PLC的运输带控制系统
基于PLC的传送带控制系统设计
基于PLC的传送带控制系统设计概述传送带是工业生产中常见的运输设备,用于将物料从一个地方转移到另一个地方。
为了实现传送带的安全高效运行,需要设计一个可靠的控制系统。
本文将介绍基于PLC(可编程逻辑控制器)的传送带控制系统设计,包括硬件选型、软件设计和控制逻辑。
硬件设计PLC选型选择适合的PLC对于控制系统的设计至关重要。
在选择PLC时,需要考虑以下因素:•输入输出点数:根据传送带的需要确定所需的输入输出点数,包括传感器、执行元件等。
•处理能力:PLC的处理能力需要满足传送带控制的要求,包括响应速度、运算能力等。
•扩展性:如果未来有扩展需求,需要选择具有扩展接口的PLC。
传感器和执行元件为了实现对传送带的有效控制,需要选择适合的传感器和执行元件:•光电传感器:用于检测物料的到达和离开,可以通过监测物料的光电信号来确定物料的位置和运行状态。
•编码器:用于监测传送带的位置和速度,可以实时反馈传送带的状态。
•电动机:用于驱动传送带的运行,可以根据控制信号调整传送带的速度和方向。
软件设计编程语言选择PLC通常支持多种编程语言,包括Ladder Diagram(梯形图)、Structured Text(结构化文本)等。
根据实际需要选择合适的编程语言,以实现控制逻辑。
控制逻辑设计传送带的控制逻辑包括以下几个方面:•启动和停止控制:根据输入信号判断传送带是否需要启动或停止,同时控制电动机的开启和关闭。
•速度和方向控制:根据设置的速度和方向信号,调整电动机的转速和传送带的运行方向。
•故障检测和保护:监测传感器和执行元件的状态,及时发现故障并采取保护措施,例如停止传送带或报警。
控制系统实现硬件连接根据PLC和传感器、执行元件的接口要求,进行硬件连接。
确保输入信号和输出信号正确连接到PLC的相应接口。
软件编程根据控制逻辑设计,使用选择的编程语言编写PLC程序。
在编程过程中,需要充分考虑系统的实时性和稳定性,确保程序的可靠性。
基于plc的皮带运输机控制系统设计毕业设计

基于plc的皮带运输机控制系统设计毕业设计近年来,工业自动化技术在各行业中广泛应用,其中皮带运输机控制系统也越来越受到注重。
本文将针对这一问题进行探讨,重点介绍基于PLC的皮带运输机控制系统设计方案。
一、系统设计基础皮带运输机是一种广泛应用于工厂、码头、矿山等场所的物料输送设备。
其工作原理是将被输送的物品放到皮带上,通过电机带动皮带转动,实现物品的运输。
控制皮带运输机的核心是设计一个控制系统,使得皮带运输机能够高效、稳定地工作。
二、设计要素1. 控制器的选型PLC是工控系统中较为常见的一种控制器,其优点是稳定性高、易于编程、可扩展性强。
在控制系统中,PLC选型要考虑运输机的规模、负荷、环境等因素,使其能够满足对控制精度、反应速度和实时性等方面的要求。
2. 控制系统的组成控制系统主要由传感器、执行器、中央处理器(CPU)、输入/输出模块(I/O模块)等组成。
传感器负责检测物品的位置、速度、重量等信息,执行器则完成控制信号的输出。
CPU负责控制整个系统的运行,进行指令的处理和数据的传输,I/O模块则连接所有设备,进行信号的输入和输出。
3. 控制系统的程序设计在设计控制系统的程序时,应根据实际情况编写适当的控制程序,例如确定启动、停止、加速、减速的条件和时机;设计皮带运输的速率、位置控制程序;编写报警程序,实现故障检测和报警。
4. 系统的安全设计在皮带运输机的控制系统中,安全设计是至关重要的一个环节。
如在触及限位开关的情况下,皮带运输机应该立即停止,以保证设备不会出现安全隐患。
三、总结基于PLC的皮带运输机控制系统设计,是一个多方面的工程,需要综合考虑机械、电气、控制等多个方面的因素。
在设计过程中,应该注重各项技术设计方案的协调与整合,以实现控制系统的完美运转。
(完整word版)PLC皮带运输机控制系统课程设计
目录第1章控制对象概述 (1)1。
1 皮带运输机用途、基本组成结构及工作过程 (1)1.1。
1 皮带运输机用途 (1)1。
1.2 皮带运输机组成及工作原理 (1)1。
2 控制对象对控制系统的要求 (1)1.3 本课题应完成的设计工作 (2)第2章控制方案论证 (3)2.1 继电器控制方案 (3)2.2 单片机控制方案 (3)2。
3 PLC控制方案 (4)2.4 结论 (4)第3章控制系统硬件设计 (5)3。
1 电机及元件选择 (5)3.2 电路设计 (5)3。
2.1 主电路设计 (5)3.2。
2 PLC I/O 接线图设计 (6)第4章控制系统程序设计 (7)4.1 程序组成部分 (7)4.2 主程序 (7)4.3 公用子程序 (8)4.4 手动公用子程序 (8)4。
5 自动公用子程序 (9)4.6 M1电机故障子程序 (10)4。
7 M2电机故障子程序 (11)4。
8 M3电机故障子程序 (12)4。
9 M4电机故障子程序 (12)第5章程序调试 (13)第6章体会心得 (14)附录 (15)参考资料 (18)第1章控制对象概述1。
1 皮带运输机用途、基本组成结构及工作过程1。
1.1 皮带运输机用途皮带输送机可以广泛应用于现代化的各种工业企业中,露天采矿场及选矿厂中,在矿山的井下巷道、矿井地面运输系统中,皮带输送机都得到了广泛应用,水平运输或倾斜运输,皮带输送机的使用都非常方便。
皮带输送机是以连续摩擦驱动的方式用来运输物料。
那么皮带输送机的主要是由输送带和驱动装置组成的。
皮带输送机具有输送量大、结构简单优点,它广泛地应用在矿山、冶金、煤炭等部门,用来输送松散物料或成件物品,根据输送工艺要求,可以单台输送,也可多台组成或与其他输送设备组成水平或倾斜的输送系统,以满足不同布置型式的作业线需要。
皮带运输机的驱动装置由单个或多个驱动滚筒驱动,驱动电机也可以是单个电机或多个电机驱动。
一般驱动装置包括电动机、减速机、液力偶合器、制动器或逆止器等组成。
皮带运输机的PLC控制系统
课程设计项目成绩评定表设计项目成绩评定表课程设计报告书目录目录一、设计目的 (3)二、设计思路 (3)三、设计过程 (3)3.1PLC 输入/ 输出端子接线图 (3)3.2 程序设计 (5)3.3皮带传输机控制原理 (6)四、系统调试与结果 (7)4.1 系统调试 (7)4.2 调试结果 (7)五、主要元器件与设备 (9)六、课程设计体会与建议 (9)七、参考文献 (10)附录 (11)一、设计目的1.熟悉步进顺控指令的编程方法;2.掌握选择性流程程序的编制;3.掌握皮带运输机的程序设计及其外部接线。
