基于MATLAB的图像复原与重建设计说明
Matlab中的图像修复与图像修复方法

Matlab中的图像修复与图像修复方法随着数字图像处理技术的发展,图像修复在许多领域中变得日益重要。
图像修复是指通过采用合适的方法和技术,对损坏或缺失的图像进行恢复或修复的过程。
在Matlab中,有许多强大的图像修复工具和算法,本文将介绍其中一些常用的图像修复方法。
一、图像修复的概览图像修复是通过恢复或修复缺失或损坏的图像信息,使图像更加完整和清晰。
在现实应用中,图像修复可以用于修复老照片、复古图片,恢复受损图像,去除图像噪声等。
图像修复方法可以分为基于模型的方法和基于数据的方法。
二、基于模型的图像修复基于模型的图像修复方法使用数学模型来描述图像的生成过程,并利用模型的统计规律来实现图像修复。
最著名的基于模型的图像修复方法之一是以全变分(Total Variation,TV)为基础的方法。
全变分是一种描述图像边缘信息的数学概念,基于全变分的方法能够恢复图像的边缘信息。
通过最小化全变分正则项以及数据项的残差,可以得到修复后的图像。
另一个常用的基于模型的图像修复方法是基于稀疏表示的方法。
稀疏表示假设图像可以用少量的原子基表示,并通过最小化稀疏编码的残差来恢复图像。
通过合理选择字典和稀疏编码算法,可以有效地恢复缺失或损坏的图像信息。
三、基于数据的图像修复基于数据的图像修复方法侧重于利用已知信息来恢复图像。
其中一个常见的方法是基于图像插值的方法。
插值是一种通过已知的图像像素值来估计缺失像素值的方法。
在Matlab中,有许多插值算法,如双线性插值、双三次插值等。
通过选择适当的插值算法和参数,可以得到较为准确的图像修复结果。
另一个常见的基于数据的图像修复方法是基于同类图像的方法,也称为图像纹理填充。
该方法通过利用图像中已有的纹理信息来填充缺失的部分。
这样可以保持图像的一致性和连续性,使得修复后的图像与原图像更加自然。
四、Matlab中常用的图像修复工具在Matlab中,有许多内置函数和工具箱可以用于图像修复。
MATLAB技术图像重建教程
MATLAB技术图像重建教程引言:图像重建是数学、计算机视觉和信号处理领域的重要研究课题。
通过图像重建技术,我们可以恢复损坏、失真或者低分辨率的图像,使其更加清晰和易于理解。
本文将介绍利用MATLAB技术进行图像重建的方法和步骤,旨在帮助读者更好地掌握和应用这一领域的知识。
一、图像重建的基本原理图像重建的基本原理是通过数学模型和算法对图像进行处理,使其在保留重建图像中的重要信息的同时,去除噪声和失真等因素的干扰。
常用的图像重建方法有插值、去噪和超分辨率重建等。
这些方法可以单独应用,也可以结合使用,以达到更好的重建效果。
二、利用MATLAB进行图像插值图像插值是图像重建中最简单且常用的方法之一。
它通过推测丢失或某些像素无法采集到的图像信息,从而填补图像中的空白区域。
在MATLAB中,我们可以使用interp2函数进行图像插值。
该函数通过利用已知像素点之间的关系,预测未知像素点的数值,并在图像上进行补全。
我们可以通过程序代码指定插值方法和参数,以获得不同的插值效果。
三、利用MATLAB进行图像去噪图像去噪是提高图像质量和清晰度的重要步骤。
图像中的噪声可能来自于图片采集过程中的干扰,也可能是由于传输、储存等环节引起的噪声。
MATLAB提供了多种方法和工具,可以帮助我们去除这些噪声。
常用的图像去噪方法包括均值滤波、中值滤波、小波去噪等。
在使用这些方法时,我们需要根据图像噪声的特点和要求选择合适的去噪方法,并对其参数进行调整。
通过不断尝试和实践,我们可以找到最佳的去噪效果。
四、利用MATLAB进行图像超分辨率重建超分辨率重建是图像处理中的一项高级技术。
它通过利用图像特征和纹理信息,将低分辨率图像转换为高分辨率图像。
MATLAB中的图像超分辨率重建工具箱可以帮助我们实现这一目标。
这个工具箱提供了一系列的函数和算法,包括基于插值的超分辨率重建方法、基于深度学习的超分辨率重建方法等。
我们可以根据图像的特点和需求选择合适的方法,并通过调整参数和优化算法来获得最佳的超分辨率重建结果。
在Matlab中进行图像重建和图像恢复的技术

在Matlab中进行图像重建和图像恢复的技术图像重建和图像恢复是数字图像处理领域的重要研究方向。
在Matlab这一强大的工具中,提供了丰富的图像处理函数和算法,使得图像重建和恢复变得更加高效和精确。
本文将介绍在Matlab中进行图像重建和图像恢复的一些常用技术。
一、图像重建的概念和方法图像重建指的是从已损坏或丢失部分信息的图像中恢复出尽可能完整的图像。
常见的图像损坏包括噪声、模糊以及缺失等。
在图像重建中,常用的方法包括逆滤波、维纳滤波、最小二乘法等。
1. 逆滤波逆滤波是一种常见的图像重建方法,其思想是通过求解逆滤波算子来反转图像损坏过程,以实现图像的重建。
在Matlab中,可以使用fft2函数将图像转换到频域进行处理,然后使用ifft2函数将图像转回到空域。
2. 维纳滤波维纳滤波是一种优化的图像重建方法,它考虑了噪声对图像重建的影响。
在Matlab中,可以使用维纳滤波函数wiener2对图像进行恢复。
该函数可以根据图像的噪声方差和信噪比自动调整滤波参数,使得图像的重建效果更好。
3. 最小二乘法最小二乘法也是一种常用的图像重建方法,它通过优化目标函数来求解最优重建结果。
在Matlab中,可以使用lsqnonneg函数进行最小二乘法拟合。
该函数能够在给定约束条件下求解非负解,并适用于一些不完全观测的图像重建问题。
二、图像恢复的概念和方法图像恢复是指在已损坏或丢失部分信息的图像中重建出尽可能高质量的图像。
与图像重建不同,图像恢复更加关注图像质量的提升。
常见的图像损坏包括噪声、模糊以及失真等。
在Matlab中,提供了很多图像恢复的函数和算法,如图像增强、去噪以及去模糊等。
1. 图像增强图像增强是一种常用的图像恢复方法,其目的是使图像在视觉上更加清晰、丰富和易于分析。
在Matlab中,可以使用imadjust函数对图像进行亮度和对比度调整,以达到图像增强的效果。
此外,还可以使用imsharpen函数对图像进行锐化处理,以提高图像的清晰度。
基于MATLAB的图像复原技术
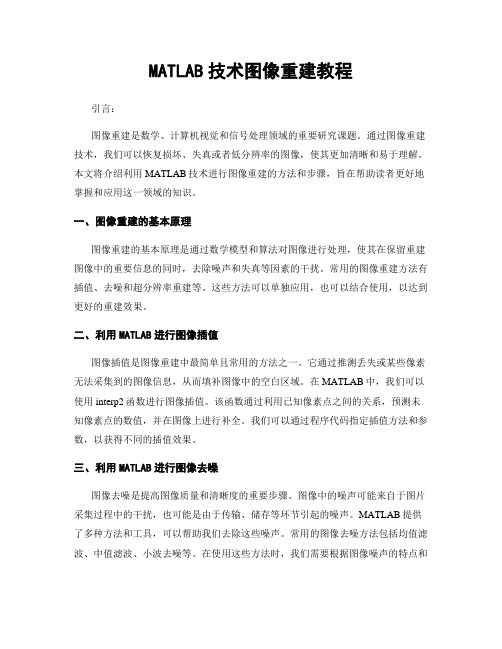
