OIV Stats2010
阿里云内容安全API参考(检测服务)说明书

内容安全API参考(检测服务)··法律声明法律声明阿里云提醒您在阅读或使用本文档之前仔细阅读、充分理解本法律声明各条款的内容。
如果您阅读或使用本文档,您的阅读或使用行为将被视为对本声明全部内容的认可。
1. 您应当通过阿里云网站或阿里云提供的其他授权通道下载、获取本文档,且仅能用于自身的合法合规的业务活动。
本文档的内容视为阿里云的保密信息,您应当严格遵守保密义务;未经阿里云事先书面同意,您不得向任何第三方披露本手册内容或提供给任何第三方使用。
2. 未经阿里云事先书面许可,任何单位、公司或个人不得擅自摘抄、翻译、复制本文档内容的部分或全部,不得以任何方式或途径进行传播和宣传。
3. 由于产品版本升级、调整或其他原因,本文档内容有可能变更。
阿里云保留在没有任何通知或者提示下对本文档的内容进行修改的权利,并在阿里云授权通道中不时发布更新后的用户文档。
您应当实时关注用户文档的版本变更并通过阿里云授权渠道下载、获取最新版的用户文档。
4. 本文档仅作为用户使用阿里云产品及服务的参考性指引,阿里云以产品及服务的“现状”、“有缺陷”和“当前功能”的状态提供本文档。
阿里云在现有技术的基础上尽最大努力提供相应的介绍及操作指引,但阿里云在此明确声明对本文档内容的准确性、完整性、适用性、可靠性等不作任何明示或暗示的保证。
任何单位、公司或个人因为下载、使用或信赖本文档而发生任何差错或经济损失的,阿里云不承担任何法律责任。
在任何情况下,阿里云均不对任何间接性、后果性、惩戒性、偶然性、特殊性或刑罚性的损害,包括用户使用或信赖本文档而遭受的利润损失,承担责任(即使阿里云已被告知该等损失的可能性)。
5. 阿里云网站上所有内容,包括但不限于著作、产品、图片、档案、资讯、资料、网站架构、网站画面的安排、网页设计,均由阿里云和/或其关联公司依法拥有其知识产权,包括但不限于商标权、专利权、著作权、商业秘密等。
非经阿里云和/或其关联公司书面同意,任何人不得擅自使用、修改、复制、公开传播、改变、散布、发行或公开发表阿里云网站、产品程序或内容。
微软消息分析器:一款高级网络包分析器说明书

Neil B MartinT est Manager WSSC-Interop and T oolsMicrosoft CorporationMicrosoft Message Analyzer Packet Analysis at a Higher LevelContent•Packet Analyzer -review •Abstracting views of protocols •Alternative data sources •ETW•Remote Capture•Bluetooth•USB•Evtx•Logs filesMessage Analyzer –What is it?• A packet analyzer is a computer program or a piece of computer hardware that can intercept and log traffic passing over all or part of a network•Packet analyzers capture network packets in real time and display them in human-readable format•WireShark, Microsoft NetMon3.4•These tools are dissectors•If they recognize a packet they dissect it and display the inner fields of the packet•The parsers are written based on the protocol specifications or in some cases through reverse engineering of the protocols whenno specification is available•Dissection and Abstraction•We want to allow a higher level of abstraction view of protcols•Pattern Matching•Match up request/response pairs where possible•Called an operation•Different Viewers and Charts•Addressing many of the challenges of diagnosing modern networks •Protocol Validation•Identify packets that do not match the specification•Data capture from multiple sources•NDIS, Bluetooth, USB, Windows Firewall Layer, Web Proxy•Header only network capture•Reduce data in volume scenarios•Correlation of data across multiple data sources and logs•Load and display multiple data source•Message Analyzer captures ETW •ETW -Event Trace for Windows •Message Capture from:•Traditional NDIS traffic from the Network Adapter •Windows Filtering Platform 9aka Firewall)•Web proxy•USB ports•Bluetooth•Windows SMB Client•Windows SMB Server ……•E vent T racing for W indows ETW•High-resolution (<<100µs)logging infrastructure allows any component to tell the outside world what it is currently doing by firing ETW events.• A powerful diagnostic tool to log every methods/lines inside the code with reasonable performance fordebugging/troubleshooting.•MSDN on ETW/en-us/library/bb968803(VS.85).aspxAll Windows ETW Sources are available to Message Analyzer•Capability to perform remote capture •Select machine and give credentials•Collect data via ETW from NIC on remote machine•Powerful, extensible viewing and analysis •Browse, Select, View•Browse for messages from various sources (live, or stored)•Select a set of messages from those sources by characteristic(s)•View messages in a provided viewer, configure or build your own • A new high-level grid view•High level “Operations” view with automatic re-assembly•“Bubbling up” of errors in the stack to the top level•Ability to drill down the stack to underlying messages and/or packets•On the fly grouping, filtering, finding, or sorting by any message property •Payload rendering•V alidation of message structures, behavior, and architecture•Does the protocol comply with the specifications?•Over 450 published specifications for Windows Protocols(as of Windows 8.1)(/en-us/library/gg685446.aspx)Available online and as PDFContinue to publish new documents with each release of Windows •Continue to develop tools and technology to aid with the development of protocol documents, parsers and test technologyHow to get MA: /en-us/download/details.aspx?id=40308 How to get help: Blog,Operating Guide, T echnet Forum for Message Analyzer •We invite you to Explore Message Analyzer•Connect Community•https:///site216/。
《数学建模与实验》习题库a
Hyundai 车价$12,400 预付$500 月利率 6.5%直到 48 个月
你每个月为买车最多能付 475 美元。利用动力系统模型来决定你应该买哪家公司的车。
1.2 习题
1.从引进到 Tasmania 岛的新环境里的养群数量的增长得到下面的数据。
年
1814 1824 1834 1844 1854 1864
1810
7,240,000
1820
9,638,000
1830
12,866,000
1840
17,069,000
1850
23,192,000
1860
31,443,000
1870
38,558,000
1880
50,156,000
1890
62,948,000
1900
75,995,000
1910
91,972,000Leabharlann 数量 125275
830
1200 1750 1650
根据数据画图形,能看出某种趋势吗?画出 1814 年后数量变化对年份的图形。构建一个
能合理地近似描述你所观察到的变化的离散动力系统。
2.下列数据表示从 1790 年到 2000 年的美国人口数据
年份
人口
1790
3,929,000
1800
5,308,000
《数学建模与实验》习题库 a
感谢信息与计算科学 02 级的五位同学, 作为毕业设计英文翻译任务完成了此习题库的 构建工作, 他(她)们的工作分别为:
刘 静: 第 1, 4 章; 朱佳琦: 第 2, 3, 6 章; 李新颖: 第 5, 7 章; 朱晓强: 第 8, 9, 10 章; 甘永生: 第 11, 12 章.
罗克韦尔自动化 Logix 5000 控制系统参考手册说明书
Reference ManualOriginal InstructionsIntegrated ArchitectureLogix Control Systems Recommended Literature Controllers: Bulletin 1756, 1769, 5069Drives: Bulletin 20G, 20J, 2198I/O and Communication Modules: Bulletin 1715, 1756, 5069, 5094Graphic Terminals: Bulletin 2711P, 2713P, 2715PSoftware: Bulletin 9324Links to some of the most common manuals for products that are typically included in a Logix 5000™ control system. It also provides links to manuals that can help you:•Implement an EtherNet/IP network.•Develop a Logix controller-based safety system.•Use Studio 5000 Logix Designer® application to program your control system.•Use Studio 5000 View Designer® application to configure and program your operator interface.•Configure a motion solution.•Configure and use Rockwell Automation products to improve the security of your automation system. Topic PageSummary of Changes2Products Covered in this Publication2Logix 5000 Controllers Resources3Network and Communication Modules Resources4Instructions and Programming Resources4Security Resources5I/O Modules and Adapters Resources6Operator Interface Resources6Motion Resources7Drives Resources7Additional Resources92Rockwell Automation Publication IASIMP-RM001J-EN-P - September 2021Logix Control Systems Recommended Literature Reference ManualSummary of ChangesThis publication contains the following new or updated information. This list includes substantive updates only and is not intended to reflect all changes.Products Covered in this PublicationYou can find common manuals for these products in this publication.Controllers•1756 Series ControlLogix® Controllers, GuardLogix® Controllers, ControlLogix Redundancy Modules •5069 Series CompactLogix™ Controllers, Compact GuardLogix Controllers •1769 Series CompactLogix Controllers, Compact GuardLogix ControllersDrives•Kinetix® 5100, 5300, 5500, and 5700 Servo Drives •PowerFlex® 755T Drives with TotalFORCE® technologyStudio 5000 Design Environment•Studio 5000 Logix Designer® application •Studio 5000 View Designer® application •Studio 5000® Application Code ManagerI/O and Communication Modules•1756 ControlLogix I/O Modules and EtherNet/IP Communication Modules •Compact 5000™ I/O Modules and EtherNet/IP Communication Modules •FLEX 5000™ I/O Modules and EtherNet/IP Communication Modules •1715 Redundant I/O Modules •EtherNet/IP AdaptersOperator Interface•PanelView™ 5510 and PanelView 5310 Terminals•PanelView™ Plus 7 Standard and Performance TerminalsTopicPage Added ControlLogix 5580 Redundant Controllers User Manual to Logix 5000 Controllers resources 3Added Logix Designer Compare Tool User Manual to Programming resources 5Added CIP Security Proxy User Manual to Security resources5Added Studio 5000 View Designer software manuals to Operator Interface resources 6Added Kinetix 5300 Single-axis EtherNet/IP Servo Drives manuals to Drives resources7Added PowerFlex Drives with TotalFORCE Control Programming Manual - Firmware Revision 10 or later to Drives resources 7Added replacement guides to Drives resources7Logix Control Systems Recommended Literature Reference ManualOther Integrated Architecture System ProductsFor products not covered in this manual, go to the Technical Documentation Center at rok.auto/techdocs to browse documentation collections organized by product family. Or go to Literature Library at rok.auto/literature to search for documentation by catalog number, product name, or publication number.Logix 5000 Controllers ResourcesReference and task-based information to help you install, configure, and operate Logix controllers.Selection and Specifications•1756-SG001, ControlLogix System Selection Guide•1756-TD001, ControlLogix and GuardLogix Controllers Technical Data Specifications•1769-SG001, CompactLogix System Selection Guide•5069-TD002, CompactLogix and Compact GuardLogix Technical Data SpecificationsDesign Considerations•1756-RM094, Logix 5000™ Controllers Design Considerations Reference Manual•LOGIX-RM002, Estimated Logix 5000 Controller Instruction Execution Times Reference ManualManuals•ControlLogix and GuardLogix controllers user manuals-1756-UM543, ControlLogix® 5580 and GuardLogix 5580 Controllers User Manual-1756-UM015, ControlLogix 