JK12CX00X系列七彩控制器使用说明书
7 采集柜CDJK使用说明书

CDJK 采集柜操作手册北京群菱能源科技有限公司欢迎您使用本公司产品我们强烈建议您遵循下述说明:您开箱验机时,请依据订货合同和装箱清单逐一清点并核实铭牌上的品名、性能参数是否有误,检查可能因运输原因导致的缺损。
在您调试本产品前,请详细阅读使用说明书,您将在安装、运行、维修等方面得到帮助,以便您更顺利地使用本产品。
安全注意事项警告:为了避免在测试过程中发生电击事故,请按照贵公司的安全规程进行操作,并遵循以下几点原则:戴防护眼镜或面罩戴橡胶防护手套穿防护围裙或工作服只做您受过培训的维护工作避免让自己处于回路中避免接触框架及靠近金属物品,这些可能在你接触设备时接地目录第一章功能特点 (3)第二章系统构成 (4)1.设备外观 (4)2.面板介绍 (5)3.接线室介绍 (7)第三章保固承诺 (11)第四章标准配置 (12)第一章功能特点●充电桩测试接口柜带有交流电源的输入输出接口,输入接口采用镀锌铜排连接方式,输出接口采用一拖二接口方式,输入接口带有630ABB空开,满足最大500kW通道能力;●交直流采集柜输出接口采用黄、绿、红、蓝四种颜色的A\B\C\N快速接线端子和镀锌铜排两种接线方式,满足不同功率等级充电桩电源接入需求;●交直流采集柜交流电源输出侧带有并机输出接口,可满足最大240kW非车载充电机输入电源的需求;●交直流采集柜带有交流电源输出侧和直流负载接入侧电压、电流采集接口,接口接线方式采用4mm标准安全插座,可实现与功率分析仪、示波器及其他参数采集设备的对接,同时可作为电压、电流计量的接口,实现对内置采集设备的计量功能;●交直流采集柜带有直流车辆插座和交流车辆插座,直流侧电流采集采用分档方式设计,可满足大小两个电流量程负载的接入要求,保证充电桩电气性能指标的测试精度;●交直流采集柜内置高精度电流霍尔传感器,并配备标准供电模块。
第二章系统构成1.设备外观图1 设备外形图●尺寸(L*W*H):1200*800*1870mm●重量:350KG2.面板介绍图2 前面板示意图说明如下:1、交流电源供电(50A)供电参数采集:用于采集交流50A供电时各相的电压、电流等信息,此处电流采集霍尔传感器变比为1000:1。
控制柜调试指导书
控制柜调试指导书(总16页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除6.5、起动力矩调整6.5.1、安装称重开关,按照额定载重的10%、25%、50%、80%、100%数值调整开关位置,100%时为超载。
请确保称重开关准确性。
6.5.2、进入M3-3-1-1,调整预转矩数值;如需细调,则进入M3-3-5菜单,根据实际情况,对负载开关补偿量进行调整。
注:M3-3-1-1中预转矩数值与M3-3-5补偿量的乘积,为系统实际起动过程中加载补偿量。
6.5.3、 L3的货梯,将132中的5和6的地址分别改为61-3和61-4,此装置装在机房中,不用调整加载补偿量6.6、电子称重装置的使用6.6.1. 仪器只接开门信号。
6.6.2. 设定开关位于运行位置,给开门信号(即给电子称重5号线24V)。
6.6.3. 电梯空载清零。
连续按动三次清零按钮,同时拌有三声轻响,随后听到三声长响应答,三位数码显示为000。
6.6.4. 电梯装入99%的额定载荷,按住清零按钮5秒以上,听到一声长响后,立即松开,三位数码显示为099-100。
6.6.5. 再将载重量增加至额定载荷就可达到超载报警。
称重装置的插头端子对照表见下面表格。
6.7、舒适感调整一般情况下调整3319中的加速度、减速度及其jerk0-jerk3进行调整。
根据现场的实际情况而定,一般不调。
6.8、试外招和消防a用万用表量H4插键是否有短路,正常后插好,拨好地址码。
外召地址从21开始,一个地址一层,以此类推,按下按钮能呼到指定楼层,完毕。
b按下消防开关,电梯能返回指定楼层,且轿厢显示紧急退出,轿门一直打开,则正常。
以上结束后电梯上下反复运行几次,正常则调试完毕。
七、故障排除3.9编码器定位出厂时主机已经与控制柜进行配对试验,定位角度已经存在变频器中,如果发现主机运行异常或驱动器内参数与主机实际参数不符,则需要重新定位。
12轴步进电机控制说明书

