履带车辆设计计算说明..
履带底盘的组成介绍及各参数的计算

式中 B – 轨链节高度; D – 销子套外径; - 轨链节最小厚度。
轨链节的主要破坏形式仍为踏面磨损。
履带板宽度b由设计规定的机械平均单位接地压力Pp确定
b Gt 2 LP p
应处理好参数b和履带接地长度L的关系。窄而长的履带, 滚动阻力小(因土壤变形阻力较小),牵引附着性能较好, 但转向阻力较大。b/L之值一般为:
设计履带架时,要妥善确定履带架摆动轴线、驱动轮 轴线、导向轮轴线间的距离。
图8-3为TY150推土机行走系布置图。其履带架铰接中 心线与驱动轮轴线重合。
右图8-4为D10推土 机行走系布置图,其履 带架铰接中心线与驱动 轮轴线不重合。
现代结 构的半刚性 悬架履带拖 拉机中,广 泛采用平衡 梁,如右图 8-5所示。
图8-6之结构对履带防尘未考虑,这是其不足之处。在 D80A推土机轨链节的凹槽中各放置了一个防尘圈,这样 以来对于防止灰尘砂砾的进入很有效,使履带销和销子 套间的磨损大为减小,如下图8-7所示。
另一种密封式履带其结 构见右图8-8所示。
由于履带密封技术在实 践中卓有成效,国内外又研 制成功另一种密封润滑履带, 其结构见右图8-9所示。
二、车架 型式:全梁式、半梁式两种。
全梁架式车架是一完整的框架,如东方红75拖拉机, Caterpillar后置发动机式装载机等采用这种全梁式车架。
半梁架式车架一部分是梁架,而另一部分则利用传动 系的壳体。这种车架广泛用于工程机械履带拖拉机中。
如图7-1为两根箱形纵梁和后桥桥体焊成一体,其前 部用横梁相连。
1、节销式啮合:驱动轮轮齿与履带板的节销进行啮合。
这种啮合方式履带销所在的圆周近似地等于驱动轮 的节圆,驱动轮轮齿作用在节销上的压力通过履带销的 中心,如图8-6和8-7所示。
履带底盘的组成介绍及各参数的计算课件

2、履带式机械倒档越过沟渠,其全部重量支承在引导轮
和驱动轮上;
最新 PPT
中南大学 杨忠炯
3、履带式机械倒档越过一突起的障碍物,其全部重量支承 在两边各一个支重轮上,此支重轮是重心附近的支重轮。
计算步骤:由这三种工况计算出各危险断面垂直面内的弯 矩,再考虑在这些位置上同时又在转弯,从而将水平面内 的弯矩叠加进来。在分别计算应力值后,再计算其应力之 和。
齿式约小10%左右。这种履带板适用
于履带式装载机。
最新 PPT
中南大学 杨忠炯
寒冷地带冬季用履带板:其抓土齿的支承面上开有 缺口,中间开一个缺口为双刃式,两侧开两个缺口 为单刃式。
由于支承面面积减少,保证履齿陷入冰雪内, 从而提高了拖拉机的牵引附着性能。缺口只在抓土 爪的上端,因此它在粘砂土或砂粘土等土壤上作业 时,和一般用途的履带板几乎没有区别。为了使履 带板能够自净化,其支承面留有方孔。
Pmax=.0.75Gt
式中 - 附着系数,履带式机械初算时可取 =1; Gt – 推土机总重.
组合式履带由履带板、轨链节、履带销、销套、螺栓 等零件组成。
一般来讲,销子的剪切、销与销套间的挤压、销子的 抗弯强度都不成问题,因为履带的主要破坏形式是磨损。
最新 PPT
中南大学 杨忠炯
右图8-12所 示轨链节11、2-2、33断面处常 出现断裂。
要求:具有良好的附着性能、足够的强度、刚度和耐磨性, 重量尽可能轻。
最新 PPT
中南大学 杨忠炯
每条履带都由几十 块履带板组成,如 右图8-6所示。 履带板由具有履齿的 支承板和两根导轨组 成。
履带销与前一块 履带板的后铰链孔采 用压配合,压入力均 为500~750kN。
最新 PPT
爬山虎履带车计算公式
爬山虎履带车计算公式爬山虎履带车是一种专门用于越野行驶的车辆,它具有优秀的爬坡能力和通过障碍物的能力,因此在军事、野外探险和工程施工等领域得到了广泛的应用。
在设计和制造爬山虎履带车时,需要考虑到各种因素,其中包括车辆的功率、重量、履带的尺寸和材质等。
为了保证爬山虎履带车的性能和安全性,需要进行一系列的计算和测试。
首先,我们来看一下爬山虎履带车的功率计算公式。
爬山虎履带车的功率主要包括动力系统的功率和履带的摩擦功率。
动力系统的功率可以通过发动机的输出功率来计算,而履带的摩擦功率则可以通过履带的材料、尺寸和行驶速度来计算。
一般来说,爬山虎履带车的功率计算公式可以表示为:总功率 = 动力系统功率 + 履带摩擦功率。
其中,动力系统功率可以通过发动机的输出功率来计算,而履带摩擦功率可以通过履带的材料、尺寸和行驶速度来计算。
通过这个公式,我们可以得到爬山虎履带车所需的总功率,从而选择合适的发动机和履带材料。
其次,我们来看一下爬山虎履带车的重量计算公式。
爬山虎履带车的重量主要包括车辆本身的重量和所携带的货物或设备的重量。
在设计和制造爬山虎履带车时,需要考虑到车辆本身的重量和所携带货物或设备的重量,以保证车辆的稳定性和安全性。
一般来说,爬山虎履带车的重量计算公式可以表示为:总重量 = 车辆本身重量 + 货物或设备重量。
通过这个公式,我们可以得到爬山虎履带车的总重量,从而选择合适的履带和悬挂系统。
接下来,我们来看一下爬山虎履带车的履带尺寸计算公式。
爬山虎履带车的履带尺寸主要包括履带的长度、宽度和厚度。
在设计和制造爬山虎履带车时,需要考虑到履带的尺寸和材料,以保证车辆的越野性能和通过障碍物的能力。
一般来说,爬山虎履带车的履带尺寸计算公式可以表示为:履带尺寸 = 履带长度×履带宽度×履带厚度。
通过这个公式,我们可以得到爬山虎履带车的履带尺寸,从而选择合适的履带材料和结构。
最后,我们来看一下爬山虎履带车的爬坡能力计算公式。
车辆牵引力计算(履带行走或轮式工程车)

