风力发电机滑动偏航系统载荷特性分析
对风电机组偏航系统、性能异常及检修方法的分析

对风电机组偏航系统、性能异常及检修方法的分析发布时间:2021-08-17T03:25:00.624Z 来源:《科技新时代》2021年5期作者:李家运[导读] 其原理就是自然界中的风力吹动风电机组的转动,使得风能转化为电能从而来达到发电的目的。
江西大唐国际新能源有限公司江西省南昌市 330038摘要:风力发电是新时代下新能源开发的重点项目之一。
在当前能源需求量越来越大的新形势下,风力发电的作用越来越凸显,因此,保障风力发电系统的安全运行是一项极其重要的工作。
偏航系统是风力发电系统中的主要装置之一,其性能的优劣直接影响到风电生产的质量和安全性。
本文从风电机组偏航系统理论及构造入手,在分析了偏航系统异常情况及其故障原因的基础上,就其性能数据的筛选及检修策略进行了重点探究,以供参考。
关键词:风电机组;偏航系统;性能异常;检修方法1.引言自然界中的风力作为一种可再生循环利用资源,对人们在能源方面的利用有着非常重要的影响。
随着我国综合实力的飞速发展以及科学技术的不断进步,我国对可再生能源、清洁能源逐渐重视了起来,对于能源的使用方式与环境的保护理念也慢慢的成熟了起来,现在我国大力提倡发展绿色环保经济的理念,由此可以看出清洁能源、可再生能源在我国未来的日子里使用所占的比重会逐渐的提高。
风力发电就产生清洁能源的一种方式,其原理就是自然界中的风力吹动风电机组的转动,使得风能转化为电能从而来达到发电的目的。
我们来了解一下风力发电机组,风力发电机组是由一系列的部件所构成的,其中就包括发电机、风轮。
风力发电机因为分类标准的不同也会有不同的类型,大概分为三种类型,第一种是根据叶片数量的不同分为双叶片、三叶片、多叶片机组,第二种是根据电机的传动结构分为直驱和双反馈机组,第三种是根据功率控制的类型分为主动变桨变速型与定桨失速型机组。
风力发电机组在进行发电的时候最为重要的就是要保持输出电频率的长久稳定,这对于风机并网发电还是风光互补发电都是非常必要的。
风力发电机组风荷载分析及优化设计
风力发电机组风荷载分析及优化设计一、引言风力发电是目前可再生能源中占据相当重要位置的一种,风力发电机组也是其重要组成部分之一。
与其它工程系统相比,风力发电机组主要面临的挑战之一就是大风荷载下的稳定性能。
本文将从风荷载分析及优化设计方面探讨如何提升风力发电机组的稳定性能。
二、风荷载分析1. 风荷载形式在风力发电机组中,风荷载主要是指风及其产生的风力作用在风轮及其支撑系统上所形成的荷载。
根据气象学研究,风力可以分为三种形式:切向风、径向风和上升气流。
其中最主要的当属切向风,即来自于风速分量沿风轮叶片切线方向的力。
2. 风荷载计算风荷载的计算一般可以采用下列方法:(1)椭圆轨迹法:将风力作用点看成一个运动点,其受到的风荷载所形成的作用线经过研究后发现是椭圆形的,最大荷载所在位置即为椭圆的焦点之一。
(2)风口逆推法:通过揭示叶片在不同风速下的变形规律和受力行为,得到了叶片结构变形和受力响应的特性参数,然后结合气象物理及气动特性等,经过逆推出风速下叶片受力情况,进而计算出整机的风荷载。
(3)场合适法:利用CAD软件建立计算模型,通过模拟流场中流动场、压力场等参数,综合考虑叶片的材料、形状、缆索布置、叶根安装等影响因素对风力发电机组的激励能力进行模拟计算。
3. 风荷载分析结果及优化设计通过以上方法得出的风荷载分析结果可以用于进行稳定性分析,并通过优化设计降低风荷载带来的影响。
优化设计中主要包括以下几个方面:(1)优化叶片结构由于叶片是风能转换核心部分,因此叶片的结构及其质量直接影响到发电机组的稳定性。
叶片的优化设计可以包括减轻质量、改变叶形和优化叶片布局等方面。
(2)优化筒杆和传动系统筒杆和传动系统也是风力发电机组中非常重要的部分,优化设计主要包括减小振动、降低噪声、提高精度等方面。
(3)优化弹性支撑系统由于受到风荷载影响,风力发电机组的整体振动会加剧,导致叶片与塔筒之间的摩擦和磨损加剧,从而降低系统的使用寿命。
风力发电——基于Simpack的风力发电机组偏航系统动态特性分析

基于SIMPACK的风力发电机组偏航系统动态特性分析内容提要:偏航系统是水平轴风力发电机组的重要组成部分,其主要作用是使风轮叶片始终处于迎风位置,同时提供了风电机组安全运行和停机状态所需要的锁紧力矩。
偏航系统性能的好坏直接决定了风力发电机的发电质量和风能利用率的高低。
因此研究风电机组运行时偏航系统的动态特性是风力发电机组设计中的重要任务之一。
本文以3.0MW风力发电机组中的偏航系统为研究对象,根据多体系统动力学理论,设计偏航系统结构拓扑图,使用多体动力学软件SIMPACK 建立其动力学模型,分析研究风力发电机偏航过程中偏航齿轮传动系统的动力学特性。
为风机偏航系统齿轮间的运行情况的影响方面提供了一定的参考依据,对风力发电机组设计具有指导意义。
1、前言随着风能利用的兴起,兆瓦级风力发电机组成为主流的风力发电设备。
由于风向的时刻变化,风力发电机组偏航系统在启动与刹车状态之间变化频繁,受载情况与工作环境复杂,因此在设计制造与使用过程中有着极高的结构要求[1],为了系统的研究风力发电机组偏航时的动态特性,本文运用多体动力学方法对风机偏航时偏航系统的动态特性进行仿真分析。
这对偏航系统齿轮的齿轮强度和可靠性设计具有重要指导意义。
2、偏航系统结构参数偏航系统是水平轴风力发电机组的至关重要组成部分[2]。
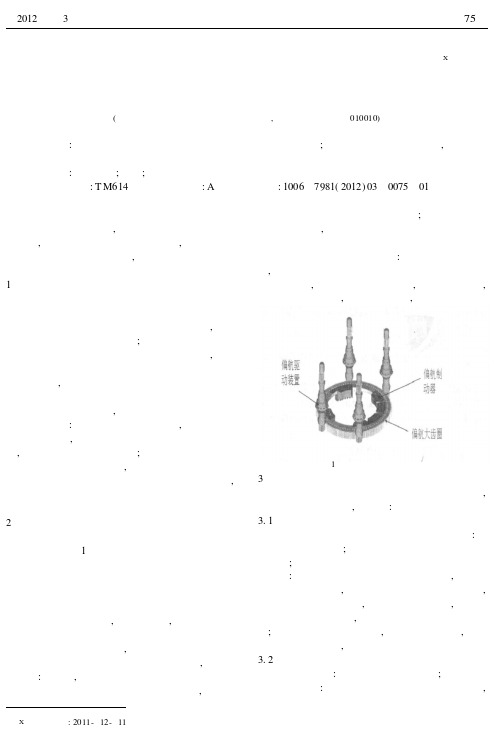
对于大型并网水平轴风力发电机组来说,其主动偏航系统机构大体包括以下几个部分:偏航轴承、偏航制动装置、偏航驱动装置和偏航保护装置等[3]。
本文所选机组采用内齿式偏航系统,通过输出轴上的小齿轮与轴承内圈齿轮啮合,以推动机舱旋转,达到偏航目的[3]。
3MW 风力发电机组采用六个偏航驱动方式,以保证在提供足够转矩的前提下,尽可能保持机舱平稳运动。
具体偏航驱动分布的形式如图2-1 所示。
图2-1 偏航齿轮装配图本文以3MW 风力发电机组偏航系统齿轮副进行研究。
偏航齿轮系统是由六个与减速器相连的小齿轮同时与偏航轴承内圈大齿轮相啮合构成的,六个小齿轮在大齿轮周围呈轴对称分布。
大型风力发电机组偏航系统介绍及故障分析
大型风力发电机组偏航系统介绍及故障分析X王晓东(中广核风力发电有限公司内蒙古分公司,内蒙古呼和浩特 010010) 摘 要:阐述了风力发电机组偏航系统的作用、结构和工作原理;分析了偏航系统常见故障,提出了解决方法。