对图像通过运动产生模糊效果:>> i=imread('cameraman.tif');>> subplot(1,2,1);imshow(i);>> len=35;>> th=45;>> psf=fspecial('motion',len,th);>> mf=imfilter(i,psf,'circular','conv');>> subplot(1,2,2);imshow(mf);>> imwrite(mf,'mhfj.jpg');对创建的棋盘图像进行盲卷积处理:>> i=checkerboard(8);>> PSF=fspecial('gaussian',7,10);>> V=.0001;>> bl=imnoise(imfilter(i,PSF),'gaussian',0,V);>> wt=zeros(size(i));>> wt(5:end-4,5:end-4)=1;>> INITPSF=ones(size(PSF));>> [J P]=deconvblind(bl,INITPSF,20,10*sqrt(V),wt); >> subplot(2,2,1);imshow(bl);>> subplot(2,2,2);imshow(PSF,[]);>> subplot(2,2,3);imshow(J);>> subplot(2,2,4);imshow(P,[]);使用维纳滤波器进行图像复原:>> i=imread('cameraman.tif');>> i=im2double(i);>> subplot(5,2,1);imshow(i);>> len=21;>> th=11;>> psf=fspecial('motion',len,th);>> bl=imfilter(i,psf,'conv','circular');>> subplot(5,2,2);imshow(bl);>> wnr1=deconvwnr(bl,psf,0);>> subplot(5,2,3);imshow(wnr1);>> wnr2=deconvwnr(bl,fspecial('motion',2*len,th)); >> subplot(5,2,4);imshow(wnr2);>> wnr3=deconvwnr(bl,fspecial('motion',len,2.5*th)); >> subplot(5,2,5);imshow(wnr3);>> noise_mean=0;>> noise_var=0.0001;>> bl_n=imnoise(bl,'gaussian',noise_mean,noise_var); >> subplot(5,2,6);imshow(bl_n);>> wnr4=deconvwnr(bl_n,psf,0);>> subplot(5,2,7);imshow(wnr4);>> s_var=var(i(:));>> wnr5=deconvwnr(bl_n,psf,noise_var/s_var);>> subplot(5,2,8);imshow(wnr5);>> bl_q=imfilter(i,psf,'conv','circular');>> wnr6=deconvwnr(wnr5,psf,0);>> subplot(5,2,9);imshow(wnr6);>> u_q_var=(1/256)^2/12;>> s_var=var(im2double(i(:)));>> wnr7=deconvwnr(bl_q,psf,u_q_var/s_var); >> subplot(5,2,10);imshow(wnr7);使用约束最小二乘滤波器复原图像:>> i=imread('tissue.png');>> i=i(125+[1:256],1:256,:);>> figure;imshow(i);>> psf=fspecial('gaussian',11,5);>> bl=imfilter(i,psf,'conv');>> figure;imshow(bl);>> psf=fspecial('gaussian',11,5); >> bl=imfilter(i,psf,'conv');>> figure;imshow(bl);。
Matlab中的模糊图像恢复与图像重建技术详解

Matlab中的模糊图像恢复与图像重建技术详解引言:随着数码相机、移动设备以及各种图像处理软件的普及,人们对图像质量要求越来越高。
然而,在图像获取和传输过程中,由于种种原因,图像可能会变得模糊,失真或损坏。
为了解决这些问题,图像恢复和重建技术应运而生。
本文将详细介绍基于Matlab的模糊图像恢复与图像重建技术。
一、图像模糊恢复技术1. 模糊图像的概念和原因模糊图像是指由于摄像机移动、图像采集设备问题、环境光线等因素而导致图像失真的现象。
图像模糊会降低图像的细节和清晰度,使得图像难以辨认和识别。
常见的模糊原因有运动模糊、焦距模糊、镜头畸变等。
2. 模糊图像恢复方法为了恢复模糊图像的清晰度和细节,研究人员提出了各种方法。
其中,基于傅里叶变换的频域滤波是最常用的方法之一。
该方法通过将模糊图像转换到频域,应用适当的频域滤波器来消除模糊效果。
Matlab提供了丰富的函数和工具箱来实现这些滤波方法,比如利用低通滤波器恢复运动模糊图像。
另外,基于对图像恢复的数学建模和优化算法也是常用的方法。
例如,最小二乘法、最小化总变差等。
3. Matlab中的模糊图像恢复函数Matlab提供了多种函数用于模糊图像恢复。
其中,`deconvwnr`函数可以用于模糊图像的逆滤波处理。
该函数通过对图像进行频域滤波,去除模糊效果。
另外,`deconvblind`函数可以用于盲去卷积处理,即对图像进行反卷积操作以恢复图像细节。
二、图像重建技术1. 图像重建的意义和应用图像重建指的是利用已有的图像信息来还原、修复或生成新的图像。
与图像恢复类似,图像重建技术对于改善图像质量、还原损坏图像、生成虚拟图像等方面有着重要的应用。
图像重建技术在医学影像、图像压缩和增强、虚拟现实等领域都有广泛的应用。
2. 图像重建算法在Matlab中,图像重建可以通过多种算法实现。
其中一种常用的算法是基于插值的图像重建方法。
该方法通过对已有图像的像素进行插值来生成新的图像。
基于MATLAB图像复原论文
学号:基于MATLAB的离焦模糊图像复原学院名称:计算机与信息技术学院专业名称:通信工程年级班别:2008级1班姓名:指导教师:2012年5月基于MATLAB的离焦模糊图像复原摘要图像在获取、传输和存储过程中会受到如模糊、失真、噪声等原因的影响,这些原因会使图像的质量下降。
