自动控制测试题附答案
自动控制原理基本知识测试 题

C.无阻尼自然振荡频率越大,系统的峰值时间不变
D.无阻尼自然振荡频率越大,系统的峰值时间不定
13.对于欠阻尼的二阶系统,当阻尼比保持不变时,( B )。
A.无阻尼自然振荡频率越大,系统的峰值时间越大
B.无阻尼自然振荡频率越大,系统的峰值时间越小
C.无阻尼自然振荡频率越大,系统的峰值时间不变
D.无阻尼自然振荡频率越大,系统的峰值时间不定
6.典型的微分环节的传递函数为( D )
A. B. C. D.
7.典型的一阶惯性环节的传递函数为( C )
A. B.
C.
D.
8.典型的二阶振荡环节的传递函数为( A )
A. 为( B )
A. B. C. D.1
10.以下关于系统结构图的描述,错误的是( B )
A.结构图是线性定常系统数学模型的一种图示法
第一章 自动控制的一般概念
一、填空题
1.( 稳定性 )、(快速性 )和( 快速性 )是对自动控制系统性能
的基本要求。
2.线性控制系统的特点是可以使用( 叠加 )原理,而非线性控制系统
则不能。
3.根据系统给定值信号特点,控制系统可分为( 定值 )控制系统、(
随动 )控制系统和( 程序 )控制系统。
4.自动控制的基本方式有( 开环 )控制、( 闭环 )控制和( 复合
2.下列系统属于闭环控制系统的为( D )。
A.自动流水线
B.传统交通红绿灯控制 C.普通车床 D.家用
电冰箱
3.下列系统属于定值控制系统的为( C )。
A.自动化流水线 B.自动跟踪雷达
C.家用电冰箱 D.家用
微波炉
4.下列系统属于随动控制系统的为( B )。
A.自动化流水线 B.火炮自动跟踪系统
PLC测试题1(西门子PLC试题)答案

PLC测试题1(西门子PLC试题)答案PLC测试题1(西门子PLC试题)核心提示:1、写出下面梯形图程序对应的语句表指令... 1、写出下面梯形图程序对应的语句表指令。
2、根据下列语句表程序,写出梯形图程序。
3、使用置位复位指令,编写两台电动机控制程序。
(a)启动时,电动机M1先启动,然后才能启动电动机M2,M1、M2同时停核心提示:1、写出下面梯形图程序对应的语句表指令...1、写出下面梯形图程序对应的语句表指令。
2、根据下列语句表程序,写出梯形图程序。
3、使用置位复位指令,编写两台电动机控制程序。
(a) 启动时,电动机M1先启动,然后才能启动电动机M2,M1、M2同时停止。
(b) 启动时,电动机M1、M2同时启动,停止时,电动机M2停止后,M1才能停止。
4、设计周期为5S,占空比为20%的方波输出信号程序(输出点可以使用Q0.0)。
解:设启动信号为I0.0,输出点Q0.0,梯形图程序如下:5、编写一段输出控制程序,假设有8个指示灯,从左到右以0.5S 速度依次点亮,循环显示。
每按动1次按钮,循环1次或20次。
循环20次,网络1的M0.2改成M0.3。
另外接续网络6和7。
6、现有三条运输皮带,每条皮带都由一台电动机拖动。
按下启动按钮以后,3号运输皮带开始运行。
5S以后,2号运输皮带自动启动,再过5S以后,1号运输皮带自动启动。
停机的顺序与启动的顺序正好相反,间隔时间仍为5S。
试设计出该系统的PLC接线图以及相应的梯形图程序。
解:接线图略使用置位复位指令的梯形图程序如下:7、现有三条运输皮带,每条皮带都由一台电动机拖动。
按下启动按钮以后,3号运输皮带开始运行。
5S以后,2号运输皮带自动启动,再过5S以后,1号运输皮带自动启动。
停机的顺序与启动的顺序正好相反,间隔时间仍为5S。
试设计出该系统的PLC接线图以及相应的梯形图程序。
解:接线图略梯形图程序如下:8、某自动生产线上,使用有轨小车来运转工序之间的物件,小车的驱动采用电动机拖动,其行驶示意图如图所示。
大学自动化试题答案

大学自动化试题答案一、选择题1. 自动化控制系统的基本组成元素包括()。
A. 传感器B. 执行器C. 控制器D. 所有以上答案:D2. 在自动化控制系统中,开环控制与闭环控制的主要区别在于()。
A. 控制精度B. 系统复杂度C. 是否有反馈环节D. 响应速度答案:C3. 以下哪种控制算法是基于误差信号进行控制的?()A. 开环控制B. 闭环控制C. 串级控制D. 自适应控制答案:B4. 在自动化领域中,PID控制器的作用是()。
A. 比例-积分-微分B. 比例-积分C. 微分-积分D. 比例-微分答案:A5. 机器人自动化技术中,用于确定机器人末端执行器位置的传感器是()。
A. 位移传感器B. 力传感器C. 速度传感器D. 加速度传感器答案:A二、填空题1. 自动化控制系统的设计目标之一是达到________,即系统对于期望输出的快速且准确的响应。
答案:快速性2. 在自动化控制系统中,________是指系统对于外部干扰的抵抗能力和保持输出稳定的能力。
答案:鲁棒性3. 闭环控制系统中,反馈环节的作用是提供________信息,以便控制器进行相应的调整。
答案:误差4. 在自动化控制系统中,________是指系统输出对于输入的变化的响应程度。
答案:灵敏度5. 机器人自动化技术中,________是指机器人在执行任务时的灵活性和多样性。
答案:灵活性三、简答题1. 请简述自动化控制系统的基本工作原理。
答:自动化控制系统的基本工作原理是通过传感器收集被控制对象的状态信息,如温度、压力、速度等,这些信息被送入控制器进行处理。
控制器根据预设的控制算法和目标值计算出控制信号,再通过执行器对被控制对象进行调节,以达到期望的输出。
闭环控制系统还会将输出结果通过反馈环节返回给控制器,形成闭环,以便进行误差校正和系统优化。
2. 阐述PID控制器中比例(P)、积分(I)和微分(D)的作用。
答:比例(P)控制器的作用是根据当前误差的大小来调整控制信号,误差越大,控制作用越强。
控制工程基础复习题库(有答案)
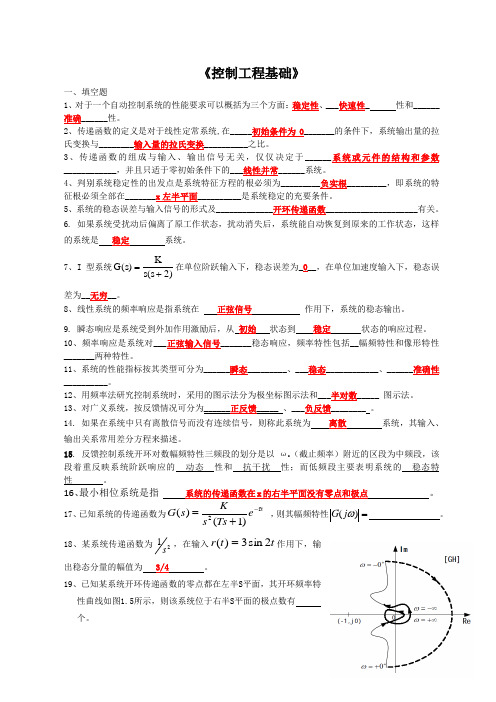
系统的传递函数在x的右半平面没有零点和极点
6.如何确定复平面上根轨迹的分离点?
需要解分离点方程;
需要确定分离角;
分离角与分支数有关
7.什么是系统的偏差信号?
输入信号与反馈信号之差
8.什么是传递函数?
9.解释根轨迹和常规根轨迹的含义。
10.根轨迹各分支的起点和终点在哪?
