、信号处理信号处理是雷达系统中最核心的部分,其主要任务是将雷达返回的混杂信号进行分离、滤波、解调处理,提取出目标信息并进行分析和处理。
在信号处理中,建立了许多经典的算法和技术,如离散傅里叶变换(DFT)、快速傅里叶变换(FFT)等。
这些算法能够快速地将雷达接收到的信号进行频谱分析和频率域处理,从而提高系统性能。
此外,滤波技术也是信号处理中不可或缺的一部分,在信号处理过程中,常用的滤波技术包括数字滤波器、无限脉冲响应(IIR)滤波器和有限脉冲响应(FIR)滤波器等。
这些技术的运用可以降低噪声干扰、提高信噪比和检测距离等指标,从而提高雷达系统的性能。
二、目标跟踪目标跟踪是雷达系统中的另一个重要环节,它的主要任务是通过对目标信息的获取和处理,准确地估计目标的位置、速度和运动轨迹,实现对目标的跟踪。
目标跟踪技术可以分为单目标跟踪和多目标跟踪两种模式。
在单目标跟踪中,系统只跟踪一个目标,并从中提取出目标的位置、速度等信息;而在多目标跟踪中,系统需要同时跟踪多个目标,并在跟踪过程中对它们进行区分,以便于后续处理和分析。
在目标跟踪中,常用的算法包括卡尔曼滤波、粒子滤波、扩展卡尔曼滤波等。
卡尔曼滤波是一种递归算法,结合数学模型、噪声模型和观测数据,可以对目标状态进行估计,从而实现目标跟踪。
粒子滤波则是通过采用一组粒子来近似表示目标状态,利用贝叶斯定理和重要性采样算法计算目标的概率密度函数,从而实现目标跟踪。
扩展卡尔曼滤波则是一种对非线性系统建模的滤波算法,通过建立非线性状态空间模型,将目标状态进行估计,从而实现目标跟踪。
基于激光雷达的无人驾驶3D多目标跟踪
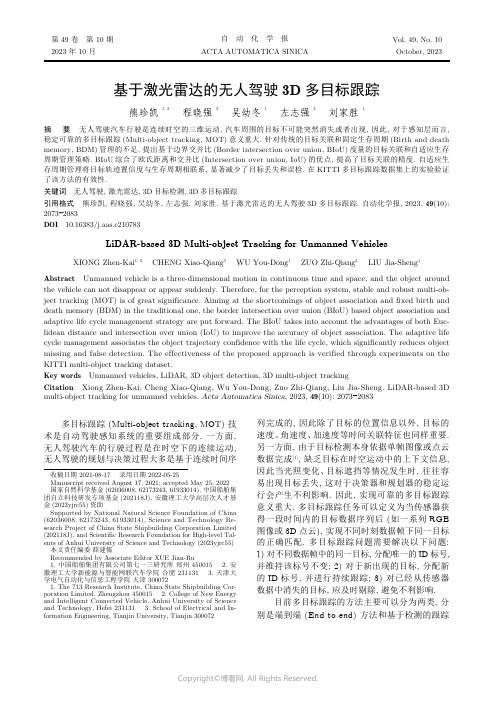
基于激光雷达的无人驾驶3D 多目标跟踪熊珍凯 1, 2程晓强 3吴幼冬 1左志强 3刘家胜1摘 要 无人驾驶汽车行驶是连续时空的三维运动, 汽车周围的目标不可能突然消失或者出现, 因此, 对于感知层而言,稳定可靠的多目标跟踪(Multi-object tracking, MOT)意义重大. 针对传统的目标关联和固定生存周期(Birth and death memory, BDM)管理的不足, 提出基于边界交并比(Border intersection over union, BIoU)度量的目标关联和自适应生存周期管理策略. BIoU 综合了欧氏距离和交并比(Intersection over union, IoU)的优点, 提高了目标关联的精度. 自适应生存周期管理将目标轨迹置信度与生存周期相联系, 显著减少了目标丢失和误检. 在KITTI 多目标跟踪数据集上的实验验证了该方法的有效性.关键词 无人驾驶, 激光雷达, 3D 目标检测, 3D 多目标跟踪引用格式 熊珍凯, 程晓强, 吴幼冬, 左志强, 刘家胜. 基于激光雷达的无人驾驶3D 多目标跟踪. 自动化学报, 2023, 49(10):2073−2083DOI 10.16383/j.aas.c210783LiDAR-based 3D Multi-object Tracking for Unmanned VehiclesXIONG Zhen-Kai 1, 2 CHENG Xiao-Qiang 3 WU You-Dong 1 ZUO Zhi-Qiang 3 LIU Jia-Sheng 1Abstract Unmanned vehicle is a three-dimensional motion in continuous time and space, and the object around the vehicle can not disappear or appear suddenly. Therefore, for the perception system, stable and robust multi-ob-ject tracking (MOT) is of great significance. Aiming at the shortcomings of object association and fixed birth and death memory (BDM) in the traditional one, the border intersection over union (BIoU) based object association and adaptive life cycle management strategy are put forward. The BIoU takes into account the advantages of both Euc-lidean distance and