5580 Redundant Controllers User Manual-1756-UM022, GuardLogix 5570 Controllers User Manual-1756-UM001, ControlLogix System User Manual (for ControlLogix® 5570 and ControlLogix® 5560 controllers)-1756-UM535, ControlLogix 5570/5560 Redundancy User Manual•CompactLogix and Compact GuardLogix controllers user manuals-5069-UM002, CompactLogix 5480 User Manual-5069-UM001, CompactLogix 5380 and Compact GuardLogix 5380 Controllers User Manual-1769-UM021, CompactLogix 5370 Controllers User Manual-1769-UM022, Compact GuardLogix 5370 Controllers User Manual•Safety system reference manuals for GuardLogix and Compact GuardLogix controllers-1756-RM012, GuardLogix 5580 and Compact GuardLogix 5380 Controller Systems Safety Reference Manual-1756-RM099, GuardLogix 5570 and Compact GuardLogix 5370 Controller Systems Safety Reference Manual-1756-RM093, GuardLogix Controller Systems Safety Reference Manual (for GuardLogix 5570, GuardLogix 5560, and 1768 CompactGuardLogix Safety controllers using RSLogix 5000® version 20 and earlier)Rockwell Automation Publication IASIMP-RM001J-EN-P - September 20213Logix Control Systems Recommended Literature Reference ManualReplacement Guidelines•1756-RM100, Replacement Guidelines: Logix 5000 Controllers Reference ManualGuidelines for replacing the following:-ControlLogix 5560 or ControlLogix 5570 controller with a ControlLogix 5580 controller-GuardLogix 5560 or GuardLogix 5570 controller with a GuardLogix 5580 controller-CompactLogix5370L3controller to CompactLogix 5380 controllerNetwork and Communication Modules ResourcesReference and task-based information to help you design and implement an Ethernet network, and use EtherNet/IP communication modules in a Logix 5000 control system.Selection and Specifications•1756-TD003, 1756 ControlLogix Communication Modules SpecificationsDesign and Application Considerations•ENET-RM002, Ethernet Design Considerations Reference Manual•ENET-AT001, EtherNet/IP QuickConnect Application Technique•ENET-AT002, EtherNet/IP Socket Interface Application Technique•ENET-AT006, EtherNet/IP Parallel Redundancy Protocol Application Technique•ENET-AT007, EtherNet/IP Device Level Ring Application TechniqueManuals•ENET-UM006, EtherNet/IP Network Configuration User Manual-Overview of EtherNet/IP communication modules in Logix 5000 control systems; describes features and tasks that are common toEtherNet/IP network devices•ENET-UM004, ControlLogix EtherNet/IP Network Devices User Manual-Describes features and tasks that are specific to 1756 ControlLogix EtherNet/IP communication modules in Logix 5000 control systems •CNET-RM001, ControlNet to EtherNet/IP Migration Reference Manual-Provides information to migrate from an existing ControlNet® network to an EtherNet/IP™ networkInstructions and Programming ResourcesInformation to help you use Studio 5000 Logix Designer application to program your control system.Logix 5000 Controllers Instructions•1756-RM003, General Instructions Reference Manual•MOTION-RM002, Motion Instructions Reference Manual•1756-RM006, Advanced Process Control and Drives Instructions Reference Manual•1756-RM095, GuardLogix Safety Application Instruction Set Reference Manual•1756-RM087, Execution Time and Memory Use Reference Manual4Rockwell Automation Publication IASIMP-RM001J-EN-P - September 2021Logix Control Systems Recommended Literature Reference Manual Logix 5000 Controllers Common ProceduresThese manuals describe common procedures for programming and operating Logix 5000 controllers: 1756 ControlLogix, 1756 GuardLogix, 1769 CompactLogix, 1769 Compact GuardLogix, 5069 CompactLogix, and Studio 5000 Logix Emulate™.1756-PM001, Logix 5000 Controllers Common Procedures Programming Manual (provides links to the manuals in the following list)•1756-PM010, Add-On Instructions Programming Manual•1756-PM013, ASCII Strings Programming Manual•1756-PM020, Data Access Programming Manual•1756-PM002, EDS AOP Guidelines for Studio 5000 Logix Designer Programming Manual•1756-PM009, Function Block Diagram Programming Manual•1756-PM018, IEC 61131-3 Compliance Programming Manual•1756-PM019, Import/Export Project Components Programming Manual•1756-PM015, Information and Status Programming Manual•1756-PM004, I/O and Tag Data Programming Manual•1756-PM008, Ladder Diagram Programming Manual•1756-PM014, Major, Minor, and I/O Faults Programming Manual•1756-PM012, Messages Programming Manual•1756-PM017, Nonvolatile Memory Card Programming Manual•1756-PM011, Produced and Consumed Tags Programming Manual•1756-PM021, Program Parameters Programming Manual•1756-PM016, Security Programming Manual•1756-PM006, Sequential Function Charts Programming Manual•1756-PM007, Structured Text Programming Manual•1756-PM005, Tasks, Programs, and Routines Programming ManualProgramming Manuals•LOGIX-UM003, Studio 5000 Application Code Manager User Manual•LOGIX-UM006, Logix Designer and Library Object Manager User Manual•LDCT-UM001, Logix Designer Compare Tool User Manual•LOGIX-UM001, PhaseManager™ Software User Manual•1756-RM084, Import/Export Reference Manual•1756-RM085, Converting PLC-5® or SLC™ 500 Logic to Logix5550® Logic Reference ManualSecurity ResourcesResources to help you configure and use Rockwell Automation products to improve the security of your automation system.•SECURE-UM001, Security Configuration User Manual•SECURE-RM001, System Security Design Guidelines•SECURE-AT001, CIP Security™ with Rockwell Automation Products Application Technique•1783-UM013, CIP Security Proxy User ManualRockwell Automation Publication IASIMP-RM001J-EN-P - September 20215Logix Control Systems Recommended Literature Reference ManualI/O Modules and Adapters ResourcesReference and task-based information to help you install, configure, and operate I/O modules in a Logix 5000 control system. The products in this section are compatible with our newest controller platforms. To find manuals for other distributed I/O families, visit our Technical Documentation Center at rok.auto/techdocs.Selection and Specifications•1756-TD002, ControlLogix I/O Modules Technical Data Specifications•1715-TD001, 1715 Redundant I/O System Technical Data Specifications•5069-TD001, Compact 5000 I/O Modules and EtherNet/IP Adapters Technical Data Specifications•5094-TD001, FLEX 5000 I/O Modules Technical Data SpecificationsManuals•1756 ControlLogix I/O Modules-1756-UM058, ControlLogix Digital I/O Modules User Manual-1756-UM009, ControlLogix Analog I/O Modules User Manual•1715 Redundant I/O System-1715-UM001, 1715 Redundant I/O System User Manual•Compact5000I/O Modules-5069-UM007, Compact 5000 EtherNet/IP Adapters User Manual-5069-UM004, Compact 5000 Digital I/O Modules User Manual (includes standard and safety I/O)-5069-UM005, Compact 5000 Analog I/O Modules User Manual-5069-UM006, Compact 5000 Series High-speed Counter Modules User Manual-5069-UM003, Compact 5000 I/O Serial Module User Manual•FLEX 5000 I/O Modules-5094-UM005, FLEX 5000 EtherNet/IP Adapters User Manual-5094-UM001, FLEX 5000 Standard and Safety Digital I/O Modules User Manual-5094-UM002, FLEX 5000 Analog I/O Modules User Manual-5094-UM003, FLEX 5000 High-speed Counter Module User Manual-5094-UM007, FLEX 5000 Analog Isolated Current/Voltage/HART Input and Output ModulesOperator Interface ResourcesReference and task-based information to help you install, configure, and operate graphic terminals in a Logix 5000 control system. To find manuals for other PanelView products, visit our Technical Documentation Center at rok.auto/techdocs.Selection and Specifications•VIEW-SG001, Visualization Solutions Selection Guide•2715P-TD001, PanelView 5510 Terminals Technical Data Specifications•2713P-TD001, PanelView 5310 Terminals Technical Data Specifications•2711P-TD008, Bulletin 2711P PanelView Plus 7 Standard Terminals Technical Data Specifications•2711P-TD009, Bulletin 2711P PanelView Plus 7 Performance Terminals Technical Data Specifications6Rockwell Automation Publication IASIMP-RM001J-EN-P - September 2021Logix Control Systems Recommended Literature Reference ManualManuals•9343-GR001, Studio 5000 View Designer Getting Results Guide•9324-UM001, Studio 5000 View Designer User Manual•2715P-UM001, PanelView 5510 Terminals User Manual•2713P-UM001, PanelView 5310 Terminals User Manual•2711P-UM007, Bulletin 2711P PanelView Plus 7 Standard Terminals User Manual•2711P-UM008, Bulletin 2711P PanelView Plus 7 Performance Terminals User ManualMotion ResourcesReference and task-based information to help you configure and startup a motion solution.