根轨迹关于实轴对称,分支数等于开环极点数,起点位系统的开环极点,终点为系统的开环零点、无穷远点
5、系统的稳态误差与输入信号的形式及_____________开环传递函数_____________________有关。
6. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是稳定系统。
7、I型系统 在单位阶跃输入下,稳态误差为_0__,在单位加速度输入下,稳态误差为__无穷__。
8、线性系统的频率响应是指系统在正弦信号作用下,系统的稳态输出。
9. 瞬态响应是系统受到外加作用激励后,从初始状态到稳定状态的响应过程。
10、频率响应是系统对___正弦输入信号_______稳态响应,频率特性包括__幅频特性和像形特性_______两种特性。
11、系统的性能指标按其类型可分为______瞬态_________、___稳态____________、______准确性__________。
A. 开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用。
B. 开环系统的输入对系统无控制作用,闭环系统的输入对系统有控制作用。
C. 开环系统不一定有反馈回路,闭环系统有反馈回路。
D. 开环系统不一定有反馈回路,闭环系统也不一定有反馈回路。
13.某典型环节的传递函数为 ,则该环节为( )。
plc考试真题及答案

plc考试真题及答案PLC考试真题及答案一、单项选择题(每题2分,共20分)1. PLC的全称是()。
A. 可编程逻辑控制器B. 可编程逻辑计算机C. 可编程逻辑设备D. 可编程逻辑系统答案:A2. PLC中,用于存储程序的存储器是()。
A. RAMB. EPROMC. ROMD. EEPROM答案:C3. 下列哪个不是PLC的输入设备?()A. 按钮B. 传感器C. 显示器D. 继电器答案:C4. PLC的扫描周期主要受以下哪个因素的影响?()A. 程序复杂度B. 存储器大小C. CPU速度D. 电源电压答案:A5. PLC的输出设备通常连接到()。
A. 传感器B. 显示器C. 控制器D. 执行器答案:D6. PLC中,用于实现顺序控制的编程方法是()。
A. 梯形图B. 功能块图C. 顺序功能图D. 指令列表答案:C7. PLC的通信接口不包括以下哪个?()A. RS-232B. RS-485C. USBD. HDMI答案:D8. PLC的编程语言不包括以下哪个?()A. 梯形图B. 功能块图C. 指令列表D. 汇编语言答案:D9. PLC的电源模块通常提供()。
A. 直流电源B. 交流电源C. 脉冲电源D. 变频电源答案:A10. PLC的扩展模块不包括以下哪个?()A. 输入/输出模块B. 通信模块C. 电源模块D. 显示模块答案:D二、多项选择题(每题3分,共15分)11. PLC的主要应用领域包括()。
A. 工业自动化B. 楼宇自动化C. 交通控制D. 医疗设备答案:ABCD12. PLC的输入设备可以包括()。
A. 按钮B. 传感器C. 继电器D. 编码器答案:ABCD13. PLC的输出设备可以包括()。
A. 接触器B. 指示灯C. 电机D. 电磁阀答案:ABCD14. PLC的编程语言包括()。
A. 梯形图B. 功能块图C. 顺序功能图D. 结构化文本答案:ABCD15. PLC的通信协议可以包括()。
自动化考试试题(含答案)
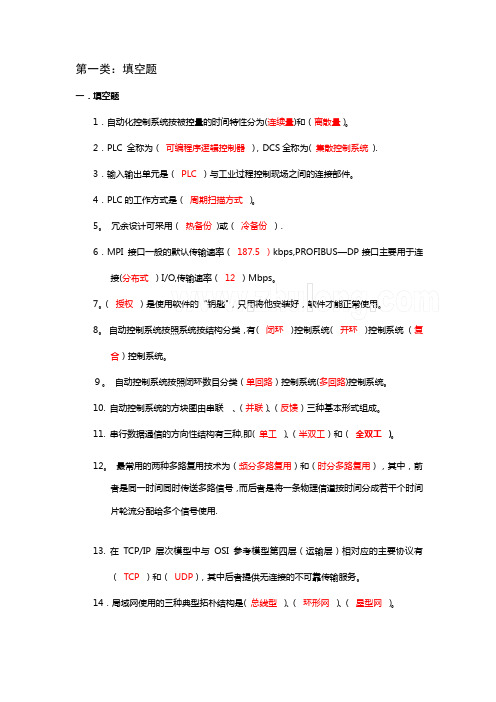
第一类:填空题一.填空题1.自动化控制系统按被控量的时间特性分为(连续量)和(离散量)。
2.PLC 全称为(可编程序逻辑控制器),DCS全称为( 集散控制系统).3.输入输出单元是(PLC)与工业过程控制现场之间的连接部件。
4.PLC的工作方式是(周期扫描方式)。
5。
冗余设计可采用(热备份)或(冷备份).6.MPI 接口一般的默认传输速率(187.5 )kbps,PROFIBUS—DP接口主要用于连接(分布式)I/O,传输速率(12)Mbps。
7。
(授权)是使用软件的“钥匙",只用将他安装好,软件才能正常使用。
8。
自动控制系统按照系统按结构分类,有(闭环)控制系统(开环)控制系统(复合)控制系统。
9。
自动控制系统按照闭环数目分类(单回路)控制系统(多回路)控制系统。
10. 自动控制系统的方块图由串联、(并联)、(反馈)三种基本形式组成。
11. 串行数据通信的方向性结构有三种,即( 单工)、(半双工)和(全双工)。
12。
最常用的两种多路复用技术为(频分多路复用)和(时分多路复用),其中,前者是同一时间同时传送多路信号,而后者是将一条物理信道按时间分成若干个时间片轮流分配给多个信号使用.13. 在TCP/IP层次模型中与OSI参考模型第四层(运输层)相对应的主要协议有(TCP)和(UDP ),其中后者提供无连接的不可靠传输服务。
14.局域网使用的三种典型拓朴结构是( 总线型)、(环形网)、(星型网)。
15.开放系统互连参考模型OSI中,共分七个层次,其中最下面的三个层次从下到上分别是(物理层)、(数据链路层)、(网络层)。
16、每台PLC至少有一个( CPU ),它按PLC的系统程序赋予的功能接收并存贮用户程序和数据,用扫描的方式采集由现场输入装置送来的状态或数据,并存入规定的寄存器中.17、PLC的对外功能,主要是通过各种(I/O接口模块)与外界联系的。
18、PLC具有通信联网的功能,它使(PLC与PLC)之间、PLC与上位计算机以及其他智能设备之间能够交换信息,形成一个统一的整体,实现分散集中控制。
最新郑大《自动控制原理》在线测试
郑大《自动控制原理》在线测试《自动控制原理》第01章在线测试剩余时间:46:37答题须知:1、本卷满分20分。
2、答完题后,请一定要单击下面的“交卷”按钮交卷,否则无法记录本试卷的成绩。
3、在交卷之前,不要刷新本网页,否则你的答题结果将会被清空。
第一题、单项选择题(每题1分,5道题共5分)1、线性系统和非线性系统的根本区别在于A、线性系统有外加输入,非线性系统无外加输入。
B、线性系统无外加输入,非线性系统有外加输入。
C、线性系统满足迭加原理,非线性系统不满足迭加原理。
D、线性系统不满足迭加原理,非线性系统满足迭加原理。
2、令线性定常系统传递函数的分母多项式为零,则可得到系统的A、代数方程B、特征方程C、差分方程D、状态方程3、根据输入量变化的规律分类,控制系统可分为A、恒值控制系统、随动控制系统和程序控制系统B、反馈控制系统、前馈控制系统前馈—反馈复合控制系统C、最优控制系统和模糊控制系统D、连续控制系统和离散控制系统4、A、B、C、D、5、下列系统中属于开环控制的为A、自动跟踪雷达B、无人驾驶车C、普通车床D、家用空调器第二题、多项选择题(每题2分,5道题共10分)1、下列系统不属于程序控制系统的为A、家用空调器B、传统交通红绿灯控制C、普通车床D、火炮自动跟踪系统2、下列系统不属于随动控制系统的为A、家用空调器B、家用电冰箱C、自动化流水线D、火炮自动跟踪系统3、下列是自动控制系统基本方式的是A、开环控制B、闭环控制C、前馈控制D、复合控制4、下列属于自动控制系统的基本组成环节的是A、被控对象B、被控变量C、控制器D、测量变送5、自动控制系统过渡过程有A、单调过程B、衰减振荡过程C、等幅振荡过程D、发散振荡过程第三题、判断题(每题1分,5道题共5分)1、自动控制系统不稳定的过渡过程是发散振荡过程正确错误2、家用电冰箱属于闭环控制系统正确错误3、火炮自动跟踪系统属于随动控制系统正确错误4、离散控制系统为按照系统给定值信号特点定义的控制系统正确错误5、被控对象是自动控制系统的基本组成环节正确错误《自动控制原理》第02章在线测试剩余时间:46:54答题须知:1、本卷满分20分。
