影像重采样
摄影测量复习题

、名词解释1、像片比例尺:把摄影像片当做水平像片,地面取平均高程,这时相片上线段l 与地面上相应线段水平距离 L 之比。
2、绝对航高 :相对于平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度。
3、相对航高:摄影机物镜相对于某一基准面的高度。
4、像点位移:在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜,地面有起伏 时,便会导致地面点在航摄相片上构象相对于在理想情况下的构象,产生位置的差异,这一差异称为像 点位移。
5、摄影基线 :航线方向相邻两个摄影站点间的空间距离。
6、航向重叠:同一条航线内相邻像片之间的影像重叠7、旁向重叠:两相邻航带像片之间也需要有一定的影像重叠,这种重叠影像部分称为旁向重叠度。
8、像片倾角:摄影瞬间摄影机主光轴偏离铅垂线的夹角称为相片倾角。
9、像片的方位元素:确定摄影瞬间摄影物镜(摄影中心)与像片在地面设定的空间坐标系中的位置与姿 态参数,即确定这三者之间相关位置的参数。
10、像片的内方位元素:表示摄影中心与像片之间相互位置的参数。
11、像片的外方位元素:表示摄影中心与像片在地面坐标系中的位置和姿态的参数。
12、相对定向元素:确定一个立体像对两像片的相对位置的元素 。
13、绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数。
14、单像空间后方交会:利用影像覆盖范围内一定数量的控制点的空间坐标与影像坐标,根据共线条件 方程,反求该影像的外方位元素,这种方法称单幅影像的空间后方交会。
15、空间前方交会:由立体像对左右两影像的内、外方位元素和同名像点影像坐标量测值来确定相应模 型点坐标(或地面点的地面坐标) ,称立体像对的空间前方交会。
16、双像解析摄影测量:17、空中三角测量:根据航摄像片上所测量的像点坐标以及极少量的地面控制点求出地面加密点的物方 空间坐标。
18、POS :(机载定位定向系统)是基于全球定位系统(GPS )和惯性测量装置(IMU )的直接测定影像外方位元素的现代航空摄影导航系统,可用于在无地面控制或仅有少量地面控制点情况下的航空遥感对 地定位和影像获取。
摄影考试重点题目与答案
名词解释1。
摄影测量学:利用光学摄影机摄影的像片,研究和确定被摄物体的形状、大小、位置、性质和相互关系的一门科学技术2。
像点位移:当地面起伏、像片倾斜时,地面点在像片上的构像相对理想情况时产生的位置差异。
3.摄影比例尺:摄影像片当作水像片,地面取平均高程时,这时像片上的一段的水平距L 之比为摄影比例尺.4。
数字影像相关:利用计算机对数字影像进行数字计算的方式完成影像的相关,识别出两幅(或多幅)影像的同名像点。
5.解析空中三角测量:以像点坐标为依据,采用一定的数学模型,用少量控制点作为平差条件,解求加密点物方坐标的理论方法或作业过程。
6.摄影基线:相邻两摄站点之间的连线7.航线弯曲度:偏离航线两端像片主点间的直线最远的像主点到该直线的距离与该直线距离之比。
8.立体像对:在航空摄影时,同一条航线相邻摄站拍摄的两张像片具有60%左右的重叠度,这两张像片成为立体像对。
9.相对定向:确定一个立体像对中两张像片相对位置的参数10。
绝对定向:确定相对定向所建立的几何模型的比例尺和模型空间方位。
11。
中心投影:投影光线相互平行的投影12.影像内定向:将仪器坐标系中的像点坐标转换为像平面坐标系中坐标的过程13.摄影基线:航线方向相邻两个摄影站点间的空间距离14。
航向重叠:同一条航线上相邻两张像片的重叠度15。
像片的外方位元素:确定摄影瞬间像片在空间坐标系中位置和姿态的参数。
或称为表示摄影中心和像片在地面坐标系中的位置和姿态的参数.16。
内方位元素:确定投影中心(物镜后节点)相对于像平面位置关系的参数17。
核线相关:沿核线寻找同名像点18.DEM:数字地形模型中地形属性为高程时称为数字高程模型19。
影像数字化:将透明正片或负片放在影像数字化器上,把像片上像点的灰度值用数字形式记录下来,此过程为影像数字化20。
模型绝对定向:用已知的地面控制点求解相对定向所建立的几何模型的比例尺和模型空间方位元素21。
同名核线:同一核面与左右影像相交形成的两条核线,其中核面指物方点与摄影基线所确定的平面22.同名像点:同一地面点发出的两条光线经左右摄影中心在左右像片上构成的像点称为同名像点。
摄影测量名词解释
1.像片的内方位元素:确定摄影物镜后节点相对于像片平面关系的数据。
2.摄影基线:两相邻摄站之间的距离为摄影基线。
3.核面:摄影基线与地面任一点组成的平面称为该平面的核面。
4.数字影像重采样:由于数字影响是个规则的灰度格序列,当对数字影像进行处理时,所求得的点位恰好落在原始像片上像素中心,要获得该点灰度值,就要在原采样基础上再一次采样。
5.像片主距:像片主点到物镜后节点的距离。
6.相对航高:摄影物镜相对于某一基准的高度7.像片比例尺:航摄像片上一线段为l的影像与地面上相应线段的水平距离L之比。
