“慧鱼模型”三自由度机械手
三自由度机械手臂实验报告书
苏州大学2013级机械电子专业《机电一体化》实验报告书学生姓名:学号:指导教师:机电工程学院2013.111 实验目的培养学生设计、修改方案并掌握利用模型进行检验方案是否正确。
2 实验原理在进行机构或产品的创新设计时,往往很难判断方案的可行性,如果把全部方案的实物都直接加工出来,不仅费时费力,并且很多情况下设计的方案还需模型来进行实践检验,所以不能直接加工生产出实物。
现代的机械设计很多情况下是机电系统的设计,设计系统不仅包含了机械结构,还有动力、传动和控制部分,每个工作部分的设计都会影响整个系统的正常工作。
全面考虑这些问题来为每个设计方案制作相应的模型,无疑成本是高昂的,甚至由于研究目的、经费或时间的因素而变为不可能。
慧鱼创意组合模型由各种可相互拼接的零件组成,由于模型充分考虑了各种结构、动力、控制的组成因素,并设计了相应的模块,因此可以拼装成各种各样的模型,可以用于检验学生的机械结构设计和机械创新设计。
3 实验设备和工具慧鱼创意组合模型、电源、计算机、控制软件等。
4 实验准备工作熟悉慧鱼创意组合模型的拼装,领取模型。
5 实验方法与步骤1)根据教师给出的创新设计题目或范围,经过小组讨论后,拟定初步设计方案。
2)将初步设计方案交给指导教师审核。
3)审核通过后,按比例缩小结构尺寸,使该设计方案可由慧鱼创意组合模型进行拼装。
4)选择相应的模型组合包。
5)根据设计方案进行结构拼装。
6)安装控制部分和驱动部分。
7)确认连接无误后,上电运行。
8)必要时连接电脑接口板,编制程序,调试程序。
步骤为:先断开接口板、电脑的电源,连接电脑及接口板,接口板通电,电脑通电运行。
根据运行结果修改程序,直至模型运行达到设计要求。
9)运行正常后,先关电脑,再关接口板电源。
然后拆除模型,将模型各部件放回原存放位置。
6慧鱼创意组合模型的说明1)构件的分类慧鱼创意组合模型的构件可分成机械构件、电器构件、气动构件等几大部分。
机械构件主要包括:齿轮、连杆、链条、齿轮(圆柱直齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮)、齿轮轴、齿条、蜗轮、蜗杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱、铰链等。
慧鱼实验报告---精品模板

慧鱼机器人模型组装综合实验施。
五、实验步骤(1)慧鱼模型名称及工作过程避障机器人(2)模型组件选择柱、块:固定支撑和机器人实体搭建;板:一侧具有平滑表面,通常用于制作平台或装饰;轮孔条:可用于轴、连杆等组件的支撑;连接件:在结构制作中起到衔接的作用。
连杆、链条、履带、齿轮、齿条、涡轮、蜗杆、凸轮、弹簧、曲轴、万向节等9V双向直流电机、按钮、灯、接线插头、光敏晶体管、电磁阀、接口板等储气罐、气缸、活塞、气弯头、电磁气阀、气管(3)模型组件组装【提示】:①各个组件之间是如何连接的;②组件连接中有哪些注意事项.可以附模型装配图。
构件连接方式:基本构件采用燕尾槽插接方式连接,可实现六面拼接,可多次拆装。
确保构件要到位,不滑动;注意电子元件正负极,接线稳定可靠不松动;整体美观,布线规范。
(4)接线电路连接:通信线路连接:①USB口连接方式:需要安装硬件驱动;②串口连接:硬件不支持热拔插,须关闭计算机后再进行硬件连接。
(5)端口设置及硬件调试路径一、菜单“选项”下的“设置接口"菜单;路径二、工具条上“检查接口和终端”按钮。
弹出端口设置对话框,在“端口"下拉列表中选择连接的接口,其他参数默认。
如果不知道端口号,可以在系统硬件信息中查看。
完成端口设置之后,可进行硬件的测试:路径一、菜单“选项”下的“检查接口”菜单;路径二、工具条上“检查接口和终端"按钮。
弹出“检查接口”对话框:M1~M4用鼠标点击,如果输出组件是电机,可以用左键和右键分别点击测试按钮,可以实现电机的不同转动方向;E1~E8连接按钮,E1~E8连接光敏晶体管(分别演示)。
在后面的编程中,需要使用数字量输入/输出接口号,因此硬件测试不仅仅是为了测试电路、通信线路连接是否正常,同时也是记录数字量输入/输出接口号与机器人关节控制之间的关系。
(6)程序设计打开LLWin软件,点击新建按钮,进入程序编辑界面。
右侧有一个浮动的窗体,窗体名为工具箱。
基于ROBO PRO软件的三自由度机械手圆弧轨迹的研究
2 三 自 由 度 机 械 手 的 组 成 及 工 作 原 理
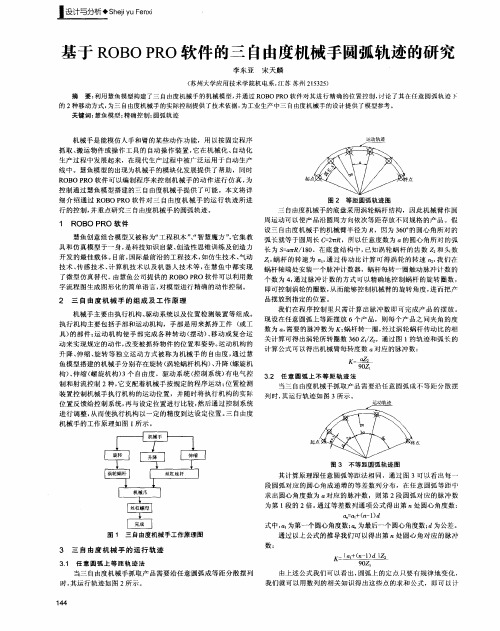
机械 手 主要 由执 行机 构 、 驱动 系 统 以及位 置检 测 装 置等 组 成 。 执行 机 构主 要 包括 手部 和运 动机 构 ,手 部是 用 来抓 持工 件 ( 工 或 具) 部件 ; 动 机 构使 手 部 完成 各 种 转 动 ( 动) 移 动 或 复合 运 的 运 摆 、 动来 实现 规 定 的动 作 , 改变被 抓 持物 件 的位 置和 姿势 。 动 机构 的 运 升 降 、 缩 、 转 等 独立 运 动 方 式被 称 为机 械 手 的 自由度 , 过 慧 伸 旋 通 鱼 模 型搭 建 的机 械 手分 别存 在 旋转 ( 轮蜗 杆机 构) 升 降 ( 涡 、 螺旋 机
量 sjue 坌 hi n e Fx y
基于 R B R O OP O软 件 的三 自由度机械 手圆弧轨迹 的研 究
李东亚 宋 天 麟
( 苏卅f 大学应用 技术学院机电系 , 苏 苏州 2 5 2 ) 江 13 5 摘 要: 利用慧鱼模型构建 了三 自由度 机械手 的机 械模型 , 并通 过 RO BOP O软件对其进 行精确 的位 置控制 , 论了其在任意 圆弧轨迹 R 讨
的 2种移 动方式, 为三 自由度机械手 的实际控 制提供 了技术依据 , 为工业生产中三 自由度机械手 的设计提 供了模型参考。
关键词 : 慧鱼模型; 精确控制; 圆弧轨迹
机 械 手是 能模 仿人 手 和臂 的某 些动 作 功 能 ,用 以按 固定 程 序 抓 取 、 运物 件 或 操作 工 具 的 自动 操 作装 置 , 搬 它在 机 械 化 、 自动化 生产 过程 中 发展起 来 ,在 现代 生产 过程 中被广 泛运 用 于 自动 生产
慧鱼实验_精品文档

慧鱼实验21世纪将是个全面创新的时代,如何培养、提升现代学生的创造力、想象力与科学技能,来迎接这个竞争的时代微型组合机器人能实现多种控制方式及多种模型设计,适合于机电一体化、工业自动控制、机械创新等课程,推荐采用PLC控制技术。
微型组合机器人配有教材,图文并茂、浅显易懂,对每一个模型都作深入浅出的原理说明、功能解释,鼓励学生举一反三、活学活用,让他们不断发展创新。
微型组合机器人是通过各种各样的构件(功能模块)组合拼装而成,因此,“构件”是模型的最小组成部分。
实验一计算机组合包创意实验设计一实验目的:1、熟悉慧鱼模型的各个模块。
2、了解三自由度机器人的基本结构。
3、能够运用计算机编程,合理控制机器人的运动。
4、能进行简单创意实验设计。
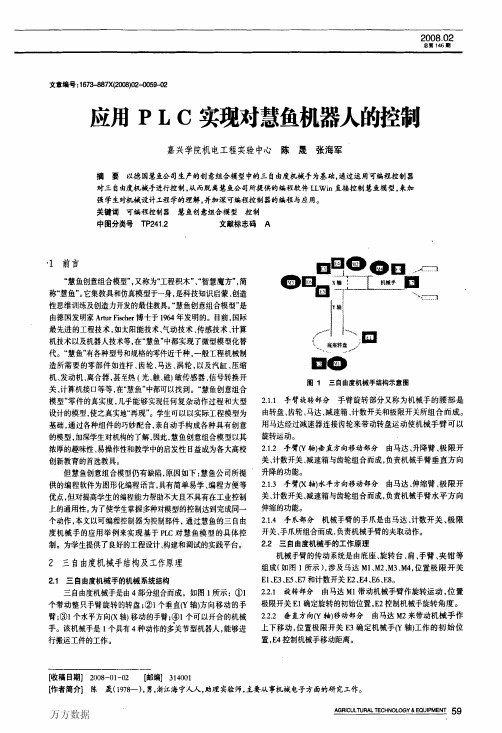
二实验器材:慧鱼计算机组合包一套慧鱼专用电源一套PC机一台LLWIN软件一套接口电路板一块三实验原理:如图所示(见附图):为一三自由度机器人,能够实现搬运工件的作用,三自由度机器人包括腰部、大臂以及夹钳。
腰部能够实现左右旋转运动,大臂能够实现上下的俯仰运动,夹钳则能够实现夹取物体。
该三自由度机械人总共涉及到6个行程开关以及3个电动机,其中M1驱动腰部旋转,M2驱动大臂俯仰,M3驱动夹钳的关闭。
E1用于限定夹钳的开闭位置,E2用于腰部旋转进行计数,E3限定了大仰起后的极限位置,E4用于夹钳的驱动轴旋转次数进行计数,E5对大臂处的蜗杆旋转次数进行统计,E6限制腰部旋转的极限一些置。
四实验内容1、按照装置图组装出机器人。
2、按照连线图将机器人各部与计算机数据线连好。
3、用计算机中的软件(LLWIN)对机器人进行控制操作。