履带驱动轮设计计算
履带驱动轮设计计算
履带驱动轮设计计算
履带驱动轮是履带式运输机械中非常重要的部件,其设计计算对于运输机械的正常运行和寿命有着至关重要的作用。
设计计算步骤:
1. 首先确定所需扭矩,并结合轮胎尺寸和滑移率计算出轮子的直径。
2. 然后根据轮子直径确定轮轴的直径,并考虑受力情况计算出所需的材料强度。
3. 车辆行驶时,驱动轮承受着不同的载荷,因此需要进行静态和动态的载荷分析,以确保轮子、轴和轴承的强度足够。
4. 驱动轮与履带的咬合应该足够牢固且不易滑动,因此需要考虑咬合力和摩擦力,以保证车辆行驶安全和稳定。
5. 最后,需要对驱动轮进行动平衡和静平衡,以保证车辆行驶平稳、不产生震动和噪音。
通过以上设计计算步骤,可以设计出符合需求的履带驱动轮,确保其在实际使用中能够正常运行、稳定可靠。
履带计算和发动机的选型---精品资料
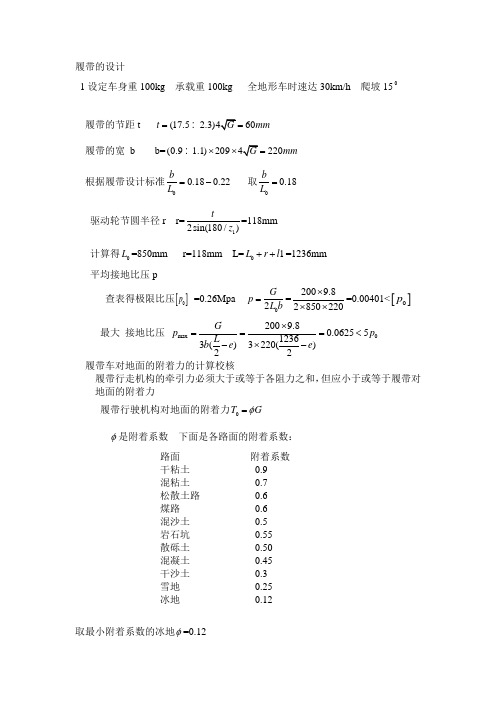
履带的设计1设定车身重100kg 承载重100kg 全地形车时速达30km/h 爬坡150履带的节距t (17.5 2.3)460t G mm ==履带的宽 bb=(0.9 1.1)209220mm ⨯⨯=根据履带设计标准00.180.22b L =- 取0b L =0.18 驱动轮节圆半径r r=12sin(180/)t z =118mm 计算得0L =850mm r=118mm L=01L r l ++=1236mm平均接地比压p查表得极限比压[]0p =0.26Mpa 02G p L b ==2009.82850220⨯⨯⨯=0.00401<[]0p 最大 接地比压 max 02009.80.0625512363()3220()22G p p L b e e ⨯===<-⨯- 履带车对地面的附着力的计算校核履带行走机构的牵引力必须大于或等于各阻力之和,但应小于或等于履带对地面的附着力履带行驶机构对地面的附着力0T G φ=φ是附着系数 下面是各路面的附着系数:路面 附着系数干粘土 0.9混粘土 0.7松散土路 0.6煤路 0.6混沙土 0.5岩石坑 0.55散砾土 0.50混凝土 0.45干沙土 0.3雪地 0.25冰地 0.12取最小附着系数的冰地φ=0.1200.122009.8235.2T G N φ==⨯⨯= 履带下垂量 h 0(0.0150.03)12.7525.5h L mm ==履带的静态张紧力 22018549.859442060L g T N ht ⨯⨯===⨯⨯ g 是履带的重量履带行走机构牵引力的计算2s i n f T T T f G Gτα=+=+ f T —— 滚动阻力 ; T τ——坡道阻力f 是摩擦系数: 路面 摩擦系数混凝土 0.05冰雪地 0.03-0.04坚实路面 0.07松散土路 0.10泥泞地 沙地 0.1-0.15取最大摩擦系数f=0.1521sin 0.152009.8sin152009.8784f T T T fG G N α=+=+=⨯⨯+⨯= > 0T 计算结果说明冰地用最大的牵引力履带车上坡上不去设路面是雪地 计算0T =490N< 2T 雪地用最大的牵引力爬坡上不去 设路面为干沙土0T =580N< 2T 干沙土用最大的牵引力爬15的坡也上不去设路面为混凝土0T =882>2T 所以混凝土路面可以用最大的牵引力爬15度的坡 这样 其他的路面也都能用最大的牵引力爬15度坡我们可以设定路面为附着力最大路面φ=0.9 计算得 最大爬坡为48度 发动机的的确定已知 履带车速度为30km/h,最大牵引力为784N 设总传动比为0.82 P=2T ν/η总P=2T ν/η总=7969w=7.969kw根据算出的最大功率 我选宗申zs157FMJ 发动机下面是此型号发动机的技术参数:宗申宗申zs157FMJ发动机。
履带车辆设计计算说明书

整车参数计算根拯《GB/T 3871.2-2006农业拖拉机试验规程第2部份:整机参数测量》标准要求进行计算:一. 基本参数二、质量参数的计算1、整备质量Mo为1825kg ;2、总质量懸M总=MO+M1+ M2 二1825+300+75二2200 kg血载质量:300kg M2驾驶员质量:75kg3、使用质M: M总二M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871. 15-2006农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0二830mm质心至前支承点的距离B二610mm质心至地而的距离h0=450mm满载时:质心至后支承点的距离A0二605mm质心至前支承点的距离B二812mm质心至地而的距离h0二546mm5、稳左性计算a、保证拖拉机爬坡时不纵向翻倾的条件是:% > 戶.7 (§为滑转率)空载时:830/450=1. 84>0.7满载时:605/546=1.11 >0.7满足条件。
b、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:/2/1 > =0. 7 a—轨距,a二1200mm h—质心至地而距离mm空载:丿2烈八二1・33>0・72x450满载:J???二I K)〉。
.?2x546故拖拉机在空、满载运行中均能满足稳是性要求。
