Generic control system design for the Cassette
蒂安(Trane)中央空调系统终端产品说明书

Controls Solutions to Fit Your Needs Terminal Products2Fan Coil/Cabinet Unit HeaterA Trane ® UniTrane ® fan coil is an in-room unit composed of a fan and chilled or hot water coils. Fan coil units are ideal for hotels, condominiums, dormitories and apartments. Trane ® Force-Flo ® cabinet heatersare high-capacity forced-air fan coil units for entryways and corridors in large office buildings, schools, hospitals and dormitories.Unit VentilatorsTrane unit ventilator operates on the same principles as the fan coil but is tailored specifically for schools with a sturdy institutional design and an integrated airsideeconomizer. Applicationsinclude schools, as they are an especially effective solution for classroom renovation projects.Trane Family of Terminal Products It’s time to take another look at the terminal. As your partner, Trane ® understands it takes more than a concept to design an effective HVAC system. Between cost and code compliance—not to mention comfort, acoustics and efficiency—the complicated priorities can be challenging to satisfy.The Trane family of terminal products has been redesigned from the inside out, with innovative high-efficiency upgrades guaranteed to fulfill virtually any building’s requirements without compromising your needs. Now, these terminal units come standard with an exclusive Trane electronically commutated motor (ECM), or you can upgrade to any one of the available terminal controllers. No matter the project, Trane has the controls to suit your design needs.From chillers to compressors, the complete line of variable speed Trane HVAC solutions are designed to worktogether to deliver exceptional performance and value. These high-efficiency systems with flexible configurations can be the perfect fit for your building.Blower Coils A Trane blower coil is an entry level air handler for chilled water or refrigeration systems with ducted air distribution. Applications include schools, hospitals, offices, retail stores and stadiums.Vertical High Rise Fan Coil Trane vertical high rise fan coils are intended for single zone applications. These units are used in high rise hotels, and condominiums. We work closely with engineers at the design stage to ensure optimum use of the units within the HVAC system.Terminal Transformed Array Trane® developed innovative control algorithms that maximize the performanceand efficiency for each of the units under all operating conditions.Only Trane terminal products are available with factory mounted, wired andprogrammed Tracer® unit controllers, providing unmatched system integrationand performance optimization.Flexible ConnectivityHigh-efficiency terminal products—unlike competitive offerings—allow forbuilding connectivity through multiple control options. Preprogrammed Air-Fi®wireless controls can offer plug-and-play connectivity, as well as individual guest control.Tracer UC400-B Unit ControllerSingle Zone VAV Trane terminal ECM units integrated with UC400-B unit controller are the industry’s first factory commissioned Single Zone VAV solution, with automated and optimized motor speed adjustments to meet a space’s heating or cooling needs.Controlled CostsThe lowest total cost of ownership in the industry makes the new Trane high-efficiency terminal units a value-added asset to any building’s HVAC system.Adjustability and Serviceability at your FingertipsWe separated the Trane ECM from the VelociTach™ motor control board, and added an LED display and manual interface. The VelociTach motor control board continues to offer independent adjustability of motor speeds and easy to change setpoint functionality.This delivers the convenience of a visual status report and the ease of push button adjustments, facilitating optimalperformance and simplifying serviceability.34Customer Supplied Terminal Interface (CSTI)• For use with customer supplied controllers or thermostats• All end devices wired to a low voltage terminal strip• 2-position devices (valves / dampers)• Rotary Off/High/Med/Low voltage fan switch available with CSTI• Allows customer to select the desired speed setting through a local or remote controller with the following features:-Electric heat will override customer or building request-Conflicting speed requests will result in the highest speedrequested by any system-We offer 5 “binary” optically isolated electronic speed inputs.3 of these are assigned for H, M, L use.-We offer a 0-10V (or specific Pulse Width Modulating signal)input for use with a controller with fan modulating outputs.It is OK to use these in parallel with our fan switch.• The system is configured as default, so that minimum voltage input drives the fan to low speed for catalog capacity, and max voltage drives it to high speed.Simple ThermostatTrane’s newest, simple thermostat controller solution is a standalone option for your terminal product. This means that this thermostat is a plug and play option that does not require a BAS integration.• 2-position devices (valves / dampers)• Manual output test• Random start• Freeze avoidance (Low Limit)• Condensate overflow• Occupied / Unoccupied• Factory Tested and Commissioned•Non-communicating5Tracer ® ZN520• Communicating controller-Built-in dehumidification-Ventilation reset-Auto-Fan Speed Adjustment-Water balancing via valve override• LonMark Certified• Easy Leader/Follower set-up• Generic I/O use with Summit• Modulating Floating Point ControlTracer ® UC400-BThe UC400-B single-zone VAV controller maximizes fan speed while reducing energy consumption by delivering only the airflow necessary to address the space load.This programmable controller’s functions include:• Random start• Warm-up, pre-cool• Freeze avoidance• Built-in dehumidification• Auto fan speed adjustment• Discharge air temperature control• Factory-installed, -tested and –commissioned BACnet ® control• Programmable based on Trane Select Assist ™ selection• Features-Single Zone VAV-Warm-up, Pre-cool-Active dehumidification• Application considerations:-As part of a Tracer SC or Tracer Summit building automation system (BAS)-Can function as a completely stand-alone controller-Can be used as an interoperable unit controllerFan Coil Controls6Cut the wires—and get comfortable withTrane Air-Fi wireless.Trane® Air-Fi® wireless communication is a reliable, flexible solution that frees you from the hassles associated with traditional wired systems for your building controls.With Trane Air-Fi wireless, you get easy problem solving, efficient performance and cost savings over the life of the equipment.Trane Air-Fi wireless provides worry-free operation. The system offers twice the signal range and four timesthe potential paths compared to other wireless systems on the market to help prevent communication failures. Additionally, the lifetime* battery eliminates the need to replace batteries over the life of the system and savestime and money.Worry-free operationTrane Air-Fi wireless eliminates the headaches associated with troubleshooting wired networks.• Wire-free communication extends throughout the entire network, for reduced troubleshooting compared to traditional wired systems.• Self-healing mesh technology with redundant signal paths help prevent communication loss.• Maximum signal range ensures reliable data transfer at longer range.• Building automation networks are secured by the use of AES-128 encryption, keys and device authentication.• Trane® Air-Fi® wireless uses a separate, secure network from those used by your IT systems.• The system reliably coexists with other wireless systems and networks in your building, so you can have multiple wireless solutions that conform to IEEE 802.15.4 standards to best meet your needs.• Temperature, humidity, CO2 and occupancy information from one sensor—with all the advantages of wireless—result in a streamlined process and ease of operation.7Learn more at Trane – by Trane Technologies (NYSE: TT), a global climate innovator – creates comfortable, energy efficient indoor environments through a broad portfolio of heating, ventilating and air conditioning systems and controls, services, parts and supply. For more information, please visit or .© 2021 Trane. All Rights Reserved. All trademarks referenced in this document are the trademarks of their respective owners.CNT-SLB002-EN09/22/2021。
QUARC_Quancer公司产品,自动控制软件介绍

A SINGLE PC SOLUTION FOR RAPID CONTROL PROTOTYPING IN WINDOWS ®.QUARC generates real-time code directly from Simulink®-designed controllers and runs the generated code in real-time on the Windows® target - all on the same PC. The Data Acquisition Card seamlessly interfaces with Simulink® using Hardware-in-the-loop blocks provided in the QUARC T argets Library.SPLIT SECOND CONTROL DESIGN – A DECADE IN ThE MAkINGQUARC was built on the legacy of WinCon, the first real-time software to run Simulink®-generated code in Windows®. QUARC seamlessly integrates with Simulink® and redefines the traditional design-to-implementation interface toolset. Just click a button to enjoy more functionality and development flexibility, all geared towards improved real-time performance. Academics havesuccessfully deployed many advanced control and mechatronic systems, ranging from intelligent unmanned systems to force-feedback-enabled virtual reality.ADVANCEDINDUSTRIAL R&DACADEMIA INDUSTRYFOUR USES OF QUARCCONTROLS EDUCATION INNOVATIVERESEARCH GRADUATE-LEVEL EXPLORATION Enhance your engineering courses with industry- relevant hands-on learning Explore practical solutions for real-life challenges with a synergistic approachConduct ground-breaking research in emerging areas such as Unmanned Vehicle Systems and hapticsFast track time-to-market with an affordable rapid control prototyping solutionChoosing software for control system design andimplementation is critical for timely, successful research and development. Quanser knows this because we’ve pioneered control engineering for over 20 years. That’s why we created QUARC – a powerful rapid control prototyping tool that significantly accelerates control design and implementation. initially designed for industrial demands, QUARC is nonetheless ideal foradvanced research, masters-level, and evenundergraduate, teaching. QUARC is an integral part of all Quanser control lab workstations and is used all over the world by thousands of educational institutions and organizations, including the Canadian Space Agency and Defense Research and Development Canada. Discover what QUARC can help you achieve in less time and effort than you might be spending now.ACCELERATE CONTROLS EDUCATIONQUARC is an ideal tool to teach control concepts. It allows students to draw a controller, generate code and run it - all without Digital Signal Processing or without writing a single line of code. The capabilities of this powerful yet adaptable software are emphasized by the comprehensive curriculum that accompanies Quanser’s control lab equipment. The supplied Instructor and Student Workbooks feature lab exercises and projects based on Simulink®. They help focus students’ efforts on key control concepts rather than tedious code writing. The curriculum is developed by engineers for engineers to effectively demonstrate and teach the mechatronic design approach practised in industry. This includes modeling, controller design, simulation and implementation. An excellent low-cost rapid control prototyping system, QUARC is being usedby thousands of institutions worldwide. It is an effective and efficient teaching tool for undergraduate and graduate-level courses in classical and modern control theory.hOW QUARC FUSES MULTIPLEENGINEERING COURSESThe Integrated Learning Centre at Queen’s University fuses all engineering disciplines into one modern lab. Quanser’s workstations, featuring a wide range of modular Quanser experiments, are used here to teach introductory, intermediate and advanced controls. QUARC software is an integral part of all those workstations. An economical approach to outfitting a lab, it also keeps students motivated, providing access to even more hands-on learning.CONTROLS EDUCATIONis done, allowing the studentsto focus more on the controldesign theory and less on theworkings of MATLABSimulink, thus improvingthe learning experience.”Dr. Wen-Hua Chen,Loughborough University,United KingdomThis Flexible Link module furtherexpands your topics of study withthe SRV02 workstation.All on a Single PCQUARC provides a single PC solution for rapid control prototypingin Windows XP® or Vista®. It generates real-time code directly fromSimulink®-designed controllers – but for the same PC. This single PCSolution for rapid control prototyping significantly accelerates controldesign and implementation. This helps students focus on theimportant aspects of the control design process and completeproject-based assignments successfully.Simple. Intuitive.QUARC user interfaces are easy to understand without training.For example, QUARC’s “external mode” communications allow theSimulink® diagram to communicate with real-time code generatedfrom the model. Tune parameters of the running model by changingblock parameters in the Simulink® diagram. Want to view the statusof a signal in the model? Simply open a Simulink® Scope (or any otherSink in the diagram) while the model runs on the target. Furthermore,data can be streamed to the MATLAB® workspace or to a file on diskfor off-line analysis.Low MaintenanceQUARC streamlines the process of maintaining and servicing a laboratorywithout sacrificing system performance or an excessive amount of yourstaff’s time. The extremely flexible host-target structure allows QUARC usersto maximize limited resources (i.e. PC, laptop and hardware) with minimaleffort or cost. Host (control design environment) and target (platformwhich executes the real-time code) can be on separate computers yet stillcommunicate through a network connection. QUARC can sustain anypossible multi-configuration. Ask about License Server Architecture.The Integrated Learning Center, Queen’s University, Canada.BRING ThEORIES TO LIFEWhether you’re exploring emerging technologies or transforming knowledge into solutions for real-world challenges, count on Quanser to help you achieve your research goals. The power of QUARC software combined with Quanser’s innovative plants can helpresearchers test their theories in real-time, on real hardware. QUARC seamlessly integrates with Quanser’s research platforms toimplement virtually any control algorithm. Combine QUARC with Quanser’s multi-function Data Acquisition card and plants to create a self-contained control workstation ideal for advanced research. Use it to design, simulate, implement, and test a variety of time-varyingsystems: communications, controls, signal processing, video processing, and image processing.All this is achievable quickly , easily and affordably because the workstation is a fully integrated, open-architecture solution.The set-up pictured below shows a 3 DOF Gyroscope workstation as one example of a Quanser workstation for high level research. This typical configuration entails: • P lant • Amplifier• Data Acquisition Card • Virtual Plant Simulation• Rapid Control Prototyping Design Software • Pre-designed ControllersFor more information about the Quanser’s research platformsplease visit /MCC.14323 DOF GYROSCOPEFeaturing three Degrees Of Freedom (DOF), this dynamically diverse experimental platform is ideal for teaching rotational dynamic challenges.DATA ACQUISITION CARDMeasure and command real-time signals with high I/Osampling period. QUARC supports a wide range of Quanser and National Instruments data acquisition cards. For a complete list please visit /QUARC.AMPLIFIER AMPAQQuanser’s multi-channel linear current amplifier is ideal forprecision controls. The AMPAQ connects to the DAQ terminal board and is connected to the 3-DOF Gyroscope with its easy-connect cables.SOFTWARE TO ACCELERATE DESIGN3-DOF Gyroscope models are designed to run in real-time with QUARC ® software, which integrates seamlessly withMATLAB ®/Simulink ®.“Using Quanser’s software, we can easily design control systems for many plants. We can apply complex control strategies quickly and effectively - and it is very easy to verify theory on the real plant.”Kenichi yano,Associate Professor, Gifu University , JapanEFFORTLESS INTEGRATION FOR MEChATRONIC RESEARChQUARC is a powerful, flexible mechatronic integration tool, providing time-saving and simple solutions to those unique challenges encountered when you’re developing mechatronic systems. Whether you have custom-made research platforms or use manufactured equipment, QUARC is the only software that makes it easy to interface with all of them. QUARC offers a suite of third-party device blocks which help researchers seamlessly interface and control KUKA robots, PGR cameras and SensAble® PHANTOM devices, to name a few. These blocks not only allow a Simulink® model to communicate with external devices but also implement the mathematical framework for controlling them. All this is possible without the need to learn new tools or hand coding since the controller design and integration is performed in an environment most researchers are familiar with, such as Windows®, MATLAB®, Simulink®.“QUARC’s support of TCP/IP has been a tremendous help for our research. It allowed us to develop a distributed sensing system that isn’t dependent on expensive I/O hardware or DAQ boards. Further, this allows for safety-critical redundancy when we aredoing vehicle control tests.”Sean Brennan,Department of Mechanical and Nuclear Engineering,Pennsylvania State University , USAQUARC OFFERS OVER 10 BLOCKSETSThe table provides an overview. At a glance,you can see specific research applications, unique attributes and technical specifications.Now you can enjoy greater flexibility whenimplementing control schemes. QUARC expands the possibilities for complex control design by:multiple operating Systems Support.QUARC is designed so that code could be generated for multipleoperating systems and hardware platforms while maintaining a common, seamless and easy-to-use interface. Simulink® models can run in real-time on a variety of targets - a target being acombination of operating system and processor for which QUARC generates code from a Simulink® diagram. Targets includeWindows® and QNX®. The number of targets QUARC supports is continually increasing.Support for Communications.The QUARC Stream API offers a flexible and protocol-independent communications framework. Conduct standard communication between QUARC models and more: between a QUARC model and an external third-party application (e.g., graphical userinterface) or even between two external third-party applications. The Stream API is independent of the development environment and can be used in C/C++, .NET, MATLAB®, LabVIEW TM , etc. The Stream API enables the communication between multiple real-time model over the internet. This could be used for distributed control, teleoperation, device interfacing, etc. The stream API natively supports the following protocols: TCP/IP, UDP, serial, shared memory , named pipes, ARCNET, and more.For demos and tutorials on QUARC’s communication capabilities request a free trial of QUARC at /QUARC.increasing number of Blocksets.The number of interfaces QUARC supports is continuallyincreasing over time to ensure easy integration with recent and popular third-party devices. Here are a few more examples: • Nintendo Wiimote• Q bot- An Unmanned Ground Vehicle based on iRobot Create®• Schunk Grippers• SparkFun Electronics SerAccelGet an updated list of interfaces supported by QUARC at /QUARC/blocksetsDESCRIPTIONUsing the KUKA Robot Blockset you can control any KUKA robot equipped with RSI (Robot SensorInterface) through the interactive Simulink® environment without tedious hand coding and cumbersome hardware interfacing.This blockset is not included in the standard QUARC license and is sold separately.The Point Grey Research (PGR) Blockset is used to acquire images from some of the Point Grey Research cameras. QUARC also provides image processing blocksets that can be used to find objects of a given color within a source image or convert images from one format to another.This blockset is included in the standard QUARC license.The Wiimote (Wii Remote) block reads the state of the Wiimote and outputs the button, acceleration, and Infra Red (IR) camera information. Using this blockset you can easily interface the Wiimote into the controller. This blockset is included in the standard QUARC license.The Novint Falcon Blockset is used for implementing control algorithms for the Falcon haptic device. Using the Blockset significantly simplifies the task of designing controllers for the Falcon.This blockset is included in the standard Quarc license.TEChNICAL CAPABILITIES AND SPECIFICATIONS• E nables the deployment of real-time executables with GUI • S upport for setting and getting values (e.g., knobs, displays, scopes, and other inputs and outputs)Supported devices:• SensAble PHANTOM Omni • SensAble PHANTOM Desktop • SensAble PHANTOM Premium• SensAble PHANTOM Premium 6DOF Data provided as output,• GPS position (latitude, longitude, altitude)• Number of visible satellites (dilution of precision data)• Accuracy information (dilution of precision – DOP)Typical accuracy 1-3m (WAAS)SUGGESTED RESEARCh APPLICATIONS• GUI Design (e.g. Cockpit)• Force feedback virtual reality• Haptically-enabled medical simulations • Teleoperation• Precise robotic manipulation• Image-based control and localization • Autonomous navigation and control • Fault detection• Image-based control and localization• Autonomous navigation and control • Image recognition • Mapping• Obstacle detection and avoidance • Visual servoing and tracking • Vision feedback• Teleoperation• Robotic manipulation• Force feedback virtual reality• Haptically enabled medical simulations • Teleoperation• Localization• Autonomous navigation and control• M ission reconfiguration(e.g., for Unmanned Vehicle Systems)• Fault recovery • Safety watchdogDYNAMICRECONFIGURATIONkUkA ROBOT ALTIASENSABLEPhANTOM ® SERIESVISUALIzATIONPGR CAMERASWII REMOTENOVINT FALCONGPSNATURAL POINTOPTITRACkThe PHANTOM® Blockset lets you control the series of PHANTOM® haptic devices via Simulink®. For added flexibility researchers can combine the Phantom Blockset and Visualization Blockset to enjoy seamless haptics rendering of virtual environments.This blockset is not included in the standard QUARC license and is sold separately.The Visualization Blockset creates 3D visualizations of simulations or actual hardware in real-time. By combining meshes and textures, you can create objects to seamlessly integrate high-performance graphics with real-time controllers. Comprehensive documentation and examples along with additional content are provided to help new users get started and master this blockset quickly. QUARC Visualization blockset is used in the Virtual Plant Simulation of selected Quanser plants such as SRVO2 and Active Suspension. This blockset is included in the standard QUARC license.• Y coordinates of up to four IR points detected by the wiimote IR camera. Valid values range from 0 to 767 inclusive.• A compatible Bluetooth device must be installed on the PC• A bility to command either Cartesian or joint velocity set points • A bility to measure the Cartesian positions, joint angles and joint torques • A bility to set either Cartesian or the joint minimum and maximum velocity limits • K UKA built-in safety checks are still enabled for safe operation• S end forces and torques in Cartesian or joint space • Read encoder values, position, and joint angles• Send commands in two different work spaces to the Phantom device • T he block outputs the gimbal angles of the device plus the values associated with the buttons and the 7 DOF available on the device (thumb-pad or scissors)• R emotely connect to a visualization server with multiple clients • N o interference with the operation of your real-time controller• Plugins provided for Blender and Autodesk’s 3ds Max 2008, 2009 and 2010• S et different material properties such as diffuse color, opacity , specular color, shininess, and emissivity.• T exture map support for png, jpg, tiff, and bmp.• X 3D support• C onfigurable mouse and keyboard interface for manually navigating around the environment • P erformance far exceeds TMW’s Virtual Reality toolbox• U p to 16 cameras can be connected and configured for single or multiple capture volumes • C apture areass up to 400 square feet • S ingle point tracking for up to 80 markers, or 10 rigid-body objects • T ypical calibration time is under 5 minutes • P osition accuracy on the order of mm under typical conditions• U SB 2.0 connectivity to ground station PC• U p to 100 fps tracking• S upport for Draganflyer 2 HI-COL and the FireflyMV • F rame rate selection from 7.5 fps to 60 fps • R esolutions from 640 x 480 to 1024 x 768, • C olor or grayscale, and custom image (subimage) sizes supported for faster framerates• C ontinuity of states between the model being switched-out and the model being switched-in, as a necessary condition to the system stability • S witching within one sampling interval, as a necessary condition to the system stability • D ynamic reconfiguration can be triggered either automatically (e.g., from a supervisory model) or manually• D ynamic Reconfiguration can be triggered either locally or remotely (i.e., on a remote target)The OptiTrack Blockset allows motion capture and tracking by using 3 or more synchronized infrared (IR) cameras that capture images containing reflective markers within a workspace. The blockset can be used to track either individual markers or rigid bodies. This Blockset makes it easy to conduct vision-based control experiments in real-time, especially for objects that were previously difficult to track, such as indoor autonomous vehicles.This blockset is not included in the standard QUARC license and is sold separately.The GPS Blockset allows GPS receivers to be easily accessed, thereby adding GPS localization to an experimentalplatform. This Blockset integrates with Ublox GPS devices as well as NMEA compliant GPS devices. This blockset is not included in the standard Quarc license and is sold separately.The Altia Design Blockset enables the user to interact with the real-time code from Altia GUIs. Unlike theMATLAB® GUIs, MATLAB® and Simulink® are not required when using Altia GUIs. This blockset gives you the tools you need to generate complete production systems without writing a single line of code. This blockset is included in the standard QUARC license.The Dynamic Reconfiguration Blockset lets you dynamically switch models on the target machine within a sampling interval. A running model may be replaced with another model while ensuring continuity of states between both with no interruptions (i.e. no skipped sample). For a demo and tutorial on the Dynamic Reconfiguration blockset request a free trial of QUARC at /QUARC.This blockset is not included in the standard QUARC license and is sold separately.Data provided as output:• P osition: X, Y, and Z position in Cartesian coordinates• Button information: Whether a button is currently pressed or not • F orce: X, Y, and Z forces applied by the Falcon end-effectormodel 1model 2* Please note that prices for blocksets may vary. For more information or to request a quote please contact sales@.• Payload 5 kg • Number of axes 6• Repeatability <±0.02 mm • Weight 28 kg• Mounting positions floor or ceiling • Controller KR C2sr • Max speed 8.2 m/sData provided as output:• X, Y, and Z axis accelerations • Button states • X coordinates of up to four IR points detected by the wiimote IR camera. Valid values range from 0 to 1023 inclusive• S upport for setting values (i.e. Meters and other outputs)• F eatures the Quanser Plot library for AltiaBLOCkSET* • Virtual reality rendering• Game and medical simulation• Simulation of mechanical components • Data fusion • R eal-time status displays of physical hardware• Virtual cockpit for aerial vehicles REQUEST A FREE 30 DAY TRIAL OF QUARC TODAY. VISIT /QUARC• Robotic manipulation • Teleoperation“The Host Computer System for the Challenging Environment Assessment Laboratory (CEAL) at the Toronto Rehabilitation Institute (TRI) was developed using Quanser’s QU ARC real-time software. The power of QU ARC, with Quanser’s engineering support, enabled TRI to create a flexible developmentenvironment for researchers to implement sophisticated real-time experiments, using a large-scale 11-ton, 6-DOF motion platform and high-performance audio-visual rendering systems”Dr. Geoff Fernie , Vice President, Toronto Rehabilitation Institute, CanadaQUARC ACCELERATES MEChATRONIC DEVELOPMENT WITh RAPID CONTROL PROTOTYPINGQUARC is a powerful Rapid Control Prototyping (RCP) platform that meets industrial research and development demands. This robust software helps manage the increasing complexity of controlengineers’ tasks and accelerates their ability to test control strategies. Generating countless iterations of Simulink® control designsbecomes almost effortless - a block diagram design is automatically implemented on the system and computed in real time, eliminating the need for manual coding. This RCP platform is adaptable to virtually any mechatronic interfaces and scalable for complex multi-input and multi-output systems.Affordable Industrial-Grade PerformanceFor a fraction of the cost of comparable systems, Research and Development engineers can convert a PC into a powerful platform for control system development and deployment. When combined with a Quanser Power Amplifier and a Quanser Data Acquisition Card, QUARC software provides an ideal rapid prototyping and hardware-in-the-loop development environment. QUARC is also compatible with a wide range of commercially available data acquisition cards, including National Instruments boards.QUARC evolved from experience with its predecessor WinCon.The Canadian Space Agency played an intricate role in defining and confirming many of the features of QUARC. This was done in the context of their micro-satellite development program on an early stage prototype. It has since been adopted by industries requiring the latest in performance and development flexibility such as the Aerospace, Defence and Medical device industries.QUARC capabilities and features are designed to optimize the RCP process. Below are a few samples of such features.• F lexible and extensible communications blocks configurablefor real-time TCP/IP, UDP, serial, shared memory and other protocols • P erformance Diagnostics • R TW Code Optimization support • M odularity and incremental builds via model referencing • C ontrol of thread priorities and CPU affinity • A synchronous execution (e.g., ideal for efficient communication) • R un any number of models on one target – or simultaneously on multiple targets • S elf-booting models for embedded targets• E xternal Hardware-In-the-Loop card and communication interfacing provided in C/C++, MATLAB®, LabVIEW TM , and .NET languages • M ultiprocessor (SMP) support, e.g., on a quad-core Windows target QUARC models can take advantage of all four cores. • S imulink® 3D Animation (formerly known as Virtual Reality) Toolbox support• A bility to interface with MATLAB® GUIs, LabVIEW TM panels, and Altia“We have been using Quanser’s QU ARC software to do real-time robot control. QU ARC enables fast and easy prototyping of control algorithms with hardware in the loop and has been an invaluable tool for algorithm development, simulation, and verification.”Paul Bosscher, Harris Corporation, USAChallenging environment AssessmentLaboratory (CeAL) will be one of the most advanced rehabilitation research facilities in the world.INNO VATE, RESEARCHAND EXPLOIT KNOWLEDGE.QU ANSERCONSULTING SOFTWAREHARDWAREPlantDAQAmplifierQUARC®: A POWERFUL ENGINEFOR ENGINEERING DEPARTMENTSThree issues challenge university engineering departments everywhere: teaching, research and budget. One solution resolves them: QUARC software from Quanser!For T eaching: Created by engineers for engineers, QUARC is an excellent low-cost rapid control prototyping system. Working seamlessly with Simulink®, QUARC helps students put ideas andtheory into practice sooner. Plus curriculum is offered to help educators focus on what matters most. With more hands-on learning, undergraduate and graduate students alike are captivated and motivated to study further.For Research: Originally designed for industrial use, QUARC is idealfor advanced research. From the precise control of surgical robots to unmanned air vehicles and beyond, ideas can be tested in real-time- even ideas that are out of this world. Small wonder our client list includes NASA, the Canadian Space Agency and thousands of universities and colleges. (Look on your left.)For your department’s budget: QUARC seamlessly integrates over80 Quanser experiments - from introductory to very advanced. These are modular by design and maximize efficiencies, offering multiple uses for one workstation. Academics ourselves, Quanser appreciates your need for careful budgeting. So QUARC is competitively pricedand available with single- or multiple-user licenses.Learn more at /QUARCProducts and/or services pictured and referred to herein and their accompanying specifications may be subject to change without notice. Products and/or services mentioned herein are trademarks or registered trademarks of Quanser Inc. and/or its affiliates. Other product and company names mentioned herein are trademarks or registered trademarks of their respective owners.©2010 Quanser Inc. All rights reserved. Rev 2.0。