(1)对各个部分进行检测:M1M2M3E1E2E3E4E5E6全部测试通过后再进行以下实验内容。
(2)调试出控制程度,进行连续操作。
4、对软件进行改编,使机器人实现更多的功能。
(1)实现夹取与放置的换位。
(2)改变大臂运动轨迹。
五实验思考题1、单个测试腰部可旋转,但整体测试时腰部却不按程序规定的运行,可能是什么原因2、大臂可以俯仰,但程序并不向下运行,会是什么原因3、夹钳不能开闭,会是什么原因4、如何实现运动轨迹投射到平面后为非矩形实验二移动机器人创意实验设计一实验目的:1、了解移动机器人的基本结构2、能够运用计算机编程,控制移动机器人的运动3、进行创意实验设计二实验器材:慧鱼移动机器人组合包一套慧鱼专用电池盒一个或专用电源一套PC机一台(要求:486、66以上,8M以上内存,空闲的LPT2口)LLWIN专用软件一套,(WINDOS3、1以上或WINDOWS95)接口电路板一块电缆若干三实验原理如图所地:为一跟踪光源移动机器人,能够跟踪光源而运动。
慧鱼模型工业机械手设计

摘要慧鱼创意组合模型主要有组合包、培训模型、工业模型三大系列,涵盖了机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域和高新学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟,从而为实验教学、科研创新和生产流水线可行性论证提供了可能,世界知名的德国西门子、德国宝马、美国IBM等一大批著名公司都采用慧鱼模型来论证生产流水线。
AbstractFischer creative combination model mainly include the combination packages, training mode , industrial model three series, covers the mechanical, pneumatic, automotive, electronics, control technology, energy technology and robot technology, and high and new disciplines, using industrial standard of the basic building blocks (mechanical components/electrical components, pneumatic components), supplemented by sensor, controller, actuator and software, using design and experimental analysis, can implement any reduction of technology process, more can realize industrial production and the simulation of large mechanical equipment operation for feasibility experiment teaching, scientific research and innovation and production lines provides a possible, world famous Germany Siemens, Germany's BMW, the United States a large number of famous companies such as IBM model is used to demonstrate the production assembly line.目录摘要 (I)1 绪论 (1)1.1慧鱼创意模型实验介绍 (1)1.2机械手的组成和分类 (4)1.2.1 机械手的组成 (4)1.2.2 机械手的分类 (7)1.3机器人领域的未来发展趋势 (8)1.4课题的提出及主要任务 (9)1.4.1 课题的提出 (9)1.4.2 课题的主要任务 (10)2 机械手的设计方案 (11)2.1工作原理 (11)2.1主要机构构件的介绍 (12)2.2.ROBOP RO的介绍 (14)2.3如何编程 (15)3组装过程 (23)6 结论 (26)致谢 (28)1 绪论1.1 慧鱼创意模型实验介绍1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
基于PLC的3自由度机械手的控制系统

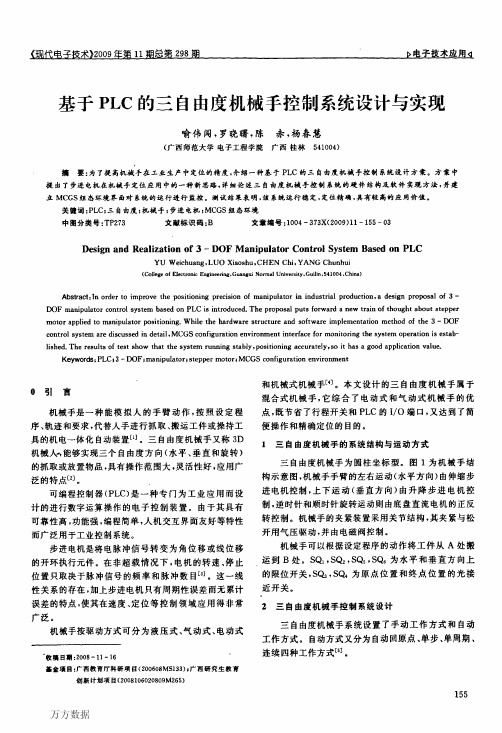
第29卷第3期2008年6月华 北 水 利 水 电 学 院 学 报Journa l of Nort h China Institut e of W ate r Conservancy and Hydroe l ec tric Powe rVol 129No .3 Jun .2008收稿日期作者简介刘晓燕(—),女,河南许昌人,在读硕士研究生,主要从事机电控制及自动化方面的研究文章编号:1002-5634(2008)03-0048-02基于PL C 的3自由度机械手的控制系统刘晓燕1,乔文生2,陈俭培1,王丽君1(1.华北水利水电学院,河南郑州450011;2.北京京航公司,北京100076)摘 要:利用“慧鱼”组合模型构建了3自由度机械手的机械模型,并对其运动原理和各模块间的相互作用进行了分析与研究,在此基础上利用PLC 实现了机械手的控制过程,对设计中出现的电源不匹配问题,通过使用中间继电器和稳压直流电源对其进行控制.实践表明,整个控制系统运行可靠,为实际3自由度机械手的控制提供了技术参考.关键词:3自由度机械手;PLC;行程开关;中间继电器中图分类号:TP241.2 文献标识码:A 3自由度机械手又称3D 机械人,能够实现3个自由度方向(水平、垂直和旋转)的抓取或放置物品,具有操作范围大、灵活性好、应用广泛的特点[1].1 3自由度机械手的工作原理1.1 结构简介采用慧鱼组合模型对3自由度机械手进行了构建,模型结构如图1所示[2].1—底座;2—旋转台;3—小圆柱;4—抓手行程开关;5—抓手电机;6—手臂;7—垂直行程开关;8—垂直螺杆9—螺杆轴齿轮;10—惰轮;11—垂直电机齿轮;12—垂直电机;13—水平电机;14—水平行程开关;15—水平螺杆;16—水平螺母;17—垂直螺母;18—旋转行程开关图1 3自由度机械手组合模型1.2 工作原理3自由度机械手能够实现在不同的方向上抓取物体,其运动系统主要由4部分组成:水平、垂直、旋转和手爪运动系统.每一个运动系统的控制部分都是由1个直流电机、2个行程开关组成.以垂直运动系统为例介绍3自由度机械手的工作原理.垂直运动系统主要由3个主要部件组成:电机、限位行程开关和计数行程开关.电机为垂直运动提供动力:这里所选用的电机为直流电机,通9V 电压,正向旋转;通以-9V 电压,反向旋转.限位行程开关限制垂直运动的极限位置,也是垂直运动的起始位置:当机械手臂向上运动碰到上面的限位行程开关后,机械手臂停止运动.计数行程开关是用来计量电机的旋转圈数的,从而可以精确计算垂直运动的距离,起到定位的作用.垂直运动具体的运动过程可分为定位阶段和复位阶段.定位阶段:驱动电机使手臂从初始位置开始下降,通过定位行程开关计数使手臂到达指定位置停止.复位阶段:驱动电机反转使手臂上升,直到碰到限位行程开关结束.整个垂直运动以PLC 为核心,通过外接电路(一方面行程开关的信号经由外接电路输入到P LC 中,另一方面P LC 发送指令给电机,使电机产生相应的运动)进一步驱动执行机构动作.控制系统的结构如图2所示.:2008-01-20:1984.图2 控制系统的结构框图2 控制系统设计受实验室条件限制,采用了AFP12217-F 型[3]可编程控制器来实现3自由度机械手运动的控制过程.整个控制系统以可编程控制器为中心,通过继电器与稳压电源组成的外接电路与输入输出装置相连.