因此,我们需要采取一定的方法尽可能地减少或消除图像质量的下降,恢复图像的本来面目,这称为图像复原。
通过阅读图像复原技术相关资料,本文主要探讨了维纳(Wiener)滤波、约束最小二乘滤波算法、Lucy-Richardson算法和盲解卷积算法,并使用相关的工具箱函数deconvwnr函数、deconvreg函数、deconvlucy函数、deconvblind函数进行仿真。
另外本文对上述算法进行了仿真实现,并分析了四种算法的实验结果。
关键词图像复原;维纳滤波恢复;约束最小二乘滤波恢复;Lucy-Richardson恢复;盲解卷积恢复Based on the MATLAB of defocus blurred image restorationAbstract Image in the acquisition, transmission and storage process will be subject to such as blurring, distortion, noise and other reasons, these reasons will make the image quality degradation.Therefore, we needed to take a certain amount of ways to reduce or eliminate image quality to fall, to restore the image of self, this is known as image restoration. By reading the image restoration technology related data. This paper mainly discusses the Wiener filter, constrained least squares filtering algorithm, Lucy-Richardson algorithm and blind deconvolution algorithm,and the deconvwnr function,the deconvreg function ,the deconvlucy function and the deconvblind function are used for emulation.This article on the above algorithm to simulation and experimental result analysis of four kinds of algorithms.Keywords image restoration; Wiener filtering restore; Constrained least squares filtering restore; Lucy-Richardson recovery; Blind solution convolution recovery目录1 图像退化/复原处理的模型 (1)2 噪声的特征 (2)3噪声的分类 (3)4直接逆滤波 (4)5维纳滤波 (5)6 约束的最小二乘方滤波 (7)7 使用Lucy-Richardson算法的迭代非线性复原 (9)8 盲去卷积 (11)总结 (12)参考文献 (13)致谢 (14)前言在实际的日常生活中,人们要接触很多图像,画面。
Matlab中的图像重建与图像恢复技术
Matlab中的图像重建与图像恢复技术深入研究和掌握图像重建与图像恢复技术对于图像处理和计算机视觉领域的研究人员来说至关重要。
在现实生活中,图像可能因传感器噪声、数据传输损失或其他因素而受损,导致图像出现模糊、噪声等问题。
为了改善这些问题,我们需要使用图像重建和恢复技术,将受损的图像还原到原始清晰的状态。
Matlab作为一种功能强大的科学计算软件,提供了丰富的工具和函数,可以帮助我们实现图像重建和恢复的任务。
在本文中,我们将探讨几种常用的图像重建和恢复技术,并介绍如何使用Matlab来实现它们。
第一部分:图像去噪与平滑图像中的噪声往往是由电子设备、图像采集过程或传输过程中引入的。
去除这些噪声对于提高图像质量非常重要。
在Matlab中,我们可以使用均值滤波、中值滤波、高斯滤波等方法进行图像去噪和平滑。
均值滤波是一种常用的线性滤波方法,它通过计算图像周围像素的平均值来减小噪声。
中值滤波则取邻域像素的中值作为当前像素的值,可以有效地去除脉冲噪声和椒盐噪声。
高斯滤波则使用高斯核函数对图像进行平滑,可以在平滑图像的同时保留图像的细节信息。
第二部分:图像复原与去模糊当图像受到模糊因素的影响时,如相机抖动、运动模糊等,我们可以使用图像复原和去模糊技术来提高图像的清晰度。
在Matlab中,我们可以使用逆滤波、维纳滤波等方法进行图像复原和去模糊。
逆滤波是一种经典的图像复原方法,通过将图像的频谱进行逆变换,消除因模糊而引入的相位延迟和衰减。
然而,逆滤波在存在噪声的情况下容易引入放大噪声的问题。
为了解决这个问题,可以使用维纳滤波器,它通过权衡图像信号和噪声的功率谱来恢复原始图像。
第三部分:图像超分辨率重建超分辨率重建是一种在低分辨率图像的基础上提高图像分辨率的技术。
它在很多应用中都非常有用,如视频监控、医学图像分析等。
在Matlab中,我们可以使用插值方法、重建方法等技术进行图像超分辨率重建。
插值方法是一种常用的图像超分辨率技术,它通过对像素进行重新采样来增加图像的分辨率。
利用Matlab进行图像超分辨率重建和图像修复
利用Matlab进行图像超分辨率重建和图像修复图像是我们生活中不可或缺的一部分,无论是个人照片、电影剧照还是科学研究数据,图像都扮演着重要的角色。
然而,由于传感器设备的限制或者图像损坏等原因,我们经常会遇到图像分辨率不足或者损坏的情况。
在这种情况下,利用Matlab进行图像超分辨率重建和图像修复成为了一种常见的解决方案。
图像超分辨率重建是指通过利用图像中存在的空间信息,从低分辨率图像中恢复出高分辨率的图像。
在传统的方法中,通常采用插值算法来进行超分辨率重建,但这种方法往往会导致图像细节丢失和模糊。
为了解决这一问题,基于深度学习的超分辨率重建方法逐渐兴起。
在Matlab中,我们可以利用深度学习工具箱中的预训练模型或者自己训练神经网络模型来进行图像超分辨率重建。
首先,我们可以使用Matlab提供的函数加载已经训练好的模型,然后将低分辨率的图像输入到模型中进行预测,最后得到重建后的高分辨率图像。