二、设计思路1、设计急停电路。
2、设计可选择的启动电路。
3、进行电路整合。
4、各个分路进行仿真调试。
三、设计过程3.1PLC 输入/ 输出端子接线图图1皮带运输机的动作示意图在建材、化工、机械、冶金、矿山等工业生产中广泛使用皮带运输系统运送原料或物品。
供料由电阀DT控制,电动机M1、M2、M3、M4分别用于驱动皮带运输线PD1、PD2、PD3、PD4。
储料仓设有空仓和满仓信号,其动作示意简图如图1所示。
根据皮带运输机的控制要求,其系统PLC 输入/ 输出端子接线图如图2 所示,(PLC 的输出负载都用指示灯代替)。
图2 中:SA0 ———自动/手动按钮 SB1 ———自动启动按钮 SB2 ———正常停止按钮 SB3 ———急停按钮SB4 ———点动DT 电磁阀按钮SB5~SB8 ———M1~M4的点动启动按钮 SQ1———满仓信号按钮 SQ2———空仓信号按钮 SB9 ———故障启动按钮KA1———控制DT 的起动和停止HL1~HL4———M1~M4接通指示灯KM1~KM4 ———交流接触器, 分别控制M1~M4 的起动和停止。
图2 皮带运输机的PLC 控制系 统外部接线图自动/手动转换自动起动正常停止急停点动DT电磁阀点动M1点动M2点动M3点动M4满仓信号空仓信号故障起动3.2 程序设计根据控制设计要求, 本文编制的状态转移程序如图3 所示(程序指令表及梯形图见附录):图3 皮带运输机的状态转移示意图3.3皮带传输机控制原理(1) 起动控制: 接通PLC 的电源, 在初始化脉冲M8000 作用下进入初始状态S0 , 按下SB1/SQ2 → 接通X1/X12 →进入状态S20 →启动定时器T0 , 置位Y1 →接通KM1 →起动M1 →5s 后T0 动作→进入状态S21 →起动定时器T1 , 置位Y0 →接通KA1 →起动DT →5s 后T1 动作→进入状态S22 →启动定时器T2 , 置位Y2 →接通KM2 →起动M2 →5s 后T2 动作→进入状态S23 →置位Y3 →接通KM3 →起动M3 →5s 后T3 动作→进入状态S24 →置位Y4 →接通KM4 →起动M4 。
基于PLC的传送带控制系统设计

基于PLC的传送带控制系统设计第一章:引言1.1 研究背景随着工业自动化的发展,传送带在各个行业中被广泛应用。
传送带控制系统是其中重要的组成部分,它通过精确的控制实现物品的运输和分拣,提高生产效率和质量。
PLC(可编程逻辑控制器)作为一种可编程电子系统,具备高性能和可靠性,逐渐成为控制传送带系统的首选。
1.2 研究目的和意义本文旨在设计一种基于PLC的传送带控制系统,通过对传送带的运行状态进行监测和控制,实现物品的准确分拣和运输。
这对于提高传送带系统的工作效率和减少人力成本具有重要意义。
同时,本文的研究成果可以为其他控制系统的设计和优化提供参考。
第二章:传送带的工作原理和要求2.1 传送带的工作原理传送带由电动机、驱动轮、输送带和支撑构架等部分组成。
电动机通过驱动轮带动输送带运行,物品通过传送带在不同工位之间进行传送。
传送带控制系统需要根据实际需求,对传送带的运行速度、方向和起停等进行准确控制。
2.2 传送带控制系统的要求传送带控制系统首先需要具备良好的稳定性和可靠性,能够长时间稳定运行。
其次,系统需要具备高度的灵活性和扩展性,能够适应不同工况和物品的运输需求。
还需要实现对传送带的自动监测和报警功能,及时发现和修复故障。
第三章:基于PLC的传送带控制系统设计3.1 系统结构设计基于PLC的传送带控制系统由PLC主控单元、输入输出模块、传感器和执行器组成。
PLC主控单元负责控制传送带的运行状态,输入输出模块用于与外界进行信号交互,传感器用于监测传送带的运行情况,执行器用于控制传送带的运行。
3.2 PLC程序设计PLC程序设计是传送带控制系统设计的核心。
根据控制需求,设计PLC程序实现传送带的控制逻辑。
程序需要根据传感器的信号进行判断,控制执行器的动作,精确控制传送带的运行速度、方向和起停等功能。
3.3 传感器选择和布置传感器是实现对传送带运行状态监测的重要组成部分。
本文选择xx型传感器,该传感器具有良好的稳定性和高度的灵敏度。
传送带PLC控制系统设计

传送带PLC控制系统设计一、本文概述Overview of this article随着工业自动化水平的不断提升,传送带作为物流和生产流程中的关键环节,其控制系统设计变得愈发重要。
本文将深入探讨《传送带PLC控制系统设计》的相关内容,旨在为读者提供一套全面、高效的传送带控制系统设计方案。
文章将首先介绍传送带PLC控制系统的基本概念、发展历程以及其在工业自动化领域的应用价值。
随后,文章将详细阐述PLC控制系统的硬件组成、软件编程以及系统调试等关键环节,并结合实际案例进行分析。
文章还将探讨传送带PLC控制系统设计中的常见问题及解决方案,为读者在实际应用中提供有益参考。
通过本文的阅读,读者将能够深入了解传送带PLC控制系统的设计原理和实践方法,为工业自动化领域的发展贡献力量。
With the continuous improvement of industrial automation level, the control system design of conveyor belts, as a key link in logistics and production processes, has become increasingly important. This article will delve into the relevant content of "Design of PLC Control System for ConveyorBelt", aiming to provide readers with a comprehensive and efficient design scheme for conveyor belt control system. The article will first introduce the basic concept, development history, and application value of PLC control system for conveyor belts in the field of industrial automation. Subsequently, the article will elaborate in detail on the hardware