超声波避障程序
超声波避障小车程序设计
////5路超声波避障实验:51单片机 + HC-SR04超声波 ////include <AT89x52.H> //器件配置文件include <intrins.h> define RX1 P3_6//小车左侧超声波HC-SR04接收端define TX1 P1_7 //发送端define RX2 P3_3 //左前方超声波define TX2 P0_2define RX3 P2_4 //正前方超声波define TX3 P2_5define RX4 P3_5 //右前方超声波define TX4 P3_4define RX5 P3_7 //右侧超声波define TX5 P1_6define Left_moto_pwm P1_5 //PWM信号端define Right_moto_pwm P1_4 //PWM信号端//定义小车驱动模块输入IO口sbit IN1=P1^0;sbit IN2=P1^1;sbit IN3=P1^2;sbit IN4=P1^3;sbit EN1=P1^4;sbit EN2=P1^5;bit Right_moto_stop=1;bit Left_moto_stop =1;define Left_moto_go {IN1=0,IN2=1,EN1=1;} //左电机向前走define Left_moto_back {IN1=1,IN2=0,EN1=1;} //左边电机向后走define Left_moto_Stop {EN1=0;} //左边电机停转define Right_moto_go {IN3=1,IN4=0,EN2=1;} //右边电机向前走define Right_moto_back {IN3=0,IN4=1,EN2=1;} //右边电机向后走define Right_moto_Stop {EN2=0;} //右边电机停转unsigned char pwm_val_left =0;//变量定义unsigned char push_val_left =0;// 左电机占空比N/20unsigned char pwm_val_right =0;unsigned char push_val_right=0;// 右电机占空比N/20unsigned int time=0;unsigned int timer=0;unsigned long S1=0;unsigned long S2=0;unsigned long S3=0;unsigned long S4=0;unsigned long S5=0;void delay_1msunsigned char x //1ms延时函数,100ms以内可用 { unsigned char i; whilex-- fori=124;i>0;i--; } //void Count1 //计算左侧超声波距离的函数{ whileRX1; //当RX1为零时等待TR0=1; //开启计数whileRX1; //当RX1为1计数并等待TR0=0; //关闭计数time=TH0256+TL0;TH0=0;TL0=0;S1=time1.7/100; //算出来是CM }void Count2 //计算函数{ whileRX2; //当RX2为零时等待TR0=1; //开启计数whileRX2; //当RX2为1计数并等待TR0=0; //关闭计数time=TH0256+TL0;TH0=0;TL0=0;S2=time1.7/100; //算出来是CM }void Count3 //计算函数{ whileRX3; //当RX3为零时等待TR0=1; //开启计数whileRX3; //当RX3为1计数并等待TR0=0; //关闭计数time=TH0256+TL0;TH0=0;TL0=0;S3=time1.7/100; //算出来是CM }void Count4 //计算函数{ whileRX4; //当RX4为零时等待TR0=1; //开启计数whileRX4; //当RX4为1计数并等待TR0=0; //关闭计数time=TH0256+TL0;TH0=0;TL0=0;S4=time1.7/100; //算出来是CM }void Count5 //计算函数{whileRX5; //当RX5为零时等待TR0=1; //开启计数whileRX5; //当RX5为1计数并等待TR0=0; //关闭计数time=TH0256+TL0;TH0=0;TL0=0;S5=time1.7/100; //算出来是CMvoid leftrunvoid {push_val_left=20;push_val_right=20;Left_moto_back //左电机往后走 Right_moto_go //右电机往前走 }// //右转void rightrunvoid{push_val_left=20;push_val_right=20;Left_moto_go //左电机往前走 Right_moto_back //右电机往后走 }// //停止void stoprunvoid{Left_moto_Stop //左电机停 Right_moto_Stop //右电机停 }// / PWM调制电机转速 / /// 左电机调速 / /调节push_val_left的值改变电机转速,占空比 /void pwm_out_left_motovoid{ifLeft_moto_stop{ ifpwm_val_left<=push_val_left{ Left_moto_pwm=1; }else { Left_moto_pwm=0; }ifpwm_val_left>=20pwm_val_left=0;}else { Left_moto_pwm=0; } }// / 右电机调速 /void pwm_out_right_motovoid{ ifRight_moto_stop{ ifpwm_val_right<=push_val_right{ Right_moto_pwm=1;}else { Right_moto_pwm=0; }ifpwm_val_right>=20 pwm_val_right=0; }else { Right_moto_pwm=0; } }//void timer0 interrupt 1 //T0中断 { }// ///TIMER1中断服务子函数产生PWM信号/void timer1interrupt 3{ TH1=65536-1000/256; //1ms定时 TL1=65536-1000%256;timer++;pwm_val_left++;pwm_val_right++;pwm_out_left_moto;pwm_out_right_moto; }/ /void mainvoid{TMOD=0x11; //设T0为方式1,GATE=1;TH0=0;TL0=0;TH1=65536-1000/256; //1ms定时TL1=65536-1000%256;ET0=1; //允许T0中断ET1=1; //允许T1中断TR1=1; //开启定时器EA=1; //开启总中断while1 {TX1=1; //开启超声波1探测delay_1ms1;TX1=0;Count1; //测距TX2=1;delay_1ms1;TX2=0;Count2;TX3=1;delay_1ms1;TX3=0;Count3;TX4=1;delay_1ms1;TX4=0;Count4;TX5=1;delay_1ms1;TX5=0;Count5;ifS3<20 && S1<20 && S5<20 //进入狭窄通道{ backrun; //倒车delay_1ms100;}else ifS3<20 && S1<S5 //车子与障碍物90度垂直,左边距离小右转{ rightrun; }else ifS3<20 && S5<S1 //车子与障碍物90度垂直,右边距离小左转 { leftrun; } else ifS2<20{ rightrun; //车与障碍物呈45度角时,车的左边比车的右边距离小,右转 } else ifS4<20{ leftrun; //车与障碍物呈45度角时,车的右边比车的左边距离小,左转 }else { run; } } }。
stm32小车避障原理
stm32小车避障原理
STM32小车避障原理是基于超声波传感器实现的。
具体原理如下:
1. 首先,STM32芯片连接一组超声波传感器。
超声波传感器可以发射超声波,并接收超声波的回波。
根据回波的时间差,可以计算出障碍物与小车的距离。
2. STM32芯片通过定时器模块来控制超声波的发射和接收。
通过控制发射超声波的脉冲时间和接收回波的时间,可以计算出距离。
3. STM32芯片获取超声波传感器的距离值后,通过算法判断是否有障碍物。
当检测到距离小于一定阈值时,即表示有障碍物。
4. 当检测到障碍物时,STM32芯片通过电机驱动模块控制车轮停止运动或者改变方向,从而避免与障碍物碰撞。
5. STM32芯片通过程序控制定时器、电机驱动等模块,实现小车的自动避障功能。
综上所述,STM32小车避障原理是通过超声波传感器检测障碍物距离,然后控制车轮停止运动或者改变方向来避免碰撞。
10.智能小车-超声波避障实验
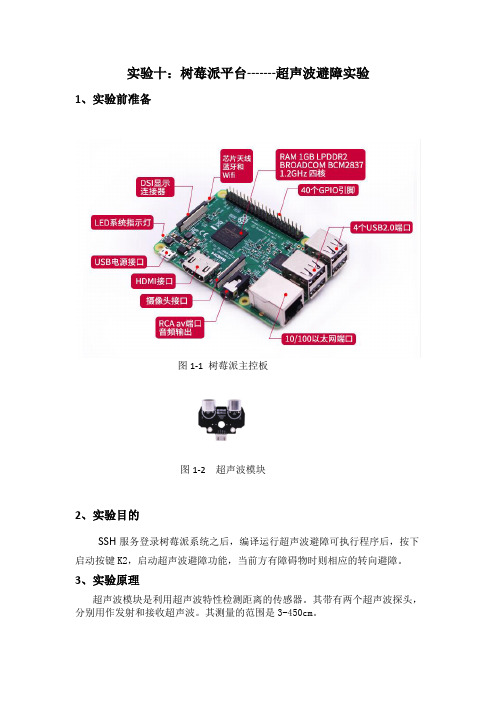
实验十:树莓派平台-------超声波避障实验1、实验前准备图1-1 树莓派主控板图1-2 超声波模块2、实验目的SSH服务登录树莓派系统之后,编译运行超声波避障可执行程序后,按下启动按键K2,启动超声波避障功能,当前方有障碍物时则相应的转向避障。
3、实验原理超声波模块是利用超声波特性检测距离的传感器。
其带有两个超声波探头,分别用作发射和接收超声波。
其测量的范围是3-450cm。
图3-1 超声波发射和接收示意图图3-2 超声波模块引脚该模块的工作原理:先使用树莓派的wiringPi编码引脚31向TRIG脚输入至少10us的高电平信号,触发超声波模块的测距功能。
如下图3-3所示:图3-3 超声波模块发送触发信号测距功能触发后,模块将自动发出 8 个 40kHz 的超声波脉冲,并自动检测是否有信号返回,这一步由模块内部自动完成。
一旦检测到有回波信号则ECHO引脚会输出高电平。
高电平持续的时间就是超声波从发射到返回的时间。
此时可以使用时间函数计算出echo引脚高电平的持续时间,即可计算出距被测物体的实际距离。
公式: 距离=高电平时间*声速(340M/S)/2。
4、实验步骤4-1.看懂原理图图4-1 树莓派主控板电路图4-2 超声波接线头图4-3树莓派40pin引脚对照表4-2 由电路原理图可知超声波的Trig引脚接在接在主控板上的wiringPi编码上的31口(SCL_C)上,而Echo接在主控板上的30口(SDA_C)上。
4-3 程序代码如下:输入:gcc avoid_ultrasonic.c -o avoid_ultrasonic -lwiringPi -lpthread ./avoid_ultrasonic接着另开一个终端./initpin.sh初始化引脚。
超声避障小车实习报告
一、实习背景随着科技的飞速发展,智能化、自动化技术在各个领域得到了广泛应用。
在机器人领域,避障小车作为基础的研究与开发对象,具有很高的实用价值和研究意义。
本次实习,我们小组选择设计并制作一款基于超声波避障技术的小车,旨在通过实际操作,深入了解超声波避障的原理和实现方法,提升我们的动手能力和团队协作能力。
二、实习目标1. 理解超声波避障的基本原理。
2. 掌握超声波传感器的应用方法。
3. 设计并实现一个基于超声波避障的小车控制系统。
4. 通过实验验证小车的避障性能。
三、实习内容1. 超声波避障原理超声波避障技术利用超声波传感器发射和接收超声波,根据回波的时间差计算障碍物的距离,从而实现避障功能。
