基于PC104与C8051F120的水下机器人环境监测系统设计方案
水下机器人的控制系统设计与优化

水下机器人的控制系统设计与优化一、简介水下机器人是一种用于进行海底勘探、海洋生物学研究、深海资源开发等工作的自主机器人。
与陆地机器人不同,水下机器人具有很高的工作难度和环境复杂性,因此需要设计和优化高效可靠的控制系统,保证水下机器人完成各项任务。
二、控制系统设计水下机器人的控制系统由软件和硬件两部分组成。
软件部分负责控制机器人的运动、掌握深度、航速、方向和姿态控制等关键功能。
此外,软件还需要具备对机器人状态、水压、水温等数据的实时监测、反馈和报警功能。
硬件部分则负责控制机器人的执行机构,包括马达、泵、阀门、舵机等。
1. 系统架构系统架构是一项复杂的任务,需要考虑到机器人的工作性质、任务需求、现有技术和资金预算等因素。
一般来说,水下机器人的系统架构包括机械结构、传感器、计算机、执行机构和电源等部分,其中机械结构负责提供机器人的浮力和运动机构,传感器负责监测水下环境和机器人状态,计算机负责控制机器人运动和反馈控制信息,执行机构负责实现机器人运动控制,而电源则负责提供机器人的电能。
2. 系统集成在控制系统设计过程中,需要充分考虑各模块之间的兼容性和协作性。
例如,机械结构和执行机构需要和传感器、计算机等部分相互连接和协调工作。
此外,控制系统还需要通过数据总线、接口板等方式进行数据交换和协调控制。
3. 系统优化水下机器人的控制系统需要经过实际测试和验证后才能上线使用。
在工作过程中,还需要根据任务需求和环境变化来不断对控制系统进行优化,以提高机器人的性能和可靠性。
例如,可以通过改善机器人的舵机或电机性能,提高机器人的运动控制精度和稳定性,或是通过优化传感器算法,提高机器人的状态感知和反馈控制能力。
三、实验验证水下机器人的控制系统要进行实验验证,以提高其性能和可靠性。
实验验证包括模拟实验和实物实验两部分。
在模拟实验中,可以利用仿真软件模拟机器人的工作流程,验证各个控制模块之间的兼容性、协作性和控制精度等。
在实物实验中,可以利用真实的机器人模型或原型,进行机器人控制和状态监测方面的实验验证。
基于PC104水下检测特种车控制系统设计
1 引 言
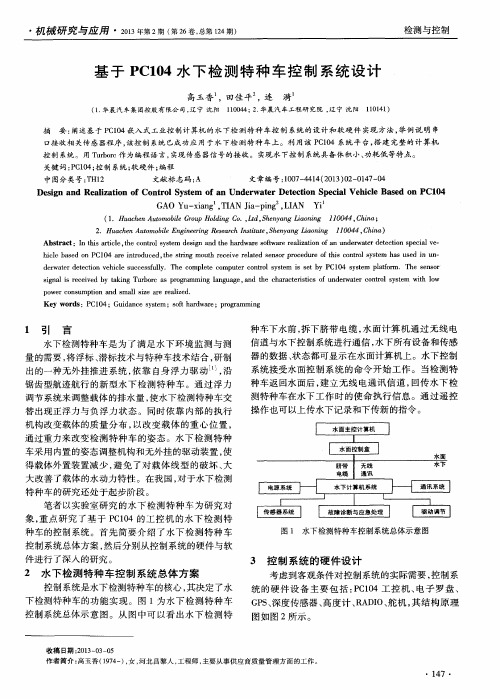
水下 检测 特种 车 是 为 了 满 足水 下 环 境 监 测 与 测 量 的需要 , 将 浮标 、 潜标 技术 与特 种 车技术 结合 , 研 制
种 车下 水前 , 拆 下脐 带 电缆 , 水 面计 算 机 通 过 无 线 电 信 道 与水下 控制 系 统进行 通 信 , 水 下所 有设 备 和传感 器 的数 据 、 状态 都 可显示 在水 面计 算 机上 。水 下控 制 系统接 受 水面 控 制 系 统 的命 令 开 始 工 作 。 当检 测 特 种 车返 回水面后 , 建立 无 线 电通 讯 信 道 , 回传 水 下 检 测 特种 车 在水 下工 作 时 的使 命 执 行 信 息 。通 过 遥 控 操作 也可 以上 传水 下记 录 和下传 新 的指令 。
摘
要: 阐述基 于 P C 1 0 4嵌入 式工业控 制计算机的水 下检 测特 种车控 制 系统的设 计和软硬 件 实现方 法 , 举 例说 明 串
口接 收相 关传感器程序 , 该控制 系统 已成功应 用于水 下检 测特 种车上 。利用该 P C 1 0 4系统平 台, 搭 建完整 的计 算机
Ab s t r a c t :I n t h i s a r t i c l e , t h e c o n t r o l s y s t e m d e s i g n a n d t h e h a r d wa r e s o f t wa re r e a l i z a t i o n o f a n u n d e r wa t e r d e t e c t i o n s p e c i a l v e - h i c l e b a s e d o n P C1 0 4 a r e i n t r o d u c e d . t h e s t i r n g mo u t h r e c e i v e r e l a t e d s e n s o r p r o c e d u r e o f f b i s c o n t r o l s y s t e m h a s u s e d i n u n — d e wa r t e r d e t e c t i o n v e h i c l e s u c c e s s f u l l y .T h e c o mp l e t e c o mp u t e r c o n t r o l s y s t e m i s s e t b y P C1 0 4 s y s t e m p l a t f o r m. T h e s e n s o r s i g n a l i s r e c e i v e d b y t a k i n g T u r b o r c a s p r o g r a mmi n g l a n g u a g e, a n d t h e c h a r a c t e i r s t i c s o f u n d e wa r t e r c o n t r o l s y s t e m wi t h l o w p o w e r c o n s u mp t i o n a n d s ma l l s i z e a r e r e li a z e d . Ke y wo r d s :P C 1 0 4;Gu i d a n c e s y s t e m ;s o f t h rd a wa r e;p r o g r a mmi n g
水下机器人的控制系统设计及实现
水下机器人的控制系统设计及实现第一章引言随着科技的进步,水下机器人在海洋勘探、救援、海底管道维护等领域扮演着越来越重要的角色。
而一个高效稳定的控制系统是水下机器人能够顺利完成任务的关键之一。
本文将重点介绍水下机器人控制系统的设计及实现。