关键词:风电机组;偏航;故障分析 中图分类号:T M614 文献标识码:A 文章编号:1006—7981(2012)03—0075—01 偏航系统是风力发电机组特有的控制系统。
对于水平轴风力发电机组,为了能达到最佳的风能利用效率,应使叶轮跟踪变化稳定的风向,因此需要一个系统装置使叶轮正面对风,这套装置通常称为“偏航系统”。
1 偏航系统作用风力发电机组的偏航系统一般分为主动偏航系统和被动偏航系统。
被动偏航指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有尾舵、舵轮和下风向三种;主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,常见的有齿轮驱动和滑动两种方式。
对于并网型风力发电机组来说,通常都采用主动偏航的齿轮驱动形式。
大型风力发电机组常采用电动的偏航系统来调整机组并使其对准风向,风力发电机的偏航系统作用主要有两个:一是当风的方向变化时,能够快速平稳地对准风向,这样可以使叶轮跟踪变化稳定的风向,以得到最大的风能利用率;二是由于风力发电机组可能持续一个方向偏航,为了保证机组悬垂部分的电缆不至于产生过度的纽绞而使电缆断裂、失效,在电缆达到设计缠绕值时能够自动解缆。
由此可见偏航系统在风力发电机组中的作用非常大。
2 偏航系统的组成及工作原理偏航系统是由偏航控制机构和偏航驱动机构两大部分组成。
图1为风电机组的偏航系统结构图。
偏航控制机构包括风向传感器、偏航控制器、解缆传感器等几部分。
偏航驱动机构一般由驱动电机、偏航行星齿轮减速器、传动齿轮、偏航轴承、回转体大齿轮、偏航制动器等几部分组成。
偏航驱动机构在正常的运行情况下,应启动平稳,转速均匀无振动现象。
偏航轴承的轴承内外环分别与机组的机舱和塔架连接器用螺栓连接,轮齿可采用外齿或内齿形式。
海上风力发电偏航系统的可靠性分析与优化

海上风力发电偏航系统的可靠性分析与优化随着全球对可再生能源的需求不断增加,海上风力发电作为一种环保、可持续的能源解决方案,受到越来越多国家的重视。
然而,由于其特殊的工作环境和复杂的运行条件,海上风力发电偏航系统的可靠性成为一个重要的挑战。
本文将对海上风力发电偏航系统的可靠性进行分析,并提出一些优化措施,以提高其运行的可靠性和可用性。
首先,对海上风力发电偏航系统的可靠性进行分析是至关重要的。
偏航系统是风力发电机组的核心部件之一,其主要用途是使风力发电机组能够自动对准风向,以充分获取风能并保持机组的稳定运行。
然而,在海上的复杂环境中,偏航系统容易受到海浪、风速变化、腐蚀、电气故障等因素的影响,从而降低了系统的可靠性。
针对海上风力发电偏航系统的可靠性问题,我们可以从以下几个方面进行优化。
首先,对系统的结构进行优化设计,以提高系统的稳定性。
可以采用更高强度的材料,使系统能够更好地抵抗海浪冲击和风力载荷,并对关键部件进行冗余设计,以防止单点故障对整个系统的影响。
其次,针对海上环境中的腐蚀问题,我们可以加强对偏航系统的防腐蚀措施。
可以使用耐腐蚀材料,如不锈钢,对关键部件进行涂层处理,以防止海水对部件的腐蚀和损坏。
此外,定期进行检查和维护,及时修复和更换受损的部件,也是提高系统可靠性的重要手段。
另外,对偏航系统的电气部分进行优化是提高系统可靠性的关键。
可以采用双电源供电系统,确保在一方电源故障时能够迅速切换到另一方电源,以保持系统的正常运行。
此外,对电气部件进行严格的质量控制和测试,以确保其符合相关的安全标准和可靠性要求。
同时,建立完善的监测和报警系统也是提高海上风力发电偏航系统可靠性的重要手段。
可以利用传感器和监控设备对偏航系统关键参数进行实时监测,并设置相应的报警机制,以便在发生故障或异常时及时采取措施,避免进一步的损害。
此外,对于海上风力发电偏航系统的维护和保养也是保障其可靠性的关键环节。
定期进行维护,包括润滑、紧固螺栓、更换磨损部件等,确保系统的正常运行。
风电机组滑动式偏航系统动力学分析

风电机组滑动式偏航系统动力学分析作者:王明安利强张家旗张志强来源:《风能》2015年第02期偏航系统可以保证风电机组的叶轮始终处于正面迎风状态,从而能够以最大的效率利用风能,提高发电效率。
滑动式偏航机构可以承受更大的荷载,而且省去了刹车及液压装置,逐渐被兆瓦级风电机组采用。
但是由于机舱的重力载荷较大、叶片的气动载荷受风随机性的影响而变化复杂,从而导致滑动式偏航系统的滑动块与大齿圈间的摩擦阻尼情况复杂,容易导致偏航减速机载荷过大或滑动块磨损等故障。
某2MW风电机组出现了偏航大齿圈磨损严重、风电机组偏航减速箱内部轮齿折断现象。
因此,为了保证风电机组运行的稳定性,需要对风电机组的偏航系统的动态特性进行研究。
对兆瓦级风电机组偏航系统的工作特性,从运动摩擦学原理进行考虑,分析偏航系统的振动特性;从偏航组件的力学强度特性角度考虑,研究偏航组件受载的强度特性和疲劳特性;还有基于偏航控制原理,建立了偏航控制模型,这些成果为研究兆瓦级风电机组偏航系统的工作特性做出了一些成果。
本文以某2MW风电机组出现偏航系统故障为背景,通过Bladed软件模拟出22m/s风速下,不同的偏航速度、偏航角度和有无湍流四种工况下的风载荷,将其以数据文件形式导入到不同工况下的偏航系统的ADAMS模型中,求解出相应的偏航总驱动力矩,并将得到的偏航总驱动力矩通过均等处理分配到偏航减速箱中,作为偏航减速箱的负载力矩输入,分析偏航角度、偏航速度和风速对偏航减速箱的力学特性影响。
滑动式偏航系统滑动式偏航系统主要由机舱、偏航减速箱、偏航轴承、大齿圈、偏航小齿轮等组成。
其偏航动作为:电机驱动偏航减速箱,带动偏航小齿轮运动,偏航小齿轮与固定在塔架上的大齿圈相互啮合,在滑动式偏航轴承作用下,机舱开始缓慢绕塔架中心旋转,实现偏航动作。
一、偏航减速箱模型偏航减速箱的主要作用是增大减速箱输出端转矩,驱动机舱缓慢平稳的偏航。
该减速箱采用一级涡轮蜗杆机构和三个NGW式行星轮系串联的减速机构。
风力发电机组偏航系统探究与优化

风力发电机组偏航系统探究与优化摘要:可再生能源的异军突起,风力发电被广泛应用,风力发电机组的容量己普遍达到兆瓦级别,因此风力发电机组的稳定性尤为重要,尤其是偏航系统,偏航系统对风的准确性直接影响机组的发电效率。
目前风力发电机组关于风向偏航控制主要是基于风向标进行的控制,而风向标的控制误差值较大,还有风向标控制的相关数据都是非线性的。
也就是说在小范围以内,风向标的控制精度较低,影响了风电机组对风能的获取。
因此探讨怎样提高对风精度,对进一步增加发电量具有重要意义。