自动化考试试题(杨敏)
凯添集团自动化试题一.单项选择题1、时间顺序控制系统是 ( 程)序的控制系统.A . 逻辑先后B . 指令条件C . 时间控制D . 以上均否参考答案: C2、普通对于 PLC 而言,冗余系统的范围主要是 CPU 、存贮单元、 ( )、通信系统。
A . 输入单元B . 电源系统C . 输出单元D . 功能单元参考答案: B3、( )包含丰富的指令,采用文本编程方式A . LADB . STLC . FBDD . 以上均否参考答案: B4、下面不属于基本逻辑运算的是 ( )A . 与B . 或者C . 非D . 真参考答案: D5、PLC 在使用过程中应考虑的三个使用指标中不包含( )A . 工作环境B . 电源要求C . 抗干扰D . 可扩展性参考答案: D6、下面那一项是热电阻的分度号( )A、JB、KC、BD、PT-100参考答案: D7、在图示梯形图线圈 G 的 4 条励磁路径中,哪一条是不可行的? ( )AEFA. A->B->CB. A->D->EC. F->ED. F->D->B->C参考答案: D8、模/数转换器的转换过程分为采样、量化和编码,其中( )过程最重要。
A. 采样和编码B. 采样C. 编码D. 量化参考答案: C9、三极管放大电路中三极管工作在( )区。
A .饱和B. 放大C. 截止D. 任意参考答案: B10、铂电阻分度号为 Pt100,测温范围为( )A . 0℃~1600℃B . 0℃~800℃C .-200℃~800℃D. 0℃~300℃参考答案: C11、在自动调节系统中比例调节的结果往往会产生( )A .误差B .偏差C .动差 GC B DD.静差参考答案: D12.、外部存储器堆栈的存取规则是( )。
A. 先进先出B. 同进同出C. 快进先出D. 后进先出参考答案: D13、机电超载运行易造成机电( )。
A.外壳带电B.运行不稳C.温度升高D.功率下降参考答案: C14、热电偶温度计是基于( )的原理来测温的。
电气控制与PLC习题、测试题及答案

电气与PLC控制习题、测试题及答案1.接触器的线圈额定电流和额定电压与接触器的额定电流和接触器的额定电压有何区别?答:线圈的额定电压标注在线包上,与是控制回路的电压一致,其额定电流为额定电压下流过线圈的电流,而额定电压标注在铭牌上,与主回路的电压一致,其额定电流大于主回路电流。
2.在什么情况下中间继电器可以取代接触器启动电动机?答:在控制小功率、轻负载电动机的电路中3.电动机的启动电流很大,当电动机启动时,热继电器会不会动作?为什么?答:正常情况下不会动作,因为电动机启动的时间比较短,其电流产生的热效应不足以使热继电器动作。
4.空气式时间继电器如何调节延时时间?JST型时间继电器触头有哪几类?画出他们的图形符号。
答:用螺丝刀调节进气孔气隙大小其触头有如下类型5.熔断器为什么一般不用作过载保护?答:熔断器主要用于短路保护和严重过载保护,只有当线路电流达到熔断器熔断短路一定的时间后,熔断器才熔断,而一般的过载电流远远小于熔断电流,熔断器不会熔断,不能起到过载保护的作用。
4.试设计可进行两处操作,对一台电动机实现长动和点动的控制电路。
SB3、SB5点动;SB1、SB4长动一处为SB3点动、SB1长动、SB2停止SB2、SB6停止一处为SB5点动、SB4长动、SB6停止5.试设计两台笼型电动机M1、M2的顺序起动/停止的控制电路,要求如下:①M1、M2能循序启动,并能同时或分别停止。
②M1启动后M2启动,M1可点动,M2单独停止。
①②SB1、KM1、M1 启动,SB2、KM2、M2启动。
SB3停M1,SB4停M2 ,SB5总停5.设计一个控制电路,要求第一台电动机启动10S后,第二台电动机自行起动,运行10s后,第一台电动机停止运行并同时使第三台电动机自行起动,再运行15s后,电动机全部停止运行。
7.画出笼型异步电动机的能耗制动控制电路,要求如下。
①用按钮SB2和SB1控制电动机M的起停②按下停止按钮SB1时,应使接触器KM1断电释放,接触器KM2通电运行,进行能耗制动。
电气自动化模拟考试题(附答案)

电气自动化模拟考试题(附答案)一、单选题(共47题,每题1分,共47分)1.对于三相鼠笼式异步电动机的多地控制,须将多个起动按钮并联,多个停止按钮(),才能达到要求。
A、串联B、并联C、混联D、自锁正确答案:A2.功率最大的器件是()。
A、MOSFETB、IGBTC、SCRD、电力三极管正确答案:D3.晶体管的集电极与发射极之间的正反向阻值都应大于(),如果两个方向的阻值都很小,则可能是击穿了A、2KΩB、1.5KΩC、0.5KΩD、1KΩ正确答案:A4.交流三相异步电动机Z=24,m=32,P=4,则每极每相的槽数为()。
A、6槽B、8槽C、2槽D、4槽正确答案:C5.在NPN型晶体三极管放大电路中,如将其基极与发射极短路,三极管所处的状态是()。
A、截止B、饱和C、无法判定D、放大正确答案:A6.电磁抱闸断电制动控制线路,当电磁抱闸线圈()时,电动机迅速停转。
A、失电B、得电C、短路D、电流很大正确答案:A7.保护接地的主要作用是()和减少流经人身的电流。
A、减少接地电流B、防止人身触电C、短路保护D、降低接地电压正确答案:D8.利用试验法测得变压器高低压侧的相电阻之差与三相电阻平均值之比超过4%,则可能的故障是()。
A、引线铜皮与瓷瓶导管断开B、匝间短路C、分接开关损坏D、高压绕组断路正确答案:B9.判断磁场对通电导体作用力的方向,用()。
A、左手定则B、楞次定律C、安培定则D、右手定则正确答案:A10.过电流继电器主要用于()的场合,作为电动机或主电路的过载和短路保护。
A、频繁起动和重载起动B、不频繁起动和重载起动C、频繁起动和轻载起动D、轻载起动和不频繁起动正确答案:A11.磁通的单位是()。
A、A/mB、BmC、WbD、T正确答案:C12.对于电击而言,工频电流与高频电流比较,其危险性是()。
A、工频危险性大B、二者危险性一样大C、高频危险性大D、二者不能比较正确答案:A13.电压互感器工作时,其高压绕组与被测电路并联,低压绕组与测量仪表的电压线圈()。
电气自动化测试题(含参考答案)

电气自动化测试题(含参考答案)一、单选题(共47题,每题1分,共47分)1.支架上水平敷设电缆每隔()进行固定,电缆首末两端及转弯处、电缆接头处必须固定。
A、1-2mB、2-5mC、5-10mD、10-15m正确答案:C2.对免维护蓄电池现场进行电池容量校核工作,以0.1C10的恒定放电电流进行放电,放电的容量不得低于()放电容量的95%。
A、6hB、8hC、10hD、12h正确答案:C3.在交流电路中()平均值。
A、电流才有B、电压、电动势、电流都有C、电压才有D、电动势才有正确答案:B4.电流互感器的额定二次电流一般为( )A。
A、5B、10C、15正确答案:A5.在自动控制系统中,给定值随时间而不断变化,并且预先不能确定它的变化规律,这种系统成为()控制系统。
A、随动B、定值C、复合D、程序正确答案:A6.数字式触发电路中如UK=O时,脉冲频率f=13kHz,UK=10V时,f=() kHz。
A、130B、1300C、1.3D、13正确答案:A7.三相异步电动机采用能耗制动时,当切断电源后,将()。