主要的输入量为运动过程中的限位行程开关和计数行程开关,输出量为控制运动机构动作的电机.具体的控制过程如下:1.机械手开夹(抓手计数开关计数)ϖ旋转台正转到位置1ϖ垂直电机下降ϖ水平电机伸长(水平计数开关计数)到位置2ϖ闭夹夹取工件;2.垂直电机动作(上升)ϖ旋转台正转ϖ水平电机做收缩动作(水平计数开关计数)到位置3→垂直电机动作(下降)ϖ开夹(抓手计数开关计数)ϖ放工件;3.垂直电机动作(上升到顶部)ϖ旋转台反转到位置4ϖ水平电机做伸长动作(水平计数开关计数)→垂直电机动作(下降到底部)ϖ闭夹夹取工件; 4.垂直电机动作(上升顶部)ϖ旋转台反转ϖ水平电机做收缩动作(水平计数开关计数)ϖ垂直电机动作(下降)ϖ开夹放物件(抓手计数开关计数). 图3为实现整个控制作用的部分P LC 梯形图.3 设计中产生的问题及解决措施控制电机是9V 驱动,而P LC 输出电压是24V ,这样就出现了电源不匹配的问题,使用中间继电器和稳压直流电源即可解决.具体做法是:将2个中间继电器的接地端和9V 端联在一起,这样2个继电器原本的4个端子被化解为2个,然后将电机的2个输入端分别接在2个中间继电器上,再将2个中间继电器的输入端(24V 电源和接地端)分别接在P LC 控制面板上,这样就可以实现P LC 程序控制电机的正、反转.图3 PLC 梯形图参 考 文 献[1]柳洪义,宋伟刚.机器人技术基础[M ].北京:冶金工业出版社,1999:1-20.[2]德国慧鱼公司.操作手册L LW i n 3.0[Z].2004.[3]吴键强,姜三勇.可编程控制器应用技术[M ].哈尔滨:哈尔滨工业大学出版社,2000:23-46.3-DO F M a n ipu l a tor C on tr ol Syste m Ba sed on PLCL IU Xiao 2yan 1,Q IAO W en 2sheng 2,CHEN Jian 2pei 1,WANG L i 2jun 1(1.North China Institute of Wa ter Conservancy and Hydroelectri c Po wer,Zheng zhou 450011,Chi na;2.Be iji ng J inghang Co r porati on,B eijing 100076,Ch i na )Ab stra ct:F ische rt echnik ha s been adop t ed to e stablis h t he 3-DOF mani pula t or m echani ca l struc t ure,and the princ i p l e s of the move 2ment and t heir int e rac ti ons be t w een t he module s are analyzed and researched .On this basis,the PLC is used t o i m p le m ent t he control proce ss of the m ani pulat or .For the problem tha t po we r doe s n o tm atch wit h the equi pment t hat happens during t he design,by using the y D y,T ,y 2,f f 3DOF K y 3DOF ;L ;;y94第29卷第3期刘晓燕等: 基于PLC 的3自由度机械手的控制系统 in t e r med ia t e re la s an d regu l a t o r C po w er supp l it is co n tro ll ed .he p ractice sh ow s tha t t h e w ho l e co n tro l s stem op erati o n is re lia b le an d it p rov id s th e techn ical su p po rt o r the con tr o l o t h e actua l -man i p u la t o r .e w or d s:-man i p u la t o r P C trip s w itch in ter m ed i a te rela。
慧鱼实验

21世纪将是个全面创新的时代,如何培养、提升现代学生的创造力、想象力与科学技能,来迎接这个竞争的时代?微型组合机器人能实现多种控制方式及多种模型设计,适合于机电一体化、工业自动控制、机械创新等课程,推荐采用PLC控制技术。
微型组合机器人配有教材,图文并茂、浅显易懂,对每一个模型都作深入浅出的原理说明、功能解释,鼓励学生举一反三、活学活用,让他们不断发展创新。
微型组合机器人是通过各种各样的构件(功能模块)组合拼装而成,因此,“构件”是模型的最小组成部分。
实验一计算机组合包创意实验设计一实验目的:1、熟悉慧鱼模型的各个模块。
2、了解三自由度机器人的基本结构。
3、能够运用计算机编程,合理控制机器人的运动。
4、能进行简单创意实验设计。
二实验器材:慧鱼计算机组合包一套慧鱼专用电源一套PC机一台LLWIN 软件一套接口电路板一块三实验原理:如图所示(见附图): 为一三自由度机器人,能够实现搬运工件的作用,三自* 由度机器人包括腰部、大臂以及夹钳。
腰部能够实现左右旋转运动,大臂能够实* 现上下的俯仰运动,夹钳则能够实现夹取物体。
该三自由度机械人总共涉及到6个行程开关以及3个电动机,其中M1驱动腰部* 旋转,M2驱动大臂俯仰,M3驱动夹钳的关闭。
E1用于限定夹钳的开闭位置,E2用* 于腰部旋转进行计数,E3限定了大仰起后的极限位置,E4用于夹钳的驱动轴旋转* 的次数进行计数,E5对大臂处的蜗杆旋转次数进行统计,E6限制腰部旋转的极限* 位置。
四实验内容1、按照装置图组装出机器人。
2、按照连线图将机器人各部与计算机数据线连好。
3、用计算机中的软件(LLWIN)对机器人进行控制操作。
(1) 对各个部分进行检测:M1M2M3E1E2E3E4E5E6全部测试通过后再进行以下实验内容。
(2) 调试出控制程度,进行连续操作。
4、对软件进行改编,使机器人实现更多的功能。
(1) 实现夹取与放置的换位。
(2) 改变大臂运动轨迹。
基于PLC的三自由度机械手控制系统设计与实现
的抓取或放置物品,具有操作范围大,灵活性好,应用广 泛的特点Cz]。
可编程控制器(PLC)是一种专门为工业应用而设 计的进行数字运算操作的电子控制装置。由于其具有 可靠性高,功能强,编程简单,人机交互界面友好等特性 而广泛用于工业控制系统。
步进电机是将电脉冲信号转变为角位移或线位移 的开环执行元件。在非超载情况下,电机的转速、停止 位置只取决于脉冲信号的频率和脉冲数目[3]。这一线 性关系的存在,加上步进电机只有周期性误差而无累计 误差的特点,使其在速度、定位等控制领域应用得非常 广泛。
大学,2006. [9]孙岩洲,邱毓昌,丁卫东.电源频率对介质阻挡放电的影响
口].高电压技术,2002,28(11):43—53. [10]王振绪.提高大型高频臭氧发生器电能利用率的研究[D1
南京:河海大学,2006.
作者简介陈 飞 男.1983年出生,福建福州人,在读硕士。主要从事臭氧发生管的研究。 朱天字 男,1961年出生,江苏靖江人。硕士,教授。主要从事大型高频臭氧发生嚣的研究。 157
垒皇至蕉苤瘗昱g
参考文献
(I)主界面
9’手动上作方式界面
(c)自动工作方式界面
1-13王小玲.工业机械手的PLC控制[J].机电工程机术,2004,
33(9):32—36.
[2]李勇成.基于PLC的步进电机控制在工业机械手中的应用 [J].科技信息,2008(18):30—31.
[3]韩志强,刘晓婷.步进电机PLC控制的研究设计[J].轻工机 械,2006,24(4):114—115.
