FY-20A惯性姿态平衡仪说明书_中文_
2018-2019-平衡机说明书-精选word文档 (15页)
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==平衡机说明书篇一:动平衡机说明书动平衡机使用说明图8 说明1.START 键--开始测量如果代码 C13设置 1, 合上轮罩测量开始 , 〈看 10 章改变操作模式〉如果在测量完毕轮罩打开的情况下按动START 键, 而定位制动处于工作状态时,这时车轮罩打开的情况下车轮也可转动, 要确保车轮转动不会被工具或其他类似的物件所妨碍。
--车轮最多转动半圈就被制动, 从而左侧校正面的平衡块能够安放在主轴的正上方。
2.STOP- 键(1)中断测量(2)清除错误代码(3)如果输入完操作模式后,用STOP键 , 新的状态被自动地删除 ,以前的状态被重新建立图 9 键盘详细使用说明1.OP 键开始说明初步化运行2.精确键,--高分辩度显示总读数1克代替5克或OZ替代(需把精确键按下 )(1)显示最小不平衡极限值以下的残余不平衡量 : 只要按下此键 .实际不平衡值即可显示(2)标准平衡模式下显示不平衡值如果平衡模式Alu1到ALU5 被选择,按下精确键 , 然后按下功能键设定平衡模式。
(3)OP 和 UN 程序中精确键作为转换键使用3.C健(1)轻轻地按下此键 , 转换不平衡读数的主量单位〈克或盎司〉,用 C3 活动代号设置开机时单位。
(2)长时间按下此键 , 转换操作模式4. 轮胎类型功能键持续按下这个键旋转车轮 , 即可选择所需轮胎类型 ,松下此键输入值即被存储。
5. 平衡模式功能键持续按下这个键 ,旋转车轮 ,即可选择所需平衡模式,松开此键,存储输入值。
6. 动静态不平衡显示功能键7. 轮圈宽度 , 直径等功能键图 10 显示板,方向显示,提示操作者1). 左侧较正面的指示器2). 左、右校正面的 OK 指示器3). OP 记号--需要执行最优化运行4). 轮圈符号和上装平衡块的位置5). 右侧较正面的方向指示器6). 轮圈直径符号7). 距离机器的附号(左侧校正面)8). 右侧校正面的数字显示 ( 二位数)--轮圈直径--轮圈 / 机器距离 ( 常用mm)--右侧校正而不平衡值--调整和操作极限值模式的状态9).START 键符号当运行使用START时 START 会显示10). 补偿运行完之后符号11). 轮圈宽度符号l2). 左侧校正面的数字显示屏显示;轮圈宽度右侧校正面不平衡值静态不平衡值错误代码C 代码简单语言的平衡模式篇二:中文全自动平衡机说明书目录1、平衡机综述1.1 概述??????????????????????????????????11.2 技术参数????????????????????????????????11.3 操作者注意事项?????????????????????????????11.4 标准安全设施停止按键??????????????????????????22.平衡机安装????????????????????????????????22.1 机械安装????????????????????????????????22.2 电气连接????????????????????????????????2 3 面板含义?????????????????????????????????33.1 显示面板含义??????????????????????????????33.2 控制面板含义??????????????????????????????33.3 功能转换组合键?????????????????????????????44.安装轮胎?????????????????????????????????44.1 安装主轴丝杆??????????????????????????????44.2 安装轮胎????????????????????????????????4 5 轮辋数据输入方法?????????????????????????????45.1 自动测量输入轮辋数据??????????????????????????45.2 手动测量输入轮辋数据??????????????????????????55.3 加装延伸杆的轮辋数据输入????????????????????????65.4 ALU-S平衡方式尺寸输入法????????????????????????7 6 平衡机校准程序??????????????????????????????76.1 平衡机自校准程序????????????????????????????76.2 自动测量尺校准程序???????????????????????????86.4 系统自检程序??????????????????????????????8 7 车轮平衡操作???????????????????????????????97.1 小汽车及中小型卡车轮胎的平衡??????????????????????97.2 重新计算不平衡值????????????????????????????107.3 实际不平衡值显示????????????????????????????107.4 静态一动态平衡方式???????????????????????????107.5 特殊形状轮辋平衡(ALU-S平衡方式)????????????????????117.6 不平衡的分解??????????????????????????????12 8不平衡最佳化处理功能??????????????????????????13 9 故障排除?????????????????????????????????14 10 日常维修????????????????????????????????14 10.1调整皮带张力??????????????????????????????14 10.2更换保险丝???????????????????????????????14 10.3平衡显示不稳定?????????????????????????????14 11维修操作????????????????????????????????14 11.1推荐备件????????????????????????????????14 11.2检查距离测量尺?????????????????????????????15 11.3检查位置传感器?????????????????????????????15 11.4 安装压力传感器于合适位置????????????????????????15 11.5 轮胎测量和校准平衡。