三、发动机匹配根据《GB/T 1147. 1-2007中小功率内燃机第1部份:通用技术条件》标准要求进行计算: XJ-782LT履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标圧功率为57kW/h,转速为2600r/min.(1) 最髙设讣车速鼻弐km/h,所需功率: 尸z •二丄(巴+几)kwn 「3 -1 "・g ・f ・V 唤、,Cd-A-V m ax x ; =-( ---- --- ---- )+( ---------- ) kmn[ 3600 761401—而=6.188kW(2) 根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 0选用 V2=4km/h,最大爬坡度为25%时,讣算所需功率:=1 "g •八)+宀皿必)胁77 L 3600 3600 76140 _1 r 2200x9.8x0.02x8, z 2200x9.8x0.25x4 x 0.9xl.4xl.l5x43 x 0.9 L 3600 3600 76140=6. 948kw 上述两式中:P.——滚动阻力消耗的功率: P.一一空气阻力消耗的功率:匚一一坡度阻力消耗的功率; n —传动效率系数,取耳二0.9: /一一滚动阻力系数,取£0.02; q ——空气阻力系数,取q 二0.9:A ——拖拉机前进方向迎风而积A=BXH (宽X 髙)二1.40X1. 15y 一一拖拉机取低档速度K=4km/h;1 一一最大爬坡坡度,i =25%;(2200x9g().02xb +(().9xl.4xl.l5x8‘360076140G一一拖拉机总质量,G总二2200kg。
SWCC75履带自卸车总体设计及方案分析

SWCC75履带自卸车总体设计及方案分析SWCC75履带自卸车是一种适用于矿山、建筑等环境的运输设备,具有自卸、适应恶劣路况以及较高的载重能力等优点。
本文将从总体设计和方案分析两个方面介绍SWCC75履带自卸车的设计和优化。
一、总体设计1. 基本结构:SWCC75履带自卸车采用双层式结构,由底层车架、中层自卸箱和上层驾驶室组成,整体结构牢固,耐久性强。
2. 车架结构:车架采用高强度钢材,由桥架、横梁、纵梁等组成,具有较高的承载能力和稳定性。
3. 自卸箱结构:中层自卸箱采用侧翻卸料方式,结构简单实用,卸料速度快,有效提高了卸货效率。
4. 驾驶室结构:驾驶室采用全封闭式设计,配备空调和暖风,可以在极端环境下保证驾驶员的工作安全和舒适性。
5. 履带结构:车辆采用四履带结构,每个履带由众多小链环组成,具有极强的耐磨性和抗压能力。
6. 动力系统:车辆采用柴油发动机作为动力源,能够提供足够的动力支持车辆的运行,同时还具有低噪音、低排放等优点。
二、方案分析1. 车辆重心:在SWCC75履带自卸车设计过程中,需要考虑车辆的重心问题,因为履带自卸车在翻卸货物的过程中,容易出现倾翻的情况,所以需要通过优化车辆结构和配重等方案,提高车辆的稳定性和安全性。
2. 车辆载重能力:SWCC75履带自卸车的载重能力为约75吨,但在实际使用过程中,需要考虑车辆在不同路况下的行驶情况,如果路况较差或者卸货地点不方便,车辆的载重能力可能受到限制。
3. 自卸箱结构优化:在SWCC75履带自卸车的设计中,需要充分考虑自卸箱的结构优化,尽可能简化车辆的结构,使自卸箱的重量尽可能地轻量化,并且可以适应不同宽度和高度的货物,提高自卸效率。
4. 履带轮胎优化:履带轮胎是履带自卸车重要的组成部分,因此需要考虑轮胎材质和结构优化,使其具有耐磨性强、承载能力高等特点,同时在不同的路面情况下,能够更好地适应车辆的行驶需求。
总之,SWCC75履带自卸车是一种具有高效、稳定和安全等优点的运输设备,其设计和方案优化需要从整体结构、配重、自卸箱、履带轮胎等多个方面进行考虑和改进,以满足车辆的实际使用需求。
履带车差速控制数学解算
履带车差速控制数学解算摘要:一、引言二、履带车差速控制原理1.差速器的作用2.控制原理简介三、数学模型建立1.建立过程2.关键参数四、数学解算方法1.解算方法简介2.计算步骤五、案例分析1.实际应用背景2.解算结果及分析六、总结正文:一、引言随着科技的发展,履带车在工程、军事等领域中得到了广泛的应用。
为了提高履带车的行驶稳定性和操控性,差速控制技术显得尤为重要。
本文将介绍履带车差速控制的数学解算方法。
二、履带车差速控制原理1.差速器的作用差速器是履带车传动系统的重要组成部分,它能实现两侧履带转速的独立控制,提高车辆的行驶稳定性和通过性。
2.控制原理简介履带车差速控制主要通过调整差速器内部行星架的齿轮组合来实现。
根据不同的工况需求,控制差速器输出扭矩的大小和方向,从而达到控制履带转速的目的。
三、数学模型建立1.建立过程首先,根据差速器的结构特点和动力传动原理,建立其动力学模型。
然后,通过一系列的假设和简化,得到一个简化的数学模型。
2.关键参数在建立数学模型时,需要确定一些关键参数,如行星架的齿轮组合、传动比等。
这些参数将直接影响到模型的精确性和实用性。
四、数学解算方法1.解算方法简介本文采用数值解算方法,通过迭代求解差速器输出扭矩与输入扭矩之间的关系式,得到满足工程需求的解算结果。
2.计算步骤计算过程主要包括输入参数的确定、数学模型的数值求解以及结果分析等步骤。
五、案例分析1.实际应用背景以某型号履带车为例,阐述差速控制在实际应用中的重要性。
2.解算结果及分析通过数学解算方法,得到该履带车在不同工况下的差速控制参数。
分析这些结果,可以发现差速控制对车辆性能的影响,为进一步优化设计提供依据。
六、总结本文从履带车差速控制原理出发,建立数学模型,并采用数值解算方法进行分析。
通过实际案例分析,验证了数学解算方法在履带车差速控制中的应用价值。