第二章水下机器人的控制系统概述水下机器人的控制系统主要由感知模块、数据传输模块、控制器和执行机构四部分组成。
感知模块负责收集环境信息,数据传输模块将信息传输给控制器,控制器根据接收到的信息制定控制策略,并通过执行机构实现运动控制。
第三章感知模块设计与实现感知模块的主要任务是获取水下环境的相关信息,包括水温、水压、水质、水流速度等。
针对不同的任务需求,可以采用不同的传感器,如温度传感器、压力传感器、水质传感器和流速传感器等。
这些传感器将信息传输给控制系统的数据传输模块,为后续的控制策略制定提供准确的数据支持。
第四章数据传输模块设计与实现数据传输模块起着枢纽的作用,将感知模块收集到的信息传输给控制器,并将控制器制定的控制策略传输到执行机构。
传统的通信方式包括有线通信和无线通信,对于水下机器人而言,由于受到水的传输特性的限制,无线通信往往是首选。
可以使用声波、电磁波等方式进行数据传输,同时还需要考虑通信的稳定性和抗干扰能力。
第五章控制器设计与实现控制器是整个系统的核心,其负责根据感知模块和数据传输模块提供的信息制定控制策略,并将策略传输给执行机构。
控制器的设计主要包括传感器数据处理、控制策略制定和控制指令生成等三个方面。
其中,传感器数据处理过程中需要进行数据滤波、数据融合等处理,控制策略制定需要将感知信息与任务要求进行匹配并确定最优策略,控制指令生成则需要根据策略生成具体的指令。
第六章执行机构设计与实现执行机构主要实现控制器制定的控制策略,包括机械臂、推进器等。
机械臂用于完成需要进行物体抓取、搬运等操作的任务,推进器用于水下机器人的运动控制。
执行机构的设计和选型需要考虑机械结构的稳定性、推进力的大小和方向控制等因素。
基于PC104与C8051F120的水下机器人环境监测系统设计

( S c h o o l o fE n e r g y a n d P o w e r E n g i n e e r i n g , Y a n g z h o u U n i v e r s i t y , Y a n g z h o u 2 2 5 0 0 7 , C h i n a )
Ab s t r a c t : I n o r d e r t o r e a l i z e t h e mo n i t o i r n g a r o u n d t h e u n d e r w a t e r v e h i c l e ,t h e d e s i g n o f t h e u n d e wa r t e r v e h i c l e e n v i r o n me n t mo n i t o r i n g s y s t e m b a s e d o n P C1 4 0 a n d C 8 0 5 1 F 1 2 0 i s d e s i g n e d i n t h i s p a p e r . T h e h a r d wa r e s y s t e m i s u s e d t o c o l l e c t d a t e o f
关键 词 :P C1 0 4;C8 0 5 1 F1 2 监 测
中图分类号: T P 3 0 2
文献标识码 : A
文 章 编 号 :1 6 7 4 — 6 2 3 6 ( 加1 3 ) 2 4 — 0 o 4 2 一 O 4
De s i g n o f u nde r wa t e r v e hi c l e e n v i r o n me nt mo n i t o r i ng s y s t e m ba s e d o n PC1 0 4 a n d C8 0 5 1 F1 2 0
基于PC104的超高速水下航行器测控程序设计与实现
・பைடு நூலகம்7・ 5
基 于 P 14的 超 高 速 水 下 航 行 器测 控程 序 C0 设计与实现
王亚东 , 袁绪龙 , 张字文
( 西北工业大学 航海学 院, 陕西 西安 707 ) 102
摘 要 : 高速 水 下航行 器 自主航 行试 验 需要 雷裁 计算 机提 供 时序 控 制 、 态 自动 控 制 等 支持 , 恶 劣 水 超 姿 在
Ab t a t T e u ta h g ・p e u o o u n e ae e il a i ai n t ssa e s p o td b o u e s i sr c : h l - ih ・ e d a t n mo su d r trv h c e n vg t e t r u p re y c mp tr n r- s w o t r ft — e e d n ci n n e i l t n c n r 1 T e r l b l y o e me s r n o to y t ms emso me d p n e t t sa d v h ce mo i o t . h ei i t ft a u e a d c n r ls s i a o o o a i h e
i ey i o t n c us ft e a v r e u d r ae n io me t whih i h a i fg ti g r a ih a a sv r mp ra tbe a e o h d e s n e w t re vr n n , c s t e b ss o etn e lf g td t l
a d r s a c i g t e n ’g t n c n r1 I i C1 mb d e y tm n t n a d C l n u g , r ga n e e r h n a - ai o t . n ad o P 0 e e d d s se a d sa d r a g a e a p o r m h  ̄ i o o f 4 i d s n d a c r i g t e r q i me t f a i ain c n r l n aa me s r . h y t m s sI O t o t l s e i e c o d n t e u r g o h e n v g t o t d d t a u e T e s se u e / c n r o n o o a o o