WABCO威伯科整车气路1(1998)
Systems And Components In Commercial Vehicles Edition 1998© Copyright WABCO 1998WABCOFahrzeugbremsenA Division ofWABCO Standard GmbHThe right of amendment is reservedTable of ContentsPage Operation of Air Braking Systems (4)1. MotorVehiclesBraking System (6)Components of the Motor Vehicle’s Braking System (7)2. TrailersBraking System (62)Equipment For Trailer Braking Systems (64)3.Anti-Lock Braking System (ABS) (79)4.Sustained-Action Braking Systems On Motor Vehicles (89)5. EBS - Elektronisch geregeltes Bremssystem (93)6.Air Suspension Systems and ECAS(Electronically Controlled Air Suspension) (105)7.Clutch Servo (117)8.Air Braking Systems InAgricultural Vehicles (121)9.ETS-Elektronic Door Control SystemFor Motor Coaches (131)10.Installation Of Pipes And Screw Unions (139)11.Index (151)Operation of Air Braking Systems1. Compressed Air Supply The compressed air supplied by the com-pressor (1) flows to the air dryer (3) via the unloader (2) which automatically con-trols the pressure within the system with-in a range of between 7.2 and 8.1 bar, for instance. In the air dryer, the water va-pour in the air is extracted and expelled through the air dryer’s vent. The dried air then flows to the quadruple-circuit pro-tection valve (4) which, if one or several circuits are defective, secures the intact circuits against any loss in pressure. Within the service braking circuits I and II, the air supply from the reservoirs (6 and 7) flows to the brake valve (15). In Circuit III the air supply from the reservoir (5) flows through the 2/2-way valve which is integrated in the trailer control valve (17) to the automatic hose coupling (11) and on to the check valve (13), the hand brake valve (16) and the relay valve (20) into the spring-loaded portion of the Tris-top spring brake actuators (19). Circuit IV supplies air to any ancillary consumers, in this case an exhaust brake.The trailer’s braking system receives compressed air through the hose cou-pling (11) with its supply hose connected. This air then passes the line filter (25)and the relay emergency valve (27) be-fore reaching the reservoir (28) and alsoflows to the supply ports of the ABS relayvalves (38).2. Operation:2.1 Service Braking SystemWhen the brake valve (15) is actuated,compressed air flows via the ABS sole-noid control valve (39) into the brakechambers (14) of the front axle and to theload-sensing valve (18). This valve re-verses and the air flows via the ABS so-lenoid control valve (40) into the servicebrake portion (brake chambers) of theTristop spring brake actuators (19). Thepressure in the brake cylinders generat-ing the force required for the wheel brakedepends on the amount of force appliedto the brake valve, and on the load car-ried on the vehicle. This brake pressureis controlled by the load-sensing valve(18) which is connected to the rear axleby means of a linkage. Any change in thedistance between the vehicle’s chassisand its axle caused by loading or unload-ing the vehicle causes the brake pres-sure to be continuously adjusted. At thesame time, via a pilot line, the load-emptyvalve integrated in the brake valve is af-fected by the load-sensing valve. Thusthe brake pressure on the front axle isalso adjusted to the load carried on thevehicle (mostly on lorries).The trailer control valve (17) actuated bythe two service braking circuits pressuriz-es the pilot connection of the relay emer-gency valve (27) after passing the hosecoupling (12) and the connecting “con-trol“ hose. The air supply from the air res-ervoir (28) is thus allowed to passthrough the relay-emergency valve, thetrailer release valve (32), the adaptervalve (33) and on to the load-sensingvalve (34) and the ABS relay valve (37).The relay valve (37) is actuated by theload-sensing valve (34) and the com-pressed air flows to the brake chambers(29) on the front axle. The ABS relayvalves (38) are actuated by the load-sensing valve (35), and the compressedair is allowed to pass to the brake cham-bers (30 and 31). The service pressureon the trailer, which is similar to the out-put pressure from the towing vehicle, isautomatically adjusted by the load-sens-ing valves (34 and 35) for the load carriedon the trailer. In order to prevent overb-raking of the wheel brake on the frontaxle in the partial-braking range, theservice pressure is reduced by the adapt-er valve (33). The ABS relay valves (onthe trailer) and the ABS solenoid control valves (on the towing vehicle) are used to control (pressure increase, pressure hold, pressure release) the brake cylin-ders. If these valves are activated by the ABS ECU (36 or 41), this control process is achieved regardless of the pressure al-lowed to pass by the brake valve or the relay emergency valve.When they are not needed (solenoids are dead), the valves operate as relay valves and achieve a faster increase or de-crease of the pressure for the brake cyl-inders.2.2Parking Braking System When the hand brake valve (16) is actu-ated and locked, the spring-loaded por-tions of the Tristop spring brake actua-tors (19) are exhausted fully. The force needed for the wheel brake is now pro-vided by the heavily preloaded springs of the Tristop spring brake actuators. At the same time, the pressure in the line lead-ing from the hand brake valve (16) to the trailer control valve (17) is reduced. Brak-ing of the trailer commences by the pres-sure increasing in the connecting ‘supply’hose. Since the guideline of the Council of the European Communities (RREG) that a tractor-trailer combination must be held by the motor vehicle alone, the pres-sure in the trailer’s braking system can bereleased by moving the hand brake leverinto its ‘control’ position. This permits theparking braking system to be examinedas to whether it fulfills the provisions ofthe RREG.2.3 Auxiliary Braking SystemDue to sensitive graduation of the handbrake valve (16) the lorry can be brakedby means of the spring-loaded portionseven if the service braking systems I andII have failed. The brake force for thewheel brake is produced by the force ofthe preloaded springs of the Tristopspring brake actuators (19) as describedunder ‘Parking Braking System’ althoughthe spring-loaded portions are not ex-hausted fully but only to the extent re-quired for the braking performance.3. Automatic Braking of theTrailerIn the event of the connecting ‘supply’line breaking, the pressure will drop rap-idly and the relay emergency valve (27)will cause full application of the trailer’sbrakes. In the event of the connecting‘control’ line breaking, the 2/2-way valveintegrated in the trailer control valve (17)will, when the service braking system isactuated, throttle the passage of the sup-ply line leading to the hose coupling (11)to such an extent that the rupture of thesupply line causes a rapid drop in pres-sure in the supply line and the relayemergency valve (27) causes the trailerto be braked automatically within the le-gally stipulated time of no more than 2seconds. The check valve (13) securesthe parking braking system against anyinadvertent actuation if the pressuredrops in the supply line leading to thetrailer.4. ABS ComponentsThe motor vehicle usually has three tell-tale lamps (ASR having one additionallamp) fitted for indicating functions andfor continuously monitoring the system. Italso has a relay, an information moduleand an ABS socket (24).After actuating the driving switch, the yel-low telltale lamp will come on if the trailerhas no ABS or if the connection has notbeen established. The red lamp will go offwhen the vehicle exceeds a speed of ap-prox. 7 k.p.h. and the safety circuit of theABS electronics has not detected an er-ror.Air braking system with ABS/ASR (4S/4M)Legend:Pos.1Compressor2Air dryer with combined unloader3Four circuit protection valve 4Air reservoir 5Clamps6Test coupling 7Drain valve 8Check valve9Brake valve with integralauto load proportioning valve 10Hand control valve with trailer control 11Relay valve 12Piston cylinder 13Brake chamber14ASR-Control cylinder153/2 Solenoid valve 16Tristop-Brake actuator 17Quick release valve 18Load sensing valve 19Knuckle joint20Trailer control valve 21Hose coupling, supply 22Hose coupling, control 23Two-Way valve 24ABS Warning lamp 25ABS Info lamp 26ABS-socket27Sensor extension cable 28Solenoid cable 29Socket30Sensor braket31Sensor with cable 32Pole wheel33ABS-Solenoid valve 34Electronic control unit 35Info module 36Pressure switch 37Proportional valve383/2 Directional control valve12381234,5714379171333282729,3031,3224253435181915626112316212220108361.Components Of The Motor Vehicle’s Braking SystemAir Intake Filters1.Moist Air FilterPurpose:To prevent impurities from the air getting into the compressor (by using suction fil-ters) or into the vents of compressed air equipment (by using vent filters); they also serve to muffle the noise caused by the intake of air or by blowing it off.Operation:Moist air filters (for normal operating con-ditions). The air is taken in through an opening in the cap, flows through the fil-ter medium where it is cleaned and then flows on to the air intake of the compres-sor.Oil Bath Air CleanerOperation:Oil bath air cleaner (for air containing a large mount of dust)The air is taken in through the sieve plate below the cap and the central pipe, and then passed across the surface of the oil where any dust particles can settle. From the surface of the oil, the air is pushed upward, flows through a filter package which retains any impurities which may still be contained in the air and any oil particles carried over before reaching the air intake of the compressor.Moist Air Filter432 600 . . . 0 to 432 607 . . . 0Oil Bath Air Cleaner432 693 . . . 0 to 432 699 . . . 0Purpose:Production of compressed air for road vehicles and static systems. Operation:The pulley on the end of the crankshaft is rotated by a vee-belt driven off the vehi-cle’s engine. This rotation causes the connecting rods to to move the pistons. As the piston travels downwards clean air from either the engine air cleaner or the moist air filter (or alternatively an oil bath air cleaner) is drawn in trough the inlet valve. As the piston moves up-wards, the inlet valve closes, and air is pumped through the delivery valve into the the reservoir.The type of lubrication depends on the construction of the compressor, and can be splash or pressure fed.Single Cylinder Air Compressor 411 1 . . . . . 0 and 911 . . .. . . 0Twin CylinderAir Compressor 411 5 . . . . . 0 and 911 5 . . . . . 0Air Cleaner1.Purpose:To clean the air delivered by the com-pressor and to precipitate the humidity it contains.Operation:The air entering at port 1 flows through annular gap A into Chamber B. As it passes through the gap A, the air cools and some of the water vapour it contains will condensate. The air then flows through the filter (a) to Port 2.At the same time, the pressure in Cham-ber B opens the inlet (3) of the valve body (d) and the condensate runs through the filter (f) into Chamber C. As the pressure in Chamber B falls, the inlet(3) closes and the outlet (b) opens. The condensate is now blown outside by the pressure in Chamber C. When the pres-sures in Chambers B and C are bal-anced, outlet (b) closes.Pin (C) can be used to check whether the automatic drain valve is working proper-ly.Air Cleaner 432 511 . . . 0Air Dryer432 410 . . . 0 and432 420 . . . 0Purpose:Drying of the compressed air supplied by the compressor by extracting the mois-ture present in the air. This is effected by a progress of cold regenerated adsorp-tion drying where the air compressed by the compressor is led through granulates (adsorbens) capable of adsorbing the moisture contained in the air. Operation:Variant 1 (Control Via Separate Un-loader Valve 432 420 ... 0)In the feed phase, the compressed air supplied by the compressor flows via Port 1 into Chamber A. Here the conden-sate caused by the reduction in tempera-ture will collect, reaching Outlet (e) via Duct C.Via Fine Filter (g) integrated in the car-tridge, and via Annulus (h), the air will reach the upper side of Desiccant Car-trige (b), being cooled in the process, and further condensate will precipitate. Moisture is extracted from the air as it passes through Granulate (a) this mois-ture is absorbed by the surface and the fine ducts [diameter: 4 x 106 m = 4Å(Angström)] of the extremely porousgranulate.Since the oil molecules are more than 4Åin size they cannot enter the fine ducts ofthe granulates. This makes the granulaterobust. The steam portion of the oil is notadsorbed. The dried air reaches the airreservoirs via Check Valve (c) and Port21. At the same time, the dried air alsoreaches the re-generation reservoir viathrottling port and Port 22.When cut-out pressure in the system isreached, Chamber B is pressurized fromthe unloader valve via Port 4. Piston (d)moves downwards, opening Outlet (e).The air, the condensate plus any impuri-ties and oil carbon from Chamber A willbe emitted via Duct C and Outlet (e).When cut-in pressure at the unloadervalve is reached, Chamber B is ventedonce again. Outlet (e) closes and the dry-ing process will commence as describedabove.Any malfunction due to icing in extremeconditions in the area of Piston (d) canbe prevented by fitting a Heating Car-tridge (f) which will switch on at tempera-tures below 6°C and switch off againwhen the temperature reaches approx.30°C.Variant 2 (Control Via Integral Unload-er Valve 432 410 ... 0)The process of drying the air is as de-scribed under Variant 1 In this version,however, the cut-out pressure will reachChamber D via Bore (l), acting on Dia-phragm (m). After overcoming the springresistance, Inlet (n) will open, and Piston(d), now pressurized, will open Outlet (e).The air supplied by the compressor willnow be emitted via Chamber A, Duct Cand Vent 3. Piston (d) also acts as apressure relief valve. In the event of anyexcess pressure, Piston (d) will auto-matically open Outlet (e). If, due to airconsumption, the supply pressure in thesystem falls to a value below cut-in pres-sure, Inlet (n) will close and the pressurefrom Chamber B will be reduced via theunloader valve's vent. Outlet (e) willclose and the drying process will com-mence once again.432 420 432 410Air Dryer 1.Air Dryer With Return-Flow Limiting Valve432 413 . . . 0 and432 415 . . . 0The single-chamber air dryers from this series have an integrated return-flow lim-iting valve which permits the required amount of air to be taken from the main reservoir provided the multiple-circuit protection valve permits a return flow. Thus no separate regenerating reservoir is required.Operation:Variant 1 (Control Via Separate Un-loader Valve432 413 ... 0)In the delivery phase the compressed air supplied by the compressor flows through Port 1, opens the check valve (i) and flows into Chamber A. Due to the drop in temperature, condensation water collects there which reaches the outlet (e) through Duct C.The air is dried as described under 432 420. At the same time, dried air also flows into Chamber E, pressurizing dia-phragm (o). This arches towards the right, releasing the passage between Chambers E and G via Throttling Port (s). The air supply also reaches Chamber H via Filter (l), pressurizing Valve (q). Once the force of the pressure spring, preset by means of Screw (r), has been over-come, Valve (q) is lifted. The air supplywill now reach Chamber F, acting on theother side of the diaphragm (o) with aslightly lower pressure in keeping withthe retention of Valve (q).When the cut-off pressure within the sys-tem has been reached, Chamber B ispressurized by the unloader via Port 4.The piston (d) moves downwards andopens the outlet (e). The check valve (i)closes the passage to Port 1 and the airfrom Chamber A flows through Duct Cand is emitted to atmosphere at the outlet(e).Due to the drop in pressure in ChamberG, the check valve (c) closes. The air tobe regenerated is now taken from the airreservoirs, which is why a multiple-circuitprotection valve must permit its returnflow. The air supply at Port 21 flowsthrough Chamber E, the throttling port (s)where it expands, on into Chamber Gand thus to the underside of the granu-late cartridge (b).As it passes through the granulate car-tridge (b) in an upward direction, the hu-midity on the surface of the granulate (a)is taken up by the air and emitted to at-mosphere at Vent 3 after passing Duct Cand the opened outlet (e). The return flowis completed when the pressure on theleft of the diaphragm (q) has been re-duced to a point where it reaches its clos-ing position.When the cut-in pressure at the unloaderis reached, the pressure in Chamber B isreduced once again. The outlet (e) clos-es and the drying process starts again asdescribed above. Outlet 31 also has asafety valve for the pressure side.Variant 2 (Control Via Integral Unload-er Valve 432 415 ... 0)In this variant, the cut-off pressure reach-es Chamber J via the connecting holeinto Chamber J and acts on the dia-phragm (m). After the spring force hasbeen overcome, the inlet (n) opens andthe piston (d) which is now pressurizedopens the outlet (e).The air delivered by the compressor nowflows through Chamber A, Duct C and isemitted to atmosphere at Vent 3. The pis-ton (d) at the same time acts as a popvalve. When the pressure is excessive,the piston (d) automatically opens theoutlet (e).If air consumption causes the supplypressure within the system to fall belowthe cut-in pressure, the inlet (n) closesand the pressure from Chamber B is re-duced through the vent of the unloadervalve. The outlet (e) closes and the dry-ing process begins again.432 413 432 415Twin Chamber Air Dryer 432 431 . . . 0 and432 432 . . . 0Operation:a) Control without Integral Un-loader ValveThe compressed air supplied by the compressor flows to Bore E via Port 1. Due to a reduction in temperature, con-densate may form at Bore E, reaching Idling Control Valve (m) via Bore L. From Bore E, the compressed air will pass Valve (k), enter Chamber B, and reach the upper side of Desiccant Cartridge (c) via Fine Filter (e) integrated into the car-tridge, and via Annulus A.Through Sieve Plate (a), the pre-cleaned compressed air will pass downwards through Granulate (b) sewn into a filter bag in Cartridge (c), reaching Bore G via Sieve Plate (d) and Check Valve (f).As the air passes through Granulate (b), the inherent moisture is retained by the extremely porous granulate. From Bore G, the compressed air reaches the air reservoirs through Check Valve (g) and via Port 2.Through the throttling port of Valves (fand p) designed according to the sweptvolume of the compressor used, part ofthe dried compressed air from Bore Gwill reach the underside of Cartridge (s),passing Granulate (r) in an upward direc-tion (backflush). In this process, themoisture adhering to the fine ducts of theextremely porous Granulate (r) is takenup by the dried air and reaches Vent 3via Annulus K, Chamber H and past theopen rear side of Valve (o).The additional Charging Valve (h) en-sures that Control Valves (k and o) donot switch over when the system is filledinitially. Valve (h) will not open until asupply pressure of > 5 bar has beenreached at Port 2, permitting com-pressed air to reach Chamber C. If thetimeswitch element integrated in the so-lenoid valve then opens the current sup-ply to Trip Coil (j), Armature (i) will be at-tracted. Compressed air from ChamberC will now flow into ChamberD and, viaBore F, into Chamber M, moving the con-trol valves against the spring force intotheir end positions on the left.The passage from Bore E to Chamber Bis closed. The compressed air present inChamber B will now be emitted at Port 3after passing by the open rear side ofControl Valve (k) and going through BoreN. Check Valve (g) will close and thepressure in the system continues to beensured. As a consequence of the pres-sure reduction in Chamber B, CheckValve (f) will also close.The compressed air supplied by thecompressor will now flow from Bore Ethrough Chamber H, Annulus K andthrough Granulate (r) of Cartridge (s).The drying process of the compressedair is as described before. After Valve (p)and Check Valve (g) have opened, thedried air reaches the reservoirs via Port2. Through the throttling port of Valve (f),dried air reaches the underside of Gran-ulate (b), causing a back-flushing proc-ess to take place here, too.After approx. 1 minute, the time-switchelement will break the current supply tothe trip coil. Armature (i) will close thepassage from Chanber C, opening thevent, thus reducing the pressure inChambers D and M. Through the springforce and the pressure in Bore G, thecontrol valves are returned to their endpositions on the right. Control Valve (o)will close the passage to Chamber H,and Control Valve (k) will open the pas-432 431Air Dryer 1.sage to Chamber B. The compressed air supplied by the compressor is now again fed into Granulate (b), and the drying process will commence as described be-fore, with alternating cartridges continu-ing to be used at one-minute intervals. When the unloader valve switches to idling once the input cut-out pressure has been reached, pressure is being fed in at Port 4, pressurizing, and moving down-wards, Piston (m), opening the idling control valve. Any condensate and impu-rities will be emitted together with the air supplied in the idling phase via Vent 3. When the unloader valve switches to load, Port 4 is vented and the idling con-trol valve closes the passage to Vent 3. Any malfunction due to icing in extreme conditions in the area of Piston (m) can be prevented by fitting a Heating Car-tridge (l) which will switch on at tempera-tures below 6°C and switch off again when the temperature reaches approx. 30°C.b) Control Via Integral UnloaderValveThe air is dried as described under a). The pressure building up at Port 2 when the system is being filled is also present in Chamber P, pressurizing the under-side of Diaphragm (t). As soon as theforce resulting therefrom is larger thanthe force of Pressure Spring (n), Dia-phragm (t) will arch, taking with it Piston(q). This opens Inlet (u), and Piston (m),now pressurized, is moved downward,opening the idling control valve. Any con-densate and impurities will be emitted to-gether with the air supplied in the idlingphase via Vent 3. The compressor willcontinue to run idle until the pressurewithin the system has fallen to a valuebelow the unloader valve's cut-in pres-sure. The pressure in Chamber P belowDiaphragm (t) will fall simultaneously.Pressure Spring (n) will move Piston (q)and Diaphragm (t) back to their originalpositions. Outlet (u) will close, and thepressure from Chamber O will be re-duced via the vent of the unloader valve.The idling control valve with Piston (m)will close once again. The compressedair will now again flow into Bore E andreach the air reservoirs via Port 2 afterbeing dried in Desiccant Containers (b orr). The system is subsequently filledonce again up to the cut-out pressure ofthe unloader valve.Application:Depending on the respective application,WABCO provides Single and TwinChamber Air Dryers.The decision of whether to use a Singleor a Twin Chamber Air Dryer will dependon the compressor's swept volume andon its duty cycle.Single Chamber Air Dryerscan normally be used for applications upto a swept volume of ≈ 500 litres/minuteand a duty cycle of up to ≈ 50%. Any de-viations of these standard values shouldbe tested in road-test runs.Twin Chamber Air Drierscover the area > 500 litres/minute and >50% up to 100% duty cycle. Swept vol-umes in excess of 1000 litres/ minuteshould be tested in road-test runs 432 432Purpose:To automatically control the operating pressure in an air braking system and to protect its pipes and valves from contam-ination. Depending on the variant used, it also serves to control a downstream anti-freeze pump or single chamber air dryer. Operation:a)UnloaderThe compressed air supplied by the compressor flows via Port 1 and Filter (g) to Chamber B. When Check Valve (e) has opened, it flows through the line leading from Port 21 to the air reservoirs and to Chamber E. Port 22 is intended for controlling a downstream anti-freeze pump.Pressure builds up in Chamber E, acting the underside of Diaphragm (c). As soon as that pressure is greater than the force of Compression Spring (b), preset by means of Screw (a), diaphragm (c) will arch upward, taking with it Piston (m). Outlet (l) closes and Inlet (d) opens, per-mitting the compressed air to pass from Chamber E to Chamber C, forcing Piston (k) downwards against the force of Com-pression Spring (h). Outlet (i) opens and the compressed air supplied by the com-pressor is released to atmosphere via Exhaust 3. The fall in pressure in Cham-ber B closes Check Valve (e), thus se-curing the pressure in the system.The compressor will now continue to idleuntil the pressure within the system fallsbelow the Unloader’s cut-in pressure.The pressure in Chamber E below Dia-phragm (c) continues to fall. This causesthe force of Compression Spring (b) topush the diaphragm, together with Piston(m), downwards. Inlet (d) closes, Outlet(l) opens and the air from Chamber C isreleased to atmosphere at Exhaust 3 af-ter passing Chamber F and a connectinghole. Compression Spring (h) forces upPiston (k) and outlet (i) is closed. The airsupplied by the compressor now flowsinto Chamber B, passing Filter (g), andopens Check Valve (e). The system isonce again being filled until the Unload-er’s cut-off pressure has been reached.b) Unloader with Pilot Connec-tion 4 and Port 23This type of Unloader differs from thetype described under a) merely in theway the cut-off pressure is controlled.The cut-off pressure is not taken from in-side the unloader but from the supply linedownstream from the air dryer. The pas-sage from Chamber B to Chamber E isclosed, and there is no Check Valve (e).Via Port 4 and Chamber A, the air fromthe reservoir flows to Chamber E, actingon Diaphragm (c). After that it continuesto operate as described under a). Thepassage between Chambers C and D isopen, permitting pilot pressure fromChamber C to be taken at Port 23 to ac-tuate the single chamber air dryer.c) Tyre inflation connectionAfter removing the protective cap, thetyre inflation hose is fastened by meansof a union nut moving Pin (f). The pas-sage between Chamber B and Port 21 isclosed. The air supplied by the compres-sor now flows from Chamber B to the tyreinflation hose, passing Pin (f). In theevent of the pressure in the system ex-ceeding 12+2 bar or 20 bar respective-ly during this process, Piston (k) which isdesigned to act as a safety valve willopen Outlet (i) and the pressure is re-leased to atmosphere via Exhaust 3.Before using the tyre inflation facility, thereservoir pressure must be reduced to avalue below the Unloader’s cut-in pres-sure since no air can be extracted whilstthe compressor is running idle12–Combined Unloader975 303 . . . 0。
长安福特常用缩写词