具体来说,当超声波传感器发射超声波时,遇到障碍物会反射回来,传感器接收到反射波后,通过计算发射和接收之间的时间差,结合超声波的传播速度,即可得到障碍物的距离。
2. 硬件设计本次实习所使用的硬件主要包括以下部分:单片机:作为系统的核心控制单元,负责接收传感器信号、处理数据并发出控制指令。
超声波传感器:用于检测前方障碍物,并将距离信息传输给单片机。
电机驱动模块:根据单片机的控制指令,驱动小车前进、后退、左转或右转。
电源系统:为整个系统提供稳定可靠的电力支持。
3. 软件设计软件设计主要包括以下部分:超声波测距程序:通过单片机控制超声波传感器发射超声波,并计算回波时间差,从而得到障碍物的距离。
避障控制程序:根据超声波测距程序得到的数据,判断小车是否遇到障碍物,并控制小车进行相应的避障操作。
4. 实验验证通过实际实验,我们对小车的避障性能进行了验证。
实验结果表明,小车能够准确检测到前方障碍物,并在遇到障碍物时及时进行避障,表现出良好的避障性能。
四、实习总结通过本次实习,我们小组成功设计并制作了一款基于超声波避障技术的小车,实现了以下目标:1. 理解了超声波避障的基本原理。
2. 掌握了超声波传感器的应用方法。
3. 设计并实现了小车控制系统。
超声波避障原理
超声波避障原理
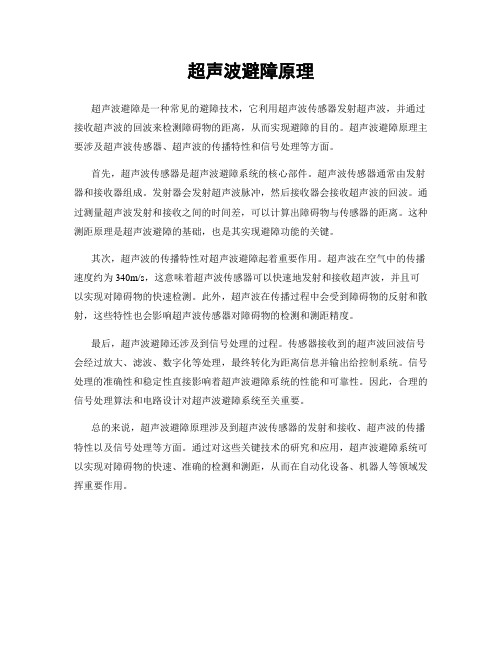
超声波避障是一种常见的避障技术,它利用超声波传感器发射超声波,并通过接收超声波的回波来检测障碍物的距离,从而实现避障的目的。
超声波避障原理主要涉及超声波传感器、超声波的传播特性和信号处理等方面。
首先,超声波传感器是超声波避障系统的核心部件。
超声波传感器通常由发射器和接收器组成。
发射器会发射超声波脉冲,然后接收器会接收超声波的回波。
通过测量超声波发射和接收之间的时间差,可以计算出障碍物与传感器的距离。
这种测距原理是超声波避障的基础,也是其实现避障功能的关键。
其次,超声波的传播特性对超声波避障起着重要作用。
超声波在空气中的传播速度约为340m/s,这意味着超声波传感器可以快速地发射和接收超声波,并且可以实现对障碍物的快速检测。
此外,超声波在传播过程中会受到障碍物的反射和散射,这些特性也会影响超声波传感器对障碍物的检测和测距精度。
最后,超声波避障还涉及到信号处理的过程。
传感器接收到的超声波回波信号会经过放大、滤波、数字化等处理,最终转化为距离信息并输出给控制系统。
信号处理的准确性和稳定性直接影响着超声波避障系统的性能和可靠性。
因此,合理的信号处理算法和电路设计对超声波避障系统至关重要。
总的来说,超声波避障原理涉及到超声波传感器的发射和接收、超声波的传播特性以及信号处理等方面。
通过对这些关键技术的研究和应用,超声波避障系统可以实现对障碍物的快速、准确的检测和测距,从而在自动化设备、机器人等领域发挥重要作用。
超声波避障
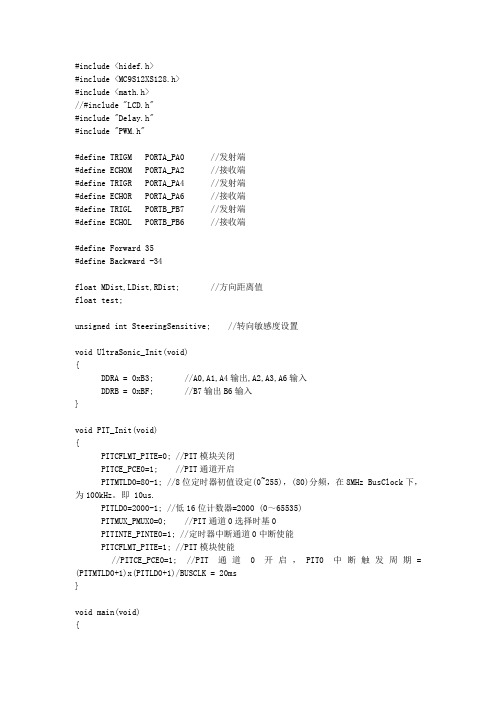
#include <hidef.h>#include <MC9S12XS128.h>#include <math.h>//#include "LCD.h"#include "Delay.h"#include "PWM.h"#define TRIGM PORTA_PA0 //发射端#define ECHOM PORTA_PA2 //接收端#define TRIGR PORTA_PA4 //发射端#define ECHOR PORTA_PA6 //接收端#define TRIGL PORTB_PB7 //发射端#define ECHOL PORTB_PB6 //接收端#define Forward 35#define Backward -34float MDist,LDist,RDist; //方向距离值float test;unsigned int SteeringSensitive; //转向敏感度设置void UltraSonic_Init(void){DDRA = 0xB3; //A0,A1,A4输出,A2,A3,A6输入DDRB = 0xBF; //B7输出B6输入}void PIT_Init(void){PITCFLMT_PITE=0; //PIT模块关闭PITCE_PCE0=1; //PIT通道开启PITMTLD0=80-1; //8位定时器初值设定(0~255),(80)分频,在8MHz BusClock下,为100kHz。
即 10us.PITLD0=2000-1; //低16位计数器=2000 (0~65535)PITMUX_PMUX0=0; //PIT通道0选择时基0PITINTE_PINTE0=1; //定时器中断通道0中断使能PITCFLMT_PITE=1; //PIT模块使能//PITCE_PCE0=1; //PIT通道0开启,PIT0中断触发周期= (PITMTLD0+1)x(PITLD0+1)/BUSCLK = 20ms}void main(void){unsigned char CarStatus=0; //0为前进,1为倒车unsigned int i;signed int itmp;signed int speed=Forward;float ftmp,Sina;DDRM=0xFF; //LED全亮代表处于启动状态。
超声波避障小车设计

超声波避障小车设计引言:随着科技的不断发展,人们对机器人的需求越来越大。
超声波避障小车是一种能够利用超声波测距技术进行环境感知和避障的智能机器人。
本文将介绍超声波避障小车的设计方案及其原理、实现和应用。
一、设计方案:1.1硬件设计:1.1.1小车平台设计:小车平台应具备良好的稳定性和可扩展性,可以根据需要添加其他传感器或执行器。
常见的平台材料有金属和塑料,可以根据实际需求选择适合的材料。
1.1.2驱动电机选择:驱动电机应具备足够的功率和转速,以保证小车的运动能力。
一般可以选择直流无刷电机或步进电机。