FY系列动平衡机产品说明书
FY系列动平衡机产品说明书FY系列数显动平衡机使用说明书浙江省温岭市先导电机技术研究所电话: 86144065E-mail:地址:浙江省温岭市经济开发区二期( 楼山)目录1、概述2、主要技术性能3、基本结构4、基本工作原理5、安装与调试6、操作与使用7、平衡转速与平衡精度8、维护保养及故障排除9、附图一、概述FY型系列动平衡机产品, 可用于中小型电机转子、转轴、转盘、汽车机械, 电动工具等旋转零件, 在电机、轻工、纺织等部门得到广泛运用。
FY型系列动平衡机采用数码显示, 电气测量部分采用CMOS数字集成电路, 该系列产品结构简单、性能稳定、灵敏度高、指示直观、通用性强等优点, 是旋转体平衡工艺的理想设备。
FY型系列动平衡机产品经改动后成为专用机, 以满足一些特殊形状的转子, 倍受广大用户欢迎。
二、主要技术性能三、基本结构3.1基本结构本系列动平衡机基本结构是由机械部分和电气测量部分两大部分组成。
3.1.1机械部分其轮廓可见附后的示意图, 它是由光电系统、弹性支承系统、传感器、传动系统等主要部分组成, 每个系统都有一定的独立性, 用一定的连接方式装在底座系统上。
3.1.2电气测量部分附图中标出了仪表正面的示意图, 标出了主要部分, 有的还简单说明其主要作用。
四、基本工作原理当被测转子由传动和驱动马达组成的驱动系统驱动时, 由于被测转子不平衡量而产生的离心力, 使得由悬挂板簧组成的弹性系统受迫作径向机械振动, 其振动频率等于转子旋转频率, 振动幅值与不平衡量成正比, 机械振动信号经过测振传感器转换成电讯号。
当转子旋转时, 光电头将涂在转子表面的标示线, 经过光敏三极管的通断输出一个脉冲( 其频率与转子旋转频率机同) 此脉冲作为相应基准讯号, 此讯号经锁相倍频后, 得到一个方波信号, 一方面用来测速, 一方面用来控制跟踪滤波器, 同时经分频分相后, 得到二个对称方波讯号, 它的频率与转速相同, 相位与光电基准脉冲对应。
飞宇科技FY系列航模平衡仪 FY-30A 多旋翼版本安装说明书
注意: a) 安装和使用本产品需要一定的多旋翼飞机的遥控技巧。 b) 假如您是一个从来都没有进行过任何一次多旋翼飞行操作的初学者,我们建议您别独
自安装本设备。请找有经验的人帮忙,您会需要他们为你提供一些基本知识以便您能成功地使 用本设备。
c) 如果您是一位富有经验的多旋翼飞机操作手,您会发现本设备的安装简单有序。只需 要按照本说明书进行操作就不会有差错。
X 字形布局
1 4
2 3
十字形布局
1
ON OFF
1234
X-Type QuadCopter Layout:
1 = ESC 1 2 = ESC 2 3 = ESC 3 4 = ESC 4
CCW CW CCW CW
cw = 顺时针
ccw = 逆时针
ON OFF
1234
4
2
十 - Type Quad Layout:
序言
FY30A 是一个基于惯性姿态测量的固定翼平衡仪。它集成了三轴陀螺仪,三轴加速度计可以 在三维空间内控制飞机的姿态,并且可以通过下载升级固件 V1.20 而用于多旋翼飞机。
适用机型:
FY30A 用于多旋翼可以试用一下机型:X 字形和十字形布局的四轴,三轴等。其他机型是否适 用请发邮件到此邮箱进行咨询:service@。
4. 我们强烈推荐使用我们配置的泡棉减震垫来做减震安装,具体安装方法参见下图。
检查减震安装情况 FOR VIBRATION a) 按照说明书中的建议安装 FY-30A, 并参看螺旋桨转动用法说明书。 b) 在自动平衡模式下发动油门,切记不要起飞! c) 观察红色的工作指示灯的状态。 d) 如果红色指示灯不亮,说明该情况下震动符合要求,可以保持正常工作。如果是红色指示
平衡机-平衡仪使用说明书第六页
电脑车轮平衡仪
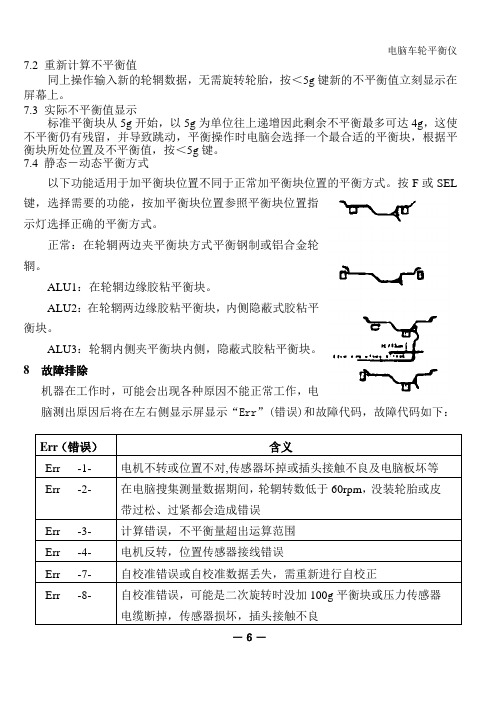
7.2 重新计算不平衡值
同上操作输入新的轮辋数据,无需旋转轮胎,按<5g 键新的不平衡值立刻显示在屏幕上。
7.3 实际不平衡值显示
标准平衡块从5g 开始,以5g 为单位往上递增因此剩余不平衡最多可达4g ,这使不平衡仍有残留,并导致跳动,平衡操作时电脑会选择一个最合适的平衡块,根据平衡块所处位置及不平衡值,按<5g 键。
7.4 静态-动态平衡方式
以下功能适用于加平衡块位置不同于正常加平衡块位置的平衡方式。
按F 或SEL 键,选择需要的功能,按加平衡块位置参照平衡块位置指
示灯选择正确的平衡方式。
正常:在轮辋两边夹平衡块方式平衡钢制或铝合金轮
辋。
ALU1:在轮辋边缘胶粘平衡块。
ALU2:在轮辋两边缘胶粘平衡块,内侧隐蔽式胶粘平
衡块。
ALU3:轮辋内侧夹平衡块内侧,隐蔽式胶粘平衡块。
8 故障排除
机器在工作时,可能会出现各种原因不能正常工作,电
脑测出原因后将在左右侧显示屏显示“Err ”(错误)和故障代码,故障代码如下: -6-。
FY系列动平衡机产品说明书
F Y系列动平衡机产品说明书内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)FY系列数显动平衡机使用说明书浙江省温岭市先导电机技术研究所h电话:0576-8614412286144065地址:浙江省温岭市经济开发区二期(楼山)目录1、概述2、主要技术性能3、基本结构4、基本工作原理5、安装与调试6、操作与使用7、平衡转速与平衡精度8、维护保养及故障排除9、附图一、概述FY型系列动平衡机产品,可用于中小型电机转子、转轴、转盘、汽车机械,电动工具等旋转零件,在电机、轻工、纺织等部门得到广泛运用。