composition, software programming, and system debugging of the PLC control system, and analyze them in conjunction with practical cases. The article will also explore common problems and solutions in the design of PLC control systems for conveyor belts, providing useful references for readers in practical applications. Through reading this article, readers will be able to gain a deeper understanding of the design principles and practical methods of PLC control systems for conveyor belts, contributing to the development of industrial automation.二、传送带基础知识Fundamentals of conveyor belts传送带作为工业生产和物流运输中的关键设备,广泛应用于各个行业。
文献综述_基于PLC的皮带运输的控制系统设计
《基于PLC的矿用皮带运输的控制系统》文献综述容摘要皮带运输机是一种有牵引件的连续运输设备,广泛应用于矿产开采、金属冶炼、化工、铸造等行业的生产线和输送线以及港口的生产部门。
主要用来运送物料,根据输送工艺的要求,可以单台输送,也可以多台组合输送,或者和其它输送设备组成水平或倾斜的输送系统。
煤矿的输送系统对保证矿井正常生产起着极其重要的作用。
本设计主要叙述了利用先进的PLC技术对煤矿企业皮带机系统进行技术改造方案,并且叙述了皮带机的基本原理、皮带机集中控制系统设计步骤。
PLC是一种专门在工业环境下应用而设计的数字运算操作的电子设备。
它采用可编程存储器,用来在其部存储执行逻辑运算、顺序运算、计时、计数和算数运算等操作的指令,并能在其部存储进行数字或模拟式的输入和输出,控制各种类型的机械或生产过程。
关键词:煤矿;皮带运输机;集中控制系统;PLC国外皮带运输机的研究现状国外在皮带运输机动态分析研究方面发展的比较早,动态分析理论与研制的软件已经基本能够满足当前的发展需求;而我国则比较晚,跟国外相比,还存在比较大的差距,尤其是动态分析的软件部分。
为了尽快弥补差距,赶超世界先进水平,有必要研究跟分析当今国外皮带运输机的动态分析软件。
目前,美国、法国意大利等发达国家在动态分析研究方面,已经达到了国际领先地位。
我国生产制造的上运式带式输送机的种类较多。
在“八五”时期,通过国家一条龙“日产万吨综采设备”项目实施,皮带运输机的技术水平有了很大的提高,煤矿井下用大功率、长距离带式输送机的关键技术研究和新产品开发都取得了很大的进步。
如大倾角、长距离带式输送机成套设备、高产高效工作面顺槽可伸缩带式输送机等都填补了国空白,并对带式输送机的主要元部件进行了理论研究跟产品的开发,研制成功了多种软启动和制动装置以及以PLC为核心的可编程电控装置,驱动系统采用可调速型液力耦合器和行星齿轮减速器。
皮带运输机的集中控制系统的发展及存在问题在煤矿中,煤流的输送大部分在几百米到十几公里之间,因此它的运输系统要有多台皮带输送机、给煤机、煤仓等组成,协调配合完成长距离运输任务。
PLC运输带系统控制流程
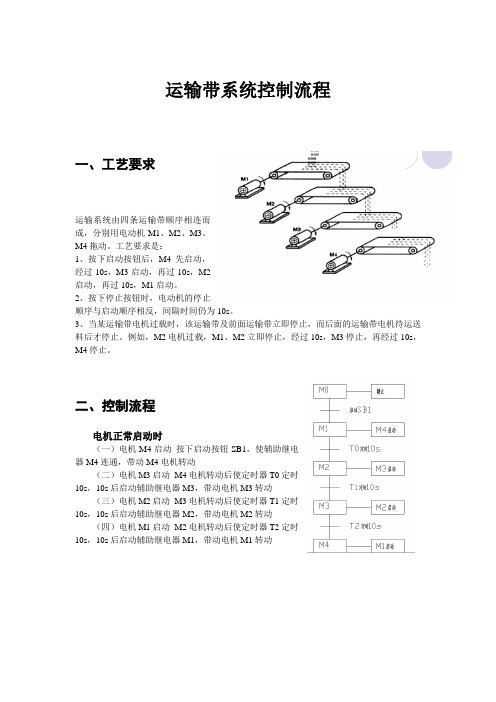
运输带系统控制流程一、工艺要求运输系统由四条运输带顺序相连而成,分别用电动机M1、M2、M3、M4拖动。
工艺要求是:1、按下启动按钮后,M4先启动,经过10s,M3启动,再过10s,M2启动,再过10s,M1启动。
2、按下停止按钮时,电动机的停止顺序与启动顺序相反,间隔时间仍为10s。
3、当某运输带电机过载时,该运输带及前面运输带立即停止,而后面的运输带电机待运送料后才停止。
例如,M2电机过载,M1、M2立即停止,经过10s,M3停止,再经过10s,M4停止。
二、控制流程电机正常启动时(一)电机M4启动按下启动按钮SB1,使辅助继电器M4连通,带动M4电机转动(二)电机M3启动M4电机转动后使定时器T0定时10s,10s后启动辅助继电器M3,带动电机M3转动(三)电机M2启动M3电机转动后使定时器T1定时10s,10s后启动辅助继电器M2,带动电机M2转动(四)电机M1启动M2电机转动后使定时器T2定时10s,10s后启动辅助继电器M1,带动电机M1转动电机正常停止时(一)电机M1停止按下SB2按钮,使得辅助继电器M1停止,电机M1停止(二)电机M2停止电机M1停止后,定时器T2开始定时10s,10s后电机M2停止(三)电机M3停止电机M2停止后,定时器T1开始定时10s,10s后电机M3停止(四)电机M4停止电机M3停止后,定时器T0开始定时10s,10s后电机M4停止当电机M1过载时(一)电机M1停止电机M1过载时,FR1触点触发,M1电机立刻停止。
(二) 电机M2停止电机M1停止后,定时器T3开始定时10s,10s后M2停止(三) 电机M3停止电机M2停止后,定时器T4开始定时10s,10s后M3停止(四) 电机M4停止电机M3停止后,定时器T5开始定时10s,10s后M4停止.当电机M2过载时(一)电机M1,M2同时停止电机M2过载时,FR2触点触发,M1,M2电机立刻停止(二)电机M3停止电机M2停止后,定时器T4开始定时10s,10s后M3停止(三)电机M4停止电机M3停止后,定时器T5开始定时10s,10s后M4停止当电机M3过载时(一)电机M1,M2,M3同时停止电机M3过载时,FR3触点触发,M1,M2,M3立刻停止(二)电机M4停止电机M3停止后,定时器T5开始定时10s,10s后M4停止当电机M4过载时电机M1,M2,M3,M4同时停止电机M4过载时,FR4触点触发,M1,M2,M3,M4立即停止三、PLC选型PLC控制系统输入信号6个,输出信号4个。
基于PLC的主运输皮带智能控制系统的研究与应用

基于PLC的主运输皮带智能控制系统的研究与应用摘要:皮带运输机是现代化煤矿高产高效的主要运输设备。
结合井下皮带机运输系统的具体情况和要求,研制开发了一套S7-200 PLC结合变频器的井下皮带运输机智能控制系统。