水下机器人控制系统的设计与实现
水下机器人控制系统的设计与实现随着科技的不断发展,水下机器人成为了探索海底、进行深海勘探的一种必备工具。
而水下机器人控制系统则是保障水下机器人顺利进行任务的核心。
本文将介绍水下机器人控制系统的设计与实现。
一、系统架构设计水下机器人控制系统的架构设计包括硬件、软件两部分。
硬件部分主要包括传感器、执行机构、控制器等,软件部分则包括控制算法、操作界面等。
1.传感器选择水下机器人的传感器需要具有一定的防水性能和高精度,同时要能够适应不同深度下的环境变化。
水下机器人常用的传感器有:(1)水压传感器:能够测量水下机器人在不同深度下的压强,为水下机器人控制提供数据支持。
(2)陀螺仪、加速度计、磁力计:组合使用,能够测量水下机器人的航向、姿态、加速度等基本参数。
(3)相机:能够拍摄水下环境的照片和视频。
2.执行机构选择水下机器人的执行机构需要具有较强的抗腐蚀性、高可靠性和精准性。
常用的执行机构有电机、液压缸、气动缸等。
3.控制器选型控制器是水下机器人控制系统的核心部件,需优先考虑防水性能,同时还要具备良好的数据处理和传输能力,以及强大的实时控制能力。
常用的控制器有PLC、单片机、嵌入式系统等。
4.控制算法设计控制算法的设计是决定水下机器人性能的重要因素。
由于水下机器人的复杂性,控制算法的设计需要考虑到航行、姿态控制、深度控制等方面的要求,并且要适应不同的海底情况。
常用的控制算法有PID控制、模糊控制等。
5.操作界面设计操作界面的设计是用户与系统进行交互的重要方式,需要保证界面简洁明了,同时还要具备易操作性和实用性。
二、系统实现方法系统实现方法主要包括传感器、执行机构、控制器等硬件的选购和连接,控制算法的编写以及操作界面的设计。
下面以一个自主水下机器人为例,具体阐述系统实现方法:(1)传感器选择:选用水压传感器、陀螺仪、加速度计、磁力计等传感器。
(2)执行机构选择:选用电机驱动舵机、水下推进器等执行机构。
(3)控制器选型:选用高性能防水工业计算机作为控制器。
基于C8051020单片机的水深数据采集系统的设计

基于C8051020单片机的水深数据采集系统的设计作者:周欢来源:《科技创新与应用》2013年第21期摘要:系统以C8051F020单片机为控制芯片,通过对超声波换能器接收到的波形数据进行采集处理、分析计算得出水底深度的水深数据采集系统。
该系统结构精密,控制方便,并可通过串口实时发送当前水深数据。
关键词:C8051;单片机;水深测量;数据采集1 引言在发明回声测深仪器以前,人们都是采用绳索铅锤的方法测量水深,在测量船航行过程中,每隔一定时间间隔,测量人员用系有铅锤的绳索放到水底,通过量测绳索上的标识刻度来读取当前水深值,这种测量方法既复杂又无法测量水底地貌的连续性,也很难发现水中的航行障碍物。
本文以超声波测距原理为研究对象,以C8051F020单片机为控制核心,以串口收发为传输接口,设计了一个基于超声波测距的水深测量系统。
2 系统组成及原理系统工作原理:系统通电后,先由C8051F020单片机发送脉冲信号使得超声波换能器里面的压电陶瓷做机械震荡,产生超声波信号,超声波信号在水中传输,经过水底反射回换能器,换能器把接收到的超声波信号再转化成电信号,即波形信号。
由于超声波在传输的过程中会不断衰减,而且水中也有一些干扰信号,故波形信号发送给单片机处理时需先滤波并做放大处理,单片机通过A/D采样采集处理后的波形信号,采集到的数据再通过软件算法处理,把计算得到的水深数据显示在128*64的液晶屏上,同时将水深数据采用一定的协议格式通过串口发送给外部接收仪器。
超声波测深原理:是利用超声波穿透介质并在不同介质表面会产生反射的现象,利用超声波换能器发射超声波,测出发射波和反射波之间的时间差来进行测量的。
声波在水中的传播速度为V,换能器发出超声波,声波经探头发射到水底,并由水底反射回到换能器被接收,测得声波信号往返行程所经历的时间为t,则:Z=Vt/2;同时根据换能器上固定杆的刻度可获知水面与探头之间的距离,即吃水深度,两者之和即为最终水深值。
基于人工智能的智能水质监测系统设计与实现
基于人工智能的智能水质监测系统设计与实现随着城市化进程的不断推进,水源的污染和水环境的恶化已经成为当今社会亟待解决的问题。
目前国内的水质监测主要是依靠固定采样和送检的方式,不仅费时费力,而且监测结果也存在时滞性和样本选取的不确定性等问题。
人工智能技术的兴起,为水质监测领域带来了一片新的蓝海,智能化水质监测系统的设计和实现已经成为了当前的研究热点。
一、智能水质监测系统的基本构成智能水质监测系统主要由数据采集模块、数据传输模块、数据处理模块和智能决策模块四大部分组成。
1. 数据采集模块:是系统采集监测点水质信息的关键模块,其目的是快速、准确地获取水质监测数据,以满足全面监测的需求。
传统的水质监测方法采用固定采样的方式,这种方式既费时又费力,而且存在采样不充分的问题。
智能水质监测系统则采用现代化的物联网技术,通过分布式无线传感器网络对水质监测点进行实时监测,从而可以精确地测量水中溶解氧、温度、PH值、浊度等一系列重要参数,并将监测数据上传到云平台进行分析处理。
2. 数据传输模块:主要负责将采集到的水质监测数据传输到云端服务器进行分析和处理。
在传输过程中,需要充分考虑数据安全和隐私保护,采用安全加密协议和认证授权机制等技术保障数据传输的安全性。
3. 数据处理模块:是系统对采集到的监测数据进行处理和分析的重要模块。
传统的水质监测方法通常采用人工读数和解读的方式,这种方式存在数据处理效率低、结果不准确的问题。
智能水质监测系统通过数据挖掘和机器学习技术对监测数据进行分析和处理,识别水体中的污染物种类和浓度,提供实例化分析和决策支持。
4. 智能决策模块:通过对采集数据的分析和处理,对当前的水质状况进行评估和预测,提供支持监测决策的定量化分析和评估。
同时,还可以根据监测数据和污染源控制措施等多方面因素提供环境管理建议和预警信息,为水环境管理和污染治理提供科学决策支持。
二、智能水质监测系统的技术实现实现智能水质监测系统,既需要具备物联网通信技术和水质监测技术等领域的专业技能,还需要掌握机器学习、数据挖掘和人工智能等技术。