长安福特常用缩写词(CP)Confirmation Prototype确认样车Final Status最终状态(J1)Job 1整车投产(PT)P/T Design Complete动力传动系统设计结束PT(P/T)Power Train动力传动系统(ST)Surface Transfer表面参数传递Change Cut-Off更改完成Launch Readiness投产准备就绪Launch Sign-Off投产验收Program Approval项目批准Proportions & Hardpoints比例与固定点Product Readiness产品准备就绪Pre Milestone 1SI前里程碑1Pre Milestone 2SI前里程碑2Strategic Confirmation策略确认Strategic Intent策略意向Strategic Planning策略计划(SP)Structural Prototype样车结构(TTO)Tool Try-Out工装设备试运行Global 8D Eight disciplinary ActionsG8D(福特公司解决问题的标准方法)14DMore Detailed than Global 8D (used to containand resolve stop-shipment/recall problems)更详细的细节(包括并解决停止运货/召回问题)1MIS One Month in Service投入使用1个月1PP First Production Proveout第一次试生产2PP Second Production Proveout第二次试生产3MIS Three Months in Service投入使用3个月4P Production Process Proveout Program生产程序验证项目AAA American Automobile Association美国汽车工业联合会ABS Affordable Business Structure可承受商业结构ABS Anti skid brake system防抱死制动系统AIAG Automotive Industry Action Group 机动车工业行动小组AIC Accelerated Implementation Centre快速实施中心AIM Automated Issues Matrix问题结构图AIMS Automated Issues Matrix System问题结构图系统AME Advanced Manufacturing Engineering先进制造工艺AMPPE Advanced Manufacturing Pre-Program Engineering 先进项目前制造工艺ANOVA Analysis of Variance多样性分析AP Attribute Prototype设计样车APEAL Automotive Performance Execution and Layout机动车性能实施与规划APQP Advanced Product Quality Planning先进产品质量计划ASQ American Society for Quality美国质量协会AV Appraiser Variation评估者的多样性AVT Advance Vehicle Technology先进车辆技术AWS Analytical Warranty System分析性的保修系统AXOD Automatic Transaxle Overdrive Transmission自动变速驱动桥超速档传动系B&ABody & Assembly Operations (New Term: VehicleOperations)车身与组装操作(新术语:车辆操作)BCG Business Consumer Group消费者工作组BIC Best in Class等级中的最佳BIS Body Shop Information System车身工作间信息系统BLI Business Leadership Initiative领导层初始意向BOM Bill OfMaterials零件清单BTB Bumper-to-Bumper保险杠到保险杠BTS Build-To-Schedule按日程建造BUR Business Unit Review业务小组讨论CAS Capacity Analysis Sheet能力分析表C/E Cause & Effect成因及影响CA Customer Attribute消费者特性CAD Computer Aided Design计算机辅助设计CAE Computer Aided Engineering计算机辅助工程CAP Corrective Action Plan纠正行动计划CBG Consumer Business Group消费者业务小组CB Continuous Build连续性生产CC Critical Characteristic评价特性CC Courtesy Copy抄送CC Carbon Copy副本CCC Customer Concern Classification客户问题分类CCC China compulsory certification中国强制认证CDS Component Design Specification零件设计参数CET Campaignable Events Team召回情况小组CETs Common External Tariff普通关税CETP Corporate Engineering Test Procedures公司工程测试程序CFR Constant Failure Rate连续故障率CHFCIM Computer Integrated Manufacturing计算机综合制造CIWG Continuous Improvement Work Group持续改进工作组CL Centerline中心线CMM Coordinate Measuring Machine协调测量设备CMMS Common Material Management System通用材料管理系统CMMS3Common Manufacturing Management System-3通用制造管理系统-3Code X Pre-build focusing on exterior components制造前关注的外部零件Code Y Pre-build focusing on interior components制造前关注的内部零件CP Cost plan(马自达用语)由ECN引起的价格变动估计CP Common Position通用位置CP Confirmation prototype确认样车(FORD 时间节点)C p Relates the allowable spread of thespecification limits to the measure of theactual variation of the process.将参数限制允许限度下的展开与程序实际多样性联系起来CPE Chief Program Engineer首席项目工程师C pk Measures the process variation with respect tothe allowable specification, and takes intoaccount the location of the process average测量程序的多样性并将其考虑到程序平均性的位置中CPU Cost Per Unit单位成本CQDC Corporate Quality Development Center公司质量开发中心CQIS Common Quality Indicator System一般质量指标系统CR Concern Responses问题回复CRT Component Review Team零件讨论组CSA Corporate Security Administrator公司安全管理员CSI Customer Service Index客户服务指数DCO Duty Cycle Output责任循环结果DCP Dynamic Control Planning动态控制计划DDL Direct Data Link直接数据连接Df Degrees of Freedom自由度DFA Design for Assembly总成设计DFM Design for Manufacturability制造能力设计DFMEA Design Failure Mode Effects Analysis故障模式影响分析设计DFR Decreasing Failure Rate故障下降率DMA Database Maintenance Administrator数据库维护管理人员DOE Design of Experiment试验设计DOM Dealer Operations Manager经销商业务经理DP Design Parameters参数设计DQR Durability Quality and Reliability耐久性质量与可靠性DTD Dock to Dock码头至码头DTD Design to Delivery设计到交付DCV Design Confirmation Vehicle设计确认车DV Design Verification设计验证DVM Design Verification Method设计验证方式DVP Design Verification Plan设计验证计划Design Verification Process and Production设计验证程序和产品验证DVP&PVValidationDVP&R Design Verification Plan & Report设计验证计划和结果DVPR Design Verification & Product Reliability设计验证和产品可靠性DVPV Design Verification and Process Verification设计验证和程序验证EAO European Automotive Operations欧洲机动车协会EASI Engineering And Supply Information工程和供应信息ECAR Electronic Connector Acceptability Rating电子连接接受比率EDI Electronic Data Interchange电子数据交换EESE Electrical and Electronic Systems Engineering电力及电子系统工程EMM Expanded Memory Manager扩展内存管理器EMS Environmental Management System环境管理系统EOL End of Line线的端点EQI Extraordinary Quality Initiative特别初始质量ES Engineering Specifications工程参数ESI Early Supplier Involvement早期供应商参与ESP Extended Service Plan延期服务计划ESTA Early Sourcing Target Agreement早期选点目标协议ESWP Early Sourcing Work Plan早期选点工作计划EV Equipment Variation设备变更F&T Facility & Tooling工装设备FACT Facilitation and Certification Training简易化及认证培训FASS Field Action/Stop Shipment区域行动/停止运货区域行动/停止运货(优先使用缩FA/SS Field Action/Stop Shipment (Preferred Acronym)写)FAO Ford Automotive Operations福特机动车协会FAP Ford Automotive Procedure福特机动车程序FAQ Frequently Asked Questions常见问答FCPA Ford Consumer Product Audit福特客户产品审核FCSD Ford Customer Service Division福特客户售后服务分枝机构FDVS Ford Design Verification System福特设计验证系统FER Fresh Eyes Review其它行业人员论证FER Final Engineering Review最终工程论证FEU Field Evaluation Unit区域评估组FIFO First in First Out先进先出FMEA Failure Mode Effects Analysis故障模式影响分析FMVSS Federal Motor Vehicle Safety Standards美国联邦机动车安全标准FPDS Ford Product Development System福特产品开发系统FPS Ford Production System福特生产系统FPSI Ford Production System Institute福特产品系统学院FPS IT Ford Production System Information Technology福特产品系统信息技术FOB Ford of Britain福特英国FQRs Frequent Quality Rejects经常性质量不合格品FR Functional Requirements功能要求FAO (福特机动车运作) 可靠性指FRG FAO Reliability Guide导FS Final Sign-off最终验收FSIC Ford System Integration Council福特系统综合委员会FSN Ford Supplier Network福特供应商网络FSS Full Service Suppliers全方位服务供应商FTDC Fairlane Training and Development Center培训和发展中心FTEP Ford Technical Educational Program福特技术培训项目FTT First Time Through首次通过FUNC-APPRV Functional Approvals功能批准FVEP Finished Vehicle Evaluation Program下线车辆评估项目GAP Global Architecture Process全球建筑设计程序GC Global Craftsmanship全球技术工艺GCARS Global Craftsmanship Attribute Rating System全球技术特性评分系统GCEQ Global Core Engineering Quality全球核心工程质量GEM Generic Electronic Module通用电子模块GIS1Global Information Standards全球信息标准Global Prototype Inventory Requisition andGPIRS全球样车库存及控制安排SchedulingGPP Global Parts Pricing全球零件定价GQRS Global Quality Research System全球质量调查系统GRC UN-ECE Group des Raporteurs de Ceintures欧盟 ECE 安全带规划小组GRC Government Regulations Coordinator政府法规协调员GR&R Gage Repeatability and Reproducibility量具重复性和再现性GRVW Gross Vehicle Weight车辆质量GSDB Global Supplier Database全球供应商数据库GSSM Global Sourcing Stakeholders Meeting全球选点股东大会GYR Green-Yellow-Red绿-黄-红HB Homologation Build法规车制造HI High-Impact重大影响HIC High-Impact Characteristics重大影响特性HR Human Resources人力资源HTFB Hard Tooled Functional Build成形机功能建造HVAC Heating Ventilating and Air Conditioning加热通风和空调ICA Interim Containment Action过渡性补救措施ICCD Intensified Customer Concern Database强化的客户问题数据库ICCD CRSIntensified Customer Concern Database ConcernResolution Specialist 强化的客户问题数据库解决问题专员IE Industrial Engineer产业工程师IFR Increasing Failure Rate 故障率增长ILVS In-Line Vehicle Sequencing车辆顺序IM Industrial Materials工业材料IP Instrument Panel仪表板IPD In Plant Date进厂日IQ Incoming Quality进货质量IQS2Initial Quality Study初始质量研究IR Internal Reject内部不合格品ISO International Organization for Standardization国际标准化组织ISPC In-Station Process Controls过程质量控制JIT Just in Time及时JPH Jobs Per Hour每小时工作量JSA Job Safety Analysis工作安全分析PSW (零件质量合格验收) 未做好KKK PSW not ready for inspection检测准备KLT Key Life Test关键使用寿命测试KO Kickoff起动LCL Lower Control Limit低控制限值LDEM Lean Design Evaluation Matrix设计评估表LOA Letter of Agreement协议书LP&T Launch Planning & Training投产计划和培训LR Launch Readiness投产准备就绪LRR Launch Readiness Review投产准备就绪论证LS Launch Sign-Off投产验收LSL Lower Specification Limit低参数限制LTDB Light Truck Data Base轻型卡车数据库MBJ1Months Before Job One Job1(投产)前1个月MBO Manufacturing Business Office制造办公室ME Manufacturing Engineering制造工程MIS Months in Service使用中的月份MMSA Material Management System Assessment物料管理系统评定MP Mass Production批量生产MP&L Materials, Planning and Logistics材料、计划与物流MPPS Manufacturing Process Planning System制造程序计划系统MOD Module模块MRB Material Review Board物料论证板MRD Material Required Date物料要求到厂日MS Material Specifications物料参数MS3(MSIII)Material Supply Version III物料供应(第三版)MTC Manage the Change管理变更MY Model Year年度车型NAAO North American Automotive Operations北美汽车工业协会NFM Noise Factor Management噪声管理NIST National Institute of Standards and Testing全国标准和测试协会NMPDC New Model Program Development Center新车型项目开发中心Nova C New Overall Vehicle Audit新车总评审NPPR New Program Product Review供应商技术支持NTEI New Tooled End Items新工具加工成品NVH Noise, Vibration, Harshness噪声、振动、操纵平顺性OCM Operating Committee Meeting工作委员会会议OEE Overall Equipment Efficiency总体设备效率OEM Original Equipment Manufacturer设备最初制造厂ONP Owner Notification Program车主告知程序OS Operator Safety操作者安全OTG Open to Go可进行P Diagrams Parameter Diagrams参数图表PA Program Approval项目批准PAG Premier Automotive Group首要机动车项目组PAL Project Attribute Leadership项目特性领导层PAT Program Activity Team, Program Attribute Team, 项目促进小组、项目特性小组和or Program Action Team项目行动小组PCA Permanent Corrective Action持续改进行动PCF Parts Coordination Fixture零件夹具验证PCI Product Change Information产品变更信息PD Product Development产品开发PDL Program Design Language项目设计语言PD Q1Product Development Q1产品开发Q1PDN2Phased Data NotificationPDSA Plan, Do, Study, Act计划、实践、研讨、实施PFMEA Process Failure Mode Effects Analysis程序故障模式影响分析PI Process Improvement程序改进PIPC Percentage of P pk Indices Process Capable P pk指数程序能力百分比Percentage of Inspection Point That SatisfyPIST满足公差要求的检查点百分比TolerancePM Program Manger项目经理PMA Project Management Analyst项目管理分析PMT Program Management Team or Program Module T eam 项目管理组或项目模式组PO Purchase Order采购订单POC Point of Contact联系点POT Process Ownership Team程序所有者小组P p Process Potential程序潜力PP Pilot ProductPP&T Product Planning & Technology产品计划和技术PPAP Production Part Approval Process生产零件批准程序P pk Process Capability程序能力PPC Product Planning Committee产品计划委员会PPL Program Parts List项目零件清单PPMParts per Million (applied to defectiveSupplier parts)零件的百万分比率(适用于供应商不合格零件)PPPM Program and Pre-Production Management程序和投产前管理PR Public Relations公共关系PR Product Requirement产品要求PR Product Readiness Milestone产品就绪时间节点PSO Production Standard Order制造标准订单PSS Private Switching Service私人转接服务PST Program Steering Team项目指导小组PSW Part Submission Warrant零件质量合格验收PTO Powertrain Operations传动系统操纵件PTR Platinum Resistance Thermometer铂金电阻温度计PV Production Validation产品验证PV Process Variables程序变更PV Part Variation零件变更PVBR Prototype Vehicle Build Requirements样车制造要求PVM Production Validation Method产品验证方法PVP Powertrain Validation Program 传动系统验证程序PVT Product Vehicle Team or Plant Vehicle Team产品车辆组或工厂车辆组QA Quality Assurance质量保证QC Quality Control质量控制QCT Quality Cost Timing质量成本时机选择QFD Quality Function Deployment质量功能配备QFTF Quality Focused Test Fleet质量节点测试行动组QLS Quality Leadership System质量领导体系QMS Quality Management System质量管理体系QOS Quality Operating System质量运作体系QOE Quality of Event质量事件QPM Quality Program Manager质量项目经理QPS Quality Process System质量程序系统QR Quality Reject质量不合格QS-9000Quality Systems – 9000质量体系-9000Quality System Assessment for ProductQSA-PD产品开发质量体系评估DevelopmentQTM Quality Team Member质量小组成员QVA Quality-Focused Value Analysis Workshop车间质量重点价值分析R Range范围RFQ Request For Quotation寻求报价R&M Reliability and Maintainability可靠性及可维护性RMS Resource Management System资源管理系统R&R Repeatability and Reproducibility重复性和再现性R&R Roles and Responsibilities职务与责任R&VT Research & Vehicle Technology研究与车辆技术R/1000Repairs per thousand修理千分率RAP Remote Anti-theft Personality module 防盗遥控器个性化模式Robust Engineering Design Process Enabler积极的工程设计程序计划REDPEPRProjectRIE Reliability Improvement Engineer可靠性改进工程师ROA Return on Assets资产回报率ROCOF Rate of Occurrence of Failure故障发生率RPN Risk Priority Number优先处理风险号码RRCL Reliability and Robustness Check List可靠性与强有力的核对表RRDM Reliability and Robustness Demonstration Matrix可靠性与强有力的演示图表RRR PSW rejected PSW (零件质量合格验收) 不合格RWUP RealWorld Usage Profile现实生活使用记录S Standard deviation标准偏差s2Variance多样性SC Significant Characteristics重要特性Significant Characteristics/CriticalSCs/CCs重要特性/评价特性CharacteristicsSCAC Supplier Craftsmanship Advisory Committee供应商技术顾问委员会SCTs Strategic Commodity Teams策略性商品组SDS System Design Specifications系统设计参数SDS Subsystem Design Specification子系统设计参数SEVA Systems Engineering Value Analysis系统工程价值分析Senko Drawing先行图SHARP Safety and Health Assessment Review Process安全和健康评估讨论程序SI System International des Unit国际单位制SIM Supplier Improvement Metrics供应商改进步骤SMART Synchronous Material and Replenishment Trigger同步物料与补给触发器SME Subject Matter Expert主题专家SMF Synchronous Material Flow同步物料流程SOW Statement of Work工作陈述SP Support PlanSP/AP Structural Prototype/Attribute Prototype结构原形/特性原形SP&PI Strategic Process & Product Improvement策略性程序和产品改进SPC Special Product Committee特殊产品委员会SPC Statistical Process Control统计程序控制SPROM Sample Promise Date承诺的样品到货日SREA Supplier Request for Engineering Approval供应商要求工程批准SRI Supplier Responsible Issues供应商责任SSI Sales Satisfaction Index销售满意度指标SSM Strategic Sourcing Meeting策略选点会议ST Surface Transfer表面转移STA Supplier Technical Assistance供应商技术支持STARS Supplier Tracking and Reporting System供应商跟踪及汇报系统SVC Small Vehicle Center小型车中心TA Target Agreement目标协议TB Training Build训练制造TAP Target Achievement Plan目标完成计划TCM Total Cost Management 总成本管理TED Things Engineers Do工程师任务TEG Tooling and Equipment Group工装及设备组TEM Total Equipment Management全部设备管理TGR Things Gone Right事态发展正确TGW Things Gone Wrong事态发展错误TIS Time in Service服务期限TOC Table of Contents目录TPM Total Productive Maintenance全部生产维护TPPS Torque Process Potential Study扭矩程序潜力研究TQC True Quality Characteristics真实质量特性TRIZ (Russian)Theory of Inventive Problem Solving创造性解决问题的理论(俄罗斯) TRMC Timing, Release and Material Control (also 时效性、发布和物料控制(同known as Tar-Mac)Tar-Mac)TS-16949Technical Specification – 16949技术规范-16949 TSP Technical Skills Program技术性技能项目TTO Tool Try Out工装试运行UCL Upper Control Limit上限控制USL Upper Specification Limit参数上限V/C Very or Completely Satisfied非常或完全满意VC Vehicle Center汽车中心VC BuyerVehicle Center Buyer (now Consumer BusinessGroup Buyer)车辆中心客户(现在为商务集团购买客户)VDI Vehicle Dependability Index车辆可靠性指标VDS Vehicle Design Specifications车辆设计参数VDS Vehicle Descriptor Section车辆描述组VER Vehicle Evaluation Ratings车辆评估等级VFG Vehicle Function Group车辆功能组VIN Vehicle Identification Number车辆识别代码VLD Vehicle Line Director车辆生产线总监VO Vehicle Office车辆办公室VO Vehicle Operations车辆运作VOGO Vehicle Operations General Office车辆运作综合办公室VP Vice President副总裁VPMC Vehicle Project Management Coordinator车辆项目管理协调员VPP Vehicle Program Plan车辆项目计划VQL Vehicle Quality Level车辆质量级别VQR Vehicle Quality Review车辆质量研讨VRT Vehicle Review Team车辆研讨小组VRT Variability Reduction Team减少差异小组VRT Vehicle Reduction Team车辆减产小组WAS Work Analysis Sheet工作分析表WCR Worldwide Customer Requirements全球客户需求WERS Worldwide Engineering Release System全球工程发布系统WIP Work In Progress进行中的工作WMI World Manufacturing Identifier世界制造商识别代码WPRC Warranty Parts Return Center维修部件回收中心Potential Significant and CriticalYS/YC潜在的重要和评价特性CharacteristicsRemark: Editor adds the content in shadow. 备注:阴影部分的内容为编者增加。
IND560 weighing terminal和Fill-560应用软件商品说明书

2Industrial Weighing and MeasuringDairy & CheeseNewsIncrease productivitywith efficient filling processesThe new IND560 weighing terminal enables you to boost speed and precision during the filling process. Choose from a wide range of scales and weigh modules to connect to the terminal.The versatile IND560 excels in control-ling filling and dosing applications, delivering best-in-class performance for fast and precise results in manual, semi-automatic or fully automatic operations. For more advanced filling, the Fill-560 application software adds additional sequences and component inputs. Without complex and costly programming you can quickly con-figure standard filling sequences, or create custom filling and blending applications for up to four compo-nents, that prompt operators for action and reduce errors.Ergonomic design Reducing operator errors is achieved through the large graphic display which provides visual signals.SmartTrac ™, the METTLER TOLEDO graphical display mode for manual operations, which clearly indicate sta-tus of the current weight in relation to the target value, helps operators to reach the fill target faster and more accurately.Connectivity and reliabilityMultiple connectivity options are offered to integrate applications into your con-trol system, e.g. Allen-Bradley ® RIO, Profibus ®DP or DeviceNet ™. Even in difficult vibrating environments, the TraxDSP ™ filtering system ensures fast and precise weighing results. High reli-ability and increased uptime are met through predictive maintenance with TraxEMT ™ Embedded MaintenanceTechnician.METTLER TOLEDO Dairy & Cheese News 22Speed up manual operations with flexible checkweighingB e n c h & F l o o r S c a l e sHygienic design, fast display readouts and the cutting-edge color backlight of the new BBA4x9 check scales and IND4x9 terminals set the standard for more efficient manual weigh-ing processes.Flexibility through customizationFor optimal static checkweighing the software modules ‘check’ and‘check+’ are the right solutions. They allow customization of the BBA4x9 and the IND4x9 for individual activi-ties and needs, e.g. manual portion-ing or over/under control. Flexibility is increased with the optional battery which permits mobility. Hygienic design Easy-to-clean equipment is vital in food production environments. Both the BBA4x9 scale and the IND4x9 ter-minal are designed after the EHEDGand NSF guidelines for use in hygi-enically sensitive areas.Even the back side of the scale stand has a smooth and closed surfacewhich protects from dirt and allowstrouble-free cleaning.Fast and preciseThe colorWeight ® display with a colored backlight gives fast, clear indication when the weight is with-in, below or above the tolerance.The color of the backlight can be chosen (any mixture of red, greenand blue) as well as the condition itrefers to (e.g. below tolerance). The ergonomic design enables operators to work more efficiently due to less exhaustion.Short stability time, typically between 0.5s and 0.8s, ensures high through-put and increased productivity.PublisherMettler-Toledo GmbH IndustrialSonnenbergstrasse 72CH-8603 Schwerzenbach SwitzerlandProductionMarCom IndustrialCH-8603 Schwerzenbach Switzerland MTSI 44099754Subject to technical changes © 06/2006 Mettler-Toledo GmbH Printed in SwitzerlandYellow – weight above toleranceGreen – weight within toleranceRed – weight below toleranceYour benefits• Fast and precise results and operations • Higher profitability• Ergonomic design, simple to operate • Mobility up to 13h due to optional batteryFast facts BBA4x9 and IND4x9• 6kgx1g, 15kgx2g, 30kgx5g (2x3000d), for higher capacity scales: IND4x9 terminal • Weights and measures approved versions 2x3000e • Functions: simple weighing, static checkweighing, dispensing • Color backlight, bar graph • Tolerances in weight or %• 99 Memory locations • Optional WLAN, battery• Meets the IP69k protection standardsagainst high-pressure and steam cleaning • Complete stainless steel construction Immediate checkweighing resultswith color Weight®EHEDGThe colored backlight of the LC display provides easy-to- recognize indication whether the weight is within the tolerancelimits or not.WLANMETTLER TOLEDO Dairy & Cheese News 23HACCP programs, GMP (Good Manufacturing Practice), pathogen monitoring and good cleaning practices are essential for effective food safety plans. Our scales are constructed for compliance with the latest hygienic design guidelines.Hygienic design to improve food safetyMETTLER TOLEDO supports you in complying with the latest food safety standards like BRC, IFS or ISO 22000 by offering solutions which are:• Compliant with EHEDG (European Hygienic Engineering & Design Group) and NSF (National Sanitation Foundation) guidelines • Full V2A stainless steel construc-tions, optional V4A load plates • Smooth surface (ra < 0.8μm)• Easy-to-clean construction, no exposed holes • Radius of inside corners > 3mm• Ingress protection rating up to IP69k• Hermetically sealed loadcellsYour benefits• Reduce biological and chemical contamination risks • Fast and thorough cleaning procedures • Fulfillment of hygiene regulations • Long equipment life thanks to rugged designGuaranteed serviceKeep your business runningAvoid unnecessary downtime with our wide range of service packages.With a range of innovative service solutions offering regulatory compli-ance, equipment calibration, train-ing, routine service and breakdown assistance, you can profit from sus-tained uptime, together with ongoing performance verification and long life of equipment. There is a range of contract options designed to comple-ment your existing quality systems. Each one offers its own unique set of benefits depending on the equipment and its application.4/serviceFast facts PUA579 low profile scale • 300kgx0.05kg – 1500kgx0.2kg • Open design• Lifting device for easy cleaning • EHEDG conform(300 and 600kg models -CS/-FL)• Free size scale dimensions • Approach rampsExample:PUA579 first EHEDG conform floor scaleEHEDGW e i g h P r i c e L a b e l i n gChallenges faced in the packaging area are:• Responding quickly to retailer demands while improving margins • Improving pack presentation • Minimizing downtime and product giveawaysWith a complete offering of cutting-edge weighing technology, high-per-formance printing, and smart soft-ware solutions, we can help you tackle your labeling challenges whether they are very simple or highly demanding. Intuitive human-machine interfaceTouch-screen operator displays withgraphical icons guide the operator intuitively and reduce nearly every operation to just one or two key-strokes. This interface allows reduced operator training as well as increased operating efficiency.Advanced ergonomics and sani-tary designOur weigh-price labelers are made out of stainless steel for extensive pro-tection against food contamination. Careful attention to hygienic design requirements, with no dead spots and few horizontal parts, ensure that the labelers are easy to clean.Modular designOur product offering includes both manual and automatic weigh-price labelers constructed of flexible “build-ing blocks.” Different combinations and configurations can meet specific budget and operational requirements. METTLER TOLEDO will help you toselect the right:• Scale performance • Display technology • Memory capacity • IT connections • Degree of automation• Integration kitsA large range of options and peripher-als give flexibility for meeting unique requirements e.g. wireless network, hard disks, external keyboards, bar code scanners, RFID transponder, dynamic checkweighing, or metal detection.Weigh-price-labeling Ergonomic, modular, fastEtica 2300 standard manual labelerFor individual weight labeling of various products, high- speed weighing, smart printing and fast product changes are essential. METTLER TOLEDO offers static and automated solutions for both manual and high-speed prepack applica-tions. Choose from our Etica and PAS product range.METTLER TOLEDO Dairy & Cheese News 24Etica 2400i combination with automatic stretch wrappersEtica 2430G multi-conveyer weigh-price labeler rangeEfficient label applicatorsThe unique Etica label applicator (Etica G series) does not require an air compressor, allowing savings on initial equipment expense and ongo-ing maintenance costs. Labels are gently applied in any pre-memorized orientation.PAS systems provide motorized height adjustment and places the label in any corner of the package. Users will have a new degree of freedom in planning their case display layouts to maximize both product presentation and consumer impact.Smart label design tools Retailers want labels to carry clear, correct information, in accordance with their traceability and style requirements. Our solutions are equipped with labeldesign software tools which facili-tate the design of labels customizedfor retailers demands. A touch-screenallows the user to create specific labels– even with scanned elements such aslogos and graphics, pre-programmedlabel templates, or RFID.Versatile integration capabilitiesThe engineers at METTLER TOLEDOworked closely with Europe’s leadingautomatic stretch wrapper suppliersto design performance-enhancingand cost-effective weigh-wrap-labelsystem solutions. Achieving a smallsystem footprint means the systemsrequire only slightly more floor spacethan the wrapper alone.The PAS and Etica weigh-price label-ers can be integrated via TCP/IP ina METTLER TOLEDO scale network,in host computer systems and goodsmanagement systems.Etica weigh-price-labeling systems• Static and automatic weigh-price-labeling up to 55 pieces/min.• Operator displays:– 5.7” color back-lighted LCD (Etica 2300 series)– 10.4” high resolution touch screen (Etica 4400 series)• 3 inch graphic thermal printer (125 to 250mm/sec) withfully programmable label format (max. size 80x200mm)• Data memory:– 64 to 256 Mb RAM– 128 Mb to 10 Gb mass storage– Unlimited number of logo graphics and label descriptions• Interfaces:– 1 serial RS232 interface– Optional second RS232 + RS485 + Centronics port– Ethernet network communication interface(10baseT), TCP/IP, 2 USB ports (1)– Optional: hand-held bar code scanner for automatictraceability data processingGarvens PAS 3008/3012 price labelersEtica 4400METTLER TOLEDO Dairy & Cheese News 2FlexMount ® weigh moduleFast, reproducible and reliable batch-ing and filling are key success factors for your production process. Various factors can affect precision: foam can compromise optical/radar sensors, and solids do not distribute evenly in a tank or silo. Our weighing techno-logy is not affected by these condi-tions and provides direct, accurate and repeatable measurement of mass without media contact. In addition our range of terminals and transmit-ters/sensors enable easy connectivity to your control systems.Key customer benefits• Increased precision and consistencyof your material transfer processes• Faster batching process throughsupreme TraxDSP ™ noise and vibration filtering • Minimal maintenance cost Fast facts terminals/transmitters: PTPN and IND130• Exclusive TraxDSP ™ vibration rejection and superior noise filter-ing system • Easy data integration through a variety of interfaces, including Serial, Allen-Bradley ® RIO, Modbus Plus ®, Profibus ® and DeviceNET • IP65 stainless harsh versionsProcess terminal PTPN• Local display for weight indication and calibration checks • Panel-mount or stainless steel desk enclosureIND130 smart weight transmitter• Direct connectivity where no local display is required • Quick setup and run via PC tool • CalFREE ™ offers fast and easy cali-bration without test weights • DIN rail mounting versionPLCIND1306Tank and silo weighing solutions master your batching processesT a n k & S i l o W e i g h i n g S o l u t i o n sBoost your productivity and process uptime with reliable weighing equipment – improved batching speed and precision, maximum uptime at low maintenance cost.TraxDSP ™ ensures accurate results evenin difficult environments with vibrationPTPN process terminalMETTLER TOLEDO Dairy & Cheese News 27Quality data under control?We have the right solutionConsistently improving the quality of your products requires the ability of efficiently controlling product and package quality parameters in a fast-changing and highly competi-tive environment.Competition in the food industry –with high volumes but tight margins – causes demands for efficient quality assurance systems. Statistical Quality Control (SQC) systems for permanent online information and documenta-tion about your key quality para-meters convert into real cost savings.Our solutions for Statistical Quality Control (SQC) combine ease of opera-tion, quality data management and analysis functionality.• We offer mobile compact solutions with embedded SQC intelligence up to networked systems with an SQL database.• The systems are upgradeable and can be expanded and adapted to meet changing customer needs.• Simple and intuitive prompts guide the user through the sample proc-ess, reducing training costs as well as sampling errors.• Realtime analysis and alarms help to take immediate corrective measures and to save money by reducing overfilling.Throughout the manufacturing pro-cess, METTLER TOLEDO SQC solu-tions analyze your important product and package quality parameters andpresent them the way you want, help-ing to comply to legislation, to control and document your product qualityand your profitability.Metal detectionCheckweigher Sample check ® onlinequality data analysis/dairy-cheeseFor more informationMettler-Toledo GmbH CH-8606 Greifensee SwitzerlandTel. +41 44 944 22 11Fax +41 44 944 30 60Your METTLER TOLEDO contact:1. SevenGo ™ portable pH-meter2. In-line turbidity, pH and conductivity sensors3. DL22 Food and beverage analyzer4. Halogen moisture analyzersA wide range of solutions to improve processes1. Statistical Quality Control/Statistical Process Control2. Process weighing3. Predictive maintenance4. Methods of moisture content determinationShare our knowledgeLearn from our specialists – our knowledge and experience are at your disposal in print or online.Learn more about all of our solutions for the dairy and cheese industry at our website. You can find information on a wide range of topics to improve your processes, including case studies,application stories, return-on invest-ment calculators, plus all the product information you need to make aninformed decision.1 2 341423。
generic
©1999-2010 XDX Innovative Refrigeration, LLC. 800-939-0250
Summary of the Technology
• Conventionally, by design, the low side of a refrigeration system is very inefficient. Utilizing an expansion valve at the inlet to the evaporator, refrigerant is fed into the initial passes with a low vapor quality that necessitates laminar flow at a temperature that is colder passes with a low vapor quality that necessitates laminar flow at a temperature that is colder than the balance of the evaporator; perfect conditions for the build‐up of frost at the evaporator inlet. This, along with humidity infiltration through an open cooler’s door, condensing on the surface of the cold coil leads to further frosting which eventually covers most of the coil’s surface, limiting airflow and the transfer of heat. The MYSTICOOL Max® valve is an add‐on component that can improve a refrigerant system's performance and capacity by changing the characteristics of the refrigerant flow pattern through the evaporator. This change to annular flow leads to a more efficient system, better heat transfer, reduced defrosts and money saved. MYSTICOOL Max MYSTICOOL M ® creates its patented XSTREAM® Al i d Altered Bi‐Phase Flow/High Vapor Fraction d Bi Ph Fl /Hi h V F i Turbulent (ABF/HVFT) technology to allow for increased heat transfer coefficients, improved compression ratios, lower operating superheats, more stabile refrigerant flow, indoor air quality enhancement, safer compressor operation, encouraged oil return, cooler compressor head temperatures, reduced compressor runtime, and diminished frost build‐up. XDX® minimally will realize a 15% energy savings. y gy g The A.R.M.E.D. (adjustable refrigerant metering evaporator device) nozzle integrated in the Mysticool ® Max allows for the fine‐tuning of the refrigerant feed of any “DX” (Direct Expansion) system, and in tandem with the ABF/HVFT technology, allows for optimization of heat transfer throughout all areas of the evaporator coil. This multi‐functional valve is adaptable to any line size and is compatible with all common Freon‐based refrigerants and blends. It is rated at 700 psi, allowing use in newer refrigerants such as 410a.
PID Control System Analysis and Design
➢ Increases the phase-lag
➢ Gain margin (GM) and phase margin (PM) are reduced, and the closed-loop system becomes more oscillatory and potentially unstable
Integrator Windup Remedies
➢ Antiwindup can be achieved implicitly through automatic reset.
➢ Explicit Antiwindup implemented explicitly through internal negative feedback.
STANDARD STRUCTURES OF PID CONTROLLERS
➢ A PID controller is a phase lead-lag compensator with one pole at the origin and the other at infinity.
➢ PI-Phase lag.