1.1.3超声波传感器安装:超声波传感器通过发射和接收超声波信号,实现对周围环境的测距。
传感器应安装在小车前方,可以通过支架或支架固定在小车上。
1.2软件设计:1.2.1运动控制程序:运动控制程序通过控制驱动电机的转速和方向,实现小车的前进、后退、转弯等运动。
可以使用单片机或开发板来编写控制程序。
1.2.2避障算法:避障算法是超声波避障小车的核心功能。
当超声波传感器检测到前方有障碍物时,小车应能及时做出反应,避免与障碍物碰撞。
常见的避障算法包括简单的停止或转向,以及更复杂的路径规划算法。
二、工作原理:超声波避障小车的工作原理是通过超声波测距模块对周围环境进行测量和感知。
超声波传感器发射超声波信号,当信号遇到障碍物后会反射回传感器,通过测量反射时间可以计算出距离。
根据测得的距离,小车可以判断是否有障碍物,并采取相应的措施进行避障。
三、实现步骤:3.1搭建小车平台:根据设计方案搭建小车平台,安装驱动电机和超声波传感器。
3.2连接电路:将驱动电机和超声波传感器与单片机或开发板连接,建立电路连接。
3.3编写控制程序:利用编程语言编写运动控制程序,实现小车的基本运动功能。
3.4设计避障算法:根据需求设计避障算法,实现小车的避障功能。
3.5调试和测试:对小车进行调试和测试,确保其正常工作。
四、应用领域:超声波避障小车在工业自动化、家庭服务、教育培训等领域具有广泛的应用前景。
超声波避障技术设计
南 京 理 工 大 学毕业设计说明书(论文)作 者:薛玉洁 准考证号: 014911251036 教学点:南京工业职业技术学院 专 业:电子工程 题 目:超声波在小车避障技术的应用设计指导者:(姓 名) (专业技术职务)评阅者:(姓 名) (专业技术职务)2013 年 5 月倪瑛 副教授 副教授 戴娟毕业设计说明书(论文)中文摘要毕业设计说明书(论文)外文摘要目次1 引言 (1)1.1 研究背景与意义 (5)2 超声波的避障技术 (8)2.1 小车的避障技术 (8)2.2 超声波的传播特性 (9)2.3 超声波测距技术 (9)2.4 基于单片机的超声波测距系统 (10)2.5 超声波的衰减 (10)3 超声波避障系统硬件设计 (11)3.1 方案概述 (12)3.2 方案设计 (12)3.3 元器件介绍 (13)3.4 超声波发射系统电路 (20)3.5 超声波接收系统电路 (20)3.6 相关软件、电路模块和器件清单。
(21)4 超声波避障系统的软件设计 (22)4.1 直流电机控制软件设计 (23)4.2 超声波测距模块软件设计 (23)4.3 超声波避障技术软件设计 (24)4.4 软件与硬件的整合软件与硬件的整合 (26)5 超声波避障系统调试 (26)5.1 调试过程 (27)5.2 问题分析 (30)5.3 误差分析 (30)致谢 (33)参考文献 (34)1 引言1.1 研究背景与意义随着机器人技术的发展,自主移动机器人以其活性和智能性等特点,在人们的生产、生活中的应用来越广泛。
自主移动机器人通过各种传感器系统感知外界环境和自身状态, 在复杂的已知或者未知环境中自主移动并完成相应的任务。
而在多种探测手段中, 超声波传感器系统由于具有成本低, 安装方便, 不易受电磁、光线、被测对象颜色、烟雾等影响,时间信息直观等特点, 对于被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力, 因此在移动机器人领域有着广泛用。
超声波避障小车程序设计
超声波避障小车程序设计/**************************************** ***************************************** **************************///5路超声波避障实验:51单片机+ HC-SR04超声波///**************************************** ***************************************** **************************/#include <AT89x52.H> //器件配置文件#include <intrins.h> #defineRX1 P3_6//小车左侧超声波HC-SR04接收端#define TX1 P1_7 //发送端#define RX2 P3_3//左前方超声波#define TX2 P0_2#define RX3 P2_4 //正前方超声波#define TX3 P2_5#define RX4 P3_5 //右前void Count2() //计算函数{ while(!RX2); //当RX2为零时等待TR0=1; //开启计数while(RX2); //当RX2为1计数并等待TR0=0; //关闭计数time=TH0*256+TL0;TH0=0;TL0=0;S2=(time*1.7)/100; //算出来是CM }void Count3() //计算函数{ while(!RX3); //当RX3为零时等待TR0=1; //开启计数while(RX3); //当RX3为1计数并等待TR0=0; //关闭计数time=TH0*256+TL0;TH0=0;TL0=0;S3=(time*1.7)/100; //算出来是CM }void Count4() //计算函数{ while(!RX4); //当RX4为零时等待TR0=1; //开启计数while(RX4); //当RX4为1计数并等待TR0=0; //关闭计数time=TH0*256+TL0;TH0=0;TL0=0;S4=(time*1.7)/100; //算出来是CM }void Count5() //计算函数{while(!RX5); //当RX5为零时等待TR0=1; //开启计数while(RX5); //当RX5为1计数并等待TR0=0; //关闭计数time=TH0*256+TL0;TH0=0;TL0=0;S5=(time*1.7)/100; //算出来是CMvoid