FY型系列动平衡机采用数码显示,电气测量部分采用CMOS数字集成电路,该系列产品结构简单、性能稳定、灵敏度高、指示直观、通用性强等优点,是旋转体平衡工艺的理想设备。
FY型系列动平衡机产品经改动后成为专用机,以满足一些特殊形状的转子,倍受广大用户欢迎。
二、主要技术性能三、基本结构3.1基本结构本系列动平衡机基本结构是由机械部分和电气测量部分两大部分组成。
3.1.1机械部分其轮廓可见附后的示意图,它是由光电系统、弹性支承系统、传感器、传动系统等主要部分组成,每个系统都有一定的独立性,用一定的连接方式装在底座系统上。
3.1.2电气测量部分附图中标出了仪表正面的示意图,标出了主要部分,有的还简单说明其主要作用。
四、基本工作原理当被测转子由传动和驱动马达组成的驱动系统驱动时,由于被测转子不平衡量而产生的离心力,使得由悬挂板簧组成的弹性系统受迫作径向机械振动,其振动频率等于转子旋转频率,振动幅值与不平衡量成正比,机械振动信号通过测振传感器转换成电讯号。
当转子旋转时,光电头将涂在转子表面的标示线,通过光敏三极管的通断输出一个脉冲(其频率与转子旋转频率机同)此脉冲作为相应基准讯号,此讯号经锁相倍频后,得到一个方波信号,一方面用来测速,一方面用来控制跟踪滤波器,同时经分频分相后,得到二个对称方波讯号,它的频率与转速相同,相位与光电基准脉冲对应。
动平衡仪使用方法

动平衡仪使用方法
动平衡仪是一种用于测量和调整旋转机械设备动平衡状态的工具,它可以帮助
用户准确找到不平衡的位置,并进行精确的校正。
在使用动平衡仪时,需要遵循一定的操作步骤和注意事项,以确保测量和校正的准确性和安全性。
首先,使用动平衡仪之前,需要对设备进行全面的检查,确保设备本身没有其
他故障或损坏。
同时,也要检查动平衡仪本身是否完好无损,各个部件是否齐全并处于正常工作状态。
接着,将动平衡仪放置在需要测量和校正的设备上,确保它稳固地固定在设备
上并且不会受到外界干扰。
然后,根据设备的类型和尺寸选择合适的测量和校正方法,可以是单面测量或双面测量,也可以是静态平衡或动态平衡。
在进行测量时,需要按照动平衡仪的操作说明进行操作,通常包括启动仪器、
设置测量参数、进行测量等步骤。
在测量过程中,要保持设备处于稳定状态,避免外界干扰,并且注意观察动平衡仪显示的数据,确保数据的准确性和稳定性。
根据测量结果,可以进行相应的校正操作。
校正操作通常包括在特定位置添加
或去除适量的校正配重,以达到设备的动平衡状态。
在进行校正时,需要小心操作,确保校正配重的固定和稳定,避免对设备造成额外的损坏或不平衡。
最后,在完成测量和校正后,需要对设备和动平衡仪进行清理和保养,确保它
们处于良好的工作状态,以备下次使用。
总之,动平衡仪是一种重要的工具,它可以帮助用户准确找到设备的不平衡位置,并进行精确的校正。
在使用动平衡仪时,需要严格按照操作步骤和注意事项进行操作,确保测量和校正的准确性和安全性。
希望本文能够帮助您更好地掌握动平衡仪的使用方法,提高设备的运行效率和安全性。
FY-21AP惯性姿态平衡仪说明书
FY-21AP惯性姿态平衡仪说明书工作原理:惯性姿态平衡仪(AFSS)FY-21AP 是一款先进的惯性姿态平衡仪(简称AFSS)和模型飞机的简易自动驾驶仪。
FY-21AP集成了三轴陀螺仪,三轴加速度计组成一个精确无漂移的惯性姿态平衡系统。
同时,它利用GPS和气压传感器获得飞机精确的三维定位。
通过结合姿态控制和定位,实现惯性导航和自动驾驶。
FY-21AP通过桂林飞宇电子科技有限公司的专有的算法解算出飞机的飞行姿态,并且能探测飞机在三维及水平位置上的任意变化。
如果FY-21AP如果感应到飞机的飞行姿态跟水平飞行姿态有变化,,它会发出修正信号控制飞机的副翼舵、升降舵和方向舵,通过自动的不断的修正,从而实现把飞机修正到水平的平稳飞行的姿态。
打开FY-21AP时,操作者只需要放开操作杆,让控制摇杆回到中立位置,飞机就能自动恢复到平稳飞行状态。
你可以通过接收机上的一个独立通道来决定使用或者关闭本设备。
GPS,气压计和自动驾驶FY-21AP在上电后就开始搜索GPS定位信号,当首次检测到GPS定位并且使用的定位卫星大于5颗星后FY-21AP会记录当前的位置为返航点。
FY-21AP通过气压计的读数解算出一个精确的飞机的相对高度。
当FY-21AP工作在自动返航模式时,飞机自动飞向返航点,并且以开始进入返航时的高度定高飞行,到达返航点后以返航点为圆心盘旋,默认的盘旋半径为120米。
操作手同样可以在任意点选择自动盘旋模式,进入盘旋模式后飞机以进入盘旋时的高度定高飞行,和进入盘旋时的位置为圆心盘旋飞行,默认盘旋半径同样为120米。
这两种模式可以通过一个开关通道来进行选择。
设备功能:FY-21AP惯性姿态平衡仪●任意情况的定向稳定飞行—FY-21AP 可以在任意天气情况下自动保持飞机的水平飞行姿态。
对于刚开始学习飞行的人,FY-21AP不但可以很好的帮助练习飞行,增长你的经验,赢得更长的飞行时间,还可以帮助你增强自信心。
而且从起飞到降落的整个过程中你可以在任意的时间打开FY-21AP,操作方便。
VHF20A和20B电台试验器使用说明书

第一章:机载电子设备维修检测基本方法:第一节:检修程序:1、了解情况:1.1、维修人员接收到送检故障件后首先要通过送检故障单,阅读送检设备部件的历史资料等,了解故障现象和分析故障原因,作出初步故障判断。
1.2、按照送检设备件号查询和准备与该部件相符合的维修手册和相关技术资料,准备试验器和检测设备及连接电缆等附件。
1.3、如果送修件不是自己非常熟悉该设备电路原理和已经对该部件很有维修经验的时候,首先要静下心来认真消化该设备部件的维修手册,熟悉该部件整机电路工作原理和认真分析有可能与故障相关的电路。
1.4、按照维修校验规程连接好试验器、检测设备、故障部件。
1.5、按照校验规程检测故障部件,确认送检部件是否与送检故障相符。
2、检查压缩故障点:检查压缩,就是利用静态和动态实施检修的过程。
首先要进行对保险装置的检查,保险装置包括安装在部件上的速熔断保险丝、电源保安反向接入二极管、稳压二极管等进行检查,如有故障首先予以排除,保险装置检查合格后,方可通电检测。
