飞思卡尔 主板 原理图
飞思卡尔XS12芯片资源介绍PPT课件
DG128 .16位CPU12 .25MHz .锁相环(PLL) .BDM(单线背景调试)
.标准中断嵌套 .低电压检测/中断
08.11.2020
谐振器 模数转换器(ADC)
定时器
其它
08.11.2020
.XOSC电路增强了动态 控制输出幅度的能力
.低功耗和强抗噪 .节省外围器件
.8/10/12位精度,转换 时间低于2.12微秒
08.11.2020
❖ 6、PWM波形对齐寄存器PWMCAE
PWMCAE 寄存器包含 8 个控制位来对每个 PWM 通道设置左对齐 输出或中心对齐输出。 用法: PWMCAE_CAE0 = 1 --- 通道0 中心对齐输出
PWMCAE_CAE7 = 0 --- 通道7 左对齐输出 注意:只有输出通道被关闭后才能对其进行设置,即通道被激活后不能 对其进行设置。
08.11.2020
❖ 7、PWM控制寄存器PWMCTL
用法: PWMCTL_CON67=1 --只有 7 通道的控制字起作用,原通道7的使能位、PWM输出极性选 择位、时钟选择控制位以及对齐方式选择位用来设置级联后的PWM输出 特性
PWMCTL_CON67=0 --- 通道 6,7 通道不级联 CON45、CON23、CON01 的用法同 CON67 相似。设置此控制字 的意义在于扩大了 PWM 对外输出脉冲的频率范围。 PSWAI=1 --- MCU 一旦处于等待状态,就会停止时钟的输入。这 样就不会因时钟在空操作而费电;当它置为 0,则 MCU 就是处于等待 状态,也允许时钟的输入。 PFRZ=1 --- MCU 一旦处于冻结状态,就会停止计数器工作。
ClockA、ClockB的值为总线时钟的1/2n (0≤n≤7)
飞思卡尔S12系列单片机系统硬件设计
飞思卡尔S12系列单片机 系统硬件设计By DEMONEmail:Wangpanbao@智能车制作网站出版目录第一节 MC9S12DG128B功能概述 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第1页第二节时钟电路设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第4页第三节S12单片机系统滤波电路设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第6页第四节单片机电源电路设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第8页第五节S12系列单片机IO接口电路设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>第11页第六节单片机复位电路的设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第14页第七节BDM接口电路设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第16页第八节RS232串行通讯电路设计 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第17页第九节S12单片机的运行模式 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第21页第十节使用DXP设计单片机系统 >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>第22页第一节 MC9S12DG128B功能概述MC9S12DG128B是飞思卡尔半导体公司的汽车电子类产品,早在飞思卡尔还没有从摩托罗拉分离出来前就已经诞生了。
飞思卡尔 PWM机理【转】