履带底盘的组成介绍及各参数的计算

每条履带都由几十块履带板 组成,如右图8-6所示。
履带板由具有履齿的支承板和两 根导轨组成。
履带销与前一块履带板的后 铰链孔采用压配合,压入力均为 500~750kN。
销和销套之间具有间隙,可使两块履带板自由相对转动。销套同时也是驱动轮驱动 履带运转的节销。
工程机械用的履带一律采用轧制,以利于节省材料,提高质量和批量生产。
半刚性悬架中的履带架(图8-2)是行走系中一个很重要的骨架,支重轮、张紧装置等都 要安装在这个骨架上,它本身的刚度对履带行走系的使用可靠性和寿命有很大影响。
刚度不足,作业时容易变形,引 起四轮(驱动轮、支重轮、导向轮、 托链轮)中心点不在同一垂直面内或 各轴线不能保证平行度和垂直度的要 求等,最终导致跑偏、啃轨或脱轨等 多种使用故障。
在倒档行驶时,履带作用于引导轮的拉力最大,这时,一侧履带引导轮上作用的P力 为倒档时最大牵引力的一半。
5、转向时,地面对于履带机械作用有转向阻力矩Mz,一侧履带的转向阻力矩M为
式中L – 履带接地长度。
M 1 GL
2 4
(二)、履带架的计算
要求:履带架应有足够的强度和刚度,使不易损坏或因变形发生啃轨和脱轨。
表8-1为美国公司装在DH-7G拖拉机上的各种 不同用途的履带板主要参数。
平面式履带板:对于主要不是提供牵引力而是携带负荷运 行的机器,又怕抓土齿将地面破坏时,采用平面式履带板。
特点:这种履带板有时在拖拉机、装载机上采用,但不 能提供足够的牵引力,侧滑的可能性也比较大。
橡胶衬垫式履带板:在建筑物内或铺好的路面上作业履带拖拉机上采用,它在路面上的 牵引力比平面式履带板好,对路面的破坏最小。
Pmax 0.75Gt F 2(B D)
履带计算和发动机的选型
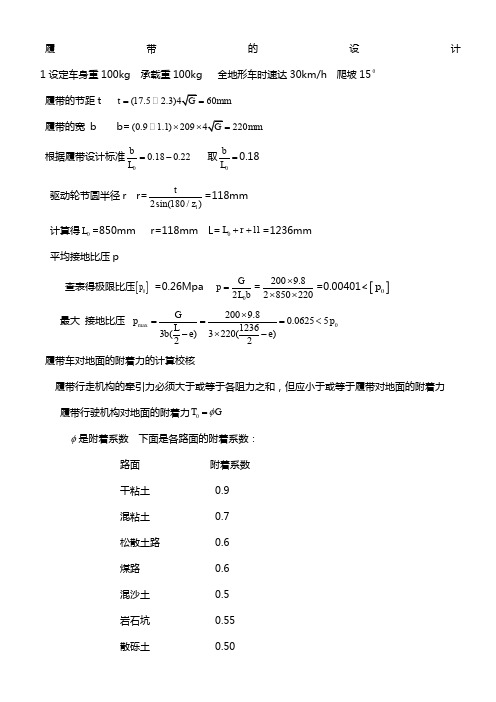
履带的设计 1设定车身重100kg 承载重100kg 全地形车时速达30km/h 爬坡150履带的节距t (17.5 2.3)460t G mm ==履带的宽 bb=(0.9 1.1)209220mm ⨯⨯=根据履带设计标准00.180.22b L =- 取0b L =0.18 驱动轮节圆半径r r=12sin(180/)t z =118mm 计算得0L =850mm r=118mm L=01L r l ++=1236mm平均接地比压p查表得极限比压[]0p =0.26Mpa 02G p L b ==2009.82850220⨯⨯⨯=0.00401<[]0p 最大 接地比压 max 02009.80.0625512363()3220()22G p p L b e e ⨯===<-⨯- 履带车对地面的附着力的计算校核履带行走机构的牵引力必须大于或等于各阻力之和,但应小于或等于履带对地面的附着力 履带行驶机构对地面的附着力0T G φ=φ是附着系数 下面是各路面的附着系数:路面 附着系数干粘土 0.9混粘土 0.7松散土路 0.6煤路 0.6混沙土 0.5岩石坑 0.55散砾土 0.50混凝土 0.45干沙土 0.3雪地 0.25冰地 0.12取最小附着系数的冰地φ=0.12履带下垂量 h 0(0.0150.03)12.7525.5h L mm ==履带的静态张紧力 22018549.859442060L gT N ht ⨯⨯===⨯⨯g 是履带的重量履带行走机构牵引力的计算f T —— 滚动阻力 ; T τ——坡道阻力f 是摩擦系数: 路面 摩擦系数混凝土 0.05冰雪地 0.03-0.04坚实路面 0.07松散土路 0.10泥泞地 沙地 0.1-0.15取最大摩擦系数f=0.1521sin 0.152009.8sin152009.8784f T T T fG G N α=+=+=⨯⨯+⨯= > 0T 计算结果说明冰地用最大的牵引力履带车上坡上不去设路面是雪地 计算0T =490N< 2T 雪地用最大的牵引力爬坡上不去 设路面为干沙土0T =580N< 2T 干沙土用最大的牵引力爬15的坡也上不去 设路面为混凝土0T =882>2T 所以混凝土路面可以用最大的牵引力爬15度的坡这样其他的路面也都能用最大的牵引力爬15度坡我们可以设定路面为附着力最大路面φ=0.9 计算得 最大爬坡为48度 发动机的的确定已知 履带车速度为30km/h,最大牵引力为784N 设总传动比为0.82 P=2T ν/η总P=2T ν/η总=7969w=7.969kw根据算出的最大功率 我选宗申zs157FMJ 发动机下面是此型号发动机的技术参数:宗申宗申zs157FMJ 发动机。
250T履带地基计算书

顶板行走250吨履带吊对混凝土结构影响250吨履带吊车空载为212.4吨,履带接地长度为7.8米,宽度为1.12米,则每条履带下压力为G/LB=212.4×9.8/(2×7.8×1.12)=119.1kPa。
根据设计图纸,顶板考虑的超限荷载为满布20kPa,验算土建结构承载力时,考虑的原则如下:○1吊车荷载产生的内力不大于超限荷载(施工荷载)产生的内力,适用于梁;○2吊车荷载所产的内力远小于结构的极限承载力,适用于板。
顶板厚度基本为500mm,最大单向板块尺寸为4.5m×20.5m,当计算楼板受力时,分为两种工况,履带垂直板跨与平行板跨。
(一)履带垂直板跨(履带横轨向行走)当履带垂直板跨时,履带接地长度为7.8m,板跨为4.5m,最不利情况为两条履带均处于板跨中,考虑到履带中心间距为 6.4m,实际最不利情况为一条履带处于板跨中,如下图所示。
单跨内荷载为11.8kPa,满足设计20kPa超限荷载要求。