所以,偏航控制技术的探究和优化,对改善风能捕捉、确保机组安全使用具有一定现实意义。
1本文的研究意义主要体现(1)有效缓解风力发电机组在使用中出现运行不稳定的情况;(2)小范围风向变化以内,缓解风向标的控制精度较低的情况,提高对风精度,增加发电量。
(3)改善风能捕捉、确保机组安全使用。
2风电机组的三种控制技术定桨距控制技术:机组桨叶的桨距角受安装位置等限制保持一个定值,许可的风速变化范围以内,控制系统则不会做出具体控制,技术简化明了。
变桨距控制技术:在机组刚启动运行时就可以实现对转速的跟踪控制,并网以后实现对功率的跟踪控制,大大改善了机组风机的启动特性以及功率变化情况。
变速恒频技术:跟踪控制机组的转速和功率,而直接以采集到的风速信号为机组控制的输入量来跟踪变化,当机组在额定风速以下运行时,可以达到最优功率变化的跟踪控制,这样可以保证风电机组获得最大的风能资源,提高风能利用率;当机组在额定风速以上运行时,变速控制可以使得控制系统更具有柔性,进而确保系统输出稳定的功率。
3偏航系统概述1.偏航系统。
风力发电机组要在最佳的载荷情况下最大限度的捕获风能,输出较多的电量,必须要保证机组在安全的环境下正常稳定地运转工作,在风力发电机组控制系统研究时,变桨的动作和发电机的转速相关,而风向的特性和偏航系统相关,偏航系统的控制是通过风向标实现的。
利用风向标传感器来监测风的方向,偏航控制器通过采集监测到的风信号,并分析判断风信号和风轮轴向之间的偏移角度,然后输出偏航控制信号,从而带动机组将叶轮的轴向和风向位置调整到同一位置上,进而实现对风目的。
风力发电机及偏航系统

政策法规对产业发展影响分析
补贴政策
政府对风力发电产业的补贴政策,包括上网电价补贴、投资补贴等, 对产业发展起到了积极的推动作用。
税收政策
政府对风力发电产业实行的税收优惠政策,如增值税即征即退、所 得税优惠等,降低了企业的税收负担。
环保政策
政府对可再生能源和环保产业的支持政策,如碳排放权交易、绿色电 力证书等,为风力发电产业的发展提供了良好的政策环境。
多元化能源融合
未来风力发电将与其他能源形式进行 融合,形成多元化的能源供应体系。
05 行业标准与政策法规解读
国内外相关行业标准梳理
国际标准
包括IEC(国际电工委员会)制定的风 力发电机组相关标准,以及ISO(国 际标准化组织)制定的可再生能源和 风力发电相关标准。
国内标准
中国制定的风力发电机组相关标准,如 GB/T(国家推荐性标准)和NB/T(能源行 业标准)等,涵盖了风力发电机组的设计、 制造、试验、安装和运行等方面。
特点
清洁、可
风力发电机类型及结构
类型
水平轴风力发电机、垂直轴风力发电 机等。
结构
包括叶片、轮毂、齿轮箱、发电机、 塔筒、偏航系统等主要部件。
风力发电机性能指标
额定功率
发电机在额定风速下输 出的功率。
切入风速
发电机开始发电的最低 风速。
切出风速
为保护发电机而设定的 最高风速,超过此风速
机的发电量和运行稳定性。
案例二
某风电设备制造商对其偏航系统进 行了结构优化设计,降低了制造成 本并提高了市场竞争力。
案例三
某研究机构将智能化技术应用于偏 航系统,实现了对风力发电机的智 能监控和优化控制,取得了显著的 应用效果。
《风力发电机载荷分析与仿真》范文

《风力发电机载荷分析与仿真》篇一一、引言随着能源需求持续增长,风力发电因其可再生性和环境友好性成为了全球能源解决方案的重要部分。
风力发电机组的安全和性能受到载荷条件的重要影响,因此对风力发电机的载荷分析和仿真变得至关重要。
本文将对风力发电机的载荷进行分析,并使用仿真技术来评估其性能和安全性。
二、风力发电机载荷分析风力发电机的主要载荷来源包括风载荷、重力载荷、机械部件的惯性力以及塔架的动态效应等。
这些载荷直接影响着风力发电机的运行稳定性和使用寿命。
1. 风载荷分析风载荷是风力发电机的主要载荷来源,包括静态风载荷和动态风载荷。
静态风载荷主要考虑的是风的平均值,而动态风载荷则考虑了风的波动和湍流。
在分析过程中,需要考虑风的频率、速度、方向以及湍流强度等因素。
2. 重力载荷分析重力载荷是风力发电机自身重量产生的载荷,主要作用在塔架和叶片上。
设计过程中需要考虑各部分的自重,并合理分配各部分的重量,以确保结构的安全性和稳定性。
3. 机械部件的惯性力由于风力发电机的旋转部件(如发电机、齿轮箱和叶片)具有较大的质量,因此会产生较大的惯性力。
在分析和设计过程中,需要考虑这些惯性力的影响,以确保系统的稳定性和安全性。
4. 塔架动态效应塔架是风力发电机的重要组成部分,其动态效应对整体性能有重要影响。
在风力作用下,塔架会产生振动和形变,需要分析这些动态效应对结构的影响,并采取相应的措施进行优化。
三、风力发电机载荷仿真为了更准确地分析和评估风力发电机的性能和安全性,可以采用仿真技术进行模拟和分析。
常用的仿真软件包括ANSYS、ADAMS等。
1. 建立仿真模型根据风力发电机的实际结构和参数,建立仿真模型。
模型应包括风轮、发电机、齿轮箱、塔架等主要部件,并考虑各部件之间的相互作用和影响。
2. 设置仿真参数根据实际运行情况,设置仿真参数,如风速、风向、温度、湿度等。
同时,还需要设置仿真时间、步长等参数,以确保仿真的准确性和可靠性。
风电偏航系统对风力发电机组性能参数的影响分析

风电偏航系统对风力发电机组性能参数的影响分析引言:风力发电是目前被广泛应用的清洁能源之一,其中风力发电机组是核心设备。
风力发电机组的性能参数对于发电效率和发电成本具有重要影响。
而风电偏航系统作为风力发电机组的关键部件之一,对风力发电机组的性能参数也会产生一定的影响。
本文旨在分析风电偏航系统对风力发电机组性能参数的影响,并探讨其原因。
一、风电偏航系统的功能和原理风电偏航系统是指风力发电机组中用于调整发电机组转向的控制系统。
其主要功能是使发电机组总是朝向风的方向,以最大程度地利用风能。
其工作原理主要包括风向传感器测量风向的角度和风向控制器根据测量值控制发电机组转向。
风电偏航系统的有效运行对保证风力发电机组的正常发电具有重要意义。
二、风电偏航系统对风力发电机组性能的影响1. 发电效率风电偏航系统能够准确将发电机组转向风向,保证了发电机组正对风的方向,有效提高了风能的利用率。
风能利用率的提高对于风力发电机组的发电效率具有明显的影响。
实际数据分析表明,当风电偏航系统正常工作时,风力发电机组的发电量可提高10%以上。
2. 可靠性风电偏航系统作为风力发电机组的控制系统之一,对风力发电机组的可靠性具有重要影响。
一旦风电偏航系统出现故障,无法及时将发电机组转向风向,可能导致风力发电机组失去发电功能。