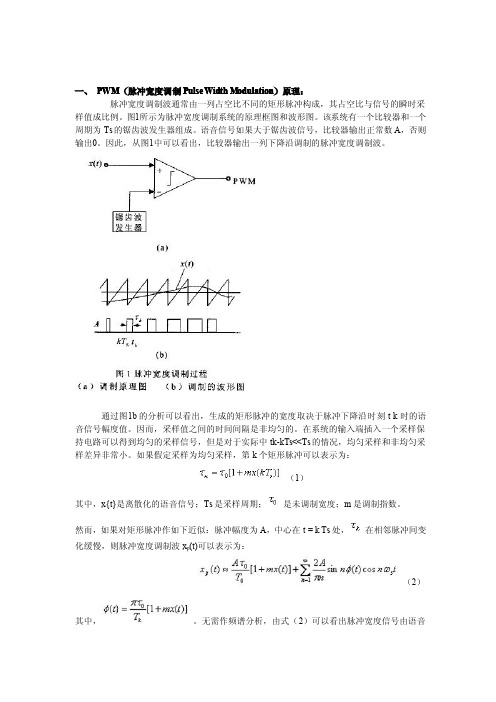
Width Modulation)原理:PulseWidth一、PWM(脉冲宽度调制Pulse脉冲宽度调制波通常由一列占空比不同的矩形脉冲构成,其占空比与信号的瞬时采样值成比例。
图1所示为脉冲宽度调制系统的原理框图和波形图。
该系统有一个比较器和一个周期为Ts的锯齿波发生器组成。
语音信号如果大于锯齿波信号,比较器输出正常数A,否则输出0。
因此,从图1中可以看出,比较器输出一列下降沿调制的脉冲宽度调制波。
通过图1b的分析可以看出,生成的矩形脉冲的宽度取决于脉冲下降沿时刻t k时的语音信号幅度值。
因而,采样值之间的时间间隔是非均匀的。
在系统的输入端插入一个采样保持电路可以得到均匀的采样信号,但是对于实际中tk-kTs<<Ts的情况,均匀采样和非均匀采样差异非常小。
如果假定采样为均匀采样,第k个矩形脉冲可以表示为:(1)其中,x{t}是离散化的语音信号;Ts是采样周期;是未调制宽度;m是调制指数。
然而,如果对矩形脉冲作如下近似:脉冲幅度为A,中心在t=k Ts处,在相邻脉冲间变化缓慢,则脉冲宽度调制波x p(t)可以表示为:(2)其中,。
无需作频谱分析,由式(2)可以看出脉冲宽度信号由语音信号x(t)加上一个直流成分以及相位调制波构成。
当时,相位调制部分引起的信号交迭可以忽略,因此,脉冲宽度调制波可以直接通过低通滤波器进行解调。
二、数字脉冲宽度调制器的实现:实现数字脉冲宽度调制器的基本思想参看图2。
图中,在时钟脉冲的作用下,循环计数器的5位输出逐次增大。
5位数字调制信号用一个寄存器来控制,不断于循环计数器的输出进行比较,当调制信号大于循环计数器的输出时,比较器输出高电平,否则输出低电平。
循环计数器循环一个周期后,向寄存器发出一个使能信号EN,寄存器送入下一组数据。
在每一个计数器计数周期,由于输入的调制信号的大小不同,比较器输出端输出的高电平个数不一样,因而产生出占空比不同的脉冲宽度调制波。
图3为了使矩形脉冲的中心近似在t=kTs处,计数器所产生的数字码不是由小到大或由大到小顺序变化,而是将数据分成偶数序列和奇数序列,在一个计数周期,偶数序列由小变大,直到最大值,然后变为对奇数序列计数,变化为由大到小。
epson主板电路原理

1600K3并口:1600K3并口简单的说,就是信号通过接口CN1,经过电阻电容、缓冲芯片74LS07,然后到门阵IC2。
主机送往打印机信号:并口数据:并口数据通过上拉电阻RM3、RM4,串联电阻RM1、RM2连接到门阵。
如果这部分电路坏了,数据就会接收错误,导致打印不正确。
STB(并口1脚):并口触发信号或者叫并口同步信号,是主机告知打印机有数据到。
如果这部分电路有问题,则有可能主机数据都送完了,而打印机根本不知道。
SLIN(并口36脚):主机选择信号,告知打印机,主机处于有效状态。
一般没有什么用; AFXT(并口13脚):自动进纸信号。
信号为低的时候,打印机自动进纸。
一般也没什么用; INIT(并口14脚):打印机初始化信号。
如果这个信号有个低脉冲,则打印机复位。
如果信号一直为低,则很多打印机都一直处于复位状态,导致看上去打印机开机没有任何反应。
有好几次客户反映说打印机开机没有任何反应,结果发现是他们的主机死机了。
打印机送往主机的信号: ACK(并口10脚):并口应答信号,大部分时间为高电平,低脉冲告知主机,打印机已经接收完数据。
有很多终端对这个信号不作处理。
BUSY(并口11脚):并口忙信号,高电平告知主机,打印机正在接收数据,很忙,你千万不要再送数据下来。
低电平则表示现在可以接收数据。
有些打印机在这个信号上加了电容,或者是上拉电阻太大,导致信号反应速度比较慢,导致接收数据时丢数据。
这时可以把电容去除或者再把上拉电阻变小一些。
有些改了这些还是不能用,则需要把主机的并口模式改成兼容模式或者SPP模式。