A、定子绕组送入直流电B、转子回路串入电阻C、转子绕组进行反接D、定子任意两相绕组进行反接正确答案:A8.防火墙两侧长度不小于()内的电缆应涂刷防火涂料或缠绕防火包带。
A、2.5mB、2mC、1mD、5m正确答案:B9.GW4-35/2000隔离开关分、合闸时,其两个闸刀的运动方式为()。
A、垂直旋转式B、水平转动式C、插入式正确答案:A10.CPU通过总线来完成数控处理和实时控制任务。
()存放着CNC系统程序,其他程序或数据存放在RAM内,并由后备电池来保存。
A、CPUB、RAMC、ROMD、EPROM正确答案:D11.( )测量前应清理干净,并将两量爪合并,检查游标卡尺的精度情况。
A、千分尺B、卷尺C、游标卡尺D、钢直尺正确答案:C12.外部存储器堆栈的存取规则是()A、后进先出B、快进先出C、同进同出D、先进先出正确答案:A13.当Rˊ=Ri时,电路阻抗匹配,振荡器的工作状态叫做()。
大连理工1999-2005研究生考试自动控制原理真题

大连理工大学二O O 五年硕士生入学考试《自动控制原理(含20%现代)》试题一、(15分)试求图1所示电路的传递函数U c (s) / U r (s) 。
二、(20分)给定系统结构如图2所示。
1.设r(t)=n 1(t)=n 2(t)=1(t), 试求系统的稳态误差e ss ;2.在r(t)=n 1(t)=n 2(t)=1(t)情况下,如何使稳态误差e ss =0。
三、(25分)已知负反馈系统的开环传递函数为1.试绘制以K 为参量的根轨迹图;2.试求系统处于临界稳定状态时的闭环极点。
四、(15分)已知负反馈系统的开环传递函数为G(s)H(s)=)1)(5()1(10-++s s s ,试绘制开环幅相特性曲线,并应用奈奎斯特判据判断系统的稳定性。
五、(15分)已知负反馈系统的开环传递函数为G(s)H(s)=)50)(5(2500++s s s ,并绘制开环频率特性对数坐标曲线,并计算相角裕度。
六、(15分)给定系统微分方程为,试确定奇点位置及类型,并绘制相平面草图。
七、(15分)设系统结构如图3所示。
试求C(z),并判断K=1时系统的稳定性。
八、(10分)已知离散系统的状态方程为a>0,试用李雅普诺夫第二方法确定使平衡点渐进稳定的a取值范围。
九、(20分)给定系统结构如图4所示。
1.试建立系统的状态空间描述;2.试设计状态反馈阵,使系统闭环极点位于-2,-2处;3.K是否可以取为0.5,为什么?大连理工大学二O O 四年硕士生入学考试《自动控制原理(含30%现代)》试题一、(15分)试求图1所示电路的结构图和传递函数。
二、(10分)已知系统的特征方程为: s 4+2.5s 3+2.5s 2+10s -6 = 0 试求特征根在S 平面上的分布。
三、(10分)试求系统的单位脉冲响应。
四、(20分)设系统的开环传递函数为:1. 试绘制根轨迹图(可能的分离点为:-1.2、-1.6、-2.6、-2.9、-3.5);2. 试求出分离点处的K 值。
【电气控制与PLC】习题、测试题及答案
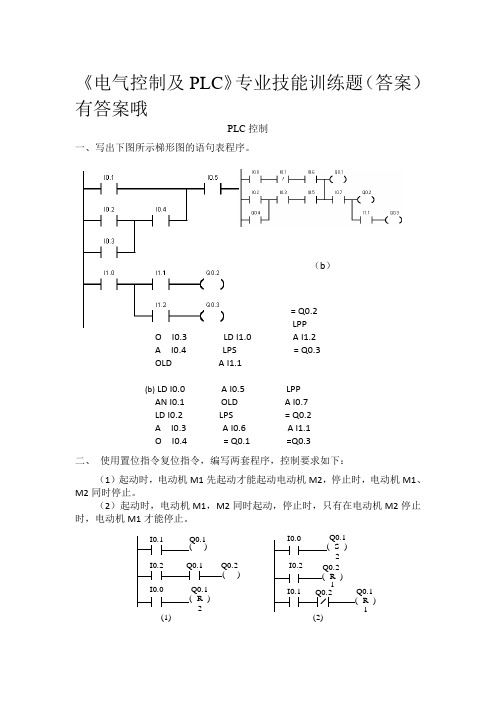
《电气控制及PLC 》专业技能训练题(答案) 有答案哦PLC 控制一、写出下图所示梯形图的语句表程序。
(b )(a) LD I0.1 A I0.5 = Q0.2LD I0.2 = Q0.1 LPP O I0.3 LD I1.0 A I1.2 A I0.4 LPS = Q0.3 OLD A I1.1(b) LD I0.0 A I0.5 LPPAN I0.1 OLD A I0.7 LD I0.2 LPS = Q0.2 A I0.3 A I0.6 A I1.1 O I0.4 = Q0.1 =Q0.3二、 使用置位指令复位指令,编写两套程序,控制要求如下:(1)起动时,电动机M1先起动才能起动电动机M2,停止时,电动机M1、M2同时停止。
(2)起动时,电动机M1,M2同时起动,停止时,只有在电动机M2停止时,电动机M1才能停止。
I0.1( )Q0.1I0.2Q0.1( )Q0.2I0.0Q0.12( R )I0.0Q0.12( S )I0.2Q0.2( R )1I0.1Q0.2( R )Q0.11(1)(2)三、 画出Q0.0的波形图。
(程序实现二分频)I0.0Q0.0四、设计满足下图所示时序图的梯形图。
( )( )I0.0T37Q0.0Q0.0Q0.0T37IN PT TONT37I0.1Q0.1Q0.140( )Q0.0I0.0Q0.0Q0.1( )Q0.1I0.1Q0.1T37题5—2T37IN TON PT70Q0.1I0.1五、 按钮I0.0按下后,Q0.0变为1状态并自保持,I0.1输入3个脉冲后,(用I0.0 .I0.0 .I0.1.Q0.0.Q0.17s.I0.1.Q0.0 .Q0.1.I0.04sC1计数),T37开始定时,5S 后,Q0.0变为0状态,同时C1被复位,在可编程控制器刚开始执行用户程序时,C1也被复位,设计出梯形图。
( )I0.0T37Q0.0Q0.0I0.1SM0.1Q0.0C1C1T37六、使用顺序控制结构,编写出实现红、绿信号灯循环显示程序(要求循环间隔时间为2S),并画出该程序设计的功能流程图。
电气自动化测试题及答案

电气自动化测试题及答案一、选择题(每题2分,共20分)1. 以下哪个不属于电气自动化的基本组成要素?A. 传感器B. 执行器C. 控制器D. 电源答案:D2. 以下哪种传感器属于模拟传感器?A. 温度传感器B. 压力传感器C. 光电传感器D. 旋转编码器答案:A3. PLC(可编程逻辑控制器)的主要特点是?A. 可编程B. 可靠性高C. 成本低D. 所有以上选项答案:D4. 以下哪种编程语言不是PLC的常用编程语言?A. 梯形图B. 功能块图C. 语句表D. Python答案:D5. 以下哪种执行器不属于气动执行器?A. 气缸B. 气动调节阀C. 电动执行器D. 气动蝶阀答案:C6. 在电气自动化系统中,以下哪个环节用于实现信号的转换与放大?A. 传感器B. 执行器C. 放大器D. 控制器答案:C7. 以下哪种现场总线技术不属于工业自动化领域的主流技术?A. ProfibusB. CANC. ModbusD. USB答案:D8. 以下哪种设备不属于工业机器人?A. 机械手B. 自动导引车C. 数控机床D. 搬运机器人答案:C9. 以下哪个不属于电气自动化的应用领域?A. 制造业B. 交通C. 医疗D. 农业生产答案:C10. 在电气自动化系统中,以下哪个环节用于实现信息的传输与处理?A. 传感器B. 控制器C. 执行器D. 通信网络答案:D二、填空题(每题2分,共20分)1. PLC的缩写是______。
答案:可编程逻辑控制器2. 电气自动化系统中的传感器主要用于______。
答案:检测和转换信号3. 工业现场总线技术主要包括______、______和______等。
答案:Profibus、CAN、Modbus4. 电气自动化系统中的执行器主要用于______。
答案:驱动和控制对象5. 电气自动化系统中的控制器主要用于______。
答案:实现控制策略和算法6. 电气自动化系统中的通信网络主要用于______。
电气自动化与智能控制测试 选择题 64题