水下机器人系统的优化设计与实现
水下机器人系统的优化设计与实现一、概述水下机器人是一种集成多种机电一体化技术的智能装备,其广泛应用于深海勘探、水下油气管道维护等领域。
在此过程中,水下机器人系统的优化设计与实现显得尤为关键。
文章将从环境感知、运动控制、自主导航和人机交互等方面进行探讨。
二、环境感知环境感知是指对水下环境的实时监测和分析。
初步检测使用声学探测方案,包括适应水下环境的定位系统、声源探测系统和声学通讯系统。
同时,通过加装电视机构和激光距离测量仪等设备获取图像信息,以实现深入了解水下环境的目的。
三、运动控制水下机器人在复杂的水下环境中执行任务,通常还需要应对海流、水域障碍和海底地形等综合因素。
针对这些要求,采用多自由度机械臂、独特的推进器和定向舵机等先进技术。
运动控制算法采用PID控制方法、自适应控制方法等控制方法,评估机器人在水下环境中的运动性能,以使其更加精准地抵达任务点。
四、自主导航在水下环境中,水流巨大、以及海水中的浮游生物等因素的影响下,水下机器人的导航与定位成为了一个大难题。
其中自主定位系统是水下机器人自主导航的关键技术之一。
对此,采用混沌算法、粒子滤波方法等机器人技术,实现对水下环境数据的处理。
此外,采用增强学习和强化学习等技术,使水下机器人完成自适应导航和智能路径规划。
五、人机交互设计人机交互界面是水下机器人系统的一个关键领域。
该界面应能让操作人员更加方便地与机器人进行通信、控制与监测。
针对此要求,应考虑操作员的人机交互方式,人机交互设备和人机交互软件,以及界面设计。
还可以增加根据机器人传感器输出数据和外部设备信息,增加水下机器人剪辑、信号分析、图像处理、控制器配置和故障排查等的人机交互功能。
六、总结整体而言,水下机器人的优化设计和实现涉及到多学科的交叉知识。
文章从四个方面探讨了水下机器人的环境感知、运动控制、自主导航和人机交互,在实现水下机器人的真正控制和操作中都发挥了重要的作用。
在以后的实践过程中,应不断累积经验,完善技术水平,形成完备的技术体系,为相应行业的快速发展提供关键技术支持,也为了保护海洋环境的平衡做出贡献。
基于单片机的智能水下目标检测识别系统设计

40 | 电子制作 2019年01月工捕捞。
但是,近年来潜水员在工作时遇难的报道屡见不鲜,究其原因还是潜水员的水下工作环境十分恶劣,险象迭生。
潜水员在水下长时间工作还容易患上诸如气体栓塞、减压病等疾病,甚至危及生命。
而且人工捕捞还存在效率较低,成本高昂等诸多弊端。
为实现水下物体的自动化捕捞,一款可提高海产品捕捞自动化程度的智能水下目标检测识别系统应运而生。
该系统具有如下优点:①可以大幅减少潜水员的工作量,降低潜水员罹患职业病的风险。
②有助于提高捕捞自动化程度,降低捕捞成本。
③大大提升水下捕捞工作的效率。
1 系统总体框架设计图1 基于单片机的智能水下目标检测识别系统的总体框架图本文设计了一款智能水下目标检测识别系统,该智能水下目标识别系统以jetson tx2为主控核心,通过电脑控制水下目标检测识别系统,实现水下目标物体的检测和识别,在渔业捕捞领域有重大应用前景。
该系统到达水下指定区域时,通过电脑开启水下目标检测识别系统的GPS 模块、图像识别模块以及双目摄像头。
图像识别模块开启后,系统将通过双目摄像头采集到的图像进行检测与识别,并通过后也可以通过在jetson tx2的GPIO 增加吸泵或机械臂等装置。
该智能水下目标检测识别系统可以检测并识别水下海产品,并提供海产品位置等有效信息,这对今后提升海产品捕捞的自动化程度有重要意义。
2 主要硬件设计■2.1 jetson tx2的基本配置jetson 2是基于 NVIDIA Pascal ™ 架构的 AI 单模块超级计算机,具有体积小、功耗低(7.5W)、计算能力强大等诸多优点。
本文以搭载ubuntu 系统的jetson tx2为主控核心,控制各模块协同工作。
其环境搭建过程如下:(1)前往英伟达官网下载ubuntu,至jetson tx2的SD 卡上。
下载地址:/drivers。
(2)配置环境①安装依赖库。
②安装BLAS。
BLAS (Basic Linear Algebra Subpro-grams)是一个基本线性代数库。
水下机器人及探测观测设备研发生产方案(二)

水下机器人及探测观测设备研发生产方案一、实施背景随着海洋探测技术的迅速发展,水下机器人及探测观测设备的需求逐渐增大。
为了满足市场需求,提高我国海洋产业的技术水平,我们计划进行水下机器人及探测观测设备的研发生产。
二、工作原理水下机器人主要采用防水材料和精密机械结构,搭载多种传感器,如深度传感器、水温传感器、流速传感器等,进行水下环境的实时监测和数据采集。
同时,水下机器人具备自动导航、避障、通信等功能,以实现深海探测的目的。
探测观测设备则以声纳技术为基础,通过声波在水中的传播特性,实现对水下地形、地貌、水文等信息的获取。
此外,探测观测设备还可以搭载摄像装置,将水下景象实时传输到地面设备,为科研人员提供直观的研究资料。
三、实施计划步骤1.市场需求调研:对国内外水下机器人及探测观测设备市场需求进行深入调研,确定目标市场和产品定位。
2.技术研究:开展防水材料、机械结构、传感器技术、自动控制、数据处理等方面的技术研究,为产品研发提供技术支持。
3.设备研制:结合技术研究结果,设计并制造水下机器人及探测观测设备样机。
4.实验测试:在实验室内进行设备的各项性能测试,包括防水性能、机械性能、传感器精度等。
5.现场试验:在合适的海域进行现场试验,验证设备的实际运行效果和数据采集精度。
6.产品定型:根据实验测试和现场试验结果,对产品进行优化和改进,最终确定产品定型。
7.批量生产:在确保产品质量的前提下,进行批量生产,以满足市场需求。
四、适用范围本产品适用于海洋科学研究、海洋资源开发、海洋环境监测等领域。
具体应用包括但不限于:海洋地质调查、海底矿产资源勘探、海洋生态研究、海洋环境保护等。
同时,本产品也可用于湖泊、水库等淡水环境的探测观测。
五、创新要点1.采用了先进的防水材料和机械结构设计,使设备能够在高压和水下环境下稳定运行。