8.绝对航高:是相对干平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度。
9.中心投影:投影光线会聚于一点的投影称为中心投影。
10.平行投影:投影光线相互平行的投影为平行投影11.航向重叠:同一条航线上相邻两张像片的重叠度12.旁向重叠:相邻航线相邻两像片的重叠度13.像片倾角:摄影瞬间摄影机的主光轴近似与地面垂直,偏离铅垂线的夹角小于2度~3度,夹角为像片倾角。
14.像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y015.像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。
16.核线相关:沿核线寻找同名像点,即核线相关。
17.相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型。
即确定一个立体像对两像片的相对位置。
18.绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数称绝对定向元素19.单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线条件方程,反求该像片的外方位元素。
20.空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为空间前方交会。
21.双像解析摄影测量:按照立体像对与被摄物体的几何关系,以数学计算方式,通过计算机解求被摄物体的三维空间坐标的方法,称为双像解析摄影测量。
遥感数字图像处理影像校正ppt课件
-1-
大气影响辐射纠正
精确的校正公式需要找出每个波段像元亮度值 与地物反射率的关系。为此需得到卫星飞行时 的大气参数,以求出透过率Tθ、Tφ等因子。如 果不通过特别的观测,一般很难得到这些数据, 所以,常常采用一些简化的处理方法,只去掉 主要的大气影响,使影像质量满足基本要求。
-1-
第二讲 影像校正
1 数字影像的性质和特点 2 影像校正
-1-
1 数字影像的性质与特点
1.1模拟影像与数字影像 1.2 数字影像的特点 1.3 多波段数字影像的数据格式
-1-
1 数字影像的性质与特点
1.1模拟影像与数字影像 – 模拟影像:普通像片那样的灰度级及颜色连续变化 的影像 – 数字影像:把模拟影像分割成同样形状的小单元, 以各个小单元的平均亮度值或中心部分的亮度值作 为该单元的亮度值进行数字化的影像。
-1-
2.2 大气校正
进入大气的太阳辐射会发生反射、折射、吸收、散 射和透射。其中对传感器接收影响较大的是吸收和散射。 为消除由大气的吸收、散射等引起失真的辐射校正,称 作大气校正。
-1-
2.2.1 影响遥感影像辐射失真的大气因素
(1)大气的消光(吸收和散射) (2)天空光(大气散射)照射 (3)路径辐射
-1-
大气影响的回归分析法纠正
假定某红外波段,存在程辐射为主的大气影响,且亮 度增值最小,接近于零,设为波段a。现需要找到其他 波段相应的最小值,这个值一定比a波段的最小值大一 些,设为波段b,分别以a,b波段的像元亮度值为坐标, 作二维光谱空间,两个波段中对应像元在坐标系内用 一个点表示。由于波段之间的相关性,通过回归分析 在众多点中一定能找到一条直线与波段b的亮度Lb轴相 交,且
遥感影像重采样方法实现与应用研究
遥感影像重采样方法实现与应用研究1. 引言1.1 研究背景遥感影像重采样是指利用一定的数学方法和模型,对原始遥感影像进行重新采样,以达到改善影像质量和增加影像细节的目的。
重采样方法的研究和应用对于提高遥感影像的空间分辨率和准确性具有重要意义。
目前,关于遥感影像重采样方法的研究已经取得了一定的进展,但在实际应用中还存在着一些问题亟待解决。
本文将对遥感影像重采样方法进行进一步深入的研究和探讨,旨在提高遥感影像的分辨率和质量,为遥感技术的发展提供更多的支持和帮助。
1.2 研究意义遥感影像重采样方法在遥感影像处理中具有重要的意义。
随着遥感技术的不断发展和遥感数据的不断增加,遥感影像的分辨率和精度要求也越来越高。
而遥感影像重采样方法可以有效地提高遥感影像的空间分辨率和准确性,进而提升遥感影像的应用价值和实用性。
具体来说,遥感影像重采样方法可以帮助提高遥感影像的视觉效果和解译精度,为遥感数据的地形分析、土地利用监测、资源调查等应用提供更可靠的支持。
遥感影像重采样方法还可以帮助缓解遥感数据间的空间不匹配问题,提高不同遥感数据集之间的一致性和比较性,为遥感数据融合和综合分析提供更好的基础。
通过对遥感影像重采样方法进行研究与应用,可以更好地利用遥感数据资源,提高遥感数据的利用效率和价值,进而推动遥感技术在地球科学、环境监测、城市规划等领域的广泛应用和发展。
1.3 研究目的本文旨在探讨遥感影像重采样方法的实现与应用研究,通过对现有重采样方法的概述和分类,分析其实现过程和应用案例,评价其效果,并对其优势、局限性进行总结。
具体而言,本文旨在达到以下研究目的:1. 系统总结不同类型的遥感影像重采样方法,包括传统的插值方法、深度学习方法和卷积神经网络方法等,分析各种方法的优缺点和适用范围,为选择合适的重采样方法提供参考。