吊车横轨向行走示意图(1)楼板承载力验算根据《建筑结构荷载规范》(50009-2012)附录B中相关条文,当荷载作用面的长边垂直于板跨时,简支板上荷载的有效分布宽度b 为(下图所示):①当cy cx b b <,l b cy 2.2≤,l b cx ≤时:l b b cy 73.032+= ②当cy cx b b <,l b cy 2.2>,l b cx ≤时:cy b b =式中l —板的跨度cx b —荷载作用面平行于板跨的计算宽度;cy b —荷载作用面垂直于板跨的计算宽度;而h s b b tx cx ++=2=1120mm ,h s b b ty cy ++=2=8300mm 。
式中tx b —荷载作用面平行于板跨的宽度;ty b —荷载作用面垂直于板跨的宽度;s —垫层的厚度,实际为铺设钢板厚度,计算中暂不考虑;h —板的厚度,为500mm 。
履带车辆设计计算说明书
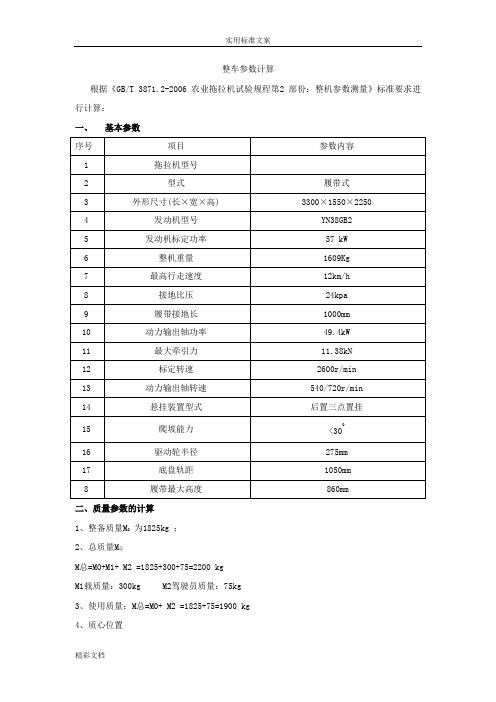
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
履带车辆行走系统设计方案
# 履带车辆行走系统设计方案1. 概述履带车辆是一种能够在恶劣环境或者不平坦地面上行驶的特种车辆,如坦克、斗笠车等。
它们都采用了履带行走系统,具有重载能力高、越野性能强等特点。
履带车辆行走系统的设计方案是履带车辆的核心部分之一。
本文旨在介绍履带车辆行走系统的设计方案。
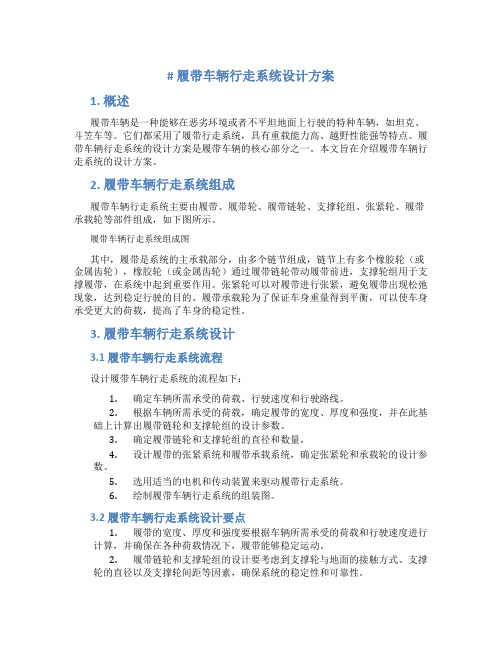
2. 履带车辆行走系统组成履带车辆行走系统主要由履带、履带轮、履带链轮、支撑轮组、张紧轮、履带承载轮等部件组成,如下图所示。
履带车辆行走系统组成图其中,履带是系统的主承载部分,由多个链节组成,链节上有多个橡胶轮(或金属齿轮),橡胶轮(或金属齿轮)通过履带链轮带动履带前进,支撑轮组用于支撑履带,在系统中起到重要作用。
张紧轮可以对履带进行张紧,避免履带出现松弛现象,达到稳定行驶的目的。
履带承载轮为了保证车身重量得到平衡,可以使车身承受更大的荷载,提高了车身的稳定性。
3. 履带车辆行走系统设计3.1 履带车辆行走系统流程设计履带车辆行走系统的流程如下:1.确定车辆所需承受的荷载、行驶速度和行驶路线。
2.根据车辆所需承受的荷载,确定履带的宽度、厚度和强度,并在此基础上计算出履带链轮和支撑轮组的设计参数。
3.确定履带链轮和支撑轮组的直径和数量。
4.设计履带的张紧系统和履带承载系统,确定张紧轮和承载轮的设计参数。
5.选用适当的电机和传动装置来驱动履带行走系统。
6.绘制履带车辆行走系统的组装图。
3.2 履带车辆行走系统设计要点1.履带的宽度、厚度和强度要根据车辆所需承受的荷载和行驶速度进行计算,并确保在各种荷载情况下,履带能够稳定运动。
2.履带链轮和支撑轮组的设计要考虑到支撑轮与地面的接触方式、支撑轮的直径以及支撑轮间距等因素,确保系统的稳定性和可靠性。
3.履带的张紧系统要能够实现履带的松紧调节,并在运动过程中保持张紧力的稳定性,确保履带能够平稳运动。
4.履带承载系统的设计要能够提高车身的稳定性,并能够承受更大的荷载。
5.电机和传动装置要根据车辆的行驶速度和荷载情况进行选型,并要考虑到电机的功率、效率和噪音等因素,确保履带车辆行走系统具有稳定可靠的运行性能。
履带车辆设计计算说明
履带车辆设计计算说明1.动力系统计算:履带车辆的动力系统计算主要包括发动机功率计算、传动系统计算和液压系统计算。
发动机功率计算需要考虑车辆的负载和工作条件,以确定合适的发动机功率。
传动系统计算需要考虑传动效率和传递的扭矩,以确定合适的传动比。
液压系统计算需要考虑液压元件的工作压力和流量,以确定合适的液压功率。
2.结构强度计算:履带车辆的结构强度计算主要包括车架强度计算、履带强度计算和连接件强度计算。
车架强度计算需要考虑车辆的荷载和工作条件,以确定合适的车架截面尺寸和材料。
履带强度计算需要考虑履带的负载和工作条件,以确定合适的履带材料和结构。
连接件强度计算需要考虑连接件的承载能力和工作条件,以确定合适的连接件尺寸和材料。
3.操纵性计算:履带车辆的操纵性计算主要包括转向系统计算和悬挂系统计算。
转向系统计算需要考虑转向角度和转向力矩,以确定合适的转向系统和转向角度。
悬挂系统计算需要考虑悬挂系统的刚度和减震性能,以确定合适的悬挂系统和悬挂参数。
4.稳定性计算:履带车辆的稳定性计算主要包括车辆重心计算、侧倾角计算和抗侧翻稳定性计算。
车辆重心计算需要考虑车辆的负载和工作条件,以确定合适的重心高度和位置。
侧倾角计算需要考虑车辆的悬挂系统和转弯半径,以确定合适的侧倾角限制。
抗侧翻稳定性计算需要考虑车辆的重心高度、侧倾角限制和悬挂系统刚度,以确定合适的抗侧翻稳定性。
以上是对履带车辆设计计算的一般说明,具体的设计计算需要根据实际情况和车辆类型进行具体分析。
设计计算的结果需要进一步验证和调整,以确保车辆的安全性、稳定性和性能表现。
履带底盘的组成介绍及各参数的计算课件
2、履带式机械倒档越过沟渠,其全部重量支承在引导轮
和驱动轮上;
最新 PPT
中南大学 杨忠炯
3、履带式机械倒档越过一突起的障碍物,其全部重量支承 在两边各一个支重轮上,此支重轮是重心附近的支重轮。
计算步骤:由这三种工况计算出各危险断面垂直面内的弯 矩,再考虑在这些位置上同时又在转弯,从而将水平面内 的弯矩叠加进来。在分别计算应力值后,再计算其应力之 和。
Pmax=.0.75Gt
式中 - 附着系数,履带式机械初算时可取 =1; Gt – 推土机总重.