•MOTION-UM003, Integrated Motion on the EtherNet/IP Network Configuration and Startup User Manual•MOTION-RM003, Integrated Motion on the EtherNet/IP Network Reference Manual (AXIS_CIP_DRIVE attributes and integrated motion on the EtherNet/IP network control modes and methods)•MOTION-UM002, Motion Coordinate System User Manual•MOTION-AT005, Motion System Tuning Application Technique (tuning a Kinetix drive system)•IA-AT003, Integrated Architecture and CIP Sync™ Configuration Application Technique•MOTION-UM001, SERCOS and Analog Motion Configuration and Startup User ManualDrives ResourcesReference and task-based information to help you install, configure, and operate Allen-Bradley® Drives in a Logix 5000 control system. To find manuals for other Kinetix Servo Drive or PowerFlex Drive products, visit our Technical Documentation Center at rok.auto/techdocs.Selection and Specification•Kinetix EtherNet/IP Servo Drives-KNX-SG001, Kinetix Motion Control Selection Guide-KNX-TD003, Kinetix Servo Drives Specifications Technical Data-KNX-TD004, Kinetix Motion Accessories Specifications Technical Data•PowerFlex 755T AC Drives-PFLEX-SGOO2, PowerFlex Low Voltage Drive Selection Guide-750-TD100, PowerFlex 750-series Products with TotalFORCE Control Technical DataRockwell Automation Publication IASIMP-RM001J-EN-P - September 20217Logix Control Systems Recommended Literature Reference ManualManuals•Kinetix 5100 Single-axis EtherNet/IP Servo Drives-KNX-RM011, Kinetix 5100 Drive Systems Design Guide-2198-UM004, Kinetix 5100 Single-axis EtherNet/IP Servo Drives User Manual•Kinetix 5300 Single-axis EtherNet/IP Servo Drives-KNX-RM012, Kinetix 5300 Drive Systems Design Guide-2198-UM005, Kinetix 5300 Single-axis EtherNet/IP Servo Drives User Manual•Kinetix 5500 EtherNet/IP Servo Drives-KNX-RM009, Kinetix 5500 Drive System Design Guide-2198-UM001, Kinetix 5500 Servo Drives User Manual•Kinetix 5700 EtherNet/IP Servo Drives-KNX-RM010, Kinetix 5700 Drive Systems Design Guide-2198-UM002, Kinetix 5700 Servo Drives User Manual-2198-RM001, Kinetix 5700 Safe Monitor Functions Safety Reference Manual•PowerFlex 755T AC Drives-750-UM004, PowerFlex 755/755T Integrated Safety - Safe Torque Off Option Module User Manual-750-UM005, PowerFlex 755/755T Integrated Safety Functions Option Module User Manual-750-PM101, PowerFlex Drives with TotalFORCE Control Programming Manual - Firmware Revision 10 or later-750-PM100, PowerFlex Drives with TotalFORCE Control Programming Manual - Firmware Revision 6 or earlier-750-RM100, PowerFlex 750-Series Products with TotalFORCE Control Reference ManualReplacement Guidelines•Kinetix 5100 EtherNet/IP Servo Drives-2198-RM004, Kinetix 300 to Kinetix 5100 Servo Drives-2198-RM003, Ultra3000 to Kinetix 5100 Servo Drives•Kinetix 5300 EtherNet/IP Servo Drives-2198-RM005, Kinetix 350 to Kinetix 5300 Servo Drives-2198-RM006, Ultra3000 Digital Servo Drives to Kinetix 5300 Servo Drives•Kinetix 5500 EtherNet/IP Servo Drives-2093-AP001, Kinetix 2000 Multi-axis Servo Drives to Kinetix 5500 Servo Drives-2098-AP002, Ultra3000 Digital Servo Drives to Kinetix 5500 Servo Drives•Kinetix 5700 EtherNet/IP Servo Drives-2198-RM002, Kinetix 6000 Servo Drives to Kinetix 5700 Servo Drives•PowerFlex 755T AC Drives-750-RM003, PowerFlex 700AFE to PowerFlex 755TM Regenerative Bus Supply-750-RM004, PowerFlex 700S Phase II Drives to PowerFlex 755TL/TR Drives and PowerFlex 755TM Common Bus Inverters 8Rockwell Automation Publication IASIMP-RM001J-EN-P - September 2021Rockwell Automation Publication IASIMP-RM001J-EN-P - September 20219Logix Control Systems Recommended Literature Reference ManualAdditional ResourcesThese resources also provide helpful information for Logix 5000 control systems.You can view or download publications at rok.auto/literatureResourceDescriptionProduct Selection and Configuration website, rok.auto/systemtoolsProvides tools for product selection, control systems configuration, safety systems configuration, and power and motion systems.Sample Code Library, /global/sample-code/overview.page Share or download logic, HMI, and drives code.Industrial Components Preventive Maintenance, Enclosures, and Contact Ratings Specifications, publication IC-TD002Provides a quick reference tool for Allen-Bradley industrial automation controls and assemblies.Safety Guidelines for the Application, Installation, and Maintenance of Solid-State Control, publication SGI-1.1Designed to harmonize with NEMA Standards Publication No. ICS 1.1-1987 and provides general guidelines for the application, installation, and maintenance of solid-state control in the form of individual devices or packaged assemblies incorporating solid-state components.Industrial Automation Wiring and Grounding Guidelines, publication 1770-4.1Provides general guidelines for installing a Rockwell Automation industrial system.Product Certifications website, rok.auto/certifications .Provides declarations of conformity, certificates, and other certification details.Publication IASIMP-RM001J-EN-P - September 2021Supersedes Publication IASIMP-RM001I-EN-P - May 2020Copyright © 2021 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.Rockwell Automation SupportUse these resources to access support information.Documentation FeedbackYour comments help us serve your documentation needs better. If you have any suggestions on how to improve our content, complete the form at rok.auto/docfeedback .Technical Support Center Find help with how-to videos, FAQs, chat, user forums, and product notification updates.rok.auto/support KnowledgebaseAccess Knowledgebase articles.rok.auto/knowledgebase Local Technical Support Phone Numbers Locate the telephone number for your country.rok.auto/phonesupport Technical Documentation Center Access technical documentation organized by product family.rok.auto/techdocs Literature LibrarySearch for installation instructions, manuals, brochures, and technical data publications.rok.auto/literature Product Compatibility and Download Center (PCDC)Get help determining how products interact, check features and capabilities, and find associated firmware.rok.auto/pcdcRockwell Automation maintains current product environmental certification information on its website at rok.auto/pec .Allen-Bradley, Compact 5000, CompactLogix, ControlLogix, expanding human possibility, FactoryTalk, FLEX 5000, GuardLogix, Integrated Architecture, Kinetix, Logix 5000, PanelView, PhaseManager, PLC-5, PowerFlex, Rockwell Automation, Rockwell Software, RSLogix 5000, SequenceManager, SLC, Studio 5000 Logix Designer, Studio 5000 Logix Emulate, Studio 5000 View Designer, and TotalFORCE are trademarks of Rockwell Automation, Inc.CIP Security, CIP Sync, ControlNet, DeviceNet, and EtherNet/IP are trademarks of ODVA, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Rockwell Otomasyon Ticaret A.Ş. Kar Plaza İş Merkezi E Blok Kat:6 34752, İçerenkÖy, İstanbul, Tel: +90 (216) 5698400 EEE YÖnetmeli ğine Uygundur。
[zh-cn]SharePoint_2010_Overview_Evaluation_Guide
![[zh-cn]SharePoint_2010_Overview_Evaluation_Guide](https://img.taocdn.com/s3/m/9ba01c25ccbff121dd36830d.png)
内容提要
这个评估指南的目的是让您对Microsoft SharePoint 2010的设计目标和功能集有一个深刻的了解,对 产品的应用进行性掌握。它提供了SharePoint 2010的解决方案及其优势概述介绍,同时,在 SharePoint网站、社会网络、搜索技术、商业智能、企业内容管理和复合应用程序等领域的全新与 改进功能方面,将进行说明。它还为管理人员和开发人员提供了产品主要功能领域的有用信息。 本指南的最终目标是协助读者全面掌握和有效评估SharePoint 2010。本指南意在让任何一个对 SharePoint 2010感兴趣的人可以了解更多。 要获取有关SharePoint 2010的最新信息,请访问.其他的产 品信息和相关资源,参见本指南中的―适用于SharePoint 2010评估的相关资源‖ 部分。
这些协作功能是创建丰富的商业产品应用程序的重要因素;Microsoft SharePoint 2010 采用、扩展 这些功能的同时,在建立丰富的企业产品解决方案中添加了许多功能水平。这些附加功能正是本文 的重点。
6
当考虑企业业务协作解决方案的SharePoint 2010 时,有6个主要功能领域可供探索:
SharePoint 2010
SharePoint 2010是企业和Web的商业合作平台。这个版本的SharePoint 在尽可能广泛的意识中促进 了业务合作,利用其丰富的集成功能设置,让同事、合作伙伴、客户以全新的、更有效的 方式共同协作。SharePoint 2010的功能进一步增强甚至更加深入,目的是使用 Microsoft Office 2010和其他产品,比如Project Server 2010、 Visio 2010 等等,可以更好地工作。 SharePoint Foundation SharePoint Foundation 2010是Microsoft Windows SharePoint Services (WSS)的新版本。它采用操作系 统和数据库服务来支持从一个工作组的团队网站到大企业为数以万计的雇工及工作人员提供的门户 解决方案,再到一个支持上百万观众的企业互联网网站。 Microsoft SharePoint 2010 是基于SharePoint Foundation 2010 建立起来的,提供一个企业级规模功能 的综合解决方案来满足紧要需求,比如管理内容和业务流程,简化人们跨边界查找、共享信息的途 径。
Some Recent Aspects of Differential Game Theory

Dyn Games Appl(2011)1:74–114DOI10.1007/s13235-010-0005-0Some Recent Aspects of Differential Game TheoryR.Buckdahn·P.Cardaliaguet·M.QuincampoixPublished online:5October2010©Springer-Verlag2010Abstract This survey paper presents some new advances in theoretical aspects of dif-ferential game theory.We particular focus on three topics:differential games with state constraints;backward stochastic differential equations approach to stochastic differential games;differential games with incomplete information.We also address some recent devel-opment in nonzero-sum differential games(analysis of systems of Hamilton–Jacobi equa-tions by conservation laws methods;differential games with a large number of players,i.e., mean-field games)and long-time average of zero-sum differential games.Keywords Differential game·Viscosity solution·System of Hamilton–Jacobi equations·Mean-field games·State-constraints·Backward stochastic differential equations·Incomplete information1IntroductionThis survey paper presents some recent results in differential game theory.In order to keep the presentation at a reasonable size,we have chosen to describe in full details three topics with which we are particularly familiar,and to give a brief summary of some other research directions.Although this choice does not claim to represent all the recent literature on the R.Buckdahn·M.QuincampoixUniversitéde Brest,Laboratoire de Mathématiques,UMR6205,6Av.Le Gorgeu,BP809,29285Brest, FranceR.Buckdahne-mail:Rainer.Buckdahn@univ-brest.frM.Quincampoixe-mail:Marc.Quincampoix@univ-brest.frP.Cardaliaguet( )Ceremade,UniversitéParis-Dauphine,Place du Maréchal de Lattre de Tassigny,75775Paris Cedex16, Francee-mail:cardaliaguet@ceremade.dauphine.frmore theoretic aspects of differential game theory,we are pretty