萎 X4 x5
X6
Y2
几
U
上^F
4.. Y3
几
基于“慧鱼”模型的工业机械手设计

②手腕
起 到连接 手部 和手臂 的作 用 ,主要起 支撑作 用 ,机器 程序 运动 ,并 同时机械 手接受 的指令 信息 被存储 起来 ,同 人 一般要有 6 个 自由度才 能使末端操作 器到达 目 标位 置和处 时按 其控 制系统 的按 照接收 的信息对 各末 端操作 器发 出指
于 期 望 的状 态 。
成。
分 ,手臂 的回转运 动和升 降 ( 或俯 仰 )运动均 与立柱 有密
切的联系。
⑤机座
①夹持部分 这是 机械 手 的独 立 的执行部 件 ,夹持部 分采 用蜗轮 蜗
杆 机构控制手抓的加紧 、释放 。
机 械 手 的各 执 行 机 构 部 件 和驱 动 系统 都 安 装 在 机 座
中发生相对运动。
经过 历 史 的 考 验 ,机 器 人 对 我们 的生 产 和 生 活越 来 越重 要 。单 位 时间 内的次 品率也越 来越低 ,同时我们 工作 更加 轻松 ,只需 控制好 操作 面板 ,也就 是机器 人 的控 制 系 统 。与此 同时 ,生产 出来 的产 品品质更 加完 美 ,这 样可 以
关键 词 :工 业 机 械 手 ; 慧鱼 模 型 ;ROB O P r o
中 图分类 号 :T P 2 4 2 文 献标 识码 :A
1 . 设 计 题 目的 提 出及 主 要 任 务
荷 大小都 发生 变化 ,运 动速 度和定 位精度也 不行 ;运动 平 稳 性要好 ,精度 要高 ,它是 机械手 的重要 指标 ;重量 和转 动 惯量要 小 ,为了提 高运动 运动速 度 ,尽量 减小 臂部 的重 量 ,同时还要 注意偏 重力矩 ,也就 是让臂 部 的重 心与立 柱 的重 心尽量靠 近 ;导向性要 好 ,一面手 臂在直 线运动 过程
三自由度机械手毕业设计

图2.3.1机械手基座的旋转运动
电机输出动能,经减速箱调节速度并传递到蜗杆,蜗杆与齿轮啮合传动,齿轮转动带动整个底座进行旋转运动。
2、自由度二:机械手的水平运动,如图2.3所示
图2.3.1机械手的前后运动
电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为工作台的前后运动。
3、自由度三:机械手的垂直运动
图2.3.2机械手的上下运动
电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为水平前后运动,最后经连杆机构转化为机械手的上下运动
4、机械手爪的夹紧与放松运动
图2.3.3通过上面的电机控制开夹
图2.3.4机械手夹紧与放松运动
电机输出动能,经减速箱调节速度并传递到传动轴,不同轴线的各传动杆通过万向铰链进行连接并传递动力,最近将杆件的旋转运动通过螺旋机构转化为手爪的夹紧或松开运动。
三自由度机械手
一、概述
1.1机电一体化技术
1.1.1机电一体化技术的定义和内容
机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。它由各种型号和规格的零件构成,类似于积木。零件的种类很多,几乎包括了机械课程和日常生活中的所有零件,如机械零件: 连杆、凸轮、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮等)、蜗轮、蜗 杆、螺杆、铰链、带、链条、轴(直轴和曲轴)、联轴器、弹簧、减速器、齿轮箱、车轮等;电气零件:直流电机、灯泡、电磁气阀、行程开关、传感器(光敏、热敏、磁敏、触敏)、可调直流变压器、电脑接口板、PLC 接口板、红外线发射接收装置等;气动零件:储气罐、汽缸、活塞、气弯头、手动气阀、电磁气阀、气管等。由这些零件的不同组合便可构造出各式各样的模型,这些模型主要可分为两大类:技术组和机器人组。技术组又包括传感器技术组、气动技术组、汽车技术组、太阳能技术组、万能组合包。机器人组又包括3D 机器人、计算机器人、实验机器人、工业机器人、移动机器 人和气动机器人。
2010慧鱼培训模型及工业模型介绍

2010 慧鱼培训模型和工业模型目录2006慧鱼创意组合模型培训模型介绍 (3)三自由度机械手3-D-Robot (505005) (4)带传送带的冲床Punching Machine with Conveyor Belt (505006) (5)双工作台操作流水线Indexed line with 2 Machining Stations (505007) (6)气动加工中心Pneumatic Processing Center (505008) (7)2006 德国慧鱼创意组合模型工业模型介绍 (8)包裹翻转模型Parcel turnover model (502030) (8)升降台Lifting table (502029) (10)带三轴门架的传送与分类流水线Transport and sorting line with 3-axis-portal(502027) (11)柔性加工流水线Flexible process line (502025) (12)带三轴门架的柔性加工流水线Flexible process line with 3-axis-portal (502024) (13)三轴门架3-axis-portal (502023) (14)加工中心Production unit with shuttle (502021) (15)加工单元SIDAC配套Processing units SIDAC matching (502018) (16)冲压机西门子兼容Ram machines SIEMENS compatible (502017) (17)装配流水线西门子兼容Assembly line SIEMENS compatible (502016) (18)立体仓库Midule high level storage warehouse (502015) (19)洗车线Car wash line (502014) (20)传送与分类流水线Transport and sorting line (502013) (22)五自由度机械手5-D-robot (502012) (23)可翻转传输带,旋转台和滑台Conveyor Belts, Turntable and Roll Line (502009) (24)气动分选机Pneumatic Picking (502007) (25)吸盘搬运机Converter Suck Gripper (502006) (26)小型立体仓库Compact -High-Level-Storage-Warehouse (502005) (27)小型洗车线Compact -Car Wash Line (502004) (28)小型柔性加工线Compact -Flexible Process Line with 2 Machine Tools (502003) (29)小型传送分类流水线Compact -Transport and Sorting Line (502002) (30)小型传输带Compact -Conveyor Belt (502001) (31)综合仓储加工系统Integrated Storage Processing System (502037) (32)三自由度机械手3-D-Robot (502036) (33)双工作台操作流水线Indexed line with 2 Machining Stations (502034) (34)焊接加工流水线Welding Processing Line (502032) (35)堆垛流水线Stow Processing Line (502031) (36)2010 慧鱼创意组合模型培训模型介绍----慧鱼创意组合模型创新教育的理想学具1964年,慧鱼创意组合模型(fischertechnik)诞生于德国,是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为职业院校创新教育和创新实验提供了最佳的载体。