这种方法通过学习大量的图像样本来提高图像重建的准确度和细节保留效果。
与图像超分辨率重建类似,图像修复也是一种常见的图像处理技术。
图像修复的目标是恢复损坏或者有噪声的图像,使其尽可能接近原始图像。
在Matlab中,我们可以通过各种滤波器、噪声模型和图像处理算法来实现图像修复。
首先,我们可以利用Matlab中的滤波器函数对图像进行去噪处理。
滤波器是一种通过消除图像中的噪声来提高图像质量的方法。
在Matlab中,我们可以使用均值滤波器、中值滤波器、高斯滤波器等滤波器函数来去除图像中的不同类型的噪声。
其次,我们可以利用Matlab中的图像修复算法来修复图像中的损坏部分。
图像修复算法通常是基于局部像素相似性原理来进行的。
例如,图像补偿算法利用图像中的相似区域来填充缺失的像素值,修复图像中的空洞。
Matlab中提供了一些图像修复算法的函数,如基于纹理合成的修复算法和基于偏微分方程的修复算法等。
此外,利用Matlab进行图像修复还可以使用图像插值和图像重建的方法。
基于MATLAB的图像复原
基于MATLAB的图像复原摘要随着信息技术的发展,数字图像像已经充斥着人们身边的任意一个角落。
由于图像的传送、转换,或者其他原因,可能会造成图像的降质、模糊、变形、质量下降、失真或者其他情况的图像的受损。
本设计就针对“图像受损”的问题,在MATLAB环境中实现了利用几何失真校正方法来恢复被损坏的图像。
几何失真校正要处理的则是在处理的过程,由于成像系统的非线性,成像后的图像与原图像相比,会产生比例失调,甚至扭曲的图像。
图像复原从理论到实际的操作的实现,不仅能改善图片的视觉效果和保真程度,还有利于后续的图片处理,这对医疗摄像、文物复原、视频监控等领域都具有很重要的意义。
关键字:图像复原;MATLAB;几何失真校正目录1 MA TLAB 6.x信号处理 02 图像复原的方法及其应用 (12)2.1 图像复原的方法 (12)2.2 图像复原的应用 (13)3 几何失真校正实现 (14)3.1 空间变换 (14)3.1.1 已知()y x r,和()y x s,条件下的几何校正 (15)3.1.2 ()y x r,和()y x s,未知条件下的几何失真 (15)3.2 灰度插值 (16)3.3 结果分析 (18)参考文献 (19)附录 (20)1 MATLAB 6.x信号处理(1)对MATLAB 6 进行了简介,包括程序设计环境、基本操作、绘图功能、M文件以及MATLAB 6 的稀疏矩阵这五个部分。
MATLAB的工作环境有命令窗口、启动平台、工作空间、命令历史记录与当前路径窗口这四部分。
M文件的编辑调试环境有四个部分的设置,分别是:Editor/Debugger的参数设置,字体与颜色的设置,显示方式的设置,键盘与缩进的设置。
MATLAB采用路径搜索的方法来查找文件系统的M文件,常用的命令文件组在MATLAB文件夹中,其他M文件组在各种工具箱中。
基本操作主要是对一些常用的基本常识、矩阵运算及分解、数据分析与统计这三方面进行阐述。
如何利用Matlab进行图像恢复

如何利用Matlab进行图像恢复图像恢复是数字图像处理中的一个重要的研究领域。
Matlab作为一种功能强大的工具,被广泛应用于图像处理领域。
本文将介绍如何利用Matlab进行图像恢复,并探讨其中的原理和算法。
首先,图像恢复是一种通过消除或减小图像失真、模糊或噪声等问题,使图像更加清晰和还原的过程。
在实际应用中,图像常常受到噪声污染、运动模糊、光照变化等影响,导致图像质量下降。
利用图像恢复技术,可以提高图像的视觉质量和辨识度,对于图像处理、计算机视觉等领域具有重要意义。
Matlab作为一款高级的数学计算工具,提供了丰富的函数库和灵活的编程接口,能够方便地进行图像处理和分析。
在图像恢复中,Matlab提供了多种处理图像的函数和算法,可以帮助我们实现各种图像恢复的方法。
一种常用的图像恢复方法是基于空域滤波的处理。
在Matlab中,可以使用imfilter函数来实现各种空域滤波算法,如均值滤波、中值滤波、高斯滤波等。
这些滤波算法通过在图像像素之间进行加权平均或统计操作,可以消除图像中的噪声和模糊。
另一种常用的图像恢复方法是基于频域滤波的处理。
在Matlab中,可以使用fft2函数和ifft2函数来实现图像的傅里叶变换和反傅里叶变换。
通过将图像从空域转换到频域,可以利用频域滤波算法对图像进行处理,如理想低通滤波、巴特沃斯低通滤波、维纳滤波等。
这些滤波算法可以根据图像的频域特征,有选择地增强或抑制图像中的某些频率分量,从而实现图像的恢复。
此外,Matlab还提供了一些专门用于图像恢复的函数,如wiener2函数、deconvwnr函数等。
wiener2函数实现了维纳滤波算法,可以用于消除运动模糊或加性噪声的图像恢复。
deconvwnr函数实现了维纳滤波的变种算法,可以根据图像和模糊函数的噪声特性,自适应地调整滤波参数,从而实现更好的图像恢复效果。
除了上述方法,Matlab还提供了其他一些高级的图像恢复算法,如超分辨率恢复、图像拼接等。
如何在Matlab中进行图像重建

如何在Matlab中进行图像重建Matlab是一种强大的科学计算软件,它提供了丰富的工具和函数来进行图像处理和分析。
图像重建是一个重要的应用领域,它涉及将损坏或模糊的图像恢复到其原始清晰状态。
在本文中,将探讨如何在Matlab中进行图像重建的方法和技术。
首先,图像重建的第一步是了解图像的特性和问题。
不同类型的损坏会导致不同的图像恢复方法。
一种常见的图像恢复问题是模糊,它会使得图像失去清晰度。
针对这个问题,常用的方法是图像去模糊。
Matlab提供了一些内置的函数来处理模糊问题,如fspecial和deconvwnr。
其次,了解图像重建的数学模型是至关重要的。
图像重建可以被视为一个逆问题,即从损坏的图像中恢复未知原始图像。
数学模型描述了这种逆问题的关系。
常见的图像重建模型有基于最小二乘法的正则化方法和基于变分法的方法。
Matlab提供了丰富的工具和函数来解决这些数学模型,如imresize,imfilter和imadjust。
第三,图像重建涉及到图像处理的一系列步骤,如预处理、特征提取和后处理。
预处理阶段通常包括图像去噪和图像增强。
Matlab提供了多种去噪和增强的方法和函数,如medfilt2和histeq。
特征提取是图像重建中的关键步骤,它涉及到从图像中提取有用的信息和特征。