此系统根据负载的大小来实时控制拖动电动机加速或减速,使皮带机处于最佳运行状态。
此系统适用于煤量随时间变化较频繁的系统,可大大节约电能,降低皮带运输系统的设备损耗,延长设备的使用寿命。
关键词:皮带运输;PLC 变频;智能控制采用西门子S7-200PLC的智能控制理论在煤矿主运输皮带系统中的应用是比较成功的,实现了非线性控制的任务,避免了煤矿主运输皮带系统由于皮带机械不稳定及输煤不均匀引起的故障,使煤矿主运输皮带系统能够实现运行稳定、可靠,适应性强,易于调试、维护的功能,为今后的进一步研究打下了基础。
一、主运输皮带智能控制系统的设计1、主运输皮带是现代化煤矿安全高效生产的主要运输设备,其运行情况的稳定与否直接关系到煤矿的生产状况。
本智能控制系统参数设置准确、方便,人机界面友好,便于现场维护和使用。
当出现打滑、跑偏、皮带纵向撕裂、超速、低速、超温、烟雾降等故障时,该系统可根据故障类型进行相应的保护动作,对故障进行记忆和显示,同时发出语言故障报警信号,对集控的多台保护装置进行通讯,便于维护人员进行及时处理。
主运输皮带智能控制系统由检测装置、通信装置、控制装置、执行装置等组成。
其中控制装置由PLC、A/D、D/A及以太网转换模块等组成。
煤矿井下主运输皮带多为双滚筒驱动或多滚筒驱动,每个驱动滚筒由单一的一台电动机拖动。
控制装置可实现功率平衡、启动信号给定、速度控制、数据采集、与其他控制器通信等功能。
2、PLC是整个主运输皮带智能控制系统的核心,它采集系统所有输入信号,包含起停控制信号及系统自动反馈的控制信号,如报警,负载,温度等,并实现对所有动作器件如中间继电器、接触器线圈,变频器的控制,同时完成和上位机的数据通讯。
基于plc的皮带运输控制系统毕业设计
基于plc的皮带运输控制系统毕业设计一、选题背景皮带运输控制系统是工业自动化中常用的一种控制系统,它可以实现对物料在生产过程中的运输和流程的自动化控制。
随着工业自动化技术的不断发展,越来越多的企业开始采用皮带运输控制系统来提高生产效率和产品质量。
本文将介绍基于PLC的皮带运输控制系统设计方案,包括系统架构、硬件设计、软件设计等内容。
二、系统架构皮带运输控制系统主要由以下几个部分组成:1. 传感器模块:包括温度传感器、压力传感器等,用于检测物料在运输过程中的各种参数。
2. PLC控制模块:负责接收传感器模块采集到的数据,并根据预设的逻辑进行处理和判断,从而实现对皮带运输过程中各个环节的自动化控制。
3. 人机界面模块:提供给操作员一个直观、友好的界面,用于监视和调整整个系统的工作状态。
4. 通信模块:负责与其他设备进行通信,如与上位机通信以实现远程监测和控制。
三、硬件设计1. 传感器模块:根据需要选择不同类型的传感器,如温度传感器、压力传感器等,并将它们连接到PLC的输入口。
2. PLC控制模块:选择适合系统需求的PLC型号,并根据系统架构设计PLC程序,实现对皮带运输过程中各个环节的自动化控制。
3. 人机界面模块:选择适合系统需求的触摸屏或显示屏,并通过编程实现与PLC之间的通信,以实现对整个系统的监视和调整。
4. 通信模块:选择适合系统需求的通信设备,如RS232、RS485等,并通过编程实现与上位机之间的通信,以实现远程监测和控制。
四、软件设计1. PLC程序设计:根据系统架构设计PLC程序,实现对皮带运输过程中各个环节的自动化控制。
具体包括传感器数据采集、数据处理和判断、输出控制信号等功能。
2. 人机界面程序设计:通过编程实现与PLC之间的通信,以实现对整个系统的监视和调整。
具体包括显示当前工作状态、设定参数等功能。
3. 上位机程序设计:通过编程实现与通信模块之间的通信,以实现远程监测和控制。
皮带运输机PLC控制系统设计
皮带运输机PLC控制系统设计一、系统架构设计1.传感器部分:安装在皮带运输机上的传感器可以包括运输速度传感器、物料流量传感器和皮带张力传感器等。
这些传感器能够实时采集与运输相关的参数信息,提供给PLC控制器进行处理。
2.PLC控制器:选择适合的PLC控制器,根据实际要求进行编程,实现对传感器数据的采集和处理,并根据预先设定的参数进行判定,输出相应的控制信号。
3.控制执行部分:根据PLC控制器输出的控制信号,对皮带运输机的运行进行控制。
常见的控制方式有启动、停止、速度调节、转向等。
二、PLC编程设计1.采集和处理:PLC控制器根据传感器采集的数据,对其进行处理和分析。
例如,可以通过计算连续三次数据平均值,减小因数据波动而造成的影响。
2.状态判断:根据传感器采集的数据以及预设的参数,对皮带运输机的状态进行判断。
例如,可以通过物料流量传感器判断物料是否充足,通过皮带张力传感器判断皮带是否松弛等。
3.控制输出:根据状态判断的结果和预设的控制逻辑,PLC控制器输出相应的控制信号。
例如,当物料流量不足时,PLC控制器可以输出启动信号,使皮带运输机开始运行。
三、具体功能设计1.启动和停止控制:根据传感器采集的物料流量和皮带张力等信息,PLC控制器可以自动判断何时启动或停止皮带运输机。
当物料流量低于设定值时,PLC控制器输出启动信号,使皮带运输机开始运行;当物料流量达到设定值或超过设定值时,PLC控制器输出停止信号,使皮带运输机停止运行。
2.运行速度控制:在运输过程中,根据物料的性质和工艺要求,需要调节皮带运输机的运行速度。
PLC控制器可以根据传感器采集的参数信息,自动调节皮带运输机的运行速度,以实现最佳的运输效果。
3.报警和故障诊断:根据传感器采集的数据和PLC编程设计,PLC控制器可以实时监测皮带运输机的运行状态,当出现异常情况或故障时,及时进行报警,并进行相应的故障诊断和处理。
四、安全设计与人机界面1.安全设计:在PLC控制系统设计中,安全是一个重要的考虑因素。
PLC物料运输控制系统

PLC物料运输控制系统简介在工业生产过程中,物料的运输控制是一个至关重要的环节。
PLC(Programmable Logic Controller)物料运输控制系统作为一种可编程逻辑控制器,为物料的运输过程提供了可靠的控制和监测手段。
本文将介绍PLC物料运输控制系统的原理、组成和工作流程,同时探讨其在工业生产中的应用。
原理PLC物料运输控制系统的原理基于可编程逻辑控制器的运行。
PLC是一种专门设计用于工业自动化控制的计算机控制系统,其内部包含多种传感器、执行器和通信接口。
通过PLC 的编程软件,用户可以灵活地配置控制逻辑和运行参数,以实现对物料运输过程的精确控制。
组成PLC物料运输控制系统主要由以下组成部分构成:1.PLC主控单元:PLC主控单元是整个系统的核心,负责接收和处理传感器信号,同时根据用户编写的控制逻辑进行计算和决策。