➢ Unstable system
Remedies
➢ Involves use of filters
Linear low pass filter Velocity Feedback SetPoint Filter Nonlinear median filter
Linear low pass filter
➢ Windup is due to the controller states becoming inconsistent with the saturated control signal, and future correction is ignored until the actuator desaturates
温度解耦 Temperature decoupling control of double-level air
Temperature decoupling control of double-level airflowfield dynamicvacuum system based on neural network and prediction principleLi Jinyang n,Meng XiaofengScience and Technology on Inertial Laboratory,Beijing University of Aeronautics and Astronautics,No.37Xueyuan Road,Haidian District,Beijing100191,Chinaa r t i c l e i n f oArticle history:Received16April2012Received in revised form21June2012Accepted20July2012Available online14August2012Keywords:Decoupling controlPredictionNeural networksDouble-level airflowfieldParticle swarm optimizationa b s t r a c tDouble-level airflowfield dynamic vacuum(DAFDV)system is a strong coupling,large time-delay,andnonlinear multi-input–multi-output system.Decoupling and overcoming the impact of time-delay aretwo keys to obtain rapid,accurate and independent control for two air temperatures in two concatenatechambers of the DAFDV system.A predictive,self-tuning proportional-integral-derivative(PID)decoupling controller based on a modified output–input feedback(OIF)Elman neural model andmulti-step prediction principle is proposed for the nonlinearity,time-lag,uncertainty and strongcoupling characteristics of the system.A multi-step ahead prediction algorithm is presented fortemperature prediction to eliminate the effects of time-delays.To avoid getting into a local optimiza-tion,an improved particle swarm optimization is applied to optimize the weights of the OIF Elmanneural network during modeling.By using the modified OIF Elman neural network identifier,theDAFDV system is identified and the parameters of PID controller are tuned on-line.The experimentalresults for two typical cases indicate that the settling times are obviously shorten,steady-stateperformances are improved and more important is that one temperature no longerfluctuates along theother,which verify the proposed adaptive PID decoupling control is effective.&2012Elsevier Ltd.All rights reserved.1.IntroductionDouble-level airflowfield dynamic vacuum system(DAFDV)isthat the airflow temperatures in two concatenate chambers maintainin steady equilibrium states while maintaining a certainflow rate intoand out of the chambers.DAFDV systems have great application valuefor the simulation of dynamic atmospheric environments,calibrationof meteorological instruments and research of humidity generationtechnology based on two-temperature or two-temperature two-pressure principle(Wang,2003;Kitano et al.,2008;Helmut,2008).Air temperature control of single chamber has been widely studied bymany scholars(Lawton and Patterson,2000;EI Ghoumari et al.,2005;Thompson and Dexter,2005;Qi and Deng,2009;Li et al.,2011),andsomefindings have been extensively applied in industrial practices.However,researches on DAFDV systems have scarcely been repre-sented in the open literature.This may be attributed to two majorsources of difficulty.First,the simple and adequate dynamic relation-ships among the process variables are difficult to establish due to thenonlinearity,uncertainties and structure complexities.Second,thetwo air temperatures in the two concatenate chambers suffer impactfrom each other’sfluctuations.If the two air temperatures cannot bedecoupled effectively,they would not only delay reach steady states,but also not accomplish independent control at all.Therefore,in orderto achieve rapid,accurate and independent control,it is necessary todecouple these two variables.However,how the appropriate decou-pling method is selected according to the characteristics of controlobject is a key problem.The traditional decoupling ways to a multi-input multi-output(MIMO)system is mainly represented by modern frequencydomain methods such as diagonal dominance matrix,relativegain analysis method,characteristic curve method,state variablemethod,inverse Nyquist array and so on(Wang,2000).Thesemethods,which are based on strict transfer functions or statespaces,play an important role in decoupling the linear time-invariant MIMO systems.However,these methods are difficult toachieve dynamic decoupling for nonlinear or uncertain or time-variant MIMO systems because accurate system models aredifficult to develop for these systems.Thereby,these traditionaldecoupling methods are confined to a certain application scope.With the development of decoupling control theory,a multi-tude of other decoupling methods such as adaptive decoupling,energy decoupling,disturbance decoupling,robust decoupling,Contents lists available at SciVerse ScienceDirectjournal homepage:/locate/engappaiEngineering Applications of Artificial Intelligence0952-1976/$-see front matter&2012Elsevier Ltd.All rights reserved./10.1016/j.engappai.2012.07.011Abbreviations:DAFDV,double-level airflowfield dynamic vacuum;OIF,modified output–input feedback;PID,proportional-integral-derivative;MIMO,multi-input multi-output;BP,back-propagation;RBF,radial basis function;WBTC,water bath temperature control;EBTC,ethanol bath temperature control;HX,heatexchanger;ASSAVP,air source system with adjustable vacuum pressure;TITO,two-input two-output;SISO,single-input single-output;IPSO,improved particleswarm optimizationn Corresponding author.Tel./fax:þ8601082338221.E-mail address:by0817136@(L.Jinyang).Engineering Applications of Artificial Intelligence26(2013)1237–1245fuzzy decoupling,neural networks decoupling,prediction decou-pling,intelligent decoupling methods represented mainly by the fuzzy decoupling and the neural networks decoupling,have been proposed and applied in many control practices.The detailed introduction to these decoupling methods are summarized (Dong et al.,2011),this paper no longer repeats them.Adaptive decoupling has merits in decoupling a system with many uncertain factors and can solve the system’s uncertainty to a certain extent.Multilayer neural networks have adaptive,self-learning,strong fault tolerance abilities and are universal approx-imators capable of approximating any nonlinear function to any desired degree of accuracy,making it a powerful tool for the decoupling control of nonlinear systems.The modified output–input feedback (OIF)Elman neural network,as a kind of recurrent neural network,is superior to the static neural network such as back-propagation (BP)and radial basis function (RBF)neural network on the dynamic characteristic (Wu et al.,2011a ),and it is now extensively applied in the fields of system identification,nonlinear control and prediction control (Serhat et al.,2003;Qi et al.,2005;Gao and Wang,2007).However,neural networks commonly require to be combined with other algorithms to realize decoupling control (Wu and Chai,1997;Li,2006).Prediction is an effective means to control a time-delay system.Furthermore,the proportional-integral-derivative (PID)controller is widely used in many fields due to its simplicity and robustness (Kumar et al.,2007;Shi et al.,2008;Xu et al.,2008).Based on the above discussions,an adaptive PID decoupling control method based on the modified OIF Elman neural network and prediction principle is proposed in this paper.Because theDAFDV system is a strong coupling,complex MIMO nonlinear system with large time-delay and uncertainty,which can hardly acquire satisfactory control performance and even cannot reach the steady state at all by the conventional PID controller with fixed parameters.By the identification function of the OIF Elman neural network,the PID parameters are tuned on-line.Thus,the couplings between the manipulated variables can be treated as corresponding exterior disturbances,so the proposed controller is used to eliminate disturbance and obtain desired control performance in different operating regions.The time-delay effects can be reduced or elimi-nated by the prediction.The main contribution of this study is to propose an effective decoupling control strategy,which can be applied to a real-time plant conveniently,for the strong coupling,large-time delay and nonlinear system make it is difficult to elaborate a mathematic model precise enough for the control.The paper is structured in the following way.In Section 2,the composition of DAFDV system is presented.In order to analyze the system properties conveniently,the models of the DAFDV system are qualitatively developed in Section 3.Section 4is proposed the adaptive PID decoupling control method based on the modified OIF Elman neural network and prediction principle.In Section 5,the experimental results on a real-time DAFDV system are presented.Conclusions are drawn in Section 6.position of DAFDV systemThe DAFDV system,as shown in Fig.1,mainly consists of the pressure control system and the temperature control system.InNomenclature A cross section areac specific heat capacity(kJ/kg K)D time coefficient (s)F mass flow rate (kg/s)h convective heat transfer coefficient(kW/(m 2K))L spatial coefficient (m)t time (s)Ttemperature (K)U pipe circumference (m)xlength (m)rdensity (kg/m 3)Subscripts w water a air bwallFig.1.Diagram of double-level air flow filed dynamic vacuum system.L.Jinyang,M.Xiaofeng /Engineering Applications of Artificial Intelligence 26(2013)1237–12451238Fig.1,the airflows in the dash dotted arrows direction while the liquid(water or ethanol)in the solid arrows direction.The middle part of the airflowing through is the pressure control loop.The temperature control system is constituted of water bath tem-perature control(WBTC)subsystem and ethanol bath tempera-ture control(EBTC)subsystem.These two subsystems,which are used to achieve air temperature control in the downstream chamber C2within ranges from51C to801C and fromÀ701C to51C,respectively,are symmetrical about the pressure control loop.The air from C1passes through heat exchanger(HX)E1 when the controlled objective air temperature is between51C and801C.Otherwise,the air from C1passes through heat exchanger E2.Since the temperature control circuit of C1is same as that of C2,only the structure of temperature control circuit for C2is presented in Fig.1.Moreover,only the WBTC subsystem is introduced due to the same framework as that of the EBTC subsystem.The airflow temperature control in C2is achieved by heat exchange between water and air in E1.E1transfers heat from water to air or in the opposite direction,and the objective is to control the outlet air temperature,by changing the inlet water temperature.The inlet water temperature of the E1is acquired by controlling the temperature of thermostatic water bath T1.How-ever,the real actuators for water temperature control are heater H1installed at the bottom of T1and industrial chiller D1 connecting with T1.In the process of heating-up,the H1start to work and the liquid circulate between T1and E1with the aid of pump P3.Double-level voltage control strategy is adopted to improve the control precision.First,the input voltage supplied to H1is adjusted by the voltage regulator.Moreover,PID-controlled pulse-width modulated signal is employed to regulate the duty ratio of the control voltage.At the stage of decreasing process of temperature,the D1which is switched on manually operate at full speed,valve v5and v6open,and the water circulate between T1and D1by the driving of variable pump P1.The water temperature in T1is regulated by altering the speed of P1.The pressure control system is mainly constituted of four parts:the air source system with adjustable vacuum pressure (ASSAVP),upstream vacuum chamber,downstream vacuum chamber and the high vacuum system with adjustable vacuum pressure(C4).The ASSAVP are employed to supply adjustable and relatively stable pressure continuously for C1,and the C4are used to regulate the pressure in C2and provide a high vacuum environment,respectively.In order to improve the regulation ability and provide the driving power for airflowing,the pressure ratio between the upstream vacuum pressure and the down-stream vacuum air pressure should be within the scope from1.05 to20(this scope is determined in the experimental processes on a real plant-DAFDV system when the two air pressures are within the given range in this paper).Thus,the vacuum pump of HVS system needs to work in advance.To reduce the influence of the external environment,a200mm thermal insulation layer is set outside of the DAFDV system.3.Modeling of the DAFDV systemIn this section,the models of the DAFDV system are qualita-tively developed for analyzing the system properties conveni-ently.The temperature control process of the DAFDV system is that:(1)the water temperature of T1is manipulated by the heater or chiller.(2)The air temperature in C2is controlled by changing the inlet water temperature of E1,i.e.,the water temperature of T1.3.1.Modeling for T1Temperature rise of water in T1is manipulated by using a heater with a PID-controlled electronic resistance and tempera-ture decreasing is achieved by the water exchange between T1 and cold liquid tank(CLT)of D1.It is assumed that the heat exchange of pipelines is negligible.Therefore,according to con-servation of energy,these two processes can be,respectively described by Eqs.(1)and(2).For temperature rise process:C p dT h=dt¼P eð1ÞFor temperature decreasing process:C h dT h=dt¼c w FðT pÀT hÞð2ÞwhereC p¼c w m pwþc ps m psð3ÞC h¼c w m hwþc hs m hsð4Þwhere C h is the total thermal capacity of water in T1and wall of T1,C p is the total thermal capacity of water in CLT and wall of CLT;c W,c pS and c hs are,respectively specific heat capacity of water,wall of CLT and T1.m p W and m h W are,respectively,the water mass in CTL and T1,m p S and m h S are wall mass of CTL and T1.T p and T h are the temperatures of CTL and T1.F is the water massflow rate between D1and T1.P e is the heating power. Considering measurement delays of sensors and the dead-times of actuators exist as well as large volume of T1,this temperature control process of the DAFDV system is a large inertia system with large lags.3.2.Modeling for E1Since the air temperature is controlled by changing the inlet liquid temperature of heat exchanger E1,a counterflow co-axial double tube heat exchanger,as shown in Fig.2,is used here.The conservation of energy for both thefluids and the wall can be written with the some assumptions(Ansari and Mortazavi,2006): D w@T w@tþL w@T w@xþT w¼T bð5ÞD b@T bþT b¼h w U w T wþh a U a T aw w a að6ÞD a@T a@tÀL a@T a@xþT a¼T bð7Þwhere D and L are time coefficient(s)and the spatial coefficientFig.2.Counterflow co-axial double tube heat exchanger.L.Jinyang,M.Xiaofeng/Engineering Applications of Artificial Intelligence26(2013)1237–12451239(m),respectively,and are defined as follows:L w¼c w F wh w U w,L a¼c a F ah a U a,D w¼rwc w A wh w U w,D a¼rac a A ah a U a,D w¼rbc b A bh w U wþh a U að8ÞFirst,from Eqs.(5)–(7),we can know that the air temperature depends on not only structure parameters of HX but also both fluid properties through HX.In this study,our objective is achieving rapid,accurate and independent control for the airflow temperatures in two concatenate chambers within operating ranges fromÀ701C to801C.As the temperature changing over this wide operating range,the property parameters of twofluids, such as c w,r w,h w,c a,r a,h a,especially for air properties,vary significantly.Furthermore,the air speed passing through HX and corresponding Reynolds number are,respectively described:u a¼_Q a=Að9ÞRe¼r a u a d in=m a¼4r a_Q a=m a p d inð10Þwhere m a(kg/(m s))is the air viscosity,_Q a(m3/s)is the air volume flow rate,d m is the tube diameter(m).From Eq.(10),it can be seen that the air speed(u a)reduces with the air volumeflow rate ð_Q aÞand Re alters with_Q a,this fact implies that theflow state may be laminarflow or turbulentflow.However,the convective heat transfer coefficient(h a),are greatly different in this twoflow states and it is well known that h a is decreasing as the air speed reduction and exchange efficiency of HX degrade enormously.The lower h a means the heat exchange time is longer between the two fluids in the HX,namely,the time-delay from the inlet liquid temperature to the outlet air temperature become longer.Finally,the airflowing process from C1to C2is an exchange process of mass and energy.The two temperature couplings between C1and C2are mainly caused by theflow rate variation of air passing through control valve V2.Theflow rate is deter-mined by the upstream pressure(P1),the downstream pressure (P2)the upstream air temperatureðT auÞ,and the opening percen-tage of the control valve(O).The relationship betweenflow rate and the four variables can be expressed as the following nonlinear equation(Dong et al.,2011):_Q a ¼fðP1,P2,T au,OÞð11ÞAccording to conservation of energy of HX in steady state,wecan obtained,c w F wðT win ÀT woutÞ¼c a r a_Q aðT a outÀT a inÞð12Þwhere T ain and T aoutare,respectively the inlet and outlet airtemperature of the HX,T win and T woutare,respectively the inletand outlet liquid temperature of the HX.Considering that the pipelines between E1and C2as well as between T1and E1(HX)are short,we can think that the liquidtemperature(T h)in T1is equal to T win ,T auis equal to T ainand thedownstream air temperature(T ad )is equal to T aout,namely,T h¼T win ,T ain¼T au,T ad¼T aoutð13ÞCombining Eq.(11)with(12)and(13),the downstream air temperature(T ad)can be described asT a d ¼c w F wðT hÀT woutÞc aa_QaþT auð14ÞFrom Eq.(14),it can obviously that the variation of_Q a hasstrong effect on T ad and T au,that is,the coupling between T adand T auis caused by_Q a.The airflow rate is modified by altering the percentage of opening of valve V2.By qualitative analysis for the above mathematical models developed,it can be seen that the DAFDV system is a strong coupling,time-varying,uncertain and large time-delay complex nonlinear system.However,the above developed models for T1 and E1,in order to make the problem more tractable,rely on assumptions and simplifications that are not totally realistic. Furthermore,the system that we are controlling includes not only the HX but also its associated hardware,i.e.,valve,pump, PID-controlled heater,industrial chiller and many connecting pipelines.These associated hardwares are not considered during modeling.Therefore,accurate mathematical models for DAFDV system are difficult to establish and above mathematical models developed are only the approximate models.4.Realization of the decoupling method for the DAFDV system4.1.Temperature decoupling control strategy of the DAFDV systemThe structure for the temperature decoupling control of the DAFDV system is shown in Fig.3,which combines the modified OIF Elman neural network and the PID controller with prediction algorithm.In Fig.3,i¼1,2,r i(k)is the reference input,y i(k)the real temperature output,ym i(k)is the modified OIF Elman neural network identification model output,e i(k)is the error between the set-point value r i(k)and output y i(k)in every sampling point, u i(k)is the manipulated variable,NN1(NN2)the neural network identifiers,TDL1the time-delay operator from the outputs of y i(k),u1(k)and u2(k)to the input of NN1,TDL2the time-delay operator from the outputs of y2(k),u1(k)and u2(k)to the input of NN2.According to the error e i(k),the modified OIF Elman neural network identification model is used to tune the parameters of the conventional PID controller to keep the system stable and obtain satisfactory control performance.For two-input two-out-put(TITO)system,the coupling impact from the second controlFig.3.Decoupling control of the DAFAV system.L.Jinyang,M.Xiaofeng/Engineering Applications of Artificial Intelligence26(2013)1237–1245 1240loop is treated as exterior disturbance on thefirst main loop while the coupling effect from thefirst loop is treated as exterior disturbance to the second main loop.Thus,one TITO system can be divided into two independent single-input single-output (SISO)systems.Therefore,the combination of the PID controller with the modified OIF Elman neural network and prediction algorithm is appropriate to eliminate couplings and disturbances by identification of system dynamic model and reduce or elim-inate the time-delays of the system by prediction.4.2.Modified OIF Elman neural network model for DAFDV systemThe controlled DAFDV system can be described by the follow-ing nonlinear model with time-delay:yðkÞ¼F½yðkÀ1Þ,...,yðkÀn yÞ,uðkÀdÞ,...,uðkÀdÀn uÞ ð15Þwhere y are the upstream air temperature,T u,and the down-stream air temperature,T d,u is the air volumeflow rate altered by regulating the opening percentage(O)of the control valve V2,and voltage supplied to the heater or the speed of liquid circulation pump(P3).n u and n y are the orders of{y(t)}and{u(t)},respec-tively,d is the time-delay from output to input,and F(Á)is a nonlinear function which is identified by a modified OIF Elman neural network identification model.The OIF Elman neural network is a kind of recurrent neural network,which consists of the input,hidden,context,context2and output layers.The context layer and context2layers are used to memorize the former values of the hidden and output layer nodes, respectively.The feed-forward connections are modifiable,whereas the recurrent connections arefixed.The structure of OIF Elman neural network is shown in Fig.4(Wu et al.,2011a).In Fig.4,w u is the weight between the input layer and hidden layer,w y is the weight between the hidden layer and the output, w c is the weight from the context layer to the hidden layer,and w yc is the weight from the context2layer to the hidden layer. x c(k)and x(k)are the outputs of the context unit and the hidden unit,respectively.y c(k)and y m(k)are the outputs of the context 2layer and output layer,respectively.a and b are,respectively the feedback gains of the self-connections of context and context 2layers,0r a,b r1.Here,a and b are selected as0.5.The mathematical model of the OIF Elman model neural network is expressed as follows:xðkÞ¼Fðw c x cðkÞþw u uðkÀ1Þþw yc y cðkÞÞð16Þx cðkÞ¼aÂx cðkÀ1ÞþxðkÀ1Þð17Þy cðkÞ¼bÂy cðkÀ1ÞþyðkÀ1Þð18Þy mðkÞ¼gðw y xðkÞÞð19Þwhere g(x)is chosen as a linear function,and f(x)is selected as: f(x)¼1/(1þeÀx)in this paper.The standard Elman neural network often adopts BP algorithm to train the networks’weighs,however,it has slow convergence speed and is easy to get locked into local optimization(Zhang et al.,2007)while an improved particle swarm optimization (IPSO)algorithm-adaptive inertial weight algorithm(Iwasaki et al.,2006)has fast convergence speed and can avoid getting locked into local optimization.Therefore,this IPSO is applied to train the weights of the Elman neural network.The detailed optimization process can be seen in Ref.Wu et al.(2011b).4.3.Temperature prediction based on prediction principleAs shown in Fig.5(Dong et al.,2011),it is assumed that y(k), y(kÀ1)and y(kÀ2)are the temperature sampling values at T(k), T(kÀ1)and T(kÀ2)instant,respectively.The temperature sample value at the time T(kþ1)is y(kþ1).The sample period of temperature is T s.T s is chosen as0.1s in this study.Considering the temperature is the sluggish varying physical quantities and abrupt variations,except the initial stage of set-value switching, are impossible to happen for them in a short time.Therefore,for the temperature,we can think that the rate of change between the two adjacent sample points is equal(Dong et al.,2011), namely,9½^yðkþ1ÞÀyðkÞ À½yðkÞÀyðkÀ1Þ 9=T s¼9½yðkÞÀyðkÀ1ÞÀ½yðkÀ1ÞÀyðkÀ2Þ 9=T sð20ÞThen^yðkþ1Þcan be expressed as^yðkþ1Þ¼3½yðkÞÀyðkÀ1Þ þyðkÀ2Þð21ÞFrom Eq.(21),it can be seen that^yðkþ1Þis the function of y(k), y(kÀ1),y(kÀ2),therefore,Eq.(21)can be also described as^yðkþ1Þ¼f½yðkÞ,yðkÀ1Þ,yðkÀ2Þ ð22ÞBased on the single-step-ahead predictor model in Eq.(21), according to recursive principle,we can acquire the following expressions:^yðkþ2Þ¼f½^yðkþ1Þ,yðkÞ,yðkÀ1Þ¼f½f½yðkÞ,yðkÀ1Þ,yðkÀ2Þ ,yðkÞ,yðkÀ1Þ ð23Þ^yðkþ3Þ¼f½^yðkþ2Þ,^yðkþ1Þ,yðkÞ^ð24ÞFig.4.Structure of OIF Elman neural network.Fig.5.Air temperature variation with time.L.Jinyang,M.Xiaofeng/Engineering Applications of Artificial Intelligence26(2013)1237–12451241The recursive multi-step-ahead prediction expression can be written:^yðkþj9kÞ¼f½^yðkþjÀ1Þ,^yðkþjÀ2Þ,^yðkþjÀ3Þ¼g½yðkÞ,yðkÀ1Þ,yðkÀ2Þ ðj Z3Þð25Þwhere^yðkþj9kÞis the process output at time-step kþj predicted at time-step k.In this process,the predictive output^yðkþi9kÞði¼1ÁÁÁjÀ1Þand input values uðkþiÞði¼1ÁÁÁjÀ1Þare used.Here,uðkþiÞ¼uðkÞði¼1ÁÁÁjÀ1Þ.Obviously,the future output at time-step k and before k can be substituted with the real system output ^yðkþiÀjÞ¼yðkþiÀjÞðiÀj r0Þ.4.4.Self-tuning PID decoupling control based on modified OIF Elman modelThe digital incremental PID control algorithm is used in this paper,which is described as:u iðkÞ¼u iðkÀ1Þþk pi x ið1Þþk ii x ið2Þþk di x ið3Þð26Þwherex ið1Þ¼1NX Nj¼1e iðkþjÞÀe iðkþjÀ1ÞÂÃð27Þx ið2Þ¼1X Nj¼1e iðkþjÞð28Þx ið3Þ¼1NX Nj¼1e iðkþjÞÀ2e iðkþjÀ1Þþe iðkþjÀ2ÞÂÃð29Þwhere e i(kþj)¼r i(k)Ày i(kþj9k),N is called the prediction horizon, r m(kþj)is the reference trajectory at time-step kþj,y m(kþj9k)is the process output at time-step kþj predicted at time-step k,r i(k) is the system set point at time-step k.k pi,k ii and k di are, respectively the proportional,integral and differential coefficient.Since the time delays are uncertain and variable to some degree,thus,it is unreliable to determine the control actions based on output prediction for a specific point of time in the future.As a result,predictions contain a series of future time instants about a target point given by the time delay values used. The control actions are determined from the average of the series of predictions.This approach improves the control robustness against inaccuracies and variations in the time delays.Define the cost function J i as follows:J i¼½e iðkÞ 2=2¼½r iðkÞÀy iðkÞ 2=2o eð30ÞIn this research,e is selected as0.0036.According to the steepest Descent method,k pi,k ii and k di are regulated as the following:k piðkÞ¼k piðkÀ1ÞÀZ p@J i@k pi¼k piðkÀ1ÞþZ p e iðkÞ@y i@u ix ið1Þð31Þk iiðkÞ¼k iiðkÀ1ÞÀZ i @J i@k ii¼k iiðkÀ1ÞþZ i e iðkÞ@y i@u ix ið2Þð32Þk diðkÞ¼k diðkÀ1ÞÀZ d@J i@k di¼k diðkÀ1ÞþZ d e iðkÞ@y i@u ix ið3Þð33Þwhere Z p,Z i and Z d are,respectively,the proportional,integral and differential learning rate,which are Z p¼0.09,Z i¼0.25,and Z d¼0.15in this research.q y i/q u i is the Jacobian information of the controlled object,which can be acquired from the above modified OIF Elman identification results,namely,q y i/q u i E q ym i/q u i.5.Experimental resultsA set of240experimental data which is collected from the real DAFDV system is applied to simulation experiment.Before the simulation experiment,the determination to the number of hidden node and IPSO parameters is a key problem,which is directly associated with the performance of the identification model by the modified OIF Elman neural network.In this research,the number of hidden node is given as2rþ1according to Kolmogorov theorem,where r is the number of input variables. There are two inputs(opening percentage of the control valve V2, heater supplying voltage U or the speed of P1n).Thus,5hidden nodes are calculated for the modified OIF Elman neural network. The IPSO algorithm is used to optimize the weights of the OIF Elman neural network and thus each particle contains 2Â5þ5Â2þ5Â5þ2Â5parameters.The parameters of IPSO are chosen as follows:acceleration coefficients c1and c2are 1.496,maximum iteration number i max is250,swarm population N is30,maximum inertia factor o max is0.9,minimum inertia factor o min is0.1,and step size of the inertia factor D o is0.05.By running the program,the optimal weights(within a specific operating range)of the OIF Elman neural network are acquired. After testing of the identification and control algorithms via computer simulations,to validate the practical running effect, the self-tuning,predictive,PID decoupling temperature regulator is implemented,tuned and tested on the real experiment device of the DAFDV system,as shown in Fig.6(the upstream vacuum chamber and the downstream vacuum chamber are in parallel and the whole experimental device is large.Due to the limit of room,it is difficult to take a whole photograph of the whole experimental device.Considering structural similarity of the two vacuum chambers,the experimental device shown in Fig.6is only a downstream chamber.).The control cycle of DAFDV system is0.1s.The control objectives to the DAFDV system are as follows:(1) the disturbances between the upstream and the downstream air temperatures are as small as possible;(2)the overshoots of the two temperatures are less than2%;(3)the control precisions are 0.081C for the two temperatures and the settling time of the DAFDV system is as short aspossible.Fig.6.Experimental device.L.Jinyang,M.Xiaofeng/Engineering Applications of Artificial Intelligence26(2013)1237–1245 1242。
惠普彩色激光打印机 Pro M454 和惠普彩色激光多功能一体机 Pro M479 维修手册说明书
Table -1 Revision history Revision number 1
Revision date 6/2019
Revision notes HP LaserJet Pro M454 HP LaserJet Pro MFP M479 Repair manual initial release
Additional service and support for HP internal personnel HP internal personnel, go to one of the following Web-based Interactive Search Engine (WISE) sites: Americas (AMS) – https:///wise/home/ams-enWISE - English – https:///wise/home/ams-esWISE - Spanish – https:///wise/home/ams-ptWISE - Portuguese – https:///wise/home/ams-frWISE - French Asia Pacific / Japan (APJ) ○ https:///wise/home/apj-enWISE - English ○ https:///wise/home/apj-jaWISE - Japanese ○ https:///wise/home/apj-koWISE - Korean ○ https:///wise/home/apj-zh-HansWISE - Chinese (simplified)
Find information about the following topics ● Service manuals ● Service advisories ● Up-to-date control panel message (CPMD) troubleshooting ● Install and configure ● Printer specifications ● Solutions for printer issues and emerging issues ● Remove and replace part instructions and videos ● Warranty and regulatory information
automaticcontrolsystems8theditionsolutionsmanual