组合式履带由履带板、轨链节、履带销、销套、螺栓 等零件组成。
一般来讲,销子的剪切、销与销套间的挤压、销子的 抗弯强度都不成问题,因为履带的主要破坏形式是磨损。
最新 PPT
中南大学 杨忠炯
右图8-12所 示轨链节11、2-2、33断面处常 出现断裂。
上面所讲的履带板均由几种零件组合而成,通常将这 种由几种零件组合而成的履带称为组合式履带。
组合式履带的优点:链轨节和支承板可以分别用不同的材 料制造,链轨节(履带节)常用易加工的中碳钢或中碳低 合金钢,因而容易将铰链作成封闭式使尘土不易进入,延 长履带的使用寿命。支承板用耐磨的特种合金钢轧制成型, 然后切断而成。此外当履带磨损后,只需根据具体情况单 独更换支承板或链轨节,不必一起更换。换用不同型式的 支承板,还可以使拖拉机进最行新 PP不T 同的作业。 中南大学 杨忠炯
销和销套之间具有间隙,可使两块履带板自由相对转 动。销套同时也是驱动轮驱动履带运转的节销。
工程机械用的履带一律采用轧制,以利于节省材料, 提高质量和批量生产。
图8-6之结构对履带防尘未考虑,这是其不足之处。在 D80A推土机轨链节的凹槽中各放置了一个防尘圈,这样 以来对于防止灰尘砂砾的进入很有效,使履带销和销子 套间的磨损大为减小,如下图8-7所示。
履带拉力计算
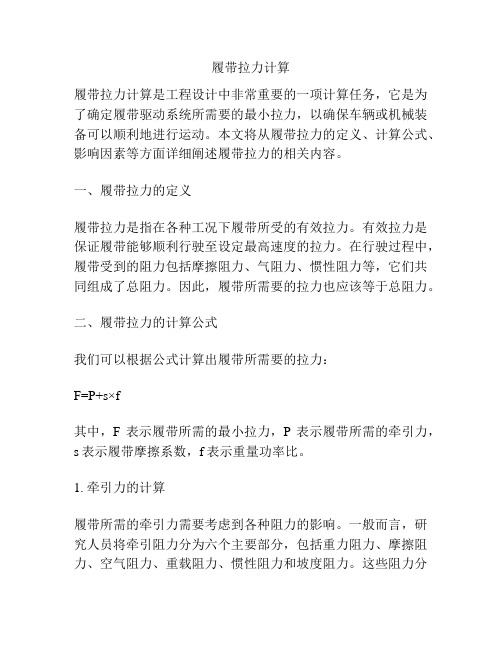
履带拉力计算履带拉力计算是工程设计中非常重要的一项计算任务,它是为了确定履带驱动系统所需要的最小拉力,以确保车辆或机械装备可以顺利地进行运动。
本文将从履带拉力的定义、计算公式、影响因素等方面详细阐述履带拉力的相关内容。
一、履带拉力的定义履带拉力是指在各种工况下履带所受的有效拉力。
有效拉力是保证履带能够顺利行驶至设定最高速度的拉力。
在行驶过程中,履带受到的阻力包括摩擦阻力、气阻力、惯性阻力等,它们共同组成了总阻力。
因此,履带所需要的拉力也应该等于总阻力。
二、履带拉力的计算公式我们可以根据公式计算出履带所需要的拉力:F=P+s×f其中,F表示履带所需的最小拉力,P表示履带所需的牵引力,s表示履带摩擦系数,f表示重量功率比。
1. 牵引力的计算履带所需的牵引力需要考虑到各种阻力的影响。
一般而言,研究人员将牵引阻力分为六个主要部分,包括重力阻力、摩擦阻力、空气阻力、重载阻力、惯性阻力和坡度阻力。
这些阻力分别可以用下面的公式计算。
重力阻力Fg=mg其中,m是履带车辆的质量,g是重力加速度。
摩擦阻力Ff=Rn×cosα×s其中,Rn是法向反力,α是坡度角度,s是履带摩擦系数。
空气阻力Fa=0.0005ρV2A其中,ρ是空气密度,V是车速,A是车辆横截面积。
重载阻力Fn=Fgt×n其中,Fgt是重力阻力,n是摩擦阻力。
惯性阻力Fi=ma其中,m是车辆惯性质量,a是加速度。
坡度阻力Fp=mg×sinα其中,α是坡度角度。
将上述六种阻力加总,即可得到履带所需的牵引阻力。
2. 重量功率比的计算重量功率比是指车辆所需的功率与其重量之比。
对于某个车辆而言,重量功率比越小,则车辆在行驶时所需的牵引力也越小。
计算公式如下:w=P/mv其中,P是车辆所需的功率,m是履带车辆的质量,v是车速。
三、影响履带拉力的因素影响履带拉力的因素非常多,主要包括下面几个方面。
1. 履带摩擦系数履带摩擦系数是指履带和地面间的摩擦系数,履带摩擦系数越小,则所需的拉力就越大。
履带式工程机械液压驱动行走系统设计
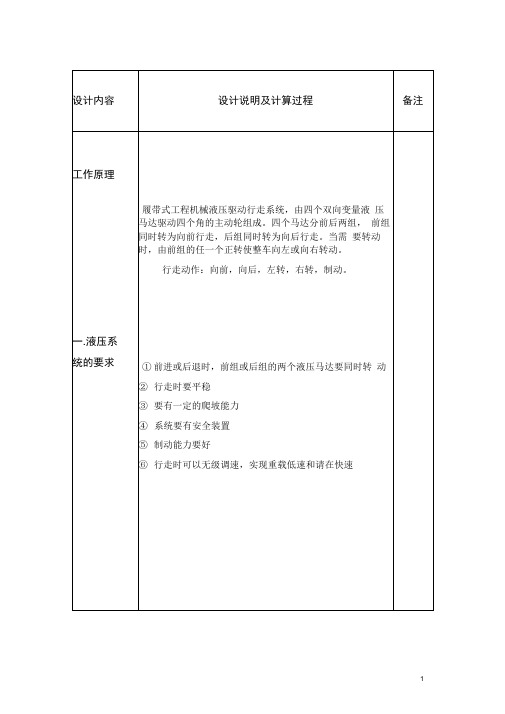
设计内容设计说明及计算过程备注七.系统原理图119r^ri女帖3rW.,rWrtnKi图7-1序号设计说明及名称E计算过程量/(L/s)选用规格1三位四通电磁换向阀3.3634DY-B32HT2三位四通电磁换向阀2.6234DYM-B32HT3三位四通电磁换向阀2.6234DYM-B32HT4三位四通电磁换向阀3.3634DY-B32HT5三位四通电磁换向阀2.6234DYM-B32HT6三位四通电磁换向阀2.6234DYM-B32HT7液控单向阀 3.36AY-Ha32B8液控单向阀 3.36AY-Ha32B 9液控单向阀 3.36AY-Ha32B 10液控单向阀 3.36AY-Ha32B 11节流阀 2.62LF-B32C12节流阀 2.62LF-B32C 13节流阀 2.62LF-B32C 14节流阀 2.62LF-B32C 15溢出阀 2.62YF-B20C表1液压阀明细表⑴液压泵工作压力确定:P P 三P max +E △ P , △ P 为管路损失为1Mpa 则P p =47.4 Mpa ----------------------------------⑵液压泵流量确定:泵的最大供油压力为47.4Mpa,机械计说朋及计算过程 Q=3L/s ,取 k=1.2,贝U C p =kQ=3.6L/s电动机总功率 P=P )?Q D /0.9=189.6KW ⑶液压马达选择选上S2M0.9双斜盘轴向柱塞式液压马达。
其理论 排量是0.873L/r ,额定压力20Mpa,额定转速 8-100r/min,最大转矩3057N?m 机械效率大于90%⑷管路选择表2管路选择设计内压元 件的选择备注实验报告1实验报告2感想液压技术在应用中广泛,许多生活生产机械都离不开液压技术。
通过本次课程设计,我了解到液压设计的基本流程,设计过程比较繁琐,需要注意较多方面,特别是对各元件的压力及流量计算,需要查阅手册和熟练运用公式。
履带车辆设计计算说明