leftrun(void) {push_val_left=20;push_val_right=20;Left_moto_back //左电机往后走Right_moto_go //右电机往前走}/************************************** **********************************/ //右转void rightrun(void){push_val_left=20;push_val_right=20;Left_moto_go //左电机往前走Right_moto_back //右电机往后走}/************************************** **********************************/ //停止void stoprun(void){Left_moto_Stop //左电机停Right_moto_Stop //右电机停}/************************************** **********************************/ /*PWM 调制电机转速*/ /**** ***************************************** ***************************//*左电机调速*/ /*调节push_val_left的值改变电机转速,占空比*/void pwm_out_left_moto(void){if(Left_moto_stop){ if(pwm_va l_left<=push_val_left){ Left_mo to_pwm=1; }else {Left_moto_pwm=0;}if(pwm_val_left>=20)pwm_val_left=0;}else {Left_moto_pwm =0; } } /******************************************************************/ /*右电机调速*/void pwm_out_right_moto(void) { if(Right_moto_stop){ if(pwm_val_right<=pu sh_val_right){ Right_moto_pwm =1;}else {Right_moto_pwm=0; } if(pwm_val_right>=20)pwm_val_right=0; }else{ Right_moto_p wm=0; } }/************************************** ******************/void timer0() interrupt 1 / /T0中断{ }/************************************** *************/ ///*TIMER1中断服务子函数产生PWM信号*/void timer1()interrupt 3{ TH1=(65536-1000)/256; //1ms定时TL1=(65536-1000)%256;timer++;pwm_val_left++;pwm_val_right++;pwm_out_left_moto();pwm_out_right_moto(); }/************************************** ******************* ****************** ****************************************/void main(void){TMOD=0x11; //设T0为方式1,GATE=1;TH0=0;TL0=0;TH1=(65536-1000)/256; //1ms定时TL1=(65536-1000)%256;ET0=1; //允许T0中断ET1=1; //允许T1中断TR1=1; //开启定时器EA=1; //开启总中断while(1) {TX1=1; //开启超声波1探测delay_1ms(1);TX1=0;Count1(); //测距TX2=1;delay_1ms(1);TX2=0;Count2();TX3=1;delay_1ms(1);TX3=0;Count3();TX4=1;delay_1ms(1);TX4=0;Count4();TX5=1;delay_1ms(1);TX5=0;Count5();if(S3<20 && S1<20 && S5<20) //进入狭窄通道{ backrun(); //倒车delay_1ms(100);}else if(S3<20 && S1<S5 ) //车子与障碍物90度垂直,左边距离小右转{ rightrun(); }else if(S3<20 && S5<S1 ) //车子与障碍物90度垂直,右边距离小左转{ leftrun(); }else if(S2<20){ rightrun(); //车与障碍物呈45度角时,车的左边比车的右边距离小,右转}else if(S4<20){ leftrun(); //车与障碍物呈45度角时,车的右边比车的左边距离小,左转}else { run();} } }。
超声波避障系统设计

• 引言 • 系统硬件设计 • 系统软件设计 • 系统测试与验证 • 系统优化与改进 • 结论与展望
01
引言
目的和背景
目的
设计一种能够实时检测障碍物并实现自动避障的超声波避障 系统,以提高机器人或无人驾驶车辆的安全性和自主性。
背景
随着机器人和无人驾驶技术的快速发展,避障系统成为了实 现自主导航的关键技术之一。超声波传感器因其价格低廉、 性能稳定、易于安装等优点而被广泛应用于避障系统中。
用户体验