intersection over union (IoU) to improve the accuracy of object association. The adaptive life cycle management associates the object trajectory confidence with the life cycle, which significantly reduces object missing and false detection. The effectiveness of the proposed approach is verified through experiments on the KITTI multi-object tracking dataset.Key words Unmanned vehicles, LiDAR, 3D object detection, 3D multi-object trackingCitation Xiong Zhen-Kai, Cheng Xiao-Qiang, Wu You-Dong, Zuo Zhi-Qiang, Liu Jia-Sheng. LiDAR-based 3D multi-object tracking for unmanned vehicles. Acta Automatica Sinica , 2023, 49(10): 2073−2083多目标跟踪 (Multi-object tracking, MOT) 技术是自动驾驶感知系统的重要组成部分. 一方面,无人驾驶汽车的行驶过程是在时空下的连续运动,无人驾驶的规划与决策过程大多是基于连续时间序列完成的, 因此除了目标的位置信息以外, 目标的速度、角速度、加速度等时间关联特征也同样重要.另一方面, 由于目标检测本身依据单帧图像或点云数据完成[1], 缺乏目标在时空运动中的上下文信息,因此当光照变化、目标遮挡等情况发生时, 往往容易出现目标丢失, 这对于决策器和规划器的稳定运行会产生不利影响. 因此, 实现可靠的多目标跟踪意义重大. 多目标跟踪任务可以定义为当传感器获得一段时间内的目标数据序列后 (如一系列RGB 图像或3D 点云), 实现不同时刻数据帧下同一目标的正确匹配. 多目标跟踪问题需要解决以下问题:1) 对不同数据帧中的同一目标, 分配唯一的ID 标号,并维持该标号不变; 2) 对于新出现的目标, 分配新的ID 标号, 并进行持续跟踪; 3) 对已经从传感器数据中消失的目标, 应及时剔除, 避免不利影响.目前多目标跟踪的方法主要可以分为两类, 分别是端到端 (End to end) 方法和基于检测的跟踪收稿日期 2021-08-17 录用日期 2022-05-25Manuscript received August 17, 2021; accepted May 25, 2022国家自然科学基金(62036008, 62173243, 61933014), 中国船舶集团自立科技研发专项基金(202118J), 安徽理工大学高层次人才基金(2023yjrc55)资助Supported by National Natural Science Foundation of China (62036008, 62173243, 61933014), Science and Technology Re-search Project of China State Shipbuilding Corporation Limited (202118J), and Scientific Research Foundation for High-level Tal-ents of Anhui University of Science and Technology (2023yjrc55)本文责任编委 薛建儒Recommended by Associate Editor XUE Jian-Ru1. 中国船舶集团有限公司第七一三研究所 郑州 4500152. 安徽理工大学新能源与智能网联汽车学院 合肥 2311313. 天津大学电气自动化与信息工程学院 天津 3000721. The 713 Research Institute, China State Shipbuilding Cor-poration Limited, Zhengzhou 4500152. College of New Energy and Intelligent Connected Vehicle, Anhui University of Science and Technology, Hefei 2311313. School of Electrical and In-formation Engineering, Tianjin University, Tianjin 300072第 49 卷 第 10 期自 动 化 学 报Vol. 49, No. 102023 年 10 月ACTA AUTOMATICA SINICAOctober, 2023(Tracking by detection) 方法. 