27
2:ad
1:X 归零
28
2:Y 归零
3: Z 归零
四 速度 号 速度 电 速度 机 命 令 1:开启
0:关闭
脉冲高 脉冲低 31 脉冲高 脉冲低 32 脉冲高 脉冲低 33 脉冲高 脉冲低 34 脉冲高 脉冲低 35
36
反转 掉电 脉冲数赋值 前往坐标 加速启动
赋值为 0 等价于停止 单位为脉冲
据,则必须实时发送数据包回传请求:
表 4-2 限位开关含义
个位
左限位导通为 1 下限位导通 2 都不导通为 0
十位
左限位导通为 1 右限位导通为 2 都不导通为 0
百位
顶限位导通为 1 底限位导通为 2 都不导通为 0
注:如限位值为 210 含义为:Z 轴底限位导通+Y 轴左限位导通为 1+X 限位开关在常态。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下 使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机 却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
ZJDR-01 运动控制卡是智俊电子潜心研制的一款价格便宜、使用方便的 USB 总线 12 轴运 动控制卡。外壳阳极氧化铝合金外壳,美观,散热好,自带十二轴 1A(峰值 2A)的步进电机 驱动器,驱动 42 电机游刃有余,能直接驱动部分 57 电机,每轴位置指令脉冲频率可达 300KHz, 支持十二轴联动,各自拥有自己的坐标系。启动与停止具有梯形速度控制功能,自带上位机。 并开源上位机源代码,适合二次开发,支持 PC 通过 USB 给控制器发出动作命令,也支持单片 机通过 5V 串口直连控制板,内置 15V 电平转换芯片,可远距离控制,外扩方面拥有 8 路继电 器,能直接控制汽缸,电磁阀,电机等,且能直接控制一个直流电机的正反转(需 4 个继电器配 合),4 路晶体管输出,其中 24 路输入内部上拉,可配置成限位开关(触发坐标变 0,电机即停), 或配置成状态输入(通过串口协议发送状态)。
红外线遥控七色小彩灯
红外线遥控七色小彩灯功能说明:利用红外线遥控系统,控制3个高亮度LED,其发光颜色分别为红、绿、蓝。
再根据三基色原理进行组合,使得彩灯呈现7种不同颜色。
按下遥控器1键,彩灯呈现红色。
按下遥控器2键,彩灯呈现黄色。
按下遥控器3键,彩灯呈现绿色。
按下遥控器4键,彩灯呈现青色。
按下遥控器5键,彩灯呈现蓝色。
按下遥控器6键,彩灯呈现紫色。
按下遥控器7键,彩灯呈现白色。
按下遥控器POWER键,关闭彩灯。
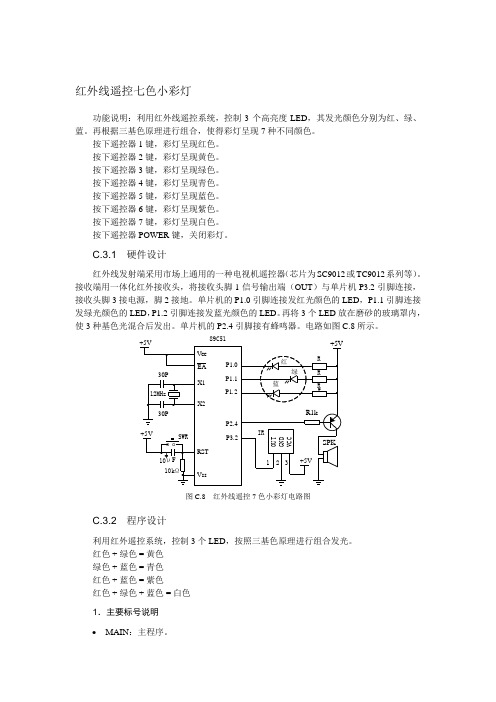
C.3.1 硬件设计红外线发射端采用市场上通用的一种电视机遥控器(芯片为SC9012或TC9012系列等)。
接收端用一体化红外接收头,将接收头脚1信号输出端(OUT)与单片机P3.2引脚连接,接收头脚3接电源,脚2接地。
单片机的P1.0引脚连接发红光颜色的LED,P1.1引脚连接发绿光颜色的LED,P1.2引脚连接发蓝光颜色的LED。
再将3个LED放在磨砂的玻璃罩内,使3种基色光混合后发出。
单片机的P2.4引脚接有蜂鸣器。
电路如图C.8所示。
89C51图C.8 红外线遥控7色小彩灯电路图C.3.2 程序设计利用红外遥控系统,控制3个LED,按照三基色原理进行组合发光。
红色 + 绿色 = 黄色绿色 + 蓝色 = 青色红色 + 蓝色 = 紫色红色 + 绿色 + 蓝色 = 白色1.主要标号说明MAIN:主程序。
∙IR_IN:解码子程序。
∙IR_ZX:遥控执行子程序。
∙FS_SPK:发声子程序。
∙DE:短暂延时子程序。
∙DELAY05_R5:延时子程序,总延时时间为0.5ms*R5。
∙DEL:用于解码延时子程序,延时时间为0.093ms。
2. 程序清单汇编语言编写的红外线遥控7色小彩灯源程序IR03.ASM代码如下:01 ;----------------------------------------------------------------------02 ;程序名:IR03.ASM03 ;程序功能:红外线遥控7色小彩灯04 ;--------------------------------------------------------------- -------05 ;---------------------------- 程序初始化--------------------------------0607 IR_K1 EQU 01H ; IR 遥控器按键1比较码08 IR_K2 EQU 02H ; IR 遥控器按键2比较码09 IR_K3 EQU 03H ; IR 遥控器按键3比较码10 IR_K4 EQU 04H ; IR 遥控器按键4比较码11 IR_K5 EQU 05H ; IR 遥控器按键5比较码12 IR_K6 EQU 06H ; IR 遥控器按键6比较码13 IR_K7 EQU 07H ; IR 遥控器按键7比较码14 POWER EQU 12H ; IR 遥控器POWER按键比较码15;----------------------16 R_LED EQU P1.0 ; 发红光LED控制引脚定义17 G_LED EQU P1.1 ; 发绿光LED控制引脚定义18 B_LED EQU P1.2 ; 发蓝光LED控制引脚定义19;-------------------------2021 SPK EQU P2.4 ; 压电喇叭信号输入位22 IRIN EQU P3.2 ; 红外线IR信号输入位23 ;--------------------------24 IRDZ EQU 20H ; 解码数据放置起始地址25 DZ3 EQU 22H ; 比较第3字节26 ;------------------------------ 主程序---------------------------------2728 MAIN:29 ACALL FS_SPK ; 调用发声子程序,响一声30 SETB IRIN ; IR 输入位设置为高电平31 LOOP:32 MOV R0, #IRDZ ; 设置IR解码起始地址33 ACALL IR_IN ; 调用解码子程序,解码34 ACALL IR_ZX ; 调用遥控执行子程序,执行动作35 JMP LOOP ; 继续循环执行3637 ;------------------------------ 解码子程序------------------------------38 IR_IN:39 ; 确认IR信号出现,避开9ms引导脉冲40 L1: JNB IRIN, L2 ; 等待IR信号出现41 JMP L142 L2: MOV R5,#17 ; 避开9毫秒引导脉冲43 ACALL DELAY05_R544 JB IRIN, L1 ; 确认IR信号出现4546 L3: JB IRIN, L4 ; 等IR变为高电平47 ACALL DEL ; 调用0.093ms延时程序48 JMP L349 L4: MOV R3,#0 ; 8位计数清为050 ;-------------------------------51 ; 避开低电平,待直接判断高电平52 L5: JNB IRIN, L6 ; 等IR变为低电平53 ACALL DEL ; 调用0.093ms延时程序54 JMP L555 L6: JB IRIN, L7 ; 等IR变为高电平56 ACALL DEL ; 调用0.093ms延时程序57 JMP L658 ;-------------------------------59 ; 通过调用0.093ms延时次数的计数值来判断高电平的宽度,解码0或160 L7: MOV R2,#0 ; 0.093ms计数清为061 L8: ACALL DEL ; 调用0.093ms延时子程序62 JB IRIN, L9 ; 等IR变为高电平63 ;-----------------------64 MOV A,8 ; 将A寄存器设置为865 CLR C ; 清除借位标志C66 SUBB A,R2 ; 以减法指令SUBB来判断高低位67 MOV A,@R0 ; R0值为解码内存地址,即取出内存数据给A68 RRC A ; 将借位标志C右移进入A69 MOV @R0, A ; 将数据写入内存70 INC R3 ; R3值加1,处理完一位71 CJNE R3,#8,L5 ; 需处理完8位72 ;---------------------73 MOV R3,#0 ; 计数清074 INC R0 ; R0值加175 CJNE R0, #23H, L5 ; 收集到4字节76 JMP L1077 L9: INC R2 ; R2值加178 CJNE R2, #30, L8 ; 计数过长离开79 L10:80 RET ; 子程序返回8182 ;---------------------------- 遥控执行子程序-----------------------------8384 IR_ZX: ; 红光LED亮85 MOV A, DZ3 ; 将第3字节数据赋予A86 CJNE A, #IR_K1, A1 ; 与按键1码比较,不是则继续向下比较87 ACALL FS_SPK ; 调用发声子程序,响一声88 SETB G_LED ; 绿光LED熄灭89 SETB B_LED ; 蓝光LED熄灭90 CLR R_LED ; 红光LED亮91 RET92 ;---------------------------93 A1: ; 发黄色光94 MOV A, DZ3 ; 将第3字节数据赋予A95 CJNE A, #IR_K2, A2 ; 与按键2码比较,不是则继续向下比较96 ACALL FS_SPK ; 调用发声子程序,响1声97 SETB B_LED ; 蓝光LED熄灭98 CLR R_LED ; 红光LED亮99 CLR G_LED ; 绿光LED亮100 RET101 ;---------------------------102 A2: ; 发绿色光103 MOV A, DZ3 ; 将第3字节数据赋予A104 CJNE A, #IR_K3, A3 ; 与按键3码比较,不是则继续向下比较105 ACALL FS_SPK ; 调用发声子程序,响1声106 SETB B_LED ; 蓝光LED熄灭107 SETB R_LED ; 红光LED灭108 CLR G_LED ; 绿光LED亮109 RET110 ;--------------------------111 A3: ; 发青色光112 MOV A, DZ3 ; 将第3字节数据赋予A113 CJNE A, #IR_K4, A4 ; 与按键4码比较,不是则继续向下比较114 ACALL FS_SPK ; 调用发声子程序,响1声115 SETB R_LED ; 红光LED熄灭116 CLR G_LED ; 绿光LED亮117 CLR B_LED ; 蓝光LED亮118 RET119 ;---------------------------120 A4: ; 发蓝色光121 MOV A, DZ3 ; 将第3字节数据赋予A122 CJNE A, #IR_K5, A5 ; 与按键5码比较,不是则继续向下比较123 ACALL FS_SPK ; 调用发声子程序,响1声124 SETB R_LED ; 红光LED熄灭125 SETB G_LED ; 绿光LED熄灭126 CLR B_LED ; 蓝光LED亮127 RET128 ;---------------------------129 A5: ; 发紫色光130 MOV A, DZ3 ; 将第3字节数据赋予A131 CJNE A, #IR_K6, A6 ; 与按键6码比较,不是则继续向下比较132 ACALL FS_SPK ; 调用发声子程序,响1声133 SETB G_LED ; 绿光LED熄灭134 CLR R_LED ; 红光LED亮135 CLR B_LED ; 蓝光LED亮136 RET137 ;---------------------------138 A6: ; 发白色光139 MOV A, DZ3 ; 将第3字节数据赋予A140 CJNE A, #IR_K7, A7 ; 与按键7码比较,不是则继续向下比较141 ACALL FS_SPK ; 调用发声子程序,响1声142 CLR R_LED ; 红光LED亮143 CLR G_LED ; 绿光LED亮144 CLR B_LED ; 蓝光LED亮145 RET146 ;---------------------------147 A7: ; 关闭彩灯148 MOV A, DZ3 ; 将第3字节数据赋予A149 CJNE A, #POWER, A8 ; 与POWER按键码比较,不是返回150 ACALL FS_SPK ; 调用发声子程序,响2声151 ACALL FS_SPK152 SETB R_LED ; 红光LED熄灭153 SETB G_LED ; 绿光LED熄灭154 SETB B_LED ; 蓝光LED熄灭155 A8:156 RET157158 ;---------------------------- 发声子程序-------------------------------159 FS_SPK: ; 发声子程序160 MOV R6, #0161 B1: ACALL DE162 CPL SPK163 DJNZ R6,B1164 MOV R5, #100165 ACALL DELAY05_R5166 RET167168 ;----------------------------- 短暂延时子程序-------------------------169 DE:170 MOV R7, #180171 DE1: NOP172 DJNZ R7,DE1173 RET174175 ;--------------------------- 延时子程序-------------------------------176 DELAY05_R5: ; 总延时时间为0.5ms*R5177 MOV R6, #5178 D1: MOV R7, #10179 DJNZ R7, $180 DJNZ R6, D1181 DJNZ R5, DELAY05_R5182 RET183 ;------ ----------------------- 解码延时子程序--------------------------184 DEL: ; 延时为0.093ms185 MOV R7, #22186 E1: NOP187 NOP188 DJNZ R7, E1189 RET190 ;---------------------------------------------------------------------191 END ; 程序结束C.3.3 代码详解07~25:为程序初始化部分。
24键红外全彩控制器说明书(中文