常言道要“通过现象看本质”,检修故障也是如此,要能够顺利的压缩故障点,首先要认真、仔细、全面、准确地观察该部件故障现象,观察看电路板上有没有烧黑损坏的元器件,电路板上有没有异常的地方等,把握了故障现象在理论的指导下,作出正确的分析判断,按照一定的检修原则和方式,便可排除故障点。
3、修复检验:在检查压缩到故障点后,应立即修复,然后要加以检验。
检验的内容包括工艺焊接质量、机械性能和电气技术性能是否合格等。
检验方法应根据具体情况和校验规程条件确定,最简单的故障维修也要经过调整使用、试机,运用测试仪表和试验器进行技术指标检查,以确保主要技术性能指标达到维修手册的要求。
第二节:检修原则:为了正确而有效地实施检修,确保检修质量和安全,迅速修复,必须遵守一定的检修原则。
先思索后动手、先电源配件后机器、先外后内、先静后动、先简(易)后繁(难)、先通病后特殊等,这“六先六后”是每一个机载电子设备维修人员在检修中要遵守的原则。
动平衡测试仪操作说明

动平衡测试仪操作说明动平衡测试仪操作说明文件编号文件版本A/0 生效日期文件页码目的:规范仪器的操作步骤,提高测试的准确度。
适用范围:适用于各种单双面及软硬支撑平衡机,可配接各种速度传感器、压电传感器。
责任部门:测试中心操作说明:1.打开设备总电源开关,启动计算机,运行平衡机测量软件。
2.设置转子参数:测量界面中按“H”,然后按“S”键进入转子参数界面。
按“+”、“-”可增加或删除一行数据,“√”、“×”保存修改或取消修改。
“回车”键保存修改并返回主界面。
3.将被测转子固定于摆架上,设置转子参数并调整好光电头,按测量菜单里面的“测量”进入测量状态,此时“转速显示框”和“电平信号”显示当前转子速度及传感器的信号量.4.进度达100%时,显示框数值不再跳动,合格为“GOOD”,不合格为“NOT”.5.停止转子,读取数据同时注意量值、角度、单位及校正位置。
6.在转子校正界面相应角度进行加/去重,如此反复消除转子的不平衡量。
7.按“记录”进入浏览数据界面,点击“导出”按钮,选择保存路径,输入文件名,然后点击保存。
点击菜单“退出”键,按“确定”即可关闭软件。
注意事项:1.使用本仪器前必须详细参阅说明书,熟悉和掌握本仪器的结构和操作方法。
2.定期检测。
出现故障时,应由专门人员进行检修工作,防止故障扩大。
3.外壳需要接地,计算机电源应采用带地线电源,以防机壳带电和防干扰。
4. 如需搬移机器,务必在切断电源后,冷却后再操作。
编制审核批准日期日期日期。
飞宇科技FY系列航模平衡仪 FY-30A 固定翼版本说明书
FY-30A惯性姿态平衡仪安装&操作指南尊敬的客户:您好!感谢您使用桂林飞宇电子科技产品,为了更好的使用本产品,请在使用前认真仔细地阅读本说明书,以确保正确的使用及操作。
注意:∙安装和使用本产品需要一定的固定翼飞机的遥控技巧。
∙假如您是一个从来都没有进行过任何一次飞行操作的初学者,我们建议您别独自安装本设备。
∙请找有经验的人帮忙,您会需要他们为您提供一些基本知识以便您能成功地使用本设备。
∙如果您是一位富有经验的操作手,您会发现本设备的安装简单有序。
只需要按照本说明书进行操作就不会有差错。
如需要任何技术支持您可以直接发送邮件到:service@。
序言:FY-30A是一个基于惯性姿态测量的固定翼平衡仪。
它集成了三轴陀螺仪和三轴加速度计,可以在三维空间内控制飞机的姿态。
您可以通过接收机上的一个独立通道来决定使用或者关闭本设备。
平衡仪的功能包括以下几点:∙水平飞行—当您打开平衡仪后,FY-30A会自动控制飞机平稳飞行,对于刚开始学习飞行的人,FY-30A不但可以很好的帮助练习飞行,增长您的经验,长时间的飞行还可以帮助您增强自信心。
而且从起飞到降落的整个过程中您可以在任意的时间打开FY-30A,操作方便。
∙紧急恢复—如果您迷失方向了或者感觉到飞机失控了,此时您可以松开操作杆并且通过开关通道打开FY-30A,FY-30A会自动发出修正信号来保持飞机的平衡,使飞机回到水平飞行状态。
∙精确飞行—对于经验丰富的操作手来说,FY-30A可以有助于您实现更精准的飞行路线,特别是在在大风天气的时候。
∙FPV—对于长距离遥控或者FPV,您只需要控制飞机的航向便可以尽情的享受其中的乐趣,FY-30A可以帮您保持飞机的平衡。
∙固件升级—用户可以自行升级发布的新版本的固件程序,实现产品的不断升级。
工作原理:FY-30A平衡仪集成了三轴陀螺仪,三轴加速度计,组成基本的惯性导航平台,通过惯性捷联姿态算法解算得到飞机的飞行姿态。
飞宇电子DOS惯性姿态平衡仪安装说明书 2013.1.23
DoS 平衡仪单独工作时具备的功能 手动模式 —在该模式下,DoS 完全不参与控制,飞机的控制完全由操作手决定,相当于普
通的 RC 遥控。 自动平衡 — DoS 可以在任意天气情况下自动保持飞机的水平飞行姿态。这对于刚开始学
习飞行的人,操作飞行器变得非常的简单和容易。当你感觉飞机要失控的时候只要稳定飞 行的油门,松开操作杆,就可以自动恢复到水平状态。 3D 飞行 — 帮助稳定飞行姿态,会尽力去保持松杆的姿态飞行,让飞行更平滑,便于做各 种特技动作。
• 说明书; • 4PY 线一根;
进行操作就不会有差错。 如需要任何技术支持您可以直接发送邮件到 service@。
选配件: • GPS 模块 1 个;
1. 工作原理:
惯性姿态平衡仪(AFSS) DoS 模块
DoS 是一款先进的惯性姿态平衡仪(简称 AFSS)和简易自动驾驶仪。目前 V1.0 程序版本可
差动舵机 2 ESC/油门舵机 方向舵机
3)V 尾带副翼布局飞机对应表:
S1
S2
S3
S4
副翼舵机 1
差动舵机 1 ESC/油门舵机 差动舵机 2
4)V 尾无副翼布局飞机对应表:
S1
S2
S3
S4
差动舵机 1 差动舵机 2 油门舵机
空
6. DoS 的供电
S5 副翼舵机 2
S5 副翼舵机 2
AI L OUT
控制。
外形尺寸
: 32 x32x 10 mm;
航向的控制
在没有连接 GPS 模块的情况下,DoS 通过内置的三轴磁场计来测量航向,使用副翼或者方向
重量(不包括电线) 温度范围
: 22g; : -25°C~ +70°C;
第二讲:航模平衡仪如何维持飞机的水平飞行状态?