前者将目标检测与跟踪视为一个统一的过程, 输入单帧图像或点云数据, 直接输出带有唯一ID标号的目标检测框信息;后者则将检测与跟踪视为递进过程, 首先使用目标检测网络如Complex-YOLO[2], PointRCNN[3] 获得检测框位置, 然后再使用目标在多帧数据中的时空联系性进行关联, 获得跟踪结果. 代表方法包括SORT (Simple online and real time tracking)[4]、Deep-SORT (SORT with a deep association metric)[5]和AB3DMOT (A baseline for 3D multi-object tracking)[6]. 其中AB3DMOT将2D多目标跟踪问题扩展到3D多目标跟踪任务, 提出了一种简洁高效的实时多目标跟踪框架, 并在KITTI数据集上验证了出色效果, 实时性达到了200帧/s, 是3D多目标跟踪领域的经典之作.本文在分析AB3DMOT跟踪算法的基础上,针对原算法中的以下两点问题进行了研究: 1) 目标关联度计算在基于检测的跟踪方法中起到了突出作用, 原AB3DMOT算法使用传统的交并比 (Inter-section over union, IoU) 作为度量指标, 因此存在当两个检测框不相交时IoU = 0的问题[7−8], 造成匹配失败; 2) 目前的MOT算法中大多都会用到生存周期 (Birth and death memory, BDM) 策略, 用于降低漏检率、获得更好的跟踪效果, 但多采用固定生存周期, 对所有目标进行无差别处理, 并未考虑检测结果本身置信度对跟踪的影响. 针对上述问题,本文提出了一种基于边界交并比 (Border intersec-tion over union, BIoU) 度量的自适应多目标跟踪算法, 主要创新点包括:1) 提出了BIoU度量方法用于计算检测结果的关联性矩阵, 相比于单一使用欧氏距离或传统IoU 度量的方法, BIoU可以有效解决无交集和奇点问题, 获得更可靠的多目标跟踪结果;2) 提出了一种自适应的生存周期管理策略, 将检测结果本身的置信度与生存周期关联起来, 可以有效避免由于遮挡导致的跟踪失败和由于误检导致的错误跟踪的情况.基于KITTI多目标跟踪数据集[9]进行的实验表明, 本文提出的基于BIoU和自适应生存周期管理的多目标跟踪算法, 相比于原算法可以有效地提高跟踪的准确性和鲁棒性.1 研究现状1.1 2D/3D多目标跟踪任务多目标跟踪问题按照跟踪目标的状态种类可以分为2D多目标跟踪和3D多目标跟踪. 其中2D多目标跟踪主要用于图像领域的目标跟踪任务, 如安防监控、军事侦察、自然观测等领域[10]. DeepSORT[5]算法引入马氏距离度量和级联匹配用于提高跟踪精度. Leal-Taixé 等[11]介绍了一种两阶段深度学习跟踪算法: 使用局部时空编码聚合像素和光流信息,通过梯度增强分类器将图像上下文特征与CNN输出相结合. 孟琭等[12]详细说明了光流法、相关滤波法和深度学习方法在目标跟踪领域的应用效果. 与2D多目标跟踪相比, 基于点云数据的3D多目标跟踪具有较为准确的深度估计, 此类方法大多基于运动学模型. Azim等[13]利用卡尔曼滤波器对获得的相邻两帧激光点云基于八叉树的占据栅格地图分析其不一致信息, 从而检测动态物体; 再使用全局最近邻的方法进行数据关联; 最后基于卡尔曼滤波跟踪动态物体的中心点. Song等[14]采用一种多任务的稀疏学习算法来选取最佳的候补对象, 提高了复杂环境下的跟踪效果. 为了验证有效的深度估计对目标跟踪性能的影响, Sharma等[15]使用基于3D 点云校准的2D图像进行目标跟踪, 考虑了三维空间信息, 有效缓解了基于RGB图像中的深度估计不准确和遮挡问题, 实现了较好的跟踪效果. 2020年, Weng等[6]将2D跟踪算法SORT的思想迁移到3D点云中, 提出AB3DMOT算法, 无需GPU训练即可实现优秀的跟踪性能.1.2 关联度量目标匹配是多目标跟踪中的重要环节, 有效度量预测目标与检测目标之间的关联性, 是获得可靠匹配结果的关键. 常用的匹配方法包括基于外观显著性特征的匹配方法[16−17]和基于空间位置相关性的匹配方法[18−19]. 