much confident that it cov-ers a large part of what has recently been written on the subject.It is clear however that the respective part dedicated to each topic is just proportional to our own interest in it,and not to its importance in the literature.The three main topics we have chosen to present in detail are:–Differential games with state constraints,–Backward stochastic differential equation approach to differential games,–Differential games with incomplete information.Before this,we also present more briefly two domains which have been the object of very active research in recent years:–nonzero-sum differential games,–long-time average of differential games.Thefirst section of this survey is dedicated to nonzero-sum differential games.Although zero-sum differential games have attracted a lot of attention in the80–90’s(in particular, thanks to the introduction of viscosity solutions for Hamilton–Jacobi equations),the ad-vances on nonzero-sum differential games have been scarcer,and mainly restricted to linear-quadratic games or stochastic differential games with a nondegenerate diffusion.The main reason for this is that there was very little understanding of the system of Hamilton–Jacobi equations naturally attached to these games.In the recent years the analysis of this sys-tem has been the object of several papers by Bressan and his co-authors.At the same time, nonzero-sum differential games with a very large number of players have been investigated in the terminology of mean-field games by Lasry and Lions.In the second section we briefly sum up some advances in the analysis of the large time behavior of zero-sum differential games.Such problems have been the aim of intense re-search activities in the framework of repeated game theory;it has however only been re-cently investigated for differential games.In the third part of this survey(thefirst one to be the object of a longer development) we investigate the problem of state constraints for differential games,and in particular,for pursuit-evasion games.Even if such class of games has been studied since Isaacs’pioneer-ing work[80],the existence of a value was not known up to recently for these games in a rather general framework.This is mostly due to the lack of regularity of the Hamiltonian and of the value function,which prevents the usual viscosity solution approach to work(Evans and Souganidis[63]):Indeed some controllability conditions on the phase space have to be added in order to prove the existence of the value(Bardi,Koike and Soravia[18]).Following Cardaliaguet,Quincampoix and Saint Pierre[50]and Bettiol,Cardaliaguet and Quincam-poix[26]we explain that,even without controllability conditions,the game has a value and that this value can be characterized as the smallest supersolution of some Hamilton–Jacobi equation with discontinuous Hamiltonian.Next we turn to zero-sum stochastic differential games.Since the pioneering work by Fleming and Souginidis[65]it has been known that such games have a value,at least in a framework of games of the type“nonanticipating strategies against controls”.Unfortunately this notion of strategies is not completely satisfactory,since it presupposes that the players have a full knowledge of their opponent’s control in all states of the world:It would be more natural to assume that the players use strategies which give an answer to the control effectively played by their opponent.On the other hand it seems also natural to consider nonlinear cost functionals and to allow the controls of the players to depend on events of the past which happened before the beginning of the game.The last two points have beeninvestigated in a series of papers by Buckdahn and Li[35,36,39],and an approach more direct than that in[65]has been developed.Thefirst point,together with the two others,will be the object of the fourth part of the survey.In the last part we study differential games with incomplete information.In such games, one of the parameters of the game is chosen at random according to some probability mea-sure and the result is told to one of the players and not to the other.Then the game is played as usual,players observing each other’s control.The main difference with the usual case is that at least one of the players does not know which payoff he is actually optimizing.All the difficulty of this game is to understand what kind of information the informed player has interest in to disclose in order to optimize his payoff,taking thus the risk that his opponent learns his missing information.Such games are the natural extension to differential games of the Aumann–Maschler theory for repeated games[11].Their analysis has been developed in a series of papers by Cardaliaguet[41,43–45]and Cardaliaguet and Rainer[51,52].Throughout these notes we assume the reader to be familiar with the basic results of dif-ferential game theory.Many references can be quoted on this subject:A general introduction for the formal relation between differential games and Hamilton–Jacobi equations(or sys-tem)can be found in the monograph Baçar and Olsder[13].We also refer the reader to the classical monographs by Isaacs[80],Friedman[67]and Krasovskii and Subbotin[83]for early presentations of differential game theory.The recent literature on differential games strongly relies on the notion of viscosity solution:Classical monographs on this subject are Bardi and Capuzzo Dolcetta[17],Barles[19],Fleming and Soner[64],Lions[93]and the survey paper by Crandall,Ishii and Lions[56].In particular[17]contains a good introduc-tion to the viscosity solution aspects of deterministic zero-sum differential games:the proof of the existence and the characterization of a value for a large class of differential games can be found there.Section6is mostly based on the notion of backward stochastic differential equation(BSDE):We refer to El Karoui and Mazliak[60],Ma and Yong[96]and Yong and Zhou[116]for a general presentation.The reader is in particular referred to the work by S.Peng on BSDE methods in stochastic control[101].Let usfinally note that,even if this survey tries to cover a large part of the recent literature on the more theoretical aspects of differential games,we have been obliged to omit some topics:linear-quadratic differential games are not covered by this survey despite their usefulness in applications;however,these games have been already the object of several survey ck of place also prevented us from describing advances in the domain of Dynkin games.2Nonzero-sum Differential GamesIn the recent years,the more striking advances in the analysis of nonzero-sum differential games have been directed in two directions:analysis by P.D.E.methods of Nash feedback equilibria for deterministic differential games;differential games with a very large number of small players(mean-field games).These topics appear as the natural extensions of older results:existence of Nash equilibria in memory strategies and of Nash equilibria in feedback strategies for stochastic differential games,which have also been revisited.2.1Nash Equilibria in Memory StrategiesSince the work of Kononenko[82](see also Kleimenov[81],Tolwinski,Haurie and Leit-mann[114],Gaitsgory and Nitzan[68],Coulomb and Gaitsgory[55]),it has been knownthat deterministic nonzero-sum differential games admit Nash equilibrium payoffs in mem-ory strategies:This result is actually the counterpart of the so-called Folk Theorem in re-peated game theory[100].Recall that a memory(or a nonanticipating)strategy for a player is a strategy where this player takes into account the past controls played by the other play-ers.In contrast a feedback strategy is a strategy which only takes into account the present position of the system.Following[82]Nash equilibrium payoffs in memory strategies are characterized as follows:A payoff is a Nash equilibrium payoff if and only if it is reach-able(i.e.,the players can obtain it by playing some control)and individually rational(the expected payoff for a player lies above its min-max level at any point of the resulting trajec-tory).This result has been recently generalized to stochastic differential games by Buckdahn, Cardaliaguet and Rainer[38](see also Rainer[105])and to games in which players can play random strategies by Souquière[111].2.2Nash Equilibria in Feedback FormAlthough the existence and characterization result of Nash equilibrium payoffs in mem-ory strategies is quite general,it has several major drawbacks.Firstly,there are,in general, infinitely many such Nash equilibria,but there exists—at least up to now—no completely satisfactory way to select one.Secondly,such equilibria are usually based on threatening strategies which are often non credible.Thirdly,the corresponding strategies are,in general, not“time-consistent”and in particular cannot be computed by any kind of“backward in-duction”.For this reason it is desirable tofind more robust notions of Nash equilibria.The best concept at hand is the notion of subgame perfect Nash equilibria.Since the works of Case[54]and Friedman[67],it is known that subgame perfect Nash equilibria are(at least heuristically)given by feedback strategies and that their corresponding payoffs should be the solution