静态黄色
模式四
静态白色
模式十一
静态紫灰色
模式十八
静态青色
模式五
静态玫瑰红色
模式十二
七彩渐变
模式十九
静态紫色
模式六
静态草绿色
模式十三
静态鹅黄色
模式二十
七彩跳变
模式七
静态宝石蓝
模式十四
静态天蓝色
本机24个按键:“UP”“DOWN”键为静态调节亮度和动态调节速度;“OFF”为关机键;“ON”为开机键;1-20为模式键。
三产品接线图
四注意事项
1使用的电源电压必须与本产品的工作电压相符
2请正确按接线图接线,操作过程中注避免短路
3本产品保质期限为1年,但不包括人为损坏或超负荷工作的情形
24键红外七彩控制器使用说明书
一性能参数
工作电压:DC12VDC24V工作温度:-20~60℃
最大总输出功率:72W144W遥控距离:>15m
输出:3路连接方式:共阳共阴
二模式及按Hale Waihona Puke 功能模式一静态红色
模式八
三色跳变
模式十五
静态酱紫色
模式二
静态绿色
模式九
静态橙色
模式十六
三色渐变
模式三
静态蓝色
模式十
静态青蓝色
彩灯控制系统说明书

电子技术课程设计设计报告题目:彩灯控制电路姓名:学号:班级:计算机科学与技术1班指导教师:日期:2013.1.10摘要随着人们生活环境的不断改善和美化,在许多场合可以看到彩色霓虹灯。
用彩灯来装饰街道和城市建筑物已经成为一种时尚。
在这样的大环境下,我们需要开发出更加时尚,而且电路简单,功能更多的多路彩灯控制器,使得它能在不同的场合,不同时间段,能够有不同的闪烁频率。
通过对数字电子技术课程所学的基础理论知识的认识、了解与掌握。
本设计将采用几个基本的数字集成的74系列(74LS161,74LS151, 74LS193,555)芯片来完成所需要的数字逻辑显示功能。
设计过程中,先进行单元电路的设计,再进行总体方案的设计,通过几个方案的对比,得出最佳方案来设计总电路图。
设计的思想是以最少的芯片数量,制作成体积小、功耗低,并且具有很好的可靠性和可扩展性。
关键字计数器;数据选择器;移位寄存器目录摘要 (2)目录 (3)一、设计的任务与要求 (4)1.1 设计任务 (4)1.2设计要求 (4)二、系统设计 (6)三、方案选择与论证 (6)四、单元电路设计 (7)五实验过程与结论 (11)六心得体会 (12)七参考文献 (14)附录I:总原理图 (14)附录II:multisim仿真图 (15)附录III:元器件清单 (16)一、设计的任务与要求1.1 设计任务四路彩灯从左向右逐次渐亮,间隔为1秒。
四路彩灯从右向左逐次渐灭,间隔为1秒。
四路彩灯同时点亮,时间为0.5秒,然后同时变暗,时间为0.5秒, 反复4次课程设计作为数字电子技术课程的重要组成部分,目的是使学生进一步理解课程内容,基本掌握数字系统设计和调试的方法,增加集成电路应用知识,培养学生实际动手能力以及分析、解决问题的能力。
按照本专业培养方案要求,在学完专业基础课数字电子技术课程后,应进行课程设计,其目的是使学生更好地巩固和加深对基础知识的理解,学会设计小型数字系统的方法,独立完成系统设计及调试,增强学生理论联系实际的能力,提高学生电路分析和设计能力。
控制器的使用说明书