与2D图像相比, 3D点云数据更为稀疏, 外观特征不明显, 因此更常采用空间位置的相关性进行匹配. IoU和目标间距离是常用的两种度量方法. SORT[4]和AB3DMOT[6]算法中均使用预测框与检测框的IoU值作为关联度量, 再利用匈牙利算法进行匹配. 使用原始IoU进行关联度量存在两个问题: 1) 当预测框与检测框无交集时IoU = 0,此时无法获得有效的度量信息; 2) 多个预测框可能与检测框具有相同的IoU值, 如图1(a)中的情况.另一种方法是使用目标间距离作为度量指标, 如预测框与检测框中心点之间的欧氏距离[19]. 但使用距离度量同样存在不同的预测框与目标框的距离相同的情况. 如图1(b), 虽然蓝色和红色表示的两个预测框差异很大, 但它们与检测框中心的欧氏距离是相同的. 近年来, 使用深度网络来学习目标关联性2074自 动 化 学 报49 卷特征的方法也得到了诸多研究, 如Wu 等[18] 将Point-RCNN 检测器得到的特征也作为关联度量的要素加入度量过程, 从而获得更可靠的度量结果.1.3 生存周期管理在现有的多目标跟踪算法中, 会使用生存周期管理策略[5−6, 18]. 一方面, 当出现因为遮挡造成的目标丢失情况时, 生存周期管理策略可以保证在一段时间内仍然可以持续跟踪目标而不会立刻丢失; 另一方面, 当出现误检情况时, 由于生存周期管理策略要求目标连续检测多帧, 所以可以有效过滤掉单帧误检的目标. 目前通常使用的是固定周期的管理策略, 即对所有目标进行相同时长跟踪用于确定目标或删除目标. 而在实际应用中, 考虑到目标检测单元会输出检测框的置信度, 用于表征检测结果的可靠性, 因此, 可以根据置信度对不同目标进行自适应生存周期管理, 即: 对置信度较高的目标可以保持更长时间以解决遮挡造成的目标漏检; 对置信度较低的目标在发生误检后应尽快删除.2 基于BIoU 的3D 多目标跟踪2.1 问题描述z z 多目标跟踪的主要任务是在给定一个图像序列的前提下, 找到图像序列中待检测目标, 并将不同帧中检测到的目标进行关联, 得到目标的运动信息,给每一个运动目标一个固定准确的ID 标号. 对于3D 目标检测, 一方面其天然克服了基于RGB 图像中的2D 目标检测的遮挡与目标位置估计不准确的问题, 使得基于运动估计的在线跟踪算法易于应用;另一方面, 对于3D 目标检测的点云数据而言, 缺乏类似RGB 图像那样丰富的语义特征, 导致难以使用特征描述的方式进行跟踪. 因此, AB3DMOT [6]算法仅使用简单朴素的跟踪策略就实现了高效实时的目标跟踪效果. 但是, 该方法在匈牙利匹配环节中使用原始的3D IoU 作为成本度量, 而无人驾驶汽车的多目标跟踪本质仍然是一种近似的2D 平面运动, 其在 轴方向上变化较小, 导致目标检测在 轴方向上的估计将对跟踪性能产生较大影响, 同时由于IoU 度量的局限性, 本文提出BIoU 作为一种新的成本度量融入到匈牙利匹配之中. 目标的生存周期管理是目标跟踪的重要环节, 生存周期设置过短在目标检测不稳定时会造成较为频繁的ID 切换,生存周期过长容易增加错误跟踪和目标误检. 因此,通过对跟踪轨迹的置信度打分, 本文设计了自适应的生存周期管理机制, 动态地调整目标的生存周期减少了ID 切换和目标误检, 实现了较好的跟踪性能.如图2所示, 本文所提出的3D 多目标跟踪的整体流程可以分为以下几个部分:1) 使用3D 检测器获得目标检测框;2) 使用3D 卡尔曼滤波器获得上一帧的目标预测框;3) 基于BIoU 计算检测框与预测框的关联度,使用匈牙利匹配算法获得最优匹配结果;4) 使用3D 卡尔曼滤波对所有匹配目标进行状态更新;5) 对未匹配成功的目标进行生存周期管理;6) 输出具有唯一ID 标号的目标边框.2.2 卡尔曼滤波卡尔曼滤波[20]是目前状态估计应用最为广泛的估计优化算法, 它能够根据过去的信号信息, 利用统计计算的原理, 优化最小均方误差, 从而预测出未来的状态量. 卡尔曼滤波是对时间参数估计的yyx(a) 不同预测框和检测框具有相同 IoU(a) Different predicted boxes have same IoUs withthe detected box(b) 不同预测框和检测框具有相同欧氏距离(b) Different predicted boxes have same Euclideandistances with the detected boxxOO检测框检测框2预测框2预测框1预测框1预测框图 1 IoU 度量和欧氏距离度量失效情况Fig. 