1. 在电气自动化系统中,PLC代表什么?A. Programmable Logic ControllerB. Programmable Load ControllerC. Power Line CommunicationD. Process Logic Control2. 下列哪种传感器通常用于检测温度?A. 光电传感器B. 热电偶C. 压力传感器D. 超声波传感器3. 在智能控制系统中,PID控制器中的“P”代表什么?A. ProportionalB. PowerC. PositionD. Process4. 下列哪个不是工业机器人常见的控制方式?A. 伺服控制B. 步进控制C. 模糊控制D. 逻辑控制5. 在自动化系统中,SCADA代表什么?A. Supervisory Control And Data AcquisitionB. System Control And Data AccessC. Supervisory Command And Data AcquisitionD. System Command And Data Access6. 下列哪种通信协议常用于工业自动化?A. HTTPB. FTPC. ModbusD. SMTP7. 在电气自动化中,HMI代表什么?A. Human Machine InterfaceB. High Maintenance InterfaceC. High Management InteractionD. Human Maintenance Interaction8. 下列哪种设备用于将电能转换为机械能?A. 发电机B. 变压器C. 电动机D. 电容器9. 在智能控制系统中,下列哪个不是常见的控制算法?A. 遗传算法B. 神经网络C. 线性规划D. 逻辑回归10. 下列哪种传感器通常用于检测液位?A. 光电传感器B. 热电偶C. 压力传感器D. 超声波传感器11. 在电气自动化系统中,DCS代表什么?A. Distributed Control SystemB. Direct Current SystemC. Data Control SystemD. Digital Control System12. 下列哪种设备用于将交流电转换为直流电?A. 变压器B. 整流器C. 逆变器D. 电容器13. 在智能控制系统中,下列哪个不是常见的控制策略?A. 开环控制B. 闭环控制C. 自适应控制D. 随机控制14. 下列哪种传感器通常用于检测速度?A. 光电传感器B. 热电偶C. 压力传感器D. 编码器15. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram16. 下列哪种设备用于将直流电转换为交流电?A. 变压器B. 整流器D. 电容器17. 在智能控制系统中,下列哪个不是常见的控制器?A. PLCB. DCSC. SCADAD. HMI18. 下列哪种传感器通常用于检测位置?A. 光电传感器B. 热电偶C. 压力传感器D. 编码器19. 在电气自动化系统中,下列哪个不是常见的通信协议?A. ModbusB. ProfibusC. Ethernet/IPD. HTTP20. 下列哪种设备用于存储电能?A. 电池B. 变压器C. 电动机D. 电容器21. 在智能控制系统中,下列哪个不是常见的控制算法?A. 模糊逻辑B. 神经网络C. 遗传算法D. 逻辑回归22. 下列哪种传感器通常用于检测压力?A. 光电传感器B. 热电偶C. 压力传感器D. 超声波传感器23. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram24. 下列哪种设备用于将电能转换为光能?B. 变压器C. 电动机D. 发光二极管25. 在智能控制系统中,下列哪个不是常见的控制策略?A. 开环控制B. 闭环控制C. 自适应控制D. 随机控制26. 下列哪种传感器通常用于检测流量?A. 光电传感器B. 热电偶C. 压力传感器D. 流量计27. 在电气自动化系统中,下列哪个不是常见的通信协议?A. ModbusB. ProfibusC. Ethernet/IPD. HTTP28. 下列哪种设备用于将电能转换为热能?A. 发电机B. 变压器C. 电动机D. 电热器29. 在智能控制系统中,下列哪个不是常见的控制算法?A. 模糊逻辑B. 神经网络C. 遗传算法D. 逻辑回归30. 下列哪种传感器通常用于检测湿度?A. 光电传感器B. 热电偶C. 压力传感器D. 湿度传感器31. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram32. 下列哪种设备用于将电能转换为声能?A. 发电机B. 变压器C. 电动机D. 扬声器33. 在智能控制系统中,下列哪个不是常见的控制策略?A. 开环控制B. 闭环控制C. 自适应控制D. 随机控制34. 下列哪种传感器通常用于检测振动?A. 光电传感器B. 热电偶C. 压力传感器D. 加速度计35. 在电气自动化系统中,下列哪个不是常见的通信协议?A. ModbusB. ProfibusC. Ethernet/IPD. HTTP36. 下列哪种设备用于将电能转换为机械能?A. 发电机B. 变压器C. 电动机D. 电容器37. 在智能控制系统中,下列哪个不是常见的控制算法?A. 模糊逻辑B. 神经网络C. 遗传算法D. 逻辑回归38. 下列哪种传感器通常用于检测气体浓度?A. 光电传感器B. 热电偶C. 压力传感器D. 气体传感器39. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram40. 下列哪种设备用于将电能转换为化学能?A. 发电机B. 变压器C. 电动机D. 电池41. 在智能控制系统中,下列哪个不是常见的控制策略?A. 开环控制B. 闭环控制C. 自适应控制D. 随机控制42. 下列哪种传感器通常用于检测光照强度?A. 光电传感器B. 热电偶C. 压力传感器D. 光敏传感器43. 在电气自动化系统中,下列哪个不是常见的通信协议?A. ModbusB. ProfibusC. Ethernet/IPD. HTTP44. 下列哪种设备用于将电能转换为热能?A. 发电机B. 变压器C. 电动机D. 电热器45. 在智能控制系统中,下列哪个不是常见的控制算法?A. 模糊逻辑B. 神经网络C. 遗传算法D. 逻辑回归46. 下列哪种传感器通常用于检测磁场强度?A. 光电传感器B. 热电偶C. 压力传感器D. 磁传感器47. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram48. 下列哪种设备用于将电能转换为机械能?A. 发电机B. 变压器C. 电动机D. 电容器49. 在智能控制系统中,下列哪个不是常见的控制策略?A. 开环控制B. 闭环控制C. 自适应控制D. 随机控制50. 下列哪种传感器通常用于检测电流?A. 光电传感器B. 热电偶C. 压力传感器D. 电流传感器51. 在电气自动化系统中,下列哪个不是常见的通信协议?A. ModbusB. ProfibusC. Ethernet/IPD. HTTP52. 下列哪种设备用于将电能转换为光能?A. 发电机B. 变压器C. 电动机D. 发光二极管53. 在智能控制系统中,下列哪个不是常见的控制算法?A. 模糊逻辑B. 神经网络C. 遗传算法D. 逻辑回归54. 下列哪种传感器通常用于检测电压?A. 光电传感器B. 热电偶C. 压力传感器D. 电压传感器55. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram56. 下列哪种设备用于将电能转换为声能?A. 发电机B. 变压器C. 电动机D. 扬声器57. 