Automatic Control Systems 8th Edition Solutions ManualIf you are searched for the book Automatic control systems 8th edition solutions manual automatic-control-systems-8th-edition-solutions-manual.pdf in pdf form, then you've come to right website. We presented the utter edition of this ebook in ePub, DjVu, PDF, txt, doc forms. You may read Automatic control systems 8th edition solutions manual online automatic-control-systems-8th-edition-solutions-manual.pdf or download. Besides, on our website you may read the guides and diverse art books online, either downloads theirs. We wish draw on note what our website not store the eBook itself, but we grant reference to the website where you can download either read online. So that if have necessity to load pdf Automatic control systems 8th edition solutions manual automatic-control-systems-8th-edition-solutions-manual.pdf, in that case you come on to right website. We have Automatic control systems 8th edition solutions manual PDF, doc, txt, ePub, DjVu forms. We will be pleased if you revert to us over.automatic control systems - text only 8th edition - Buy Automatic Control Systems - Text Only by Benjamin C. Kuo and Farid Golnaraghi. . Year Published: 2003. Publisher: John Wiley & Sons, Inc.. - kuo, golnaraghi: automatic control systems, 8th - Kuo, Golnaraghi: Automatic Control Systems, 8th Edition. Home. Browse by Chapter. Browse by Chapterautomatic control systems? | yahoo answers - Jan 29, 2009 where can I download AUTOMATIC CONTROL SYSTEMS BY C.KUO AND GOLNARAGHI 8TH EDITION for freewhat is automatic control systems by benjamin c - What is automatic control systems by benjamin c kuo 8th edition solution manual?, . Home; Automatic Control Systems solution manual of by by Benjamin Kuo 7th orsolutions manual [for] automatic control systems: - Solutions manual [for] Automatic control systems [Benjamin C Kuo] on . *FREE* shipping on qualifying offers.automatic control systems - barnes & noble - Automatic Control Systems Seventh Edition Benjamin C. Kuo Updated to reflect the increasing use of computer-aided learning and design,automatic control systems, 9th edition.pdf - Automatic Control Systems, 9th Edition.pdf 4 download locations Solutions Manual Automatic Control Systems 8 ed ebooks automatic control; automatic controlautomatic control systems by kuo 8th edition - - Automatic Control Systems 8th. Edition: 8th Published: 2002 Format: Hardcover. Author: Benjamin C. Kuo; Farid Golnaraghi. ISBN: 0471134767 / 9780471134763kuo, golnaraghi: automatic control systems, 8th - Automatic Control Systems, 8th Edition. Home. Browse by Chapter. Welcome to the Web site for Automatic Control Systems, 8e by Benjamin C. Kuo and Farid Golnaraghi. solution manual, instructor manual, test bank - Aug 17, 2009 Automatic Control Systems, 8th Edition, Solution Manual Control Systems: 8th Edition, Ross, Solutions Manualautomatic control systems / with cd - 8th edition - Buy Automatic Control Systems / With CD by Benjamin Kuo and Farid Golnaraghi. ISBN10: 0471134767; ISBN13: 9780471134763. Published: 09/15/2002. Publisher: John Wileyautomatic control systems benjamin c. kuo 8th - Automatic Control Systems Benjamin C. Kuo 8th Edition Solution Manual Automatic Control Systems Benjamin C. Kuo 8th Edition Solution Manual.rar > re: test banks & solution manuals - google groups - Beasley, Buckless, Glover, Prawitt, Solutions Manual. Auditing, 8th Edition, Ricchiute, Rich, Solutions Manual. Automatic Control Systems, 8th Edition, Kuoautomatic control systems 8th edition - - COUPON: Rent Automatic Control Systems 8th edition (9780471134763) and save up to 80% on textbook rentals and 90% on used textbooks. Get FREE 7-day instant eTextbookautomatic control systems by benjamin c. kuo ( - Automatic Control Systems by Benjamin C. Kuo (8th Edition Solution Manual) eBooksautomatic control systems eighth edition solution - Search results of automatic control systems by benjamin c. kuo 8th edition solution manual. Filetype: Submitter: fdjontu Preview:solutions manual automatic control systems: - Solutions manual automatic control systems: Seventh edition Available from these sellers. Customers Who Viewed This Item Also Viewed. Page 1automatic control systems - kuo 8th - scribd - Automatic Control Systems Author - Kuo & Golnaraghi 8th Edition. Automatic Control Systems Author Provisions for automatic over-ride features when the driver citeseerx citation query automatic control - CiteSeerX - Scientific documents that cite the following paper: Automatic control systems. 8th editionautomatic control systems 8th edition solution - automatic control systems 8th edition solution; automatic control engineering raven solution 5th edition; automatic control systems solutions manualautomatic control systems eighth edition by - Automatic Control Systems, 9th Edition Automatic Control Systems, 8th ed (Solutions Manual) solution Automatic Control Systems 8Ed Kuo and Golnaraghi Solutions automatic control systems 8th edition solutions | - Access Automatic Control Systems 8th Edition solutions now. Our solutions are written by Chegg experts so you can be assured of the Solutions Manual; Scholarships;automatic control systems (8th edition) - Automatic Control Systems (8th edition) (translated version) (bonus CD. a)(Chinese Edition) [WANG XIAO FAN LI XIANG] on . *FREE* shipping on qualifying offers.download any solution manual for free - google groups - Auditing A Business Risk Approach Rittenberg Johnstone Gramling 8th Edition Solutions Manual > Automatic Control Systems 9e by Farid Golnaraghi and Benjamin Cautomatic control systems 8th edition by b. c - Now using fulltext search. We were unable to find the exact phrase you typed in search. If you want to find another keyword please enter in search field.by benjamin c. kuo automatic control systems (8th - By Benjamin C. Kuo Automatic Control Systems (8th Edition) on . *FREE* shipping on qualifying offers.automatic control systems 9th edition solutions | - Access Automatic Control Systems 9th Edition solutions now. Our solutions are written by Chegg experts so you can be assured of the highest quality! Chegg. BOOKS. the solution manual | facebook - The Solution Manual. 12,965 likes 122 talking about this. Find free Solutions Manuals for popular textbooks, 8th Edition #automatic control systems 8th edition solutions - Download free of automatic control systems 8th edition solutions manual, read counsel in the user guide, schematic diagram, the technical guide or perhaps theautomatic control systems by kuo 8th edition - Automatic Control Systems, 9th Edition DUPLICATE Systems provides engineers with a fresh new controls book that places special emphasis on mechatronics.automatic control systems by benjamin c.kuo( - Automatic Control Systems by Benjamin C.Kuo kat.cr Automatic Control Systems by Benjamin C Kuo Solution books Automatic Control Systems, 9th Edition by Farid9788126513710: automatic control systems, 8th ed - - : Automatic Control Systems, 8Th Ed (9788126513710) by Kuo,Golnaraghi and a great selection of similar New, Automatic Control Systems (Eighth Edition)automatic control systems by benjamin c. kuo ( - Automatic Control Systems By Benjamin C. Kuo (8th Edition Solution Manual), 10 - daniela mercury - musa calabar.mp3 611c051ec6 Soolamangalam Sisters-Muthuvel automatic control systems solution manual | - Automatic Control Systems solutions manual. solutions manuals / automatic control systems. Automatic Control Systems Solutions Manual Select your editionautomatic_ control_ systems_kuo_9th_ edition_-_ s -Automatic_Control_Systems_Kuo_9th_Edition_-_Solutions_ManualAutomatic_Control_Systems_Kuo_9th_Edition_-_Solutions_Manual. Edition A Automatic CoRelated PDFs:audiovox cd3210 owners manual, cummins model dgbb manual, allman sprayer manual, manual zongshen 250cc, lenovo t420 service manual, toyota corolla ke70 workshop manual, fossil es2344 watches owners manual, hotpoint vwsr4150dww washers owners manual, volvo penta d2 55 service manual, nht superonexu speakers owners manual, are manual treadmills good, maytag epic z front load washer manual, workshop manual volvo penta md7a cooling system, freightliner repair manual download, blackberry curve manual reset, emporio armani ar5331 watches owners manual, goodman gmv95 installation manual, canon md130 camcorders owners manual, panasonic rq e30v radios owners manual, nikon 50mm f 12 nikkor ai s manual focus, brother hs300 parts manual, clementine spss manual, mcgraw hill ryerson mathematics of data management solutions, zodiac zo8530 watches owners manual, toyota 1zz fe engine repair manual, viewsonic vot133 desktops owners manual, jvc mx j585vut owners manual, cme vx8 music keyboards owners manual, nikai nrf200d refrigerators owners manual, psychiatric mental health nursing review resource manual 4th, jeep liberty diesel manual transmission, leviton 200 173 owners manual, java com fr manual jsp, canton cd200 speakers owners manual, rv maintenance manual, 2007f250 owners manual, cybertronpc pcgmr3200a desktops owners manual, fuji finepix s7000 user manual, 2003 mercedes benz ml350 manual, 2001 rover 75 owners manual。
design of temperature control system
design of temperature controlsystemDesign of Temperature Control SystemThe design of a temperature control system involves several key components and considerations to ensure accurate and efficient temperature regulation. Here is a general overview of the design process:1. Define Requirements: Determine the temperature range, accuracy, response time, and other specifications required for the system. This will help in selecting appropriate sensors, actuators, and control algorithms.2. Sensor Selection: Select temperature sensors that are suitable for the operating range and accuracy requirements. Common types include thermistors, resistance temperature detectors (RTDs), and thermocouples.3. Actuator Selection: Choose actuators, such as heating elements or cooling devices, that can be controlled to achieve the desired temperature setpoint. Consider factors like power requirements, efficiency, and response time.4. Control Algorithm: Select a control algorithm, such as proportional-integral-derivative (PID), to regulate the temperature. The PID controller adjusts the actuator based on the measured temperature and the desired setpoint.5. Microcontroller or PLC: A microcontroller or programmable logic controller (PLC) is used to implement the control algorithm and interface with the sensors and actuators. It receives temperature measurements, calculates the control output, and sends commands to the actuator.6. User Interface: Design a user interface, such as a graphical display or a keypad, to allow operators to monitor and adjust temperature settings.7. Safety Features: Incorporate safety features, such as over-temperature alarms and shut-off mechanisms, to protect the system and personnel from potentialhazards.8. Testing and Calibration: Perform comprehensive testing and calibration of the temperature control system to ensure its accuracy and reliability. This may involve calibration of sensors, fine-tuning of the control algorithm, and validation of temperature stability.9. Integration and Optimization: Integrate the various components of the system, including hardware, firmware, and software. Optimize the system performance by considering factors like energy efficiency, response time, and noise immunity.The design of a temperature control system requires a careful consideration of the application requirements, selection of suitable components, and implementation of an effective control algorithm. By following these steps, you can develop a reliable and efficient temperature control system tailored to your specific needs.。
Native Instruments MASCHINE MIKRO MK3用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MIKRO MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (23)1.1MASCHINE Documentation (24)1.2Document Conventions (25)1.3New Features in MASCHINE 2.8 (26)1.4New Features in MASCHINE 2.7.10 (28)1.5New Features in MASCHINE 2.7.8 (29)1.6New Features in MASCHINE 2.7.7 (29)1.7New Features in MASCHINE 2.7.4 (31)1.8New Features in MASCHINE 2.7.3 (33)2Quick Reference (35)2.1MASCHINE Project Overview (35)2.1.1Sound Content (35)2.1.2Arrangement (37)2.2MASCHINE Hardware Overview (40)2.2.1MASCHINE MIKRO Hardware Overview (40)2.2.1.1Browser Section (41)2.2.1.2Edit Section (42)2.2.1.3Performance Section (43)2.2.1.4Transport Section (45)2.2.1.5Pad Section (46)2.2.1.6Rear Panel (50)2.3MASCHINE Software Overview (51)2.3.1Header (52)2.3.2Browser (54)2.3.3Arranger (56)2.3.4Control Area (59)2.3.5Pattern Editor (60)3Basic Concepts (62)3.1Important Names and Concepts (62)3.2Adjusting the MASCHINE User Interface (65)3.2.1Adjusting the Size of the Interface (65)3.2.2Switching between Ideas View and Song View (66)3.2.3Showing/Hiding the Browser (67)3.2.4Showing/Hiding the Control Lane (67)3.3Common Operations (68)3.3.1Adjusting Volume, Swing, and Tempo (68)3.3.2Undo/Redo (71)3.3.3Focusing on a Group or a Sound (73)3.3.4Switching Between the Master, Group, and Sound Level (77)3.3.5Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.773.3.6Navigating the Software Using the Controller (82)3.3.7Using Two or More Hardware Controllers (82)3.3.8Loading a Recent Project from the Controller (84)3.4Native Kontrol Standard (85)3.5Stand-Alone and Plug-in Mode (86)3.5.1Differences between Stand-Alone and Plug-in Mode (86)3.5.2Switching Instances (88)3.6Preferences (88)3.6.1Preferences – General Page (89)3.6.2Preferences – Audio Page (93)3.6.3Preferences – MIDI Page (95)3.6.4Preferences – Default Page (97)3.6.5Preferences – Library Page (101)3.6.6Preferences – Plug-ins Page (109)3.6.7Preferences – Hardware Page (114)3.6.8Preferences – Colors Page (114)3.7Integrating MASCHINE into a MIDI Setup (117)3.7.1Connecting External MIDI Equipment (117)3.7.2Sync to External MIDI Clock (117)3.7.3Send MIDI Clock (118)3.7.4Using MIDI Mode (119)3.8Syncing MASCHINE using Ableton Link (120)3.8.1Connecting to a Network (121)3.8.2Joining and Leaving a Link Session (121)4Browser (123)4.1Browser Basics (123)4.1.1The MASCHINE Library (123)4.1.2Browsing the Library vs. Browsing Your Hard Disks (124)4.2Searching and Loading Files from the Library (125)4.2.1Overview of the Library Pane (125)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (128)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (133)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (137)4.2.4Selecting a File Type (137)4.2.5Choosing Between Factory and User Content (138)4.2.6Selecting Type and Character Tags (138)4.2.7Performing a Text Search (142)4.2.8Loading a File from the Result List (143)4.3Additional Browsing Tools (148)4.3.1Loading the Selected Files Automatically (148)4.3.2Auditioning Instrument Presets (149)4.3.3Auditioning Samples (150)4.3.4Loading Groups with Patterns (150)4.3.5Loading Groups with Routing (151)4.3.6Displaying File Information (151)4.4Using Favorites in the Browser (152)4.5Editing the Files’ Tags and Properties (155)4.5.1Attribute Editor Basics (155)4.5.2The Bank Page (157)4.5.3The Types and Characters Pages (157)4.5.4The Properties Page (160)4.6Loading and Importing Files from Your File System (161)4.6.1Overview of the FILES Pane (161)4.6.2Using Favorites (163)4.6.3Using the Location Bar (164)4.6.4Navigating to Recent Locations (165)4.6.5Using the Result List (166)4.6.6Importing Files to the MASCHINE Library (169)4.7Locating Missing Samples (171)4.8Using Quick Browse (173)5Managing Sounds, Groups, and Your Project (175)5.1Overview of the Sounds, Groups, and Master (175)5.1.1The Sound, Group, and Master Channels (176)5.1.2Similarities and Differences in Handling Sounds and Groups (177)5.1.3Selecting Multiple Sounds or Groups (178)5.2Managing Sounds (181)5.2.1Loading Sounds (183)5.2.2Pre-listening to Sounds (184)5.2.3Renaming Sound Slots (185)5.2.4Changing the Sound’s Color (186)5.2.5Saving Sounds (187)5.2.6Copying and Pasting Sounds (189)5.2.7Moving Sounds (192)5.2.8Resetting Sound Slots (193)5.3Managing Groups (194)5.3.1Creating Groups (196)5.3.2Loading Groups (197)5.3.3Renaming Groups (198)5.3.4Changing the Group’s Color (199)5.3.5Saving Groups (200)5.3.6Copying and Pasting Groups (202)5.3.7Reordering Groups (206)5.3.8Deleting Groups (207)5.4Exporting MASCHINE Objects and Audio (208)5.4.1Saving a Group with its Samples (208)5.4.2Saving a Project with its Samples (210)5.4.3Exporting Audio (212)5.5Importing Third-Party File Formats (218)5.5.1Loading REX Files into Sound Slots (218)5.5.2Importing MPC Programs to Groups (219)6Playing on the Controller (223)6.1Adjusting the Pads (223)6.1.1The Pad View in the Software (223)6.1.2Choosing a Pad Input Mode (225)6.1.3Adjusting the Base Key (226)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (227)6.3Playing Tools (229)6.3.1Mute and Solo (229)6.3.2Choke All Notes (233)6.3.3Groove (233)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (235)6.3.5Tap Tempo (235)6.4Performance Features (236)6.4.1Overview of the Perform Features (236)6.4.2Selecting a Scale and Creating Chords (239)6.4.3Scale and Chord Parameters (240)6.4.4Creating Arpeggios and Repeated Notes (253)6.4.5Swing on Note Repeat / Arp Output (257)6.5Using Lock Snapshots (257)6.5.1Creating a Lock Snapshot (257)7Working with Plug-ins (259)7.1Plug-in Overview (259)7.1.1Plug-in Basics (259)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (263)7.1.3Loading, Removing, and Replacing a Plug-in (264)7.1.4Adjusting the Plug-in Parameters (270)7.1.5Bypassing Plug-in Slots (270)7.1.6Using Side-Chain (272)7.1.7Moving Plug-ins (272)7.1.8Alternative: the Plug-in Strip (273)7.1.9Saving and Recalling Plug-in Presets (273)7.1.9.1Saving Plug-in Presets (274)7.1.9.2Recalling Plug-in Presets (275)7.1.9.3Removing a Default Plug-in Preset (276)7.2The Sampler Plug-in (277)7.2.1Page 1: Voice Settings / Engine (279)7.2.2Page 2: Pitch / Envelope (281)7.2.3Page 3: FX / Filter (283)7.2.4Page 4: Modulation (285)7.2.5Page 5: LFO (286)7.2.6Page 6: Velocity / Modwheel (288)7.3Using Native Instruments and External Plug-ins (289)7.3.1Opening/Closing Plug-in Windows (289)7.3.2Using the VST/AU Plug-in Parameters (292)7.3.3Setting Up Your Own Parameter Pages (293)7.3.4Using VST/AU Plug-in Presets (298)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (300)8Using the Audio Plug-in (302)8.1Loading a Loop into the Audio Plug-in (306)8.2Editing Audio in the Audio Plug-in (307)8.3Using Loop Mode (308)8.4Using Gate Mode (310)9Using the Drumsynths (312)9.1Drumsynths – General Handling (313)9.1.1Engines: Many Different Drums per Drumsynth (313)9.1.2Common Parameter Organization (313)9.1.3Shared Parameters (316)9.1.4Various Velocity Responses (316)9.1.5Pitch Range, Tuning, and MIDI Notes (316)9.2The Kicks (317)9.2.1Kick – Sub (319)9.2.2Kick – Tronic (321)9.2.3Kick – Dusty (324)9.2.4Kick – Grit (325)9.2.5Kick – Rasper (328)9.2.6Kick – Snappy (329)9.2.7Kick – Bold (331)9.2.8Kick – Maple (333)9.2.9Kick – Push (334)9.3The Snares (336)9.3.1Snare – Volt (338)9.3.2Snare – Bit (340)9.3.3Snare – Pow (342)9.3.4Snare – Sharp (343)9.3.5Snare – Airy (345)9.3.6Snare – Vintage (347)9.3.7Snare – Chrome (349)9.3.8Snare – Iron (351)9.3.9Snare – Clap (353)9.3.10Snare – Breaker (355)9.4The Hi-hats (357)9.4.1Hi-hat – Silver (358)9.4.2Hi-hat – Circuit (360)9.4.3Hi-hat – Memory (362)9.4.4Hi-hat – Hybrid (364)9.4.5Creating a Pattern with Closed and Open Hi-hats (366)9.5The Toms (367)9.5.1Tom – Tronic (369)9.5.2Tom – Fractal (371)9.5.3Tom – Floor (375)9.5.4Tom – High (377)9.6The Percussions (378)9.6.1Percussion – Fractal (380)9.6.2Percussion – Kettle (383)9.6.3Percussion – Shaker (385)9.7The Cymbals (389)9.7.1Cymbal – Crash (391)9.7.2Cymbal – Ride (393)10Using the Bass Synth (396)10.1Bass Synth – General Handling (397)10.1.1Parameter Organization (397)10.1.2Bass Synth Parameters (399)11Working with Patterns (401)11.1Pattern Basics (401)11.1.1Pattern Editor Overview (402)11.1.2Navigating the Event Area (404)11.1.3Following the Playback Position in the Pattern (406)11.1.4Jumping to Another Playback Position in the Pattern (407)11.1.5Group View and Keyboard View (408)11.1.6Adjusting the Arrange Grid and the Pattern Length (410)11.1.7Adjusting the Step Grid and the Nudge Grid (413)11.2Recording Patterns in Real Time (416)11.2.1Recording Your Patterns Live (417)11.2.2Using the Metronome (419)11.2.3Recording with Count-in (420)11.3Recording Patterns with the Step Sequencer (422)11.3.1Step Mode Basics (422)11.3.2Editing Events in Step Mode (424)11.4Editing Events (425)11.4.1Editing Events with the Mouse: an Overview (425)11.4.2Creating Events/Notes (428)11.4.3Selecting Events/Notes (429)11.4.4Editing Selected Events/Notes (431)11.4.5Deleting Events/Notes (434)11.4.6Cut, Copy, and Paste Events/Notes (436)11.4.7Quantizing Events/Notes (439)11.4.8Quantization While Playing (441)11.4.9Doubling a Pattern (442)11.4.10Adding Variation to Patterns (442)11.5Recording and Editing Modulation (443)11.5.1Which Parameters Are Modulatable? (444)11.5.2Recording Modulation (446)11.5.3Creating and Editing Modulation in the Control Lane (447)11.6Creating MIDI Tracks from Scratch in MASCHINE (452)11.7Managing Patterns (454)11.7.1The Pattern Manager and Pattern Mode (455)11.7.2Selecting Patterns and Pattern Banks (456)11.7.3Creating Patterns (459)11.7.4Deleting Patterns (460)11.7.5Creating and Deleting Pattern Banks (461)11.7.6Naming Patterns (463)11.7.7Changing the Pattern’s Color (465)11.7.8Duplicating, Copying, and Pasting Patterns (466)11.7.9Moving Patterns (469)11.8Importing/Exporting Audio and MIDI to/from Patterns (470)11.8.1Exporting Audio from Patterns (470)11.8.2Exporting MIDI from Patterns (472)11.8.3Importing MIDI to Patterns (474)12Audio Routing, Remote Control, and Macro Controls (483)12.1Audio Routing in MASCHINE (484)12.1.1Sending External Audio to Sounds (485)12.1.2Configuring the Main Output of Sounds and Groups (489)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (494)12.1.4Configuring the Master and Cue Outputs of MASCHINE (497)12.1.5Mono Audio Inputs (502)12.1.5.1Configuring External Inputs for Sounds in Mix View (503)12.2Using MIDI Control and Host Automation (506)12.2.1Triggering Sounds via MIDI Notes (507)12.2.2Triggering Scenes via MIDI (513)12.2.3Controlling Parameters via MIDI and Host Automation (514)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (522)12.2.5Sending MIDI from Sounds (523)12.3Creating Custom Sets of Parameters with the Macro Controls (527)12.3.1Macro Control Overview (527)12.3.2Assigning Macro Controls Using the Software (528)13Controlling Your Mix (535)13.1Mix View Basics (535)13.1.1Switching between Arrange View and Mix View (535)13.1.2Mix View Elements (536)13.2The Mixer (537)13.2.1Displaying Groups vs. Displaying Sounds (539)13.2.2Adjusting the Mixer Layout (541)13.2.3Selecting Channel Strips (542)13.2.4Managing Your Channels in the Mixer (543)13.2.5Adjusting Settings in the Channel Strips (545)13.2.6Using the Cue Bus (549)13.3The Plug-in Chain (551)13.4The Plug-in Strip (552)13.4.1The Plug-in Header (554)13.4.2Panels for Drumsynths and Internal Effects (556)13.4.3Panel for the Sampler (557)13.4.4Custom Panels for Native Instruments Plug-ins (560)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (564)14Using Effects (567)14.1Applying Effects to a Sound, a Group or the Master (567)14.1.1Adding an Effect (567)14.1.2Other Operations on Effects (574)14.1.3Using the Side-Chain Input (575)14.2Applying Effects to External Audio (578)14.2.1Step 1: Configure MASCHINE Audio Inputs (578)14.2.2Step 2: Set up a Sound to Receive the External Input (579)14.2.3Step 3: Load an Effect to Process an Input (579)14.3Creating a Send Effect (580)14.3.1Step 1: Set Up a Sound or Group as Send Effect (581)14.3.2Step 2: Route Audio to the Send Effect (583)14.3.3 A Few Notes on Send Effects (583)14.4Creating Multi-Effects (584)15Effect Reference (587)15.1Dynamics (588)15.1.1Compressor (588)15.1.2Gate (591)15.1.3Transient Master (594)15.1.4Limiter (596)15.1.5Maximizer (600)15.2Filtering Effects (603)15.2.1EQ (603)15.2.2Filter (605)15.2.3Cabinet (609)15.3Modulation Effects (611)15.3.1Chorus (611)15.3.2Flanger (612)15.3.3FM (613)15.3.4Freq Shifter (615)15.3.5Phaser (616)15.4Spatial and Reverb Effects (617)15.4.1Ice (617)15.4.2Metaverb (619)15.4.3Reflex (620)15.4.4Reverb (Legacy) (621)15.4.5Reverb (623)15.4.5.1Reverb Room (623)15.4.5.2Reverb Hall (626)15.4.5.3Plate Reverb (629)15.5Delays (630)15.5.1Beat Delay (630)15.5.2Grain Delay (632)15.5.3Grain Stretch (634)15.5.4Resochord (636)15.6Distortion Effects (638)15.6.1Distortion (638)15.6.2Lofi (640)15.6.3Saturator (641)15.7Perform FX (645)15.7.1Filter (646)15.7.2Flanger (648)15.7.3Burst Echo (650)15.7.4Reso Echo (653)15.7.5Ring (656)15.7.6Stutter (658)15.7.7Tremolo (661)15.7.8Scratcher (664)16Working with the Arranger (667)16.1Arranger Basics (667)16.1.1Navigating Song View (670)16.1.2Following the Playback Position in Your Project (672)16.1.3Performing with Scenes and Sections using the Pads (673)16.2Using Ideas View (677)16.2.1Scene Overview (677)16.2.2Creating Scenes (679)16.2.3Assigning and Removing Patterns (679)16.2.4Selecting Scenes (682)16.2.5Deleting Scenes (684)16.2.6Creating and Deleting Scene Banks (685)16.2.7Clearing Scenes (685)16.2.8Duplicating Scenes (685)16.2.9Reordering Scenes (687)16.2.10Making Scenes Unique (688)16.2.11Appending Scenes to Arrangement (689)16.2.12Naming Scenes (689)16.2.13Changing the Color of a Scene (690)16.3Using Song View (692)16.3.1Section Management Overview (692)16.3.2Creating Sections (694)16.3.3Assigning a Scene to a Section (695)16.3.4Selecting Sections and Section Banks (696)16.3.5Reorganizing Sections (700)16.3.6Adjusting the Length of a Section (702)16.3.6.1Adjusting the Length of a Section Using the Software (703)16.3.6.2Adjusting the Length of a Section Using the Controller (705)16.3.7Clearing a Pattern in Song View (705)16.3.8Duplicating Sections (705)16.3.8.1Making Sections Unique (707)16.3.9Removing Sections (707)16.3.10Renaming Scenes (708)16.3.11Clearing Sections (710)16.3.12Creating and Deleting Section Banks (710)16.3.13Working with Patterns in Song view (710)16.3.13.1Creating a Pattern in Song View (711)16.3.13.2Selecting a Pattern in Song View (711)16.3.13.3Clearing a Pattern in Song View (711)16.3.13.4Renaming a Pattern in Song View (711)16.3.13.5Coloring a Pattern in Song View (712)16.3.13.6Removing a Pattern in Song View (712)16.3.13.7Duplicating a Pattern in Song View (712)16.3.14Enabling Auto Length (713)16.3.15Looping (714)16.3.15.1Setting the Loop Range in the Software (714)16.3.15.2Activating or Deactivating a Loop Using the Controller (715)16.4Playing with Sections (715)16.4.1Jumping to another Playback Position in Your Project (716)16.5Triggering Sections or Scenes via MIDI (717)16.6The Arrange Grid (719)16.7Quick Grid (720)17Sampling and Sample Mapping (722)17.1Opening the Sample Editor (722)17.2Recording Audio (724)17.2.1Opening the Record Page (724)17.2.2Selecting the Source and the Recording Mode (725)17.2.3Arming, Starting, and Stopping the Recording (729)17.2.5Checking Your Recordings (731)17.2.6Location and Name of Your Recorded Samples (734)17.3Editing a Sample (735)17.3.1Using the Edit Page (735)17.3.2Audio Editing Functions (739)17.4Slicing a Sample (743)17.4.1Opening the Slice Page (743)17.4.2Adjusting the Slicing Settings (744)17.4.3Manually Adjusting Your Slices (746)17.4.4Applying the Slicing (750)17.5Mapping Samples to Zones (754)17.5.1Opening the Zone Page (754)17.5.2Zone Page Overview (755)17.5.3Selecting and Managing Zones in the Zone List (756)17.5.4Selecting and Editing Zones in the Map View (761)17.5.5Editing Zones in the Sample View (765)17.5.6Adjusting the Zone Settings (767)17.5.7Adding Samples to the Sample Map (770)18Appendix: Tips for Playing Live (772)18.1Preparations (772)18.1.1Focus on the Hardware (772)18.1.2Customize the Pads of the Hardware (772)18.1.3Check Your CPU Power Before Playing (772)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (773)18.1.5Consider Using a Limiter on Your Master (773)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (773)18.1.7Improvise (773)18.2Basic Techniques (773)18.2.1Use Mute and Solo (773)18.2.2Create Variations of Your Drum Patterns in the Step Sequencer (774)18.2.3Use Note Repeat (774)18.2.4Set Up Your Own Multi-effect Groups and Automate Them (774)18.3Special Tricks (774)18.3.1Changing Pattern Length for Variation (774)18.3.2Using Loops to Cycle Through Samples (775)18.3.3Load Long Audio Files and Play with the Start Point (775)19Troubleshooting (776)19.1Knowledge Base (776)19.2Technical Support (776)19.3Registration Support (777)19.4User Forum (777)20Glossary (778)Index (786)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE MIKRO Quick Start Guide: This animated online guide provides a practical ap-proach to help you learn the basic of MASCHINE MIKRO. The guide is available from theNative Instruments website: https:///maschine-mikro-quick-start/2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:►Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.Document Conventions1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues.The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information canbe expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software andpaths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in thesoftware is printed in blue. Whenever you see this formatting applied, you will find thesame text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you seethis formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you seethis formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.1.3New Features in MASCHINE2.8The following new features have been added to MASCHINE: Integration▪Browse on , create your own collections of loops and one-shots and send them directly to the MASCHINE browser.Improvements to the Browser▪Samples are now cataloged in separate Loops and One-shots tabs in the Browser.▪Previews of loops selected in the Browser will be played in sync with the current project.When a loop is selected with Prehear turned on, it will begin playing immediately in-sync with the project if transport is running. If a loop preview starts part-way through the loop, the loop will play once more for its full length to ensure you get to hear the entire loop once in context with your project.▪Filters and product selections will be remembered when switching between content types and Factory/User Libraries in the Browser.▪Browser content synchronization between multiple running instances. When running multi-ple instances of MASCHINE, either as Standalone and/or as a plug-in, updates to the Li-brary will be synced across the instances. For example, if you delete a sample from your User Library in one instance, the sample will no longer be present in the other instances.Similarly, if you save a preset in one instance, that preset will then be available in the oth-er instances, too.▪Edits made to samples in the Factory Libraries will be saved to the Standard User Directo-ry.For more information on these new features, refer to the following chapter ↑4, Browser. Improvements to the MASCHINE MIKRO MK3 Controller▪You can now set sample Start and End points using the controller. For more information refer to ↑17.3.1, Using the Edit Page.Improved Support for A-Series Keyboards▪When Browsing with A-Series keyboards, you can now jump quickly to the results list by holding SHIFT and pushing right on the 4D Encoder.▪When Browsing with A-Series keyboards, you can fast scroll through the Browser results list by holding SHIFT and twisting the 4D Encoder.▪Mute and Solo Sounds and Groups from A-Series keyboards. Sounds are muted in TRACK mode while Groups are muted in IDEAS.。
诺瓦科技LED发送卡MCTRL660 PRO用户手册英文版