Matlab提供了一些强大的特征提取函数,如corner和Harris。
后处理是指在重建图像后对其进行进一步处理和优化。
Matlab提供了一些后处理函数,如imadjust和imsharpen。
在进行图像重建时,选择合适的算法和技术也是非常重要的。
图像重建的选择应根据具体的问题和需求。
有些问题可能需要运用机器学习和深度学习的方法,而有些问题可能需要运用传统的数值和优化方法。
Matlab提供了大量的工具和函数来支持各种算法和技术,如神经网络工具箱和优化工具箱。
最后,图像重建还需要进行性能评估和调优。
性能评估可以通过比较重建图像与原始图像之间的差异来实现。
MATLAB中的图像配准和重建技巧
MATLAB中的图像配准和重建技巧在当今科技高速发展的时代,图像处理已经成为了计算机视觉和计算机图形学的重要组成部分。
而在图像处理的实践中,图像配准和重建技巧扮演着至关重要的角色。
本文将着重介绍MATLAB(一种常用的科学计算软件)中的图像配准和重建技巧,并详细阐述其应用和实现方法。
一、图像配准技巧图像配准是将多幅图像进行几何对齐的过程,即通过变换操作来确保多幅图像具有相同的尺度和位置。
常见的应用场景包括医学影像、航空摄影和遥感图像等。
MATLAB提供了多种图像配准的工具箱和函数,可以方便地实现这一过程。
1. 基于特征点的配准方法特征点是图像中具有独特信息的像素点,其在不同图像中的对应关系可以用于配准。
在使用MATLAB实现时,可以使用SIFT(尺度不变特征变换)或SURF (加速稳健特征)等算法来提取图像中的特征点,并通过特征匹配算法(例如RANSAC)来求解不同图像之间的变换关系。
2. 基于相位相关的配准方法相位相关法是通过计算两幅图像的频域信息来进行配准的方法。
在MATLAB 中,可以使用傅里叶变换函数fft2和ifft2来获取图像的频谱信息,并通过计算互相关来获得相位相关系数。
最终通过最大相关系数的位置来确定图像的配准位置。
3. 基于互信息的配准方法互信息是衡量两个随机变量相互依赖程度的指标,也可以用于图像配准中。
在MATLAB中,可以通过计算归一化互信息(NMI)来度量图像之间的相似性。
通过最小化互信息的负值来最大化配准的准确性。
二、图像重建技巧图像重建是通过已有的图像或图像片段来恢复原始图像的过程。
常见的应用场景包括图像修复、图像增强和图像插值等。
MATLAB提供了多种图像重建的函数和工具箱,可以方便地实现这一过程。
1. 基于插值的重建方法插值是通过已知数据点来推断未知位置的数值的方法,在图像处理中常用于图像缩放和图像修复。
MATLAB中的interp2函数可以通过不同的插值方法(如最近邻插值、双线性插值、双三次插值)来实现图像重建。
Matlab在图像恢复与修复中的应用技巧
Matlab在图像恢复与修复中的应用技巧随着数字图像的广泛应用,图像恢复与修复成为了计算机视觉领域中的重要课题。
而Matlab作为一种强大的数学计算软件,其图像处理工具箱提供了丰富的函数和工具,为图像恢复与修复提供了很大的帮助。
本文将介绍几种常见的Matlab应用技巧,帮助读者更好地进行图像恢复与修复的研究和实践。
一、图像去噪在图像恢复与修复中,去噪是一个基础而重要的步骤。
Matlab提供了一系列的去噪函数,其中最常用的就是经典的小波去噪方法。
通过小波变换,我们能够将图像分解为不同尺度的频带,进而对每个频带的小波系数进行阈值处理从而实现去噪。
通过调整阈值的大小,我们能够达到不同的去噪效果。
同时,我们还可以将小波变换与其他去噪方法相结合,比如均值滤波或中值滤波,以进一步提高去噪效果。
另外,Matlab还提供了一些基于图像统计特性的去噪方法,比如非局部均值去噪算法(Non-local Means Denoising)。
该算法通过利用图像中相似块的信息,对每个像素进行加权平均,从而实现去噪。
通过调整相似块的搜索窗口大小和相似度的阈值,我们可以控制去噪的效果,并在保持图像细节的同时去除噪声。
二、图像修复除了去噪,图像修复也是图像恢复与修复领域的重要任务之一。
Matlab提供了多种修复算法和函数,如基于偏微分方程的图像修复方法、基于局部信息的修复方法等。
其中,基于偏微分方程的图像修复方法可以通过求解非线性偏微分方程来实现图像恢复。
具体而言,该方法将图像看作是一个层次结构,通过对不同层次的图像进行偏微分运算,进而实现图像的修复。
常见的偏微分方程模型有扩散方程、曲线方程等,通过调整不同模型的参数,可以得到不同的修复效果。
另外,基于局部信息的修复方法利用局部纹理或结构信息进行图像修复。
在Matlab中,我们可以使用快速哈尔小波变换(Fast Haar Wavelet Transform)来提取图像的纹理特征,然后根据纹理特征进行图像修复。
数字图像处理(基于Matlab)图像复原
《数字图像处理》实验报告一、实验目的(不少于200字) 本次实验进行的主要是对图像复原进行有关讨论。
在图像形成过程中,由于成像系统等各种外部因素的影响,可能导致图像的质量下降,发生所谓的“图像退化”。
与图像增强相类似,图像复原的目的是改善图像的质量,便于人眼辨识,增强表达效果。
在进行图像复原的过程中,必要的先验知识十分重要,可以非常方便的将已退化的图像恢复本来的面目,但是有些时候图像的先验知识我们并不容易获取,所以与此相对应有盲卷积等方法来帮助我们进行图像复原。
引起图像退化的因素很多,包括有光学系统、运动等造成的图像模糊,电路传递中、光学因素的影响噪声等等。
掌握了解相关的数学模型对于图像复原至关重要,许多复原的方法也是建立在比较严格的数学推导上的。
通过本次实验,主要期望达到以下目的:1、熟练掌握数字图像复原的基本概念和基本理论原理2、深入理解图像退化的影响原因和对应的处理方法,加强综合分析问题、解决实际问题的能力3、掌握各种使用的图像复原的相关技术,使经处理后的图像更加适应人眼的视觉与心理4、巩固使用 matlab 软件处理数字图像问题的能力,加强巩固编程能力通过实验,了解到图像恢复和图像增强的区别还在于图像增强不考虑图像时如何退化的,而是试图采用各种技术来增强图像的视觉效果,因此图像增强可以不顾增强后的图像是否失真,只要看着舒服就基本可以满足要求,而图像复原则对图像退化的机制和过程邓先验知识要求较为必要,很多情况下先验知识如果全面准确,甚至可以完全恢复原始图像,达到非常好的效果,据此找出相应的你处理方法,从而得到恢复的图像。
对于一幅图像,可以先进行复原处理,在进行图像增强处理,两者相互结合,图像的效果可以达到更为理想的效果。