应用PLC实现对慧鱼机器人的控制
万方数据2.2.3水平方向(x轴)移动部分由马达M3来带动机械手作前后移动,位置极限开关E5确定机械手()【轴)工作的初始位置,E6控制机械手移动距离。
2.2.4手爪部分由马达M4来带动机械手手爪作开合动作,位置极限开关E7确定机械手张开的最大位置,E8控制机械手闭合大小。
2.3三自由度机械手动作流程本文所设计的三自由度机械手将完成以下任务:①机械手张开到最大位置,旋转台、垂直方向、水平方向回到初始位置;②移动到位置2处抓取物体l,然后移动到位置3处,放下物体;③移动到位置l处抓取物体2,然后移动到位置4处,机械手不松开;④等待一段时间以便让其他机械手完成对这2个物体的加工,例如焊接;⑤将加工完成后的2个物体放置到位置5处,然后回到步骤①,进行下一个工作循环的抓取。
3可编程控制器的应用可编程控制器,由于它具有程序设计简单,组合灵活,特别是由于他的高可靠性和适应工业恶劣环境的能力,而在工业控制中得到了广泛的应用。
本例采用了目前应用较多的三菱FXlN系列PLC来控制。
FXlN系列PLC是由日本三菱公司生产的一种超小型PLC,主要用于较简单的开关量控制,配以模拟单元也可进行模拟量控制。
根据三自由度机械手的结构及工作原理,选用FXlN一40MR型的PLC。
它的性能指标为:24点输入16点输出;有24点定时范围为0.1~999s的定时器和8点定时范围为0.0l一99.9s的定时器;有32个均有掉电保护功能的计数器。
该型号PLC功能较强,平均每步执行速度约为1斗s,其输人输出相应时间不超过10ms。
3.1PLC输入接口电路与位置检测位置反馈信号是通过计数开关而得到,每个直流电机输出轴上都装有计数开关。
通过它实现对直流电机的转角进行检测。
计数开关主要是由计数齿轮、开关组成,计数齿轮是齿数为4的齿轮,安装在减速器上,这样各传动主轴每转一圈计数齿轮计数4次,可以有效的控制电机转动时间,达到准确定位的作用。
计数齿轮输出的脉冲信号为开关信号,不需要经过转换电路将信号转换成开关信号在接到PLC的输人端,可以直接连接到PLC的输入端。
“慧鱼模型”三自由度机械手
湖北理工学院毕业设计(论文)“慧鱼模型”三自由度机械手设计小册学院:机电工程学院班级:机械设计与制造指导老师:姓名:学号:201030120130湖北理工学院毕业设计(论文)一、概述 ............................................................11.1机电一体化技术 ...................................................11.1.1机电一体化技术的定义和内容 (1)1.1.2机电一体化系统组成 (1)1.2. 慧鱼机器人 .....................................................21.2.1慧鱼创意教学组合模型简介 (2)二、机器人的组成 .....................................................2.1组成构件 .........................................................32.2慧鱼机器人分析 ...................................................62.2.1机器人机构组成 (6)2.2.2主要成分构成及功能 (7)2.3. 机器人的工作空间形式 ............................................92.4机器人的机械运动形态和变换控制 ..................................112.5机器人的位移、速度、方向的控制方法 (13)湖北理工学院毕业设计(论文)一、概述1.1机电一体化技术1.1.1机电一体化技术的定义和内容机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
“慧鱼”工业机器人的三维实体建模及仿真
兰州交通大学毕业设计(论文)“慧鱼”工业机器人的三维实体建模及仿真摘要工业机器人作为现代制造技术发展的重要标志之一和新兴技术产业,已为世人所认同,并正对现代高技术产业各领域以至人们的生活产生了重要影响。
本设计从工业机器人的发展为引线,阐述了工业机器人以及焊接机器人的发展和应用现状,分析介绍了焊接机器人系统的组成、特点和发展趋势。
然后以德国“慧鱼”焊接工业机器人模型为基础,并对其所有模型零件进行了系统的测绘和记录,并运用美国参数技术公司开发的以参数化设计著称的产品设计软件Pro/E对“慧鱼”焊接工业机器人模型的零件逐一地进行了三维建模,再运用Pro/E装配对零件进行了装配并对工业焊接机器人模型的三维实体模型进行了仿真和部分的应力结构分析。
关键字:慧鱼创意组合;工业机器人;焊接机器人;Pro/E;三维仿真。
“fisher” industry robot'sthree dimensional entity modelling and simulationabstractThe industrial robot takes one of important symbols in modern technique of manufacture development and the emerging technological industry, has been widely recognized by the whole world, and is in all areas of modern high-tech industries as well as the lives of the people had a major impact. The design of the development of industrial robots from the lead, industrial robots, and described the development and application of welding robots, analyzed describes the composition of the welding robot system, characteristics and trends . Then the German industrial robots welding Fischertechnik model, and its parts all models of the system mapping and records, and using technology developed by the U.S. argument for parametric design software, product design, known for Pro / E on Fischer model of industrial robots welding the parts one by one carried out three-dimensional modeling, and then use Pro / E assembly of parts and assembly of industrial welding robot model three-dimensional solid model simulation and structural analysis of some of the stress.Key words:fischertechnik creative combined ;Industry robot; The welds robot; Pro/E;Three dimensional simulation目录1绪论 (1)1.1工业机器人的发展与应用 (1)1.1.1工业机器人的发展及应用领域 (1)1.1.2工业机器人的国内外发展现状及趋势 (3)1.2焊接机器人的应用与展望 (4)1.2.1焊接机器人的发展历程 (4)1.2.2焊接机器人的应用和技术现状 (5)1.2.3焊接机器人的发展趋势 (5)1.3. Pro/ENGINEER软件系统 (7)1.3.1 Pro/ENGINEER系统概况及特点 (7)1.3.2 软件应用状况及影响 (8)1.3.3用该软件建立三自由焊接机器人零件的特点 (8)2 “慧鱼”焊接工业机器人的工作原理解析 (9)2.1慧鱼焊接工业机器人的整体设计思路 (9)2.2 “慧鱼”焊接工业机器人的工作原理 (9)3 “慧鱼”工业机器人 (12)3.1慧鱼创意组合模型的概况及运用 (12)3.2 “慧鱼”机器人的基本构件和用法 (13)3.2.1慧鱼的特点 (13)3.2.2 基本构件 (15)3.3 “慧鱼”常用机构和拓展设计 (20)4 “慧鱼”工业焊接机器人模型的建模及虚拟运动仿 (24)4.1 零件建模 (24)4.1.1 建立标准件 (24)4.1.2 参数化建模 (25)4.1.3 建立三自由度工业焊接机器人模型零件库 (26)4.2 三自由度工业焊接机器人模型装配 (26)4.3 运动仿真 (30)致谢 (33)参考文献 (34)兰州交通大学毕业设计(论文)1绪论1.1工业机器人的发展与应用1.1.1工业机器人的发展及应用领域工业机器人是一种典型的光、机、电一体化高科技产品,一般指在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。
三自由度机械臂 几何解法

三自由度机械臂几何解法三自由度机械臂是指具有三个旋转关节的机械臂。
三自由度机械臂由于自由度较低,结构相对简单,因此广泛应用于各种工业领域。
在机械臂控制中,三自由度机械臂的逆运动学问题是一项关键任务。
几何解法是一种常用的解决逆运动学问题的方法,下面将详细介绍三自由度机械臂几何解法的原理和步骤。
三自由度机械臂的几何解法是基于机械臂的几何特征和运动规律进行求解的。
几何解法的基本思想是通过已知的末端执行器的位置和姿态信息,反推出各个关节的角度值。
下面是三自由度机械臂几何解法的具体步骤:1. 定义坐标系:首先需要建立适当的坐标系,以便描述机械臂的运动和位置。
通常会选择一个固定的坐标系作为基座,然后为每个关节和末端执行器分别建立坐标系。
2. 建立正运动学模型:根据机械臂结构和各个关节的运动规律,建立机械臂的正运动学模型。
正运动学模型描述了末端执行器的位置和姿态信息与各个关节角度之间的关系。
3. 求解逆运动学方程:逆运动学方程描述了末端执行器位置和姿态信息与各个关节角度之间的关系。
通过将正运动学模型进行反推,可以得到机械臂的逆运动学方程。
4. 解算关节角度:根据已知的末端执行器位置和姿态信息,将求得的逆运动学方程带入到方程中,通过求解方程组可以得到关节的角度值。
需要注意的是,由于三自由度机械臂的自由度较低,所以通常可以使用解析解来求解逆运动学问题。
解析解是指通过对逆运动学方程进行数学分析,求得解的具体表达式。
然而在某些情况下,由于机械臂的几何结构较为复杂或者存在奇异位姿等特殊情况,可能无法得到解析解,此时可以使用数值解法来近似求解。
在使用几何解法求解三自由度机械臂的逆运动学问题时,需要注意选择合适的坐标系和姿态表示方法,并避免出现奇异点。
此外,还需要考虑机械臂的运动范围和约束条件,以确保求解出来的关节角度值在可行范围内。
总结起来,三自由度机械臂几何解法是一种常用的解决逆运动学问题的方法。
通过建立正运动学模型和逆运动学方程,可以求解出机械臂的关节角度值,从而实现对机械臂的控制。
慧鱼实验报告
慧鱼机器人模型组装综合实验五、实验步骤(1)慧鱼模型名称及工作过程避障机器人(2)模型组件选择柱、块:固定支撑和机器人实体搭建;板:一侧具有平滑表面,通常用于制作平台或装饰;轮孔条:可用于轴、连杆等组件的支撑;连接件:在结构制作中起到衔接的作用。
连杆、链条、履带、齿轮、齿条、涡轮、蜗杆、凸轮、弹簧、曲轴、万向节等9V双向直流电机、按钮、灯、接线插头、光敏晶体管、电磁阀、接口板等储气罐、气缸、活塞、气弯头、电磁气阀、气管(3)模型组件组装【提示】:①各个组件之间是如何连接的;②组件连接中有哪些注意事项。
可以附模型装配图。
构件连接方式:基本构件采用燕尾槽插接方式连接,可实现六面拼接,可多次拆装。
确保构件要到位,不滑动;注意电子元件正负极,接线稳定可靠不松动;整体美观,布线规范。
2.后退子程序:将模块中的马达输出M1和M2的速度调为4,方向为顺时针旋转。
3.左转子程序:将模块中的马达输出M1和M2的速度调为4,其中M1的运动方向为逆时针旋转、M2的运动方向为顺时针旋转。
4.停止子程序:将电动机M1和M2的动作状态调为停止。
5.避障子程序:设置距离传感器D1的判断距离即:D1<12cm,若距离不小于12cm则程序从Y/N分支的N分支出来→M4灯灭→程序结束。
而若距离小于12cm则程序从Y/N分支的Y分支出来→M4灯亮→智能车停止→延时1S →智能车后退;距离传感器继续判断距离,判断条件:D1>13 cm,如果距离不小于13cm则程序回到判断起点,继续循环。
反之,程序从Y/N分支的Y分支出来→智能车停止→智能车左转→延时0.5S→程序结束。
6.循线子程序:程序开始→智能车左转→循环计数开始,循环计数从=1开始,判断计数器的数值是否大于预定的循环计数10,若不大于10则从(N)口出→轨迹传感器I3开始判断,若搜寻到轨迹→M3灯亮→智能车停止→子程序出口;若未搜寻到轨迹→判断轨迹传感器I4是否搜寻到轨迹,若搜寻到轨迹→M3灯亮→智能车停止→子程序出口;若I4未搜寻到轨迹→M3灯灭→循环计数器开始→连接避障子程序→若遇到障碍,执行避障程序,然后返回程序入口;若未遇到障碍,则循环计数+1。
三自由度机械手结构与原理研究
题目:三自由度机械手结构与原理研究学院:轻型产业学院专业:电气工程及其自动化姓名:丛榆坤指导教师:蔡小五完成日期:2014年5月11日毕业论文任务书毕业论文题目:三自由度机械手结构与原理研究选题意义、创新性、科学性和可行性论证:近年来,我国乃至世界三自由度机械手发展十分迅速,其数量和规模不断提高,所以对三自由度机械手的熟知变得愈发重要。
为体现出三自由度机械手的现实价值,在此我们对三自由度机械手结构设计与工作原理做一细致分析。
主要内容:基于对三自由度机械手的结构与原理分析,通过编写相关程序控制机械手运动。
首先,了解机械手的发展现状;其次,对其硬件的选择及软件的使用做一说明;最后,通过实验,使理论与实际相结合,观察机械手的运动状况。
目的要求:为了培养学生在实践中运用所学的专业知识,强调理论联系实际的学习态度,提高分析问题和解决问题的能力。
培养学生掌握计算机操作技术,运用计算机编写程序进行模拟操作。
计划进度:1. 毕业论文选题(2013.09.01~2013.10.31)2. 确定毕业论文写作提纲(2013.11.01~2013.12.31)3. 形成毕业论文初稿(2014.01.01~2014.02.28)4. 形成毕业论文修改稿(2014.03.01~2014.04.30)5. 形成毕业论文终稿(2014.05.01~2014.05.18)6. 答辩(2014.05.19~2014.05.26)指导教师签字:主管院长(系主任)签字:年月日辽宁大学本科毕业论文(设计)指导记录表论文题目三自由度机械手结构与原理研究学生姓名丛榆坤学号102703104 年级、专业2010级电气工程及其自动化指导教师姓名蔡小五指导教师职称副教授所在院系轻型产业学院第一次指导(对确定题目、毕业论文(设计)任务书的指导意见):确定论文题目为:三自由度机械手结构与原理研究独立查阅毕业论文资料。
围绕课题题目收集、阅读有关文献资料。
三自由度机械手设计说明书