此信号可导致不联机 PE(并口12脚):打印机缺纸信号。
高电平表示缺纸。
此信号可导致不联机 SLCT(并口15脚):打印机选通主机信号。
高电平表示打印机有效。
此信号可导致不联机 ERR(并口32脚):打印机出错信号。
低电平表示打印机出错。
此信号可导致不联机LOGH(并口16脚):打印机有效信号。
飞思卡尔电路
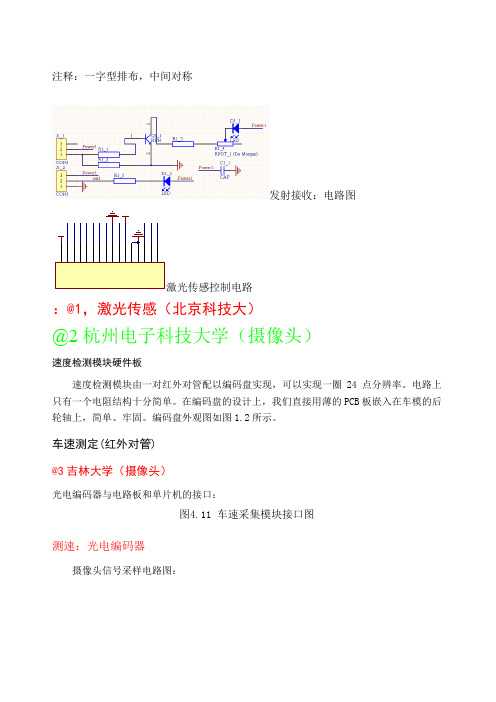
注释:一字型排布,中间对称发射接收:电路图激光传感控制电路:@1,激光传感(北京科技大)@2杭州电子科技大学(摄像头)速度检测模块硬件板速度检测模块由一对红外对管配以编码盘实现,可以实现一圈24点分辨率。
电路上只有一个电阻结构十分简单。
在编码盘的设计上,我们直接用薄的PCB板嵌入在车模的后轮轴上,简单、牢固。
编码盘外观图如图1.2所示。
车速测定(红外对管)@3吉林大学(摄像头)光电编码器与电路板和单片机的接口:图4.11 车速采集模块接口图测速:光电编码器摄像头信号采样电路图:图5.3摄像头信号采样电路图:5v电压电路合肥工大:光电(两层排布)光栅盘测速,如图3.10 所示。
光栅盘是从机械鼠标上拆下来,总共有50个齿。
将栅盘直接用热熔胶粘接在后轮传动轴上,避免了打滑的可能。
在栅盘的正下方安装槽型光耦(又称光断续器,实际也是红外光电对管)。
当发射的光线被栅齿挡住,接受端管子应该截止,但该栅齿附近间隙仍有光透过并被接受到,所以截止的不够彻底;同理,本该完全导通时也没有完全导通。
所以接收端接受到的信号实际是连续变化的信号,类似于正弦波,而不是理想的脉冲方波信号。
需要在后级信号调理电路中,加上放大级和比较级电路就可得到与TTL电平兼容的脉冲方波信号。
(乐山师范):单个传感器检测电路速度检测:ST150为单光束直射取样式光电传感器,它由高输出的红外光电二极管与高灵敏度光敏晶体管组成北京理工(第二届)(直射型光电传感器方案。
)由速度传感器可以获得一个脉冲信号,该信号直接进入S12 芯片的ETC 模块,经程序计算后便可获得当前车速,其电路原理图如上。
广工一队(第一届)图 2.2 红外发射驱动电路图2.3红外接收电路红外发射管不是同时点亮,而是隔足够远的距离的两个发射管同时点亮。
这样就可以把邻近干扰降到最底了。
实际测量中使用1.6cm长,直径为3mm的黑色套管套住红外接收管时,发射管发射的红外线对相隔一个管的红外接收的干扰几乎已经很小了。
飞思卡尔s12单片机-ATD模块

Page 6
二、ATD模块简介
•
• • • • • • •
第十章 单片机片内外模块 ——ATD
S12单片机ADC特性如下:
8/10/12位可选
转换速度较高,8位、8MHz、单次转换时间为2us 采样时间可编程设置 多种转换模式:数据对齐方式、单次/连续转换、转换结果比较 外触发控制 转换序列结束可产生中断,能够使能比较中断 模拟输入引脚与通用I/O口复用 多通道扫描, 1~16 转换序列长度。
ETRIGLE –外部信号触发条件选择位 ETRIGP -
ACMPIE - Internal Clock in Stop Mode Bit 0 = 禁止比较中断 1 = 使能比较中断
ATD Registers 4/12 第十章 单片机片内外模块 ——ATD
ATD Control Register 3 (ATDCTL3)
Page 10
ATD Registers 1/12 第十章 单片机片内外模块 ——ATD
ATD Control Register 0 (ATDCTL0)
WRAP[3-0] - Wrap Around Channel Select
0 = Reserved
X = WRAP[3:0]; 多通道转换模式下,从ANx回绕到AN0 1≤x ≤ 15 仅在ATDCTL5的MULT=1时有效