因此,风电偏航系统的可靠性对于风力发电机组的正常操作至关重要。
3. 安全性风力发电机组在运行过程中,如果没有风电偏航系统进行风向控制,可能出现风力过大导致发电机组损坏的情况。
风电偏航系统能够及时对风力进行感知并调整发电机组转向,从而保证机组在安全范围内运行,减少损坏和事故的发生。
4. 维护成本风电偏航系统的运行需要定期的检查和维护,以确保其正常工作。
虽然维护成本会增加一定的费用,但相比于发电效率的提升和机组的可靠性、安全性的提升,维护成本是可以接受的。
并且风电偏航系统的可维修性较好,维护过程相对简单,可以降低维护的工作量和成本。
风电机组偏航系统讲解
2008年9月4日
浙江风电公司 吴金城
5
扭缆保护
The wind turbine is therefore equipped with a cable twist counter which tells the controller that it is time to untwist the cables.
Mp——调向起动时由惯性力所引起的惯性阻力矩;
Mz——使风力机运行和调向平稳而由制动器产生的阻尼力矩
2008年9月4日
浙江风电公司 吴金城
14
偏航系统部件
2008年9月4日
浙江风电公司 吴金城
15
2008年9月4日
浙江风电公司 吴金城
16
两种偏航结构
2008年9月4日
浙江风电公司 吴金城
17
2008年9月4日
浙江风电公司 吴金城
12
2008年9月4日
浙江风电公司 吴金城
13
偏航机构设计
大型风力机调向机构的工作载荷主要是调向阻力矩。当风力机在运行过程
中,起动调向对风时,调向阻力矩M一般由下列阻力矩组成:
M=Mw+Mp+Mf+Mz
(1)
式中:Mf——作用于回转支承装置上的摩擦阻力矩;
Mw——风压力作用于机舱上所引起的风阻力矩;
当风力机在运行过程中起动调向对风时调向阻力矩m一般由下列阻力矩组成mmwmpmfmz式中m作用于回转支承装置上的摩擦阻力矩m风压力作用于机舱上所引起的风阻力矩mp调向起动时由惯性力所引起的惯性阻力矩mz使风力机运行和调向平稳而由制动器产生的阻尼力矩1152008年9月4日浙江风电公司吴金城偏航系统部件162008年9月4日浙江风电公司吴金城172008年9月4日浙江风电公司吴金城182008年9月4日浙江风电公司吴金城192008年9月4日浙江风电公司吴金城202008年9月4日浙江风电公司吴金城212008年9月4日浙江风电公司吴金城偏航齿轮222008年9月4日浙江风电公司吴金城232008年9月4日浙江风电公司吴金城偏航刹车的作用242008年9月4日浙江风电公司吴金城252008年9月4日浙江风电公司吴金城262008年9月4日浙江风电公司吴金城
风力发电机偏航控制系统的研究
风力发电机偏航控制系统的研究一、本文概述随着全球对可再生能源需求的持续增长,风力发电作为一种清洁、可再生的能源形式,已在全球范围内得到了广泛的关注和应用。
风力发电机(Wind Turbine)作为风力发电系统的核心设备,其运行效率和稳定性对于整个系统的性能至关重要。
偏航控制系统作为风力发电机的重要组成部分,对于确保风电机组的安全运行和最大化能量捕获具有关键作用。
本文旨在深入研究风力发电机偏航控制系统的原理、设计及其在实际应用中的性能表现。
文章首先介绍了风力发电机的基本工作原理和偏航控制系统的基本构成,为后续的研究提供了理论基础。
接着,文章详细分析了偏航控制系统的关键技术和控制策略,包括传感器技术、执行机构、控制算法等,并探讨了这些技术和策略对风力发电机性能的影响。
在此基础上,文章通过实验和仿真研究,评估了不同偏航控制策略在实际应用中的效果,为优化风力发电机偏航控制系统提供了有益的参考。
文章还讨论了风力发电机偏航控制系统面临的挑战和未来的发展趋势,为相关领域的研究者和工程师提供了有价值的参考信息。
通过本文的研究,期望能够为风力发电机偏航控制系统的设计、优化和应用提供有益的指导,推动风力发电技术的发展,为实现全球能源转型和可持续发展做出贡献。
二、风力发电机概述风力发电机是一种利用风能转换为电能的装置,其工作原理基于风的动力学特性和电磁感应原理。
风力发电机通常由风轮(也称为风叶或转子)、发电机、塔筒和基础等部分组成。
风轮由多个风叶组成,当风吹过风叶时,风叶受到风力作用而旋转,进而带动发电机转动,发电机中的磁场与导体产生相对运动,根据电磁感应原理,导体中会产生感应电动势,从而产生电能。
风力发电机具有清洁、可再生、无污染等优点,是当前全球范围内大力推广的可再生能源发电方式之一。
风力发电机的装机容量和单机容量不断增大,技术也在不断进步,从最初的定桨距失速型发展到变桨距调节型,再到目前最先进的主动偏航控制系统,风力发电机的性能和稳定性得到了显著提升。
海上风力发电偏航系统的振动特性分析与优化设计

海上风力发电偏航系统的振动特性分析与优化设计海上风力发电偏航系统的振动特性与优化设计引言:海上风力发电作为一种清洁能源的重要来源,具有广阔的发展前景。
然而,海上风力发电设备在海洋环境中面临着复杂多变的挑战,其中之一就是偏航系统的振动问题。
本文将对海上风力发电偏航系统的振动特性进行分析,并提出优化设计方案,以提高系统的可靠性和稳定性。
1. 引言海上风力发电偏航系统的作用和重要性海上风力发电偏航系统是风力涡轮机在风向变化时调整转向以最大程度利用风能的关键部件。
其作用在于确保风力涡轮机始终面向风向,并通过控制偏航角度来实现风能的最大化,提高发电效率。
因此,偏航系统的可靠性和稳定性对于海上风力发电的长期运行和维护至关重要。
2. 海上风力发电偏航系统的振动特性分析2.1 振动对偏航系统的影响振动是海上风力发电偏航系统中常见的问题,可能导致系统损坏、能效下降、设备寿命缩短等严重后果。
因此,分析偏航系统的振动特性对于优化设计和改进系统性能至关重要。
2.2 振动源与传播路径偏航系统的振动源主要包括风力荷载、机械系统的不平衡、液压泵的振动等。
振动在系统内传播的路径多样,包括结构传导、声波传声和液压传输等。
2.3 振动对偏航系统的影响机理偏航系统的振动对系统的可靠性和稳定性产生复杂影响。
一方面,振动可能导致系统部件的疲劳破坏,如轴承、齿轮等。
另一方面,振动也可能导致系统的动态不稳定,使得偏航系统无法精确跟踪风向,导致发电效率下降。
3. 海上风力发电偏航系统振动特性的优化设计3.1 结构设计优化通过优化偏航系统的结构设计,可以减小振动源并改善传播路径。
例如,增加结构的刚度和强度,避免共振频率,减少机械不平衡等手段。