PLC主控单元通常具有高性能的处理器和大容量的存储器,以支持复杂的控制算法和数据存储。
2.传感器:传感器用于感知物料运输过程中的各种参数,例如物料的位置、速度、温度等。
常见的传感器包括光电开关、压力传感器、温度传感器等。
通过与PLC主控单元的通信接口,传感器将实时采集到的数据发送给PLC进行处理。
3.执行器:执行器用于在物料运输过程中实施控制。
根据PLC主控单元的指令,执行器可以对物料进行推、拉、旋转等动作。
常见的执行器包括电动阀门、马达、气缸等。
4.通信接口:通信接口用于与其他设备进行数据交换和信息传递。
例如,PLC物料运输控制系统可以通过以太网接口与上位机通信,将采集到的数据上传到数据库,或接收来自上位机的控制指令。
工作流程PLC物料运输控制系统的工作流程通常包括以下几个步骤:1.传感器采集数据:传感器实时采集物料运输过程中的各种参数,如物料的位置、速度、温度等。
采集到的数据通过通信接口发送给PLC主控单元。
2.PLC主控单元处理数据:PLC主控单元接收传感器发送的数据,并根据用户编写的控制逻辑进行计算和决策。
基于PLC的物料运送控制系统的设计

基于PLC的物料运送控制系统的设计一、概述物料运送控制系统是指通过使用可编程逻辑控制器(PLC)来控制物料的运输过程,以提高生产效率和减少人力成本。
本文将介绍一个基于PLC的物料运送控制系统的设计方案。
二、系统架构该物料运送控制系统主要由以下组件组成:传感器、执行器、PLC和人机界面(HMI)。
传感器用于监测物料的位置和状态,执行器用于控制物料的运输,PLC用于收集传感器数据、进行逻辑控制和发送指令,HMI 用于显示系统状态和操作。
三、系统功能1.实时监测和控制物料位置:通过安装传感器,可以实时监测物料的位置,并将该信息传输给PLC。
PLC可根据传感器数据控制执行器来实现物料的精确定位和运输。
2.自动化物料运输:PLC可以通过编写逻辑控制程序自动控制物料的运输,如启动和停止执行器、调整执行器的运行速度等。
系统可以根据任务需求和进料情况自动调整物料的运输速度,以提高生产效率和降低物料损耗。
3.报警和异常处理:系统可以通过传感器监测物料的位置和状态,一旦发现异常情况(如物料脱落、堵塞等),PLC可以发送报警信号,并通过HMI向操作员显示详细信息。
操作员可以及时采取措施进行处理。
4.可编程性和灵活性:PLC具有高度的可编程性,可以根据生产需求进行灵活调整。
通过修改控制程序,系统可以适应不同的物料类型、运输方式和生产线布局。
四、系统设计步骤1.确定物料运输需求:根据工厂的物料运输需求和生产流程,确定物料运输的起点、终点、运输距离和速度要求。
2.选择传感器和执行器:根据需要监测的物料位置和状态,选择适合的传感器。
根据物料运输的要求,选择适合的执行器,如电动滚筒、输送带等。
3.设计PLC控制程序:根据物料运输的需求和执行器的特性,编写PLC控制程序。
程序应包括物料位置监测、执行器控制、报警处理等功能。
4.设计HMI界面:根据系统需求和操作员的操作习惯,设计直观、易用的HMI界面。
界面应包括系统状态显示、参数设置、报警信息显示等功能。
PLC的运输带控制系统
题目运输带控制系统姓名:刘保坤班级:P14电气5班学号:2014031400042016 10。
20目录摘要 (2)Abstract (3)第一章引言 (4)1.1运输带在生产中的应用 (4)1。
2 PLC控制及发展 (4)1。
3控制系统人机界面作用及发展 (5)第二章系统设计 (8)2.1系统的硬件设计 (8)2。
1。
1设计方案 (8)2。
1。
2控制电路设计 (9)2.1.3主电路设计 (9)2。
2 系统软件设计 (10)2.2。
1控制要求 (10)2。
2.2控制功能的实现 (11)2.2.3手动/自动程序梯形图 (11)第三章触摸屏画面组态 (12)第四章系统调试与运行操作 (14)4.1调试过程 (14)4。
2运行操作 (14)结束语 (15)参考文献 (16)致谢 (17)附录............................................ 错误!未定义书签。
摘要工业自动化是机器设设备或生产过程在不需要人工直接干预的情况下,按预期的目标实现测量、操纵等信息处理和过程控制的统称。
自动化技术就是探索和研究实现自动化过程的方法和技术.它是涉及机械、微电子、计算机等技术领域的一门综合性技术。
工业革命是自动化技术的助产士.正是由于工业革命的需要,自动化技术才冲破了卵壳,得到了蓬勃发展。
同时自动化技术也促进了工业的进步,如今自动化技术已经被广泛的应用于机械制造、电力、建筑、交通运输、信息技术等领域,成为提高劳动生产率的主要手段。
结合当今社会形式,我设计了一种基于西门子PLC的触摸屏运输带控制系统。
本设计能满足简单的传送带控制,操作简便,简单易懂,界面友好。
可以实现手动启停,自动启停,并有报警系统。
关键词:自动控制、传送带、PLCAbstractIndustrial automation is a machine equipment or manufacturing process do not need artificial direct intervention in the case, according to the expected goals measurement, control, information processing and process control collectively. Automation technology is to explore and research process automation of the methods and technology. It is related to the mechanical, microelectronics and computer technology in the field of a comprehensive technology。
四节传送带PLC模拟控制系统

电机
驱动传送带运转的动力来源, 通常采用三相异步电机。
传送带
承载物料,通过连续运动将物 料从一个位置输送到另一个位 置。
控制系统
由PLC、继电器、接触器等组 成,用于控制电机启停、调节 传送带速度等。
工作原理
当物料放置在传送带上时,传感 器检测到物料的数量和位置信息。
PLC控制系统根据传感器反馈的 信息,控制电机的启停和转速,