2. 探讨遥感影像重采样方法的实现过程,包括数据预处理、算法设计和参数优化等方面,深入分析每个环节的关键问题和解决方法,为实际应用提供技术支持。
SAR影像几何校正中重采样和插值方法探析
SAR影像几何校正中重采样和插值方法探析摘要:几何精校正中重采样内插方法是为了使校正后的输出图像像元与输入的未校正图像相对应,根据确定的校正公式,对输入图像的数据重新排列。
常用的重采样方法有最近邻点法、双线性插值和三次卷积法。
考虑到上面3种方法的优缺点,提出一种快速重采样方法。
关键词:几何精校正插值方法重采样0 引言几何校正按照重采样方式分为直接法和间接法。
以间接法校正为例,加入输出图像阵列中的任一像素在原始图像中的投影点位坐标值为整数时,便可简单地将整数点位上的原始图像的已有亮度值间接取出填入输出图像。
但若该投影点位的坐标计算值不为整数时,原始图像阵列中该非整数点位上并无现成的亮度存在,于是就必须采用适当的方法把该点位周围邻近整数点位上亮度值对该点的亮度贡献累积起来,构成该点位的新亮度值。
这个过程即称为数字图像亮度值的重采样。
1 精校正方法几何精校正中重采样内插方法是为了使校正后的输出图像像元与输入的未校正图像相对应,根据确定的校正公式,对输入图像的数据重新排列。
常用的重采样方法有最近邻点法、双线性插值和三次卷积法。
最近邻点法的优点是算法简单且能保持原始图像的亮度值不变,但常使采样后的遥感图像在亮度上不连续,原来光滑的边界出现锯齿状。
这种情况在图像的边缘表现得尤为突出。
双线性插值法的优点是计算较为简单,校正后的图像亮度连续,但因其具有低通滤波的性质,造成高频信息的损失,常使采样后的遥感图像变得模糊。
三次卷积法对前述两种方法的缺点都能克服,但计算量极大。
2 重采样方法2.1 双线性插值法该法的重采样函数是对辛克函数的更粗略近似,表达方式如下:3 结语该采样算法与双线性插值法很相似,不同的是该算法只考虑待采样点周围的两个点,而不是双线性插值法的四个点,因此从算法上来说较后者简单,与最近邻近插值法相比,该算法考虑了待采样点周围的像素亮度值对待采样点的亮度值的贡献,能够保持原图像的光谱信息,使得重采样图像具有较好的采样效果和质量。
ERDAS IMAGINE遥感影像处理操作流程-2010全国土地利用变更调查监测与核查项目
北京望神州科技有限公司 北京海淀区上地三街9号嘉华大厦F座507室 邮编:100085 联系人:王鹤 Tel:(010)82781747/49‐107 手机:13439429782 邮箱:wanghe@
6
在状态栏可正要求 GCP 总体误差一般平坦区域要小于 1,山区小于 2。如 果误差较大,需要进行修改,删除点或增加新的控制点降低误差。 3、影像重采样 我们采集的点的数量、分布、精度都满足要求后,就可以进行影像的重采样 工作。在工具栏点击影像重采样 图标,打开影像重采样对话框。
RapidEye 原始数据 (5 波段)
每个波段的 NITF数据
DEM
控制资料
逐波段正射纠正 (选用NITF RPC模型)
波段合成
影像镶嵌
DOM成果
图1 使用RapidEye制作DOM的基本流程
北京望神州科技有限公司 北京海淀区上地三街9号嘉华大厦F座507室 邮编:100085 联系人:王鹤 Tel:(010)82781747/49‐107 手机:13439429782 邮箱:wanghe@
二 正射纠正 .......................................................................................................... 2 2.1 2.2 相关概念 ................................................................................................ 2 RapidEye 影像正射纠正 ...................................................................... 3 2.2.1 2.2.2 2.3 使用核心模块 .............................................................................. 3 使用 AutuSync ........................................................................... 9
数字影像重采样名词解释
数字影像重采样名词解释
数字影像重采样是一种数字图像处理技术,用于在改变图像的大小或分辨率时对像素进行重新分配。
在数字影像处理中,当需要对图像进行缩放、旋转或变换时,由于像素的数量和位置发生了变化,需要通过重采样来生成新的像素值。
重采样的目的是在保持图像整体外观和细节的同时,根据新的像素网格重新计算像素值。
常见的重采样方法包括最近邻插值、双线性插值和三次立方插值等。