在智能控制系统中,下列哪个不是常见的控制策略?A. 开环控制B. 闭环控制C. 自适应控制D. 随机控制58. 下列哪种传感器通常用于检测振动?A. 光电传感器B. 热电偶C. 压力传感器D. 加速度计59. 在电气自动化系统中,下列哪个不是常见的通信协议?A. ModbusB. ProfibusC. Ethernet/IPD. HTTP60. 下列哪种设备用于将电能转换为机械能?A. 发电机B. 变压器C. 电动机D. 电容器61. 在智能控制系统中,下列哪个不是常见的控制算法?A. 模糊逻辑B. 神经网络C. 遗传算法D. 逻辑回归62. 下列哪种传感器通常用于检测气体浓度?A. 光电传感器B. 热电偶C. 压力传感器D. 气体传感器63. 在电气自动化系统中,下列哪个不是常见的编程语言?A. Ladder LogicB. Structured TextC. JavaD. Function Block Diagram64. 下列哪种设备用于将电能转换为化学能?A. 发电机B. 变压器C. 电动机D. 电池答案1. A2. B3. A4. D5. A6. C7. A8. C9. D10. D11. A12. B13. D14. D15. C16. C17. D18. D19. D20. A21. D22. C23. C24. D25. D26. D27. D28. D29. D30. D31. C32. D33. D34. D35. D36. C37. D38. D39. C40. D41. D42. D43. D44. D45. D46. D47. C48. C49. D50. D51. D52. D53. D54. D55. C56. D57. D58. D59. D60. C61. D62. D63. C64. D。
2023年危险化学品化工自动化控制仪表作业考试测试练习题

2023年危险化学品化工自动化控制仪表作业考试测试练习题1、(判断题)压力表用于测量有腐蚀性的介质时,应加装中性的隔离装置。
参考答案:正确2、(判断题)对每一台接入现场总线控制系统的设备,在投用前必须进行组态。
参考答案:正确3、(判断题)精小型气动薄膜执行机构与传统的气动薄膜执行机构相比,高度减少30%,重量也减轻30%,流通能力却增加30%,可调范围扩大到50∶1。
参考答案:正确4、(判断题)用电容式液位计测量介电质的液位时,液位变化,相当于电极面积在改变。
参考答案:错误5、(判断题)气动侧装式执行机构也称增力型执行机构参考答案:正确6、(判断题)利用标准节流装置测量流量时的导压管的内径不小于6mm,一般为10~12mm,导压管的长度最长不超过50m,最短不少于3m。
参考答案:正确7、(判断题)任意两种不同类型的金属导体都可以充当热电偶。
参考答案:错误8、(判断题)爆炸性气体环境的分区根据爆炸性气体环境出现的频率和持续时间把危险场所分为0区、1区和2区三个区域等级。
参考答案:正确9、(判断题)根据靶式流量计测量流量的基本原理可知,靶式流量计是一种阻力式仪表。
参考答案:正确10、(判断题)过滤操作时,通过过滤介质流出的液体称为滤渣。
参考答案:错误11、(判断题)在同一开度下直线流量特性的流量大于对数流量特性的流量,相对流量变化,直线流量特性小开度变化大、大开度变化小。
对数流量特性相对流量变化为常数。
参考答案:正确12、(判断题)在生产装置上或控制系统中使用的仪表其误差只有附加误差。
参考答案:错误13、(判断题)变浮力式液位计主要是沉筒式液位计,在结构上,有位移平衡式、力平衡式和带差动变压器的沉筒液面计三种类型。
参考答案:正确14、(判断题)微分控制规律的输出与输入偏差的大小和偏差变化的速度有关。
参考答案:错误15、(判断题)在带定位器的调节阀校验中,应该先校调节阀,在与定位器联校。
参考答案:正确16、(判断题)集散控制系统的发展进步是和计算机技术,通信技术、网络技术的发展密切相关的。
电气自动化技术与智能控制系统测试 选择题 61题

1题1. 在电气自动化系统中,PLC代表什么?A. 个人电脑B. 可编程逻辑控制器C. 电源控制器D. 程序逻辑控制2. 以下哪种传感器通常用于检测温度?A. 光电传感器B. 温度传感器C. 压力传感器D. 位移传感器3. 在智能控制系统中,PID控制器中的“P”代表什么?A. 比例B. 积分C. 微分D. 功率4. 工业机器人通常使用哪种编程语言?A. C++B. JavaC. PythonD. RAPID5. 以下哪项不是智能控制系统的组成部分?A. 传感器B. 执行器C. 计算机D. 打印机6. 在自动化系统中,SCADA代表什么?A. 系统控制和数据采集B. 软件控制和数据分析C. 系统控制和数据分析D. 软件控制和数据采集7. 以下哪种通信协议常用于工业自动化?A. HTTPB. TCP/IPC. ModbusD. FTP8. 在电气自动化中,HMI代表什么?A. 高性能模块B. 人机界面C. 硬件模块D. 高密度接口9. 以下哪种设备用于将电能转换为机械能?A. 发电机B. 电动机C. 变压器D. 电容器10. 在智能控制系统中,以下哪种算法用于优化控制策略?A. 遗传算法B. 线性规划C. 动态规划D. 贝叶斯网络11. 以下哪种传感器用于检测物体的接近?A. 温度传感器B. 光电传感器C. 压力传感器D. 位移传感器12. 在自动化系统中,以下哪种设备用于存储程序和数据?A. 传感器B. 执行器C. 控制器D. 存储器13. 以下哪种通信方式适用于长距离数据传输?A. 无线电B. 红外线C. 蓝牙D. 近场通信14. 在电气自动化中,以下哪种设备用于检测电流?A. 电压表B. 电流表C. 电阻表D. 功率表15. 以下哪种控制策略适用于非线性系统?A. PID控制B. 模糊控制C. 比例控制D. 积分控制16. 在智能控制系统中,以下哪种设备用于执行机械操作?A. 传感器B. 执行器C. 控制器D. 显示器17. 以下哪种传感器用于检测物体的形状?A. 光电传感器B. 视觉传感器C. 温度传感器D. 压力传感器18. 在自动化系统中,以下哪种设备用于将信号转换为数字信号?A. 模拟转换器B. 数字转换器C. 信号转换器D. 数据转换器19. 以下哪种通信协议适用于实时数据传输?A. HTTPB. TCP/IPC. ModbusD. FTP20. 在电气自动化中,以下哪种设备用于控制电路的开关?A. 继电器B. 变压器C. 电容器D. 电阻器21. 以下哪种传感器用于检测物体的颜色?A. 光电传感器B. 视觉传感器C. 温度传感器D. 压力传感器22. 在智能控制系统中,以下哪种设备用于显示系统状态?A. 传感器B. 执行器C. 控制器D. 显示器23. 以下哪种通信方式适用于短距离数据传输?A. 无线电B. 红外线C. 蓝牙D. 近场通信24. 在电气自动化中,以下哪种设备用于检测电压?A. 电压表B. 电流表C. 电阻表D. 功率表25. 以下哪种控制策略适用于复杂系统?A. PID控制B. 模糊控制C. 比例控制D. 积分控制26. 在智能控制系统中,以下哪种设备用于执行电气操作?A. 传感器B. 执行器C. 控制器D. 显示器27. 以下哪种传感器用于检测物体的距离?A. 光电传感器B. 视觉传感器C. 温度传感器D. 压力传感器28. 在自动化系统中,以下哪种设备用于将数字信号转换为模拟信号?A. 模拟转换器B. 数字转换器C. 信号转换器D. 数据转换器29. 以下哪种通信协议适用于安全数据传输?A. HTTPB. TCP/IPC. ModbusD. FTP30. 