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算1、整备质量M0为1825kg ;2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算: 空载时:质心至后支承点的距离A0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h0=450mm满载时:质心至后支承点的距离A0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7 满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kw m k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(761403600133122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V2=4km/h 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
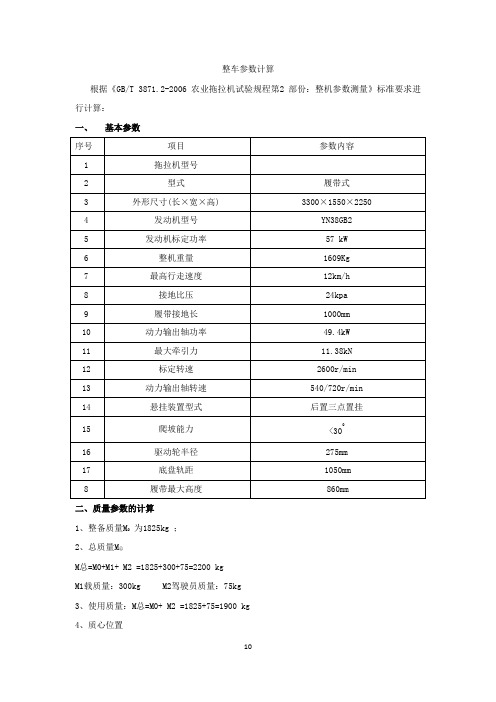
整车参数计算根据《GB/T 3871.2-2006 农业拖拉机试验规程第2 部份:整机参数测量》标准要求进行计算:一、基本参数二、质量参数的计算为1825kg1、整备质量M2、总质量M总M总=M0+M1+ M2 =1825+300+75=2200 kgM1载质量:300kg M2驾驶员质量:75kg3、使用质量:M总=M0+ M2 =1825+75=1900 kg4、质心位置根据《GB/T 3871.15-2006 农业拖拉机试验规程第15部份:质心》标准要求进行计算:空载时:质心至后支承点的距离A 0=830mm质心至前支承点的距离B=610mm 质心至地面的距离h 0=450mm满载时:质心至后支承点的距离A 0=605mm质心至前支承点的距离B=812mm 质心至地面的距离h 0=546mm5、稳定性计算a 、保证拖拉机爬坡时不纵向翻倾的条件是:00h A >δ=0.7 (δ为滑转率)空载时:830/450=1.84>0.7 满载时:605/546=1.11>0.7 满足条件。
b 、保证拖拉机在无横向坡度转弯时,不横向翻倾的条件是:h a2>δ=0.7 a —轨距, a =1200mm h —质心至地面距离mm空载:12002450⨯=1.33>0.7满载:12002546⨯=1.10>0.7故拖拉机在空、满载运行中均能满足稳定性要求。
三、发动机匹配根据《GB/T 1147.1-2007 中小功率内燃机第1 部份:通用技术条件》标准要求进行计算:XJ —782LT 履带式拖拉机配套用昆明云内发动机,型号为:YN38GB2型柴油机,标定功率为57kW/h ,转速为2600r/min.(1)最高设计车速V max =8 km/h ,所需功率:P emax =n1( p f + p w )kwm k V A C v f g m n max d max ⎥⎦⎤⎢⎣⎡⋅⋅+⋅⋅⋅=)()(76140360013 3122009.80.0280.9 1.4 1.1580.9360076140⎡⎤⨯⨯⨯⨯⨯⨯=+⎢⎥⎣⎦()() =6.188kW(2)根据柴油机全负荷速度特性,最大扭矩点的低速档行车速度V 2=4km/h 。
选用V 2=4km/h ,最大爬坡度为25%时,计算所需功率:p emax =n1( p f + p i +p w )kwa3max 1k 3600360076140a d a m g i v C A V m g f v m n ⎡⎤⋅⋅⋅⋅⋅⋅⋅⋅⋅=++⎢⎥⎣⎦)()()3122009.80.02822009.80.2540.9 1.4 1.1540.93600360076140⎡⎤⨯⨯⨯⨯⨯⨯⨯⨯⨯=++⎢⎥⎣⎦()()() =6.948kw上述两式中:P f ——滚动阻力消耗的功率; P w——空气阻力消耗的功率;P i ——坡度阻力消耗的功率; η——传动效率系数,取η =0.9;f ——滚动阻力系数,取f =0.02; C d ——空气阻力系数,取C d =0.9;A——拖拉机前进方向迎风面积A=B×H(宽×高)= 1.40×1.15Va ——拖拉机取低档速度Va=4km/h;imax ——最大爬坡坡度,imax=25%;G——拖拉机总质量,G总 =2200kg。
(注:表示履拖在工作状态)经计算拖拉机组满载时以最高时速行驶所需功率Pe max和低档速度爬25%的坡时,所需功率均小于YN38GB2柴油机的标定功率57kW,并有一定功率储备,故能够满足设计要求。
五、履带式底盘的设计与确定1、履带底盘的说明:底盘是拖拉机的重要部件,它对整个装置起着支撑作用。
所以根据农用履带式拖拉机对整个装置进行较完整的配合与加工等一系列的设计。
履带行走装置有“四轮一带”(驱动轮,支重轮,导向轮,拖带轮或张紧轮,以及履带),张紧装置和行走机构组成。
机械行走时,驱动轮在履带紧边产生一个拉力,力图把履带从支重轮下拉出。
出于支重轮下的履带与地面有足够的附着力,阻止履带的拉出,迫使驱动轮卷绕履带向前滚动,导向轮把履带铺设到地面,从而使机体借支重轮沿履带轨道向前运行。
大功率轮式拖拉机机重一般在5500~8500kg, 接地面积比履带拖拉机小,因此接地压力较大。
经数年耕作后, 在土壤的耕层下面将生成硬底层, 不利于土壤的蓄水保墒和作物的生长。
即使经过深度翻耙, 依然会保持碎小的板结硬块,土壤的显微结构遭到了破坏。
附着性能差, 滑转率高。
橡胶履带拖拉机牵引力大, 适合重负荷作业( 如耕、耙等) , 接地比压小,对农田压实、破坏程度轻, 特别适合在低、湿地作业, 而且除田间作业外, 还在农田基本建设和小型水利工程中用作推土机, 综合利用程度较高。