MCTRL660 PROIndependent ControllerProduct Version:V1.0.0Document Number: NS110100560User ManualXI 'AN N OVA S T AR T EC HCO .,L T D.Copyright © 2018 Xi’an NovaStar Tech Co., Ltd. All Rights Reserved.No part of this document may be copied, reproduced, extracted or transmitted in any form or by any means without the prior written consent of Xi’an NovaStar Tech Co., Ltd.Trademarkis a trademark of Xi’an No vaStar Tech Co., Ltd.StatementYou are welcome to use the product of Xi’an NovaStar Tech Co., Ltd. (hereinafter referred to as NovaStar). This document is intended to help you understand and use the product. For accuracy and reliability, NovaStar may make improvements and/or changes to this document at any time and without notice. If you experience any problems in use or have any suggestions, please contact us via contact info given in document. We will do our best to solve any issues, as well as evaluate and implement any suggestions.X I'A NN OV AS TA RT EC HC O.,LT D.User Manual Change HistoryChange HistoryX I'A NN OV AS TA RT EC HC O.,LTContentsChange History (ii)1 Safety (1)Storage and Transport Safety (1)Installation and Use Safety (1)2 Overview (2)3 Features (3)Features (3)Video Source Features (3)4 Applications (5)5 Cascading Devices (7)6 Hardware Structure (8)Appearance (8)6.1.1 Front Panel (8)6.1.2 Rear Panel (8)Dimensions (9)7 Home Screen (10)Sending Card Mode (10)Fiber Converter Mode (11)8 Menu Operations (13)Quick Screen Configuration (13)8.1.1 Step 1 Setting Input Source (13)8.1.2 Step 2 Setting Input Resolution (14)8.1.3 Step 3 Quickly Configuring Screen (14)Brightness Adjustment (15)Screen Settings (16)8.3.1 Quick Configuration (16)8.3.2 Advanced Configuration (16)8.3.3 Auto Configuration (17)8.3.4 Image Offset (18)Input Settings (18)Display Control (18)X I'A NN OV AS TA RT EC HC O.,LT D.Image Mirroring (19)Backup and Restore (21)Advanced Settings (21)8.8.1 Mapping Function ................................................................................................................................... 22 8.8.2 Loading RCFG Files ............................................................................................................................... 22 8.8.3 Alarm Threshold Settings........................................................................................................................ 23 8.8.4 Image Settings ........................................................................................................................................ 23 8.8.5 Saving to RV Card .................................................................................................................................. 23 8.8.6 Redundancy ............................................................................................................................................ 23 8.8.7 Presets .................................................................................................................................................... 23 8.8.8 Inputs Backup ......................................................................................................................................... 24 8.8.9 Low Latency ............................................................................................................................................ 24 8.8.10 Color Depth ........................................................................................................................................... 24 System Settings .. (25)Communication Settings (25)Working Mode (26)Language (27)9 Operations on PC (28)Individual Gamma Adjustment for RGB (28)Operations on Web Page (29)9.2.1 Environment Configuration ..................................................................................................................... 29 9.2.2 Applications ............................................................................................................................................. 29 Software Operations on PC .. (30)9.3.1 NovaLCT ................................................................................................................................................. 30 9.3.2 SmartLCT ............................................................................................................................................... 31 Firmware Update (31)9.4.1 NovaLCT ................................................................................................................................................. 31 9.4.2 SmartLCT .. (31)10 Specifications (32)XI 'AN NOVA S T AR T EC HCO .,L T D.User Manual 1 Safety1 SafetyThis chapter illustrates safety of the MCTRL660 PRO independent controller toensure the product’s storage, transport, installation and use safety.Safety instructions are applicable to all personnel who come into contact with or usethe product. Please pay attention to following points.●Read through the instructions.●Retain all instructions.●Comply with all instructions.Storage and Transport Safety●Pay attention to dust and water prevention.●Avoid long-term direct sunlight.●Do not place the product in a position near fire and heat.●Do not place the product in an area containing explosive materials.●Do not place the product in a strong electromagnetic environment.●Place the product in a stable position to prevent damage or personal injurycaused by dropping.●Save the packing box and materials for future storage and shipping of product.For maximum protection during storage and shipping, repack the product as itwas originally packed at the factory.Installation and Use Safety●Only trained professionals may install the product.●Plugging and unplugging operations are prohibited when the power is on.●Ensure safe grounding of the product.●Beware of electric shock hazards.●Always wear a wrist band and insulating gloves.●Do not place the product in an area that is frequently or strongly shaken.●Perform regular dust removal.●Rather than having the product disassembled and maintained by non-certifiedprofessionals, please contact NovaStar for maintenance at any time.●Replace faulty parts only with the spare parts supplied by NovaStar.X I'A NN OV AS TA RT EC HC O.,LT D.User Manual2 Overview2OverviewThe MCTRL660 PRO is a professional controller developed by NovaStar. A single MCTRL660 PRO has a loading capacity of up to 1920×1200@60Hz. It allows users to customize resolutions to configure ultra-large screens with ultra-width or ultra-height.The MCTRL660 PRO has various video connectors:● Input connectors: 1 × 3G-SDI, 1 × HDMI 1.4a, 1 × single-link DVI ● Output connectors: 6 × Gigabit Ethernet ports, 2 × 10G optical ports ●Loop output connectors: 1 × 3G-SDI LOOP , 1 × HDMI 1.4a LOOP , 1 × DVI LOOPThe MCTRL660 PRO has many industry-leading advanced technologies:●Input of ultra-high color depths, such as 10-bit/12-bit 4:4:4, with input resolutions up to 1920×1080@60Hz, increasing color expression capabilities by 4096 times compared to 8-bit inputs, and presenting images with rich and delicate colors, smoother transitions, as well as clearer details● Individual Gamma adjustment for RGB, effectively controlling image non-uniformity under low grayscale and white balance offset to improve image quality ●A low latency of less than 1 frame (≤ 10 lines)● Dual working modes: working as sending card and fiber converter● One-click backup and recovery, quickly recovering previous screenconfigurations to deal with sudden on-site failure.●Image mirroring, allowing for more cool and dazzling stage effectsThe MCTRL660 PRO is mainly used for the rental and fixed fields, such as concerts, live events, security monitoring centers, Olympic Games and various sports centers.XI 'AN N OVA S T AR T EC HCO .,L T D.3FeaturesFeatures● Supports inputs of 10-bit/12-bit 4:4:4 ultra-high color depths and resolutions up to 1920×1080@60Hz.● A low latency of less than 1 frame (≤ 10 lines) ● Auto LED screen configuration ● Web control ● Image mirror● Dual working modes: working as sending card and fiber converter ● Pixel level brightness and chroma calibration● Independent Gamma adjustment of RGB (Only the A8s receiving card supports this function) ● Monitoring of inputs● One-click backup and recovery●Multiple MCTRL660 PRO units can be cascaded.Video Source FeaturesO VA S T AR T EC HCO .,L T D.X I'A NN OV AS TA RT EC HC O.,LTUser Manual4 Applications4ApplicationsThe MCTRL660 PRO can work as a sending card or fiber converter, meeting multiple application needs.Scenario 1: Application of Sending Card ModeOn the OLED menu screen, choose Working Mode > Sending Card . This mode uses the optical ports or Gigabit Ethernet ports to output video signals.Figure 4-1 Application of sending card modeScenario 2: Application of Fiber Converter ModeSet the working mode for the two devices respectively, as shown in Figure 4-2. Device 2 uses the optical ports (for input/output) and Gigabit Ethernet ports (for output/input) to realize optical and electric signal conversion, which allows for long-distance signal transmission.XI 'AN N OVA S T AR T EC HCO .,L T D.User Manual 4 Applications Figure 4-2 Application of fiber converter modeScenario 3: Application of Dual-Output Working ModeSet the working mode for the two devices respectively, as shown in Figure 4-3.Device 1 uses the optical ports and Gigabit Ethernet ports to output video signals atthe same time.Figure 4-3 Application of dual-output working modeX I'A NN OV AS TA RT EC HC O.,LT D.User Manual 5 Cascading Devices5 Cascading Devices●The control computer needs to control multiple MCTRL660 PRO devices.Cascade devices via USB IN and USB OUT ports of the MCTRL660 PROdevices. Up to 8 devices can be cascaded.●Multiple MCTRL660 PRO devices need to be genlocked.Cascade devices via GENLOCK IN and GENLOCK LOOP connectors of theMCTRL660 PRO devices. Up to 8 devices can be cascaded.X I'ANN OV AS TA RT EC HC O.,LT D.6Hardware StructureAppearance6.1.1 Front Panel6.1.2 Rear PanelXI 'AEC HCO .,L T D.DimensionsUnit: mmXI 'AN N OVA S T AR T EC7Home ScreenSending Card ModeIn the sending card mode, the home screen of the MCTRL660 Pro is shown below./The system configuration file is backed up/not backed up. XI 'AOVA T AR T EC HCO .,L T D.//Voltage alarm / Temperature alarm / Voltage and temperature alarms(When there are no such alarms, the backup status is displayed here.)1–2Optical port connection status:●●///Connection status of control ports: Not connected / USB connected / Ethernet connected / GENLOCK connectedWhen USB port, Ethernet port and GENLOCK connector are all connected to the control computer, their priority in control is GENLOCK > USB >ETHERNET.7LED screen brightness/Buttons on the front panel are locked/unlocked.Fiber Converter Mode In the fiber converter mode, the home screen of the MCTRL660 Pro is shown below.XI 'A N N O V A S T A7///Normal voltage and temperature / Voltage alarm / Temperature alarm / Voltage and temperature alarms//Connection status of control ports:Not connected / USB connected / Ethernet connected When both USB and Ethernet ports are connected to the control computer, USB port has the priority in control./Buttons on the front panel are locked/unlocked.X I'AN OV AS T8Menu OperationsThe MCTRL660 PRO is powerful and easy to use. You can quickly configure the LED screen to light it up and display the entire input source following steps in 8.1 Quick Screen Configuration . With other menu settings, you can further improve the LED screen display effect.Instruction on knob operations:● Press the knob to enter a menu page or confirm an operation. ● Rotate the knob to select a menu item or adjust a menu parameter.●Hold the knob and BACK button simultaneously for 5 seconds to lock or unlockall the buttons.Quick Screen ConfigurationFollowing the steps below, namely Setting Input Source > Setting InputResolution > Quickly Configuring Screen , you can quickly light up the LED screen to display the entire input source.8.1.1 Step 1 Setting Input SourceSupported input sources include 3G-SDI, Single-Link DVI and HDMI 1.4a. Select an input source that matches the type of the inputted external video source. Constraints on input sources:● Only one video input source can be selected at the same time. ● Interlaced SDI video sources do not support low latency. ●SDI video sources do not support the following functions:− Color depth adjustment − Image mirroring−Contrast, saturation and hue adjustmentXI 'AN N OVA S T AR T EC HCO .,L T D.Figure 8-1 Input source settingsStep 1 On the home screen, press the knob to enter the menu. Step 2 Chose Input Settings > Input Source to enter its submenu. Step 3 Select the target video source and press the knob to enable it.8.1.2 Step 2 Setting Input ResolutionNote: SDI input sources do not support input resolution settings.The input resolution can be set through either of the following methods.Method 1: Selecting a Preset ResolutionSelect an appropriate preset resolution and refresh rate as the input resolution.Step 1 On the home screen, press the knob to enter the menu.Step 2 Choose Input Settings > Preset Resolution to enter its submenu.Step 3 Select a resolution and a refresh rate, and press the knob to apply them respectively.The MCTRL660 PRO supports the following preset resolutions.● 1024×768@(24/30/48/50/60/72/75/85/100/120)Hz ● 1280×1024@(24/30/48/50/60/72/75/85)Hz ● 1366×768@(24/30/48/50/60/72/75/85/100)Hz ● 1440×900@(24/30/48/50/60/72/75/85)Hz ● 1600×1200@(24/30/48/50/60)Hz ● 1920×1080@(24/30/48/50/60)Hz ● 1920×1200@(24/30/48/50/60)Hz ● 2560×960@(24/30/48/50)Hz ●2560×1600@(24/30)HzMethod 2: Customizing a ResolutionCustomize a resolution by setting a custom width, height and refresh rate.Step 1 On the home screen, press the knob to enter the menu.Step 2 Choose Input Settings > Custom Resolution to enter its submenu and set thescreen width, height and refresh rate. Step 3 Select Apply and press the knob to apply the custom resolution.8.1.3 Step 3 Quickly Configuring ScreenThis function is used to quickly configure a screen.XI 'AN N OVA S T AR T EC HCO .,L T D.Figure 8-2 Quick configurationStep 1 On the home screen, press the knob to enter the menu. Step 2 Choose Screen Settings > Quick Config to enter its submenu. Step 3 Enable Quick Config and set the parameters.● Set Cabinet Row Qty and Cabinet Column Qty (number of cabinet rows and columns to be loaded).●Set Port 1 Cabinet Qty (number of cabinets loaded by Ethernet port 1). The device has restrictions on the number of cabinets loaded by the Ethernet ports. For details, see Note a).●Set Data Flow of the screen. For details, see Note c), d), and e).Brightness AdjustmentAdjust the LED screen brightness value based on the current ambient brightness andeye comfort. Appropriate brightness can extend life of LEDs in LED screen.XI 'AO .,L T D.Figure 8-3 Brightness adjustmentStep 1 On the home screen, press the knob to enter the menu.Step 2 Select Brightness and press the knob to enter the adjustment status.Step 3 Rotate the knob to adjust the brightness value. The LED screen displays theadjustment effect in real time. Press the knob to apply the brightness value.Screen SettingsConfigure the LED screen to ensure the screen can display the whole imagenormally.Screen configuration methods include quick, advanced and auto configurations.There are constrains on these methods, explained as below.●The three methods cannot be used at the same time.●When you are configuring screen in NovaLCT, the three configuration methodson The MCTRL 660 PRO are disabled.8.3.1 Quick ConfigurationConfigure the whole LED screen uniformly and quickly. For details, see 8.1.3 Step 3Quickly Configuring Screen.8.3.2 Advanced ConfigurationSet parameters for each Ethernet port, including number of cabinet rows andcolumns (Cabinet Row Qty and Cabinet Column Qty), horizontal offset (Start X),vertical offset (Start Y), and data flow.Figure 8-4 Advanced configurationStep 1 On the home screen, press the knob to enter the menu.Step 2 Choose Screen Settings > Advanced Config to enter its submenu.Step 3 Enable Advance Configand set the parameters.X I'A NN OV AS TA RT EC HC O.,LT D.8.3.3 Auto ConfigurationNote: Each Ethernet port must load only a whole row or column of cabinets. Figure 8-5 Each Ethernet port loading only one row of cabinetsFigure 8-6 Each Ethernet port loading only one column of cabinetsFigure 8-7 Auto configurationStep 1 On the home screen, press the knob to enter the menu. Step 2 Choose Screen Settings > Auto Config to enter its submenu. Step 3 Enable Auto Config and select a data flow.XI 'AN N OVA S T AR T EC HCO .,L T D.8.3.4 Image OffsetAfter configuring the screen, adjust the horizontal and vertical offsets (Start X and Start Y ) of the overall displayed image to ensure it is displayed in the target position. Figure 8-8 Image offsetStep 1 On the home screen, press the knob to enter the menu. Step 2 Choose Screen Settings > Image Offset to enter its submenu. Step 3 Set the Start X and Start Yvalues.Input SettingsSet the input source and input resolution.Input Source SettingsOn the OLED menu screen, select an input source that matches the type of the inputted external video source. Only one video input source can be selected at the same time. For details, see 8.1.1 Step 1 Setting Input Source .Input Resolution SettingsSet a preset or custom resolution for the selected input source. For details, see 8.1.2 Step 2 Setting Input Resolution.Display ControlControl the status of display on the LED screen. Figure 8-9 Display controlNormal : The LED screen displays the current input source normally.Black Out : The LED screen goes black and does not display input source still being played in the background.Freeze : The LED screen always displays the frame when frozen. The input source is still being played in the background.Test Pattern : Test patterns are used to check the display effect and pixel operating status. There are 8 test patterns, including pure colors and line patterns.XI 'AN N OVA S T AR T EC HCO .,L T D.Step 1 On the home screen, press the knob to enter the menu. Step 2 Choose Display Control to enter its submenu. Step 3Select a control mode and press the knob to apply it.Image MirroringMirror images displayed on the LED screen. You can disable mirroring, mirror the image from left to right or from top to bottom. The image mirroring is based on the entire output image.Constrain: Image mirroring and low latency cannot be enabled at the same time. Figure 8-10 Image mirroringStep 1 On the home screen, press the knob to enter the menu. Step 2 Select Mirror and press the knob to enter its submenu.Step 3 Set the mirroring mode for the image loaded by current Ethernet port.Step 4 (Optional) Select Apply to All Ports and press the knob. The mirroring settings willtake effect on all other Ethernet ports automatically.The mirroring effects are illustrated in the following figures.Figure 8-11 Left-right mirroring of the image loaded by Ethernet port 1As shown above, after you set the mirroring mode as left-right for Ethernet port 1, the image displayed in the Ethernet port 1 area changed to the left-right mirrored image of the image loaded by Ethernet port 4. That is to say, the entire image is mirrored horizontally, but only the Ethernet port 1 area displays the partial mirrored image.XI 'AN N OVA S T AR T EC HCO .,L T D.Figure 8-12 Left-right mirroring of images loaded by Ethernet port 1 and 2As shown above, after you set the mirroring mode as left-right for Ethernet ports 1-2, the images displayed in the areas of Ethernet ports 1-2 changed to the left-rightmirrored images of the images loaded by Ethernet ports 3-4. That is to say, the entire image is mirrored horizontally, but only the areas of Ethernet ports 1-2 display the partial mirrored images.Figure 8-13 Left-right mirroring of the entire imageAs shown above, after you set the mirroring mode as left-right for Ethernet ports 1-4, the entire image is mirrored horizontally.Figure 8-14 T op-bottom mirroring of the image loaded by Ethernet port 1As shown above, after you set the mirroring mode as top-bottom for Ethernet port 1, the image loaded by Ethernet port 1 will be mirrored vertically. That is to say, the entire image is mirrored vertically, but only the Ethernet port 1 area displays thepartial mirrored image.XI 'AN N OVA S T AR T EC HCO .,L T D.Figure 8-15 T op-bottom mirroring of the entire imageAs shown above, after you set the mirroring mode as top-bottom for Ethernet ports 1-4, the entire image is mirrored vertically.Backup and RestoreFigure 8-16 Backup and restore●Back up the system configuration to the controller.●Restore the system configuration from the controller.●Restore the receiving card configuration from the controller.●Restore the sending card configuration from the controller.System configuration includes configuration files of the sending card (namely thecontroller) and receiving cards.Advanced SettingsFigure 8-17 Advanced settingsX I'A NN OV AS TA RT EC HC O.,LT D.8.8.1 Mapping FunctionWhen mapping function is enabled, each of the cabinets will display its cabinet No.and the No. of the Ethernet port that loads the cabinet.Note: Receiving cards used by the system must support mapping function.Figure 8-18 Illustration of mapping functionExample: P: 01 indicates the Ethernet port No. #001 indicates the cabinet No.8.8.2 Loading RCFG FilesBefore you begin: Save the cabinet configuration file (*.rcfgx or *.rcfg) to the local PC.Note: Configuration files of irregular cabinets are not supported.Step 1 Run NovaLCT and choose Tools > Controller Cabinet Configuration File Import.Step 2 On the displayed page, select the currently used serial port or Ethernet port, click Add Configuration File to select and add a cabinet configuration file.Step 3 Click Save the Change to HW to save the change to the controller.X I'A NN OV AS TA RT EC HC O.,LT D.8.8.3 Alarm Threshold SettingsSet the alarm thresholds for device temperature and voltage. When a threshold is exceeded, its corresponding icon will be flashing, instead of displaying the value.● : Voltage alarm, icon flashing. Voltage threshold range: 3.5 V –7.5 V). ●: Temperature alarm, icon flashing. Temperature threshold range: -20°C –85°C). ●: Voltage and temperature alarms at the same time, icon flashing.Note: When there are no temperature or voltage alarms, the home screen will display the backup status.8.8.4 Image SettingsAdjust the color of parameters of the output image on the LED screen.Table 8-1 Image parameters8.8.5 Saving to RV CardSend and save the configuration parameters of the controller to the receiving cards and those parameters will not be lost after the controller is powered off.8.8.6 Redundancy Set the controller as the primary or backup device. When the controller works as abackup device, set the data flow direction as opposite to that of the primary device.If the controller is set as the backup device, when the primary device fails, the backup device will immediately take over the work of the primary device, that is, the backup takes effect. After the backup takes effect, the target Ethernet port icons on the home screen will have marks on top flashing once every 1 second.8.8.7 PresetsChoose Advanced Settings > Presettings to save current settings as a template. Up to 10 presets can be saved.●Save : Save current parameters as a preset.XI 'A N N ,L T D.● Load : Read back the parameters from the saved preset. ●Delete : Delete the parameters saved in the preset.8.8.8 Inputs BackupSet a backup video source for each primary video source. Other input video sources supported by the controller can be set as backup video sources.After a backup video source takes effect, the video source selection is irreversible. Table 8-2 Video source backup8.8.9 Low LatencyLow latency is used to reduce the time delay between the input of video signal to the controller and the corresponding output. To enable low latency, you need to set the horizontal resolution loaded by a single Ethernet port less than or equal to 512 pixels. Low latency cannot be enabled with any of the following functions at the same time.● Image mirroring ● Input of interlaced SDI video sources●GENLOCK8.8.10 Color DepthSet the color depth of input source, including 8 bit, 10 bit and 12 bit.Constraints: SDI video sources do not support adjustment of input color depth. Figure 8-19 Color depthTable 8-3 Input color depth adjustmentXI 'AN N OVA S T AR T EC HVideo sources with different color depths support different input resolutions. Fordetails, see 3.2 Video Source Features.Deep Color Loop Mode AdjustWhen multiple MCTRL660 PRO units are cascaded, if the color depth of the outputvideo source on current device does not match the color depth of the video sourceinputted from the previous device, you can select this function on the previous deviceto adjust the loop output.System SettingsFigure 8-20 System settingsFactory ResetReset the controller to factory settings.Go Homepage (s)Set the time of staying on the current screen before going back to the homepagewhen no action is performed. The time range is 30s to 3600s.OLED BrightnessAdjust the brightness of the OLED menu screen on the front panel.Hardware VersionCheck the hardware version of the controller. If a new version is released, you canupdate the firmware programs in NovaLCT or SmartLCT.Communication SettingsSet the communication mode and network parameters of the MCTRL660 PRO. X I'A NN OV AS TA RT EC HC O.,LT D.。
PID控制器毕业设计外文翻译

附录一、英文原文PID controllerA proportional–integral–derivative controller (PID controller) is a genericcontrol loopfeedback mechanism(controller) widely used in industrial control systems –a PID is the most commonly used feedback controller. A PID controller calculates an "error" value as the difference between a measuredprocess variable and a desired setp oint. The controller attempts to minimize the error by adjusting the process control inputs. In the absence of knowledge of the underlying process, PID controllers are the best controllers.[1] However, for best performance, the PID parameters used in the calculation must be tuned according to the nature of the system – while the design is generic, the parameters depend on the specific system.The PID controller calculation (algorithm) involves three separate parameters, and is accordingly sometimes calledthree-term control: the proportional, the integral and derivative values, denoted P, I, and D. The proportionalvalue determines the reaction to the current error, the integral value determines the reaction based on the sum of recent errors, and the derivative value determines the reaction based on the rate at which the error has been changing. The weighted sum of these three actions is used to adjust the process via a control element such as the position of a control valve or the power supplyof a heating element. Heuristically, these values can be interpreted in terms of time: P depends on the present error, I on the accumulation of past errors, and D is a prediction offuture errors, based on current rate of change.By tuning the three constants in the PID controller algorithm, the controller can provide control action designed for specific process requirements. The response of the controller can be described in terms of the responsiveness of the controller to an error, the degree to which the controller overshoots the setpoint and the degree of system oscillation. Note that the use of the PID algorithm for control does not guarantee optimal control of the system or system stability. Some applications may require using only one or two modes to provide the appropriate system control. This is achieved by setting the gain of undesired control outputs to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence of an integral value may prevent the system from reaching its target value due to the control action.Note: Due to the diversity of the field of control theory and application, many naming conventions for the relevant variables are in common use.Control loop basicsA familiar example of a control loop is the action taken when adjusting hot and cold faucet valves to maintain the faucet water at the desired temperature. This typically involves the mixing of two process streams, the hot and cold water. The person touches the water to sense or measure its temperature. Based on this feedback they perform a control action to adjust the hot and cold water valves until the process temperature stabilizes at the desired value.Sensing water temperature is analogous to taking a measurement of the process value or process variable (PV). The desired temperature is called the setpoint (SP). The input to the process (the water valve position) is called the manipulated variable (MV). The difference between the temperature measurement and the setpoint is the error (e), that quantifies whether the water is too hot or too cold and by how much.After measuring the temperature (PV), and then calculating the error, the controller decides when to change the tap position (MV) and by how much. When the controller first turns the valve on, they may turn the hot valve onlyslightly if warm water is desired, or they may open the valve all the way if very hot water is desired. This is an example of a simple proportional control. In the event that hot water does not arrive quickly, the controller may try to speed-up the process by opening up the hot water valve more-and-more as time goes by. This is an example of an integral control. By using only the proportional and integral control methods, it is possible that in some systems the water temperature may oscillate between hot and cold, because the controller is adjusting the valves too quickly and over-compensating or overshooting the set point.In the interest of achieving a gradual convergence at the desired temperature (SP), the controller may wish to dampthe anticipated future oscillations. So in order to compensate for this effect, the controller may elect to temper their adjustments. This can be thought of as a derivative control method.Making a change that is too large when the error is small is equivalent to a high gain controller and will lead to overshoot. If the controller were to repeatedly make changes that were too large and repeatedly overshoot the target, the output would oscillate around the setpoint in either a constant, growing, or decaying sinusoid. If the oscillations increase with time then the system is unstable, whereas if they decrease the system is stable. If the oscillations remain at a constant magnitude the system is marginally stable. A human would not do this because we are adaptive controllers, learning from the process history; however, simple PID controllers do not have the ability to learn and must be set up correctly. Selecting the correct gains for effective control is known as tuning the controller.If a controller starts from a stable state at zero error (PV = SP), then further changes by the controller will be in response to changes in other measured or unmeasured inputs to the process that impact on the process, and hence on the PV. Variables that impact on the process other than the MV are known as disturbances. Generally controllers are used to reject disturbances and/or implement setpoint changes. Changes in feed water temperature constitute a disturbance to the faucet temperature control process.In theory, a controller can be used to control any process which has a measurable output (PV), a known ideal value for that output (SP) and an input to the process (MV) that will affect the relevant PV. Controllers are used in industry to regulate temperature, pressure, flow rate, chemical composition, speed andpractically every other variable for which a measurement exists. Automobile cruise control is an example of a process which utilizes automated control.PID controllers are the controllers of choice for many of these applications, due to their well-grounded theory, established history, simplicity, and simple setup and maintenance requirements.HistoryPID controllers date to 1890s governor design.[1][5] PID controllers were subsequently developed in automatic ship steering. One of the earliest examples of a PID-type controller was developed by Elmer Sperry in 1911,[6] while the first published theoretical analysis of a PID controller was by Russian Americanengineer Nicolas Minorsky, in (Minorsky 1922). Minorsky was designing automatic steering systems for the US Navy, and based his analysis on observations of ahelmsman, observing that the helmsman controlled the ship not only based on the current error, but also on past error and current rate of change;[7] this was then made mathematical by Minorsky. The Navy ultimately did not adopt the system, due to resistance by personnel. Similar work was carried out and published by several others in the 1930s.Initially controllers were pneumatic, hydraulic, or mechanical, with electrical systems later developing, with wholly electrical systems developed following World War II.Minorsky's workIn detail, Minorsky's work proceeded as follows.