最新51单片机驱动步进电机电路及程序1汇总
基于51单片机的步进电机控制
电)四拍(A-B-C-D-A。。。),双(双相绕组通电)四拍(AB-BC- CD-DA-AB-。。。), 八拍(A-AB-B-BC-C-CD-D-DA-A。。。) 3、系统电路图
(1)接电源:VCC(PIN40)、GND(PIN20)。加接退耦电容 0.1uF (2)接晶体:X1(PIN18)、X2(PIN19)。注意标出晶体频率(选用 12MHz), 还有辅助电容 20pF (3)接复位:RES(PIN9)。接上电复位电路,以及手动复位电路,分析 复位工作原理 4、 接配置:EA(PIN31) (1)四个 8 位通用 I/O 端口,对应引脚 P0、P1、P2 和 P3; (2)两个 16 位定时计数器;(TMOD,TCON,TL0,TH0,TL1,TH1) (3)一个串行通信接口;(SCON,SBUF) (4)一个中断控制器;(IE,IP) 根据以上的方案比较与论证确定总体方案,确定硬件原理图。原理图如下:
1.3 步进电机的特点
1.精度高 一般的步进电机的精度为步进角的 3-5%,且不累积。可在宽 广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反 转控制及制动 等,这是步进电动机最突出的优点
2.过载性好——其转速不受负载大小的影响,不像普通电机,当负载加大 时就会出现速度下降的情况,所以步进电机使用在对速度和位置都有严格要求的 场合;
一、步进电机与驱动电路
1.1 什么是步进电机
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱 动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度 (及步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目 的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调 速的目的。
(整理)51单片机控制步进电机入门级教程及程.

AJMPKEY
环境影响的经济损益分析,也称环境影响的经济评价,即估算某一项目、规划或政策所引起的环境影响的经济价值,并将环境影响的经济价值纳入项目、规划或政策的经济费用效益分析中去,以判断这些环境影响对该项目:规划或政策的可行性会产生多大的影响。对负面的环境影响估算出的是环境费用,对正面的环境影响估算出的是环境效益。
RET
TAB1:DB02H,06H,04H,0CH
DB08H,09H,01H,03H;正转模型资料
END
JNBP0.1,NEG
SJMPWAIT
JUST:JBP0.1,NEG;首次按键处理
POS:MOVA,R4;正转9度
MOVCA,@A+DPTR
MOVP1,A
ACALLDELAY
INCR4
AJMPKEY
NEG:MOVR4,#6;反转9度
MOVA,R4
MOVCA,@A+DPTR
MOVP1,A
ACALLDELAY
CJNER4,#255,LOOPF;是结束标志
填报内容包括四个表:MOVR4,#7
1.规划环境影响评价的报审LOOPF:DECR4
51单片机驱动步进电机28BYJ-48

转载51单⽚机驱动步进电机28BYJ-4851单⽚机驱动步进电机 28BYJ-48步进电机 28BYJ-48介绍和驱动及编程28BYJ-48步进电机:步进电机是⼀种将电脉冲转化为⾓位移的执⾏机构。
通俗⼀点讲:当步进驱动器接收到⼀个脉冲信号,它就驱动步进电机按设定的⽅向转动⼀个固定的⾓度(及步进⾓)。
您可以通过控制脉冲个来控制⾓位移量,从⽽达到准确定位的⽬的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从⽽达到调速的⽬的。
步进电机28BYJ48型四相⼋拍电机,电压为DC5V—DC12V 。
当对步进电机施加⼀系列连续不断的控制脉冲时,它可以连续不断地转动。
每⼀个脉冲信号对应步进电机的某⼀相或两相绕组的通电状态改变⼀次,也就对应转⼦转过⼀定的⾓度(⼀个步距⾓)。
当通电状态的改变完成⼀个循环时,转⼦转过⼀个齿距。
四相步进电机可以在不同的通电⽅式下运⾏,常见的通电⽅式有单(单相绕组通电)四拍(A-B-C-D-A 。
),双(双相绕组通电)四拍(AB-BC-CD-DA-AB-。
),⼋拍(A-AB-B-BC-C-CD-D-DA-A 。