此外,合理选择和设计材料,如聚合物材料、纤维增强塑料等,也可以有效降低振动。
3.2 参数调节与优化通过调节偏航系统的参数,如液压系统的压力、阀门的开度、系统的摩擦等,可以减小振动幅度。
此外,采用自适应控制方法和智能算法,可以对偏航系统进行动态调整,提高系统对振动的抵抗能力。
风力发电机组的功率控制及载荷分析
风力发电机组的功率控制及载荷分析风力发电机组的功率控制及载荷分析引言:风力发电作为清洁能源的重要组成部分,已经在全球范围内得到了广泛应用。
风力发电机组的功率控制和载荷分析,对于提高风力发电的效率、可靠性和经济性具有重要意义。
本文将对风力发电机组的功率控制方法以及载荷分析进行详细阐述,并探讨其对风力发电产业的影响。
一、风力发电机组的功率控制1.1 无功功率控制无功功率是风力发电机组运行中的重要参数之一。
通过控制电网侧的无功功率,可以提高风力发电机组的功率因数,减少无功功率对电网的影响。
常用的控制方法包括无功功率优化控制和无功功率调频控制。
无功功率优化控制是根据电网的无功功率需求,通过调整风力发电机组的输出功率来实现。
该方法能够提高风力发电机组的功率因数,降低无功功率损耗,同时满足电网对无功功率的要求。
无功功率调频控制是根据风力发电机组的转速、电网频率和负荷需求等参数进行调控。
通过调节风力发电机组的桨叶角度、变桨速度等,控制风力发电机组的功率输出,实现电网对无功功率的要求。
1.2 有功功率控制有功功率控制主要是根据电网的需求,控制风力发电机组的输出功率。
常用的控制方法包括协调控制、最大功率跟踪控制和限功率控制。
协调控制是根据电网的负荷需求和电力系统的稳定性要求,通过调节风力发电机组的转速、桨叶角度和发电机的励磁电流等参数,实现风力发电机组的有功功率控制。
最大功率跟踪控制是指通过调节风力发电机组的桨叶角度,使得风力发电机组的输出功率达到最大值。
该控制方法能够提高风力发电机组的利用率,提高发电效率。
限功率控制是为了保护风力发电机组的安全运行,避免过载等问题。
通过提前设置风力发电机组的最大功率输出值,当风力发电机组的输出功率达到设定值时,控制系统会自动减小风力发电机组的输出功率。
二、风力发电机组的载荷分析2.1 风力负荷分析风力负荷是指风力发电机组在风力作用下承受的载荷,主要包括风载荷和惯性载荷。
风载荷是由于风力的作用而导致的,其大小和方向主要受到风速、风向等因素的影响。
兆瓦级风力发电机组偏航系统主动偏航特性分析

龙源期刊网 兆瓦级风力发电机组偏航系统主动偏航特性分析作者:鄂加强陈燕李振强钱承来源:《湖南大学学报·自然科学版》2014年第01期摘要:针对兆瓦级风力机偏航动作时剧烈振动问题,本文根据兆瓦级风机偏航系统主动偏航原理,在ADAMS中建立了兆瓦级风力发电机偏航系统虚拟样机动力学仿真模型.兆瓦级风力发电机组偏航系统主动偏航振动分析结果表明,偏航系统前四阶扭转振动的固有频率分别为17.694 7 Hz,55.816 6 Hz,85.141 2 Hz,170.182 3 Hz.动力学仿真分析结果表明,主机架在偏航运动的结束阶段存在剧烈的来回振荡现象,且振动的幅值达到了0.15 rad,振动衰减的时间超过了20 s,通过在主机架上加反馈控制可快速消除兆瓦级风机偏航系统来回振荡现象.关键词:风力发电机组;偏航系统;主动偏航;固有频率中图分类号:TK83 文献标识码:A随着世界各国对能源需求的持续增长与日益严格的环境法规,目前兆瓦级风力发电机组已成为风能利用的主流设备.当风速矢量方向发生变化时,风力发电机组的偏航系统能够快速平稳地对准风向,以便风轮获得最大的风能.然而在主动偏航系统启动与刹车过程中,偏航系统的振动对风力发电机组的振动噪声、紧固件的疲劳寿命等方面产生严重的影响.如果其固有频率接近激励频率,系统将产生共振,则风力机在运行过程中,载荷由于结构共振而被放大,这关系到整个风电机组的安全运行.因此有必要对兆瓦级风力发电机偏航系统的振动特性作深入研究,避免共振的发生.然而,目前国内外对风力发电机组振动的研究主要集中在塔筒和桨叶方面,对偏航系统振动研究还比较少[1-3].文献[3]对兆瓦级风力机液压驱动的偏航系统进行了优化设计.文献[4]建立了塔架的扭转振动模型和运动方程,引入了摩擦失稳因子,得到塔架扭转振动失稳的条件.文献[5]从理论上对塔架进行了模态分析,在机舱与塔架耦合条件下求解塔架扭转振动的各阶固有频率与振型.文献[6]对螺栓连接非线性振动特性进行研究,将螺栓连接系统简化为弹簧、阻尼器、质量块的单自由度模型,说明了非线性方程能够较好地描述螺栓连接的振动特性.但如何采取有效措施对兆瓦级风力发电机组偏航系统进行主动偏航动力学分析仍然是主动偏航过程兆瓦级风机偏航系统性能提高的瓶颈.为此,本文针对兆瓦级风力发电机组偏航系统主动偏航过程振动现象,从动力学角度研究偏航系统的动力学机理,并构建合适的兆瓦级风力发电机组偏航系统虚拟样机动力学模型,研究主动偏航过程偏航系统动力学规律.1偏航系统主动偏航动力学模型。
海上风力发电偏航系统的动力学特性分析与建模研究

海上风力发电偏航系统的动力学特性分析与建模研究随着全球能源需求不断增加,寻找替代传统能源的可持续发电方式变得日益重要。
风力发电被视为其中一种最具潜力的可再生能源,特别是海上风力发电因为相对较高的风速和更广阔的可利用面积而备受关注。
然而,海上风力发电系统的稳定性和可靠性依赖于复杂的控制系统,其中之一就是偏航系统。
本文将针对海上风力发电偏航系统的动力学特性展开分析与建模研究,以期为风力发电行业提供有关系统稳定性和控制优化的指导。
1. 动力学特性分析海上风力发电偏航系统的动力学特性受到多种因素的影响,包括风速、海流、风轮动力等。
在分析动力学特性之前,需要对系统结构和相关参数进行详细了解。
1.1 偏航系统结构海上风力发电偏航系统通常由风轮、偏航控制器、偏航驱动系统等组成。
具体而言,风轮通过风动力产生转矩,转矩由偏航控制器感知并控制偏航驱动系统使整个系统保持稳定运行。
1.2 参数分析为了准确描述海上风力发电偏航系统的动力学特性,需要对相关参数进行分析。
这些参数包括风轮特性、转矩传递关系、偏航控制器的响应速度等。
通过分析这些参数,可以进一步理解系统的工作原理和响应特性。
2. 建模研究为了更好地理解海上风力发电偏航系统的动力学特性,建立合适的数学模型是必不可少的。
基于控制工程中的系统动力学理论,可以采用状态空间模型或传递函数模型来描述偏航系统的动态行为。
2.1 状态空间模型状态空间模型利用一组偏微分方程或差分方程来描述系统的状态和输入之间的关系。