[8] His goal was stability, not general control, which significantly simplified the problem. While proportional control provides stability against small disturbances, it was insufficient for dealing with a steady disturbance, notably a stiff gale (due to droop), which required adding the integral term. Finally, the derivative term was added to improve control. Trials were carried out on the USS New Mexico, with the controller controlling the angular velocity (not angle) of the rudder. PI control yielded sustained yaw (angular error) of ±2°, while adding D yielded yaw of ±1/6°, better than most helmsmen could achieve.Limitations of PID controlWhile PID controllers are applicable to many control problems, and often perform satisfactorily without any improvements or even tuning, they canperform poorly in some applications, and do not in general provide optimalcontrol. The fundamental difficulty with PID control is that it is a feedback system, with constant parameters, and no direct knowledge of the process, and thus overall performance is reactive and a compromise – while PID control is the best controller with no model of the process,[1] better performance can be obtained by incorporating a model of the process.The most significant improvement is to incorporate feed-forward control with knowledge about the system, and using the PID only to control error. Alternatively, PIDs can be modified in more minor ways, such as by changing the parameters (either gain scheduling in different use cases or adaptively modifying them based on performance), improving measurement (higher sampling rate, precision, and accuracy, and low-pass filtering if necessary), or cascading multiple PID controllers.PID controllers, when used alone, can give poor performance when the PID loop gains must be reduced so that the control system does not overshoot, oscillate or hunt about the control setpoint value. They also have difficulties in the presence of non-linearities, may trade off regulation versus response time, do not react to changing process behavior (say, the process changes after it has warmed up), and have lag in responding to large disturbances.LinearityAnother problem faced with PID controllers is that they are linear, and in particular symmetric. Thus, performance of PID controllers in non-linear systems (such as HV AC systems) is variable. For example, in temperature control, a common use case is active heating (via a heating element) but passive cooling (heating off, but no cooling), so overshoot can only be corrected slowly –it cannot be forced downward. In this case the PID should be tuned to be overdamped, to prevent or reduce overshoot, though this reduces performance (it increases settling time).Noise in derivativeA problem with the Derivative term is that small amounts of measurement or process noise can cause large amounts of change in the output. It is often helpful to filter the measurements with a low-pass filter in order to remove higher-frequency noise components. However, low-pass filtering and derivative control can cancel each other out, so reducing noise by instrumentation means isa much better choice. Alternatively, a nonlinear median filter may be used, which improves the filtering efficiency and practical performance [9]. In some case, the differential band can be turned off in many systems with little loss of control. This is equivalent to using the PID controller as a PIcontroller.Feed-forwardThe control system performance can be improved by combining the feedback (or closed-loop) control of a PID controller with feed-forward (or open-loop) control. Knowledge about the system (such as the desired acceleration and inertia) can be fed forward and combined with the PID output to improve the overall system performance. The feed-forward value alone can often provide the major portion of the controller output. The PID controller can be used primarily to respond to whatever difference or error remains between the setpoint (SP) and the actual value of the process variable (PV). Since the feed-forward output is not affected by the process feedback, it can never cause the control system to oscillate, thus improving the system response and stability.For example, in most motion control systems, in order to accelerate a mechanical load under control, more force or torque is required from the prime mover, motor, or actuator. If a velocity loop PID controller is being used to control the speed of the load and command the force or torque being applied by the prime mover, then it is beneficial to take the instantaneous acceleration desired for the load, scale that value appropriately and add it to the output of the PID velocity loop controller.This means that whenever the load is being accelerated or decelerated, a proportional amount of force is commanded from the prime mover regardless of the feedback value. The PID loop in this situation uses the feedback information to effect any increase or decrease of the combined output in order to reduce the remaining difference between the process setpoint and the feedback value. Working together, the combined open-loop feed-forward controller and closed-loop PID controller can provide a more responsive, stable and reliable control system.Other improvementsIn addition to feed-forward, PID controllers are often enhanced through methods such as PID gain scheduling(changing parameters in different operating conditions), fuzzy logic or computational verb logic[10][11] . Further practicalapplication issues can arise from instrumentation connected to the controller. A high enough sampling rate, measurement precision, and measurement accuracy are required to achieve adequate control performance.Cascade controlOne distinctive advantage of PID controllers is that two PID controllers can be used together to yield better dynamic performance. This is called cascaded PID control. In cascade control there are two PIDs arranged with one PID controlling the set point of another. A PID controller acts as outer loop controller, which controls the primary physical parameter, such as fluid level or velocity. The other controller acts as inner loop controller, which reads the output of outer loop controller as set point, usually controlling a more rapid changing parameter, flowrate or acceleration. It can be mathematically proven[citation needed] that the working frequency of the controller is increased and the time constant of the object is reduced by using cascaded PID controller.Physical implementation of PID controlIn the early history of automatic process control the PID controller was implemented as a mechanical device. These mechanical controllers used a lever, spring and a mass and were often energized by compressed air. These pneumaticcontrollers were once the industry standard.Electronic analog controllers can be made from a solid-state or tubeamplifier, a capacitor and a resistance. Electronic analog PID control loops were often found within more complex electronic systems, for example, the head positioning of a disk drive, the power conditioning of a power supply, or even the movement-detection circuit of a modern seismometer. Nowadays, electronic controllers have largely been replaced by digital controllers implemented with micro controllers or FPGAs.Most modern PID controllers in industry are implemented in programmable logic controllers (PLCs) or as a panel-mounted digital controller. Software implementations have the advantages that they are relatively cheap and are flexible with respect to the implementation of the PID algorithm.Variable voltages may be applied by the time proportioning form of Pulse-width modulation (PWM) – a cycle time is fixed, and variation is achieved by varying the proportion of the time during this cycle that the controller outputs +1 (or −1) instead of 0. On a digital system the possible proportions are discrete –e.g.,incrementsof.1second within a 2 second cycle time yields 20 possible steps: percentage increments of 5% –so there is a discretization error, but for high enough time resolution this yields satisfactory performance. Alternative nomenclature and PID formsIdeal versus standard PID formThe form of the PID controller most often encountered in industry, and the one most relevant to tuning algorithms is the standard form. In this form the Kp gain is applied to the Iout, and Dout terms, yielding:WhereTi is the integral timeTd is the derivative timeIn the ideal parallel form, shown in the controller theory sectionthe gain parameters are related to the parameters of the standard form through and . This parallel form, where the parameters are treated as simple gains, is the most general and flexible form. However, it is also the form where the parameters have the least physical interpretation and is generally reserved for theoretical treatment of the PID controller. The standard form, despite being slightly more complex mathematically, is more common in industry.Laplace form of the PID controllerSometimes it is useful to write the PID regulator in Laplace transform form:Having the PID controller written in Laplace form and having the transfer function of the controlled system makes it easy to determine the closed-loop transfer function of the system.Series/interacting formAnother representation of the PID controller is the series, or interacting formwhere the parameters are related to the parameters of the standard form through , , andWith.This form essentially consists of a PD and PI controller in series, and it made early (analog) controllers easier to build. When the controllers later became digital, many kept using the interacting form.Discrete implementationThe analysis for designing a digital implementation of a PID controller in a Microcontroller (MCU) or FPGA device requires the standard form of the PID controller to be discretised [12]. Approximations for first-order derivatives are made by backward finite differences. The integral term is discretised, with a sampling time Δt,as follows,The derivative term is approximated as,Thus, a velocity algorithm for implementation of the discretised PID controller in a MCU is obtained by differentiating u(t), using the numerical definitions of the first and second derivative and solving for u(tk) and finally obtaining:二、英文翻译PID控制器一个比例,积分,微分控制(PID控制器)是一个通用的控制回路,反馈控制器被广泛应用于工业控制系统,一个PID是最常用的反馈控制器。
软件工程导论(英文)
What is software?Computer programs and associated documentation such as requirements, design models and user manuals.Software products may be developed for a particular customer or a general market.Generic product: It is a kind of software. These are stand-alone systems that are produced by a development organization and sold on the open market to any customer who is able to buy them.Customized (bespoke) products: These are systems which are commissioned by a particular customer. A software contractor develops the software especially for electronic that customers.What is software engineering?Software engineering is an engineering discipline that is concerned with all aspects of software production.What is a software process?Software processes are the activities involved in producing and evolving a software system.Generic activities:Specification - what the system should do and its development constraintsDesign and Development - production of the software systemValidation - checking that the software is what the customer wantsEvolution - changing the software in response to changing demands.what is software process model?A simplified or abstract representation of a software process, presented from a specific perspective.Generic process models describe the organisation of software processes.Including: Waterfall model, Iterative/Evolutionary development, Component-based software engineering.WaterfallCBSE /Reuse-oriented development软件描述?Software specification?The process of establishing what services are required and the constraints on the system’s operation and development. (The process of developing a software specification)主要阶段:可行性研究、需求导入和分析、需求描述、需求有效性验证。
ISPGAL22V10中文资料
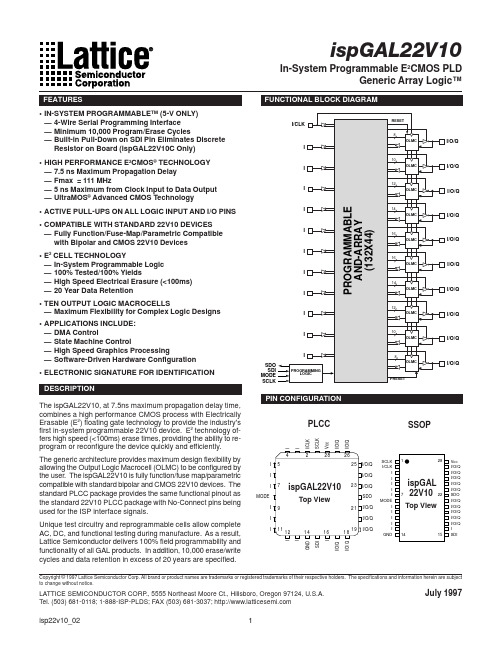
I I GND SDI I I/O/Q I/O/Q
FUNCTIONAL BLOCK DIAGRAM
I/CLK
I
I
I
I
I
I
I
I
I
SDO SDI MODE SCLK
I
PROGRAMMING LOGIC
PIN CONFIGURATION
PROGRAMMABLE AND-ARRAY (132X44)
RESET 8 OLMC
Industrial Grade Specifications
Tpd (ns) 15
Tsu (ns) 10
Tco (ns) 8
Icc (mA)
Ordering #
165 ispGAL22V10C-15LJI
ispGAL22V10C-15LKI
Package 28-Lead PLCC 28-Lead SSOP 28-Lead PLCC 28-Lead PLCC 28-Lead SSOP 28-Lead PLCC 28-Lead PLCC 28-Lead SSOP 28-Lead PLCC
4
2
28
26
I5
2 5 I/O/Q
SCLK I/CLK
1
28 Vcc I/O/Q
I
I7 MODE
I9
ispGAL22V10 Top View
I/O/Q
I
I/O/Q
I
I/O/Q
2 3 I/O/Q
I
ispGAL I/O/Q
SDO
22V10 I
I7
I/O/Q 22 SDO
MODE
I/O/Q
2 1 I/O/Q
July 1997
1.变频器控制器软件V1.0 源代码
/////////////////////**设备管理类/////////////////////using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using System.IO;public partial class设备管理{/// Defines the <see cref="DataSeries"/> visual representation to be Doughnut, split in parts.[Description("Defines the DataSeries visual representation to be Doughnut, split in parts.")]public class DoughnutSeriesDefinition : RadialSeriesDefinition{/// Identifies the <see cref="InnerRadiusRatio"/> dependency property.public static readonly DependencyProperty InnerRadiusRatioProperty = DependencyProperty.Register("InnerRadiusRatio", typeof(double),typeof(DoughnutSeriesDefinition),new PropertyMetadata(ChartDefaults.DoughnutSeriesInnerRadiusRatio, OnInnerRadiusRatioPropertyChanged));private const string InnerRadiusRatioPropertyName = "InnerRadiusRatio";/// Gets or sets the inner radius of the doughnut.///<value>The inner radius of the doughnut.</value>[Description("Gets or sets the inner radius of the doughnut.")]public double InnerRadiusRatio{get{return (double)this.GetValue(InnerRadiusRatioProperty);}set{this.SetValue(InnerRadiusRatioProperty, value);}}/// Gets the type of the <see cref="DataSeries"/> visual container.[Description("Gets the type of the DataSeries visual container.")]public override System.Type ContainerType{get{return typeof(Series);}}/// Gets the type of the <see cref="DataPoint"/>s in the <see cref="DataSeries"/>.[Description("Gets the type of the DataSeries in the DataSeries")]public override System.Type ItemType{get{return typeof(Doughnut);}}/// Creates specific IChartItem instance for this series definition type.///<returns></returns>public override IChartItem CreateChartItem(){return new Doughnut() { InnerRadiusRatio = this.InnerRadiusRatio * this.RadiusFactor };}private static void OnInnerRadiusRatioPropertyChanged(object target, DependencyPropertyChangedEventArgs args){(target as DoughnutSeriesDefinition).OnPropertyChanged(new PropertyChangedEventArgs(InnerRadiusRatioPropertyName)); }}}}/////////////////////**日志查看类/////////////////////using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using System.IO;public partial class日志查看{/// Provides data for the <see cref="GridViewDataControl.Deleted"/> event.public class GridViewDeletedEventArgs : RadRoutedEventArgs{/// Gets the data control that triggered the event.public GridViewDataControl DataControl{get;private set;}/// Gets the items that were deleted.///<value>Deleted items</value>public IEnumerable<object> Items{get;private set;}/// Initializes a new instance of the <see cref="GridViewDeletedEventArgs"/> class.///<param name="dataControl">The data control.</param>///<param name="items">The items.</param>public GridViewDeletedEventArgs(GridViewDataControl dataControl, IEnumerable<object> items){this.DataControl = dataControl;this.Items = items;}}}}/////////////////////**二次操作菜单类/////////////////////using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using System.IO;public partial class二次操作菜单{/// This class represents a factory for TransitionEffects. Its main purpose is to prevent the XBAP from throwing security exceptions. /// This approach also provides a good way to not use shader instances of the shaders.public abstract class TransitionProvider{internal void SetupTransitionAnimation(FrameworkElement targetElement,FrameworkElement currentContentPresenter,FrameworkElement oldContentPresenter,ref Storyboard animation,IEasingFunction easing,TimeSpan animationDuration,Brush oldVisualBrush,double progressFrom,double progressTo){currentContentPresenter.TestNotNull("currentContentPresenter");ShaderEffect effect = this.GetTransitionEffect();Transition transition = null;if (effect == null){////if (currentContentPresenter.ReadLocalValue(Transition.TransitionProperty) == DependencyProperty.UnsetValue)////{//// transition = this.GetTransition(currentContentPresenter, oldContentPresenter);////}////else////{//// transition = Transition.GetTransition(currentContentPresenter);//// //transition = this.CreateTransition();////}transition = this.GetTransition(currentContentPresenter, oldContentPresenter);}if (animation == null){// Create the animation.var newAnimation = animation = new Storyboard();pleted += (s, e) => OnTransitionAnimationCompleted(targetElement);}DoubleAnimationUsingKeyFrames doubleAnimation = animation.Children.OfType<DoubleAnimationUsingKeyFrames>().FirstOrDefault();if (doubleAnimation == null){doubleAnimation = new DoubleAnimationUsingKeyFrames();animation.Children.Add(doubleAnimation);}if (effect != null){SetupTransitionEffect(effect, animation, targetElement, oldVisualBrush, progressFrom);}else if (transition != null){Storyboard.SetTarget(doubleAnimation, transition);Storyboard.SetTargetProperty(doubleAnimation, new PropertyPath(Transition.ProgressProperty));transition.Progress = progressFrom;}var easingFrames = doubleAnimation.KeyFrames.OfType<EasingDoubleKeyFrame>();var start = easingFrames.FirstOrDefault();var end = easingFrames.Skip(1).FirstOrDefault();if (start == null){doubleAnimation.KeyFrames.Add(start = new EasingDoubleKeyFrame());}start.KeyTime = TimeSpan.FromMilliseconds(1);start.EasingFunction = easing;start.Value = progressFrom;if (end == null){doubleAnimation.KeyFrames.Add(end = new EasingDoubleKeyFrame());}end.KeyTime = animationDuration;end.EasingFunction = easing;end.Value = progressTo;}private static void SetupTransitionEffect(ShaderEffect effect, Timeline animation, FrameworkElement targetElement, Brush oldVisualBrush, double progressFrom){var transitionEffect = effect as TransitionEffect;// Setup transition effect animation.transitionEffect.OldSampler = oldVisualBrush;transitionEffect.Progress = progressFrom;targetElement.Effect = effect;// TODO: Try to avoid the conditions (try the WPF version for Silverlight).#if WPFStoryboard.SetTarget(animation, targetElement);Storyboard.SetTargetProperty(animation,new PropertyPath("Effect.Progress"));#elseStoryboard.SetTarget(animation, targetElement.Effect);Storyboard.SetTargetProperty(animation, new PropertyPath(TransitionEffect.ProgressProperty));#endif}[System.Diagnostics.CodeAnalysis.SuppressMessage("Microsoft.Performance", "CA1822:MarkMembersAsStatic")] internal void StopAnimation(Storyboard animation, FrameworkElement targetElement){var wasAnimationRunning = false;try{wasAnimationRunning = animation.GetCurrentState() == ClockState.Active;}catch (InvalidOperationException) { }if (wasAnimationRunning){OnTransitionAnimationCompleted(targetElement);}animation.Stop();}/// Creates a new TransitionEffect with the current settings.///<returns>A new instance of the TransitionEffect class.</returns>[System.Diagnostics.CodeAnalysis.SuppressMessage("Microsoft.Design", "CA1024:UsePropertiesWhereAppropriate")] internal ShaderEffect GetTransitionEffect(){// TODO: We prefer to use the security settings instead.#if WPFif(BrowserInteropHelper.IsBrowserHosted){return null;}#endifreturn CreateTransitionEffect();}/// Creates a new Transition with the current settings.///<returns></returns>protected virtual Transition CreateTransition(){return new FadeClrTransition();}/// Creates a new TransitionEffect with the current settings.///<returns>A new instance of the TransitionEffect class.</returns>protected abstract ShaderEffect CreateTransitionEffect();private static void OnTransitionAnimationCompleted(FrameworkElement targetElement){targetElement.ClearValue(UIElement.EffectProperty);targetElement.ClearValue(Transition.TransitionProperty);}private Transition GetTransition(FrameworkElement currentContentPresenter, FrameworkElement oldContentPresenter) {var transition = this.CreateTransition();if (transition != null){transition.Initialize(currentContentPresenter, oldContentPresenter);Transition.SetTransition(currentContentPresenter, transition);}else{currentContentPresenter.ClearValue(Transition.TransitionProperty);}return transition;}}}}/////////////////////**操作票管理、编辑器类/////////////////////using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using System.IO;public partial class操作票管理、编辑器{/// Required designer variable.private ponentModel.IContainer components = null;/// Clean up any resources being used.///<param name="disposing">true if managed resources should be disposed; otherwise, false.</param> protected override void Dispose(bool disposing){if (disposing && (components != null)){components.Dispose();}base.Dispose(disposing);}//// The LoadComponent method is raised when the ComponentEditorPage is displayed.//protected override void LoadComponent()//{// IDesignerHost host = (IDesignerHost)ponent.Site.GetService(typeof(IDesignerHost));// this.designer = host.GetDesigner(ponent) as ShortcutsDesigner;// //if (this.designer != null)// //{// //}// List<CommandBase> list = this.designer.AutoDiscoverCommands();//}//// The SaveComponent method is raised when the WindowsFormsComponentEditor is closing//// or the current ComponentEditorPage is closing.//protected override void SaveComponent()//{//}#region Windows Form Designer generated code/// Required method for Designer support - do not modify/// the contents of this method with the code editor.private void InitializeComponent(){this.groupBox1 = new System.Windows.Forms.GroupBox();mandInstanceChords = new boBox();this.button1 = new System.Windows.Forms.Button();this.groupBox2 = new System.Windows.Forms.GroupBox();this.chordKeysUI1 = new Telerik.WinControls.Keyboard.ChordKeysUI();this.groupBox4 = new System.Windows.Forms.GroupBox();this.assignedChords = new boBox();mands = new System.Windows.Forms.ListBox();this.groupBox3 = new System.Windows.Forms.GroupBox();this.groupBox5 = new System.Windows.Forms.GroupBox();bel1 = new bel();this.groupBox6 = new System.Windows.Forms.GroupBox();mandContext = new boBox();this.OkButton = new System.Windows.Forms.Button();this.CancelButtonC = new System.Windows.Forms.Button();this.AdvancedPanel = new System.Windows.Forms.Panel();this.groupBox1.SuspendLayout();this.groupBox2.SuspendLayout();this.groupBox4.SuspendLayout();this.groupBox3.SuspendLayout();this.groupBox5.SuspendLayout();this.groupBox6.SuspendLayout();this.AdvancedPanel.SuspendLayout();this.SuspendLayout();//// groupBox1//this.groupBox1.Controls.Add(mandInstanceChords);this.groupBox1.Controls.Add(this.button1);this.groupBox1.Location = new System.Drawing.Point(10, 3); = "groupBox1";this.groupBox1.Size = new System.Drawing.Size(621, 43);this.groupBox1.TabIndex = 0;this.groupBox1.TabStop = false;this.groupBox1.Text = "Shortcuts for selected command:";//// commandInstanceChords//mandInstanceChords.DropDownStyle = boBoxStyle.DropDownList; mandInstanceChords.Enabled = false;mandInstanceChords.FormattingEnabled = true;mandInstanceChords.Location = new System.Drawing.Point(6, 16); = "commandInstanceChords";mandInstanceChords.Size = new System.Drawing.Size(371, 21);mandInstanceChords.TabIndex = 2;//// button1//this.button1.Enabled = false;this.button1.Location = new System.Drawing.Point(396, 15); = "button1";this.button1.Size = new System.Drawing.Size(75, 23);this.button1.TabIndex = 1;this.button1.Text = "Remove";eVisualStyleBackColor = true;//// groupBox2//this.groupBox2.Controls.Add(this.chordKeysUI1);this.groupBox2.Location = new System.Drawing.Point(12, 193); = "groupBox2";this.groupBox2.Size = new System.Drawing.Size(267, 187);this.groupBox2.TabIndex = 1;this.groupBox2.TabStop = false;this.groupBox2.Text = "Press shortcut keys:";//// chordKeysUI1//this.chordKeysUI1.Location = new System.Drawing.Point(6, 19); = "chordKeysUI1";this.chordKeysUI1.Padding = new System.Windows.Forms.Padding(4);this.chordKeysUI1.Size = new System.Drawing.Size(254, 150);this.chordKeysUI1.TabIndex = 8;//// groupBox4//this.groupBox4.Controls.Add(this.assignedChords);this.groupBox4.Location = new System.Drawing.Point(10, 52); = "groupBox4";this.groupBox4.Size = new System.Drawing.Size(621, 41);this.groupBox4.TabIndex = 2;this.groupBox4.TabStop = false;this.groupBox4.Text = "Shortcut currently used by:";//// assignedChords//this.assignedChords.DropDownStyle = boBoxStyle.DropDownList;this.assignedChords.Enabled = false;this.assignedChords.FormattingEnabled = true;this.assignedChords.Location = new System.Drawing.Point(6, 14); = "assignedChords";this.assignedChords.Size = new System.Drawing.Size(559, 21);this.assignedChords.TabIndex = 2;//// commands//mands.FormattingEnabled = true;mands.Location = new System.Drawing.Point(6, 19); = "commands";mands.Size = new System.Drawing.Size(254, 147);mands.TabIndex = 3;mands.SelectedIndexChanged += new System.EventHandler(mandsSelectedIndexChanged);//// groupBox3//this.groupBox3.Controls.Add(mands);this.groupBox3.Location = new System.Drawing.Point(12, 12); = "groupBox3";this.groupBox3.Size = new System.Drawing.Size(267, 175);this.groupBox3.TabIndex = 4;this.groupBox3.TabStop = false;this.groupBox3.Text = "Commands found on this form:";//// groupBox5//this.groupBox5.Controls.Add(bel1);this.groupBox5.Location = new System.Drawing.Point(285, 12); = "groupBox5";this.groupBox5.Size = new System.Drawing.Size(348, 175);this.groupBox5.TabIndex = 5;this.groupBox5.TabStop = false;this.groupBox5.Text = "Command Description";//// label1//bel1.Location = new System.Drawing.Point(6, 19); = "label1";bel1.Size = new System.Drawing.Size(331, 147);bel1.TabIndex = 0;bel1.Text = "command profile";//// groupBox6//this.groupBox6.Controls.Add(mandContext);this.groupBox6.Location = new System.Drawing.Point(285, 193); = "groupBox6";this.groupBox6.Size = new System.Drawing.Size(348, 43);this.groupBox6.TabIndex = 2;this.groupBox6.TabStop = false;this.groupBox6.Text = "Execute command on:";//// commandContext//mandContext.DropDownStyle = boBoxStyle.DropDownList;mandContext.Enabled = false;mandContext.FormattingEnabled = true;mandContext.Location = new System.Drawing.Point(6, 16); = "commandContext";mandContext.Size = new System.Drawing.Size(331, 21);mandContext.TabIndex = 1;mandContext.SelectedIndexChanged += new System.EventHandler(mandContextSelectedIndexChanged); //// OkButton//this.OkButton.DialogResult = System.Windows.Forms.DialogResult.OK;this.OkButton.Location = new System.Drawing.Point(211, 502); = "OkButton";this.OkButton.Size = new System.Drawing.Size(75, 23);this.OkButton.TabIndex = 6;this.OkButton.Text = "OK";eVisualStyleBackColor = true;this.OkButton.Click += new System.EventHandler(this.OkButton_Click);//// CancelButtonC//this.CancelButtonC.DialogResult = System.Windows.Forms.DialogResult.Cancel;this.CancelButtonC.Location = new System.Drawing.Point(314, 502); = "CancelButtonC";this.CancelButtonC.Size = new System.Drawing.Size(75, 23);this.CancelButtonC.TabIndex = 7;this.CancelButtonC.Text = "Cancel";eVisualStyleBackColor = true;this.CancelButtonC.Click += new System.EventHandler(this.CancelButtons_Click);//// AdvancedPanel//this.AdvancedPanel.Controls.Add(this.groupBox1);this.AdvancedPanel.Controls.Add(this.groupBox4);this.AdvancedPanel.Location = new System.Drawing.Point(2, 386); = "AdvancedPanel";this.AdvancedPanel.Size = new System.Drawing.Size(644, 100);this.AdvancedPanel.TabIndex = 8;this.AdvancedPanel.Visible = false;//// ChordsMappings//this.AcceptButton = this.OkButton;this.AutoScaleDimensions = new System.Drawing.SizeF(6F, 13F);this.AutoScaleMode = System.Windows.Forms.AutoScaleMode.Font;this.ClientSize = new System.Drawing.Size(650, 532);this.Controls.Add(this.AdvancedPanel);this.Controls.Add(this.CancelButtonC);this.Controls.Add(this.OkButton);this.Controls.Add(this.groupBox6);this.Controls.Add(this.groupBox5);this.Controls.Add(this.groupBox3);this.Controls.Add(this.groupBox2); = "ChordsMappings";this.Text = "ChordsMappings";this.FormClosing += new System.Windows.Forms.FormClosingEventHandler(this.ChordsMappings_FormClosing);this.Load += new System.EventHandler(this.ChordsMappingsLoad);this.groupBox1.ResumeLayout(false);this.groupBox2.ResumeLayout(false);this.groupBox4.ResumeLayout(false);this.groupBox3.ResumeLayout(false);this.groupBox5.ResumeLayout(false);this.groupBox6.ResumeLayout(false);this.AdvancedPanel.ResumeLayout(false);this.ResumeLayout(false);}#endregionprivate System.Windows.Forms.GroupBox groupBox1;private System.Windows.Forms.GroupBox groupBox2;private System.Windows.Forms.GroupBox groupBox4;private System.Windows.Forms.ListBox commands;private System.Windows.Forms.GroupBox groupBox3;private System.Windows.Forms.Button button1;private System.Windows.Forms.GroupBox groupBox5;private bel label1;private System.Windows.Forms.GroupBox groupBox6;private boBox commandContext;private boBox assignedChords;private boBox commandInstanceChords;private System.Windows.Forms.Button OkButton;private System.Windows.Forms.Button CancelButtonC;private ChordKeysUI chordKeysUI1;private System.Windows.Forms.Panel AdvancedPanel;}}}/////////////////////**开始/停止自动召测类/////////////////////using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using System.IO;public partial class开始/停止自动召测{/// Event args for the drag events in RadBook.public class DragStartedEventArgs : EventArgs{/// Initializes a new instance of the <see cref="DragStartedEventArgs"/> class.///<param name="draggedCorner">The dragged corner.</param>///<param name="mousePosition">The mouse position.</param>public DragStartedEventArgs(FoldPosition draggedCorner, Point mousePosition) {this.DraggedCorner = draggedCorner;this.MousePoint = mousePosition;}/// Gets or sets the dragged corner.///<value>The dragged corner.</value>public FoldPosition DraggedCorner { get; set; }/// Gets or sets the mouse point.///<value>The mouse point.</value>public Point MousePoint { get; set; }}}}/////////////////////**主变压安全保护终端信息的查询类/////////////////////using System;using System.Collections.Generic;using System.Linq;using System.Text;using System.Windows;using System.Windows.Controls;using System.Windows.Data;using System.Windows.Documents;using System.Windows.Input;using System.Windows.Media;using System.Windows.Media.Imaging;using System.Windows.Navigation;using System.Windows.Shapes;using System.IO;public partial class主变压安全保护终端信息的查询{/// Gets or sets the sort comparer.///<value>The comparer.</value>public override IComparer<TDataItem> Comparer{get { return parer; }set{if (parer != value){parer = value;this.indexer = new AvlIndex<TDataItem>(this);this.groupBuilder = new GroupBuilder<TDataItem>(this.indexer);this.OnNotifyPropertyChanged(new PropertyChangedEventArgs("Comparer"));}}}/// Gets or sets the group comparer.///<value>The group comparer.</value>public override IComparer<Group<TDataItem>> GroupComparer{get{return parer;}set{parer = value;}}/// Gets the groups.///<value>The groups.</value>public override GroupCollection<TDataItem> Groups{get { return this.groupBuilder.Groups; }}/// Gets or sets the group predicate.///<value>The group predicate.</value>public override GroupPredicate<TDataItem> GroupPredicate{get{return this.groupBuilder.GroupPredicate;}set{if (this.groupBuilder.GroupPredicate != value){this.groupBuilder.GroupPredicate = value;this.OnNotifyPropertyChanged(new PropertyChangedEventArgs("GroupPredicate")); }}}/// Gets the default group predicate.///<value>The default group predicate.</value>public override GroupPredicate<TDataItem> DefaultGroupPredicate{get{return this.groupBuilder.DefaultGroupPredicate;}}/// Gets or sets a value indicating whether this data view can filter.///<value>///<c>true</c> if this instance can filter; otherwise, <c>false</c>.///</value>[DesignerSerializationVisibility(DesignerSerializationVisibility.Hidden)]public override bool CanFilter{get { return this.canFilter; }internal set{if (this.canFilter != value){this.canFilter = value;this.OnNotifyPropertyChanged(new PropertyChangedEventArgs("Filter"));}}}/// Gets or sets a value indicating whether this data view can group.///<value><c>true</c> if this instance can group; otherwise, <c>false</c>.</value>[DesignerSerializationVisibility(DesignerSerializationVisibility.Hidden)]public override bool CanGroup{get { return this.canGroup; }internal set{if (this.CanGroup != value){this.canGroup = value;this.OnNotifyPropertyChanged(new PropertyChangedEventArgs("GroupDescriptors")); }}}/// Gets or sets a value indicating whether this data view can sort.///<value><c>true</c> if this instance can sort; otherwise, <c>false</c>.</value>[DesignerSerializationVisibility(DesignerSerializationVisibility.Hidden)]public override bool CanSort{get { return this.canSort; }internal set{if (this.canSort != value){this.canSort = value;this.OnNotifyPropertyChanged(new PropertyChangedEventArgs("SortDescriptors")); }}}#endregion#region Methodspublic override int IndexOf(TDataItem item){int index = base.IndexOf(item);while (index >= 0 && !this[index].Equals(item)){index++;if (index >= this.Count){return -1;}}return index;}public override TDataItem Find(int itemIndex, object dataBoundItem){if (!this.HasDataOperation){return base.Find(itemIndex, dataBoundItem);}TDataItem result = default(TDataItem);//TODO: Think of a look-up semantic by data-bound item//IAvlEnumerator<TDataItem> en = this.indexer.GetAvlEnumerator();//while (en.MoveNext())//{// if (object.Equals(en.Current.DataBoundItem, dataBoundItem))// {// result = en.Current;// break;// }//}//en.Dispose();return result;}#endregion#region Internalprotected override void RefreshOverride(){if (this.IsInUpdate){this.EnsureDescriptorIndex();return;}RebuildData(true);}protected override IList<TDataItem> Items{get{return this.indexer.Items;}}protected override void OnNotifyPropertyChanged(PropertyChangedEventArgs e){base.OnNotifyPropertyChanged(e);if (e.PropertyName == "FilterExpression" ||e.PropertyName == "Filter" ||e.PropertyName == "SortDescriptors" ||e.PropertyName == "Comparer" ||e.PropertyName == "GroupDescriptors" ||e.PropertyName == "GroupPredicate"){RefreshOverride();}}protected override void ProcessCollectionChanged(NotifyCollectionChangedEventArgs args){if (!this.HasDataOperation){//this.view = this.sourceList;//this.readOnlyGroups = this.GroupFactory.CreateCollection(new ObservableCollection<Group<TDataItem>>()); }bool notify = false;switch (args.Action){case NotifyCollectionChangedAction.Add:notify = AddItem((TDataItem)args.NewItems[0]);break;case NotifyCollectionChangedAction.Remove:notify = RemoveItem(args);break;case NotifyCollectionChangedAction.Replace:notify = ReplaceItem(args);break;case NotifyCollectionChangedAction.Move:notify = MoveItem(args);。