三自由度机械手【中文摘要】在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机械手等。
而机械手是相对较新的电子设备,它正开始广泛应用于各个领域。
本设计为三自由度直角坐标型下棋机器手,其工作方向为三个直线方向。
在控制器的作用下,它实现的是将棋子从棋盘上A拿棋子到棋盘B位置这一简单的动作,本文是对整个设计工作较全面的介绍和总结。
【关键词】三自由度,直角坐标,机械手,爪部,丝杠,齿条。
Robotic manipulator with Three-Degree-of-Freedom Abstract: Industrially, automatic control systems are found in numerous applications, such as automation machine tool control, computer systems and robotics. Industrial robots are relatively new electromechanical devices that are beginning to change the appearance of modern industry. This scheme introducedacylindricalrobot for three degree of freedom. It is composed of three linear axes current control only allows these devices move from one assembly line to other assembly line in space, perform relatively simple tasks. This paper is more comprehensive introduction and summing-up for the for the whole design work.Key words:three degrees of freedom, cylindrical, mechanical hand.目录第一章绪论 (1)1.1概述 (1)1.2特点 (1)1.3国内外研究现状 (2)第二章总体设计 (4)2.1 机械手的组成及各部分关系概述 (4)2.2机械手的设计分析 (7)2.2.1 设计要求 (7)2.2.2总体方案拟定 (7)2.2.3 机械手主要技术性能参数 (8)第三章机械手的机械系统设计 (10)3.1 机械手的运动系统分析 (10)3.1.1 机械手的运动概述 (10)3.2机械手的执行机构设计 (11)3.2.1 末端执行机构(爪部)设计 (11)3.2.2手臂机构的设计 (14)3.2.3 腰部和基底设计 (17)3.2.4步进电机和轴承的选取 (20)第四章控制系统简述 (23)4.1 控制流程 (23)4.1.1 运动过程分析如下表4-1 (23)4.1.2 机械手的运动和执行过程如图4-1 (23)4.2 控制方式 (24)第五章机械手运行时应采取的安全措施 (25)5.1 操作以及安全要求 (25)第六章整体评价以及心得体会............................ 错误!未定义书签。
慧鱼

慧鱼机器人简介慧鱼模型1964年,慧鱼创意组合模型(fischertechnik)诞生于德国,是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。
慧鱼模型背景及构成机器人这个词,第一次出现在Carel Capek 1923年的小说《Golem》(有生命的假人)中,这个人造的主人公因其高超的本领代替了人。
上个世纪的三四十年代,机器人多少更像一种自动机器。
以至于今天,当我们回顾人们曾用闪光灯作为机器人的眼睛从而使其具有人类特点的种种尝试,总会让人忍俊不禁。
这些机器几乎没有什么“智能化”或者“灵活性”可言。
随着控制学对机器人技术的影响日益深刻,机器人的设计也伴随电子电路的出现而越发接近现实了。
直到今天,机器人的智能化仍然是许多公司、科研院所和高等学校不断研究和探索的重要课题。
自动化控制理论(Cybernetics)为解决这一问题带来了生机。
“自动化控制”一词来源于希腊语(Kybernetes)。
原意指的是希腊轮船上领航员,其任务是指挥航行方向并绘制到达目的地的航行路线。
无疑,自动化控制理论本来是要使机器人变聪明。
但是如何实现呢?我们先用一个启发式实验进行说明。
我们可能都观察过飞蛾趋光的特点,飞蛾找到光源,向那里飞去,即使非常近的距离,也绝不会拍打到光源。
显然飞蛾之所以能够这样做,是因为它发觉光源,划出路线然后再向其扑去。
这本领是基于这种昆虫自身具备的机敏的行为模式。
现在我们将上述能力应用到一个技术系统中。
先用光学传感器探测到光源,马达执行动作,这样,我们必须在发现信号和执行信号之间建立一个合理的连接,即程序。
20世纪50年代,一位名叫沃特格雷(Walter Grey)的英国人将上述引人思考的实验付诸于实践。
基于慧鱼模型的无碰撞避障机器人研究

机器人是在踪迹 传感 器的 基础 上沿 着一 条黑 线 (白 色背 景 )或白线 (黑 色背 景 )行 走的 , 踪 迹 传感 器有 两 个数 字 输入 端 , 当两个数字输入端同时有信号时 , 表明 机器人在线上 , 有一 个或两个没信号 , 则说明 机器人 偏离轨 道 , 需 进行调 整 。 我们 设计的是方格循 线法 , 现 在 以黑 线白 色背 景为 例来 说明 它的 工作原理 。
3 系统软件设计
软件系统对记录 的信息进 行分析 , 生成 各种需 要的报 表 , 完成目前履历本的功 能 , 实 现履历本 的电子 化 ;依据采 集信息 对航空军械装备进行 状态评估 。
系统软件结构如 图 3所示 。 软件负责分 析处 理信 息记 录单 元记 录的 信息 , 主 要 依据 三方面功能来设计 : 1)统计载机 、发射装置 、军械装备的工作状态 , 工作时机 ; 2)记录各工作 状态 的起 始时 间 、结束 时 间 、累计 时间 , 生 成各种报表 ; 3)状态评估 。 一是检验设 备有无 故障 ;二是如 果有故 障 , 确定故障发 生的 位置 。 操作 系统 作为 工作 的基 本平 台 , 提供 与用户交互的图形界 面 (GUI);数 据管理 系统 存储基 本信 息 , 可统计查询及生 成各 种报 表 ;辅 助管 理系 统的 主要 功能 是进 行用户管理和系统设 置 ;系 统一旦运 行即建 立动态 日志 , 以记 录系统的使用情况 , 便于出 现问题时 进行查 询校验 ;状 态评估 系统按照测试结果进 行评估 , 且当航 空装备 发生故 障时 , 可以 为维护人员查找和排 除故障提供参考 。
该方法研究 的结 果将 来在 部队 推广 和加 装应 用 , 小型 化 是不可回避 的研 究内 容 。 在达 到现 有技 术 性能 的情 况下 , 在 总体 设计 、结构 设计 、器 件选 择等各 方面 综合考 量 , 满足 小型 化需求 。 4.3 航空军械装 备信息提取与处理技术
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“慧鱼模型”三自由度机械手设计小册学院:机电工程学院班级:机械设计与制造指导老师:姓名:学号:************一、概述 (1)1.1机电一体化技术 (1)1.1.1机电一体化技术的定义和内容 (1)1.1.2机电一体化系统组成 (1)1.2. 慧鱼机器人 (2)1.2.1慧鱼创意教学组合模型简介 (2)二、机器人的组成 (3)2.1组成构件 (3)2.2慧鱼机器人分析 (6)2.2.1机器人机构组成 (6)2.2.2主要成分构成及功能 (7)2.3. 机器人的工作空间形式 (9)2.4机器人的机械运动形态和变换控制 (11)2.5机器人的位移、速度、方向的控制方法 (13)一、概述1.1机电一体化技术1.1.1机电一体化技术的定义和内容机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