1 Invalid cases about IoU metrics andEuclidean distance metrics10 期熊珍凯等: 基于激光雷达的无人驾驶3D 多目标跟踪2075最小二乘逼近, 能够建立起状态变量随时间变化的方程, 从而估计出今后某个时刻的状态.卡尔曼滤波算法的核心包括如下几个方程:1) 描述预测过程中, 系统的状态向量预测方程A B U kk ˆXk k X k −1k −1W k −1k −1其中, 为状态转移矩阵, 为控制输入矩阵, 表示 时刻的控制输入向量, 表示 时刻状态的预测值, 表示 时刻的状态输出值, 为 时刻的状态转移过程中的随机干扰噪声, 表现为均值为零的高斯白噪声.2) 描述先验估计协方差矩阵的更新过程Q W k ˆPk k 其中, 为状态转移过程噪声 的协方差矩阵, 为时刻的先验估计协方差矩阵的预测值.3) 描述观测模型中由系统观测值得到系统观测向量的过程H Z k k V k 其中, 为状态观测矩阵, 为 时刻状态变量的观测值, 为状态观测过程中的随机干扰噪声向量, 表现为均值为零的高斯白噪声.4) 卡尔曼滤波增益方程 (权重)K k k R V k 其中, 表示 时刻的卡尔曼增益, 为观测噪声 的协方差矩阵.k 5) 卡尔曼滤波估计方程 ( 时刻的最优状态估计)X k k 其中, 表示 时刻状态向量经过卡尔曼滤波后的最优估计, 是系统的实际输出值, 表现为在预测值的基础上按照卡尔曼滤波增益叠加一个预测误差项.k 6) 卡尔曼滤波协方差估计方程( 时刻的最优协方差估计)P k k 其中, 为 时刻卡尔曼滤波的后验估计协方差矩阵的预测值. 该方程用来描述状态向量协方差矩阵的变化过程, 正是这种不断更新的机制才能保证卡尔曼滤波不断克服随机噪声的影响.卡尔曼滤波算法能够在不准确的测量数据基础上尽可能地消除噪声的影响, 对真实值做出预测. 目标跟踪算法把跟踪目标的属性作为状态变量, 利用卡尔曼滤波器对属性进行线性滤波, 得到更好的预测值.2.2.1 状态预测为了预测上一帧到当前帧的目标状态, 这里使用恒定速度模型估计对象间的帧间位移, 将目标状态表示成一个11维向量, 即x y z l wh θs v x v y v z x y z 其中, , 和 分别表示目标的中心点坐标, , 和 分别表示目标的3D 边框尺度, 为目标边框的航向角, 表示当前轨迹的置信度分数, , 和 分别为目标在三维空间中沿 , 和 轴方向上的运动速度.k −1第 帧数据中的所有目标状态构成的集合表示为ξik −1k−1i m k −1k −1k −1k 其中, 表示在 时刻的第 个目标状态, 表示在 时刻存在的目标数量. 通过 时刻的目标状态, 根据恒定速度模型可以估计出第 帧的目标状态. 目标的预测位置为k −1ξik −1k ξik 对于 时刻的每个目标状态 都可以给出 时刻的预测状态 .新出现的轨迹与目标丢失的轨迹完成匹配的目标预测目标基于 BIoU 度量的目标关联自适应生存周期管理具有唯一ID 的目标检测目标匹配失败的跟踪目标轨迹关联原始点云3D 目标检测3D 卡尔曼滤波T kT k − 1匹配失败的检测目标图 2 基于BIoU 和自适应生存周期的3D 多目标跟踪Fig. 2 3D multi-object tracking based on BIoU and adaptive birth and death memory2076自 动 化 学 报49 卷2.2.2 状态更新根据数据关联的结果, 可以将跟踪目标与检测目标分为4类: 跟踪匹配成功、检测匹配成功、跟踪匹配失败和检测匹配失败. 它们各自的具体形式为T match D match w k T unmatch D unmatch m k −1n k D match 其中, 和 表示匹配成功的跟踪目标与检测目标, 表示当前时刻匹配成功的数量,和 分别表示匹配失败的跟踪目标和检测目标, 表示上一时刻的所有跟踪目标数量, 表示当前时刻的检测目标数量. 完成匹配之后, 使用匹配成功的目标 根据贝叶斯规则更新对应的目标状态.2.3 基于BIoU 的匈牙利匹配算法为了解决传统IoU 度量或距离度量的失效问题, 本文设计了一种结合欧氏距离与IoU 的综合度量指标, 即BIoU 度量, 它由原始IoU 和边界距离惩罚项共同组成, 具体形式为IoU (B 1,B 2)R BIoU γp lt 1,p rb 1,p lt 2,p rb 2ρ(·)C max (B 1,B 2)IoU (B 1,B 2)ρ(p lt 1,p lt 2)ρ(p rb 1,p rb 2)C max (B 1,B 2)其中, 表示一般意义下的两个边界框的交并比, 为基于边界欧氏距离的惩罚项, 是惩罚项因子, 分别表示两个边界框最小外接框的左上顶点和右下顶点, 函数 为两个顶点间的欧氏距离, 表示两个边界框最小外接框的最大对角线距离, 用于对边界距离进行归一化处理. 