)红线接电源5V ,橙⾊电线接P1.3⼝,黄⾊电线接P1.2⼝,粉⾊电线接P1.1⼝,蓝⾊接P1.0⼝。
由于单⽚机接⼝信号不够⼤需要通过ULN2003放⼤再连接到相应的电机接⼝,如下:橙黄 粉蓝⼗六制(P1⼝) 10 0 0 0x08 11 0 0 0x0c 01 0 0 0x04 01 1 0 0x06 00 1 0 0x02 00 1 1 0x03 00 0 1 0x01 10 0 1 0x09顺序刚好相反所以可以定义旋转相序uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //逆时钟旋转相序表uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //正时钟旋转相序表C 语⾔代码:#include<AT89X52.h> #include<intrins.h> #define uchar unsigned char #define uint unsigned int uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //逆时钟旋转相序表 uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //正时钟旋转相序表sbit K1=P3^2; //反转按键 sbit K2=P3^3; //正转按键 sbit K3=P3^4; //停⽌按键 sbit FMQ=P3^6; // 蜂鸣器void delaynms(uint aa){ uchar bb; while(aa--) { for(bb=0;bb<115;bb++) //1ms 基准延时程序 { ; } } }void delay500us(void){ int j; for(j=0;j<57;j++) { ; }}void beep(void){ uchart; for(t=0;t<100;t++) { delay500us(); FMQ=!FMQ; //产⽣脉冲 } FMQ=1; //关闭蜂鸣器}void motor_ccw(void){ uchar i,j; for(j=0;j<8;j++) //电机旋转⼀周,不是外⾯所看到的⼀周,是⾥⾯的传动轮转了⼀周 { if(K3==0) { break; //如果K3按下,退出此循环 } for(i=0;i<8;i++) //旋转45度 { P1=CCW[i]; delaynms(10); //调节转速 } }}void motor_cw(void){ uchar i,j; for(j=0;j<8;j++) { if(K3==0) { break; //如果K3按下,退出此循环 } for(i=0;i<8;i++) //旋转45度 { P1=CW[i]; delaynms(2); //调节转速 } }}void main(void){ uchar r; uchar N=64; //因为步进电机是减速步进电机,减速⽐的1/64 , //所以N=64时,步进电机主轴转⼀圈 while(1) { if(K1==0) { beep(); for(r=0;r<N;r++) { motor_ccw(); //电机逆转 if(K3==0) { beep(); break; } } } elseif(K2==0) { beep(); for(r=0;r<N;r++) { motor_cw(); //电机反转 if(K3==0) { beep(); break; } } } else P1=0xf0; //电机停⽌ }}附:步进电机⼩知识(转)1.什么是步进电机?步进电机是⼀种将电脉冲转化为⾓位移的执⾏机构。
基于51单片机的步进电机控制系统设计

基于51单片机的步进电机控制系统设计步进电机是一种特殊的直流电动机,具有定角度、定位置、高精度等特点,在许多领域得到广泛应用,如机械装置、仪器设备、医疗设备等。
本文将基于51单片机设计一个步进电机控制系统,主要包括硬件设计和软件设计两部分。
一、硬件设计步进电机控制系统的硬件设计主要包括51单片机、外部电源、步进电机驱动模块、以及其他辅助电路。
1.51单片机选择由于步进电机控制需要执行复杂的算法和时序控制,所以需要一个性能较高的单片机。
本设计选择51单片机作为主控芯片,因为51单片机具有丰富的外设接口、强大的计算能力和丰富的资源。
2.外部电源步进电机需要较高的电流供给,因此外部电源选择稳定的直流电源,能够提供足够的电流供电。