进入20世纪后,随着自动化技术的不断发展,PLC等控制系 统的出现,传送带的发展也进入了新的阶段。四节传送带 PLC模拟控制系统就是其中的代表之一,它能够实现对传送 带的精确控制,提高了生产效率和产品质量。
02
四节传送带系统
系统构成
减速器
降低电机转速,增大扭矩,使 传送带能够平稳运行。
传感器
检测传送带上物料的数量、位 置等信息,为PLC控制系统提 供反馈。
特点
高可靠性、灵活性、易于编程和易于扩展等。
PLC的工作原理
输入采样
PLC读取输入端子的状态,并将 其存储在输入映像寄存器中。
程序执行
PLC按照从上到下的顺序扫描用户 程序,并根据输入映像寄存器中的 数据执行相应的逻辑运算或指令。
输出更新
在程序执行完成后,PLC将输出映 像寄存器中的数据写入到输出模块, 从而控制外部设备。
模拟控制系统的搭建
确定系统规模和要求
选择合适的PLC
根据实际需求,确定控制系统的规模和功 能要求,如控制节数、传送带速度、物料 检测等。
根据系统规模和要求,选择合适的PLC型号 和规格,确保其具有足够的输入输出点数 、处理速度和通讯能力。
配置输入输出模块
编写控制程序
根据实际控制需求,配置适当的输入输出 模块,如限位开关、传感器、电磁阀等。
基于PLC的传送带控制系统设计
基于PLC的传送带控制系统设计第一章:引言随着现代工业的快速发展,传送带在物料运输方面发挥着重要的作用。
为了提高生产效率和安全性,传送带控制系统成为了关键的技术。
其中,基于可编程逻辑控制器(PLC)的传送带控制系统被广泛应用于各种行业。
本文将介绍基于PLC的传送带控制系统的设计原理、硬件配置、软件编程以及性能优化等方面的内容,旨在为读者提供一种全面的设计指南。
第二章:设计原理2.1 传送带控制系统概述传送带控制系统用于控制传送带的运行状态,包括启停、速度调节、方向控制以及故障检测等。
通过PLC的集成设计,可以实现对传送带的全面控制。
2.2 控制策略设计传送带控制系统的主要控制策略包括手动控制、自动控制以及远程控制等。
根据具体的应用场景,设计合适的控制策略是确保传送带安全稳定运行的关键。
第三章:硬件配置3.1 传感器选择与布置通过传感器的检测,可以实现对物料的监测、定位以及故障检测等功能。
在传送带控制系统设计中,选择合适的传感器并合理布置是确保控制系统高效运行的基础。
3.2 PLC控制器选型PLC控制器是传送带控制系统的核心设备,其性能和功能直接影响整个控制系统的性能。
合理选择PLC控制器,并配备适当的输入输出模块,可以满足不同应用的需求。
3.3 电机控制器设计传送带的运行依赖于电机的驱动,因此电机控制器的设计在整个控制系统中占据着重要的地位。
选择合适的电机控制器,并进行恰当的配置和编程,可以实现传送带的平稳运行。
第四章:软件编程4.1 PLC编程设计PLC编程是设计控制系统的关键环节,需要根据具体的控制策略,利用PLC编程软件进行程序设计。
本章将介绍PLC编程的基本原理和常用的编程语言,以及在传送带控制系统中的应用。
4.2 状态监测与故障检测传送带控制系统需要实现对传送带的状态监测和故障检测。
通过合理设置检测程序,并编写相应的故障处理程序,可以提高控制系统对异常情况的响应能力。
第五章:性能优化5.1 传送带速度控制传送带的速度控制是提高生产效率的关键,通过PLC编程和配置合适的速度传感器,可以实现对传送带速度的精确控制。
基于PLC运输及控制系统的设计

【摘要】 (2)【前言】 (3)【三菱可编程控制器介绍】 (5)1.1FX2N系列PLC的结构特点 (6)1.2FX2N系列PLC的基本组成 (7)【FX2N系列可编程控制器内部元件及功能】 (8)1.21输入继电器(X0) (8)1.22输出继电器(Y) (8)1.23辅助继电器(M) (8)1.24状态器(S) (9)1.25定时器(T) (9)1.26计数器(C) (10)1.27数据寄存器(D) (11)1设计目的 (13)2设计思路 (13)3设计过程 (13)3.1PLC输入/输出端子接线图 (13)3.2程序设计 (14)3.3皮带传输机控制原理 (17)4系统调试与结果…………………………………………………………………………..18/4.1系统调试 (18)4.2调试结果 (18)5主要元器件与设备 (19)6课程设计体会与建议 (20)7参考文献 (21)8附录 (22)8.1指令语句表 (22)8.2梯形图 (24)摘要皮带运输机是当代最为得力的输送设备之一,在整个输送机范畴中,它是应用最为广泛的一种设备,它的产生已有上百年的历史了,现以成为冶金、矿山、水泥、码头、化工、粮食等行业最主要的运输工具。
早期皮带运输机由于其功率小、运距短、速度低,应用受到一定限制。
现针对皮带运输机控制系统中存在的问题,把可编程序控制器和变频器应用于皮带运输机控制系统上,利用可编程控制器取代继电器进行控制皮带运输机的起动和停止。
提高了系统的可靠性,系统的调速控制采用变频器进行变频调速,使调速性能更加稳定,保证了可靠。
输送机是在一定的线路上连续输送物料的物料搬运机械,又称连续输送机。
输送机可进行水平、倾斜和垂直输送,也可组成空间输送线路,输送线路一般是固定的。
输送机输送能力大,运距长,还可在输送过程中同时完成若干工艺操作,所以应用十分广泛。
可以单台输送,也可多台组成或与其他输送设备组成水平或倾斜的输送系统,以满足不同布置形式的作业线带式输送机是输送能力最大的连续输送机械之一。
基于PLC的运输带控制系统设计

基于PLC的运输带控制系统设计可编程控制器(2)期末大作业班级:P09电气四班姓名:学号:09031104212011年7月目录第1章运输带控制发展 (2)1.1运输带在生产中的应用 (2)1.2PLC控制及发展 (3)1.3控制系统人机界面作用及发展 (4)第二章系统硬件设计 (5)2.1设计方案 (5)2.2控制电路设计 (6)2.3主电路设计 (7)第三章系统软件设计 (8)3.1PLC程序设计 (8)3.2触摸屏画面组态 (14)第四章系统调试与运行操作 (18)4.1调试过程 (18)4.2运行操作 (21)参考文献 (23)第1章运输带控制发展1.1 运输带在生产中的应用运输带又称输送带,由几层纤维织物与橡胶粘合而成的一种胶带。
用于运输块状、粒状、粉状或成件物品等。
有叠层式运输带和包层式运输带两种,也有两种同时并用。
叠层式的夹布层由挂胶帆布组成,可使带身柔软和富有弹性,适用于运输各种物品。
包层式用于运输细小而不易磨损运输带的物质,如粉末状物质等。