这些方法根据周围像素的值来计算新像素的值,以填充新的像素网格。
通过数字影像重采样,可以实现对图像的大小调整、变形、旋转等操作,同时保持图像的质量和清晰度。
它是数字图像处理中常用的技术之一,广泛应用于图像编辑、计算机图形学、图像压缩等领域。
名词解释
36. 解析空中三角测量:根据影像上量测的像点坐标及少量控制点的大地坐标,求出未知点的大地坐标,使得已知 点增加到每个模型中不少于四个,然后利用这些已知点求解影像的外方位元素,因而解析空中三角测量也称为 摄影测量加密。
37. 解析空中三角测量的分类。 A、 根据平差中采用的数学模型可以分为航带法、独立模型法、光束法; B、 根据平差范围的大小可以分为单模型法、单航带法、区域网法。
B. 解析空中三角测量光束法平差中基本数学模型;
C. 摄影测量中的数字投影基础;
D. 计算模拟影像数据;
E. 利用数字高程模型与共线方程制作正射影像;
F. 利用 DEM 与共线方程进行单幅影像测图,等。
16、影响内定向:数字摄影测量中,利用平面相似变换等公式,将扫描坐标系转换为像平面坐标系的过程。
17、单向空间后方交会:利用影像覆盖范围内一定数量的控制点的空间坐标与影像坐标,根据共线条件方程,反求
B、 单独像对相对定向法:以左摄影中心为原点、左主核面为 XZ 平面、摄影基线为 X 轴的右手空间直角坐标系。
24. 摄影基线:相邻两摄站的连线。
25. 立体像对:在不同摄站上对同一地区摄影取具有重叠的连续的两张像片。
26. 同名光线:同一地面点发出的两条光线。
27. 同名像点:同名光线在左、右两张影像上的构像(交点)。
28. 核面:摄影基线与某一个地面点组成的平面。
29. 同名核线:核面与左右像片面的交线。确定同名核线的方法:基于数字影像的几何纠正和基于共面条件。
30. 共面条件方程:B(R1 × R2) = 0(B、R 均为向量) 共面条件方程作用:a、确定同名核线;b、确定相对定向元素。
31. 立体像对空间前方交会:由立体像对左右两影像的内、外方位元素和同名像点的影像坐标量测值来确定该点的 物方空间坐标,称做立体像对的空间前方交会。(注:点投影系数的推导)
遥感影像重采样
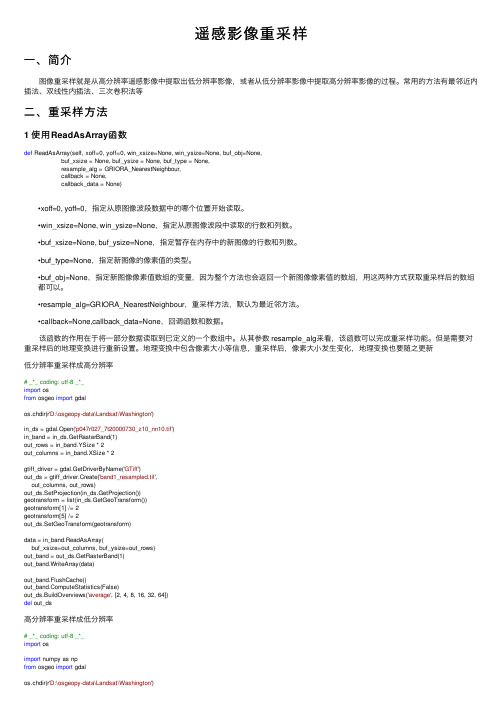
遥感影像重采样⼀、简介 图像重采样就是从⾼分辨率遥感影像中提取出低分辨率影像,或者从低分辨率影像中提取⾼分辨率影像的过程。
常⽤的⽅法有最邻近内插法、双线性内插法、三次卷积法等⼆、重采样⽅法1 使⽤ReadAsArray函数def ReadAsArray(self, xoff=0, yoff=0, win_xsize=None, win_ysize=None, buf_obj=None,buf_xsize = None, buf_ysize = None, buf_type = None,resample_alg = GRIORA_NearestNeighbour,callback = None,callback_data = None)•xoff=0, yoff=0,指定从原图像波段数据中的哪个位置开始读取。
•win_xsize=None, win_ysize=None,指定从原图像波段中读取的⾏数和列数。
•buf_xsize=None, buf_ysize=None,指定暂存在内存中的新图像的⾏数和列数。
•buf_type=None,指定新图像的像素值的类型。
•buf_obj=None,指定新图像像素值数组的变量,因为整个⽅法也会返回⼀个新图像像素值的数组,⽤这两种⽅式获取重采样后的数组都可以。
•resample_alg=GRIORA_NearestNeighbour,重采样⽅法,默认为最近邻⽅法。
•callback=None,callback_data=None,回调函数和数据。
该函数的作⽤在于将⼀部分数据读取到已定义的⼀个数组中。
从其参数 resample_alg来看,该函数可以完成重采样功能。
但是需要对重采样后的地理变换进⾏重新设置。
地理变换中包含像素⼤⼩等信息,重采样后,像素⼤⼩发⽣变化,地理变换也要随之更新低分辨率重采样成⾼分辨率# _*_ coding: utf-8 _*_import osfrom osgeo import gdalos.chdir(r'D:\osgeopy-data\Landsat\Washington')in_ds = gdal.Open('p047r027_7t20000730_z10_nn10.tif')in_band = in_ds.GetRasterBand(1)out_rows = in_band.YSize * 2out_columns = in_band.XSize * 2gtiff_driver = gdal.GetDriverByName('GTiff')out_ds = gtiff_driver.Create('band1_resampled.tif',out_columns, out_rows)out_ds.SetProjection(in_ds.GetProjection())geotransform = list(in_ds.GetGeoTransform())geotransform[1] /= 2geotransform[5] /= 2out_ds.SetGeoTransform(geotransform)data = in_band.ReadAsArray(buf_xsize=out_columns, buf_ysize=out_rows)out_band = out_ds.GetRasterBand(1)out_band.WriteArray(data)out_band.FlushCache()out_puteStatistics(False)out_ds.BuildOverviews('average', [2, 4, 8, 16, 32, 64])del out_ds⾼分辨率重采样成低分辨率# _*_ coding: utf-8 _*_import osimport numpy as npfrom osgeo import gdalos.chdir(r'D:\osgeopy-data\Landsat\Washington')in_ds = gdal.Open('nat_color.tif')out_rows = int(in_ds.RasterYSize / 2)out_columns = int(in_ds.RasterXSize / 2)num_bands = in_ds.RasterCountgtiff_driver = gdal.GetDriverByName('GTiff')out_ds = gtiff_driver.Create('nat_color_resampled.tif',out_columns, out_rows, num_bands)out_ds.SetProjection(in_ds.GetProjection())geotransform = list(in_ds.GetGeoTransform())geotransform[1] *= 2geotransform[5] *= 2out_ds.SetGeoTransform(geotransform)data = in_ds.ReadRaster(buf_xsize=out_columns, buf_ysize=out_rows)out_ds.WriteRaster(0, 0, out_columns, out_rows, data)out_ds.FlushCache()for i in range(num_bands):out_ds.GetRasterBand(i + 1).ComputeStatistics(False)out_ds.BuildOverviews('average', [2, 4, 8, 16])del out_ds 注意,在这种情况下,要确保⾏数和列数是整数,因为除法的结果可能是浮点数,如果不是整型数据,程序很可能报错。
数字影像的采样与重采样课件

每秒钟采样的次数,决定了数字信号的精度和图像 质量。
采样定理
采样定理指出,如果一个信号最高频率不超过Fs/2,则可以从其采 样信号中无失真地恢复原始信号。
采样定理是数字信号处理中的基本定理,对于数字影像处理同样 适用。
采样频率与图像质量
01
采样频率越高,图像质量越好, 但同时也会增加数据量。
足高质量影像的需求。
THANK YOU
感谢聆听
图像融合与拼接
总结词
图像融合是指将多个源图像的信息融合到一起,生成 通过选择合适的融合算法和参数,可 以将多个源图像的优点结合在一起,消除各自的缺点 ,得到具有更好视觉效果和信息含量的合成图像。图 像拼接是将多个图像拼接在一起,形成一个更大的、 连续的图像。在图像拼接中,关键的技术点包括特征 检测、图像配准和过渡区处理等,目的是实现拼接区 域的平滑过渡,提高拼接效果的自然性和连续性。
采样与重采样的未来发展方向
智能化发展
随着人工智能技术的不断发展, 未来的采样与重采样技术将更加 智能化,能够自适应地处理各种
复杂的场景和数据。
多维度发展
未来的采样与重采样技术将不仅 局限于二维影像,还将向三维甚 至多维度的方向发展,以满足更
广泛的应用需求。
高分辨率发展
随着数字影像分辨率的不断提高, 未来的采样与重采样技术将更加 注重高分辨率的处理能力,以满
02
在实际应用中,需要根据图像的 用途和存储空间限制来选择合适 的采样频率。
02
数字影像的采样方法
均匀采样
80%
定义
在图像的每个方向上等间距地选 取像素点,以获取图像的离散表 示。
100%
优点
计算简单,易于实现,适用于大 多数图像处理任务。
3-核线影像与核线重采样

数字影像的几何关系
z 表达像点与地面点之间关系
模型重建 几何量测 地物几何位置
影像中的几 何信息
x y
2013年3月17日
X Y Z
共线条件
Z
y
S(Xs, Ys, Zs)
x
a (x,y)
⎡X − X S ⎤ ⎡ x⎤ ⎢ y ⎥ = λR ⎢ Y − Y ⎥ S ⎥ ⎢ ⎢ ⎥ ⎢ ⎢ ⎦ ⎦ ⎣ Z − ZS ⎥ ⎣z⎥
线性内插示意图