用户友好型的设计使得该系统易于使用,无需复杂的设置 或培训。此外,系统还具备较高的性价比,适合大规模生 产和应用。
性能评估
经过实际测试,该系统在各种环境条件下均表现出良好的 稳定性和可靠性,且响应速度快,能够满足实时避障的需 求。
改进空间
尽管本设计在许多方面都取得了成功,但仍存在一些局限 性,如对复杂环境的适应性、系统精度和稳定性等方面还 有待进一步提高。
测距原理
超声波测距基于声波的传 播速度和往返时间计算距 离。
精度与误差
考虑声波传播速度、温度 和空气密度等因素对测距 精度的影响。
抗干扰能力
优化算法以减少环境噪声
根据系统需求,设计合适的硬件接口,如 GPIO、串口等。
定时器配置
使用定时器产生超声波发送和接收的时序。
传感器数据和控制避障系统。
性能要求
02
根据系统复杂性和数据处理需求,选择具有足够处理能力和I/O
端口的微控制器。
编程语言
03
确保微控制器支持所需的编程语言,以便进行系统开发和编程。
电源模块设计
电源选择
为系统提供稳定的电源,考虑使 用电池或外部电源,以满足系统 长时间运行的需求。
超声波避障课程设计
超声波避障课程设计一、课程目标知识目标:1. 让学生掌握超声波的基本概念,理解其传播原理;2. 使学生了解超声波在避障领域的应用,认识其在现实生活中的重要性;3. 帮助学生理解超声波避障系统的组成及工作原理。
技能目标:1. 培养学生运用所学知识,设计并搭建简单的超声波避障系统的能力;2. 提高学生运用实验方法,分析并解决实际问题的能力;3. 培养学生团队合作和沟通交流的能力。
情感态度价值观目标:1. 培养学生对物理科学的兴趣,激发他们探索未知、勇于创新的热情;2. 培养学生面对问题时,保持积极乐观的心态,勇于克服困难;3. 增强学生的环保意识,让他们明白科学技术在保护环境方面的重要性。
分析课程性质、学生特点和教学要求:本课程为物理学科拓展课程,适用于八年级学生。
学生在本年级已经具备了一定的物理知识基础,对科学实验有较高的兴趣。
课程要求结合课本知识,注重实践操作,让学生在动手实践中掌握超声波避障技术。
二、教学内容1. 超声波基本概念:介绍超声波的定义、传播特性及其在生活中的应用;相关教材章节:第二章第四节《声波的传播》。
2. 超声波传播原理:讲解超声波的传播方程、声速计算及声波反射、折射等现象;相关教材章节:第二章第五节《声波的反射与折射》。
3. 超声波避障原理:分析超声波避障系统的组成、工作原理及其优缺点;相关教材章节:第三章第十节《现代导航与定位技术》。
4. 实践操作:分组进行超声波避障系统的设计与搭建,开展实验操作;相关教材章节:实践活动《设计与制作简单的超声波避障系统》。
5. 实验数据分析:指导学生分析实验数据,探讨影响超声波避障效果的因素;相关教材章节:第四章第七节《实验数据分析》。
6. 案例分享:介绍超声波避障在现实生活中的应用案例,激发学生兴趣;相关教材章节:第五章第一节《物理与现代科技》。
教学进度安排:第1课时:超声波基本概念及传播原理;第2课时:超声波避障原理与实践操作指导;第3课时:分组实验,设计与搭建超声波避障系统;第4课时:实验数据分析与总结,案例分享。
单片机课程设计——超声波避障小车
课程设计说明书(论文)设计题目:超声波避障小车院系:学院班级:设计者:学号:指导教师:设计时间:8.27~9.10课程设计任务书开题报告绪论课题目的通过上学期单片机课程的学习,我们基本掌握了51单片机的基本使用方法,本学期开学初,单片机课程设计给了我们更大的挑战,课题的目的有以下几点。
●进一步熟练掌握单片机的使用方法、提高程序的编写能力●掌握单片机系统外扩器件的连接与使用●提高器件说明书以及时序过程的阅读、理解能力●掌握软件和硬件调试的基本技巧与方法项目研究背景及意义在当今社会,汽车成为了越来越普遍,人们不可缺少的交通工具。
但汽车的不断增加,随之而来就是越来越多的交通事故。
交通事故成为了现在越来越严重的安全隐患。
所以随着汽车工业的快速发展,我们必须加强对汽车安全性能的考虑。
所以,智能汽车概念应运而生,他既是汽车产业的机遇也是汽车产业的挑战。
汽车的智能化必将是未来汽车产业发展的趋势,在这样的背景下,我们开展了基于超声波的智能小车的避障研究。
超声波作为智能车避障的一种重要手段,以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求,在未来汽车智能化进程中必将得到广泛应用。
我国作为一个世界大国,在高科技领域也必须占据一席之地,未来汽车的智能化是汽车产业发展必然的,在这种情况下研究超声波在智能车避障上的应用具有深远意义,这将对我国未来智能汽车的研究在世界高科技领域占据领先地位具有重要作用。
设计要求采用超声波模块实现小车避障功能,实现小车自动避障任务。
1主要设计内容及方案总体方案设计系统采用51单片机作为核心控制单元用于智能车系统的控制,在超声波检测到障碍物之后,主控芯片根据距离值控制直流电机的转动,在与障碍物距离较大的情况下,快速前进,在与障碍物距离较小但还未到达临界转弯方向值的时候,慢速前进。
在与障碍物距离很近需要转向避障时,方案上将尝试进行转向,来进行避障。