控 制 器
机种一览 24V 触摸面板
网关单元
简易绝对 型单元
RoBoNET
ดވ፺ RCS2 Ⴜள / ܠ፺ᄚ༇ / ፊღཔ࠵ดވ፺
మݢ܌େ Ȕᄲख˖CB-RCC-MAɕɕɕȕ Ꮃ 1m/3m/5m ֦ᆻቂݢେدጐ P424
ףబධݢେ Ȕᄲख˖CB-RCS2-PAɕɕɕȕ Ꮃ 1m/3m/5m ֦ᆻቂݢେدጐ P424
对于形状相同但是孔眼位置稍有不同的多个工件的场合,可以通过使用同一位置 No. 的移动指令,但是切换品种编号的 方式予以应对。
定位模式
2 轴独立模式 2 轴控制器时,可以分别指示各轴进行动作。
示教模式
DS-S-C1 兼容模式
可利用外部信号移动滑块(拉杆),将停止位置写入位置数据。 当使用了 DS-S-C1 控制器时,无需变更上位程序,可以直接替换控制器。※ 与驱动轴之间没有兼容性。
2m
5m
0.2m
ܕRS232C ݢେ ᄲख˖CB-ST-
E1MW050-EB ˄ࡒ༥ི
IA-101-X-MW˅
5m
Ꭱ४ݢେ˄دጐ P424˅ Ȕᄲख˖CB-SEL-SJ002ȕ ˄ᅤჵ˅
1m
USB ݢେ˄دጐ P424˅ Ȕᄲख˖CB-SEL-USB010ȕ ˄ࡒ༥ི IA-101-X-USB˅
ə1 ፺ࣙࢆˈᅍᇋ ݕ2 ፺๒ȃ
I/O ፯ I/O ݢେܿ٣ݢ ޡኑݢᅼ
C Ꮃᄲ
1 1 ፺ࣙࢆ 2 2 ፺ࣙࢆ
20 20W པ࠵మ ܌200 200W པ࠵మ܌ 30D RCS2 ቂ 30W པ࠵మ ܌300 300W པ࠵మ܌ 30R RS ቂ 30W པ࠵మ ܌400 400W པ࠵మ܌ 60 60W པ࠵మ ܌600 600W པ࠵మ܌ 100 100W པ࠵మ ܌750 750W པ࠵మ܌ 150 150W པ࠵మ܌
七彩循环装饰灯控制器课程设计

七彩循环装饰灯控制器课程设计设计课题:七彩循环装饰灯控制器课程设计专业班级:姓名:学号:设计时间:2014年⽉号 - 2015年⽉号⽬录绪论 (2)第⼀章设计思路 (4)1.1 设计⽬的 (4)1.2 设计内容及要求 (4)1.3 控制器电路的⼯作原理 (5)第⼆章总体⽅案的设计 (7)2.1 总体⽅案的设计 (7)2.2 总体⽅案的优势 (7)2.3 参数的计算 (8)2.4 仿真 (8)第三章单元电路的设计 (9)3.1 电源变换电路 (9)3.2 调⾊时钟脉冲发⽣电路 (9)3.3 灯光变⾊控制电路 (10)3.4 负载电路 (11)第四章使⽤元件及介绍 (12)4.1 设计所需的元件: (12)4.2 元件具体介绍 (12)4.2.1 555定时器 (12)4.2.2 cd4518: (13)4.2.3 晶闸管: (14)第五章单元电路的补充 (15)第六章结论 (17)第七章⼼得体会 (18)参考⽂献 (20)绪论七彩灯的实际应⽤该灯电路设计新颖,结构简单,成本低廉,趣味性强,可⽤在宾馆、酒楼作⼴告灯,也适⽤作节⽇彩灯。
系19世纪兴起的数字电路以其先天的便捷、稳定的优点在现代电⼦技术电路中占有越来越重要的地位。
数字电路与模拟电路相⽐有显⽽易见的稳定性。
近年来,数字电路⼜有了巨⼤的发展。
可编程逻辑器件(PAL、GAL等)的发展和普及最终使IC的设计⾯向了⽤户(这是模拟电路⽆法做到的),⽽这毫⽆疑问会给⽤户带来巨⼤的便捷,从⽽奠定它在电⼦电路中的对位。
随着集成技术的进⼀步提⾼,各种新技术的出现和应⽤,⼈类历史横跨数码时代向更进⼀步发展已出现在各⼤型相关企业的宏伟蓝图中。
新世纪⾥谁掌握了新技术谁就得到了获胜的资本,也仅仅是资本⽽矣。
新世纪⾥电⼦⾏业的发展速度令⼈窒息,闻名的摩尔定律更把许多⼈威吓在门外。
可以展望,⼀个由数字构成的新世界即将出现。
利⽤控制电路可使彩灯(例如霓虹灯)按⼀定的规律不断的改变状态,不仅可以获得良好的观赏效果,⽽且可以省电(与全部彩灯始终全亮相⽐)。
勤牛多功能控制器用户手册 说明书

多功能控制器用户手册(技术开发文档)文档版本:V1.002发布日期:2021/04/12版权所有© 勤牛创智科技有限公司2021。
保留一切权利。
非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式传播。
免责申明在法律允许的最大范围内,本手册所描述的产品(含其硬件、软件、固件等)均“按照现状”提供,可能存在瑕疵、错误或故障,勤牛创智不提供任何形式的明示或默示保证,亦不对使用本手册或使用本公司产品导致的任何特殊、偶然或间接的损害进行赔偿。
在使用本产品前详细阅读本使用手册及网上发布的相关技术文档并了解相关信息,确保在充分了解产品相关知识的前提下使用本产品。
本产品的使用者有责任确保遵循相关国家的切实可行的法律法规,确保在勤牛创智机械臂的使用中不存在任何重大危险。
版本修订说明北京勤牛创智科技有限公司地址:北京市海淀区清华东路16 号3号楼中关村能源与安全科技园1603 室网址:目录1. 产品简介....................................................................................................................................................................... - 6 -1.1多功能控制器概述 .......................................................................................................................................... - 6 -1.2控制器外观接口总览...................................................................................................................................... - 6 -2. 控制器接口功能介绍................................................................................................................................................ - 8 -2.1状态指示灯........................................................................................................................................................ - 8 -2.2 OLED屏幕.......................................................................................................................................................... - 8 -2.3导航键 ................................................................................................................................................................. - 8 -2.4第7轴步进电机接口...................................................................................................................................... - 9 -2.5第7轴复位开关接口....................................................................................................................................- 10 -2.6电源输出接口..................................................................................................................................................- 10 -2.7串口通信接口..................................................................................................................................................- 10 -2.8 RS485通信接口 .............................................................................................................................................- 11 -2.9串口通信接口..................................................................................................................................................- 11 -2.10 PWM信号输出接口...................................................................................................................................- 12 -2.11 I/O接口..........................................................................................................................................................- 12 -2.12扩展通信接口...............................................................................................................................................- 13 -2.13 TF卡插槽.......................................................................................................................................................- 13 -3.控制器快速入门..........................................................................................................................................................- 14 -2.1硬件连接...........................................................................................................................................................- 14 -2.2气泵及舵机使用.............................................................................................................................................- 15 -2.3滑轨及传送带使用 ........................................................................................................................................- 16 -2.4执行脱机文件..................................................................................................................................................- 17 -⚫主界面....................................................................................................................................................- 17 - ⚫一级菜单 ...............................................................................................................................................- 17 - ⚫执行“test.gcode”.................................................................................................................................- 18 - ⚫暂停运行 ...............................................................................................................................................- 19 - ⚫停止运行 ...............................................................................................................................................- 19 -2.5脱机文件下载..................................................................................................................................................- 20 -2.6蓝牙通信...........................................................................................................................................................- 22 -⚫示教器蓝牙连接..................................................................................................................................- 22 - ⚫手机APP蓝牙连接............................................................................................................................- 24 - ⚫电脑蓝牙连接......................................................................................................................................- 26 - ⚫修改蓝牙名称与密码 ........................................................................................................................- 28 -2.7 RS485通信 ......................................................................................................................................................- 30 -⚫RS485模式设置..................................................................................................................................- 31 - ⚫配置地址 ...............................................................................................................................................- 32 - ⚫硬件连接 ...............................................................................................................................................- 33 - ⚫多机控制 ...............................................................................................................................................- 33 -2.8 WIFI通信..........................................................................................................................................................- 34 -2.9 串口通信..........................................................................................................................................................- 35 -2.10 I/O引脚触发.................................................................................................................................................- 37 -3.控制器固件升级..........................................................................................................................................................- 38 -3.1控制器固件升级步骤:...............................................................................................................................- 38 -附件一:指令表.............................................................................................................................................................- 39 -1. 产品简介1.1多功能控制器概述多功能控制器(以下简称“控制器”)是Mirobot机械臂的重要配件。
XK显示控制器使用手册DOC