2.结合了多种传感器技术,实现了对水下环境的全面监测和数据采集。
3.采用了先进的自动控制技术,使设备能够实现自主导航、避障、通信等功能。
基于水声通信的水下机器人控制与监测系统设计
基于水声通信的水下机器人控制与监测系统设计水下机器人是一种能够在水下环境中执行任务的先进设备,它被广泛应用于海洋科学研究、海洋资源开发、水下探测等领域。
然而,在水下环境中,无线电信号无法传播,因此水下机器人的控制与监测需要依靠其他的通信方式,其中水声通信被广泛运用于水下机器人的控制与监测系统设计中。
水声通信是通过水中传播声波来进行信息传递的一种通信方式。
与无线电通信相比,水声通信在水下环境中具有较高的传输速度、较低的传输损耗和更长的传输距离。
基于水声通信的水下机器人控制与监测系统设计,涉及到三个关键方面:水声传感器网络、通信协议及控制与监测系统。
首先,水声传感器网络是基于水声通信的水下机器人控制与监测系统的重要组成部分。
通过部署多个水声传感器,可以实时监测水下环境的温度、压力、水质等参数。
这些传感器节点通过水声通信将采集到的数据传输到中心控制节点,形成一个数据传输网络。
水声传感器网络的设计需要考虑节点的布置、通信距离、数据采集频率等因素,以满足系统对水下环境监测的需求。
其次,通信协议是基于水声通信的水下机器人控制与监测系统设计中的关键环节之一。
通信协议决定了各个节点之间的通信方式、数据格式以及通信的稳定性和可靠性。
目前,常用的水声通信协议包括FSK(频移键控)、ASK(振幅键控)和PSK(相位键控)等。
在设计通信协议时,需要考虑水声通信信道的特点,选择合适的调制方式和编码方案,以达到高速、长距离、抗干扰的通信效果。
最后,控制与监测系统是基于水声通信的水下机器人控制与监测系统设计的关键组成部分。
通过水声通信,可以实现对水下机器人的远程操控和监测。
控制与监测系统的设计需要考虑操控指令的传输速度与稳定性,监测数据的实时性与准确性。
同时,系统设计还要考虑到水下环境的复杂性和不确定性,采用合适的控制算法和传感器融合技术,提高水下机器人的自主性和适应性。
综上所述,基于水声通信的水下机器人控制与监测系统设计涉及到水声传感器网络、通信协议及控制与监测系统三个关键方面。
水下机器人的设计与控制系统
水下机器人的设计与控制系统水下机器人是一种能够在水下环境中执行各种任务的机器人系统,其设计与控制系统对于保证机器人的运行稳定性、任务执行能力以及操作人员的安全至关重要。
在本文中,将会介绍水下机器人设计与控制系统的基本原理、关键技术和挑战,并探讨其应用和发展前景。
水下机器人的设计与控制系统主要包括机械结构设计、传感器系统、控制算法和通信系统等方面。
首先,机械结构设计是水下机器人的基础,需要考虑水下环境的压力、流体力学特性以及机器人的稳定性和灵活性。
通常,水下机器人采用球形或者鱼雷形状的外壳,可以减小水流对其产生的阻力,提高机器人的机动能力。
此外,机械臂的设计也是关键因素,可以完成各种操作任务,如采样、维修和搬运等。
其次,传感器系统是水下机器人的"感知器官",能够获取周围环境信息以及机器人自身状态。
在水下环境中,由于水的压力和水流的干扰,传感器的选型和安装位置需要特别考虑。
常见的传感器包括声纳、摄像头、水质传感器、陀螺仪和加速度计等。
声纳传感器可以用于定位、避障和目标识别,摄像头则可以实现图像采集和目标跟踪等功能。
水质传感器可以监测水体的溶解氧、温度、盐度等参数,用于环境监测和资源调查。
而陀螺仪和加速度计则可以提供机器人的姿态和运动信息,用于控制算法的运算和决策。
控制算法是水下机器人设计与控制系统的核心,直接影响机器人的运动能力和任务执行效果。
在水下环境中,由于水的多样性和复杂性,控制算法需要具备一定的自主适应性和智能化。
常见的控制算法包括PID控制器、模糊控制算法、遗传算法和神经网络等。
PID控制器可以通过调节机器人的姿态和运动来实现控制目标,模糊控制算法则可以应对环境变化和不确定性。
遗传算法和神经网络则可以实现机器人的智能决策和路径规划。
除了以上几个方面,水下机器人的设计与控制系统还需要考虑通信系统的设计。
在水下环境中,由于水的吸收和散射,无线通信的可靠性和传输速率较低。
因此,水下机器人通常采用声波通信或者通过光缆进行通信。
水下机器人的控制系统设计及其应用

水下机器人的控制系统设计及其应用在现代科技的快速发展中,水下机器人成为拥有极大发展潜力的一种高新技术产品。
无论在水下搜索,海底勘探、海洋生态监测等领域都有着广泛的应用。
而其中一个重要的因素是水下机器人的控制系统,它决定了机器人的动作以及在工作时的稳定性和安全。
因此,针对水下机器人控制系统的设计及其应用研究是当务之急。
本文将会从控制系统的设计入手,分析其组成结构及其控制策略,以及目前水下机器人控制系统在海洋勘探、资源发掘和海底环境监测方面的应用。
一、水下机器人控制系统的设计水下机器人控制系统是机器人的大脑,决定了机器人的方向、速度和姿态,并将其与人类的指令进行接口。
有效的水下机器人控制系统可以使机器人在复杂的水下环境中高效运作,并可以避免许多危险。
水下机器人控制系统的设计一般包括能量供应系统、传感器、控制器以及执行器。
1. 能量供应系统对于大多数水下机器人而言,电池将是其能量供应系统的核心。
然而,由于水下环境的特殊性,机器人需要有较长的工作时间,因此水下机器人的控制系统需要通过一些方法来降低机器人的能量消耗。
例如,增加机器人的壳体材质以增强机器人的浮力,避免机器人对于深度的主动操控等。
此外,太阳能电池板可以在水上或水下提供独立的能源,以适应不同的水下任务需求。
2. 传感器作为与环境交互的重要组成部分,传感器可以帮助机器人识别环境以及进行数据采集。
在水下环境中,机器人需要使用各式各样的传感器,如摄像头、声学传感器、压力计、温度传感器等等,以便完成其任务。
例如,在水下搜索中,水下机器人需要具有高精度的声学和光学传感器,以便检测到目标物体。
在海底勘探中,应该采用高精度的磁力计和惯性导航系统来确定目标物体。
3. 控制器控制器是水下机器人控制系统的实质性部分,决定了机器人如何执行任务。
常见的控制器可以分为传统的PID控制器和现代的模糊控制器、神经网络控制器、遗传算法控制器等。