普通运输带适宜在坡度不大或沿水平方向运送物品。
升降机运输带可运送坡度大或垂直方向的物品,外面覆盖胶,可以升起沉得的、湿的或坚硬的物质,如矿石、石块、焦炭、煤、玻璃等。
各类运输带可制成有接头和环形无接头两种。
一般根据带的宽度(300~1500毫米)和织物层数(3~12层)分为各种规格。
按用途可分耐寒、耐热、耐油、食品工业用等运输。
运输带广泛用于建材、化工、煤炭、电力、冶金等部门,适用于常温下输送非腐蚀性的无尖刺的块状、粒状、粉末的多种物料、如煤炭、焦炭、砂石、水泥等散物(料)或成件物品,输送堆积密度为6.5~2.5t/m3的各种块状、粒状、粉状等松散状物料,也可用于成体物品输送。
1.2 PLC控制及发展早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller,PLC),它主要用来代替继电器实现逻辑控制。
基于PLC物流控制系统设计
基于PLC物流控制系统设计
前言
PLC(可编程逻辑控制器)已经在工业自动化领域广泛应用,是自动化控制领域中的重要设备。
本文将介绍基于PLC物流控制系统的设计,旨在提高物流企业的自动化控制水平,降低成本,提高效率和安全性。
设计方案
PLC控制系统采用三大模块设计:
输入输出模块
输入模块主要有传感器模块和按钮模块两种,传感器主要用于感知并获取外部环境和状态信息,如光电开关、压力传感器、温湿度传感器等。
按钮模块主要用于手动控制和人机交互。
输出模块主要有执行机构和指示灯模块两种,执行机构用于控制相关设备运动,如电磁阀、电机、气缸等。
指示灯模块用于显示相关设备状态,如开/关、工作/故障等。
PLC控制模块
PLC控制模块是整个系统的核心,用于接收输入信号并进行逻辑处理和控制输出信号,确保设备运行在正确的时间、速度、方向和步骤。
通讯模块
通讯模块用于将PLC控制系统与计算机、物联网等其他设备进行连接和通信,以实现状态监测、数据处理、信息传递等功能。
应用案例
以自动化物流仓储系统为例,PLC控制系统的常用应用有以下几个方面:
- 运输线路控制
- 货物堆垛机控制
- 输送带控制
- 车辆调度和跟踪
结论
基于PLC物流控制系统的设计,可以提高物流企业的自动化控制水平,降低成本,提高效率和安全性。
随着物流行业的飞速发展,PLC控制系统在物流自动化领域中的应用前景非常广阔,值得进一步探索和研究。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目运输带控制系统姓名:刘保坤班级:P14电气5班学号:2016 10.20目录摘要工业自动化是机器设设备或生产过程在不需要人工直接干预的情况下,按预期的目标实现测量、操纵等信息处理和过程控制的统称。
自动化技术就是探索和研究实现自动化过程的方法和技术。
它是涉及机械、微电子、计算机等技术领域的一门综合性技术。
工业革命是自动化技术的助产士。
正是由于工业革命的需要,自动化技术才冲破了卵壳,得到了蓬勃发展。
同时自动化技术也促进了工业的进步,如今自动化技术已经被广泛的应用于机械制造、电力、建筑、交通运输、信息技术等领域,成为提高劳动生产率的主要手段。
结合当今社会形式,我设计了一种基于西门子PLC的触摸屏运输带控制系统。
本设计能满足简单的传送带控制,操作简便,简单易懂,界面友好。
可以实现手动启停,自动启停,并有报警系统。
关键词:自动控制、传送带、PLCAbstractIndustrial automation is a machine equipment or manufacturing process do not need artificial direct intervention in the case, according to the expected goals measurement, control, information processing and process control collectively. Automation technology is to explore and research process automation of the methods and technology. It is related to the mechanical, microelectronics and computer technology in the field of a comprehensive technology. The industrial revolution is the automation technology of the midwife. It is because of the needs of the industrialrevolution, automation technology just broke through the egg shell, obtained the vigorous development. At the same time automation technology also promoted the progress of industry, now automation technology has been widely used in mechanical manufacturing, power, construction, transportation, information technology and other fields, and become the main means to improve labor productivity.On the social form, I design based on Siemens PLC touch screen with transportation control system. This design can satisfy simple conveyor belt control, simple operation, easy to understand and friendly interface. Can achieve manually rev. Stop, stop, and automatic and alarm system. Keywords: automatic control, the conveyor belt, PLC第一章引言1.1运输带在生产中的应用运输带输送是基于PLC的自动控制系统,它在水泥、煤炭、冶金、化工、饲料、食品等行业有很广泛的应用。