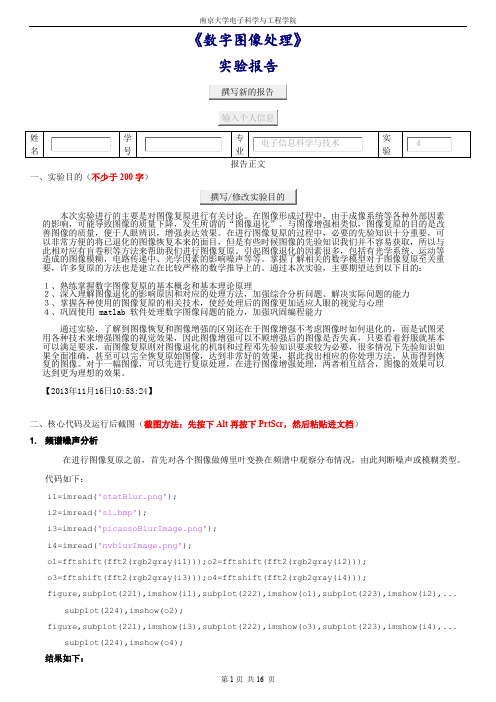
【2013年11月16日10:53:24】二、核心代码及运行后截图(截图方法:先按下Alt再按下PrtScr,然后粘贴进文档)1.频谱噪声分析在进行图像复原之前,首先对各个图像做傅里叶变换在频谱中观察分布情况,由此判断噪声或模糊类型。
Matlab技术在图像恢复与重建中的应用案例
Matlab技术在图像恢复与重建中的应用案例图像恢复与重建是数字图像处理领域的一个重要研究方向,其在许多领域中发挥着重要作用,如医学影像、视频传输和无损压缩等。
而Matlab作为一种强大的科学计算和图像处理工具,在图像恢复与重建中有着广泛的应用。
本文将介绍一些Matlab技术在图像恢复与重建中的应用案例,并探讨其优势和局限性。
一、图像去噪图像去噪是图像恢复的一个基本问题,目的是去除图像中的噪声,使图像更加清晰。
在Matlab中,可以利用各种滤波算法来实现图像去噪。
其中,最常用的是线性滤波算法和非线性滤波算法。
线性滤波算法根据图像像素的线性组合来实现去噪。
常见的线性滤波算法有均值滤波、中值滤波和高斯滤波等。
例如,可以使用Matlab中的imfilter函数结合适当的滤波模板来进行图像去噪。
这些线性滤波算法简单易懂,计算速度快,但对于复杂噪声或者噪声与图像信号相似的情况下,效果可能不理想。
非线性滤波算法则根据局部像素之间的相似性来实现去噪。
常见的非线性滤波算法有中值滤波、双边滤波和小波去噪等。
例如,可以利用Matlab中的medfilt2函数来进行中值滤波去噪。
这些非线性滤波算法对于保持图像边缘和纹理等细节信息有较好的效果,但计算复杂度较高。
二、图像修复图像修复是指在图像中恢复缺失、损坏或受到干扰的部分,以还原原始图像的过程。
在Matlab中,可以利用各种图像恢复技术来实现图像修复。
其中,最常用的是基于插值的图像修复算法和基于变分的图像修复算法。
基于插值的图像修复算法是指根据已知像素的值,通过插值方法来估计未知像素的值。
常见的插值方法有最近邻插值、双线性插值和双立方插值等。
例如,可以利用Matlab中的interp2函数来进行图像的插值修复。
这些插值算法简单方便,计算速度快,但对于复杂图像结构和纹理等细节的恢复效果可能不理想。
基于变分的图像修复算法则是通过最小化能量函数来实现图像修复。
常见的变分方法有全变分(TV)正则化、局部全变分(LTV)正则化和总变分(TGV)正则化等。
基于MATLAB的图像恢复算法研究要点

中北大学课程设计说明书学生姓名:学号:学生姓名:学号:学生姓名:学号:学院:信息商务学院专业:电子信息工程题目:信息处理综合实践:基于MATLAB的图像恢复算法研究指导教师:职称:年月日中北大学课程设计任务书13/14 学年第一学期学院:信息商务学院专业:电子信息工程学生姓名:学号:学生姓名:学号:学生姓名:学号:课程设计题目:信息处理综合实践:于MATLAB的图像恢复算法研究起迄日期:课程设计地点:电子信息科学与技术专业实验室指导教师:系主任:下达任务书日期: 年月日目录摘要: (6)1.图像复原的概念 (6)1.1图像复原的定义 (6)1.2 图象恢复与图象增强的异同 (6)1.3 图象退化的原因 (6)1.4 维纳滤波的研究历史 (6)1.5图象退化举例 (7)2.退化模型 (8)2.1图象退化模型概述 (8)2.2连续函数退化模型 (8)2.3离散函数退化模型 (8)3.图象复原技术 (9)3.1无约束恢复 (9)3.2逆滤波 (9)3.3 维纳(Wiener)滤波器基本原理 (10)3.4维纳滤波复原法 (11)3.5图像复原例图 (12)4.图像复原的MATLAB实现实例 (13)5.结束语 (14)参考文献: (14)附录: (14)(1).维纳滤波复原源代码: (14)(2).规则化滤波复原程序源代码: (15)(3).Lucy-Richardson复原滤波源代码: (15)(4).盲目去卷积复原源代码: (15)摘要:图像复原是图象处理的一个重要课题。
图像复原也称图象恢复,是图象处理中的一大类技术。
它的主要目的是改善给定的图像质量。
当给定了一幅退化了的或者受到噪声污染了的图像后,利用退化现象的某种先验知识来重建或恢复原有图像是复原处理的基本过程。
可能的退化有光学系统中的衍射,传感器非线性畸变,光学系统的像差,摄影胶片的非线性,大气湍流的扰动效应,图像运动造成的模糊及几何畸变等等。
基于MATLAB的数字图像复原的研究

• 19•在人类传递信息的过程中,图像起到了非常重要作用。
在图像采集和储存设备方面,其种类非常多。
以往,我们多使用传统胶片照相机和摄像机,现在我们能够使用监控视频、行车记录仪以及无人机进行图像的采集和储存。
但是,很多时候,由于摄像头距离观察目标不确定,如果两者距离较远,那么可能会导致获取的图像像素不高的问题。
不仅如此,图像的采集还会受到很多外界环境条件的影响。
例如,夜间灯光光线不强和暴风暴雨天气都会影响到图像的采集。
笔者基于MATLAB,针对数字图像复原进行了相关研究。
在数字图像处理中,模糊图像复原是非常值得研究的一个领域。
特别是最近几年,模糊图像复原在国内外图像研究领域成为一个焦点问题。
关于模糊图像复原的研究成果正在多个研究领域所应用。
但是在进行相关研究的过程中,发现获取图像难以得到高质量保障。
众所周知,在很多时候,获取图像的设备会遇到光学系统像差以及大气扰动和系统噪声等影响。
如此,这些因素会导致图像发生模糊现象,甚至可能出现图像变形的情况。
鉴于此,我们为了提高图像的质量,有必要通过适当的方法,使图像复原,并使图像的质量得到提升。
1 数字图像复原1.1 数字图像成像数字图像:所谓图像,其实质是在光学或者光电材料中所形成的影像。
图像是客观存在的,是物体及其周围景物发出或反射的光线所形成的。
众所周知,图像的种类非常多。
数字图像和模拟图像这两者有一个共同点,那就是都是根据空间坐标和亮度色彩的改变来判断连续进行与否的。
根据图像,可将其定义为二维函数f(x,y),其中x 和y都是空间坐标。
如果对于所有空间坐标,其幅值是有限的和离散的数值。
对于这种离散化,我们称它为数字图像。
视频:视频的本质是通过图像按照时间序列所构成的,当然这些图像是存在一些细小差别的。
对于每一幅图像,其在细节上不完全相同,所以在视觉上会产生暂留现象,这样当连续的图像在以每秒超过24帧进行画面变化的时候,人的眼睛就很难发现其中的变化。