通过定义偏航角、转矩和控制信号为系统的状态变量,然后基于风力、海流和其他影响因素建立状态空间方程,可以得到具体的系统动力学模型。
2.2 传递函数模型传递函数模型则是采用拉普拉斯变换将系统的输入和输出之间的关系表示为一个有理函数。
通过分析偏航系统的输入和输出信号之间的传递函数,可以得到系统的阶数和频率响应等信息。
3. 控制优化研究在建立了合适的动力学模型之后,可以应用控制理论和优化方法来分析和优化偏航系统的控制策略。
风力发电机载荷特性
风力机载荷风力机载荷情况风力机载荷是风力机设计和风力机认证时的重要依据,用于对风力机进行静强度和疲劳强度分析。
目前,国际上有很多规范、标准对风力机载荷做了详细的规定。
其中应用最广的是IEC61400-1标准。
1.载荷分类作用在风力机上的载荷主要包括:(1)空气动力载荷;(2)重力载荷;(3)惯性载荷,包括离心力和科氏力等;(4)操纵载荷;(5)其他载荷,如结冰载荷根据载荷的性质,在风力机上的载荷可分为静载荷、定常载荷、周期载荷、瞬态载荷、脉冲载荷、随机载荷和谐振载荷等。
2.载荷情况由不同的外部条件与风力机工作状态组合而成,主要包括:①正常外部条件与风力机正常工作状态组合;②正常外部条件与风力机故障工作状态组合;③极端外部条件与风力机正常工作状态组合。
根据IEC61400-1标准的规定,载荷情况如表5-1所列。
表5—1载荷情况3.安全系数风力机设计时,需要提供的是设计载荷F d ,它和实际载荷F r 的关系是:d f r F r F =, 式中r f ——载荷局部安全系数 见表5-2所示:表5—2 载荷局部安全系数风力载荷计算 风力机载荷特性 1.叶片上的载荷 (1)空气动力载荷作用在叶片上的包括摆振方向的剪力Q yb 和弯矩M xb 、挥舞方向的剪力Q xb 和弯矩M yb以及变桨距时,与变桨距力矩平衡的叶片俯仰力矩M zb 。
叶片上的空气动力载荷可根据2.2节中的动量——叶素理论计算,计算时先求出轴向诱导因子a 和周向诱导因子b ,再求得叶素上的气流速度三角形以及作用在叶素上的法向力dF n 和切向力dF t (前图 2—1),然后通过积分求出作用在叶片上的空气动力载荷Q xb ,Q yb ,M xb 和M yb 。
图2-1叶素上的气流速度三角形和空气动力分量0R2xb 0n r 1Q V cC dr 2ρ=ò0R2yb 0t r 1Q V cC dr 2ρ=òR2yb 0n r 1M V cC rdr 2ρ=òR2yb 0t r 1M V cC rdr 2ρ=ò式中R ——风轮半径; r 0——轮毂半径。
风力发电机组偏航系统关键参数研究

风力发电机组偏航系统关键参数研究摘要:针对大型风力发电机组偏航系统进行了研究,阐述了偏航速度、制动力矩等关键参数的设计方法,并提出了相关建议,对于工程应用具有参考价值。
【关键词】风力发电机偏航系统偏航误差载荷Abstract:The large wind turbine yaw system were studied. It described the design method of some key parameters such as speed and yaw brake torque.. It give some suggestions and provided reference value for engineering application.Keywords:wind turbine;yaw system;yaw error;load1.偏航系统概述自然界中风向是随时变化的,对于水平轴风力发电机组来说,风轮常常不能正对风向,即处于偏航运行状态,此时风轮效率较低,为了保证风机在运行过程中能够最大限度的捕捉风能,使风轮始终处于迎风状态,常常需要偏航系统来帮助风机自动对风。
此外,偏航系统还可以提供必要的锁紧力矩,以保障风力发电机组的安全运行。
根据对风方式的不同,偏航系统一般分为主动偏航系统和被动偏航系统,主动偏航指的是根据控制信号采用电力或液压拖动来带动整个风轮的转动;被动偏航指的是依靠风力通过相关结构完成对风动作,常见的有尾舵、舵轮和下风向自动对风等[1]。
目前大型兆瓦级风电机组多采用主动偏航系统,因此本文着重介绍主动偏航系统。
2.偏航系统关键参数的确定偏航系统的设计在整个机组设计中处于关键地位,因为它会影响主机架的尺寸及塔架顶部法兰的尺寸及螺栓的选择等;偏航系统尺寸的大小取决于机组功率的大小、风轮直径的大小、现场的风资源条件、偏航速度等。
2.1偏航速度为了避免风轮陀螺效应的产生,偏航速度一般不超过15/R,其中R为风轮半径。
211089203_基于SCADA_的风电机组滑动偏航系统可靠性分析

- 8 -高 新 技 术0 引言偏航系统是水平轴式风电机组的重要部件,它能保证风轮始终处于迎风状态,提高发电效率,还能连接机架和塔架,保障风电机组安全运行[1]。
偏航系统分为滚动偏航系统和滑动偏航系统,滚动偏航系统结构复杂,维护成本较高;滑动偏航系统采用滑动的方式,无偏航轴承,结构简单,成本低且维护方便。
为了降低风电机组的成本,滑动偏航系统逐渐成为风电机组的标准配置,因此,对滑动偏航系统的运行性能和可靠性进行分析是非常必要的。
国内外专家对偏航系统的可靠性问题做了大量的研究。
赵洪莉等[2]利用风向和风机偏航角度之间的差值对风机偏航系统进行故障诊断,结果表明,该方法能准确地识别风机故障。
该文通过自研数据采集系统采集偏航系统运行性能参数,例如偏航电机的扭矩、电流以及转速等数据,验证它们与理论设计值的偏差,并联合SCADA 记录的机组风速、功率和环境温度等参数分析滑动偏航系统的可靠性变化趋势,为风电机组滑动偏航系统设计优化提供数据支持,具有实际工程意义。
1 滑动偏航系统原理滑动偏航系统主要由偏航控制系统、偏航电机、偏航制动器、偏航减速器以及偏航齿轮组成。
目前,国内部分机组仍采用滚动偏航系统[3],在结构上使用滚动轴承,因此存在结构复杂、承载力小以及维护成本高等缺点。
与滚动偏航系统相比,滑动偏航系统具有制造简单、成本低、对机舱的承载能力强且不需要润滑油泵等优点。
2 滑动偏航数据采集系统风电机组滑动偏航数据采集系统是基于功能需求和自主设计开发的,主要监测偏航电机输出扭矩、转速、电流以及制动器的预紧力[4]。
该项目自主开发了滑动偏航数据采集系统,包括传感器接入模块、数据采集模块、远程数据共享模块、散热模块和恒源供电模块,如图1所示。
该系统能对前端各种传感器信号进行采集,并实现滑动偏航系统性能参数和机组参数的远程传输和共享,达到了数据实时分析和监测的目的。