of a system of Hamilton–Jacobi equations.Up to now these ideas have been successfully applied to linear-quadratic differential games(Case[54],Starr and Ho[113], ...)and to stochastic differential games with non degenerate viscosity term:In thefirst case,one seeks solutions which are quadratic with respect to the state variable;this leads to the resolution of Riccati equations.In the latter case,the regularizing effect of the non-degenerate diffusion allows us to usefixed point arguments to get either Nash equilibrium payoffs or Nash equilibrium feedbacks.Several approaches have been developed:Borkar and Ghosh[27]consider infinite horizon problems and use the smoothness of the invari-ant measure associated to the S.D.E;Bensoussan and Frehse[21,22]and Mannucci[97] build“regular”Nash equilibrium payoffs satisfying a system of Hamilton–Jacobi equations thanks to elliptic or parabolic P.D.E techniques;Nash equilibrium feedbacks can also be built by backward stochastic differential equations methods like in Hamadène,Lepeltier and Peng[75],Hamadène[74],Lepeltier,Wu and Yu[92].2.3Ill-posedness of the System of HJ EquationsIn a series of articles,Bressan and his co-authors(Bressan and Chen[33,34],Bressan and Priuli[32],Bressan[30,31])have analyzed with the help of P.D.E methods the system of Hamilton–Jacobi equations arising in the construction of feedback Nash equilibria for deter-ministic nonzero-sum games.In state-space dimension1and for thefinite horizon problem, this system takes the form∂V i+H i(x,D V1,...,D V n)=0in R×(0,T),i=1,...,n,coupled with a terminal condition at time T(here n is the number of players and H i is the Hamiltonian of player i,V i(t,x)is the payoff obtained by player i for the initial condition (t,x)).Setting p i=(V i)x and deriving the above system with respect to x one obtains the system of conservation laws:∂t p i+H i(x,p1,...,p n)x=0in R×(0,T).This system turns out to be,in general,ill-posed.Typically,in the case of two players(n= 2),the system is ill-posed if the terminal payoff of the players have an opposite monotonicity. If,on the contrary,these payoffs have the same monotony and are close to some linear payoff (which is a kind of cooperative case),then the above system has a unique solution,and one can build Nash equilibria in feedback form from the solution of the P.D.E[33].Still in space dimension1,the case of infinite horizon seems more promising:The sys-tem of P.D.E then reduces to an ordinary differential equation.The existence of suitable solutions for this equation then leads to Nash equilibria.Such a construction is carried out in Bressan and Priuli[32],Bressan[30,31]through several classes of examples and by various methods.In a similar spirit,the papers Cardaliaguet and Plaskacz[47],Cardaliaguet[42]study a very simple class of nonzero-sum differential games in dimension1and with a terminal payoff:In this case it is possible to select a unique Nash equilibrium payoff in feedback form by just imposing that it is Pareto whenever there is a unique Pareto one.However,this equilibrium payoff turns out to be highly unstable with respect to the terminal data.Some other examples of nonlinear-quadratic differential games are also analyzed in Olsder[99] and in Ramasubramanian[106].2.4Mean-field GamesSince the system of P.D.Es arising in nonzero-sum differential games is,in general,ill-posed,it is natural to investigate situations where the problem simplifies.It turns out that this is the case for differential games with a very large number of identical players.This problem has been recently developed in a series of papers by Lasry and Lions[87–90,94] under the terminology of mean-field games(see also Huang,Caines and Malhame[76–79] for a related approach).The main achievement of Lasry and Lions is the identification of the limit when the number of players tends to infinity.The typical resulting model takes the form⎧⎪⎨⎪⎩(i)−∂t u−Δu+H(x,m,Du)=0in R d×(0,T),(ii)∂t m−Δm−divD p H(x,m,Du)m=0in R d×(0,T),(iii)m(0)=m0,u(x,T)=Gx,m(T).(1)In the above system,thefirst equation has to be understood backward in time while the second one is forward in time.Thefirst equation(a Hamilton–Jacobi one)is associated with an optimal control problem and its solution can be regarded as the value function for a typical small player(in particular the Hamiltonian H=H(x,m,p)is convex with respect to the last variable).As for the second equation,it describes the evolution of the density m(t)of the population.More precisely,let usfirst consider the behavior of a typical player.He controls through his control(αs)the stochastic differential equationdX t=αt dt+√2B t(where(B t)is a standard Brownian motion)and he aims at minimizing the quantityET12LX s,m(s),αsds+GX T,m(T),where L is the Fenchel conjugate of H with respect to the p variable.Note that in this cost the evolving measure m(s)enters as a parameter.The value function of our average player is then given by(1-(i)).His optimal control is—at least heuristically—given in feedback form byα∗(x,t)=−D p H(x,m,Du).Now,if all agents argue in this way,their repartition will move with a velocity which is due,on the one hand,to the diffusion,and,one the other hand,to the drift term−D p H(x,m,Du).This leads to the Kolmogorov equation(1-(ii)).The mean-field game theory developed so far has been focused on two main issues:firstly,investigate equations of the form(1)and give an interpretation(in economics,for instance)of such systems.Secondly,analyze differential games with afinite but large num-ber of players and interpret(1)as their limiting behavior as the number of players goes to infinity.Up to now thefirst issue is well understood and well documented.The original works by Lasry and Lions give a certain number of conditions under which(1)has a solution,discuss its uniqueness and its stability.Several papers also study the numerical approximation of this solution:see Achdou and Capuzzo Dolcetta[1],Achdou,Camilli and Capuzzo Dolcetta[2], Gomes,Mohr and Souza[71],Lachapelle,Salomon and Turinici[85].The mean-field games theory has been used in the analysis of wireless communication systems in Huang,Caines and Malhamé[76],or Yin,Mehta,Meyn and Shanbhag[115].It seems also particularly adapted to modeling problems in economics:see Guéant[72,73],Lachapelle[84],Lasry, Lions,Guéant[91],and the references therein.As for the second part of the program,the limiting behavior of differential games when the number of players tend to infinity has been understood for ergodic differential games[88].The general case remains mostly open.3Long-time Average of Differential GamesAnother way to reduce the complexity of differential games is to look at their long-time be-havior.Among the numerous applications of this topic let us quote homogenization,singular perturbations and dimension reduction of multiscale systems.In order to explain the basic ideas,let us consider a two-player stochastic zero-sum dif-ferential game with dynamics given bydX t,ζ;u,vs =bX t,ζ;u,vs,u s,v sds+σX t,ζ;u,v,u s,v sdB s,s∈[t,+∞),X t=ζ,where B is a d-dimensional standard Brownian motion on a given probability space (Ω,F,P),b:R N×U×V→R N andσ:R N×U×V→R N×d,U and V being some metric compact sets.We assume that thefirst player,playing with u,aims at minimizing a running payoff :R N×U×V→R(while the second players,playing with v,maximizes). Then it is known that,under some Isaacs’assumption,the game has a value V T which is the viscosity solution of a second order Hamilton–Jacobi equation of the form−∂t V T(t,x)+Hx,D V T(t,x),D2V T(t,x)=0in[0,T]×R N,V T(T,x)=0in R N.A natural question is the behavior of V T as T→+∞.Actually,since V T is typically of linear growth,the natural quantity to consider is the long-time average,i.e.,lim T→+∞V T/T.Interesting phenomena can be observed under some compactness assumption on the un-derlying state-space.Let us assume,for instance,that the maps b(·,u,v),σ(·,u,v)and (·,u,v)are periodic in all space variables:this actually means that the game takes place in the torus R N/Z N.In this framework,the long-time average is well understood in two cases:either the dif-fusion is strongly nondegenerate:∃ν>0,(σσ∗)(x,u,v)≥νI N∀x,u,v,(where the inequality is understood in the sense of quadratic matrices);orσ≡0and H= H(x,ξ)is coercive:lim|ξ|→+∞H(x,ξ)=+∞uniformly with respect to x.