这些控制器通常都有输入信号、反馈信号和输出信号。
水下管道巡检机器人控制系统设计

第21期2022年11月无线互联科技Wireless Internet TechnologyNo.21November,2022基金项目:国家级大学生创新创业训练计划项目资助;项目编号:202110859018㊂作者简介:蒲小虎(1998 ),男,四川南充人,本科生;研究方向:嵌入式系统设计㊂水下管道巡检机器人控制系统设计蒲小虎,杜㊀青,王小东(天津天狮学院信息科学与工程学院,天津㊀301700)摘㊀要:为贯彻国家海洋强国战略,直面产业应用中管道资源输送中遇到的实际问题,文章通过树莓派Python 编程技术,结合视觉检测㊁水深检测㊁数据分析等功能,设计了一款水下管道巡检机器人控制系统,以达到水下管道智能检测的目的㊂该系统不仅可降低水下管道检测对人的危险性,同时可大幅度提升水下管道检测的工作效率㊂该系统由树莓派㊁视觉模块㊁深度传感器㊁电机驱动㊁报警电路㊁VNC 显示界面组成,可实现水下管道巡检㊁附着物报警及水下环境信息检测等功能㊂关键词:水下管道巡检;控制系统;树莓派;机器视觉0㊀引言㊀㊀水下机器人作为一种高技术手段,在海洋开发和利用领域的重要性日渐上升㊂随着产业的发展,各行各业迫切需要大量适用于水下作业的各式各样的水下机器人[1]㊂本设计以水下管道智能检测的现实场景和未来发展为主题,利用智能技术自主设计一台按照给定任务完成水下管道检测的机器人㊂该机器人能够沿着水下管道运动,检测管道上的吸附物,并发出警报㊂任务执行过程中可以不使用包括遥控在内的任何人工交互的手段控制水中机器人及辅助装置㊂1㊀方案设计㊀㊀本系统可分为上位机和下位机两部分,上位机通过VNC 远程登录界面可以进行程序调试㊁修改阈值参数,还可以进行图像和信息数据的实时监测㊂下位机以树莓派为主体连接各个传感器,通过图像识别技术实现系统功能,下位机主要包括树莓派4B㊁视觉模块㊁深度传感器㊁电机驱动模块㊁潜水电机㊁报警模块和电源电路等,系统框如图1所示㊂图1㊀系统框㊀㊀具体实现的功能如下㊂(1)管道循迹:利用树莓派获取内窥镜采集的图像进行数据处理,并将处理过的图像数据通过远程界面窗口显示出图像,对其进行记录;在程序上设置电机前进㊁左转㊁右转和停止的阈值条件,通过设置的颜色阈值来识别管道,满足机器人对不同的颜色管道的识别,可以适应多种场景和不同的环境㊂(2)对水下场景的拍摄:在进行管道巡检中,VNC 界面会实时显示画面,可以使用内窥镜对图像进行拍照,保存在树莓派内部文件里,可用于分析后期水下场景数据㊂(3)附着物识别报警:在进行管道巡检中,可以对管道上的附着物进行形状识别,并发出报警㊂(4)可以采集水下深度信息㊂2㊀系统硬件设计2.1㊀树莓派最小系统㊀㊀本设计主控单元采用树莓派,树莓派是一款基于ARM 的微型电脑主板,其大小仅比信用卡稍大点㊂其以SD /MicroSD 卡为内存硬盘,卡片主板周围有1个10/100以太网接口和4个USB 接口,可连接鼠标㊁键盘㊁网线,拥有HDMI 高清视频输出接口和模拟信号的电视输出接口,以上部件全部整合在1张主板上,具备PC 的所有基本功能㊂拥有40个GPIO 引脚,可以连接多个模块,并且有着强大的可扩张性,可以添加拓展板来增加连接模块的数量㊂设计中只需接通内窥镜和外围设备,就能执行实时视频播放等诸多功能㊂2.2㊀视觉模块电路设计㊀㊀本设计中的电子内窥镜是TYPE-C&Android&PC三合一的,用USB 接口跟树莓派连接便可使用,不用安装驱动[2]㊂电压为5V,分辨率有1080ˑ720和640ˑ480两种,频率在30fps,支持多个系统,在本次设计中用来采集图像和拍照(JPEG格式)㊂2.3㊀L298N电机驱动电路设计㊀㊀L298N是一种具有大电流㊁高电压的电机驱动芯片㊂该芯片采用15脚封装㊂主要特点是:输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率可达25W;工作电压高,最高工作电压可达46V㊂L298N内部含有两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机㊁继电器线圈等感性负载;L298N是使用逻辑电平信号控制;可以外接检测电阻,将变化量反馈给控制电路㊂使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机㊂本次根据设计要求,需要控制两台直流电机㊂2.4㊀报警电路设计㊀㊀使用蜂鸣器加LED灯组合成一个声光报警电路,所用蜂鸣器是一体化结构的电子讯响器,采用直流电压供电㊂这里使用的是高电平,给予它一个高(HIGH)信号就会发出警报,此时再给它一个低(LOW)信号报警就会停止,在设计中用来报警㊂在报警的时候,LED 灯也会一并闪烁,进行报警提醒㊂2.5㊀深度传感器电路设计㊀㊀水深传感器采用TE公司的MS5837压力传感器, MS5837压力传感器是高精度水深测量的理想选择,水深测量分辨率高达2mm㊂MS5837是新一代的高分辨率I2C接口压力传感器㊂MS5837压力传感器模块包括高线性度的压力传感元件和超低功耗的24位әADC内置工厂校准系数㊂MS5837-30BA压力传感器可以提供高精度的24位压力和温度数字输出,使用者可以根据实际应用需要配置功耗和转换的速度㊂该型号传感器的通信协议简单,不需要修改内部的寄存器,可以与所有形式的微控器配合使用㊂2.6㊀LM2596S降压模块的电路设计㊀㊀LM2596S降压模块是由德州仪器(TI)研发生产的一款降压模块,可以产生3A电流输出降压,本质上是一种非同步降压型电源管理单片集成电路的开关电压调节器㊂模块内含150kHz固定频率振荡器和1.23V 基准稳压器㊂LM2596S具有功能完善的电流限制㊁热关断电路㊁保护电路等㊂该降压模块只需要非常少的外围器件就可以构成高效稳定的稳压电路[3]㊂还可以提供3.3V,5V,12V等多种电压选择,本次设计选择5V电压作为需求㊂2.7㊀水下电机㊀㊀水下推进器是一款全防水的水下推进器,电机的转子做了全面防水措施,可以完全浸泡在水下工作,如果需要在海水环境下工作,须在工作完毕后用淡水冲洗电机㊂如果不冲洗电机,电机内部的海水干燥后会形成结晶,影响推进器的寿命㊂3 