3 偏航性能参数验证针对某风场5.0MW 机组滑动偏航系统现场实测的各类传感器数据进行统计和分析,验证滑动偏航系统的运行性能参数与理论设计值的偏差。
考虑海流影响的海上风力发电偏航系统性能分析

考虑海流影响的海上风力发电偏航系统性能分析海上风力发电是目前可持续能源中最为成熟且广泛应用的技术之一。
然而,海洋环境的复杂性以及海流对风力发电机偏航系统的影响是制约其性能的重要因素之一。
因此,对于海流影响下的海上风力发电偏航系统性能进行深入分析至关重要。
本文将探讨海流对风力发电机偏航系统性能的影响,并对其进行详细分析和评估。
首先,海流对海上风力发电偏航系统的影响主要体现在两个方面:一是对偏航系统的稳定性产生影响,二是对偏航系统的控制策略提出挑战。
海流对偏航系统的稳定性具有明显的影响。
海流的存在会对风力发电机的结构产生作用力,导致风力发电机与海流方向不一致,进而导致偏航现象的发生。
偏航现象会导致风力发电机的偏离预定方向,降低风能的利用效率。
因此,需要通过偏航系统对海流产生的力进行准确的估计,并采取相应的控制措施来保持风力发电机的稳定运行。
相关研究表明,合理设计偏航系统的结构和参数,以及采用合适的控制算法都能有效地抑制偏航现象。
因此,在海流影响下,对偏航系统的稳定性进行分析和改进是优化海上风力发电系统性能的一项重要任务。
其次,海流对偏航系统的控制策略提出了挑战。
在没有海流存在的情况下,传统的控制方法通过风速和风向来实现偏航系统的调节。
但是,海流的存在使得风力发电机需要同时考虑风速、风向和海流等因素。
这导致了对控制算法的设计和优化提出了更高的要求。
当前,研究人员通过建立复杂的气动动力学和液动动力学模型,结合优化算法来改进偏航系统的控制效果。
然而,由于海流的不确定性以及风力发电机与海流的相互作用复杂性,目前在这方面研究还存在一定的挑战。
因此,需要进一步深入分析和研究海流对偏航系统的控制策略的影响,以提高风力发电机在海流环境下的控制性能。
为了准确评估海流影响下海上风力发电偏航系统性能,需要采用合适的评估指标。
常用的性能评估指标包括偏航误差、偏航时间和能量损失。
偏航误差是衡量偏航系统控制效果的关键指标,它反映了风力发电机是否偏离预定方向,并直接影响着风能的利用效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风力发电机滑动偏航系统载荷特性分析丛智慧;安利强;翟永杰;张家旗【摘要】偏航控制过程中,滑动式偏航系统载荷特性是影响风力发电偏航系统安全可靠性的关键因素,现以2 MW风力发电机为研究对象,采用 IEC标准中 Von Kamman谱模拟湍流风,考虑重力载荷、气动载荷及惯性载荷的影响,建立风力发电机组模型,基于 Bladed 软件仿真风力发电机偏航时机组的动态特性,研究偏航时风况、偏航速度及偏航角度对滑动式偏航系统荷载的影响规律,为风力发电机的运行维护及改进设计提供依据。
研究结果表明,偏航过程中同时变桨,变桨速率对偏航轴承的荷载有重要影响。
湍流强度影响偏航轴承的疲劳和极端载荷的波动情况,偏航速度越大,偏航轴承处极限荷载越大。
%In process of yaw control,load characteristic of gliding yaw system is a key factor affecting security and reliability of yaw system of wind power generation. Taking 2 MW wind power generator as a research object,using Von Kamman spectrum in IEC standard to simulate turbulence wind and considering affects of gravitational load,aerodynamic load and in-ertial load,a wind turbine generator model was established. Based on dynamic characteristic of the generator when using Bladed software simulating yaw of the wind power generator,affecting principles of wind regime,yaw velocity and yaw an-gle on load of gliding yaw system were studied which might provide references for running maintenance and improvement de-sign on the wind power generator. Research results indicates that variable pitch rate in process of yaw have an important af-fect on load of yaw bearing and turbulence intensity may affect fatigue of yaw bearing and fluctuation ofextreme load. In addition,extreme load of yaw bearing might be bigger when the yaw velocity is faster.【期刊名称】《广东电力》【年(卷),期】2015(000)002【总页数】5页(P25-29)【关键词】风力发电机;滑动式偏航系统;偏航轴承;载荷特性【作者】丛智慧;安利强;翟永杰;张家旗【作者单位】大唐赤峰新能源有限公司,内蒙古赤峰 024000;华北电力大学,河北保定 071003;华北电力大学,河北保定 071003;华北电力大学,河北保定071003【正文语种】中文【中图分类】TK83偏航系统是风力发电机(以下简称“风机”)完成对风控制的核心部件,同时也是水平轴风机的重要承载部件。
滑动式偏航系统由于承载力大,而且省去了滚动轴承式偏航系统的刹车和液压装置,并在大型风机开始采用,如Vestas 2 MW机组就采用了滑动式偏航系统。
但是滑动轴承由于采用工程塑料产生自润滑效应,因此容易造成偏航齿圈与滑动块磨损,甚至由于滑动阻尼过大,造成偏航电机故障或者偏航减速机齿轮发生断齿现象。