第二讲:航模平衡仪如何维持飞机的水平飞行状态?为简单起见,主要讲解常规布局的电动飞机的情况。
1.视野范围内的手动控制还在视野范围内时,用户可以通过肉眼判断飞机的大致飞行状态(航向、姿态、位置和速度),同时通过RC发射机来进行实时控制。
此时只有RC发射机的手动模式控制。
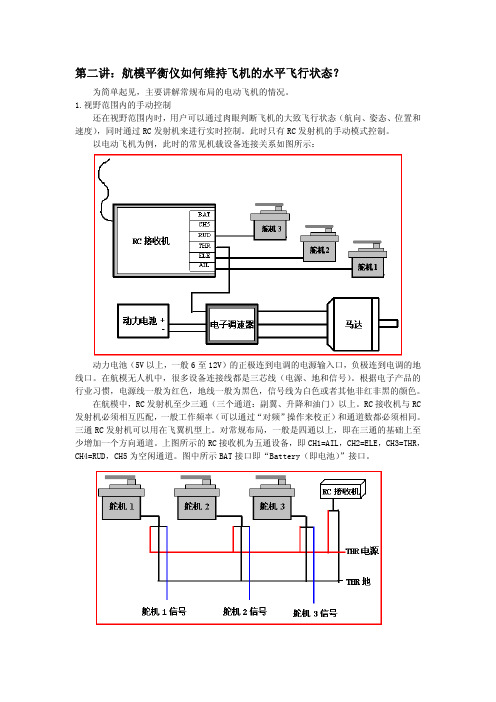
以电动飞机为例,此时的常见机载设备连接关系如图所示:动力电池(5V以上,一般6至12V)的正极连到电调的电源输入口,负极连到电调的地线口。
在航模无人机中,很多设备连接线都是三芯线(电源、地和信号)。
根据电子产品的行业习惯,电源线一般为红色,地线一般为黑色,信号线为白色或者其他非红非黑的颜色。
在航模中,RC发射机至少三通(三个通道:副翼、升降和油门)以上。
RC接收机与RC 发射机必须相互匹配,一般工作频率(可以通过“对频”操作来校正)和通道数都必须相同。
三通RC发射机可以用在飞翼机型上。
对常规布局,一般是四通以上,即在三通的基础上至少增加一个方向通道。
上图所示的RC接收机为五通设备,即CH1=AIL,CH2=ELE,CH3=THR,CH4=RUD,CH5为空闲通道。
图中所示BAT接口即“Battery(即电池)”接口。
在RC接收机接口面板内部,所有舵机的电源线已内部连通,相关地线也已内部连通,即只要给其中一个舵机通道供电,就能给RC接收机和其他舵机通道供电,此时RC接收机的BAT口可以悬空不用。
但因为各通道的信号内容互不相同,所以信号线各自独立。
2.FPV:视野范围外的手动控制飞机飞远后,无法通过肉眼直接观察,就只能通过无线通信手段,下载遥测数据并显示在地面监视器(如小电视机)。
最简单的方式就是利用OSD模块,把遥测数据叠加到图像数据上,再利用图传数据链路传回地面。
用户就能通过观察遥测数据知道飞机的实时飞行状态,然后利用RC发射机实时控制飞机。
但这对用户的遥控技术和精神状态有较高要求。
其中“OSD”为“On Screen Display”的英文缩写,意思是“视频叠加显示”,即把文字、数字和简单图形等叠加到视频图像上。
(信息与通信)LC-20A仪器操作
操作规范
按照仪器说明书正确安装和 操作,确保测量结果的准确 性和可靠性。
严格按照规定的操作步骤进 行测量,避免误操作导致数 据错误或仪器损坏。
在测量前应先进行校准,确 保仪器处于最佳工作状态。
测量过程中应保持安静,避 免外界干扰影响测量结果。
常见问题及解决方法
问题
仪器无法开机。
问题
测量结果不准确。
熟悉LC-20A仪器的操作流程,包括开 机、设置参数、运行测试和关机等步 骤,确保按照正确的顺序进行操作。
掌握LC-20A仪器操作中常见问题的处 理方法,如遇到异常情况时能够迅速 应对,保障测,需注意安全事项,如 避免仪器过热、防止触电等,确保测 试过程的安全性。
频率调节
用户可以根据需要调节信 号的频率,范围可从低频 到高频,满足不同频率段 的应用。
幅度调节
仪器具备信号幅度的调节 功能,用户可以根据实际 需求调整信号的幅度大小。
仪器特点
高精度
LC-20A仪器采用高精度组 件和先进的技术,确保信 号的稳定性和准确性。
易于操作
仪器配备友好的用户界面 和简洁的操作按钮,方便 用户快速上手。
培训与交流
加强操作人员的培训和交流,提高操作人员的技能水平和 经验积累。通过分享操作经验和技术成果,促进团队整体 水平的提升。
THANKS
感谢观看
的应用范围和便捷性。同时,加强售后服务和技术支持,为用户提供更
好的保障。
对未来操作的展望
技术发展
随着信息与通信技术的不断进步,LC-20A仪器未来将面 临更多的挑战和机遇。操作人员需要关注新技术的发展动 态,以便更好地适应未来的测试需求。
操作效率
未来可以通过改进仪器性能和优化操作流程,提高测试效 率,降低测试成本。同时,加强自动化和智能化技术的应 用,减轻操作人员的负担。
便携式动平衡测量仪使用须知 动平衡测量仪如何操作
便携式动平衡测量仪使用须知动平衡测量仪如何操作便携式动平衡测量仪随着现代化工业的飞速进展,对旋转机械的性能提出了越来越高地要求。
旋转设备其质量中心由于种种原因与旋转中心不重合时会因离心力产生振动。
便携式动平衡测量仪随着现代化工业的飞速进展,对旋转机械的性能提出了越来越高地要求。
旋转设备其质量中心由于种种原因与旋转中心不重合时会因离心力产生振动。
该振动严重影响了设备使用精度,缩短支撑轴承的寿命。
要除去这种振动必需用到动平衡技术便携式动平衡测量仪瞄准国内外最高技术,接受大规模集成电路和单片机技术。
该仪器具有多功能性,既可作转速表用,又可作振动测试用,特别是具有测量动平衡的一切功能。
便携式动平衡测量仪操作简单,人机对话,菜单提示,测量数据可随时锁定保持,配机内蓄电池和市电双重供电,很便利地用于现场旋转机械的动平衡测试。
也可与平衡机相配套,直接替代平衡机电箱,用于老平衡机的改造便携式动平衡测量仪的注意事项:1.用户在连续测量过程不要轻易按“复位"键,否则会丢失按键的全部数据。
假如手边有影响系数,可以重新输入。
2.确定要认真做好光电标志,察看机器转速的精准性。
这是仪器开展动平衡测试的紧要保证。
3.在动平衡试重法中,必需将巳知试重加到被测面的巳知位置上,要注意加重后的振动幅值与相位和原始的振动幅值与相位的变化情况。
假如数据变化不明显的话,以后经过计算处理的减振效果也不明显。
假如振幅变化不明显,就应加大试重的重量。
假如相位变化不明显,就应重新移动试重的位置。
4.初次对某转子进行平衡必需用试重法。
通过试重法得到影响系数后,对同类型转子进行平衡可用影响系数法,操作比较简单。
5.便携式动平衡测量仪(动平衡测试仪)可以用交流220V供电,也可以用机内12V蓄电池供电。
一般要求用交流220V充电,12V蓄电池供电,这样机内噪声相对要小。
请注意当蓄电池电压低于10V 时,要求适时充电。
否则会影蓄电池的寿命。
—专业分析仪器服务平台,试验室仪器设备交易网,仪器行业专业网络宣扬媒体。
3B S CIENTIFIC 惯性平衡器说明书