如此,我们在在视觉上看到了平滑的画面效果。
如何使用Matlab技术进行图像恢复

如何使用Matlab技术进行图像恢复引言:随着数字图像处理技术的不断进步,图像的恢复和增强已经成为一项重要的任务,在许多领域都有广泛的应用。
而Matlab作为一种功能强大的数学计算和图形处理软件,被广泛应用于图像恢复领域。
接下来,本文将介绍如何使用Matlab技术进行图像恢复,包括图像去噪、图像增强以及图像修复等方面。
一、图像去噪图像去噪是图像恢复的关键步骤之一,通过去除图像中的噪声可以提高图像的质量和细节表达。
Matlab提供了多种强大的图像去噪算法,如基于小波变换的去噪、基于自适应中值滤波的去噪等。
1. 基于小波变换的去噪小波变换是一种经典的信号处理技术,将信号分解成多个频率范围内的子信号,从而实现对信号的分析和处理。
在Matlab中,可以使用Wavelet Toolbox来进行小波变换去噪。
首先,通过图像的二维小波变换得到图像的小波系数。
然后,根据小波系数的统计特性,选择一个适当的阈值进行小波系数的硬阈值或软阈值处理。
最后,将处理后的小波系数进行反变换,得到去噪后的图像。
2. 基于自适应中值滤波的去噪自适应中值滤波是一种基于排序统计理论的滤波方法,可以有效地去除图像中的椒盐噪声和斑点噪声。
在Matlab中,可以使用medfilt2函数来实现自适应中值滤波。
该函数会自动根据噪声的强度和分布情况,选择合适的窗口大小进行滤波操作。
通过反复迭代,可以逐渐去除图像中的噪声,得到清晰的图像。
二、图像增强图像增强是提高图像视觉效果和信息表达能力的一种方法,常用于改善图像的亮度、对比度、细节等特性。
Matlab提供了丰富的图像增强函数和算法,如直方图均衡化、拉普拉斯金字塔等。
1. 直方图均衡化直方图均衡化是一种常用的图像增强方法,可以通过重新分布图像像素值来增强图像的对比度。
在Matlab中,可以使用histeq函数来实现直方图均衡化。
该函数会自动计算图像的累积直方图,并将像素值映射到一个新的直方图上,从而实现图像的均衡化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前言 (1)1MATLAB的简介 (1)1.1MATLAB的概述 (1)1.2MATLAB的主要功能 (1)1.3MATLAB在图像处理中的应用 (2)2图像复原 (2)2.1 图像复原的基本概念 (2)2.2 图像退化的数学模型 (2)2.3 逆滤波复原 (3)2.4 维纳滤波复原 (4)2.5 使用Lucy-Richardson算法的迭代非线性复原 (6)2.6 盲去卷积 (8)3图像重建 (10)3.1 图像重建的概述 (10)3.2 傅里叶反投影重建 (11)3.3 卷积法重建 (12)3.4 代数重建方法 (15)结论 (16)参考文献 (17)致 (18)数字图像处理是将图像信号转换成数字格式,并通过计算机对它们进行处理。
图像复原过程往往是对提高图像质量起着重要的作用的数字图像处理方法。
图像处理中的一个重要的研究分支是图像重建,其意义在于要检测到获得物体的部结构图像,而不会其造成任何物体上的损伤。
在本文中,先对图像复原与图像重建进行概述,然后介绍几种图像复原技术与图像重建方法。
通过MATLAB实验程序获得实际处理效果。
关键词:图像复原;图像重建;MATLABAbstractDigital image processing is to convert the image signal into a digital format and process them through the computer. Image restoration process is often to improve the image quality, it plays an important role in digital image processing methods. Image reconstruction is an important research branch of image processing, in the sense that the object to be detected to obtain images of internal structures without causing objects any damage. In this article, firstly, it will introduce image restoration and reconstruction principle, and then introduce several image restoration techniques and image reconstruction methods. The finally treatment effect obtained by MATLAB experimental procedures.Key words: image restoration; image reconstruction; MATLAB基于MATLAB的图像复原与重建设计前言随着网络和通信技术的发展,数字图像处理与分析技术已经在科学研究、工业生产、军事技术、医疗卫生、教育等许多领域得到了广泛应用,并产生了巨大的经济效益和社会效益,对推动社会的发展和提高人们生活水平都起到了重要作用[1]。
图像复原与重建是数字图像处理的一个重要组成部分,并已被广泛的应用。
MATLAB图像处理工具为数字图像处理提供了一个稳定、广泛的软件实现平台。
1 MATLAB的简介1.1MATLAB的概述MATLAB是MathWorks公司开发的一款工程数学计算软件。
它是集数值符号计算,高质量图形可视化与界面设计为一体。
由于其功能强大、操作简单,已成为国际上科学界最具影响力、最有活力的软件。
矩阵是MATLAB的基本数据单位,它的指令表达式与数学、工程中常用的形式十分相似,故用MATLAB来解决问题事件比用CFORTRAN等语言简捷方便得多。
MATLAB包括拥有数百个部函数的主包和三十几种工具包(Toolbox)。
工具包又可以分为功能性工具包和科学工具包[12]。
功能性工具包用来扩充MATLAB的符号计算,可视化建模仿真,文字处理及实时控制等功能;科学工具包是专业性比较强的工具包,它包括控制工具包、通信工具包、信号处理工具包 [9]。