需要说明的是, 采用最小外接框的方法可以弱化旋转对边界距离的影响, 便于计算边界距离.图3(a)展示了2D BIoU 的计算方法. 绿色和蓝色实线框代表两个不同的边界框, 虚线框为它们各自的最小外接框, 灰色区域表示 ,红色线段表示边界距离 和 ,黄色线段表示最大对角线距离 .对于3D 多目标跟踪, 本文将上述2D BIoU 的定义扩展到3D 坐标系下, 如图3(b)所示. 3D BIoU 的计算式为IoU 3D (V 1,V 2)V 1V 2R BIoU 3D p lft 1,p lft 2,p rrb 1,p rrb 2ρ(p lft 1,p lft 2)ρ(p rrb 1,p rrb 2)C max (V 1,V 2)BIoU thres BIoU 3D <BIoU thres 其中, 表示两个3D 边界框 和 的体积交并比 (图中的灰色区域), 惩罚项 与边界距离相关, 分别是两个3D 边界框最小外接框的左−前−上顶点和右−后−下顶点, 和 分别是对应边界距离 (图中的红色线段), 则表示两个最小外接框所有顶点间的最大对角线距离 (图中的黄色线段). 在给定阈值 的情况下, 当 时,则认为两个3D 边界框匹配失败, 即两个3D 边界框分别属于独立的两个不同目标.2.4 自适应生存周期管理策略F min F max 在多目标跟踪中, 现有目标会离开视野, 也可能有新目标进入视野, 因此需要一个模块来管理轨迹的产生和删除. 生存周期管理是常见的做法: 将所有未成功匹配的检测目标视为潜在的新轨迹, 为了避免跟踪误报, 只有在该目标连续检测到 帧后才认为是一个新的目标轨迹; 将所有未成功匹配的跟踪目标结果视为即将离开视野的轨迹, 为了避免误删轨迹, 只有该目标未成功匹配 帧后才视为目标丢失并将其删除. 理想情况下, 该策略可以保留因为单帧漏检未能成功匹配的目标轨迹, 并仅删除已经离开视野的目标轨迹. 但在实际中, 3D 目p lft 1p lt 1p lt 2p lft 2p rrb 1p rrb 2p rb 1p rb 2m a x (V 1, V 2)ma x(B1, B 2)IoU 3D (V 1, V 2 )IoU (B 1, B 2 )V 2B 2B 1V 1r (p rrb 1, p rrb 2)r (pr b1, pr b2)r (p l f t 1, p l f t 2)r (pl t 1, pl t 2)(a) 2D 边界交并比(a) 2D BIoU (b) 3D 边界交并比(b) 3D BIoU图 3 边界交并比示意图Fig. 3 Schematic diagram of BIoU10 期熊珍凯等: 基于激光雷达的无人驾驶3D 多目标跟踪2077标检测器的误检和漏检普遍存在, 采用固定的生存周期管理策略, 将出现错误的跟踪轨迹. 原因主要是固定的生存周期管理策略未有效利用检测目标的置信度信息, 而对所有目标均进行相同周期的检查操作, 从而导致检测置信度较低的目标 (往往为误检目标) 也需要跟踪多帧后才会被删除, 而检测置信度较高的目标一旦被多帧遮挡 (往往出现漏检)也可能被删除.因此, 本文提出一种自适应生存周期管理策略,根据目标检测结果的置信度, 动态调整最大生存周期, 具体为score αβσ(·)F max F Amax αβF max =3,α=0.5,β=−5其中, 为当前目标的检测置信度, 和 为尺度系数和偏移系数, 表示Sigmoid 非线性函数, 为最大生存周期, 为根据目标检测置信度计算后的生存周期. 通过选取合适的 和 , 实现更好的跟踪效果. 图4给出了当 时生存周期与检测置信度之间的关系. 利用Sig-moid 函数的S 型曲线特性, 检测目标的置信度越高, 该目标的生存周期将会越长, 从而实现生存周期动态调整.32F A m a x10010置信度−102030图 4 自适应生存周期Fig. 4 Adaptive birth and death memory3 实验结果与分析3.1 数据集与评价指标介绍本实验基于KITTI 数据集的多目标跟踪基准进行评估, 该基准由21个训练序列和29个测试序列组成. 对于每个序列都提供了LiDAR 点云、RGB 图像以及校准文件. 用于训练和测试的数据帧数分别为8 008和11 095. 对于测试集数据, KITTI 不向用户提供任何标签, 而是在服务器上保留标签以进行MOT 评估. 对于训练集数据, 含有30 601个目标和636条轨迹, 同样包括Car 、Pedestrian 和Cyclist 类别. 