XK-2000 显示控制器使用手册本手册用于皮带机积算系统在安装和操作前请仔细阅读本手册并严格遵守设备操作规范南京文佳机电设备有限公司目录1、仪表概述 (2)2、技术规范 (5)3、仪表安装 (9)4、仪表接线 (10)5、操作运行 (20)6、系统校准 (31)7、控制调整 (49)8、参数说明 (50)第一章 XK-2000 概述1.1 功能简介:XK-2000 是以美国CYGNAL公司推出的高速、高性能混合信号处理单片计算机为核心而设计的多功能显示控制仪表,可以配合螺旋给料机、皮带机、称重料斗等使用。
仪表检测来自控制设备上的各种传感器信号,经过处理后在液晶显示器(4行汉字显示器)上显示、远程显示或通过数字通讯口传输给上位计算机显示,也可输出模拟量mA信号、继电器工作状态及报警输出信号。
XK-2000 仪表可应用于计量(控制)皮带机、固体流量计、质量流量计、质量加料机、称重加料机、减量喂料机。
XK-2000带两个隔离的RS485通讯接口:采用独立的多功能通信协议,并支持MODBUS 协议(附数据地址表)。
1.2 性能特点:●汉字显示菜单式用户操作界面:128×64点阵液晶显示器,四行汉字显示,六键操作系统。
●丰富的I/O资源:六个可编程开关量输入六个可编程继电器输出一路可用于PID控制的模拟量输入二路16位D/A(PWM)用于控制、流量、重量、速度的电流选择输出。
二路PID(0 ~ 20mA)电流控制输出●双路数字通讯接口:二个隔离的RS-485接口,用于:通讯口1、2,皆可选择专用独立的多功能通信协议及兼容的标准MODBUS 通讯协议。
通讯机器号:0 ~ 999数据传输率:0.3kbit/s ~ 115.2kbit/s。
多功能控制系统:软件集成多功能控制系统,可根据不同的工艺应用要求及称重方式选择不同的控制系统功能。
仪表控制具有手、自动选择。
自动清零(皮带秤自动整圈)、称重传感器满量程校准、流量校准功能。
PC7电子控制器操作维护手册说明书