(2) In both cases the quantity V T(x,0)/T uniformly converges to the unique constant¯c forwhich the problem¯c+Hx,Dχ(x),D2χ(x)=0in R Nhas a continuous,periodic solutionχ.In particular,the limit is independent of the initial condition.Such kind of results has been proved by Lions,Papanicoulaou and Varadhan[95] forfirst order equations(i.e.,deterministic differential games).For second order equations, the result has been obtained by Alvarez and Bardi in[3],where the authors combine funda-mental contributions of Evans[61,62]and of Arisawa and Lions[7](see also Alvarez and Bardi[4,5],Bettiol[24],Ghosh and Rao[70]).For deterministic differential games(i.e.,σ≡0),the coercivity condition(2)is not very natural:Indeed,it means that one of the players is much more powerful than the other one. However,very little is known without such a condition.Existing results rely on a specific structure of the game:see for instance Bardi[16],Cardaliaguet[46].The difficulty comes from the fact that,in these cases,the limit may depend upon the initial condition(see also Arisawa and Lions[7],Quincampoix and Renault[104]for related issues in a control set-ting).The existence of a limit for large time differential games is certainly one of the main challenges in differential games theory.4Existence of a Value for Zero-sum Differential Games with State Constraints Differential games with state constraints have been considered since the early theory of differential games:we refer to[23,28,66,69,80]for the computation of the solution for several examples of pursuit.We present here recent trends for obtaining the existence of a value for a rather general class of differential games with constraints.This question had been unsolved during a rather long period due to problems we discuss now.The main conceptual difficulty for considering such zero-sum games lies in the fact that players have to achieve their own goal and to satisfy the state constraint.Indeed,it is not clear to decide which players has to be penalized if the state constraint is violated.For this reason,we only consider a specific class of decoupled games where each player controls independently a part of the dynamics.A second mathematical difficulty comes from the fact that players have to use admissible controls i.e.,controls ensuring the trajectory to fulfilthe state constraint.A byproduct of this problem is the fact that starting from two close initial points it is not obvious tofind two close constrained trajectories.This also affects the regularity of value functions associated with admissible controls:The value functions are,in general,not Lipschitz continuous anymore and,consequently,classical viscosity solutions methods for Hamilton–Jacobi equations may fail.4.1Statement of the ProblemWe consider a differential game where thefirst player playing with u,controls afirst systemy (t)=gy(t),u(t),u(t)∈U,y(t0)=y0∈K U,(3) while the second player,playing with v,controls a second systemz (t)=hz(t),v(t),v(t)∈V,z(t0)=z0∈K V.(4)For every time t,thefirst player has to ensure the state constraint y(t)∈K U while the second player has to respect the state constraint z(t)∈K V for any t∈[t0,T].We denote by x(t)= x[t0,x0;u(·),v(·)](t)=(y[t0,y0;u(·)](t),z[t0,z0;v(·)](t))the solution of the systems(3) and(4)associated with an initial data(t0,x0):=(t0,y0,z0)and with a couple of controls (u(·),v(·)).In the following lines we summarize all the assumptions concerning with the vectorfields of the dynamics:⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩(i)U and V are compact subsets of somefinitedimensional spaces(ii)f:R n×U×V→R n is continuous andLipschitz continuous(with Lipschitz constant M)with respect to x∈R n(iii)uf(x,u,v)andvf(x,u,v)are convex for any x(iv)K U={y∈R l,φU(y)≤0}withφU∈C2(R l;R),∇φU(y)=0ifφU(y)=0(v)K V={z∈R m,φV(z)≤0}withφV∈C2(R m;R),∇φV(z)=0ifφV(z)=0(vi)∀y∈∂K U,∃u∈U such that ∇φU(y),g(y,u) <0(vii)∀z∈∂K V,∃v∈V such that ∇φV(z),h(z,v) <0(5)We need to introduce the notion of admissible controls:∀y0∈K U,∀z0∈K V and∀t0∈[0,T]we defineU(t0,y0):=u(·):[t0,+∞)→U measurable|y[t0,y0;u(·)](t)∈K U∀t≥t0V(t0,z0):=v(·):[t0,+∞)→V measurable|z[t0,z0;v(·)](t)∈K V∀t≥t0.Under assumptions(5),the Viability Theorem(see[9,10])ensures that for all x0= (y0,z0)∈K U×K VU(t0,y0)=∅and V(t0,z0)=∅.Throughout the paper we omit t0in the notations U(t0,y0)and U(t0,y0)whenever t0=0.We now describe two quantitative differential games.Let us start with a game with an integral cost:Bolza Type Differential Game Given a running cost L:[0,T]×R N×U×V→R and afinal costΨ:R N→R,we define the payoff associated to an initial position(t0,x0)= (t0,y0,z0)and to a pair of controls(u,v)∈U(t0,y0)×V(t0,z0)byJt0,x0;u(·),v(·)=Tt0Lt,x(t),u(·),v(·)dt+Ψx(T),(6)where x(t)=x[t0,x0;u(·),v(·)](t)=(y[t0,y0;u(·)](t),z[t0,z0;v(·)](t))denotes the solu-tion of the systems(3)and(4).Thefirst player wants to maximize the functional J,while the second player’s goal is to minimize J.Definition1A mapα:V(t0,z0)→U(t0,y0)is a nonanticipating strategy(for thefirst player and for the point(t0,x0):=(t0,y0,z0)∈R+×K U×K V)if,for anyτ>0,for all controls v1(·)and v2(·)belonging to V(t0,z0),which coincide a.e.on[t0,t0+τ],α(v1(·)) andα(v2(·))coincide almost everywhere on[t0,t0+τ].Nonanticipating strategiesβfor the second player are symmetrically defined.For any point x0∈K U×K V and∀t0∈[0,T]we denote by A(t0,x0)and by B(t0,x0)the sets of the nonanticipating strategies for thefirst and the second player respectively.We are now ready to define the value functions of the game.The lower value V−is defined by:V−(t0,x0):=infβ∈B(t0,x0)supu(·)∈U(t0,y0)Jt0,x0;u(·),βu(·),(7)where J is defined by(6).On the other hand we define the upper value function as follows:V+(t0,x0):=limε→0+supα∈A(t0,x0)infv(·)∈V(t0,z0)Jεt0,x0;αv(·),v(·)(8)withJεt0,x0;u(·),v(·):=Tt0Lt,x(t),u(t),v(t)dt+Ψεx(T),where x(t)=x[t0,x0;u(·),v(·)](t)andΨεis the lower semicontinuous function defined byΨε(x):=infρ∈R|∃y∈R n with(y,ρ)−x,Ψ(x)=ε.The asymmetry between the definition of the value functions is due to the fact that one assumes that the terminal payoffΨis lower semicontinuous.WhenΨis continuous,one can check that V+can equivalently be defined in a more natural way asV+(t0,x0):=supα∈A(t0,x0)infv(·)∈V(t0,z0)Jt0,x0;αv(·),v(·).We now describe the second differential game which is a pursuit game with closed target C⊂K U×K V.Pursuit Type Differential Game The hitting time of C for a trajectory x(·):=(y(·),z(·)) is:θCx(·):=inft≥0|x(t)∈C.If x(t)/∈C for every t≥0,then we setθC(x(·)):=+∞.In the pursuit game,thefirst player wants to maximizeθC while the second player wants to minimize it.The value functions aredefined as follows:The lower optimal hitting-time function is the mapϑ−C :K U×K V→R+∪{+∞}defined,for any x0:=(y0,z0),byϑ−C (x0):=infβ(·)∈B(x0)supu(·)∈U(y0)θCxx0,u(·),βu(·).The upper optimal hitting-time function is the mapϑ+C :K U×K V→R+∪{+∞}de-fined,for any x0:=(y0,z0),byϑ+ C (x0):=limε→0+supα(·)∈A(x0)infv(·)∈V(z0)θC+εBxx0,αv(·),v(·).By convention,we setϑ−C (x)=ϑ+C(x)=0on C.Remarks–Note that here again the definition of the upper and lower value functions are not sym-metric:this is related to the fact that the target assumed to be closed,so that the game is intrinsically asymmetric.–The typical pursuit game is the case when the target coincides with the diagonal:C= {(y,z),|y=z}.We refer the reader to[6,29]for various types of pursuit games.The formalism of the present survey is adapted from[50].4.2Main ResultThe main difficulty for the analysis of state-constraint problems lies in the fact that two trajectories of a control system starting from two—close—different initial conditions could be estimated by classical arguments on the continuity of theflow of the differential equation. For constrained systems,it is easy to imagine cases where the constrained trajectories starting from two close initial conditions are rather far from each other.So,an important problem in order to get suitable estimates on constrained trajectories,is to obtain a kind of Filippov Theorem with ly a result which allows one to approach—in a suitable sense—a given trajectory of the dynamics by a constrained trajectory.Note that similar results exist in the literature.However,we need here to construct a constrained trajectory in a nonanticipating way[26](cf.also[25]),which is not the case in the previous constructions.Proposition1Assume that conditions(5)are satisfied.For any R>0there exist C0= C0(R)>0such that for any initial time t0∈[0,T],for any y0,y1∈K U with|y0|,|y1|≤R,。
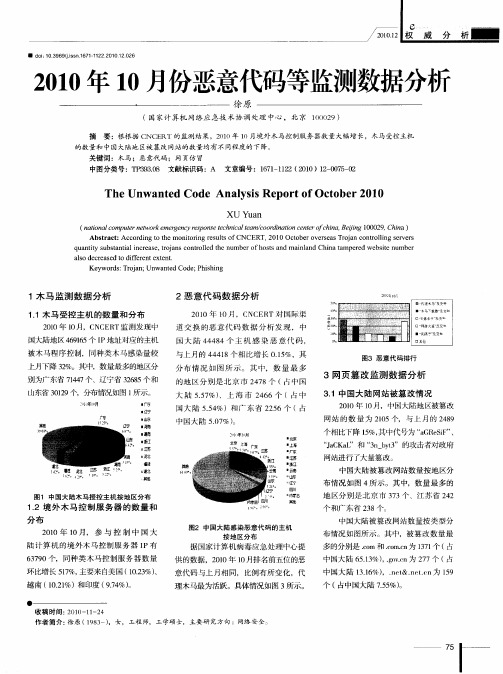
2010年10月份恶意代码等监测数据分析
0i苏 I
●浙讧 云南 山孽 辽宁 四J I l
网站进 行 了大量 篡 改 。 中国 大 陆 被 篡 改 网 站 数 量 按 地 区分 布 情 况 如 图 4所 示 。 其 中,数 量 最 多 的 地 区分 别 是 北 京 市 3 3个 、江 苏 省 2 2 7 4 个 和 广 东省 2 8个。 3
分 布 情 况 如 图 所 示 。 其 巾, 数 量 最 多 的地 区分别是 北 京市 2 7 4 8个 (占中 国 大 陆 55 % ) 上 海 市 2 6 .7 、 4 6个 (占 中 国 大 陆 55 %)和 广 东 省 2 5 .4 2 6个 (占 中 国 大 陆 50 % o .7
图2 中 国 大 陆感 染恶 意 代 码 的 主机 按 地 区 分 布
中国大 陆 被 篡 改 网站 数 量 按 类 型 分
布情况如图所示 。其 中,被篡改数量最
多 的分别 是 . r和 . rc 为 17 个 ( cn o cn n 3 1 o. 占 中 国大 陆 6 . %) . v n 2 7 ( 51 ,g . 为 7 个 占 3 oc 中 国 大 陆 1. %) n t n t n为 19 31 ,.e&.e. 6 c 5
as e ra e od fe e te e t lod ce s od : r a ; n a t o e P i ig e w rs To n U w ne C d ; hs n j d h
1木马监测数据分析
11木 马 受 控 主 机 的 数 量 和 分 布 .
2 1 年 1 月份恶意代码等监测数据分析 00 0
徐 原
(国家计 算机 网络应 急技 术协调 处理 中心 ,北京 1 0 2 0 0 9)
CEI-28G-VSR Project Initial Thought OIF2010.092.03

Manual Tuning of Tx?
10G SFP+ issues in an un-retimed Tx module interface
• • • •
Currently host Tx de-emphasis filter settings needs to be manually tuned Stacked SFP+ connectors requires a different preemphasis optimization Different channel lengths require different optimization Cannot accommodate manufacturing and temperature variations
* Preliminary
Next Gen 100G SMF Optical Module Power Dissipation
40
2.0 W/in2 isotherm CFP 40/100G 300-pin 40G 5” x 7” These lines approximate “Isotherms” The position of these lines are a result of: • Ambient Temperatures • Heatsink Efficiency / Size • Module Case Temperature Suggested power consumption and module area ranges of next gen CFP2 and QSFP2 pluggable form factors based on CFP and QSFP isotherms
面向弱监督多标签数据的特征选择方法
介绍网球英语作文