电源电压和电流的大小需要根据具体的步进电机来确定。
3.步进电机驱动模块步进电机驱动模块是连接步进电机和51单片机的关键部分,它负责将51单片机输出的脉冲信号转化为对步进电机的驱动信号,控制步进电机准确转动。
常用的步进电机驱动芯片有L297、ULN2003等。
4.其他辅助电路为了保证步进电机控制系统的稳定运行,还需要一些辅助电路,如限流电路、电源滤波电路、保护电路等。
这些电路的设计需要根据具体的应用来确定。
二、软件设计1.系统初始化系统初始化主要包括对51单片机进行外部中断、定时器、串口和IO 口等初始化设置。
根据实际需求还可以进行其他模块的初始化设置。
2.步进电机驱动程序步进电机的驱动程序主要通过脉冲信号来控制电机的转动。
脉冲信号的频率和脉冲宽度决定了电机的转速和运行方向。
脉冲信号可以通过定时器产生,也可以通过外部中断产生。
3.运动控制算法步进电机的运动控制可以采用开环控制或闭环控制。
开环控制简单,但无法保证运动的准确性和稳定性;闭环控制通过对电机转动的反馈信号进行处理来调整脉冲信号的生成,从而实现精确的运动控制。
4.其他功能设计根据具体的应用需求,可以加入其他功能设计,如速度控制、位置控制、加速度控制等。
步进电机控制程序(c语言51单片机)
// pri_dj = Pme );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one _round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; }
while ( key_puse & key_clear ); delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); }
if ( !key_puse ) break; }
while( !key_puse ); delay(8ms);
while( !key_puse ); }
set_display_num(); for(i = 0; i < LEDLen ; i ++){
P0 = 0xf0; P0 = P0 | LEDBuf[i] ; if(i==0) led_1000 = 0; //P0^4 if(i==1) led_100 = 0; //P0^5 if(i==2) led_10 = 0; //P0^6 if(i==3) led_1 = 0; //P0^7
delay ( 1ms ); tmp = (~(P2 | 0xF0)); P2 = 0x7F; // 0111 1111
delay ( 1ms ); tmp = (~(P2 | 0xF0)) * 10 + tmp; set_round_num = set_round_num + tmp * 100; set_round_num = set_round_num * Chilun_Num;
51单片机驱动步进电机电路及程序
相绕组通断,P1.1控制B相,P1.2
控制C相。
2021/8/5
13
以A相控制为例:
当 P1 . 0 输 出 为 1 , 发 光管不发光,因此光敏二极 管截止,使担负驱动任务的 达林顿管导通。A相绕组通电。
相反,当P1.0=0→发 光管发光→光敏管导通→达 林顿管截止→A相绕组不通 电。
2021/8/5
2021/8/511 NhomakorabeaSUB: SETB P3.0
SETB P3.0 ;保证输出高电平的时间>5μs
SETB P3.0
CLR P3.0
;变为低电平
MOV R7,30H
LOOP: NOP
;软件延时程序:
NOP
;基本延时(10μs×时间常数)
NOP
DJNZ R7,LOOP
RET
※时间常数事先可装入30H单元,改变30H单元的内容就可改
所以按照 A→AB→B→BC→C→CA→A
的顺序控制,电机将按顺时针方向旋转, 每步转动1.5°,即步距角=1.5°,
由于要经过6步才走完一个齿距 (6×1.5°=9°),所以叫三相六拍。
2021/8/5
7
如果要使步进电机反转,只要按
A→AC→C→CB→B→BA
顺序通电就行了。
结论:从上面两种运行方式可看出,错齿是促使步
进电机旋转的根本原因,当某相通电,相应的齿对
齐,迫使电机旋转一个步距角,未通电的各相的齿
出现了新的错位。改变通电的顺序和通电的相数,
可组合出其它的运行方式。
讨论:三项三拍和三项六拍运行方式,哪种定位
2021更/8/5精确?