• • • • • • • • • • • • • • • • • • • • • • • • • • • •
k y1 Δ
核线
2013年3月17日
线性内插
核线的重排列(重采样)
• 线性内差
1 d = [( Δ − y1 ) d 1 + y1 d 2 ] Δ
• 最邻近法
n n= =1 1/ /tg tgK K
′ d 1′ u ′ + d 2 x ′ = d 3′ u ′ + 1 ′ e 1′ u ′ + e 2 y ′ = ′u ′ + 1 e3
2013年3月17日
′ (kΔ, c) = g′(x0 , y0 ) g0 ′ ((k +1)Δ, c) = g′(x1, y1) g0
基于共面条件的同名核线几何关系
+ u + u + +
d 1 e 1
2
2
u
3
e
u=kΔ 采样间隔
2013年3月17日
核线的重排列(重采样)
是否是采 样点?
g 0 ( kΔ , c ) = g ( x 0 , y 0 ) g 0 (( k + 1) Δ , c ) = g ( x1 , y1 )
卫星影像重采样算法
卫星影像重采样算法
卫星影像重采样算法常用的有三种,包括最邻近法(Nearest Neighbor)、双线性内插法(Bilinear Interpolation)和立方卷积法(Cubic Convolution)。
1. 最邻近法:这是最简单的一种重采样方法,将新格网的像素值设置为原始影像中最接近的像素值。
该方法简单快速,适用于要求保留原始像素值的情况。
但这种方法最大可产生半个像元的位置偏移,可能造成输出图像中某些地物的不连贯。
2. 双线性内插法:使用原始影像中周围四个像素的加权平均值来计算新格网的像素值。
这种方法可以提供比最邻近法更平滑的图像结果,且精度明显提高,特别是对亮度不连续现象或线状特征的块状化现象有明显的改善。
虽然双线性内插法比最邻近发在计算量上有所增加,但其精度和效果都有显著提升。
3. 立方卷积法:使用更大的像素邻域进行加权计算,以提供更平滑的图像结果。
该方法对边缘有所增强,并具有均衡化和清晰化的效果,但它会改变原来的像元值,且计算量大。
这三种方法各有优缺点,在实际应用中,需要根据具体需求和情况选择合适的方法。
利用ENVI软件处理遥感影像(精)
科技信息1.ENVI 软件简介ENVI 全称是 The Environment for Visualizing Images , 是美国 ITT VIS (ITT Visual Information Solutions 公司的旗舰产品, 是由遥感领域的科学家采用交互式数据语言 IDL(InteractiveData Language 开发的一套功能强大的遥感影像处理软件。
它是快速、便捷、准确地从影像中提取信息的首屈一指的软件工具。
目前, 众多的影像分析师和科学家选择 ENVI 软件从遥感影像中提取信息。
ENVI 软件已经广泛应用于科研、环境保护、气象、石油矿产勘探、农业、林业、医学、国防安全、地球科学、公用设施管理、遥感工程、水利、海洋、勘察测绘和城市规划等领域。
2. 影像校正由于遥感器本身的内部结构、外部因素 (卫星的姿态、轨道、地球的运动和形状等等原因都可能引起影像的几何变形, 这叫几何失真。
为了纠正这些影像变形, 所以要对影像进行几何纠正。
而进行几何纠正通常是利用影像配准来实现的, 也就是在同一区域里利用基准影像 (或者地图对另一幅影像的校准, 以使两幅影像中的同名像元配准。
由此也可以清楚地看到影像配准的目的,就是使得我们能够获得比较准确的影像中的每一个像元所对应的地面的位置,这样在进行定性遥感中才能使得影像之间具有可比性,在定量遥感中才能使得我们能够确定具体目标。
在影像校正过程中, 首先是要选择所谓的地面控制点 (GCP , 这也是影像校正最关键、工作量最大的一步。
原则上 GCP 点的分布要求均匀, 并且数量要多, 这样校正的可靠性才比较高。
选择的 GCP 点一定是要在影像上容易辨识的, 地面上最好可以实测, 具有较固定的特征, 不会随时间的变化而变化的点。
本文实际采用某区域遥感得到的 SPOT 影像和 TM 影像,分别为 SPOTA 、TMA 、 SPOTB 、 TM B , 以所要分析的影像为例, 是选用 SPOT 影像为基准, 校正TM 影像, 分别打开 SPOT 影像和 TM 影像, 采用 ENVI 软件中的 Image to Image 校正功能。
数字影像重采样的方法

数字影像重采样的方法
数字影像重采样是将数字图像从一个像素格点网格映射到另一个像素格点网格的过程。
这通常涉及到调整图像的尺寸、分辨率或方向。
以下是一些常见的数字影像重采样方法:
1.最近邻插值(Nearest-neighbor interpolation):
最近邻插值是一种简单的插值方法,它将目标像素的值设定为原始图像中最近的像素的值。
这种方法计算速度快,但可能导致图像出现锯齿状的块状效应。
2.双线性插值(Bilinear interpolation):
双线性插值使用了目标像素周围的四个最近邻像素的权重来计算目标像素的值。
这种方法相比最近邻插值产生了更平滑的图像,但在一些情况下可能引入一些模糊。