Tennis is a popular sport that originated in the late19th century in England.It is played by millions of people around the world,both professionally and recreationally. The sport involves two players singles or four players doubles hitting a tennis ball back and forth over a net using a racket.Basics of Tennis:The objective of the game is to hit the ball in such a way that the opponent is unable to return it.Points are scored when the opponent fails to return the ball before it bounces twice or lands outside the designated court boundaries.Tennis Court:A standard tennis court is78feet long and36feet wide for singles matches,and27feet wide for doubles matches.The court is divided into two halves by a net,and each half is further divided into a service box and a backcourt.Scoring System:Tennis uses a unique scoring system known as love,15,30,and40.The first point is15, the second30,and the third40.If both players reach40,its called a deuce.A player must win by two points to secure a game.Tennis Equipment:The essential equipment for tennis includes a tennis racket and tennis balls.Rackets come in various sizes and weights,and the choice often depends on the players strength and playing style.Tennis balls are usually made of a rubber core covered with a felt exterior.Types of Tennis Strokes:Players use a variety of strokes to hit the ball,including the serve,forehand,backhand, volley,and smash.Each stroke has its own technique and is used in different game situations.Serve:The act of starting a point by hitting the ball into the diagonal service box. Forehand:A stroke played with the palm of the hand facing the direction of the swing. Backhand:A stroke played with the back of the hand facing the direction of the swing. Volley:Hitting the ball in the air before it bounces.Smash:A powerful overhead shot,usually hit on the rise.Tennis Grand Slams:The most prestigious tennis tournaments are the Grand Slam events,which include the Australian Open,French Open,Wimbledon,and the US Open.Winning all four in a single calendar year is known as a Grand Slam.Tennis Etiquette:Tennis has a set of unwritten rules that players are expected to follow,such as waiting for a break in play to ask for a ball,not walking in front of a player who is about to serve, and not hitting the ball out of turn.Health Benefits:Playing tennis offers numerous health benefits,including improved cardiovascular health, increased muscle strength,and enhanced coordination.It is also a social sport that can help reduce stress and improve mental wellbeing.Conclusion:Tennis is a sport that combines physical prowess with strategic thinking.It is enjoyed by people of all ages and skill levels,offering a great way to stay active and engaged in a competitive yet fun environment.Whether youre a beginner looking to learn the basics or an experienced player seeking to refine your skills,tennis has something to offer everyone.。
多线程技术在数据库编程中的应用
多线程技术在数据库编程中的应用
毕伟
【期刊名称】《职业技术》
【年(卷),期】2008(000)004
【摘要】本文介绍了线程和多线程程序设计的概念和基本思想,最后用优化编排的实例,说明了多线程程序设计的方法
【总页数】1页(P82)
【作者】毕伟
【作者单位】大庆油田有限公司第三采油厂第三油矿地质工艺队
【正文语种】中文
【中图分类】TP311.1
【相关文献】
1.多线程技术在数据库编程中的应用 [J], 毕伟
2.ADO数据库编程在地铁车站监控系统中的应用研究 [J], 曹成;徐骏善
3.工程软件中VB数据库编程技术的应用及选择思路解析 [J], 尤晶晶
4.高压变频器监控软件中ADO数据库编程技术的应用 [J], 张凌;金新民
5.Visual C^(++)数据库编程在矿山系统中的应用 [J], 孔凡敏;毛继国;盛承光因版权原因,仅展示原文概要,查看原文内容请购买。
一种QoS动态通信量疏导模式

一种QoS动态通信量疏导模式
王兴伟;佟呈呈;黄敏
【期刊名称】《东北大学学报(自然科学版)》
【年(卷),期】2009(030)006
【摘要】考虑用户通信量请求的服务质量QoS(Quality of Service)约束和网络资源约束,提出了一种光Internet中的QoS动态通信量疏导模式.该模式以最小化网络费用为目标,基于分层图模型和Dijkstra第k最短路算法,引入亲和度,尽可能把新到达的通信量请求疏导到能满足其带宽和延迟要求的已有光路上.仿真结果表明,本文提出的模式是可行和有效的,不仅支持QoS,而且提高光路利用率,有实用性.【总页数】3页(P802-804)
【作者】王兴伟;佟呈呈;黄敏
【作者单位】东北大学,信息科学与工程学院,辽宁,沈阳,110004;东北大学,信息科学与工程学院,辽宁,沈阳,110004;东北大学,信息科学与工程学院,辽宁,沈阳,110004【正文语种】中文
【中图分类】TP393
【相关文献】
1.一种基于博弈论的智能QoS静态通信量疏导模式 [J], 王兴伟;赵志杰;黄敏
2.IP/DWDM光Internet中通信量动态疏导算法 [J], 刘振宇;陈明华
3.基于捕食搜索和博弈的静态通信量疏导模式 [J], 王兴伟;王庆军;赖武文;黄敏
4.延迟与带宽受限智能静态通信量疏导模式 [J], 王兴伟;佟呈呈;黄敏
5.一种基于用户在线行为分析的Web服务动态QoS评估方法 [J], 王瑞祥;魏乐;常钰;段燕飞
因版权原因,仅展示原文概要,查看原文内容请购买。
基于深度学习的软件定义网络应用策略冲突检测方法
基于深度学习的软件定义网络应用策略冲突检测方法李传煌;程成;袁小雍;岑利杰;王伟明【摘要】在基于OpenFlow的软件定义网络(SDN)中,应用被部署时,相应的流表策略将被下发到OpenFlow交换机中,不同应用的流表项之间如果产生冲突,将会影响交换机的实际转发行为,进而扰乱特定应用的正确部署以及SDN的安全.随着SDN 规模的扩大以及需要部署应用的数量的剧增,交换机中的流表数量呈现爆炸式增长.此时若采用传统的流表冲突检测算法,交换机将会耗费大量的系统计算时间.结合深度学习,首次提出了一种适合SDN中超大规模应用部署的智能流表冲突检测方法.实验结果表明,第一级深度学习模型的AUC达到97.04%,第二级模型的AUC达到99.97%,同时冲突检测时间与流表规模呈现线性增长关系.%In OpenFlow-based SDN(software defined network),applications can be deployed through dispatching the flow polices to the switches by the application orchestrator or controller.Policy conflict between multiple applications will affect the actual forwarding behavior and the security of the SDN.With the expansion of network scale of SDN and the increasement of application number,the number of flow entries will increase explosively.In this case,traditional algorithms of conflict detection will consume huge system resources in computing.An intelligent conflict detection approach based on deep learning was proposed which proved to be efficient in flow entries' conflict detection.The experimental results show that the AUC (area under the curve) of the first level deep learning model can reach 97.04%,and the AUC of the second level model can reach 99.97%.Meanwhile,the time ofconflict detection and the scale of the flow table have a linear growth relationship.【期刊名称】《电信科学》【年(卷),期】2017(033)011【总页数】10页(P27-36)【关键词】流表冲突检测;深度学习;异常检测;软件定义网络;OpenFlow【作者】李传煌;程成;袁小雍;岑利杰;王伟明【作者单位】浙江工商大学信息与电子工程学院,浙江杭州310018;浙江工商大学信息与电子工程学院,浙江杭州310018;美国佛罗里达大学大规模智能系统实验室,美国佛罗里达州盖恩斯维尔32611;浙江工商大学信息与电子工程学院,浙江杭州310018;浙江工商大学信息与电子工程学院,浙江杭州310018【正文语种】中文【中图分类】TP393随着互联网业务和服务需求的不断增长,云计算网络、大型数据中心网络等已经成为承载各种大型计算和存储业务的重要网络基础设施,现有网络架构已经不能有效地满足这些新型网络平台的需求。
折扣加权总完工时间的调整时间可分离无等待Flow Shop排序问题
折扣加权总完工时间的调整时间可分离无等待Flow Shop排
序问题
王吉波;夏尊铨
【期刊名称】《系统工程》
【年(卷),期】2003(21)3
【摘要】研究 3台机器调整时间可分离的无等待 Flow Shop排序问题 ,目标函数为极小化折扣加权总完工时间。
对某些特殊情况 ,给出问题存在多项式最优算法的充分条件。
在此条件下得到求解调整时间可分离的无等待 Flow Shop排序问题的分派规则。
【总页数】4页(P91-94)
【关键词】F1owShop排序问题;目标函数;调整时间;折扣加权总完工时间;多项式最优算法
【作者】王吉波;夏尊铨
【作者单位】大连理工大学应用数学系
【正文语种】中文
【中图分类】O223
【相关文献】
1.调整时间可分离的无等待Flow Shop调度问题 [J], 赵传立;张庆灵;唐恒永
2.一类带折扣加权总完工时间单机排序问题 [J], 孙笑微;赵大宇
3.一类调整时间可分离的Flow Shop排序问题F3|s|Cmax的最优算法 [J],
4.折扣加权总完工时间问题的半在线排序算法 [J], 陶冶;陶继平;巢志骏;席裕庚
5.平行机上单位加工时间加权总完工时间排序问题的反问题 [J], Hongtruong Pham; 鲁习文
因版权原因,仅展示原文概要,查看原文内容请购买。
利用动态裁剪差分隐私实现联邦学习入侵检测

利用动态裁剪差分隐私实现联邦学习入侵检测
张晓龙;罗文华
【期刊名称】《小型微型计算机系统》
【年(卷),期】2024(45)6
【摘要】网络入侵检测任务中应用联邦学习技术可以在参与方数据本地化的同时扩充标签数据数量,以此得到性能更优的检测模型.然而,联邦学习训练过程通常涉及服务器与参与方之间的多次交互,而在交互过程中,参与方上传的参数容易受到攻击者的恶意窃取,造成数据隐私泄漏.针对此问题,提出了一种基于动态梯度裁剪的差分隐私保护方法 DCDP,DCDP选取训练过程中梯度的L2范数分位数作为裁剪阈值,之后通过参数噪声传递实现参与方数据隐私保护,保证了噪声添加合理性,从而避免手动设置阈值造成的性能受损.改进联邦平均算法FedAvg,添加Macro-F1指标进行加权聚合,得到新的网络入侵检测算法DCDP-FedF1.通过在CICIDS2017数据集上进行对比实验,证明了DCDP-FedF1的有效性和先进性.
【总页数】8页(P1474-1481)
【作者】张晓龙;罗文华
【作者单位】中国刑事警察学院公安信息技术与情报学院
【正文语种】中文
【中图分类】TP393
【相关文献】
1.基于差分隐私的联邦学习数据隐私安全技术
2.面向联邦学习的学习率裁剪梯度优化隐私保护方案
3.动态梯度阈值裁剪的差分隐私生成对抗网络算法
4.基于本地差分隐私的联邦学习隐私保护方法
5.基于差分隐私的分段裁剪联邦学习算法
因版权原因,仅展示原文概要,查看原文内容请购买。
统计优先级多址接入协议的改进与仿真
统计优先级多址接入协议的改进与仿真
吴皓威;吕顺兴;张扬;欧静兰
【期刊名称】《电讯技术》
【年(卷),期】2022(62)10
【摘要】统计优先级的多址接入(Statistical Priority-based Multiple Access,SPMA)协议的优良性能符合未来数据链的发展趋势。
经典的SPMA协议中存在固定门限设置导致的吞吐量下降、退避时间设置过于简单和低优先级分组“饥饿”等三个问题。
针对这些问题,提出了统计差值退避算法和虚拟时间戳排队算法。
统计差值退避算法使用负载统计量和优先级门限的差值,计算出合理的分组退避时间。
虚拟时间戳排队算法根据接入带宽的最低要求,按照虚拟完成时间大小进行分组接入。
结合这两个算法,设计了基于SPMA的介质访问控制层改进协议,并使用OPNET软件对改进协议进行了仿真。
仿真结果表明,相比于SPMA协议的传统算法,改进协议的系统吞吐量更大且更稳定,优先级平均时延更低,同时保证了低优先级业务的最小带宽接入需求。
【总页数】7页(P1438-1444)
【作者】吴皓威;吕顺兴;张扬;欧静兰
【作者单位】重庆大学微电子与通信工程学院;重庆大学通信与测控中心;空天地网络互连与信息融合重庆市重点实验室
【正文语种】中文
【中图分类】TN915
【相关文献】
1.基于动态优先级队列的无线多址接入协议
2.星上抽样侦听统计自适应多址接入协议
3.一种数据链动态门限统计优先级多址接入协议
4.一种数据链动态门限统计优先级多址接入协议
5.基于现场可编程逻辑门阵列的多优先级改进型载波感知多址协议在Ad Hoc网络中的实现和性能
因版权原因,仅展示原文概要,查看原文内容请购买。
一个新的基于分段常数水平集方法的多相位图像分割模型
一个新的基于分段常数水平集方法的多相位图像分割模型冷英华;黄炳家
【期刊名称】《网络新媒体技术》
【年(卷),期】2008(029)005
【摘要】在Mumford-Shah模型和Yoon Mo Jung等提出的分割模型的基础上,利用分段常数水平集方法,提出了一个新的多相位分割模型.新模型输出一个多相位的分布图象,并可以容易地提取每个单独的相位,有一定的抗噪音能力.利用最速下降算法求解总变差最小化问题.引进了一个函数确定模型中的参数值,加速了算法的收敛速度.数值试验表明新模型有很好的分割效果且能准确地处理含T-交汇的图象.【总页数】5页(P4-8)
【作者】冷英华;黄炳家
【作者单位】中国石油大学(华东)数学与计算科学学院,东营,257061;中国石油大学(华东)数学与计算科学学院,东营,257061
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于模糊聚类和C-V模型的水平集方法图像分割 [J], 单建丰;郁道银;陈晓冬;汪毅
2.一种新的基于水平集方法的SAR图像分割算法 [J], 刘光明;孟祥伟;陈振林
3.隐式曲面多相图像分割的变分水平集方法 [J], 王琦;潘振宽;魏伟波
4.多相图像分割的多尺度变分水平集方法研究 [J], 方江雄;刘花香;刘军;张怀强
5.基于C-V模型的水平集方法在脑CT图像分割中的应用 [J], 宁祎;杜宽森;闫铭因版权原因,仅展示原文概要,查看原文内容请购买。
优化Gabor小波权重的EBGM算法
优化Gabor小波权重的EBGM算法
刘晓东;孙军;周军
【期刊名称】《信息技术》
【年(卷),期】2009(033)001
【摘要】在EBGM算法中,计算人脸特征点的相似度时,认为每个Gabor小波系数对结果的影响是相同的,从而给予所有系数同等权重,但实验测试表明情况并非如此.充分挖掘了人脸的统计特性,通过对不同特征点在频域分布特征的提取,提出一种对Gabor小波系数进行分类并赋予其不同权重的优化方法.实验测试证明,该算法能有效地提高识别率.
【总页数】4页(P59-62)
【作者】刘晓东;孙军;周军
【作者单位】上海交通大学图像通信与信息处理研究所,上海,200240;上海交通大学上海市数字媒体处理与传输重点实验室,上海,200240;上海交通大学图像通信与信息处理研究所,上海,200240;上海交通大学上海市数字媒体处理与传输重点实验室,上海,200240;上海交通大学图像通信与信息处理研究所,上海,200240;上海交通大学上海市数字媒体处理与传输重点实验室,上海,200240
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.Gabor小波优化HMM算法的眼部疲劳状态识别 [J], 杨秋芬;桂卫华;胡豁生;阳若宁
2.改进的Gabor小波变换特征提取算法 [J], 刘胜昔; 程春玲
3.Gabor小波算法在车辆追踪系统中的研究应用 [J], 谢晓旦
4.基于门禁系统的人脸识别算法——Gabor小波变换 [J], 张宣妮;马秀霞;鲁方莹;刘章;高歌;张耀武;陈鹏博
5.融合FLBP和Gabor小波的图像轮廓提取算法 [J], 周华平;张晓宇;姚尚军;丁金虎
因版权原因,仅展示原文概要,查看原文内容请购买。
软件过程改进及其模型
软件过程改进及其模型
刘丽;卢俊
【期刊名称】《电脑开发与应用》
【年(卷),期】2003(016)012
【摘要】系统地阐述了CMM/TSP/PSP模型的内容,目的是进一步认识理解CMM/TSP/PSP,并将三者有机地结合起来,有效地达到软件过程持续改进的结果,形成一套更先进、更科学、更新的管理模式.