8
三、步进电机有如下特点:
❖ 给步进脉冲电机就转,不给步进脉冲电机就不转; ❖ 步进脉冲频率高,步进电机转得快;步进脉冲频率
51单片机驱动步进电机__终极完整版
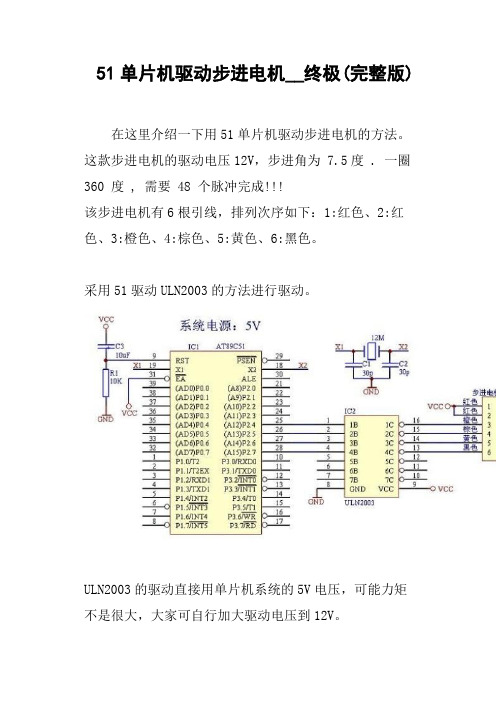
51单片机驱动步进电机__终极(完整版)在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;************************************************ ******************************;************************* 步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;----------------------------正转-------------------------- ORG 0000H LJMP MAIN ORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲 START: MOVR0,#00H START1: MOV P2,#00H MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 START MOV P2,ALCALL DELAY INC R0DJNZ R3,START1MOV P2,#00H LCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲 START2:MOV P2,#00H MOV R0,#05 START3: MOV A,R0MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0DJNZ R3,START3 MOV P2,#00HLCALL DELAY1 LJMP MAINDELAY: MOV R7,#40 步进电机的转速 M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:DB 30H,60H,0C0H,90H 正转表 DB 00 正转结束DB 30H,90H,0C0H,60H 反转表 DB 00 反转结束 END 51单片机控制四相步进电机拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为 360/(4×5)=18度。
51单片机驱动步进电机的方法
51单片机驱动步进电机的方法一、步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构,广泛应用于各种自动化设备中。
其工作原理是,当一个脉冲信号输入时,电机转动一个步距角,从而实现电机的精确控制。
二、51单片机驱动步进电机的方法1、硬件连接需要将51单片机与步进电机连接起来。
通常,步进电机需要四个引脚,分别连接到单片机的四个GPIO引脚上。
同时,还需要连接一个驱动器来提高电机的驱动能力。
2、驱动程序编写接下来,需要编写驱动程序来控制步进电机的转动。
在51单片机中,可以使用定时器或延时函数来产生脉冲信号,然后通过GPIO引脚输出给电机。
同时,还需要设置电机的步距角和转向,以保证电机的精确控制。
3、示例程序以下是一个简单的示例程序,用于演示如何使用51单片机驱动步进电机:cinclude <reg52.h> //包含51单片机的头文件sbit motorPin1=P1^0; //定义连接到P1.0引脚的电机引脚sbit motorPin2=P1^1; //定义连接到P1.1引脚的电机引脚sbit motorPin3=P1^2; //定义连接到P1.2引脚的电机引脚sbit motorPin4=P1^3; //定义连接到P1.3引脚的电机引脚void delay(unsigned int time) //延时函数unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);void forward(unsigned int step) //正转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin1=1;motorPin3=1;motorPin2=0;motorPin4=0; //设置转向和步距角delay(step); //延时一段时间void backward(unsigned int step) //反转函数motorPin1=0;motorPin2=0;motorPin3=0;motorPin4=0; //清零电机引脚delay(step); //延时一段时间motorPin2=1;motorPin4=1;motorPin3=0;motorPin1=0; //设置转向和步距角delay(step); //延时一段时间void main() //主函数unsigned int step=1000; //设置步距角为1000微步forward(step); //正转一圈backward(step); //反转一圈while(1); //循环等待,保持电机转动状态在这个示例程序中,我们使用了四个GPIO引脚来控制步进电机的转动。