SERIAL NUMBER (located on top of product):Phone: 800-669-1303 or 801-561-0303 Fax: 801-255-2312e-mail:**************************PC7 PUMP CONTROLLEROperation / MaintenanceManualCONTENTS1INSTALLATION (3)1.1UNPACKING (3)1.2UTILITIES / HOOK-UP (3)2OPTIONS (5)2.1UNIT IS AVAILABLE IN BOTH PFA AND PP CONSTRUCTION (5)3START-UP (6)3.1PERFORMANCE CHARTS (7)4MAINTENANCE (8)4.1PREVENTIVE MAINTENANCE SCHEDULE (8)4.1.a Preventive Maintenance Record (9)4.2RECOMMENDED SPARE PARTS (10)4.3TOOLS (10)4.4PARTS ILLUSTRATION – PC7 (10)4.5PARTS LIST – PC7F (11)4.6PARTS LIST – PC7P (11)4.7CLEAN-UP (12)4.8DISASSEMBLY (12)4.9ASSEMBLY (12)5156161 INSTALLATION1.1 UNPACKINGAfter unpacking, the components should be checked for damage that may haveoccurred during shipment. Damage should be reported to the carrierimmediately.The following items should be included within the shipping container:Qty Item Description1 PC7F or PC7P PC7 PUMP CONTROLLER1 PC7-Manual Manual, PC7 Pump Controller1.2 UTILITIES / HOOK-UPThe controller can be mounted by any of three methods. It can be bolted to a wall or deck using the snap on base slots as shown below using four ¼”(6mm) boltsin the pattern shown below.MTD0616CONTROLLER - BOTTOM VIEWMTD0617MTD0618 PUMP INSTALLATION - BACK PUMP INSTALLATION - TOP1HEAD2MTD0619ADJUSTMENT SCREWAir Inlet:3/8” Flaretek (3/8” OD TUBING)Air Supply: 20-80 PSIG (1.4 – 5.4 BAR), CLEAN DRY AIR OR NITROGEN. Head Ports: 3/8” Flaretek (3/8” OD PFA TUBING)Recommended Maximum Operating Levels: 80 psig (5.4 bar)ATTENTION: The controller should be operated with clean, dry air or nitrogen. Particulate, water and oils in the air supply can damage the controller.2 OPTIONS2.1 UNIT IS AVAILABLE IN BOTH PFA AND PPCONSTRUCTIONThe PFA unit exterior parts are molded using PFA (Fluoroplastic) and the shuttle assembly is constructed of PEEK & PPS. The PFA unit is intended for severeapplications and for compliance with FM4910.The PP unit exterior parts are molded using Polypropylene (Polyolefin) and theshuttle assembly is constructed of PEEK & PPS. This unit is intended as a lower cost option with similar service life where exposure to oxidizing acids is limited.3 START-UP∙Controller air supply pressure must be regulated to a maximum of 80 psig.∙Open the fluid suction (IN) line valve, if necessary.∙Open the fluid discharge (OUT) line valve, if necessary.∙Adjust the speed control screw fully Clockwise (CW) until fully retracted.Warning! Do not apply too much torque to screw or damage may result.CONTROL SCREWCAUTION: When handling potentially dangerous fluids under pressure, the pump and its fittings should be placed in an enclosure away from operators.3.1 PERFORMANCE CHARTSPumping capacity is a function of air supply pressure and volume, suction head, suction line restrictions, discharge head, discharge line restriction, and fluidspecific gravity and viscosity.20 0 8020 1/2 3040 0 13540 2 7060 0 19060 2 8080 0 24080 2 110NOTE: Test information is based on specific conditions and limited sampling.Use for general reference only. This information is preliminary and may bechanged at a future date.4 MAINTENANCE4.1 PREVENTIVE MAINTENANCE SCHEDULEThe following maintenance schedule is recommended to optimize pump performance and minimize failures.Adhering to the recommended preventative maintenance schedule along with periodic inspection of the pump will ensure continued efficient operation and overall reliable pump performance.It is recommended that the Preventive Maintenance Record (Section 4.1.a) be copied, maintained and kept with this unit for future reference.PC7 MaintenanceReplacement InspectionComponent / Comments1 Y e a r2 Y e a r6 m o n t h s1 Y e a r2 Y e a rX Fitting Nuts (Connections) P/N (9002914) X X Detent Legs P/N (305-PD) X X Shuttle Spool P/N (305-PJ) X X Spring Bar P/N (305-QA)XMuffler Media (PC7 Controller) P/N (305-FR)4.1.a Preventive Maintenance RecordCompany Name: _____________________________________________________Company Address:_____________________________________________________Number:________________SerialProduct: _________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________Date: ________ Tech: _____ Notes: ________________________________________________________________________________4.2 RECOMMENDED SPARE PARTSThere are no recommended spare parts for the Purus 20 pump due to it’s welded and sealed construction. However there are spare parts available for rebuild ofthe PC7 pump controller.PC7 Pump Controller305-PD 4 EA LEG, DETENT305-QA 2 EA SPRING BAR, DETENT305-P016 2 EA SEAL, PTFE, 1.75 X 1.33 X .02 (PC7F ONLY!)305-P015 2 EA SEAL, PTFE, 1.82 X 1.33 X .02 (PC7P ONLY!)305-PJ 1 EA SPOOL, SHUTTLE305-P040 1 EA SCREW, SPEED ADJUSTMENT305-P048 1 EA FERRULE, PTFE305-FR 5 EA PAD, MUFFLER4.3 TOOLSThe only tool requirements are a Phillips #2 and Straight screwdriver.4.4 PARTS ILLUSTRATION – PC74.5 PARTS LIST – PC7FILLNOPART NO QTY DESCRIPTION PM YEAR #MATERIAL1 305-P049 1 NUT, COMPRESSION,PVDF, 3/8 PVDF2 305-P048 1 FERRULE, PTFE, PC7 PTFE3 305-P047 1 CAP,PFA,ADJUST,PC7 PFA4 305-040 1 SCR,ADJUST,PC7 PVDF5 305-PD 4 LEG,DETENT,PC7 DELRIN6 305-QA 2 SPRINGBAR,DETENT,OSCILLATOR PEEK7 305-QB 1 PLATE,SUPPORT,PC7 PVDF8 305-P007 2 SCR,NYLON,#8-32x.31,SLOVHD NYLON9 305-PJ 1 SPOOL,SHUTTLE,OSCILLATOR PEEK10 305-P016 2 SEAL,PTFE,GORTEX,1.75x1.33x.02 PTFE11 305-P050 1 RING,SPLIT,SINGLE TURN,PTFE,-016PTFE12 305-P014 2 FTG,PVDF,3/8"ME PVDF13 AK058 1 ASSY,SHUTTLESLEEVE CERAMIC14 305-P013 2 TUBE,TRANSFER,PFA PFA15 305-P009 3 NUT,PVDF,FLR,3/8T PVDF16 305-PA 1 BODY,OSCILLATOR,PFA,PC7 PFA17 AW036-01 2 ORIFICE, PRESS-IN .024 PEEK18 305-P011 1 CAP,PFA,PC7 PFA19 305-FR 4 PAD,MUFFLER,PP,25MICRON PP20 305-QF 1 BASE,PFA,PC7 PFA4.6 PARTS LIST – PC7PILLNOPART NO QTY DESCRIPTION PM YEAR #MATERIAL1 305-P052 1 NUT, COMPRESSION, PP, 3/8 PP2 305-P048 1 FERRULE, PTFE, PC7 PTFE3 305-P046 1 CAP,PP,ADJUST,PC7 PP4 305-P040 1 SCR,ADJUST,PC7 PVDF5 305-PD 4 LEG,DETENT,PC7 DELRIN6 305-QA 2 SPRINGBAR,DETENT,OSCILLATOR PEEK7 305-QB 1 PLATE,SUPPORT,PC7 PVDF8 305-P007 2 SCR,NYLON,#8-32x.31,SLOVHD NYLON9 305-PJ 1 SPOOL,SHUTTLE,OSCILLATOR PEEK10 305-P016 2 SEAL,PTFE,GORTEX,1.75x1.33x.02 PTFE11 305-P050 1 RING,SPLIT,SINGLE TURN,PTFE,-016PTFE12 305-P045 2 FTG,PP,3/8"ME PP13 AK058 1 ASSY,SHUTTLESLEEVE CERAMIC14 305-P013 2 TUBE,TRANSFER,PFA PFA15 305-P009 3 NUT,PVDF,FLR,3/8T PVDF16 305-P006 1 BODY,OSCILLATOR,PPPC7 PP17 AW036-01 2 ORIFICE, PRESS-IN .024 PEEK18 305-P002 1 CAP,PFA,PC7 PFA19 305-FR 4 PAD,MUFFLER,PP,25MICRON PP20 305-P005 1 BASE,PP,PC7 PP4.7 CLEAN-UPDue to possible contamination all components must be flushed clean andneutralized before disassembly to prevent fluid contact with personnel.4.8 DISASSEMBLYTo disassemble PC7 pump controller for service, remove controller from pump by disconnecting the flare fittings on the PC7 from the transfer tubes connecting it to the pump.Caution: For safety make sure air supply to PC7 has been shut off prior toremoval of supply line.∙Unscrew Adjustment Cap from controller body and carefully twist shuttle spool from sleeve by rotating cap assembly.∙Gently remove the cap seal from the seat inside the cap to prevent any damage or possible scratches to sealing surface. Replacement of seal isrecommended after service.∙Use a straight blade screwdriver to remove the two retaining screws from the support plate. Next loosen compression nut and ferrule from adjustmentscrew and gently push the adjustment screw out of the cap by pressing onthe end. This assembly contains the only serviceable items. See explodedassembly for part numbers and part locations.∙Inspect parts for wear and replace if necessary.4.9 ASSEMBLY∙To reassemble detent, twist the adjustment screw into the support plate and then insert 2 each spring bars into slots as per figure 1.MTD0630Figure 1∙Next insert 2 each detent legs as shown in Figure 1 and open spring bars to lock assembly as shown in Figure 2.MTD0631Figure 2∙Lastly insert 2 ea. detent legs into slots on shuttle spool as shown in Figure 3 and insert into previous assembly.MTD0632Figure 3∙ See completed detent assembly illustrated in Figure 4.MTD0633Figure 4∙Insert detent assembly into adjustable cap as shown here and install 2 each retaining screws.MTD0634Figure 5Note: Do not over tighten screws. Cap threads are easily stripped.∙Install ferrule onto adjustment screw with the longest taper toward the adjustment cap. Then install compression nut onto cap per figure 6.MTD0635Figure 6∙Tighten nut finger tight to engage compression seal.∙Insert Gortex seal into thread end of adjustable cap assembly onto sealing land as shown.MT D0636Figure 7∙Screw cap assembly with seal onto the open end of body assembly carefully inserting shuttle spool into valve body and engage air seal completely.∙Cap requires only moderate installation torque to activate seal. Over tightening can dislocate seal gasket preventing oscillation of the controller valve.5 TROUBLESHOOTINGController Will Not Operate or Cycles ErraticallyCause: Solution:∙PC7 cap seal failure ∙Remove caps from PC7 and replace PTFE cap seal.∙Debris in shuttle valve ∙Isopropyl alcohol clean the shuttle sleeve and spool assy.∙Insuffisant air pressure ∙Increase regulated supply pressure or check control valvesfor proper operation.∙Rotate PC7 speed control screw CW until it stops. Thenreadjust for correct speed.∙Adjustment Screw Seal failure ∙Replace adjustment screw assy.∙Spring bar failure ∙Spring bar needs replacement if not flat.6 WARRANTYPC7F OR PC7P CONTROLLERTREBOR International, Inc. warrants to the purchaser of new equipmentmanufactured by TREBOR to be free from defects in material and workmanshipwhen used for its intended purpose under normal operating conditions, andmaintained according to the Operation/Maintenance Manual.TREBOR’s obligation under this warranty is limited to repairing or replacing, atTREBOR’s option and at the TREBOR factory, any part or parts thereof whichshall, within 1 year after delivery thereof to the original purchaser, bedemonstrated to TREBOR’s satisfaction to have been defective. This warrantymay be transferred to subsequent owners. The warranty period is based on the original ship date from the factory. All warranty related freight costs shall beborne by the customer.Excessive wear to pump components caused by pumping abrasive solutions orchemicals, as well as damage caused by ingesting foreign objects shall not becovered by this warranty.This warranty shall not apply to any equipment which, in the judgment ofTREBOR, shall have been repaired or altered outside TREBOR’s factory in anyway, so as to affect its performance or reliability; subjected to misuse, negligence or accident; or used other than in accordance with TREBOR’s printedinstructions.There are no terms, conditions or warranties, expressed, implied orstatutory, of merchantability, fitness, capacity, or otherwise, of the goodsordered, other than, or different from, the warranty set forth above. Thiswarranty takes precedence over any other warranty, expressed or implied.TREBOR neither assumes, nor authorizes any other party to assume for it, anyliability in connection with said equipment except as set forth above.。
JK-C100控制器说明书 V1.4