3B SCIENTIFIC ®PHYSICS1Instruction Sheet05/18 ALF1 Table clamp2 Steel spring strip3 MassesThe inertia balance allows for measurement of mass independent of Earth’s gravitational force. The apparatus consists of two metal trays connected by stiff steel spring strips. One tray has 3 holes to hold up to three masses. The other tray may be anchored to a table edge or laboratory bench with the included table clamp so that the stage can vibrate horizontally. The period of the horizontal oscillations depends on the mass on the stage.After the apparatus is calibrated by determining the vibration frequency for objects of known mass, it can be used to determine the unknownmasses.1 Inertia balance 1 Table clamp 1 Cord, 1.85 m 3 MassesLength of steel strip: approx. 350 mm Masses:approx. 175 g each1 Mechanical Stopwatch, 15 min 1003369The mass of an object is the amount of matter it contains, while its weight depends on the gravitational force acting on it. Most of the methods we use to compare masses depend on the forces they exert – in other words, they depend on their weight.The inertia balance gives us a method of comparing masses directly, and independently of the gravitational forces exerted on them.Attach the inertia balance to a table edge.3B Scientific GmbH ▪ Rudorffweg 8 ▪ 21031 Hamburg ▪ Germany ▪ Subject to technical amendment © Copyright 2018 3B Scientific GmbH∙Using no mass on the stage displace the apparatus slightly so that the stage vibrates horizontally.∙ Record the period for 10 oscillations.∙ Do three measuring runs, then average theresults.The period T of one oscillation is the time taken between the stage passing through its mid point, and the next time it passes through the same point, moving in the same direction.∙ Repeat this process using as many differentcombinations as possible of the three masses supplied.∙ Put your results into a table.∙ Plot a graph of period T against mass m .∙ Repeat the experiment with the unknownmass, and use the graph to find the magnitude of this mass.The inertia balance is actually a compound spring system. The period of an oscillating spring is given by the equationDmT ⋅π=224 (1)where T = period, m = mass on the spring, D = the spring's elasticity constant.∙ Plot a graph of T 2 against mass.∙ Determine the elasticity constant D from theslope of the graph.∙ Calculate the unknown mass m from theequation (1).。
FY系列说明书
京药管械(准)字2003第2540038号(更)产品标准号:YZB/京0033-2003-------------------------------------------------------FY系列医用保健制氧机产品使用说明书本产品通过:欧盟CE0197认证EN ISO 9001认证EN IS0 13485认证医疗器械产品质量认证医疗器械质量管理体系认证谢谢您购买亚奥系列产品,使用产品前请仔细阅读本说明书并请阅后妥善保管,以备日后查阅感谢您使用亚奥制氧机亚奥FY系列医用保健制氧机是由我公司在1992年开发、研制成功的中小型系列医用分子筛制氧设备。
产品符合国家食品药品监督管理局颁布的医用分子筛制氧设备通用技术规范(《YY/T0298—1998医用分子筛制氧设备通用技术规范》)的各项标准,并通过了北京市食品药品监督管理局的市场准入审定,可以为您提供可靠的服务。
亚奥制氧机采用压力传感控制模式,按分子筛的最佳工作气压值设定为切换控制点,其优点是一是防止过高的气压对分子筛的破坏;二是在气压低的情况下,包括空压机长期运转磨损供气量下降后,以及海拔升高空气稀薄时,都可自动调整流程程序,防止分子筛的粉化,保证氧气高浓度的产出,从而整体延长了制氧机的使用寿命。
亚奥制氧机采用的是目前国际上领先的低压流程设计,其优点一是产氧速度快,3分钟左右氧气浓度即可达到90%以上;二是低压运行安全、稳定,并可减小各类组件的磨损,又有利于延长制氧机的使用寿命。
亚奥制氧机的品质保证不仅仅体现在保修期比较长,而且还承诺氧浓度保证,具体请参照《保修证书》。
为了让您购置的制氧机能提供满意的服务,请您在使用前详细阅读说明书,全面了解和掌握你所购置机型的性能及正确的操作、维护方法。
2特别警告使用亚奥制氧机前,必须认真阅读本说明书,按要求操作,并且在医生的指导下使用。
急需用氧者及重症患者在使用本装置时必须自行配置钢瓶氧、液态氧气系统或氧气袋等备用,应付可能出现的如停电、自然灾害、机器故障等供氧停止现象。