【总页数】2页(P42-43)
【作者】刘丽;卢俊
【作者单位】北方自动控制技术研究所,太原,030006;73861部队,鹰潭,335000【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于CMM IDEAL模型的中小型企业软件过程改进的方法探究 [J], 刘平
2.面向项目绩效评价的软件过程改进模型与决策支持研究 [J], 张金隆;于本海
3.基于小型软件企业的软件过程改进模型的研究 [J], 王志和;袁辉勇;王新辉
4.软件过程改进的CMM模型 [J], 冯平鸽;杨民献
5.基于GQM的软件过程改进度量模型的研究 [J], 徐俊;罗军;韩坚华;汪双兔
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ITALY FRANCE SPAIN
1000 Hl
24 000 22 000 20 000 18 000 16 000 14 000 12 000 10 000 8 000 6 000 4 000 2 000
USA ARGENTINA CHINA AUSTRALIA SOUTH AFRICA CHILE RUSSIAN FED PORTUGAL GERMANY
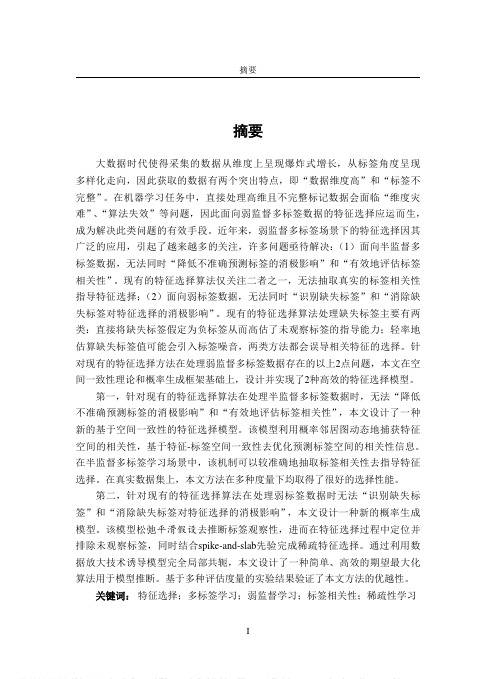
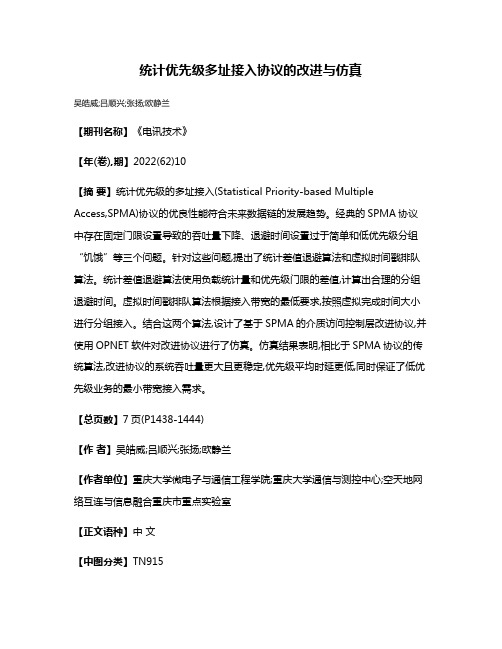
Nb:This spread can not be considered as a surplus because near 35 million hl are used to supply the market for industrial purposes: brandies, carburation, vinegars and vermouth.
Forecast 2010
16 14
14,2 12,5 9,3
Forecast 2010 / 2005 decreasing increasing
1 000 000 Hl
12 10 8 6 4 2 0
5,5
4,5 3,5
3,3 3,0 2,9 2,0 2,0 1,9 1,7 1,6
29
OIV 2011
7,8 7,3 4,1 3,9 3,8 2,7 2,6
5,00
1,4 1,0
0,00
26
OIV 2011
World wine imports
3,0% 1,3%
10,8% 2,6% 0,9% 2,8% 82,9%
17,7% 7,6% 70,4%
95 85 75 65 55 45 35
1 000 000 Hl
Imported wines from 87 reported countries (~97% of wines world imports)
90000 80000 70000 60000 38,0% 40,0% all wines (2204 bottled & bulk) all bulk wines (220429) % bulk
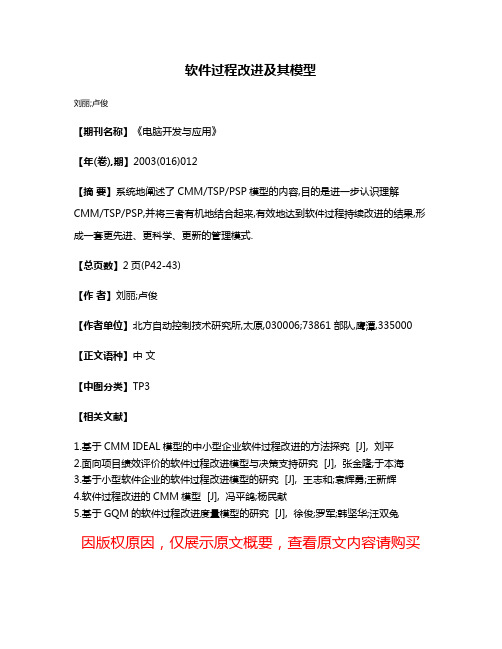
ITALY SPAIN FRANCE AUSTRALIA CHILE
1000 Hl
5 000 4 500 4 000 3 500 3 000 2 500 2 000 1 500 1 000 500 0
USA GERMANY SOUTH AFRICA ARGENTINA PORTUGAL NEW ZEALAND MOLDAVIA
19,6 16,3 13,0 11,2 9,2 8,8 8,2 7,2 6,8
increasing
14
OIV 2011
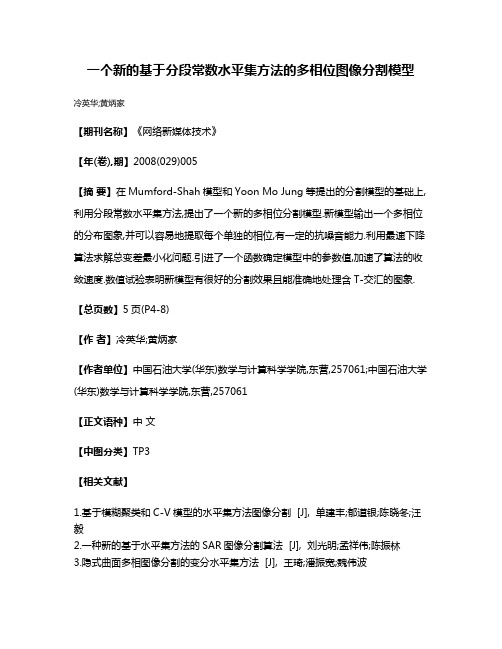
Global wine consumption
15
OIV 2011
World consumption of wine
2,9% 2,7%
19,4% 2,6% 1,6% 4,2% 72,1%
1000 ha
5
OIV 2011
Surface area of vineyards worldwide
Areas planted in vines of the 12 leading countries
Forecast 2010
Forecast 2010 / 2005 decreasing 1000 ha increasing
20
OIV 2011
Degree of market equilibrium in the world of wine
Difference between wine production and consumption
70000 60000
1 000 000 Hl
50000 40000 30000 20000 10000 0
60 50 40
28,2
30 20 10 0
23,6 18,8 18,8 16,5 15,8 15,3 13,0
9,5 9,3
10
OIV 2011
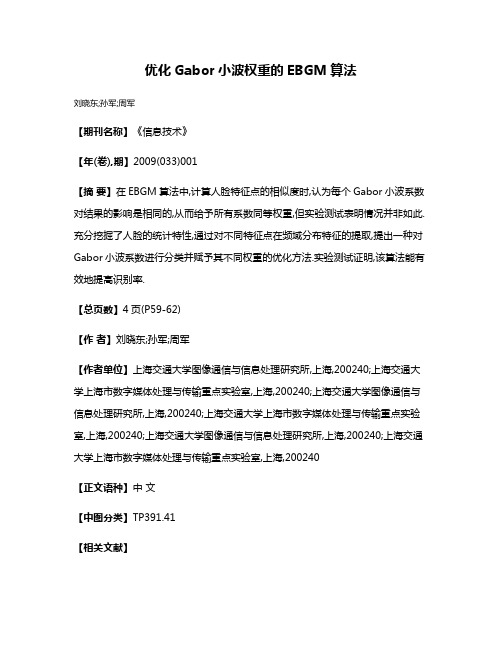
Global wine production
11
OIV 2011
World production of wine
3,8% 2,2% 17,5% 3,5% 73,1%
Global grapes production of the 16 leading countries
Forecast 2010
80 70
75,0 62,2 61,5 58,5 56,4 42,6
Forecast 2010 / 2005 decreasing increasing
1 000 000 qs
21,6%
64,9%
7,9%
255 250 245 240 235 230 225 220 215 210 205
1 000 000 Hl
238
16
OIV 2011
Developments of the leading consumption of wine
35000 33000 31000 29000 27000 25000 23000 21000 19000
2
OIV 2011
Surface area of vineyards worldwide
3
OIV 2011
Surface area of vineyards worldwide
1000 ha
7586
4
OIV 2011
Recent developments of the leading vineyards
13
OIV 2011
Production of wine of the 12 leading countries
Forecast 2010
50 45 40 35 30 25 20 15 10 5 0
45,3
48,65 decreasing
1 000 000 Hl
Consumption of wine of the 12 leading countries
Forecast 2010
30 25
20,2 29,4 27,1 24,5
Prov. 2010 / 2005 decreasing
20
1 000 000 Hl
15 10
14,3 13,2 10,9 10,0 9,7 5,3
ITALY USA CHINA FRANCE SPAIN TURKEY
1 000 qs
33 000 28 000 23 000 18 000 13 000 8 000
CHILE ARGENTINA INDIA IRAN SOUTH AFRICA AUSTRALIA PORTUGAL
9
OIV 2011
644 905
8
OIV 2011
Recent developments of the leading grapes producers
90 000 85 000 80 000 75 000 70 000 65 000 60 000 55 000 50 000 45 000 40 000 35 000 30 000
6
OIV 2011
Global grape production
7
OIV 2011
Global grape production
20,4%
4,8% 1,5% 54,3%
6,5% 21,1%
2,8% 43,9%
19,0%
25,7%
700 000 650 000
1000 qs
600 000 550 000 500 000 450 000 400 000
4,2% 15,5%
9,9% 70,0%
0,5%
1 000 000 Hl
95 85 75 65 55 45 35
93,5
24
OIV 2011
Developments of the leading of wine exports
22 000 20 000 18 000 16 000 14 000 12 000 10 000 8 000 6 000 4 000 2 000
1000 hl
50000 40000 30000 20000 10000 0 2001 2002 2003 2004 2005 2006 2007 2008
36,0%
34,0%
32,0%
30,0% Source : UNC & OIV (PA)
Caution: 220429 (bulk wines) includes a possible raising part of BIB
FRANCE USA ITALY GERMANY
1000 Hl
16000 14000 12000 10000 8000 6000 4000 2000 0
CHINA UK SPAIN RUSSIAN FED ARGENTINA AUSTRALIA PORTUGAL CANADA
17
OIV 2011
1
OIV 2011
OIV report on the State of the vitiviniculture world market
•Surface area of world vineyards • Grapes
• Global production
• Wine
• Global wine production • Global wine consumption • Degree of market equilibrium in the world of wine • International trade