由于本文使用的目标跟踪系统是基于卡尔曼滤波算法的, 不需要进行深度学习训练, 因此将所有21个训练序列作为验证集进行验证. 实验对比了Car 、Pedestrian 和Cyclist 全部3个类别上的多目标跟踪效果.对于多目标跟踪方法, 理想的评价指标应当能够同时满足3个要求: 1) 所有出现的目标都能够及时被发现; 2) 找到的目标位置应当尽可能和真实的目标位置一致; 3) 应当保持目标跟踪的一致性, 避免目标标志的频繁切换. 根据上述要求, 传统的多目标跟踪将评价指标设置为以下内容: 多目标跟踪准确度 (Multi-object tracking accuracy, MOTA)用于确定目标的个数以及跟踪过程中的误差累计,多目标跟踪精度 (Multi-object tracking precision,MOTP) 用于衡量目标位置上的精确度, 主要跟踪轨迹命中率 (Mostly tracked, MT), 主要丢失轨迹丢失率 (Mostly lost, ML), 身份切换次数 (ID swit-ch, IDS), 跟踪打断次数 (Fragment, FRAG) 等.3.2 实验结果实验流程如图5所示, 其中3D 目标检测器使用与A B 3D M O T 算法相同的、已经训练好的PointRCNN 模型. 在目标匹配阶段, 使用本文提出的BIoU 计算预测框与目标框之间的关联度, 然后使用匈牙利匹配算法进行目标匹配. 成功匹配的目标送入卡尔曼滤波器进行状态更新, 未成功匹配的检测目标和预测目标均送入自适应周期管理模块进行判定. 自适应周期管理模块根据目标的置信度分数自适应调整目标的最大生存周期, 删除已达到最大生存周期而仍未匹配成功的目标, 最终得出具备唯一ID 标号的目标轨迹. BIoU 和自适应生存周期管理中涉及的参数通过整定得到, 最终模型使用的参数如表1所示.为了验证本文所提出的基于BIoU 度量和自适应生存周期管理多目标跟踪算法的性能, 本文与基准AB3DMOT 算法在KITTI 多目标跟踪数据集的3类目标上进行了对比; 同时在Car 类别上还与另外两种端到端的深度学习算法FANTrack [21] 和DiTNet [22] 进行了比较. 实验结果如表2所示.表2的结果表明, 本文提出的基于BIoU 度量和自适应生存周期管理策略的多目标跟踪算法相比于基准算法在3类目标上均获得了更高的MT 值,意味着本文算法在对目标的长时间跟踪性能上明显优于基准算法; 在Pedestrian 和Cyclist 两个类别上, 跟踪准确度MOTA 较基准算法有显著提升, 而在Car 类别上与基准算法基本一致. 最值得注意的是, 本文算法在命中率MT 和丢失率ML 这两项指标上均有显著提升, 说明了本文算法在长时间稳定2078自 动 化 学 报49 卷跟踪目标这个问题上具有明显优势. 另外, 在Ped-estrian和Cyclist两类目标的跟踪任务上获得更好的效果, 也说明了基于BIoU的目标跟踪可以有效提高对小目标的跟踪性能. 分析其原因, 可以发现小目标更易于出现检测框与预测框交集较少或无交集的情况, 这也正是BIoU相较于传统IoU最大的优点, 即解决IoU相等或IoU = 0时的关联度量问题.图6和图7分别展示在出现误检和漏检情况时, 本文所提出改进跟踪算法和基准算法的跟踪结果. 在图6的第2行中, 两类算法均出现了误检的情况 (用红色圆圈标记), 但相较于基准算法(图6(a)的第1行), 由于引入了自适应生存周期管理,因此在下一帧数据中, 改进跟踪算法及时将误检目标删除, 而基准跟踪算法仍会对误检目标进行持续跟踪, 直到生存周期结束. 上述结果表明基于本文改进的跟踪算法可以明显减小误检目标的生存周期, 降低误检次数.同样, 对于目标漏检的情况, 本文算法也能给出更好的结果. 图7 (a)的第3行中, 由于红色圆圈标记的目标被其他物体遮挡而导致漏检, 在下一帧中, 该目标再次被检测到时, 已被标记为新的目标(这一点从对比图7(a)的第2行和图7(a)的第4行中检测框颜色不一致可以看出). 而使用本文提出的改进算法, 即使在图7(b)的第3行中出现了遮挡,因为生存周期并未结束, 因此目标仍然在持续跟踪, 也未发生身份切换的问题. 这说明, 在由于目标遮挡等问题出现漏检时, 本文提出的改进跟踪算法可以有效克服漏检问题, 保持目标持续跟踪与ID 恒定.3.3 消融实验对比F max=5F maxF AmaxF Amax为了进一步说明BIoU度量和自适应生存周期管理策略的实际效果, 本文在KITTI验证集上进行了消融实验. 为了便于比较, 本文设置最大生存周期; 对于固定生存周期策略, 生存周期即为; 对于自适应生存周期策略, 采用式 (13) 描述的关系自适应计算生存周期. 