具有功能全面,灵活性强,性价比高等特点,受到连续配料系统集成商和用户的欢迎。
该系统集现代物流技术、仓储技术、自动化技术于一体,是CIMS中的重要环节,在国外已经得到较广泛的应用,该技术也正在逐渐地应用于我国许多行业中。
加盟WTO后,我国商品分销、配送服务市场将逐步扩大开放的领域和范围。
而物流是企业发展的关键问题,物流会影响企业总体的生存和发展。
在2000年物流成本占国内国民经济生产总值(GDP)的16.7%,而美国仅为10%以下。
尤其是企业的物流设备水平与发达国家之间存在着巨大的差距,主要表现为,运输效率低,物流过程浪费惊人。
我们知道,差距就是潜力和发展空间,因此,提高物流设备化水平,已成为当务之急。
自动配料车是物流体系中运输分配的重要组成部分,它是能自动地存储和取出物料的系统。
1.2 PLC控制及发展PLC是一种以微处理器为基础的通用工业自动控制装置,它综合了现代计算机技术、自动控制技术和通讯技术,具有体积小、功能强、程序设计简单、维护方便、可靠性高等优点,特别适于在恶劣的工业环境中使用,被称为现代工业自动化的支柱之一。
早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller,PLC),它主要用来代替继电器实现逻辑控制。
随着技术的发展,这种采用微型计算机技术的工业控制装置的功能已经大大超过了逻辑控制的范围,因此,今天这种装置称作可编程控制器,简称PC。
但是为了避免与个人计算机(Personal Computer)的简称混淆,所以将可编程序控制器简称PLC,PLC自1966年美国数据设备公司(DEC)研制出现,现行美国,日本,德国的可编程序控制器质量优良,功能强大。
起源:1968年美国通用汽车公司提出取代继电器控制装置的要求。
1969 年,美国数字设备公司研制出了第一台可编程控制器PDP—14 ,在美国通用汽车公司的生产线上试用成功,首次采用程序化的手段应用于电气控制,这是第一代可编程序控制器,称Programmable,是世界上公认的第一台PLC。
发展:20世纪70年代初出现了微处理器。
人们很快将其引入可编程控制器,使PLC增加了运算、数据传送及处理等功能,完成了真正具有计算机特征的工业控制装置。
此时的PLC为微机技术和继电器常规控制概念相结合的产物。
个人计算机发展起来后,为了方便和反映可编程控制器的功能特点,可编程序控制器定名为Programmable Logic Controller(PLC)。
20世纪70年代中末期,可编程控制器进入实用化发展阶段,计算机技术已全面引入可编程控制器中,使其功能发生了飞跃。
更高的运算速度、超小型体积、更可靠的工业抗干扰设计、模拟量运算、PID功能及极高的性价比奠定了它在现代工业中的地位。
20世纪80年代初,可编程控制器在先进工业国家中已获得广泛应用。
世界上生产可编程控制器的国家日益增多,产量日益上升。
这标志着可编程控制器已步入成熟阶段。
20世纪80年代至90年代中期,是PLC发展最快的时期,年增长率一直保持为30~40%。
在这时期,PLC在处理模拟量能力、数字运算能力、人机接口能力和网络能力得到大幅度提高,PLC逐渐进入过程控制领域,在某些应用上取代了在过程控制领域处于统治地位的DCS系统。
20世纪末期,可编程控制器的发展特点是更加适应于现代工业的需要。
这个时期发展了大型机和超小型机、诞生了各种各样的特殊功能单元、生产了各种人机界面单元、通信单元,使应用可编程控制器的工业控制设备的配套更加容易。
1.3控制系统人机界面作用及发展人机界面装置是操作人员与PLC之间双向沟通的桥梁,很多工业被控对象要求控制系统具有很强的人机界面功能,用来实现操作人员与计算机控制系统之间的对话和相互作用。
人机界面装置用来显示PLC的I/O状态和各种系统信息,接收操作人员发出的各种命令和设置的参数,并将它们传送到PLC。
人机界面装置一般安装在控制屏上,必须能够适应恶劣的现场环境,其可靠性应与PLC的可靠性相同。
过去用按钮、开关和指示灯等作人机界面装置,它们提供的信息量少,而且操作困难,需要熟练的操作人员来操作。
如果用七段数字显示器来显示数字,用拨码开关来输入参数,占用的PLC的I/O点数多,硬件成本高,有时还需要自制印制电路板。
在环境条件较好的控制室内,可以用计算机作人机界面装置。
早期的工业控制计算机用CRT显示器和薄膜键盘作工业现场的人机界面,它们体积大,安装困难,对现场环境的适应能力差。
现在基本上都使用基于液晶显示器(LCD)的操作员面板和触摸屏。
人机界面(Human Machine Interface)又称人机接口,简称为HMI。
从广义上说,HMI泛指计算机(包括PLC)与操作人员交换信息的设备。
在控制领域,HMI一般特指用于操作人员与控制系统之间进行对话和相互作用的专用设备。
西门子公司的手册将人机界面装置统称为HMI设备,本书一般将它们简称为HMI设备。
人机界面是按工业现场环境应用来设计的,正面的防护等级为IP65,背面的防护等级为IP20,坚固耐用,其稳定性和可靠性与PLC相当,能够在恶劣的工业环境中长时间连续运行,因此人机界面是PLC的最佳搭档。
人机界面用于承担下列任务:●过程可视化:在人机界面上动态显示过程数据(即PLC采集的现场数据)。
●操作员对过程的控制:操作员通过图形界面来控制过程。
例如,操作员可以用触摸屏画面上的输入域来修改控制系统的参数,或者用画面上的按钮来起动电动机。
●显示报警:过程的临界状态会自动触发报警,例如当变量超出设定值时。
●记录(归档)功能:顺序记录过程值和报警信息,用户可以检索以前的生产数据。
●输出过程值和报警记录:例如可以在某一轮班结束时打印输出生产报表。
●过程和设备的参数管理:将过程和设备的参数存储在配方中,可以一次性将这些参数从人机界面下载到PLC,以便改变产品的品种。
在使用人机界面时,需要解决画面设计和与PLC通信的问题。
人机界面生产厂家用组态软件很好地解决了这两个问题。
组态软件使用方便、易学易用。
使用组态软件可以很容易地生成人机界面的画面,还可以实现某些动画功能。
人机界面用文字或图形动态地显示PLC中开关量的状态和数字量的数值。
通过各种输入方式,将操作人员的开关量命令和数字量设定值传送到PLC。
各种品牌的人机界面一般都可以和各主要生产厂家的PLC通信。
用户不用编写PLC和人机界面的通信程序,只需要在PLC的编程软件和人机界面的组态软件中对通信参数进行简单的设置,就可以实现人机界面与PLC的通信。