S8C, S4C,S2C, S1C - Conversion Sequence Length
ATD Registers 5/12 第十章 单片机片内外模块 ——ATD
ATD Control Register 4 (ATDCTL4)
注:写ATDCTL4会终止当前转换序列
SMP[2:0] - Sample Time Select, 采样时间包含的ATD时钟周期
飞思卡尔 硬件分析
系统硬件电路由驱动电路板和核心控制板两部分组成:一、电机驱动模块:驱动电路板安装在车体后部,它主要负责系统各部分电压的分配以及电机的驱动。
由于这部分电路功耗较大,单独设计一块电路板后可使散热性能更好。
目前电路板上将两片33886并联,PWM信号一路直接输入到A1,一路经过反向后输入到A2。
这样如果PWM波的占空比高于50%时,电机朝一个方向转;占空比低于50%时,电机朝另一个方向转。
通过这种方式,可以在程序中实现反向制动,而这对于赛车在直道上提高速度是有帮助的。
(但是今年的C车车模有两个电机,这两天我会研究下两个电机怎么控制)33886制定的参数范围是-40°C≤TA≤125 °C、5.0V≤V+≤28V。
集成电路也可以工作在40V通过降低规定的定额值。
集成电路能够在表面安装带散热装置的电源组件.(听说还有一种驱动芯片也不错,可是没有研究过)二、系统电源模块:全部硬件电路的电源由7.2V、2A/h的可充电镍镉电池提供。
由于电路中的不同电路模块所需要的工作电压和电流容量各不相同,因此电源模块应该包括多个稳压电路,将充电电池电压转换成各个模块所需要的电压。
主要包括如下不同的电压:A、5V电压。
主要为单片机、信号调理电路以及部分接口电路(如速度传感器)提供电源,电压要求稳定、噪声小,电流容量大于500mA。
B、6V电压。
主要是为舵机提供工作电压。
实际工作时,舵机所需要的工作电流一般在几十毫安左右,电压无需十分稳定。
C、7.2V电压。
这部分直接取自电池两端电压,主要为后轮电机驱动模块提供电源。
D、12V电压。
采用摄像头进行道路检测时,需要12V工作电源。
整个电源模块的电路结构为:由于CCD需要12V供电,而且CCD供电电压过高容易使CCD发热,虽然短时间内信号质量将提高,但长时间会使CCD输出信号质量下降,而CCD供电电压过低会使CCD信号质量降低。
为了保证CCD的正常供电,12V电路较为复杂且占用电路板空间较大。
飞思卡尔单片机AD功能模块课件

加快AD转换速度
通过优化硬件设计和配置,例如选择更高转换速率的 ADC器件,或者在软件中实现并行处理和快速算法来加 快AD转换的速度。
提高电源稳定性
通过优化电源设计和供电方式,例如使用线性稳压器降低 电源电压的波动,或者在软件中实现电源监控和保护机制 来提高电源的稳定性。
06 未来展望与研究方向
AD功能模块的技术发展趋势
飞思卡尔单片机AD 功能模块课件
目录
• 飞思卡尔单片机简介 • AD功能模块概述 • 飞思卡尔单片机AD功能模块详解 • AD功能模块的应用实例 • AD功能模块常见问题与解决方案 • 未来展望与研究方向
01 飞思卡尔单片机简介
单片机的基本信息
定义
单片机是一种集成电路芯片,采用超大规模集成电路技术将 CPU、随机存储器、程序存储器、定时器/计数器、串行通信 接口等集成在一块芯片上,构成一个微型的计算机系统。
B
C
可靠性高
飞思卡尔单片机经过严格的质量控制和可靠 性测试,能够在恶劣的环境条件下稳定工作 。
开发工具丰富
飞思卡尔单片机提供了丰富的开发工具和软 件库,方便用户进行开发和调试。
D
飞思卡尔单片机的应用领域
智能仪表
飞思卡尔单片机广泛应 用于各种智能仪表,如 智能电表、智能水表等 。
工业控制
由于其高性能和可靠性 ,飞思卡尔单片机在工 业控制领域也有广泛的 应用。
AD转换器出现。
集成化