依据轮式与大功率履带机械的特点,以其以上所叙述的比较分析,综合考虑后得出采用:三角形式的“四轮一带”橡胶履带行走装置。
履带整机参数初步确定以后,应进行计算该履带机械的基本性能是否满足预期要求,整机参数选择是否合理。
这里主要是关于牵引性能的计算。
2、牵引功率计算:根据《GB/T 3871.9-2006 农业拖拉机试验规程第9部份:牵引功率试验》标准要求进行计算:计算工况:计算时所用的工况一般为:在使用重量状态与水平区段的茬地上(对旱地是适耕适度的茬地,对水田是中等泥脚深度的茬地),带牵引负荷(牵引线与地面平行)全油门等速行驶。
(1) 履带式传动的驱动力P q履带传动ηdqe cq m i p r =kgf式中: M e ——发动机转矩kgf ; i ——各档总传动比;n c ——各档总传动效率; r dq ——驱动轮动力半径m ;n q——履带驱动段半径效率,计算时一般去取nq =0.95。
G s max =2L o b q p ; G s max =1.5P TN ; P TN =(1.1-1.2)P T 。
式中:G s max--—最大使用重量;L o——履带接地长度;∑b ——履带板宽度;q p ——一般为0.35~0.5 kgf/cm 2;P TN ——额定牵引力; P T ——牵引力。
根据(2)中的活动阻力P f ,经计算即可得P q)经计算后得结果P q =12.775KN. (2) 履带式传动的活动阻力P fP f =f G skgf式中: G s——使用重量(kgf);f ——履带式一般取0.1。
经计算后得结果P f =1.90KN (3) 行驶速度v理论速度h km i r n v dqe /377.0∑1= 实际速度v =v l (1-δ) km/h式中: n e——发动机转速;r dq——驱动轮动力半径;i Σ——驱动轮轮滑转率(履带式一般取0.07)。
经计算后得结果v =(1.15~6)km/h(4)履带式传动的牵引效率n T 式中:n c ——各档的总传动效率; n f ——滚动效率; n δ——滑转效率;n q ——履带驱动带效率(一般取0.95)。
经计算后得结果nT=0.75(5) 履带机械的附着力PΨδ(要求:附着力应大于或等于履带行走机构的牵引力且大于等于各阻力之和。
)PΨδ =ΨδGΨ式中:Ψδ——一般取0.75;GΨ——取1900KG。
经计算后得结果PΨδ=14.25KN (符合要求)3、转向最大驱动力矩的分析与计算:根据《GB/T 15833-1995 林业轮式和履带式拖拉机试验方法》标准要求进行计算:(1) 履带转向时驱动力说明:履带行走装置在转向时, 需要切断一边履带的动力并对该履带进行制动, 使其静止不动, 靠另一边履带的推动来进行转向, 或者将两条履带同时一前一后运动, 实现原地转向, 但两种转向方式所需最大驱动力一样。
因此以机器单条履带制动左转为例, 见图:图5-2 履带转左向示意图左边的履带处于制动状态,右边履带的推动下,整台机器绕左边履带的中心C1点旋转,产生转向阻力矩Mr,右边履带的行走阻力Fr/2 。
一般情况,履带接地长度L和履带轨距B 的比值L/ B≤1.6。
同时, L/ B 值也直接影响转向阻力的大小,在不影响机器行走的稳定性及接地比压的要求下,应尽量取小值,也就是尽量缩短履带的长度,可以降低行走机构所需驱动力。
(2) 转向驱动力矩的计算转向阻力矩是履带绕其本身转动中心O 1(或O 2)作相对转动时,地面对履带产生的阻力矩,如图所示,O 1、O 2 分别为两条履带的瞬时转向中心。
为便于计算转向阻力矩M r 的数值,作如下两点假设:(1)机体质量平均分配在两条履带上,且单位履带长度上的负荷为: Lm q 2=式中:M-总质量(kg ); L-履带接地长度(m)。
经过计算:1900593.75(/)22 1.6G q kg m L ===⨯ 形成转向阻力矩M u 的反力都是横向力且是均匀分布的。
履带拖拉机牵引负荷在转向时存在横向分力,在横向分力的影响下,车辆的转向轴线将由原来通 过履带接地几何中心移至O 1O 2 ,移动距离为x 0。
图5-3 履带转向受力图根据上述假设,转向时地面对履带支承段的反作用力的分布为矩形分布。
在履带支承面上任何一点到转动中心的距离为x , 则微小单元长度为dx ,分配在其上的车体重力为qdx ,总转向阻力矩可按下式:⎪⎪⎭⎫ ⎝⎛+=⎰⎰-+x x Lx x L u uqxd uqxd M 0000222 式中:U-转向阻力系数。
45.015.085.0max=+=BRu u式中: -车辆作急转弯时转弯的转向阻力系数; B —履带轨距。
)将式⎪⎪⎭⎫ ⎝⎛+=⎰⎰-+x x Lx x L u uqxd uqxd M 0000222代入上式积分得并简化得:4uGL M u = 即:0.451900 1.6342.44u uGL M N m ⨯⨯=== (3)转向驱动力矩(假设机器重心与履带行走装置几何中心相重合)把转向半径2≥B R 和0 2≤B R分别考虑。
1)当转向半径2≥BR 如下图所示,两侧履带都向前运动,此时两侧履带受地面摩擦阻力朝同一方向(即行驶的反方向),外侧、内侧履带受力分别为:图5-4 右转向示意图2)当转向半径0 ≤2≤BR 如下图所示,此时两侧履带受地面摩擦阻力朝反 方向,外侧、内侧履带受力分别为:maxu ≤图5-5 左转向示意图式中: F f 1,F f 1-分别为内侧前进阻力和驱动力;F q1,F q 2-分别为外侧前进阻力和驱动力。
考虑机体的重心在中心位置,所以履带的前进阻力 为:F f 1=F f 2=G 21f式中:f — 履带滚动阻力系数(即F f 1=F f 2=21Gf =1460 N )转向时的最大驱动力矩为:M max=maxr F F q2q1⨯}{, 式中:r —驱动轮节圆直径。