在电气自动化中,以下哪种设备用于控制电路的电流?A. 继电器B. 变压器C. 电容器D. 电阻器31. 以下哪种传感器用于检测物体的透明度?A. 光电传感器B. 视觉传感器C. 温度传感器D. 压力传感器32. 在智能控制系统中,以下哪种设备用于记录系统数据?A. 传感器B. 执行器C. 控制器D. 记录器33. 以下哪种通信方式适用于高速数据传输?A. 无线电B. 红外线C. 蓝牙D. 近场通信34. 在电气自动化中,以下哪种设备用于检测功率?A. 电压表B. 电流表C. 电阻表D. 功率表35. 以下哪种控制策略适用于快速响应系统?A. PID控制B. 模糊控制C. 比例控制D. 积分控制36. 在智能控制系统中,以下哪种设备用于执行液压操作?A. 传感器B. 执行器C. 控制器D. 显示器37. 以下哪种传感器用于检测物体的硬度?A. 光电传感器B. 视觉传感器C. 温度传感器D. 压力传感器38. 在自动化系统中,以下哪种设备用于将信号转换为光信号?A. 模拟转换器B. 数字转换器C. 信号转换器D. 光转换器39. 以下哪种通信协议适用于大量数据传输?A. HTTPB. TCP/IPC. ModbusD. FTP40. 在电气自动化中,以下哪种设备用于控制电路的频率?A. 继电器B. 变压器C. 电容器D. 电阻器41. 以下哪种传感器用于检测物体的湿度?A. 光电传感器B. 视觉传感器C. 温度传感器D. 湿度传感器42. 在智能控制系统中,以下哪种设备用于显示系统参数?A. 传感器B. 执行器C. 控制器D. 显示器43. 以下哪种通信方式适用于低功耗数据传输?A. 无线电B. 红外线C. 蓝牙D. 近场通信44. 在电气自动化中,以下哪种设备用于检测电阻?A. 电压表B. 电流表C. 电阻表D. 功率表45. 以下哪种控制策略适用于稳定系统?A. PID控制B. 模糊控制C. 比例控制D. 积分控制46. 在智能控制系统中,以下哪种设备用于执行气动操作?A. 传感器B. 执行器C. 控制器D. 显示器47. 以下哪种传感器用于检测物体的振动?A. 光电传感器B. 视觉传感器C. 温度传感器D. 振动传感器48. 在自动化系统中,以下哪种设备用于将信号转换为声信号?A. 模拟转换器B. 数字转换器C. 信号转换器D. 声转换器49. 以下哪种通信协议适用于实时监控?A. HTTPB. TCP/IPC. ModbusD. FTP50. 在电气自动化中,以下哪种设备用于控制电路的相位?A. 继电器B. 变压器C. 电容器D. 电阻器51. 以下哪种传感器用于检测物体的磁性?A. 光电传感器B. 视觉传感器C. 温度传感器D. 磁传感器52. 在智能控制系统中,以下哪种设备用于显示系统报警?A. 传感器B. 执行器C. 控制器D. 显示器53. 以下哪种通信方式适用于高可靠性数据传输?A. 无线电B. 红外线C. 蓝牙D. 近场通信54. 在电气自动化中,以下哪种设备用于检测电容?A. 电压表B. 电流表C. 电阻表D. 电容表55. 以下哪种控制策略适用于精确控制?A. PID控制B. 模糊控制C. 比例控制D. 积分控制56. 在智能控制系统中,以下哪种设备用于执行电动操作?A. 传感器B. 执行器C. 控制器D. 显示器57. 以下哪种传感器用于检测物体的重量?A. 光电传感器B. 视觉传感器C. 温度传感器D. 重量传感器58. 在自动化系统中,以下哪种设备用于将信号转换为电信号?A. 模拟转换器B. 数字转换器C. 信号转换器D. 电转换器59. 以下哪种通信协议适用于安全监控?A. HTTPB. TCP/IPC. ModbusD. FTP60. 在电气自动化中,以下哪种设备用于控制电路的功率?A. 继电器B. 变压器C. 电容器D. 电阻器61. 以下哪种传感器用于检测物体的角度?A. 光电传感器B. 视觉传感器C. 温度传感器D. 角度传感器答案1. B2. B3. A4. D5. D6. A7. C8. B9. B10. A11. B12. D13. A14. B15. B16. B17. B18. A19. C20. A21. B22. D23. C24. A25. B26. B27. B28. A29. C30. A31. B32. D33. A34. D35. A36. B37. D38. D39. B40. A41. D42. D43. C44. C45. A46. B47. D48. D49. C50. A51. D52. D53. A54. D55. A56. B57. D58. D59. C60. A61. D。
智能感应器的智能检测与自动控制考核试卷

B.压阻传感器
C.电容传感器
D.光电传感器
25.下列哪种信号处理方法可以实现信号的压缩?()
A.采样保持
B.低通滤波
C.高通滤波
D.压缩器
26.下列哪种控制器适用于复杂系统控制?()
A. PID控制器
B.模糊控制器
C. PID+模糊控制器
D.基于神经网络的控制器
27.下列哪种传感器可以检测物体的速度?()
C.系统集成
D.系统测试
9. PID控制器中的P、I、D分别对应哪些控制作用?()
A.比例控制
B.积分控制
C.微分控制
D.预测控制
10.下列哪些是智能传感器信号处理的目的?()
A.提高信号质量
B.便于后续处理
C.减少噪声影响
D.提高测量精度
11.下列哪些是智能传感器在工业自动化中的应用?()
A.生产线监控
标准答案
一、单项选择题
1. A
2. B
3. C
4. A
5. A
6. B
7. C
8. C
9. C
10. B
11. C
12. C
13. A
14. D
15. B
16. B
17. D
18. D
19. A
20. C
21. B
22. B
23. C
24. C
25. D
二、多选题
1. A, B, C, D
2. A, B, C, D
6.无线传输的传感器信号不受电磁干扰。()
7.压力传感器只能检测静态压力。()
8.光电传感器在光照条件下输出信号强度恒定。()
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制测试题附答案 1 / 12 1.输入已知,确定系统,使输出尽可能复合给定的最佳要求,称为( ) A.滤波与预测 B. 最优控制 C.最优设计 D.系统分析 2.开环控制的特征是( ) A.系统无执行环节 B.系统无给定环节 C.系统无反馈环节 D.系统无放大环节 3. 对于代表两个或两个以上输入信号进行( )的元件又称比较器。 A.微分 B.相乘 C.加减 D.相除 4. 直接对控制对象进行操作的元件称为( ) A.给定元件 B.放大元件 C.比较元件 D.执行元件 5. 在系统对输入信号的时域响应中,其调整时间的长短是与( )指标密切相关。 A.允许的峰值时间 B.允许的超调量 C.允许的上升时间 D.允许的稳态误差 6. 已知系统的微分方程为txtxtxi22600,则系统的传递函数是( ) A.131s B.132s C.261s D.232s