3.双三次插值(Bicubic interpolation):
双三次插值在计算目标像素值时使用了周围16个最近邻像素的权重。
相较于双线性插值,双三次插值可以提供更高的图像质量,但计算复杂度也更高。
4.立方卷积插值(Cubic convolution interpolation):
立方卷积插值是一种使用像素值的立方函数的插值方法,对图像进行平滑处理。
它相对于双三次插值在一些情况下可能产生更好的结果。
nczos 插值:
Lanczos 插值使用sinc 函数的权重来计算目标像素的值,是一种高质量的插值方法。
它通常用于需要较高图像质量的应用,如图像放大。
在选择重采样方法时,需考虑应用场景、计算资源和图像质量要求。
不同的插值方法在不同的情况下表现良好,因此最佳的选择可能取决于具体的应用需求。
2 第1章 数字影像获取与重采样

11
2.1.2 数字影像采样
第一章
预备知识1 :δ函数(单位采样序列)
1, n = 0 δ ( n) = 0, n ≠ 0
山东农业大学测绘系
12
2.1.2 数字影像采样
第一章
预备知识2 :采样函数—— 梳状函数
s( x ) =
k = −∞
∑ δ ( x − k∆ x )
+∞
平移单位采样序列
S ( f ) = ∆f
k =−∞
∑ δ ( f − k ∆f ) = ∆f ⋅ comb
∆f
(f)
s(x)
S(f)
x ∆x
空间域s(x)
山东农业大学测绘系
-1/∆x
1/∆x
f
频率域S(f)
18
2.1.2 数字影像采样
第一章
设连续影像灰度函数为 g(x),若对其进行空间域的 等间隔采样,可以用采样函数与之相乘,即 ˆ ( x) = g ( x) ⋅ s( x) g
= =
k =−∞
W −1 ( f ) = sin c ( x ) sin 2π fl x = 2π fl x
山东农业大学测绘系
∑ ∑
+∞
+∞
g (k ∆x)δ ( x − k ∆x) ∗ g (k ∆x)
sin 2π fl x 2π fl x
k =−∞
sin 2π f l ( x − k ∆x) 2π f l ( x − k ∆x)
• 样点
被量测的“点”是小的区域像素
• 采样间隔
样点之间的距离
山东农业大学测绘系
9
2.1.2 数字影像采样
第一章
一、采样定理 要对一幅连续图像进行空间域的等间隔采 样,采样间隔取多大才能由离散图像重建连续图 像? 下面以一元连续函数为例说明采样间隔大小 的确定。
摄影测量考试题与详细答案

1摄影测量学2航向重叠3单像空间后方交会4相对行高5像片纠正6解析空中三角测量7透视平面旋转定律8外方位元素9核面10绝对定向元素一、填空1摄影测量的基本问题,就是将 _________ 换为__________ 。
2物体的色是随着 _________ 光谱成分和物体对光谱成分固有不变的__________ 、________ 和_________ 的能力而定的03人眼产生天然立体视觉的原因是由于 _________ 的存在°4相对定向完成的标志是 _________5光束法区域网平差时,若像片按垂直于航带方向编号,则改化法方程系数阵带宽为______ 若按平行于航带方向编号,则带宽为_____________三、简答题1两种常用的相对定向元素系统的特点及相对定向元素。
2倾斜位移的特性。
3单行带法相对定向后,为何要进行比例尺归化?为何进行?4独立模型法区域网平差基本思想。
5何谓正形变换?有何特点?四、论述题1空间后方交会的结算步骤。
2有三条航线,每条航线六张像片组成一个区域,采用光束法区域网平差。
(1)写出整体平差的误差方程式的一般式。
(2)将像片进行合理编号,并计算带宽,内存容量(3)请画出改化法方程系数阵结构简图。
A卷答案:、1是对研究的对象进行摄影,根据所获得的构想信息,从几何方面和物理方面加以分析研究,从而对所摄影的对象本质提供各种资料的一门学科。
2供测图用的航测相片沿飞行方向上相邻像片的重叠。
3知道像片的内方位元素,以及三个地面点坐标和量测出的相应像点的坐标,就可以根据共线方程求出六个外方位元素的方法。
4摄影瞬间航摄飞机相对于某一索取基准面的高度。
5将中心投影转换成正射投影时,经过投影变换来消除相片倾斜所引起的像点位移,使它相当于水平相片的构象,并符合所规定的比例尺的变换过程。
6是将建立的投影光束,单元模型或航带模型以及区域模型的数字模型,根据少数地面控制点,按最小二乘法原理进行平差计算,并求加密点地面坐标的方法。
遥感影像重采样方法实现与应用研究
基金项目:云南省高校工程研究中心资助项目 作者简介:王枭轩(1992—),男,研究生,主要研究方向:定量遥感、农业遥感研究;左小清(1972—),男,博士,教授,主要研究方 向:农业与生态环境遥感研究;杨泽楠(1995—),女,研究生,教授,主要研究方向:遥感图像处理。
王枭轩等:遥感影像重采样方法实现与应用研究
中图分类号:TP79 文献标识码:A
DOI: 10.3969/j.issn.l003-6970.2019.07.007