软件设计㊀㊀本设计是在树莓派内部进行程序编写,首先用SD 卡配置镜像,获取树莓派的IP地址并使用VNC登录,配置好之后在其内部进行程序的编写和调试㊂在本次设计中使用的是Python语言,在进行编程时要清楚树莓派GPIO口的定义如何使用和格式㊂3.1㊀主程序设计㊀㊀主程序的运行过程:打开电源开关,系统正常供电,开始初始化,使用内窥镜获取图像,树莓派对获取的图像进行处理,开始检测白色的水下管道,根据管道的点位不同给电机使能信号,让电机开始运作,根据图像上白色区域的阈值进行前进㊁左转㊁右转㊂在循迹过程中,内窥镜会识别管道上是否有异物,并对其进行形状识别㊂如果是圆形,LED灯(红)闪烁,蜂鸣器报警;如果是方形,LED灯(绿)闪烁,蜂鸣器报警㊂主程序流程如图2所示㊂图2㊀主程序流程3.2㊀管道识别算法设计㊀㊀管道识别需要对内窥镜的实时图像进行灰度处理,显示出灰度图像,然后进行二值化处理㊂本设计的测试使用白色管道来进行检测,在程序中单独调用一个二值化图像的窗口用来识别管道,设定一个阈值,高于这个阈值为白色,低于阈值为黑色,进行划线得到白色管道路径㊂3.3㊀方向控制算法设计㊀㊀要控制机器人的前进,左转和右转,需要对当前二值化图像进行处理,求出白色管道的平均点位,再和船在管道正上方的位置时的白色管道的点位(320)进行比较,因为每帧图像的大小是640ˑ320,当船体(管道检测机器人)在巡检管道正上方时,所拍摄的图像中,白色管道在图像的中心位置,测试管道点位为320左右㊂当所获得的图像点位偏离320时,即可判断船体的形式方向㊂3.4㊀形状识别算法设计㊀㊀形状识别流程是首先对于获取的图像进行腐蚀和膨胀处理,通过卷积核设置阈值来消除噪点,然后将膨胀和腐蚀过后的图像分别显示出来㊂有了腐蚀和膨胀图像结果后,就可以在原图上绘制轮廓线,通过绘制轮廓线可以获取形状面积,这个时候对于轮廓线的数量进行一个判定,轮廓线大于13条说明没有检测到附着物,反之则有㊂轮廓线小于13条在连续5次以上附着物为圆形,反之附着物为方形㊂4㊀结语㊀㊀综上所述,本文所设计的系统能够识别水下白色管道并且能够根据情况直行㊁左转和右转,能够发现附着物并判断其形状,能在浅水区进行有效识别㊂水下机器人的应用在很大程度上可以降低人工巡检的难度,提高工作效率㊂随着社会的进步,水下巡检机器人在未来会有非常广泛的应用㊂[参考文献][1]孙玉山,冉祥瑞,张国成,等.智能水下机器人路径规划研究现状与展望[J].哈尔滨工程大学学报,2020(8):1111-1116.[2]李雪,杨大勇,刘家毅,等.水下石油管道巡查机器人控制系统的设计[J].测控技术,2019(8):15-20.[3]李泽科,陈越超.水中管道智能巡检机器人设计[J].电子产品世界,2022(1):86-88.(编辑㊀王永超) Design of underwater pipeline inspection robot control systemPu Xiaohu,Du Qing,Wang Xiaodong(School of Information Science and Engineering,Tianjin Tianshi College,Tianjin301700,China) Abstract:To implement the national marine power strategy,face the practical problems encountered in pipeline resource transportation industry application,this paper through the raspberry pie python programming technology, combined with visual detection,water depth detection,data analysis,designed a underwater pipeline inspection robot control system,in order to realize the purpose of underwater pipeline intelligent detection.The system can not only reduce the risk of underwater pipeline detection to people,and can greatly improve the efficiency of underwater pipeline detection.The system is composed of raspberry pie,visual module,depth sensor,motor drive,alarm circuit and VNC display interface,which can realize underwater pipeline inspection,attachment alarm and underwater environmental information detection.Key words:underwater pipeline inspection;control system;raspberry pie;machine vision。
水下清洗机器人控制系统软件设计
水下清洗机器人控制系统软件设计水下清洗机器人控制系统软件设计近年来,随着水下作业需求的增加,水下机器人的应用越来越广泛。
在水下清洗领域,水下清洗机器人的出现为清洁深水区域提供了全新解决方案。
水下清洗机器人能够在各种恶劣环境下完成清洗任务,提高工作效率,并且减少人工风险。
而水下清洗机器人的控制系统软件设计则起到了至关重要的作用,本文将着重介绍水下清洗机器人控制系统软件的设计与实现。
水下清洗机器人的控制系统软件设计是一个复杂而关键的技术挑战。
在设计过程中,首先需要充分理解机器人的工作原理和工作环境。
根据机器人的结构和功能,确定控制系统的主要功能和基本架构,然后设计相应的控制算法和控制策略。