近几年,国内外学者对风机偏航做了一定的研究,包括偏航气动性计算、偏航算法研究、偏航硬件设计、偏航系统结构动力学分析等。
董江东[1]采用有限元数值仿真方法对多工况下偏航驱动减速机中的传动部分进行齿面接触静力学分析及齿面接触动力学分析,结果表明摩擦系数增大后,在长时间反复作用下,会造成齿轮工作时振动增加、磨损加剧等现象,最后导致齿轮疲劳失效。
余意[2]和周飞[3]采用有限元模型,分别对滑动轴承偏航齿圈的外齿和滚动轴承的外圈齿轮和滚动体进行静动特性分析。
文献[4-5]采用数值方法对偏航驱动减速机的行星齿轮进行了动力学分析、疲劳分析以及箱体的模态分析,然后模拟了运转过程中齿轮接触力的变化。
牛蔺楷[6]采用三种偏航轴承外载荷状况对其接触载荷分布进行计算,采用ABAQUS建立模型,结合线弹性接触力学对结果从应力和塑性应变两个方面进行讨论。
王秀文[7]等用SIMPACK软件建立了偏航系统及整机动力学模型,仿真IEC规定中的阵风和湍流风两种工况,将两种工况的风向与偏航角度进行对比,研究偏航时桨距角变化,在时域上对比了两种工况下偏航运动对风机载荷的影响,在频域上分析偏航工况下的坎贝尔图以及对应的能量分布图,判定偏航过程中的潜在共振点是否为危险共振点。
贾平[8]采用力学模型与经验公式两种方法计算偏航、变桨滚动轴承的最大接触载荷,并进行对比分析,验证偏航、变桨轴承力学模型求解载荷分布方法的正确性。
本文研究的2 MW风机为三叶片,上风向风机,风轮直径80 m,风机额定风速12 m/s,额定转速18 r/min,功率控制方式采用变速变桨距。
1.1 叶片及塔筒模型2 MW风机采用LM38.75叶片,建模时将叶片沿展向从叶根到叶尖划分为10个叶素。
塔筒高度60 m,底部直径4.02 m,厚度0.018 m,顶部直径2.31 m,厚度0.011 m。
1.2 控制系统模型2 MW风机采用变速变桨功率控制方式,由发电机转矩控制器与统一变桨距控制器组成。
风机在额定功率恒定区运行时,发电机转矩控制方式实现发电机转速升高、转矩降低的控制。
统一变桨距控制方式,目的是调节发电机转速,采用桨距角比例-积分-微分(prepertion-integration-differentiation,PID)控制器实现发电机转速控制,PID控制器如式(1),即式中:Δθ为桨距角与最优桨距角的差值;KP为比例增益,KI为积分增益,KD为微分增益;N为传动比;ΔΩ为风轮当前转速与额定转速的差值。
1.3 偏航系统模型2 MW风机的偏航系统为滑动式偏航系统,由偏航控制系统、偏航机构、扭缆保护装置三部分组成,其中偏航机构由偏航电机、偏航减速箱、偏航齿圈、偏航爪组成。
偏航机构中偏航大齿圈固定在塔筒上,偏航减速箱固定安装在机舱底座上。
滑动式偏航机构如图1所示。
风向标作为感应元件,将风向变化信号转换为电信号传递到偏航发电机控制回路的处理器中,处理器经过比较后给偏航发电机发出顺时针或逆时针的偏航指令。
为了减少偏航时的陀螺力矩,发电机转速将通过同轴连接的减速箱减速后,将偏航力矩作用在回转体大齿轮上,带动风轮偏航对风,当对风结束后,风向标失去电信号,偏航发电机停止转动,偏航过程结束。
偏航流程如图2所示。
偏航过程中,偏航机构一般保持恒定的偏航速度,机舱与偏航爪通过螺栓连接,偏航爪与偏航齿圈形成滑动摩擦。
式中:a=1.33;L为湍流尺度;Ω为空间频率;σ为湍流强度。
由此可推得大气湍流Von Kamman模型的纵向和横向相关函数:风机载荷工况中一般要考虑稳定风速及湍流风。
在湍流情况下,偏航机构荷载更为复杂,本文考虑了风的湍流特性。
IEC标准[9]中规定了两种湍流风速谱模型:Kaimal模型与Von Kamman模型,本文选用Von Kamman谱作为湍流风模型,其能量频谱函数[10]式中:为Gamma函数;K为Bessel函数。
风机的年最大平均风速为22 m/s,切出风速为25 m/s。
根据风力发电偏航控制系统的设置,22 m/s风速对应的最大偏航角度为35°。
本文结合不同风况条件及不同的偏航速度、偏航角度研究偏航轴承载荷特点,共计算4种工况,参数见表1。
正常湍流模型湍流标准差式中:Iref为风速为15 m/s时湍流强度平方的预期值;νav为轮毂处的平均风速;νb=5.6m/s。
这样,湍流强度风速模型选用普通阵风模型和Von Kamman湍流风速模型,轮毂高度61.5 m,仿真时间为160 s,两种风速在轮毂高度处的时域图如图3所示。
4.1 阵风下偏航的特性本文采用Bladed软件,仿真风机正常发电时的偏航过程。
初始风向0°,与风轮平面垂直,15 s时风向开始发生变化,经过10 s的时间,风向从0°变化为35°,此时,风机启动偏航,机舱以0.4 rad/s的偏航速度进行对风运动,经87.5 s后完成对风,风力机停止偏航。
仿真过程中,风向、偏航角及桨距角的变化如图4所示。
在风机偏航过程中,风轮上的荷载及机舱重力荷载传递至偏航机构,通过偏航齿圈传递至塔筒。
将偏航机构上承受的荷载简化至大齿圈中心坐标系,如图5所示。
图6为仿真过程中偏航轴承所受载荷的时域结构,其中Mx、My为绕x和y轴的倾覆力矩,此力矩会改变偏航机构偏航爪与偏航齿圈的正压力,从而改变偏航爪上下表面的摩擦力,Mz为偏航力矩。
Fx、Fy为沿x和y轴方向的力,此力会改变偏航爪与大齿圈侧面的摩擦力。
Fz为沿偏航坐标系z方向的力,增加了偏航爪与偏航齿圈上表面的摩擦力。
由图4可以看出,在15 s时风向开始变化,为了保持最大发电功率,桨距角随之减小,结合图6,偏航轴承x方向的力和力矩均有轻微的上升,但不是很明显,y方向与z方向力的变化也没有较大波动,说明偏航过程对偏航轴承力分量的影响较小。
y方向与z方向的力矩变化比较明显,y方向力矩在25 s达到最大值,z方向上的力矩减小继而反向增大,在25 s达到顶点。
由于风向变化速率比桨距角变化速率要大,功率在风向变化过程中产生了短时间内的下降,功率图如图7所示。
从图7可知道,25 s时风机开始偏航后,风向与机舱夹角逐渐缩小,桨距角增大,功率逐渐恢复平稳,y方向上的力矩的波动幅度及大小逐渐减小,在112.5 s时偏航动作结束,偏航载荷均恢复到偏航开始之前的稳定状态。
由此可以看出,由于在偏航过程中同时进行变桨,变桨速率是影响偏航轴承载荷的一个重要因素。
4.2 偏航速度及角度对偏航轴承载荷的影响图8为工况1与工况3的偏航轴承载荷,由于偏航速度不同,各方向的力矩在达到平稳状态的时间不同,偏航速度越快,达到平稳状态所需的时间越短,主要对y 方向与z方向的力矩影响较大,对x方向力矩及各方向上的力影响较小。