平衡机-平衡仪使用说明书第四页
电脑车轮平衡仪3.3 不平衡方式转换
TH→动平衡→静平衡
功能键→S方式→平衡方式1→平衡方式2 →平衡方式3
4 安装轮胎
4.1 安装主轴丝杆
安装主轴丝杆时用工业酒精或汽油将接触面上的防锈油擦干净,以免影响安装精度,在随机附件箱内有一根主轴丝杆,对准主轴上安装孔,一定要拧紧否则会影响重复测量精度。
4.2 安装轮胎
4.2.1 先装轮胎,选择与轮辋匹配的锥度盘套在主轴上,锥度盘小头朝内。
4.2.2 装好后用快速螺母锁紧。
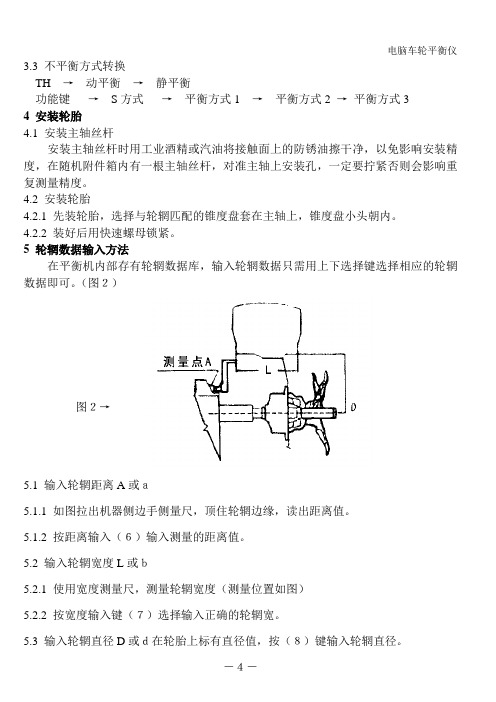
5 轮辋数据输入方法
在平衡机内部存有轮辋数据库,输入轮辋数据只需用上下选择键选择相应的轮辋数据即可。
(图2)
图2→
5.1 输入轮辋距离A或a
5.1.1 如图拉出机器侧边手侧量尺,顶住轮辋边缘,读出距离值。
5.1.2 按距离输入(6)输入测量的距离值。
5.2 输入轮辋宽度L或b
5.2.1 使用宽度测量尺,测量轮辋宽度(测量位置如图)
5.2.2 按宽度输入键(7)选择输入正确的轮辋宽。
5.3 输入轮辋直径D或d在轮胎上标有直径值,按(8)键输入轮辋直径。
-4-。
动平衡仪使用说明

6. 测试结束,动平衡仪显示出需要增加配重块儿的质量,旋转轮胎至动平衡仪灯全部亮起,此时表示轮胎的12点方向位置(即轮胎顶部位置)为需要增加配重的位置,将准备好的贴片粘到该位置(如两个位置需调整,则调完一个位置按同样方式调整另一位置即可),重新测试一遍,确认动平衡正常。
动平衡仪使用说明
1. 将轮胎固定到动平衡仪的转动轴上,车轮外侧朝外。
2. 测量车轮轮辋处到仪器的距离“Dis”(动平衡仪上有尺子,拉出尺子贴近轮辋处,读数即可,需注意单位为inch还是mm),将数据输入到动平衡仪上。
3. 测量轮辋宽度“Br”,动平衡仪带有测量轮辋宽度的尺子,将尺子两侧贴近轮辋,直接读数即可(需注意单位为inch还是mm),将数据输入到动平衡仪上。
平衡仪使用指南
平衡仪使用指南准备工作:该平衡仪不支持的电脑系统:除VISTA 64 位以外,其余系统均可兼容。
在安装平衡仪之前,可以先将遥控器和接收机进行对频,步骤如下第一次对频必须严格按照以下步骤:1:按住发射机对频按钮开机2:接收机插上对频线上电,接收机指示灯闪烁两次熄灭3:关发射机,拔掉接收机电源和对频线4:接收机上电(不能插对频线)5:打开发射机(不要按对频按钮),约三秒接收机指示灯闪烁转为恒量。
以后开机没有顺序。
备注:如果接收机指示灯不闪烁的话,把接收机重新上电,但是上电之前要把发射机关掉。
对频完成后,方便接下来的调试以及初期舵机检测。
初次使用平衡仪时,先将USB 连接线连接电脑,按照电脑提示的步骤安装好驱动程序。
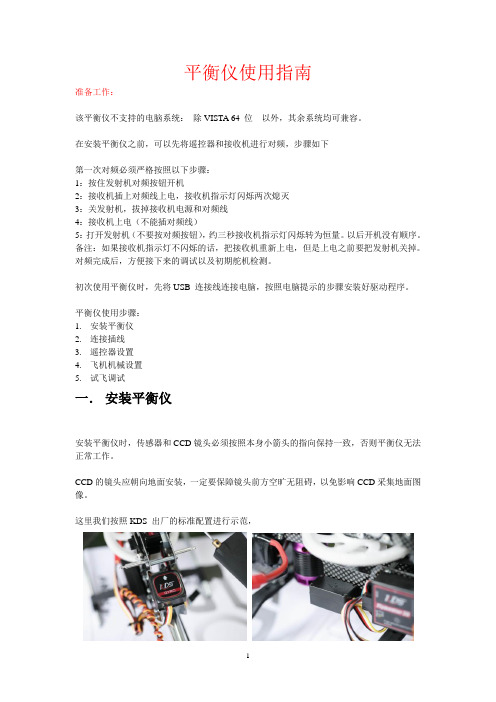
平衡仪使用步骤:1.安装平衡仪2.连接插线3.遥控器设置4.飞机机械设置5.试飞调试一.安装平衡仪安装平衡仪时,传感器和CCD镜头必须按照本身小箭头的指向保持一致,否则平衡仪无法正常工作。
CCD的镜头应朝向地面安装,一定要保障镜头前方空旷无阻碍,以免影响CCD采集地面图像。
这里我们按照KDS 出厂的标准配置进行示范,二.连接插线安装好平衡仪以后需要开始连接插线。
KDS K-7X 遥控器配带的接收机,与FUTABA 的接收机插线方法一样PS:关于平衡仪感度线和陀螺仪感度线,这两根线都可插可不插,其区别在于:当在接收机第五通道插上平衡仪(蓝色插头)的感度线时,电脑设置的平衡仪感度不起作用了,这时平衡仪的感度直接由遥控器的第五通道控制。
如果将平衡仪感度线拔掉,平衡仪的感度又恢复到电脑里设置的感度值。
陀螺仪感度同上。
平衡仪连接接收机的完成示意图:450SV:450C:连接好平衡仪和接收机以后,需要将舵机和平衡仪的中央控制盒连接起来。
副翼通道连接中央控制盒的第一插口,升降通道连接第三插口(这是固定的),螺距通道插第二插口,尾舵机插第五插口(这是固定的)。
中央控制盒可以根据各自飞机的情况选择固定的位置,建议调机结束后再固定中央控制盒。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Email:feiyudz@
桂林飞宇电子科技有限公司
手决定,相当于普通的 RC 遥控。 • 模式 2:3D 控制模式。在该模式下,只稳定飞机三个轴向的滚转控制,平衡仪通过陀螺仪感
应三个轴向的滚转速率,并通过相应控制舵面给出自动控制量,阻止飞机各轴向的滚动,使 飞机趋于保持当前姿态。在该模式下可轻易操纵飞机稳定地完成各种动作。 • 模式 3:自动平衡模式。在该模式下,如果感应到飞机的飞行姿态跟水平飞行姿态有变化, FY-20A 会给出自动控制量把飞机自动修正到水平的平稳飞行姿态。 b). 选择 FY-20A 的工作模式时,你可以设置你的遥控器使该开关通道输出信号的高电平时间如下表
行操作就不会有差错。
如需要任何技术支持您可以直接发送邮件到 feiyudz@。
桂林飞宇电子科技有限公司
1
Email:feiyudz@
桂林飞宇电子科技有限公司
FY-20A 惯性姿态平衡测量的固定翼平衡仪。它集成了三轴陀螺仪,三轴加速度计可以在 三维空间内控制飞机的姿态。你可以通过接收机上的一个独立通道来决定使用或者关闭本设备。平 衡仪的功能包括以下几点:
副翼舵机
升降舵机
2)无副布局飞机舵机对应表:
舵机 1
舵机 2
方向舵机
升降舵机
桂林飞宇电子科技有限公司
舵机 3 方向舵机
舵机 3 不连接
7
电动机
Email:feiyudz@
桂林飞宇电子科技有限公司
3)飞翼飞机舵机对应表:
舵机 1
舵机 2
差动舵机 1
Email:feiyudz@
桂林飞宇电子科技有限公司
一、平衡控制原理框图
三轴陀螺
惯性捷联 姿态计算
三轴加速度
二、FY-20A 的接口
当前偏航速率 目标偏航速率 当前横滚角 目标横滚角 横滚角速率 当前俯仰角 目标俯仰角 俯仰角速率
航向稳定 PID 控制
方向伺服舵机
横滚角 PID 控制
FEIYU TECH
FY-20A 惯性姿态平衡仪
安装 & 操作指南
桂林飞宇电子科技有限公司
Addr: 桂林市朝阳路高新信息产业园创新大厦 B305 Website: Email: feiyudz@
桂林飞宇电子科技有限公司
尊敬的客户:
您好!感谢您使用桂林飞宇电子科技产品,为了更好的使用本产品,请在使用前认真仔细地阅 读本说明书,以确保正确的使用及操作。
副翼舵灵敏度 舵调节旋钮
升降舵灵敏度 舵调节旋钮
接口插针面板
A B C 9 87 6 5 4 3 2 1 顶视图
桂林飞宇电子科技有限公司
5
Email:feiyudz@
桂林飞宇电子科技有限公司
插针接口排列表
9
8
7
6
5
4
3