为了实现机器人的准确控制,通常需要运用计算机视觉、图像处理、运动控制、传感器信息融合等多种技术手段。
在控制系统软件设计的过程中,需要考虑到以下几个方面。
首先是运动控制。
水下清洗机器人通常由多个关节驱动器和执行器组成。
为了实现机器人的精确运动,需要设计适应机器人结构和任务需求的运动控制算法。
这些算法需要考虑相机图像的处理速度、关节角度的准确度以及控制命令的响应速度等因素。
其次是传感器信息处理。
水下清洗机器人通常配备多种传感器,如摄像头、压力传感器等。
这些传感器能够提供机器人周围环境的信息,从而辅助机器人的运动和决策。
在软件设计中,需要通过合适的算法将传感器信息进行处理和分析,以获取有效的环境信息,并根据需要进行决策。
另外还需要考虑到机器人的自主性。
水下清洗机器人作为一种智能化设备,具有一定的自主决策和执行能力。
在软件设计中,需要考虑到机器人的感知、识别、学习和决策等方面的能力,以实现机器人的自主工作。
除此之外,还需要考虑到控制系统软件的稳定性和扩展性。
稳定性是指控制系统软件在各种工作条件下的表现稳定可靠。
软件设计中需要考虑到各种异常情况的处理和容错机制。
扩展性是指控制系统软件在需要时能够进行升级和扩展。
软件设计中需要考虑到机器人未来可能的新功能和应用需求。
基于PC104的水下航行器导航系统设计

基于PC104的水下航行器导航系统设计
曹永辉;高勇;石秀华;许晖
【期刊名称】《计算机测量与控制》
【年(卷),期】2006(014)003
【摘要】导航系统是水下航行器的重要组成部分,为了实现水下航行器的精确导航,采用了以PC104工控计算机为核心、GPS定位和惯性导航相结合的导航系统的改进方案,给出了导航系统的工作原理及基本硬件组成,介绍了惯性测量单元、GPS、电子罗盘等传感器与主控计算机进行通讯的各个软件模块的功能,并使用了异步卡尔曼滤波器进行数据融合与航位推算;该系统在提高导航精度的同时还具有通用性,可适用于不同类型的水下航行器.
【总页数】3页(P368-370)
【作者】曹永辉;高勇;石秀华;许晖
【作者单位】西北工业大学,航海学院,陕西,西安,710072;中国船舶重工集团公司第705所,陕西,西安,710075;西北工业大学,航海学院,陕西,西安,710072;西北工业大学,航海学院,陕西,西安,710072
【正文语种】中文
【中图分类】U666.11
【相关文献】
1.基于PC104的超高速水下航行器测控程序设计与实现 [J], 王亚东;袁绪龙;张宇文
2.基于PC104和DSP的某型无人机导航/飞控系统设计 [J], 贲宗玉;袁冬莉;高建尧
3.基于PC104的嵌入式组合导航系统设计 [J], 王其;蒋平;李严;卢晓东;顾培培;
4.基于PC104的嵌入式组合导航系统设计 [J], 王其;蒋平;李严;卢晓东;顾培培
5.基于PC104的嵌入式船舶组合导航系统设计研究 [J], 王军生
因版权原因,仅展示原文概要,查看原文内容请购买。
PC104嵌入式计算机在海底大地电磁信号采集中的应用

PC104嵌入式计算机在海底大地电磁信号采集中的应用邓明;白宜诚;陈儒军;李哲;肖建平;邓靖武
【期刊名称】《中南大学学报(自然科学版)》
【年(卷),期】2002(033)006
【摘要】为了观测海底大地电磁数据,设计了海底大地电磁探测仪器的智能化方案,即以性能优良的PC104嵌入式计算机作主控单元,编制采集驱动程序,采用合理的硬件接口电路,在非实时监控的运行环境下采集整个海底大地电磁信号.用该仪器系统能记录水深在100 m以下的极其微弱的海底大地电磁信号测量数据表明,此信号是海底在地球物理场的真实反映.
【总页数】4页(P555-558)
【作者】邓明;白宜诚;陈儒军;李哲;肖建平;邓靖武
【作者单位】中国地质大学,地球物理与信息技术学院,北京,100083;中南大学,信息物理工程学院,湖南,长沙,410083;中南大学,信息物理工程学院,湖南,长沙,410083;中国石油天然气集团公司物,探局仪器总厂,河北,保定,072550;中南大学,信息物理工程学院,湖南,长沙,410083;中国地质大学,地球物理与信息技术学院,北京,100083【正文语种】中文
【中图分类】P318.6
【相关文献】
1.基于ARM的海底大地电磁信号采集系统主控模块改进 [J], 王启宁;杜刚;姜景捷
2.嵌入式计算机模块PC104在工程中的应用 [J], 王少力;吕超
3.海底大地电磁信号采集的技术难点 [J], 邓明;魏文博;谭捍东;金胜;邓靖武
4.ARM嵌入式系统在海底大地电磁信号采集中的应用研究初探 [J], 杜刚;魏文博;姜景捷;杜松
5.海底大地电磁信号采集电路的驱动程序 [J], 张启升;邓明;罗锋;乔德新;陈凯因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PC104与C8051F120的水下机器人环境监测系
统设计方案
为了实现对水下机器人周围环境的监测,提出了一种基于PC104与
C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。
该系统的硬件部分主要是采集下潜深度传感器、姿态传感器、温湿度传感器的数据,软件部分采用用Visual C++6.0设计了监控界面。
该系统能够实时显示视频和各传感器数据。
实际测试表明,该系统具有稳定性高、准确性高的特点,达到了设计要求。
水下机器人具有重大需求和巨大的市场价值,如:用于泵站流道和叶轮叶片、坝体、桥墩、排沙口、拦污栅、病险水库等的水下检查和评估。
用于市政饮用水系统中水管、水库检查;用于城市排污/排涝管道、下水道检查;用于科学研究、教学目的的水环境、水下生物的观测、研究和教学;用于海洋考察、冰下观察;还有,随着当前全球化的安全局势的恶化,水下机器人可以广泛应用于安全部门,如:检查大坝、桥墩上是否安装爆炸物,船侧、船底是否有炸弹等。
这些功能得实现都是基于水下机器人对于周围环境的监测,所以采用一种高效、实时、简单的系统来完成环境监测的功能是十分必要的。
在做了多种系统的比较后,提出并设计了基于PC104与C8051F120的水下机器人环境监测系统设计方案,该系统能够完成对环境的监测功能。