随着物联网和嵌入式系统的发展,对设备的功耗要求 也越来越高,未来将会有更低功耗的AD转换器出现。
AD功能模块的应用前景与挑战
应用前景
随着物联网和智能化的发展,AD功能模块的应用前景非常广泛,如智能家居、 智能仪表、医疗设备等领域都有广泛的应用。
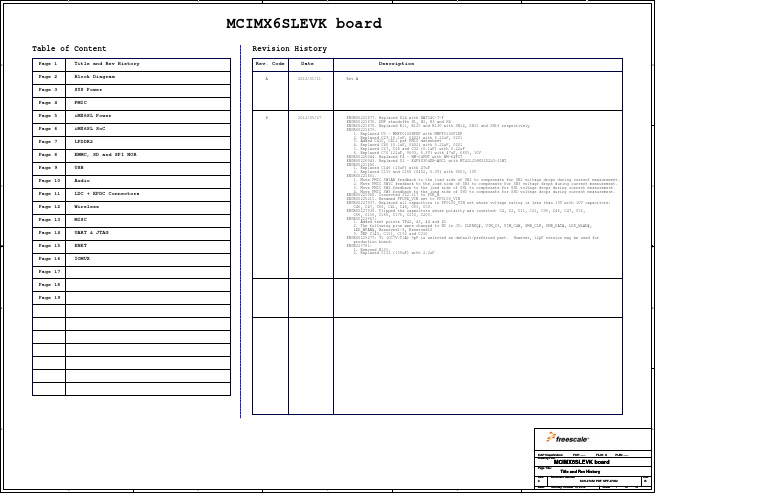
MCIMX6SLEVK飞思卡尔A9 1GHz高性能处理器原理图
PWR Cut Switch For SW Development
B
Secondary Charge Source USB or Wireless Charger
Note: Shunt 2-3 to experiment with USB charging. Use cable to pins 1 and 2 to experiment with wireless charging
A
chg_en
14 12 29
GND
C19 22UF 0805_CC 10V
SH14 SH0805_40 BATT J2
led1_2 GND
C20 10uF CC0603_OV 10V GND
A
D11 LED Green GND
D6 LED Red
BAT1 BAT2
21 20
3 2 1
GND BATT_TEMP CON_1X3
CON_1_PWR wall_filter
R1 0.1 DNP 0603_CC
1
4
R3 10K 0402_CC SHUTDOWN_B Q2A MBT3906DW1T1
C
1 2 3
R2 2.7K 0805_CC wall_ov_ctl R4 10K wall_ov_base 2 0402_CC
1 2 3
1
Rev B of 16
Sheet
1
5
4
3
2
1
MCIMX6SLEVK board Diagram
D D
C
C
B
B
A
A
ICAP Classification: Drawing Title: Page Title:
飞思卡尔PWM模块讲解
Created with SmartPrinter trail version
Clock SA 是通过对PWMSCLA 寄存器的设置来对 ClockA 进行分频而产生 的。其计算公式为: Clock SA=Clock A /(2*PWMSCLA) PWMSCLB 寄 存 器 与 PWMSCLA 寄 存 器 相 似 , Clock SB 就 是 通 过 对 PWMSCLB 寄存器的设置来对ClockB 进行分频而产生的。其计算公式为: Clock SB=Clock B /(2*PWMSCLB) 1、PWM 极性选择寄存器 PWMPOL PWMPOL 寄存器每一位如图 7 所示:
图8
PWMCAE 寄存器
PWMCAE 寄存器包含8 个控制位来对每个PWM 通道设置左对齐输出 或中心对齐输出。 用法: PWMCAE_CAE0 = 1 --- 通道 0 中心对齐输出 PWMCAE_CAE7 = 0 --- 通道 7 左对齐输出 注意:只有输出通道被关闭后才能对其进行设置, 即通道被激活后不能对其进行 设置。 1、PWM 控制寄存器 PWMCTL PWMCTL 寄存器每一位如图9 所示:
图12 PWMCNT0 寄存器 计数器以所选时钟源的频率运行。 计数器在任何时候都可以被读, 而不影 响计数,也不影响对PWM 通道的操作。 任何值写入 PWMCNT0 寄存器都会导致计数器复位置 0,且其计数方向 会 被设置为向上计数, 并且会立刻从缓冲器载入任务和周期值, 并会根据翻转 极性的设置来改变输出。当计数器达到计数值后,会自动清零。只有当通道使 能后,计数器才开始计数。 2、PWM 通道周期寄存器 PWMPERx PWMPERx 寄存器共有8 个, 每一个通道都有一个这样的周期寄存器。 这 个 寄存器的值就决定了相关PWM 通道的周期。 每一个通道的周期寄存器都