1.1.2机电一体化系统组成1.机械本体机械本体包括机架、机械连接、机械传动等,它是机电一体化的基础,起着支撑系统中其他功能单元、传递运动和动力的作用。
2.检测传感部分检测传感部分包括各种传感器及其信号检测电路,其作用就是检测机电一体化系统工作过程中本身和外界环境有关参量的变化,并将信息传递给电子控制单元,电子控制单元根据检查到的信息向执行器发出相应的控制。
3.电子控制单元电子控制单元是机电一体化系统的核心,负责将来自各传感器的检测信号和外部输入命令进行集中、存储、计算、分析,根据信息处理结果,按照一定的程度和节奏发出相应的指令,控制整个系统有目的地进行。
4.执行器执行器的作用是根据电子控制单元的指令驱动机械部件的运动。
执行器是运动部件,通常采用电力驱动、气压驱动和液压驱动等几种方式。
5.动力源动力源是机电一体化产品能量供应部分,是按照系统控制要求向机械系统提供能量和动力使系统正常运行。
提供能量的方式包括电能、气能和液压能。
1.2. 慧鱼机器人1.2.1慧鱼创意教学组合模型简介1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
它是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。
它由各种型号和规格的零件构成,类似于积木。
零件的种类很多,几乎包括了机械课程和日常生活中的所有零件,如机械零件:连杆、凸轮、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮等)、蜗轮、蜗杆、螺杆、铰链、带、链条、轴(直轴和曲轴)、联轴器、弹簧、减速器、齿轮箱、车轮等;电气零件:直流电机、灯泡、电磁气阀、行程开关、传感器(光敏、热敏、磁敏、触敏)、可调直流变压器、电脑接口板、PLC 接口板、红外线发射接收装置等;气动零件:储气罐、汽缸、活塞、气弯头、手动气阀、电磁气阀、气管等。
由这些零件的不同组合便可构造出各式各样的模型,这些模型主要可分为两大类:技术组和机器人组。
技术组又包括传感器技术组、气动技术组、汽车技术组、太阳能技术组、万能组合包。
机器人组又包括3D 机器人、计算机器人、实验机器人、工业机器人、移动机器人和气动机器人。
在慧鱼实验过程中,通过对各类模型的认识和组装,从而可以熟悉并掌握各类机械设备和自动化装置的常用结构和工作原理。
在模型的组建中,将运用到机械加工、气动技术、电子电路和软件编程等知识,从而加深了对这些相关课程的理解。
另外通过慧鱼模型的搭建和组装也培养了实际动手的能力、解决实际问题的能力和创新设计的能力二、机器人的组成2.1组成构件2.2慧鱼机器人分析此次机电一体化创新设计项目,我们所完成的是慧鱼工业机器人中的三自由度机械手,它能够通过智能控制接口盒的编程控制实现三个自由度方向(旋转、水平、垂直)的夹取或放置物品,因此操作范围大,灵活性好。
2.2.1机器人机构组成如图2.1所示,该机器人为三自由度机械手,其机械手爪有夹紧和松开物件的功能,由三个电机驱动三个自由度的运动,由一个电机控制手爪的夹紧和松开。
可实现整体的旋转、水平、垂直运动及手爪的夹紧、松开运动。
该机械人可通过PC 对控制芯片进行编程,从而输出控制信号到各电机,驱动机械人的运动方向或行程,从而夹取或放置物件。
图2.1 机械手机构组成2.2.2主要成分构成及功能1、机械手基座旋转运动图2.2.1机械手基座旋转运动UG模型图该运动主要构件有电动机、减速箱、蜗杆、齿轮。
2.机械手水平运动图2.2.2机械手水平运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、丝杆、螺旋传动块、导杆。
3、机械手垂直运动图2.2.3机械手垂直运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、丝杆、螺旋传动块、连杆机构4、机械手爪夹紧与松开运动图2.2.4机械手爪夹紧与松开运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、传动轴、万向铰链、螺旋传动块、连杆机构。
2.3. 机器人的工作空间形式该机器人的工作空间形式主要有三个自由度的运动和机械手爪的夹松运动。
1、自由度一:机械手基座的旋转运动,如图2.3.1所示图2.3.1 机械手基座的旋转运动电机输出动能,经减速箱调节速度并传递到蜗杆,蜗杆与齿轮啮合传动,齿轮转动带动整个底座进行旋转运动。
2、自由度二:机械手的水平运动,如图2.3所示图2.3.1机械手的前后运动电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为工作台的前后运动。
3、自由度三:机械手的垂直运动图2.3.2机械手的上下运动电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为水平前后运动,最后经连杆机构转化为机械手的上下运动4、机械手爪的夹紧与放松运动图2.3.3通过上面的电机控制开夹图2.3.4机械手夹紧与放松运动电机输出动能,经减速箱调节速度并传递到传动轴,不同轴线的各传动杆通过万向铰链进行连接并传递动力,最近将杆件的旋转运动通过螺旋机构转化为手爪的夹紧或松开运动。
2.4机器人的机械运动形态和变换控制1、机械手基座的旋转运动如下图所示,传动方式为:控制信号—电机—减速箱—圆柱蜗杆传动—基座电动机减速箱图2.4.1机械手基座的旋转运动机构简图2、机械手的水平运动如下图所示,传动方式为:控制信号—电机—减速箱—螺旋机构—机架图2.4.2机械手的前后运动机构简图3、机械手的垂直运动如下图所示,传动方式为:控制信号—电机—减速箱—螺旋机构—连杆机构—机架图2.4.3机械手的垂直运动机构简图电动机 减速箱电动机 减速箱4、机械手爪夹紧与放松运动如下图所示,传动方式为:控制信号—电机—减速箱—传动轴—万向铰链—传动轴—螺旋机构—连杆机构—手爪电动机夹紧气缸图2.4.4机械手爪夹紧与放松运动机构简图2.5机器人的位移、速度、方向的控制方法该机器人整体与控制芯片盒连接,并通过PC的程序编制与载入,将控制信号输送到电机。
其中速度控制信号将控制电机的速度从而实现机器人的运动速度转变,并且时间控制信号将于速度控制信号配合实现机器人的运动位移量可调。
为了防止超出行程,各主要机械运动构件附近安装有限位行程开关,以限制运动的极限位置,同时也是运动的起始位置;当各运动构件运动碰到两边的限位行程开关后,机器人将停止运动。
1、机械手基座的旋转运动位移速度控制动力源(电机)接收到控制芯片的位移速度控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
动力输出轴通过蜗轮机构将动力转换为基座齿轮的转动。
躯干的理论旋转范围为0°~360°。
2.机械手的水平运动位移速度控制动力源(电机)接收到控制芯片的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
然后动力轴的转动通过螺旋机构转化为机架的水平前后运动。
3、机械手的垂直运动位移速度控制动力源(电机)接收到智能控制接口盒的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
减速箱输出动力到丝杆,再通过螺旋机构转化为机架的前后水平运动,最后通过连杆机构转化为机械臂的上下摆动。
4、机械手爪夹紧与放松运动位移速度控制动力源(电机)接收到控制芯片的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
减速箱输出动力到传动轴,各传动轴因轴线不在同一水平线上故需通过万向铰链连接,最后传递到螺旋机构,带动连杆机构从而形成机械手爪的夹紧与松开运动。