功能概述控制器产品外观及说明一、JK-C100A 控制器外观及说明①② ③ ④ ⑤ ⑥ ⑦二、控制器基本参数表:1. 可用按键快速调整控制器播放效果及速度;2. 最高65536级灰度控制,调光与混色效果更加柔和细腻;3. SD 卡存储动画数据方便快捷;4. 多台控制器之间支持交流工频同步、同步线同步两种同步方式,根据现场情况灵活选择;5. 芯片类型、时钟频率、灰度级等参数可通过软件设置更改,亦可通过修改SD 卡内配置文件更改;6. 支持大多数LED 驱动芯片,如TLS3001、TLS3008、LPD6803、LPD8806、WS2801、WS2803、MBI6020、MBI6021、MBI6024、TM1803、TM1804、P9813、DMX512等;7. 支持直流或交流宽电压供电;8. 控制器加密;9. 支持DMX512AP,UCS512等DMX 的写码 10.支持4色模式① 功能按键 ② 交流供电输入端 ③ 直流供电输入端 ④ 电源指示灯,状态指示灯 ⑤ 自弹式SD 卡插口 ⑥ 控制信号输出端 ⑦ 同步线输入/输出端控制器软件基本操作步骤1、新建工程打开LED Editor软件,选择控制器型号C 100;设置项目的宽高(根据项目实际像素大小);播放帧频;所带灯具芯片类型;控制器输出时钟频率等信息;并设置项目名称及文件保存路径,确定,以下图为例:注意:此信息设置完成后可以在菜单栏“工程设置“下项目属性进行查询或修改。
2、导入动画效果文件菜单栏选择“效果类型”,支持屏幕录制,AVI导入,FLASH导入以及软件自带测试,推移,效果炫彩,如图3、灯具布局文件菜单栏选择“工程设置”菜单,如图选择其中一种方式布局。
4、输出脱机文件菜单栏选择“工程输出”菜单,设置输出GAMMA值和亮度值后,选择“脱机数据输出文件”在项目文件的存储目录下分别生成不同编号的控制机脱机数据文件及配置文件的文件夹(如图),分别将文件夹内的子文件拷贝到已经格式化FAT32的SD卡内;其中”.bin ”文件为为节目效果,软件中编辑几个节目就会生成相应的几个“.bin ” “.ini ”文件为配置文件,配置文件里包含了一些参数信息,可以直接通过“.ini ”修改参数其中”.bin ”文件为为节目效果,软件中编辑几个节目就会生成相应的几个“.bin ” “.ini ”文件为配置文件: 配置文件里包含了一些参数信息, 可以直接通过“.ini ”修改参数, 如图及说明以上说明为简易软件操作说明,具体软件功能及细节请参见软件说明书。
TB系列温控器操作手册说明书

微電腦程序控制器操作手冊TB100 TB600 TB700 TB400 TB900在使用本控制器之前,請先確定控制器的輸入輸出範圍和輸入輸出種類與您的需求是相符的。
1. 面板說明1.1 七段顯示器PV :處理值(process value),紅色4位顯示 SV :設定值(setting value),綠色4位顯示.21.2 LED LED LEDOUT1 :第一組輸出(Output1),綠色燈OUT2 :第二組輸出(Output2),綠色燈 AT :自動演算(Auto Tuning),黃色燈PRO :程式執行中(Program),黃色燈 ----- 只適用於 P TB 系列 AL1 :第一組警報(Alarm 1),紅色燈 AL2 :第二組警報(Alarm 2),紅色燈MAN :輸出百分比手動調整(Manual),黃色燈※注意:當發生錯誤(Error)時,MAN 燈會亮,並將輸出百分比歸零1.3 按鍵SET:設定鍵(寫入設定值或切換模式) :移位鍵(移動設定位數):增加鍵(設定值減1):減少鍵(設定值加1) A/M :自動(Auto)/手動(Manual)切換鍵。
自動:輸出百分比由控制器內部演算決定手動:輸出百分比由手動調整OUTL(在User Level 中)決定2 自動演算功能(Auto tuning)2.2 需先將AT(在User Level 中)設定為YES ,啟動自動演算功能。
2.3自動演算結束後,控制器內部會自動產生一組新的PID 參數取代原有的PID 參數。
* 自動演算適用於控溫不準時,由控制器自行調整PID 參數。
2.4 ATVL:自動演算偏移量(AutoTuning offset Value)SV減ATVL為自動演算設定點,設定ATVL可以避免自動演算時,因PV值震盪而超過設定點(Overshoot)。
例如:SV=200℃,ATVL=5,則自動演算設定點為195℃當自動演算中,PV值震盪,則是在195℃上下震盪,因此可避免PV值震盪超過200℃。
LED全彩灯同步控制器使用说明书-V1.2

J S-D K系列L E D全彩控制器使用说明书(V1.2)J S-D K-T1a_1024(L E D全彩单通道同步控制器) J S-D K-T2a_1024(L E D全彩双通道同步控制器) J S-D K-T4a_1024(L E D全彩四通道同步控制器) J S-D K-T8a_1024(L E D全彩八通道同步控制器) J S-D K-T1b_512(L E D全彩单通道单机控制器) J S-D K-T1b_1024(L E D全彩双通道单机控制器) J S-D K-T2b_1024(L E D全彩四通道单机控制器) J S-D K-T4b_1024(L E D全彩四通道单机控制器) J S-D K-T8b_1024(L E D全彩八通道单机控制器)一、概述J S-D K系列L E D全彩控制器目前上市九款:包括J S-D K-T1a_1024、J S-D K-T2a_1024、J S-D K-T4a_1024、J S-D K-T8a_1024、J S-D K-T1b_512、J S-D K-T1b_1024、J S-D K-T2b_1024、J S-D K-T4b_1024、J S-D K-T8a_1024。
L E D全彩同步控制器通过交流220V市电进行同步播放,可以多台联合使用。
L E D全彩灯单机控制器D C+5~+24V控制,只能单机使用。
L E D全彩同步控制器主要适用于:L E D模组、全彩穿孔灯、外控护栏管、灯条、全彩点光源等。
二、技术参数输入电压:同步控制器(交流220V,50H z市电)单机控制器(直流+5V~直流+24V)控制路数:J S-D K-T1a_1024(1路)、J S-D K-T2a_1024(2路)、J S-D K-T4a_1024(4路)、 J S-D K-T8a_1024(8路)、 J S-D K-T1b_512(1路)、J S-D K-T1b_1024(1路)、J S-D K-T2b_1024(2路)、J S-D K-T4b_1024(4路)、J S-D K-T8b_1024(8路)同步模式:自动检测50H工频信号(同步控制器)。
DMX512炫彩灯光控制器使用说明书要点