开放式工业自动化控制系统的软件框架

开放式工业自动化控制系统的软件框架2282007,43(13)ComputerEngineeringandApplications计算机工程与应用开放式工业自动化控制系统的软件框架易凡,徐华,王家廒,贾培发YIFan1,2XUHua1,2WANGJia—xin1,2JIAPei—fa,1.清华大学智能技术与系统国家重点实验室.北京1000842.清华大学计算机科学与技术系,北京1000841.StateKeyLabofIntelligentTechnologyandSystems,TsinghuaUniversity,Beijing10008 4,China2.DepartmentofComputerScienceandTechnology,TsinghuaUniversity,Beijing100084, ChinaE-mail:yi-f04@.anYIFan,XUHua,WANGJia—xin,etal?Softwareframeworkofopencontrolsystemsforindustrialautomation?Computer EngineeringandApplications,2007,43(13):228-232.Abstract:Thispaperproposesasoftwareframeworkofopencontrolsystemsforindustrialaut omation,OCSIAsoftwareframeworkforshort,whichhashierarchicalarchitectureandcomprisesbasedrivelayer,corecontrollaye randsupervisoryapplicationlayerfrombottomtotop.Basedrivelayerisresponsiblefordirectdrivingphysicaldevicesofvariou skindsofinterfacetypesincludingserialport,parallelportandfieldbus,and,providestoptwolayerswithHardwareIndependent Interfaceintheformofchannelsasadataserver.Corecontrollayerachievesindirectcontrolofphysicaldevicesbycommunica tingwithbasedriverlayerthroughchannels,monitorssystemstatusesinread—timemodeandpostsalarminform~iontosupervisoryapplicationlayerwhenanexceptionalstatusOCCUrs.Supervisoryapplicationlayerprovidesinteractiveinterfacesbe tweensystemsupervisorandsystem, facilitatessystemsupervisortosuperviseandcontrolthewholesysteminreal-timemode.The correctnessandfeasibilityofOCSIA softwareframeworkisvalidatedbydesigningandimplementinganinstancemodelofatransf ercontrolsystem.Keywords:opencontrolsystems;softwareframework;industrialautomation摘要:提出了一种用于工业自动化领域的开放式控制系统软件框架.简称OCSIA 软件框架.OCSIA软件框架具有层次化结构,从低到高依次是基础驱动层,核心控制层和监管应用层.基础驱动层负责直接驱动包括串口,并口,现场总线等各种接口类型的物理设备.并作为数据服务器.以通道的形式向上层提供硬件无关接口.核心控制层通过通道与基础驱动层通信,实现对物理设备的间接控制:并实时监测系统状态,在系统状态发生异常时,向监管应用层发送报警信息.监管应用层提供系统监管人员与系统的交互接口.方便系统监管人员对系统运行环境的实时监视和控制.通过设计和实现一个传输控制系统的实例模型验证了OCSIA软件框架的正确性和可行性.关键词:开放式控制系统;软件框架;工业自动化文章编号:1002—8331(2007)13—0228—05文献标识码:A中图分类号:TP3l11引言我国正在走一条"以工业化带动信息化.以信息化促进工业化"的新型工业化道路.快速发展的信息技术在工业中的广泛应用能够显着提高工业生产的效率和效益.更快,更好地促进工业的现代化建设.工业自动化是工业信息化建设中的一个重要方面,自动化控制系统是自动化硬件设备和自动化软件系统的总称.由于世界上不同设备供应商提供的硬件设备纷繁复杂.有些甚至不相兼容.如何构建一个软件系统来有效集成工业自动化系统中所需的各种硬件设备成为一个关键问题.开放式控制系统l1_,包括四个特性:可扩展性,互操作性,可移植性和可伸缩性,能够较好解决上述问题.在开放式控制系统的研究中,影响较大的包括美国的O.MAC,日本的OSEC和欧洲的OSACA.其中,欧洲OSACAm是用于FA系统的一种参考平台.PC—ORC[1是基于OSACA参考模型提出的一种开放式机器人控制系统参考平台,包括硬件平台,操作系统模块和应用软件模块三个层次,并在应用软件模块中根据功能不同,进一步细分出管理模块,应用编程接口模块和网络模块三个子组件.RT0CH是基于OSACA参考平台和PC—ORC参考模型提出的一种基于RTLinux的开放式控制系统.整个系统采用层次化,模块化设计,结构清晰,便于二次开发.具有开放式控制系统的多种特性.随着信息技术的快速革新,一些标准化技术已经应用到开放式工厂自动化系统的构建中.其中包括Linux开放源码操作系统,面向对象软件工程,平台无关的Java编程语言,基于Web的信息发布等,以及其他一些规范和标准,如SQL语言方便了数据的存储,查询和管理,OPC(OLEforProcessContro1)和XML语言使得系统中不同应用程序间可以正确地交互,现场总线技术方便了智能现场设备间的快速互联和通信.Mi.和C#语言也为这一领域带来了新的机遇[61.易凡,徐华,王家廒,等:开放式工业自动化控制系统的软件框架2007,43(13)229 以RTOC~为参考.本文提出了一种具有层次化结构的开放式工业自动化控制系统OCSIA(OpenControlSystemsfor IndustrialAutomation)的软件框架.这个软件框架具有基础驱动层,核心控制层和监管应用层三个层次,能够为工业自动化控制系统的开发提供一个良好的框架支持.本文第2部分简要介绍面向对象方法学,设计模式和框架,第3部分概述这一层次化软件框架的结构特点和各层次的功能,第4部分详述这一软件框架各层次构设计思想,第5部分通过一个简单的实例模型验证这一软件框架的可行性,第6部分给出本文的总结和对未来工作的展望.2面向对象,设计模式和框架本部分简要介绍系统软件开发中经常用到的面向对象方法学,设计模式和框架技术.面向对象(Object—Oriented,O0)方法学17]是软件开发方法的一个重要里程碑,是一种新颖的,更符合人类思维习惯的思维解题方法.面向对象方法学的出发点和基本原则是尽可能模拟人类习惯的思维方式,使开发软件的方法与过程尽可能接近人类认识世界解决问题的方法与过程,也就是使描述问题的问题空间(问题域)与实现解法的解空间(求解域)在结构上尽可能一致.面向对象程序设计方法把程序分解为许多对象,不同对象之间通过发送消息向对方提出服务要求,接受消息的对象主动完成指定功能.程序中的所有对象分工协作,共同完成整个程序的功能.面向对象方法的主要优点是,接近人类习惯的思维方法,稳定性好,复用性好和可维护性好.设计模式(DesignPatterns)is]是对面向对象程序设计实践中优秀设计经验的精炼总结,提供较面向对象方法学更高层次的复用性.设计模式针对面向对象系统中一类重要的和重复出现的设计问题,提出一个通用的设计方案,并予以系统化的命名和解释,描述了问题,解决方案,在什么条件下使用该解决方案及其效果.设计模式使面向对象设计更加灵活,典雅,最终复用性更好.框架(Framework)[81是针对一个特定的应用领域,构建的具有一组相互协作的类的可复用软件设计.它定义了软件整体结构,类和对象的划分,各部分的主要职责,对象之间怎么协作,以及相应的控制流程.框架预定了这些设计元素,以便于特定应用开发人员能够集中精力于应用本身的特定细节和逻辑,通过继承框架中的类和组合其实例来定制该框架以生成特定的应用.框架的设计经常使用多种设计模式,以获得高层次的设计复用和代码复用.框架是某一应用领域的共同设计决策,能够使该领域中多种不同应用复用同一个框架,具有面向对象方法学中最高层次的复用性.3OCSIA软件框架概述参考RTOC~,提出了一种层次化OCSIA软件框架.本部分将概述OCSIA软件框架的层次结构特点,以及各层次的功能. 图1虚线以上部分为OCSIA软件框架的层次图.由图可以看出,OCSIA软件框架包括基础驱动层,核心控制层和监管应用层j=个层次基础驱动层处于OCSIA软件框架的最底层,封装物理设备驱动程序,向下与物理设备层进行通信,实现对不同物理设ocsIA软件框架图1OCSIA总体层次图备的直接I/O控制功能,包括读取设备状态(各种传感器信息),发送数据给执行器(Actuator),以产生相应的硬件动作.基础驱动层向上提供一个硬件无关接口(HardwareIndependent Interface,HII),接收来自核心控制层的请求,向其返回设备状态信息,或发送数据到执行器.核心控制层处于OCSIA软件框架的中间层,是整个软件控制系统的核心部分,其主要功能是保证整个系统安全,可靠地运行.它通过基础驱动层为其屏蔽底层各式各样的硬件设备,并通过基础驱动层提供的硬件无关接口实现对底层物理设备的一致,间接I/O控制.核心控制层向上接收来自监管应用层的高层命令,必要时在内部进行适当分割,经过调度后与基础驱动层进行通信,进而实现对物理设备的控制.核心控制层还负责对系统状态进行实时监测,一旦发现系统处于不安全状态或控制命令不具备执行条件,则自动执行校正动作,把系统重新恢复到安全状态,或立即向上层发送报警信息,等待使用监管应用层软件的系统监管人员对系统进行干预,并在接收监管人员的命令后执行相应的动作.以防止人员的伤亡或设备的损坏.同时,核心控制层过滤系统状态信息,向监管应用层反馈必要的系统状态信息.监管应用层处于OCSIA软件框架的最高层,提供系统监管人员与系统之间的交互接口,方便系统监管人员对系统运行环境的实时监视和控制,以及其他一些相关操作,如完成先进过程控制(AdvancedProcessControl,APC)的功能.监管应用层接收来自核心控制层的运行状态数据和报警信息,动态更新交互界面.同时向核心控制层发送系统监管人员的控制命令.在图1所示的OCSIA软件框架层次图中,监管应用层和基础驱动层之间有一条虚线连接.实现监管应用层和基础驱动层之间的直接通信.这样监管应用层不必经过核心控制层.可以直接对系统中各种过程数据或工艺参数进行高效采集,实现运行时过程控制优化.在各层次软件中,将监管应用层程序配置在工厂主机中,核心控制层程序和基础驱动层程序配置在工控机中,基础驱动层程序所在的工控机通过串口,并口,现场总线等通信接口与受控设备进行物理连接,工厂主机和工控机通过高速以太网互联,实现各层次程序的相互通信,具体硬件连接关系如图2所示.l监管应用层{l核心控制层{l程序il程序i图2OCSIA硬件连接关系图2302007,43(13)ComputerEngineeringandApplications计算机工程与应用图2所示的核心控制层程序和基础驱动层程序配置在不同的工控机中,为了进一步提高系统的性能,加快系统响应速度,完全可以将核心控制层程序和一个或多个基础驱动层程序配置在同一台工控机中,以避免核心控制层和基础驱动层之间的网络通信,通过直接在同一台工控机内部相互通信.有效减少通信时间4OCSIA软件框架设计思想本部分将详述OCSIA软件框架各层次的设计思想.4.1基础驱动层基础驱动层负责与各种不同类型受控设备进行直接I/0控制,并向上层提供一个硬件无关接口,如何实现这个硬件无关接口就成为一个关键问题.控制软件最根本的功能是实现对各种不同类型受控设备进行控制和监测,尽管各种类型受控设备控制方式不尽相同. 但它们都可以看成由多个能够进行输人和输出操作的I/0单元组成,这些I/O单元称为I/O点.I/O点提供了一个很好的抽象方式,在基础驱动层以上使用通道(Channe1)对物理设备I/O 点进行抽象.根据I/O单元数据承载方式的不同,可以大致分为离散型通道(例如开关),连续型通道(例如压力传感器)和字符串型通道(如可以接收字符串的智能设备):根据I/O单元的I/0特性,可以分为只读型通道(如各种传感器),只写型通道(如各种执行器),读写型通道(如具有一个传感器和一个执行器的阀门).这样通过建立各种不同数据承载方式和不同I/O 特性的通道,就可以对各种不同类型的设备进行抽象.得到一个称为通道的硬件无关接口.基础驱动层以上的核心控制层和监管应用层看到的是一个经过抽象的通道,它们可以根据通道的特性读取或设置对应物理设备的I/O点,实现对物理设备的一致,间接的控制方式.在OCSIA软件框架中,基础驱动层相当于一个具有各种通道的数据服务器,而核心控制层和监管应用层则相当于一个数据客户端.它们请求数据服务器的服务. 其服务可以看成读取或设置其所拥有的通道.基础驱动层需要处理各种接口类型的受控设备,包括串口(RS一232/422/485),并口,现场总线(如CAN,DeviceNet,Sercos 等),或者对受控设备进行DirectIO.基础驱动层设计为一个10驱动库,使驱动开发人员能够使用10驱动库方便,快捷地开发出与工控机相连接的各种特定受控设备的驱动程序.这就需要驱动库支持串口,并口,现场总线等不同通信协议,以便支持对连接的各种类型设备的控制.通道的概念实际上已经超出了其用于抽象受控设备I/0点的范围,可以用来表示实际受控设备中并不存在的虚拟I/0 点.这种表示虚拟I/O点的通道不妨称之为高级通道.而表示受控设备实际I/0点的通道称为初级通道.高级通道可以通过初级通道运算而来,例如一个设备只能给出速度信号,那么可以定义一个Velocity初级通道.如果在具体应用中需要获取一个加速度信息,那么可以在基础驱动层再定义一个Accelera. tion高级通道,它通过Velocity通道信息经过运算得来.同时, 为了充分利用一些硬件资源,核心控制层可以向基础驱动层传递一个字符串类型的高级通道表示的非初级控制命令.基础驱动层收到这一非初级命令后调用相应的硬件资源完成控制任务.通过这一方式,使得各层次的硬件,软件资源得到充分利用,性能配置达到最优.在图3所示的基础驱动层软件结构图中.圆角方框为10驱动库的软件部分,直角方框为驱动开发用户在10驱动库之上开发的软件部分.10驱动库部分包括通信接口,调度模块, 各种类型受控设备的标准驱动模块(包括串口标准驱动,并口标准驱动和各种现场总线标准驱动等).以及其他特定驱动库. 为便于驱动非串口,并口或现场总线的特定受控设备,可以从设备供应商那里取得相应的驱动程序库,并将其添加到10驱动库中,以便可以被用户创建的驱动例程调用完成I/O操作.通信接口设备无关接El(通道)用户驱动例程调度模块用户驱动例程/\用户驱动例程/\——————一—L,\————i——一串El标准驱动)…r并El标准驱动现场总线标准驱动其他特定驱动库图3基础驱动层软件结构图驱动开发用户在10驱动库之上开发的软件包括:建立基础驱动层程序所包含的所有通道.并根据每个通道的I/O特性,调用10驱动库中标准驱动模块或设备供应商提供的特定设备驱动库,编写通道驱动例程实现通道的读或写.4.2核心控制层核心控制层的主要功能是接收来自监管应用层的高层控制命令.与基础驱动层通信完成对目标设备的控制,在控制命令不满足执行条件时向监管应用层发送报警,等待系统监管人员的操作,并根据监管人员的操作执行相应的动作;同时实时监测系统的运行环境状态.如果系统处于不安全状态.自动执行相应的系统校正动作.或向监管应用层发送报警.等待监管人员对系统的控制.在OSACAI】参考模型中,控制任务分解成通过通信子系统相互协作的体系结构对象(ArchitectureObject,AO),每个AO作为应用模块完成独立的控制功能.在PC—ORO33参考模型中,控制对象(ControlObject,CO)代表软件中控制实际制造设备的组件.它应该与硬件无关,可以通过对COs属性指定新值来构建适应于新的制造环境的整个控制系统.由此可见,在OS—CAR和PC—ORC参考模型中.均抽象出一个用于完成独立控制功能的对象.在核心控制层软件中,也抽象出一个Con.trolObject(CO)抽象类,每个从CO派生的具体CO类包含1个或多个相关的控制服务,每个控制服务可以完成一个特定的控制功能.监测任务的实现,我们抽象出一个MonitorObject(MO)抽象类,每个从MO类派生的具体MO类实时监测一个特定的系统状态,这个系统状态出现异常,则自动执行相应的校正动作,或向监管应用层发送报警信息.核心控制层抛出的报警可以分为两类,阻塞报警和非阻塞报警:阻塞报警用于异常状态较为严重的情形,抛出报警的CO的一个控制服务必须阻塞运行,等待系统监管人员的干预,并根据系统监管人员的干预结果执行相应的动作:非阻塞报警用于异常状态不会引起负面结果的情形,这种情况下抛出报警的CO的一个控制服务或MO的监测任务不需阻塞运行,仅仅发送一个报警提醒系统监管人易凡,徐华,王家废,等:开放式工业自动化控制系统的软件框架2007,43(13)231 员发生了一个状况.为实现报警功能,抽象出了一个Alarm抽象类,从Alarm抽象类派生出BlockingAlama和Un.blockingAlarm两个具体类,分别表示阻塞报警和非阻塞报警.在图4所示的核心控制层软件结构图中,包括核心控制类库和在核心控制类库之上开发的特定核心控制层程序.图4中,上层通信接口负责与监管应用层进行通信,下层通信接口负责和基础驱动层进行通信.核心控制层操作的基础对象是通道,包括控制子系统,监测子系统,报警子系统,日志子系统,以及标准算法库.控制子系统的组成元素是控制对象,每个控制对象包含多个控制服务.控制对象作为一个服务器,向其他作为客户端的控制对象提供服务.这些控制对象在逻辑上具有层次结构:最下层的控制对象用来抽象一个实际物理设备,并提供操作相应物理设备的控制服务,这些服务通过读/写与此设备相关联的通道来实现;中间层的控制对象用来实现一个完整的控制功能.如对物理真空系统的控制,这些控制对象调用下层对象的控制服务来实现自己的服务;最上层的控制对象.调用功能层的服务来为上层用户提供服务接口监测子系统的基本组成元素是监测对象,它们通过检测通道值对系统状态进行实时监视,在遇到异常情况时将会发出报警.报警子系统定义了许多报警对象,用于表示系统中可能出现的异常情况.并提供相应的恢复选项.日志子系统有选择地提取通道值生成日志记录,并记录核心控制层程序运行时的系统信息,方便程序的调试.标准算法库包含经常使用的路径规划,动力学计算,PID 控制,模糊控制等标准算法,供控制对象在需要时调用核心控制类库图4核心控制层软件结构图特定的核心控制层程序在核心控制类库的基础上进行开发,主要的软件开发工作包括:创建具有逻辑层次结构的控制对象,创建监测对象和报警对象.建立控制对象,监控对象所需要访问的通道;实现控制对象所支持的控制服务,实现监测对象的监测任务,设定日志记录时提取的通道4_3监管应用层监管应用层是系统监管人员和整个系统的接口.通过提供图形化界面,方便系统监管人员启动,中止各种控制任务,实时监视系统运行情况,对系统发出的报警做出干预,并在系统发生故障时通过GUI对系统进行维修,对从系统中收集上来的各种数据进行分析,优化参数配置,实现运行时的过程控制优化.由于不同的工业自动化应用具有不同的监管需求.因而监管应用层需要提供开发人员根据需求定制监管GUI的功能:同时在运行时,能够动态显示定制的监管GUI,支持与系统监管人员之间的交互,完成相关监管功能.因而监管应用层应该具有开发和运行时两个紧密相关的功能.在如图5所示监管应用层软件功能结构图中,监管应用层软件具有两个软件实体:GUI图形化开发工具和运行时支撑环境. 监管应用层:囹一标准及定制模板文件f界面模板库tJ∥———一l图形化I开发工具I图5监管应用层软件功能结构图在开发阶段.GUI图形化开发工具需要用到一些标准界面元素和模板来定制满足特定需求的监管GUI,同时GUI开发人员也可以使用数据库中的标准界面元素进一步定制复合界面元素,并存储在数据库中对标准界面模板库进行扩充,从而形成一个标准及定制界面模版库.GUI开发人员在定制监管GUI 时,需要实现GUI界面元素和核心控制层通道以及控制对象中控制服务的绑定,同时指定需要采集的来自基础驱动层的通道数据,将定制的GUI及绑定关系保存在一个模版文件中.以便运行时动态加载到内存中.当整个控制系统启动时,运行时支撑环境根据数据库中存储的工艺参数通过与基础驱动层通信实现对相关设备参数的配置,动态加载定制的GUI模版文件并在屏幕上显示出来在系统启动完成后,运行时支撑环境获取监管GUI显示的来自核心控制层的通道数据以及可能产生的报警信息,使用这些数据信息动态刷新GUI;通过响应系统监管人员的交互事件.向核心控制层发送控制命令:同时采集来自基础驱动层的各种通道数据,存储在数据库中,用于运行时的数据变化趋势显示.通过数据分析进行运行时过程控制优化.监管应用层开发人员需要的开发工作包括:使用图形化工具设计监管GUI,实现界面元素和通道的绑定.设定界面元素的动态显示逻辑,以及实现界面元素和核心控制层控制对象中控制服务的绑定在开发阶段定制的监管GUI的运行,由运行时支撑系统负责解释,按照定制的GUI模版文件,用运行时系统状态的实时信息动态刷新监管GUI.5一个实例模型为了验证OCSIA软件框架的可行性,设计了一个简单的实例模型.5.11实例模型简介这个实例模型是一个简单的工件传输系统.模型中有两个单元,分别是传输单元和加工单元,传输单元内有一个用于传输工件的传输机械手.每个单元都有一个压力传感器和温度传感器,用于感知单元内的温度和压力条件.两个单元之间有一个门阀,用于工件加工时隔离两个单元.主要操作流程是:传输单元的传输机械手取得未加工工件,打开门阀,机械手伸展将工件传输到加工单元,机械手收缩,关闭门阀;加工单元加工完毕工件后,打开门阀,传输机械手伸展将加工完毕的工件从加工单元中取出,机械手收缩,关闭门阀2322007,43(13)ComputerEngineeringandApplw~ions计算机工程与应用在工件加工和传输过程中,需要保持两个单元始终处于低真空状态.另外,模型系统需要满足一些互锁条件.如当两个单元压力不相同时.不能打开门阀等.5.2实例模型实现用软件仿真这些设备.在系统运行时可以通过软件控制台对系统的各状态信息进行设置,如压力,温度等.选用C#.NET来创建提出的OCSIA软件框架.并在软件框架之上实现这个传输控制系统.由于不对实际硬件设备进行I,O操作.只通过软件仿真这些设备,因而OCSIA软件框架的基础驱动层通过调用设备仿真软件的API.完成对虚拟设备的控制.OCSIA软件框架的应用监管层,我们使用WindowsAppli—cation来设计交互界面,并实现界面控件元素与通道以及中间层控制对象中控制服务的绑定.编写界面元素的动态显示逻辑.在OCSIA软件框架的核心控制层.我们创建C#类库项目来实现核心控制类库.然后,基于核心控制类库,实现上述传输控制系统的核心控制层软件.在图6所示的核心控制层软件UML类图中.灰色框内是核心控制层类库(主要部分),灰色框之外是为实现传输控制系统所派生的类(部分).图6核心控制层软件UML类图在核心控制类库中.抽象类ControlObject是对执行多个相关控制任务的对象的抽象.抽象类MonitorObject是对执行监测任务的对象的抽象.控制任务和监测任务的执行都依赖于ControlThread类,ControlThread类是控制任务和监测任务执行的线程(Thread).单体(Singleton)模式对象ControlThreadPool包含多个ContmlThread对象,对它们进行管理.ControlObject对象和MonitorObject对象向ContmlThreadPool对象请求Con—trolThread,以便在其中执行控制任务或监测任务.抽象类Channel是对通道概念的抽象,其派生出的两个抽象类Discrete Channel和ContinuousChannel是对离散型通道和连续型通道的抽象.DiscreteChannel的两个具体派生类DiscIeteReadonlv—Channel和DiscreteReadWriteChanne1分别是对具有只读和读, 写特性的离散型通道的抽象.抽象类Alarm是对报警的抽象.。
专业外语
puter is made of both (slw)&(hlw).2.(Generic/General)&(Customized) are the two types of slw product.3.Air-traffic contral-software is example for (customized) slw product.4.CAD slw is example for (Geneic) slw product.5.System slw other called (operating system).6.Identify customer's needs is call (requirement).7.Primary goal of design is (optimization).8.Documents written for program or Technical staff is called (specification).9.Each requirements describes somthing actually needed by the (customer).10.(Function) is described as a set of inputs,behavior & outputs.11.The goal of a designer is to produce a (Blueprint/model).12.Requirements are (Translate) into a blueprint in design.13.Output of slw design is (Design model).14.Refinement is actually a process of (Elaboration).15.Quality of the final product depends on (good design).16.(Compiler) & (Interpreter) are the two types of translator using in high level language.17.(Machine) language is difficult for humans to humans to read & understand.18.(Interpreter) is a translator for translates a sigle line of program at a time .puting systems embedded with in (electronic device).20.(Assembler) is used to translate Assembly language into machine language.21.The difference between expected & actual result is called (Bug).22.(Uint) is the smallest testable part of an application.23.(UAT) level of testing gives the end user confidence.24.The another name of Black Box testing is known as (functional testing techniques/ behavioral testing techniques).25.The another name of White Box testing is known as (code based testing techniques / structural testing techniques).26.Mistake made by programmer is called (error).27.Majority of the application are tested by (Black Box testing).28.White Box testing can be applicated at the (lower) levels of testing.1.Slw reuse:slw reuse is the process of creating slw from Existing slw what can be reused.ability:ease to learn & remember.3.Maintainability:ease to maintain the product.4.Reliability:conditions for a specifed period of time.5.Portability:easy to carry the product.6.Security:process to handle a growing amount of work.7.Scalability:process to handle a growing amount of work.8.Safety:The condition of being protected against physical.1.What are the characteristics of goal slw?Functionity & performance to user & should be maintaintainable,dependable,usable.2.What are the fundamental slw engineering activities?(1)Requirements (2)Design/Development (3)Testing (4)Validation (5)evolution3.Difference between slw engineering and conputer science?Software engineering:Developing & Delivering useful slw to the customer.Computer science:Theory & fundamentals.4.Define slw product?Particular customer and geeral market.5.Define slw process?Set of activities required to develop the slw.pare system slw & application slw?system slw : helps run the computer hardware & computer systems.application slw : gives more prower to the system.7.What is requirements?Means Documents for customer.8.Write the difference between requirement analysis & specification?Requirement Analysis:The process of studying&analyzing the customer and the use needs and written for customer.Requirement specification:A documents that clearly&Exactly describesfunction,performance&design limitation and for programmer.pare:Requirements and Design.1.Define user requirement?Statements in natural language,plus diagrams of the services,operational constructs.2.Define system requirements?Detailed descriptions of the system function,services,operational constructs.3.Define functional requirements?Describing the behavior/use of the system.4.Define non-functional?How the system should behavior.5.What is Design?Which requirements are translated into a blueprint.6.What are the different types of design model?(1)Interface design(2)Date design(3)Architecture design(4)Procedure design7.Explain the different types of design model?(1)Interface design: describe how the software communicates with users.(2)Date design: transforms the information domain model into date structures.(3)Architecture design: Defines the relationship among major structural elements of the program.(4)Procedure design: transforms structural elements of the program architecture into a procedural descripition of software components.8.Write the Design principles.(1)The design should be traceable to the analysis model.(2)The design should"minimize the intellectual distance"between the software and the problem in the real world.(3)The design should be structured to accommodate change.(4)Traceable-followed concept.9.How should you measure the Quality of design?A good design should be: wellstructured,simple,efficient,flexible,practical,implementable.1.Define development?Which is the process of writing and mainaining the source code.2.Write the difference between high-level and low-level language?pare:Compiler&Interpreter.Compilers:(1)These work by translating the whole program at on need and saving the compiled low level version.(2)This can be slow the use when creating programs as even if an error is found the whole program is translated.(3)One a completed program is translated it can be run over and over again without the need to retranslate.Interpreters:(1)It translates a single line of the program at a time.(2)Each line is then run by the computer as it`s translated.(3)This`s done everytime the program is run.(4)This allows errors to be located quickly when making a program but can be slow when running a finished program.4.Define assembler?Converts the assembly language into machine language.5.Write the common charaderistics of embedded system.It can become very sophisticated in applications like airplanes,missiles,process control systems,and so on.6.What is testing?Testing is the process that choose some suitable test case to execute the program tested with the purpose of finding program errors.7.What do we test by using slw Testing?Application Software,Hardware,SystemSoftware,Procedures,Documentation,Functionality,Performance,Usability8.What are the levels of Testings?Unit Test,Slw Integration Test,System Test,UAT9.Write the difference between Error,Bug&Defect.Error:Mistake made by programmer,Human action that result in the software containing a defect.Bug:Is an error found BEFORE the applicationg goes into production.Defect:Is an error found AFTER the applicationg goes into production.(1)Draw&write abot water-fall model.(*)look like water-fall,so it is called waterfall model.(*)The following phase should not start until the previous prase has finished.(*)Ifcustomers need any changes in any other stage it is not possible to make changes directly in Design.(2)Draw&ExplainIncremental model.(*)Specification,Development&validation are(inter leaved at the same time)(*)It is better than waterfall model for small business &personal systems.Advantages:a.Reducde cost b.Less time c.Easy to malic changes(3)Draw&Explain slw reuse.Slw reuse:is the process of creating slw from Existing slw what can be reused.Advantages:a.Reducing the amount of slw b.reduce risk c.fast delivery(4)Explain different types of application slw.a.Stand-alone application:Run on a local computer-no need to comected to a network.b.Interactive transaction-based application:Remote computer&are accessed by user from their own PCS.c.Embedded controlsystems:By using slw,control&manage the hardware debices.d.Entertainment systems:Personal use-entertain the user.e.Date collection systems:Date management.1.Explain the Generation of PL.1st Generation:(*)Binary 0`s&is(*)Instructions are written as 0`s & 1`s called bits.(*)computer can understand directly.2nd Generation:Assembbly language:ADD A,B.MoveA,10. MoveB,10.storeC.Assembler conberts the assembly language into machine language.3rd Generation:High level language:It convert high-level language into Machine languageExample: C,C++,Java.3GPL:need little bit knowledge of programming.4th Generation:Closer to natual language than a 3GPL.Example: oracle,SQL,Date base language.5th Generation:It is combination of 3rd,4thGPL→Visual(or)Graphical debelopment interface,microsoft,borland,IBM,make SGL products.2.Explain BLACK Box Testing.→The best object is seen as a Black Box→The black box testing techniques are known as functional(or)behavioral testing techniques,because of the observation of the input/output function→Using BlackBox,the inner structure&design of the test object is not consider→The test engineer need not know the internal worring of the BlackBox application→The main focus in BlackBox testing is on fuctionality of the system as a whole→Majority of the application are tested by Black Box Testing.3.Explain WhiteBox Testing→White Box Testing involves looking at the structure of code.→White Box Testing is also called code based testing techniques(or)structural testing techniques.→The generic idea of white box techniques is to execute every part of the code of test object at least one→White Box Testing can be applied at the lower-levels of the testing. Verification and Validation。
软件工程课后习题答案(第八版)

软件工程课后习题:⏹What are the differences between generic software product development and custom software development?⏹Solution:The essential difference is that in generic software product development, the specification is owned by the product developer. For custom product development, the specification is owned by the customer. Of course, there may be differences in development processes but this is not necessarily the case.重要区别为:在通用软件的开发过程中,详细说明(规格说明书)由产品开发者来制定,在定制软件产品开发过程中,详细说明(规格说明书)由客户来制定。
⏹What are the four important attributes which all software products should have? Suggest four other attributes that may sometimes be significant.⏹Solution:For important attributes are maintainability可维护性,dependability 可靠性, performance(efficiency)有效性andusability可用性.Other attributes that may be significant could be reusability可复用性 (can it be reused in other applications),distributability 可分发性(can it be distributed over a networkof processors), portability可移植性 (can it operate onmultiple platforms) and inter-operability互用性 (can it workwith a wide range of other software systems).⏹What is the difference between a software process model and a software process? Suggest two ways in which a software process model might be helpful in identifying possible process improvements.⏹Solution:A software process is what actually goes on when software isdeveloped. A software process model is an abstraction andsimplification of a process. Process models can be used to helpunderstand real processes and to identify which aspects of theseprocesses could be supported by CASE tools. 软件过程就是指在软件开发过程中所做的一些事情。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fusion Engineering and Design75–79(2005)553–557Generic control system design for the CassetteMultifunctional Mover and other ITERremote handling equipmentM.Irving a,b,∗,J.Palmer b,M.Siuko ca ENEA CR Brasimone,40032Camugnano,Bologna,Italyb EFDA-Close Support Unit-Garching,Boltzmannstrasse2,85748Garching,Germanyc Tampere University of Technology,P.O.Box589,33101Tampere,FinlandAvailable online26July2005AbstractA new suite of Remote Handling(RH)equipment,addressing the latest design of the divertor region,is currently being specified for ITER,with procurement of the Cassette Multifunctional Mover(CMM)scheduled for2005–2006.This presents a unique opportunity to address a vital component of the RH system–the control system–and this paper introduces a number of concepts based on replication of design and implementation for functionally similar RH systems.Correctly implemented,this should improve equipment availability and reliability,reduce overall support requirements,and minimise the risks of serious failure.©2005Published by Elsevier B.V.Keywords:ITER;Divertor;Remote Handling;Control systems1.IntroductionIn general,mechanical handling equipment for industry is specified from a principally functional per-spective.These functions concentrate on the mechani-cal aspects of the tasks to be carried out,but although RH equipment may appear to fall into the same cate-∗Corresponding author.Tel.:+498932994141/+390534801419; fax:+498932994224/+390534801225.E-mail addresses:mike.irving@brasimone.enea.it,mike.irving@(M.Irving).gory,there are other important factors which must be considered.Fundamental to this process is recoverabil-ity,since the handling equipment must be deployed in hostile areas where human intervention and repair is not possible,or is at best extremely undesirable.A failure which renders the RH equipment immobile inside the ITER vessel or ducts is considered catastrophic and could compromise the whole project.To minimise the risks of such an occurrence,in-depth studies of various aspects of the RH design are clearly essential,and this paper will focus on one aspect:design and construction of the control systems0920-3796/$–see front matter©2005Published by Elsevier B.V. doi:10.1016/j.fusengdes.2005.06.174554M.Irving et al./Fusion Engineering and Design75–79(2005)553–557and Human–Machine Interfaces(HMI’s)which form the interface between the operator and the remote equipment.2.Two types of RH equipmentFrom a functional and control perspective,ITER RH equipment can be placed into two main categories: Movers(slow,repetitive,large motions,heavy loads, programmed moves)Manipulators(fast,light,responsive,low payloads, versatile,master–slave)With few exceptions,the concepts for ITER RH equipment to date fall quite neatly into these two types. Divertor and blanket handling devices are clearly heavy component‘movers’.Motorised RH tooling,such as pipe cutters and welders,apart from size,is likely to be very similar in control requirements to the mover category.Manipulators,on the other hand,require dexterity and versatility,and are highly complex and specialised mechanisms requiring very tight real-time control. Whilst they can still benefit from some common guide-lines at the specification stage,they are generally less amenable than movers to standardisation.As an example of this,the existing ITER RH Diver-tor equipment prototyped at Brasimone:the Cassette Toroidal Mover(CTM),the Second and Radial Cas-sette Carriers(SCC and RCC),the Tractor Unit(TRC), the Central Cassette Carrier(CCC),and the Auxiliary Duct Vehicle can all be considered‘movers’.However, whilst all are similar in function,and all were able to carry out their specified tasks successfully,Irving [1],the control systems and HMI’s which they employ could not have been more different.3.Problems with this approachEven in this relatively small subset of RH equip-ment,it was found that each system required substantial time,both for operator familiarisation,and for the tech-nical staff to analyse and understand the system well enough to identify and resolve problems efficiently. In practise,it was found that a different member of the team became the local‘expert’on each item of equipment,since a deep technical appreciation of all the equipment was beyond the capabilities of any indi-vidual.Clearly,in an ITER context,such dependency on individuals increases the potential risks of incorrect decision-making should this individual be unavailable during critical periods,such as operational failure or maintenance.Recoverability of failed remote equipment is another primary consideration.In the past,design and manufacture of the controller has generally been the responsibility of the company producing the mechani-cal system,as would likely happen for normal materials handling equipment in industry.The result of this is that,in addition to wide varieties in system architec-ture and HMI’s,built-in facilities for on-line moni-toring of the equipment,and provision for effecting recovery varies enormously from one supplier to the next.Ultimately it is essential to acknowledge that,as well as handling normal operation of the equipment, the control system and its interface form a critical link between the operator and a potentially failed remote device.Clearly this is an area worthy of formal defini-tion,rather than a supplement to a mechanical system specification.4.An alternative approach:a generic architecture for the CMM systemThe fact that the majority of ITER RH equip-ment can be easily categorised indicates that common designs may well be possible,at least for the‘mover’type.One basic design can be utilised for many,pos-sibly all the ITER RH movers:the CMM,the Cassette Toroidal Mover,the transport cask,the transport cask to port docking system and many more.This is the approach suggested for the CMM.As outlined in Palmer[2],the CMM system will comprise of a total of justfive axes:lift,tilt,radial drive, and two end effector movements,see Fig.1.Due to the requirements of high thrust in small volumes,all but the radial drive will employ water–hydraulic actuators.Conventionally,this type of actuator is driven by a servovalve which controls theflow-rate according to a (small)currentflowing in its coil.This current is usu-ally generated by an analogue circuit which itself takes a±10V command,a motion control industry standard.M.Irving et al./Fusion Engineering and Design75–79(2005)553–557555Fig.1.The joints of the CMM.Fig.2.The CMM control system concept.556M.Irving et al./Fusion Engineering and Design75–79(2005)553–557In general,servovalves are very similar in size and per-formance.Electric servomotors develop a torque proportional to the current passing through them,provided by an electronic unit called a servoamplifier,which can be specified to take the same±10V command to pro-duce a commanded velocity.Small servomotors will require small servoamplifiers and vice versa,but the input requirements are usually identical.So despite the CMM actuator types being very diverse,the control requirements are still very similar.Prior to the1990s,the processing heart of the control system usually comprised of a Central Processor Unit (CPU),and a number of memory and analogue/digital input/output cards,with the software written specifi-cally for each application.In addition to being complex, bulky and difficult to program,the designers and pro-grammers had to integrate all the safety and diagnostic provision,requiring a range of experienced personnel throughout the development of the equipment.The modern approach employs a dedicated subsys-tem,known as a Motion Controller(MC),which has become the de facto standard in industry.This inte-grates all the processing,memory and input/output interfaces normally required onto a single board han-dling typically up to eight axes,which can be duplicated for more complex requirements.Less standard appli-cations can readily be accommodated by additional special purpose boards.The system as a whole incorpo-rates all the complex motion control software,includ-ing management of the servo loops at high refresh rates, and comprehensive safety provision,representing sev-eral man–years of dedicated effort.After10–15years, the MC industry is now very mature and active,and since the MC is a versatile device,the programmer has only to select the functionality required for the particu-lar application.This is the direction chosen by JET for its major mover type equipment,and the experiences have been very positive,Haist[3].In this context,the CMM is quite a simple device, and a block diagram of a provisional control system, based on a single MC,appears as Fig.2.5.General characteristics of RH control systemsEssential features of an RH controller mustinclude:Fig.3.JET Boom Controller,showing modularity.•Designed in recoverability:◦good access to all signals and power wires for monitoring and/or override◦use of dc brushed motors for easy basic recovery.M.Irving et al./Fusion Engineering and Design75–79(2005)553–557557◦software allowing supervisors to override inter-locks and access internal information easily •A common architecture for:◦reduced collective knowledge requirement◦lower dependency on individual‘experts’◦improved prospects of recovery of failed equip-ment◦reduced spares provision•The use of MC’s at the heart of the control system design.Desirable features include:•modularity of hardware and software(see Fig.3):◦to enable repairs by simple replacement of com-plete racks◦for upgrading of complete subsystems with low downtime◦to allow component level repairs to be carried out in the workshop•built-in:◦diagnostics for fault identification without test equipment or technical drawings◦provision for continuous monitoring of key parametersThese features have been incorporated into an initial requirements specification and outline design for the CMM control system,Irving[4].6.ConclusionsITER can avoid many of the problems already encountered in RH fusion environments by speci-fying thefinal control system separately from the mechanics.By defining such specifications generically where possible,features specific to RH applications can be collectively addressed,resulting in reduced risks,lowered costs and improved availability.As thefirst of a new suite of ITER RH equipment,the CMM is the ideal opportunity to put this concept into practise.References[1]M.Irving,et al.,Remote operational trials with the ITER FDRdivertor handling equipment,in:Proceedings of the22nd SOFT, Helsinki,September,2002.[2]J.Palmer et al.,Recent developments towards ITER2001Diver-tor Maintenance,This Symposium.[3]B.Haist,et al.,A rational approach to Remote Handling equip-ment control system design,in:Proceedings of the Ameri-can Nuclear Society Robotics and Remote System Conference, Washington,March,2001.[4]M.Irving,Specification and design of the Cassette Multifunc-tional Mover(CMM)control system and HMI for the ITER application,ENEA Report to EFDA MOV-CI-S-001,October 2003.。