2
1
序号
保留 保留 差动 模式
当 FY-20A 工作在自动平衡模式时,一旦探测到飞机的姿态与水平线之间的角度产生变化时,它 会发出修正信号控制飞机的副翼舵、升降舵和方向舵来保持飞机的平衡。
通过 FY-20A 持续的修正会使得飞机自动回到平衡的飞行姿态。升降舵控制飞机的俯仰姿态(向 上或者向下),副翼舵控制飞机的横滚,方向舵修正飞机的飞行方向是向左或者向右。
A
3.在平衡模式下,水平放置平衡仪时,控制舵面自动有偏转。
B
陀螺初始化过程:插上陀螺初始化跳线,然后给平衡仪上电
C
的时候保持静止,并且 20 秒钟以上。断开电源拔掉跳线。 9 8 7 6 5 4 3 2 1 陀螺初始化过程:
插上陀螺初始化跳线(如右图所示),
然后给平衡仪上电的时候保持静止,并且 20 秒钟以上,此刻你会看到红色指示灯以两种不同的 频率闪烁。
b). 产品中附带的 RC 接收机和 FY-20A 的连接线。
c). 使用 FY-20A 建议使用 5 通道以上的 RC 接收机
桂林飞宇电子科技有限公司
6
Email:feiyudz@
桂林飞宇电子科技有限公司
d). 接收机的其中 3 个通道用于输出副翼舵,升降舵,方向舵的信号,并使用提供的配线把各相应的 控制舵机接到平衡仪上。
用 FY-20A 平衡仪飞行非常简单。飞机控制者只需把控制杆放在正中,飞机会自动回到平衡的飞 行姿态。
当 FY-20A 工作在 3D 模式时,如果飞机正在进行杂技飞行,平衡仪通过陀螺仪感应三个轴向的 滚转速率,并通过相应控制舵面给出自动控制量,阻止飞机各轴向的滚动,使飞机趋于保持当前姿 态。
平衡仪对使用环境没有任何要求,可以在各种天气条件下,或者室内使用,安装好之后不需要 其他初始化过程,通电后飞机即可起飞。
d). 如果不连接 FY-20A 的开关通道,平衡仪将默认为自动平衡模式。但是我们并不提倡使用平衡仪 时开关通道没有信号输入,因为这样可能会发生自动平衡控制不准确的情况。
e). 我们建议别在模式 2,即 3D 模式下降落,因为飞机在 3D 模式下的姿态并不是很适合平稳的降落。 f). 注意,FY-20A 没有油门控制通道,它并不控制飞机的油门,油门通道应该从电调直接接到接收
桂林飞宇电子科技有限公司
2
Email:feiyudz@
桂林飞宇电子科技有限公司
FY-20A 产品包括内容:
• FY-20A 控制模块 1 个; • RC 接收机连接线 4 组; • 海绵双面胶或自粘魔术贴 1 个; • 减震架 1 个; • 使用手册 1 本。
四、FY-20A 在飞机上的安装注意事项
a). FY-20A 上的陀螺和加速度传感器是对震动敏感的元件,为了让 FY-20A 平衡仪发挥到最佳性能, 在把 FY-20A 安装在模型飞机上时一定要尽可能地将震动减到最小。
注意:
• 安装和使用本产品需要一定的固定翼飞机的遥控技巧。 • 假如您是一个从来都没有进行过任何一次飞行操作的初学者,我们建议您别独自安装本设备。 • 请找有经验的人帮忙,您会需要他们为你提供一些基本知识以便您能成功地使用本设备。 • 如果您是一位富有经验的操作手,您会发现本设备的安装简单有序。只需要按照本说明书进
横滚伺服舵机
俯仰角 PID 控制
俯仰伺服舵机
向前!安装时和机 头方向保持一致。
震动状态指示灯,震 动过于剧烈有可能影 响性能时,该指示灯 亮。(蓝色)
方向舵灵敏度 舵调节旋钮
正常工作时,指示灯 闪烁。(红色)
需要初始化陀螺时, 连接该跳线,保持静 止不动 20 秒。正常使 用时不要连接该跳 线。
升降和副翼差动功能 跳线。升降和副翼差 动输出时连接该跳 线。
e). 平衡仪还需要一个开关通道通过一个三段开关来控制 FY-20A 平衡仪的工作状态。 f). 以至少 5 通道的接收机为例:
通道 1 = 输出副翼舵 通道 2 = 输出升降舵 通道 3 = 输出油门舵 通道 4 = 输出方向舵 通道 5 = 作为开关通道通过三段开关来控制 FY-20A 的工作模式。
断开电源拔掉跳线。 注意:
• 只有出现以上三种情况的时候才执行陀螺初始化过程,并不要求也不必要经常对陀螺进行初 始化。
• 在陀螺初始化时并不需要平衡仪处于水平状态,但是必须确保平衡仪在初始化期间没有任何 肉眼能够看出的晃动震动,否则必须重新初始化!
三、应用连接框图
a). FY-20A 的供电 • FY-20A 平衡仪的电压输入为 4-6V; • 平衡仪的供电是通过与接收机的连接线和接收机使用同一电源。 • 如果是电动飞机,接收机的供电一般是由电子调速器供给。你也可以把接收机和 FY-20A 分开 独立供电。 • 如果是油动飞机则需要使用电池给接收机和 FY-20A 供电。
• 水平飞行—当你打开平衡仪后,FY-20A 会自动控制飞机平稳飞行,对于刚开始学习飞行的 人,FY-20A 不但可以很好的帮助练习飞行,增长你的经验,长时间的飞行还可以帮助你增 强自信心。而且从起飞到降落的整个过程中你可以在任意的时间打开 FY-20A,操作方便。
• 紧急恢复—如果你迷失方向了或者感觉到飞机失控了,此时你可以松开操作杆并且通过开 关通道打开 FY-20A,FY-20A 会自动发出修正信号来保持飞机的平衡,使飞机回到水平飞 行状态。
适用以下遥控设备:
FY-20A 适用于以下遥控设备: • Robbe-Futaba PPM / PCM 1024 / PCM G3 模式,2.4G 系统; • Graupner/JR PPM 8, PPM 12, SPCM 模式; • MPX PPM8, PPM 12 with UNI 模式 以及其他使用 1.5 ms 标准中立位置的遥控设备。
技术指标:
工作电压 电流 外形尺寸 重量(不包括电线) 温度范围 最大允许转动速率
应用范围:
: 4.0~6.0 Volt; : 52mA (5V); : 55 x 33 x 20 mm; : 20g; : -25°C~ +70°C; : ≤ 1200 °/s。
适用以下机型: 1. 正常布局固定翼飞机; 2. 飞翼布局带方向舵的飞机; 3. 飞翼布局无方向舵飞机; 4. 无副翼飞机; 5. 带副翼 V 尾飞机; 6. 无副翼 V 尾飞机; 7. 其他机型是否适用请发邮件到此邮箱进行咨询- feiyudz@。
• 精确飞行—对于经验丰富的操作手来说,FY-20A 可以有助于你实现更精准的飞行路线,特 别是在在大风天气的时候。
• FPV—对于长距离遥控或者 FPV,你只需要控制飞机的航向便可以尽情的享受其中的乐趣, FY-20A 可以帮你保持飞机的平衡。
工作原理:
FY-20A 平衡仪集成了三轴陀螺仪,三轴加速度计,组成基本的惯性导航平台,通过惯性捷联姿 态算法解算得到飞机的飞行姿态。
FY-20A 可工作在三种模式
a). FY-20A 可以工作在三种工作模式,你可以通过接收机的一个空闲通道来选择这三种模式。这三