7. 已知系统的微分方程为txtxtxtxi2263000,则系统的传递函数是( ) A.26322ss B.26312ss C.36222ss D.36212ss 自动控制测试题附答案 2 / 12 8.引出点前移越过一个方块图单元时,应在引出线支路上( ) A.并联越过的方块图单元 B.并联越过的方块图单元的倒数 C.串联越过的方块图单元 D.并联越过的方块图单元的倒数 9.采用负反馈连接时,如前向通道的传递函数为G(s),反向通道的传递函数为H(s),则其等效传递函数为( ) A.)(1)(SGSG B.)()(11SHSG C.)()(1)(SHSGSG D.)()(1)(SHSGSG— 10.某环节的传递函数是5173sssG,则该环节可看成由( )环节串联而组成。 A.比例、积分、滞后 B.比例、惯性、微分 C.比例、微分、滞后 D.比例、积分、微分 11.某环节的传递函数是sssG235,则该环节可看成由( )环节串联而组成。 A.比例、积分、滞后 B.比例、惯性、微分 C.比例、微分、滞后 D.比例、积分、微分 12.梅逊公式主要用来( ) A.判断稳定性 B.计算输入误差 C.求系统的传递函数 D.求系统的根轨迹 13.二阶欠阻尼系统的性能指标只与阻尼比有关的是( ) A.上升时间 B.峰值时间 C.调整时间 D.最大超调量 14. 若系统的开环传递函数为2)(5 10ss,则它的开环增益为( ) A.10 B.2 C.1 D.5 自动控制测试题附答案 3 / 12 15.二阶系统的传递函数12412sssG,其阻尼比ζ是( ) A.0.5 B.1 C.2 D.4 16.通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 17.为了保证系统稳定,则闭环极点都必须在( )上。 A.s左半平面 B.s右半平面 C.s上半平面 D.s下半平面 18.设单位负反馈控制系统的开环传递函数)()(assKsG,其中K>0,
a>0,则闭环控制系统的稳定性与( ) A.K值的大小有关 B.a值的大小有关 C.a和K值的大小无关 D.a和K值的大小有关 19.与15题一样 20.二阶系统的传递函数52 5)(2sssG,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 21.如果二阶震荡环节的对数幅频特性曲线存在峰值,则阻尼比的值为( ) A. 0 ≤ ζ ≤ 0.707 B. 0 < ζ < 1 C. ζ > 0.707 D. ζ > 1 22.一闭环系统的开环传递函数为4(3)()(23)(4)sGssss,则该系统( ) A.0型系统,开环放大系数K为2 B.I型系统,开环放大系数K为2 C.I型系统,开环放大系数K为1 D.0型系统,开环放大系数K为1 自动控制测试题附答案 4 / 12 23.系统的传递函数)4)(1(52ssssG,其系统的增益和型次为 ( ) A.5,2 B.5/4,2 C.5,4 D.5/4,4 24.下列判别系统稳定性的方法中,哪一个是在频域里判别系统稳定性的判据( ) A.劳斯判据 B.赫尔维茨判据 C.奈奎斯特判据 D.根轨迹法 25.主导极点的特点是( ) A.距离虚轴很近 B.距离实轴很近 C.距离虚轴很远 D.距离实轴很远 26. 以下关于系统稳态误差的概念正确的是( C ) A.它只决定于系统的结构和参数 B.它只决定于系统的输入和干扰 C.与系统的结构和参数、输入和干扰有关 D.它始终为0 27.设一阶系统的传递函数是12ssG,且容许误差为5%,则其调整时间为( ) A.1 B.2 C.3 D.4 28..设一阶系统的传递函数是23ssG,且容许误差为2%,则其调整时间为( ) A.1 B.1.5 C.2 D.3 自动控制测试题附答案
5 / 12 29.某单位反馈系统的开环传递函数为:)5)(1(sssksG,当k=( )时,闭环系统临界稳定。 A.10 B.20 C.30 D.40 30. 比例环节的频率特性相位移( ) A.0° B.-90° C.90° D.-180° 31. ω从0变化到+∞时,延迟环节频率特性极坐标图为( ) A.圆 B.半圆 C.椭圆 D.双曲线 32.设开环系统频率特性G(jω)=3)1(4j,当ω=1rad/s时,其频率特性幅值A(1)=( ) A.24 B.24 C.2 D.22
33.一阶惯性系统21)(ssG的转角频率指( ) A.2 B.1 C.0.5 D.0
34.若已知某串联校正装置的传递函数为ssGc2)(,则它是一种( ) A.相位滞后校正 B.相位超前校正 C.微分调节器 D.积分调节器 35.若已知某串联校正装置的传递函数为1101)(sssGc,则它是一种( ) A.反馈校正 B.相位超前校正 C.相位滞后—超前校正 D.相位滞后校正 自动控制测试题附答案 6 / 12 36.某校正环节传递函数1101100)(sssGc,则其频率特性的奈氏图终点坐标为( ) A.(10,j0) B.(1,j0) C.(1,j1) D.(10,j1)
37.某串联校正装置的传递函数为TSTSKSG11)(, ɑ < 0,该校正装置为( ) A.滞后校正装置 B.超前校正装置 C.滞后-超前校正装置 D.超前-滞后校正装置
选择题答案 1.C 2.C 3.C 4.D 5.D 6.A 7.A 8.C 9.C 10.B 11.D 12.D 13.D 14.D 15.A 16.A 17.A 18.C 19.A 20.B 21.A 22.C 23.B 24.C 25.A 26.C 27.C 28.C 29.C 30.A 31.A 32.D 33.A 34.C 35.D 36.B 37.B 自动控制测试题附答案
7 / 12 一.填空 1、在单位斜坡输入信号作用下,I型系统的稳态误差ess=1/k 2、闭环控制机系统的特点是,在控制器和被控制对象之间不仅有正向控制的作用,而且还有___反向_控制作用,这种系统精度高,但 稳定性 较差。 3、反馈控制系统是根据给定值和__反馈值/测量值__的偏置进行调节的控制系统。 4、闭环控制系统中,真正对输出信号起控制作用的是偏差信号 。 5、对控制系统的首要要求是系统具有 稳定性 。 6一线性系统,当输入是单位脉冲函数时,其输出象函数与 传递函数 相同。- 7、传递函数反映了系统内在的固有特性,与 输入量/驱动函数 无关。 8、输入信号和反馈信号之间的比较结果称为 偏差信号 。 9、延迟环节不改变系统的幅频特性,仅使 相频特性 发生变化。 10、利用 梅森 公式可以根据复杂的信号流图直接求出系统总的传递函数。 11、对于最小相位系统一般只要知道系统的 开环幅频特性 就可以判断其稳定性。 12、一阶系统的传递函数为G(S)=7/(s+2).其阶跃信号相应曲线在T=0的处切线斜率为 7 自动控制测试题附答案 8 / 12 13、二阶振荡环节标准传递函数是 wwswnnssRC222n2)()s( 14、某典型环节的传递函数是G(s)=1/s+2,,则系统的时间常数是0.5 15、若减少二阶欠阻尼系统超调量,可采取的措施是 增大阻尼比 。 16、当输入为正弦函数时,频率特性G(jw)与传递函数G(s) 的关系为 S=Jw 17、一般讲系统的位置误差指输入是 阶跃信号 所引起的输出位置上的误差 18、线性系统稳定性是系统 固有 特性,与系统的 输入 无关。 19、在找动作用点与偏差信号之间加上 积分环节 ,能使静态误差降为0. 20、当乃氏图逆时针从第二象限越过负实轴到第三象限去时成为 正穿越 21、二阶系统对加速度响应信号的稳态误差为1/K 及不能跟踪加速度信号。 22、利用终值定理可以在复频域中的到系统在时间域中的 稳态误差 23、系统输出的响应的稳态值与 反馈值/给定值 之间的偏差称为稳态偏差。 24、在单位斜坡输入型号的作用下,II型系统的稳态误差e= 0 25、积分环节的福相频率特性图为 负虚轴 ,而微分环节的福相频率特性图为 正虚轴