MATLAB的开放性广受用户欢迎,除去部函数,MATLAB的所有主包文件和各种工具包都是可读并可以修改的文件,通过对源程序的修改或添加,用户可以构造自己的专用工具包。
1.2MATLAB的主要功能MATLAB是一种用高级技术计算语言和交互式环境,它集算法开发、数值计算、数据分析以及数据可视化为一体。
有了它,比用传统的编程语言,如C、C++等,更快的解决技术计算问题。
MATLAB高级语言可以用于技术计算;它所形成的开发环境可管理代码、文件和数据;数学函数可用于线性代数、概率统计、傅里叶分析变换、优化、筛选以及积分等;二维和三维图形函数可用于可视化数据;各种工具可用于构建自定义的图形用户界面;各种函数可将基于MATLAB的算法与外部应用程序和语言;它具有非常广泛的应用,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。
1.3 MATLAB在图像处理中的应用一系列支持图像处理操作的函数可以组成图像处理工具。
它所支持的图像处理操作有:图像的邻域操作、图像的区域操作、图像的几何操作、图像变换、图像恢复、图像增强,图像复原、图像重建、线性滤波、图像分析和统计等。
下面就MATLAB在图像处理中各方面的应用分别进行介绍[6]。
(1)读写和显示数字图像的文件格式。
imread()为图像文件读入函数,可以用来读取如:bmp、tif、gif、jpg、png、xwd等格式图像;imwrite()为图像写出函数,而imshow()、image()为图像显示函数。
(2)图像处理的基本运算。
加、减等线性运算,卷积、相关、等非线性运算都是MATLAB提供图像处理的基本运算。
例如,conv2(X,Y)实现了X,Y两幅图像的卷积。
(3)图像变换。
MATLAB提供了离散傅里叶变换(DFT)、快速傅里叶变换(FFT)、离散余弦变换(DCT),连续小波变换(CWT)、离散小波变换(DWT)及其反变换等变换。
(4)图像的分析与图像增强。
校正、直方图均衡、中值滤波等都是MATLAB提供的关于图像统计的计算。
(5)图像复原与重建。
可用逆滤波复原、维纳滤波复原等方法实现图像复原。
傅里叶反投影重建、卷积法重建、代数法重建是常用的图像重建技术。
2图像复原2.1图像复原的基本概念图像在形成、传输和记录过程中,由于受到多种原因的影响,图像的质量就会有所下降,典型的表现为图像模糊、失真、有噪声等,这一过程称为图像的退化[5]。
图像复原是试图利用退化过程的先验知识使已退化的图像恢复本来面目,即根据退化的原因,分析引起退化的环境因素,建立相应的数学模型,并沿着使图像降质的逆过程恢复图像[5]。
目的在于消除或减轻在图像获取以及传输的过程中造成的图像品质下降,恢复图像的本来面目。
因此,复原技术就是把退化模型化,并采用相反的过程进行处理,以便尽可能复原被退化图像的本来面目。
广义上讲,图像复原是一个求逆问题,逆问题经常存在非唯一解,甚至无解。
要想恢复全真的景物图像比较困难。
为了得到逆问题的有用解,图像复原本身往往需要一个质量标准,即衡量接近全真景物图像的程度,或者说,对图像的估计是否达到最佳的程度。
需要有先验知识以及对解的附加约束条件。
典型的图像复原是根据图像退化的先验知识建立一个退化模型,以此模型为基础,采用各种逆退化处理的方法进行恢复,使图像质量得到改善。
2.2图像退化的数学模型一般来说,图像的生成可以简单地被描述为如下数学模型:(x,y)(x,y)g Hf =f(x,y)是成像景物,H 是综合退化因子,g(x,y)是退化图像。
图像f(x,y)可以表示为:(x,y)(,)(x ,y )d d f f αβδαβαβ∞∞∞∞=--⎰⎰用卷积符号∗表示为:(x,y)(x,y)(x,y)f f δ=*因此还有:(x ,y )(x,y)(x ,y )f f αβδαβ--=*--式中,(,)f αβ是像素点的特性函数,(x ,y )δαβ--为冲击响应。
假定成像系统是线性移不变系统:退化模型如图所示f (x,y)g不考虑加性噪声:(x,y)(x,y)(x,y)g f h =*考虑加性噪声:(x,y)(x,y)(x,y)(x,y)g f h n =*+卷积等同于频域乘积:G(u,v)F(u,v)H(u,v)N(u,v)=+2.3逆滤波复原逆滤波复原法也叫做反向滤波法,其主要过程是首先将要处理的数字图像从空间域转换到傅里叶频域中,进行反向滤波后再由频率域转回到空间域,从而得到复原的图像信号[5]。
1.在不考虑噪声的情况下:(x,y)(,)(x ,y )d d g f h αβαβαβ+∞+∞-∞-∞=--⎰⎰上式两边进行傅里叶变换得(u,v)F(u,v)H(u,v)G =则原始图像ˆ(u,v)F = (u,v)(u,v)G H然后进行傅里叶逆变换,就可以得到原始图像。
由此可看出,如果已知退化图像的傅里叶变换和“滤波”传递函数,则可以求得原始图像的傅里叶变换,经反傅里叶变换就可以求得原始图像f(x,y),这就是逆滤波法的基本原理。
但在实际中用逆滤波法存在病态的情况:当H(u,v)=0时,或非常小的数值点上,F(u,v)将变成无穷大或非常大的数。
2.在有噪声的情况下:逆滤波原理可以写成:G(u,v)=F(u,v)H(u,v)+N(u,v)写成逆滤波的方式:F ̂(u,v)=F(u,v)+ N(u,v)(u,v)H 但实际用逆滤波存在病态的情况:噪声存在,当H(u,v)很小或为零时,则噪声被放大。
这意味着退化图像中小噪声的干扰在H(u,v)较小时,会对逆滤波恢复的图像产生很大的影响,有可能使恢复的图像和f(x,y)相差很大,甚至面目全非。
实验证明,当退化图像的噪声较小,即轻度降质时,采用逆滤波复原的方法可以获得较好的结果。
通常,在离频率平面原点较远的地方数值较小或为零,因此图像复原在原点周围的有限区域进行,即将退化图像的傅里叶频谱限制在没出零点而且数值又不是太小的有限围。
2.4 维纳滤波复原逆滤波比较简单,但没有清楚地说明如何处理噪声,而维纳滤波综合了退化函数和噪声统计特性两个方面进行复原处理。
维纳滤波是维纳在1949年提出的,并应用于一维平稳时间序列,获得了满意的结果。
这是最早也是最著名的线性滤波技术。
采用维纳滤波是假设图像信号可以近似看成平稳随机过程的前提下,按照使f(x,y)和f̂(x ,y )之间的均方误差达到最小的准则函数来实现图像复原的,即 22ˆmin {[f(x,y)f(x,y)]}e E =- 式中,E (∙)代表求期望值。