系统总体的设计方框图如图2-1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1./* 程序的开头要描述你的设备2.再来要说是脽写的日期版本3.然后碰到问题一次一次都要写清楚4.马达几个驱动电路都要描述5. L = 左6. R = 右7. F = 前8. B = 后9.*/10.#include <Servo.h>11.int pinLB=6; // 定义8脚位左后12.int pinLF=9; // 定义9脚位左前13.14.int pinRB=10; // 定义10脚位右后15.int pinRF=11; // 定义11脚位右前16.17.int inputPin = A0; // 定义超音波信号接收脚位18.int outputPin =A1; // 定义超音波信号发射脚位19.20.int Fspeedd = 0; // 前速21.int Rspeedd = 0; // 右速22.int Lspeedd = 0; // 左速23.int directionn = 0; // 前=8 后=2 左=4 右=624.Servo myservo; // 设 myservo25.int delay_time = 250; // 伺服马达转向后的稳定时间26.27.int Fgo = 8; // 前进28.int Rgo = 6; // 右转29.int Lgo = 4; // 左转30.int Bgo = 2; // 倒车31.32.void setup()33. {34. Serial.begin(9600); // 定义马达输出脚位35. pinMode(pinLB,OUTPUT); // 脚位 8 (PWM)36. pinMode(pinLF,OUTPUT); // 脚位 9 (PWM)37. pinMode(pinRB,OUTPUT); // 脚位 10 (PWM)38. pinMode(pinRF,OUTPUT); // 脚位 11 (PWM)39.40. pinMode(inputPin, INPUT); // 定义超音波输入脚位41. pinMode(outputPin, OUTPUT); // 定义超音波输出脚位42.43. myservo.attach(5); // 定义伺服马达输出第5脚位(PWM)44. }45.void advance(int a) // 前进46. {47. digitalWrite(pinRB,LOW); // 使马达(右后)动作48. digitalWrite(pinRF,HIGH);49. digitalWrite(pinLB,LOW); // 使马达(左后)动作50. digitalWrite(pinLF,HIGH);51. delay(a * 50);52. }53.54.void right(int b) //右转(单轮)55. {56. digitalWrite(pinRB,LOW); //使马达(右后)动作57. digitalWrite(pinRF,HIGH);58. digitalWrite(pinLB,HIGH);59. digitalWrite(pinLF,HIGH);60. delay(b * 20);61. }62.void left(int c) //左转(单轮)63. {64. digitalWrite(pinRB,HIGH);65. digitalWrite(pinRF,HIGH);66. digitalWrite(pinLB,LOW); //使马达(左后)动作67. digitalWrite(pinLF,HIGH);68. delay(c * 20);69. }70.void turnR(int d) //右转(双轮)71. {72. digitalWrite(pinRB,LOW); //使马达(右后)动作73. digitalWrite(pinRF,HIGH);74. digitalWrite(pinLB,HIGH);75. digitalWrite(pinLF,LOW); //使马达(左前)动作76. delay(d * 15);77. }78.void turnL(int e) //左转(双轮)79. {80. digitalWrite(pinRB,HIGH);81. digitalWrite(pinRF,LOW); //使马达(右前)动作82. digitalWrite(pinLB,LOW); //使马达(左后)动作83. digitalWrite(pinLF,HIGH);84. delay(e * 15);85. }86.void stopp(int f) //停止87. {88. digitalWrite(pinRB,HIGH);89. digitalWrite(pinRF,HIGH);90. digitalWrite(pinLB,HIGH);91. digitalWrite(pinLF,HIGH);92. delay(f * 50);93. }94.void back(int g) //后退95. {96.97. digitalWrite(pinRB,HIGH); //使马达(右后)动作98. digitalWrite(pinRF,LOW);99. digitalWrite(pinLB,HIGH); //使马达(左后)动作100. digitalWrite(pinLF,LOW);101. delay(g * 50);102. }103.104.void detection() //测量3个角度(0.90.179)105. {106.int delay_time = 250; // 伺服马达转向后的稳定时间107. ask_pin_F(); // 读取前方距离108.109.if(Fspeedd < 5) // 假如前方距离小于10公分110. {111. stopp(1); // 清除输出数据112. back(2); // 后退 0.2秒113. }114.115.if(Fspeedd < 10) // 假如前方距离小于25公分116. {117. stopp(1); // 清除输出数据118. ask_pin_L(); // 读取左方距离119. delay(delay_time); // 等待伺服马达稳定120. ask_pin_R(); // 读取右方距离121. delay(delay_time); // 等待伺服马达稳定122.123.if(Lspeedd > Rspeedd) //假如左边距离大于右边距离124. {125. directionn = Rgo; //向右走126. }127.128.if(Lspeedd <= Rspeedd) //假如左边距离小于或等于右边距离129. {130. directionn = Lgo; //向左走131. }132.133.if (Lspeedd < 5 && Rspeedd < 5) //假如左边距离和右边距离皆小于10公分134. {135. directionn = Bgo; //向后走136. }137. }138.else//加如前方不小于(大于)25公分139. {140. directionn = Fgo; //向前走141. }142.143. }144.void ask_pin_F() // 量出前方距离145. {146. myservo.write(90);147. digitalWrite(outputPin, LOW); // 让超声波发射低电压2μs148. delayMicroseconds(2);149. digitalWrite(outputPin, HIGH); // 让超声波发射高电压10μs,这里至少是10μs150. delayMicroseconds(10);151. digitalWrite(outputPin, LOW); // 维持超声波发射低电压152.float Fdistance = pulseIn(inputPin, HIGH); // 读差相差时间153. Fdistance= Fdistance/5.8/10; // 将时间转为距离距离(单位:公分)154. Serial.print("F distance:"); //输出距离(单位:公分)155. Serial.println(Fdistance); //显示距离156. Fspeedd = Fdistance; // 将距离读入Fspeedd(前速)157. }158.void ask_pin_L() // 量出左边距离159. {160. myservo.write(5);161. delay(delay_time);162. digitalWrite(outputPin, LOW); // 让超声波发射低电压2μs163. delayMicroseconds(2);164. digitalWrite(outputPin, HIGH); // 让超声波发射高电压10μs,这里至少是10μs165. delayMicroseconds(10);166. digitalWrite(outputPin, LOW); // 维持超声波发射低电压167.float Ldistance = pulseIn(inputPin, HIGH); // 读差相差时间168. Ldistance= Ldistance/5.8/10; // 将时间转为距离距离(单位:公分)169. Serial.print("L distance:"); //输出距离(单位:公分)170. Serial.println(Ldistance); //显示距离171. Lspeedd = Ldistance; // 将距离读入Lspeedd(左速)172. }173.void ask_pin_R() // 量出右边距离174. {175. myservo.write(177);176. delay(delay_time);177. digitalWrite(outputPin, LOW); // 让超声波发射低电压2μs178. delayMicroseconds(2);179. digitalWrite(outputPin, HIGH); // 让超声波发射高电压10μs,这里至少是10μs180. delayMicroseconds(10);181. digitalWrite(outputPin, LOW); // 维持超声波发射低电压182.float Rdistance = pulseIn(inputPin, HIGH); // 读差相差时间183. Rdistance= Rdistance/5.8/10; // 将时间转为距离距离(单位:公分)184. Serial.print("R distance:"); //输出距离(单位:公分)185. Serial.println(Rdistance); //显示距离186. Rspeedd = Rdistance; // 将距离读入Rspeedd(右速)187. }188.189.void loop()190. {191. myservo.write(90); //让伺服马达回归预备位置准备下一次的测量192. detection(); //测量角度并且判断要往哪一方向移动193.194.if(directionn == 2) //假如directionn(方向) = 2(倒车)195. {196. back(8); // 倒退(车)197. turnL(2); //些微向左方移动(防止卡在死巷里)198. Serial.print(" Reverse "); //显示方向(倒退)199. }200.if(directionn == 6) //假如directionn(方向) = 6(右转)201. {202. back(1);203. turnR(6); // 右转204. Serial.print(" Right "); //显示方向(左转)205. }206.if(directionn == 4) //假如directionn(方向) = 4(左转)207. {208. back(1);209. turnL(6); // 左转210. Serial.print(" Left "); //显示方向(右转)211. }212.if(directionn == 8) //假如directionn(方向) = 8(前进)213. {214. advance(1); // 正常前进215. Serial.print(" Advance "); //显示方向(前进)216. Serial.print(" ");217. }218. }。