SC-DMX-2000 DMX512玄彩灯光控制器【使用说明书】REV 1.42009.05.14目录第一章产品简介............................................. 3 .1. 1 产品功能简介.......................................................... 3...1. 2 产品规格.............................................................. 3 ..1. 3 主要性能特点.......................................................... 3...1. 4 产品示意图............................................................ 4 ..1. 5 硬件接线情况说明...................................................... 5...第二章产品使用方法......................................... 7...2. 1 IP 地址的设定......................................................... 8...2. 2 Net Mask 的设定....................................................... 9...2. 3 Gateway 的设定 ........................................................ 9.2. 4 Mode & ID 的设定...................................................... 9...2. 5 Online/Offline 的设定................................................... 1..0 第三章联机系统操作......................................... 1..13. 1 组网方式 (11)3. 2 判断网络状况 (11)第四章对MMC/SD 卡的操作.................................. 1.2.4. 1 MMC/SD 卡格式化..................................................... 1..2.4. 2 场景文件的拷入与修改.................................................. 1..2.第五章机械尺寸与安装....................................... 1.3.第六章故障排除及维护....................................... 1.4.第一章产品简介1. 1 产品功能简介SC-DMX-2000 DMX51炫彩灯光控制器:SC-DMX-200CDMX51炫彩灯光控制器主要应用于以LED为光源的建筑景观和商业场所照明装饰。
巨人通力调试手册

目录升级CPU和DRV指导手册(最终版)机房控制柜打上紧急电动, 上电.6—16= 7 断电上电6—1= 11 断电上电1—99= 2 断电上电5—7—2 断电上电1—1 与锁梯层一致(1—72)1—2 6(该参数设置后外呼盒上会有运行箭头)1—12 有提前开门时设 4 无提前开门时设 01—13 01—18 单开门时设 1 双开门时设为 31—24 单开门时设 0 双开门时设为 1 1—42 11—71 31—72 锁梯返回层1—79锁梯时照明关闭=0锁梯时照明不关闭=11—83 11—92 11—930 双开门时设 11—9471—98 17—907—8007—8107—84显示当前位置 1显示下一位置 17—97 1 (锁梯时电梯返回锁梯层关门后外召显示关闭)6—1 116—2 16—26 1.56—28 1.76—34 1.7 (短层时可以小一些)6—60 01—30 基站层锁梯返回层1—32 反基站延时1—33 反基站功能选择1—44 司机功能1—60消防反回曾层1—6111 区域码1—62 1 消防功能选择1—50 为电梯号一号梯为1二号梯为2一类推1—56 为电梯台数1—41 Submenu 1为放到乱功能设为1Submenu2为消号功能设为11用户界面的操作手册 21.1 CPU用户界面的按钮 21.1.1用户界面的按钮 21.1.2 LCE™用户界面的LEDs和按钮71.2变频器用户界面141.2.1面板操作说明142. 慢车运行前需做步骤162.1 修改CPU参数162.2 设置变频器162.2.1同步曳引机162.2.2异步曳引机203.快车调试243.1 DRV抱闸延时调整243.2轿顶检修箱内CCBS拨码开关位置调整243.3 井道自学习243.4 减速距离学习253.5 显示程序设置253.6 减速距离学习25 附录1:参数表28 附录2:OPT拨码开关位置表60 附录3:选项功能缩写62 1用户界面的操作手册1.1 CPU用户界面的按钮1.1.1用户界面的按钮按钮和显示屏1.功能模式2.功能模式的显示3.楼层(轿厢位置)4.新楼层(目标楼层)5.增加数值/楼层6.选择数值/接受7.上召8.内召9.限速器测试10.子菜单11.数值(调整值)12.减小数值/楼层13.下召14.缓冲测试下例描述了召梯的步骤。
LED七彩控制器产品使用说明介绍

每回路<10A(键控制器
名称:无线8
型号:
概述
无线8键控制器采用先进电脑控制芯片,用于控制各种以led 为光源的灯具,例如:点光源,软光条,洗墙灯,玻璃幕墙灯等;具有掉电存储,指示灯同步显示等,同时具有价格低廉,接线方便,使用简单等优点;根据客户实际需求可实现跳变、渐变、频闪等灯光变化效果。
技术参数
● 工作温度:-20-60℃ ● 供电电压:
● 输出:3回路 ● 连接方式:共阳
● 外型尺寸:121mmX53mmX25mm ● 包装尺寸:150mmX76mmX51mm ● 净重:255g ● 毛重:285g ● 静态功耗:<1W
● 输出电流: ) ● 输出功率:
DSC-8RF1230-Z0112-24V 360W
外型尺寸
接口说明
电源输入接口:
采用带螺丝接线柱
负载输出接口:
采用带螺丝接线柱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
JK12CX00X系列七彩控制器使用说明书
JK12CX00X系列控制器专用于LED灯饰,采用目前最先进的PWM(脉宽调制)数字化控制技术;可以实现不同颜色的切换/渐变/跳变,亮度/速度调节功能,广泛适用于亮化工程,KTV,酒吧,广告标牌等应用,主要适用于直流5V/12V/24V LED单色或者七彩软/硬灯带,LED穿孔灯,LED模组等。
二、性能特点
1、既能手动控制,还能遥控控制,丢失遥控器也不要紧。
任意控制器和任意遥控器同时按A和D键完成对码,十分便捷!
2、当灯光为单色模式时,+ - 按钮为变亮变暗;闪烁或者变色模式时,+ -按钮为增减速。
极其方便!
3、PWM信号转换+消除电流浪涌程序设计,LED寿命达到最大;
4、19种静态+19种动态模式,既适用七彩,又适用单色;
5、DC5-24V宽电压供电,同一产品直接可控制穿孔灯、模组、灯带、护栏管,使用更加广泛;
6、超出控制器负载范围时,可以连接功率扩展器放大功率,确保同步效果一致,无任何延时;
7、有永久记忆功能,设置好的效果不会因断电而重新设置
8、采用高速芯片处理数据,无延时,无抖动。
9、非控制器/电源一体设计,使用可靠,维修方便,配置灵活。
三、颜色变化效果
19
19
四、使用方法
使用之前请先按照第五节和第六节图例正确接线:
JK12CD30Y户内遥控手控两用
MODE(模式)键切换灯光变化模式;S/B+(增加)键在单色模式下增加亮度,在动态模式下增加速度;S/B-(减小)键减少亮度和降低速度
JK12CW30T户外带同步不带遥控
控制器本体不带按键,对照第六节根据实际效果和速度把所有控制器拨码开关放一致位置,同步交流位置通上交流电,所有控制器同时上电即可。
JK12CL06M迷你型带红外遥控
MODE(模式)键切换灯光变化模式,SPEED/BRIGHT(速度/亮度)键从高到低循环在单色模式下调节亮度,在动态模式下调节速度,长按此键关闭灯光;COLOR键调节各种静态颜色.
五、控制器连接示意图
六、多个控制器灯光同步的实现
在某些需要多个控制器同步的场合,除了采用七彩控制器+放大器的方法;还可以直接使用带同步功能的七彩控制器JK12CW30T,这款控制器可以户外使用,增加了两个同步端子,将这两个同步端子连接到AC220V交流市电(分清火线L 零线N),每个控制器的七彩变换模式拨码开关调整一致(每拨动一个模式编码对应一种效果,每拨动一个速度变化对应一级速度,速度等级值越大,速度越慢),把所有控制器同时通电,即可达到同步效果。
注意此同步端子如果不接220V交流电,控制器没有输出,灯不亮!
七、工程中常用的控制器和放大器接线方式
上图是串联接线,下图是并联接线。
控制器和放大器串联接线,回路比较简单;并联接线则更可靠。