本文著录格式:王枭轩,左小清,杨泽楠.遥感影像重采样方法实现与应用研究[J].软件,2019,40 (7):42-46
Research on Realization and Application of Remote Sensing Image Resampling
WANG Xiao-xuan, ZUO Xiao-qing, YANG Ze-nan {.School ofland and resources engineering,Kunming University ofScience and Technology, Kunming 650093, China)
[Abstract] : Resampling is an important process of remote sensing image processing. In order to ensure the clarity and authenticity of remote sensing images, as well as the time efficiency of image processing, it is necessary to choose appropriate and correct methods to process image data, which is of great practical significance. In this paper, two resampling methods, the nearest interpolation method and the bilinear interpolation method, are used to rotate and scale the image, and the processing results are compared and analyzed. The results show that the nearest neighbor method is faster and bilinear than the nearest neighbor method, but the result of bilinear method is better than the nearest neighbor method. Therefore, when selecting an appropriate resampling method, it is necessary to comprehensively consider the time consumption and product effect, so as to select an appropriate resampling method. [Key words] : Resampling; Nearest interpolation method; Bilinear interpolation; Cubic convolution interpolation
遥感影像重采样方法实现与应用研究
遥感影像重采样方法实现与应用研究王枭轩;左小清;杨泽楠【摘要】重采样是对遥感图像进行处理的一个重要处理过程.为了保证遥感影像的清晰度、真实度,还有就是图像处理的时间效率,就要选择合适而且正确的方法来处理影像数据,这种选择是非常有实际意义的.本文采用最邻近插值法和双线性插值法这两种重采样方法对图像进行旋转、缩放,并对处理结果进行了对比分析.结果可知:最邻近法速度快,双线性次于它,但是双线性法得出的效果优于最邻近法.所以在选择合适的重采样方法的时候,要综合考虑耗时、产品的效果,从而选择合适的重采样方法.【期刊名称】《软件》【年(卷),期】2019(040)007【总页数】5页(P42-46)【关键词】重采样;最邻近插值法;双线性插值法;三次卷积插值【作者】王枭轩;左小清;杨泽楠【作者单位】昆明理工大学国土资源工程学院,云南昆明 650093;昆明理工大学国土资源工程学院,云南昆明 650093;昆明理工大学国土资源工程学院,云南昆明650093【正文语种】中文【中图分类】TP79由于各种原因,卫星遥感图像在遥感图像的生成过程中会产生一定的畸变,有三个原因:首先,对于卫星遥感器本身[1]:卫星遥感器本身的问题,使图像的几何畸变发生,这种问题有很多源头,比如,由于速度引起的扫描速度偏差,扫描镜自身的误差等,这些原因,都会造成图片产生变化,从而产生误差。
其次是卫星原因[2]:由于卫星一直绕地球在椭球轨道上转动,因此卫星的运行快慢以及卫星的高低都会不停地发生变化,除此之外,卫星的姿态也会发生一定改变,就是这些使得图像发生畸变。
最后是地球本身的原因:地球本身与图像成像有很大的关系。
其中,最主要的原因有地球的曲率、地球的自转、地形的起伏变化等[3]。
卫星接收图像都是在轨道运行降阶,简而言之,地球自西面向东面自转,而卫星绕地球从北端向南端运动[4]。
这种相对运动造成了卫星的星下位置偏移,这种偏移就使图像产生了畸变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。