消融实验的结果如表3所示, 其中不使用BIoU和的跟踪方法即为原始AB3DMOT算法.首先, 对BIoU进行性能分析. 在表3中, 每类目标的第2行数据与第1行相比, 区别在于使用BIoU表 1 模型参数Table 1 Model parameters参数值说明γ0.05BIoU惩罚因子α0.5生存周期尺度系数β4生存周期偏移系数F max3 (Car)5 (Others)最大生存周期对Car目标为3对其他类别目标为5F min3目标轨迹的最小跟踪周期该值与AB3DMOT相同BIoU thres−0.01BIoU阈值小于阈值认为匹配失败具有唯一 ID 标号的跟踪结果跟踪结果自适应生存周期管理基于 BIoU 的目标匹配卡尔曼滤波器匹配失败检测目标检测目标3D 目标检测网络匹配失败预测目标预测目标匹配目标上一时刻轨迹当前时刻轨迹轨迹关联新加入轨迹与需要丢弃轨迹32FAmax1010置信度−102030p ltp ltB21X^k = AX k − 1k −+ BU k + WP^k = AP k − 1A T + QZk= HX k+V kKk= P^k H T(HP^k H T + R)−1Xk= X^k + K k(Z k−HX^k)Pk= (I−K k H)P^k B1d1d2max(B1, B2)p rbp rb图 5 基于激光雷达的3D多目标跟踪整体流程Fig. 5 Overall pipeline for LiDAR-based 3D multi-object tracking10 期熊珍凯等: 基于激光雷达的无人驾驶3D多目标跟踪2079。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多目标跟踪雷达
GE GROUP system office room 【GEIHUA16H-GEIHUA GEIHUA8Q8-
多目标跟踪雷达
路口存在检测方案
采用多维式扫描雷达天线和先进DSP跟踪算法,对路口单方面向最少四车道、最多八车道的车辆进行精准的存在检测或感应检测,同时还能提供精准的单车及时测度、车辆位置信息以及停止线的车流量、平均速度和占有率等交通刘统计数据。
路段多功能检测,能对横向四车道八车道、纵向160米范围的大视域内车辆进行实时检测。
跟踪区域内所有车辆的行为轨迹、真实量化还原路况状态,提供精准的单车即时时速度、车辆位置、车型信息,同时提供精准的断面的车流量平均车速和占有率等交通流统计数据,以及对区域内多种异常事件及时报警,为交通诱导系统和交通事件检测系统提供数据支撑,
随着城市车辆快速增长,路口的管理压力越来越大,配套的信号控制系统、交通诱导、交通仿真系统等对数据的要求也越来越高。
而路口车辆存在信息是实现高效、稳定信号控制的基本要求,也是现阶段国内外主流交通信号控制系统应用最为成熟的数据模型之一。
因此,交叉路口的车辆存在信息就显的尤为重要。
城市路口车辆存在检测系统通过建立覆盖路口特定位置的采集点位,配备前端感知检测,实时吧存在信息传送之信号机控制及系统,对路口信号配时,优化提供支撑。
同时,公安交通管理部门可以根据车流量历史统计数据、分析路口车辆运行规律,针对性制定控制管理策略。
需求说明:
城市路口存在检测系统,主要完成路口停车线、或特定断面的车辆存在信息采集,可以及时掌握路口特定位置车流量状态,为信号机控制、交通诱导等系统提供数据支撑。
1、在城市重要路口设立和完善的存在检测点、检测各方的车流量信息。
2、建立城市的数据传输、应用接口模块。
实现无缝对接信号机控制系统。
3、用户可以通过实时数据库、以及客户端管理进行查看每个路口车辆存在信息、车流量、占有率等,可以连续24时实时检测。
4、具备数据存储功能。
可以作为路口管理的数据支撑。
系统说明:
路口但功能系列、城市交叉路口应用环境下、对交叉路口各个方向车辆存在信息进行采集,可以最大化利用现有杆件,
1、首创采用雷达方式的路口存在检测,突破以往传统检测方式,从而丰富了路口车辆检测方式,
2、检测精度高、停车线检测精度、尤其低速和禁止车辆存在检测精度高、是业界性能最优的存在检测系统设备,
3、系统成熟稳定,更支持无缝接入国内外主流信号控制系统。
运行稳定、使用寿命长达十年之最。
4、接口类型通用化、支持IO信号、数字信号输出、支持开关量、RS232、RS48
5、RjS45等硬件接口。
5、其安装施工方便、无需破坏路面和单独立杆、可以充分利用现有杆件进行施工安装布线方便、支持无线传输。
6、后期升级维护方便、路口更改以及道路改造、只需远程更新设置即可。
主要应用:
1、为信号控制系统提供前端存在检测
2、为交通诱导提供交通流量统计。
江苏志德华通信息技术有限公司
编辑者:大鹏
2017年9月5号。