51单片机步进电机程序教学内容

#include <REG52.H>#define uchar unsigned char#define uint unsigned int#define ulong unsigned long#define CLK_WISE 0//顺时针方向转动#define INVERSE 1//逆时针方向转动bit direction=CLK_WISE;/***方向标志,取值为CLK_WISE 或INVERSE*/static uchar speedcount=0;//加速标志,越大转速越快,最大到7,然后回归到0,循环。
//程序中可以依据它来改变占空比uchar step[8]={0x01,0x09,0x08,0x0c,0x04,0x06,0x02,0x03};//8个步uchar th_0[8]={0x5D,0x85,0x9E,0xAE,0xBA,0xC2,0xC9,0xCF};//8个定时器值,高8位uchar tl_0[8]={0x3D,0xEE,0x58,0x9E,0x3E,0xF7,0xBF,0x2C};//8个定时器值,低8位int step_i=0;//当前处于哪一步/***定时器t0***/void time0(void) interrupt 1 using 1{P2=step[step_i];//输出电机控制信号if(direction==CLK_WISE) //顺时针转step_i++;elsestep_i--;//逆时针转if (step_i>7)//顺时针到最后一步,需要调整到第一步step_i=0;if (step_i<0)//顺时针到第一步,需要调整到最后一步step_i=7;TH0=th_0[speedcount];//根据当前速度设定定时器初值TL0=tl_0[speedcount];}/****改变转向标志*****/void int1_srv (void) interrupt 2 using 2{if(INT1==0){while(!INT1);direction=!direction;}}/*******加速********/void change(void) interrupt 0 using 0{if(INT0==0){while(!INT0);speedcount++;//记录加速次数if(speedcount>7)speedcount=0;//最大为7,然后从0开始循环。
51单片机控制的步进电机C语言程序

51单片机控制的步进电机C语言程序用的是L298驱动的和ULN2003一样,你把它换成2003就行拉#include <AT89X51.H>unsigned char codetable[]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9,0x00,0xf1,0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0x f3,0x00};unsigned char temp,temp_old;unsigned char key;unsigned char i,j,k,m,s;void delay(int i){for(m=i;m>0;m--)for(j=250;j>0;j--)for(k=10;k>0;k--);}void saomiao(){P3=0xff;P3_4=0;temp=P3;temp=temp&0x0f;if(temp!=0x0f){for(i=50;i>0;i--)for(j=200;j>0;j--);temp=P3;temp=temp&0x0f;if(temp!=0x0f){temp=P3;temp=temp&0x0f;switch(temp){case 0x0e:key=1;break;case 0x0d:key=2;break;case 0x0b:key=3;break;case 0x07:key=4;break;}temp=P3;temp=temp&0x0f;while(temp!=0x0f){temp=P3;temp=temp&0x0f;}}}P3=0xff;P3_5=0;temp=P3;temp=temp&0x0f;if(temp!=0x0f){for(i=50;i>0;i--)for(j=200;j>0;j--);temp=P3;temp=temp&0x0f;if(temp!=0x0f){temp=P3;temp=temp&0x0f;switch(temp){case 0x0d:key=5;break;case 0x0b:key=6;break;case 0x07:key=7;break;}temp=P3;temp=temp&0x0f;while(temp!=0x0f){temp=P3;temp=temp&0x0f;}}}}void main(void){while(1){saomiao();if(key==1){ P1=0;P2=0;saomiao();}if(key==2){temp_old=key;for(s=0;s<8;s++){ P2=table[s];P1_4=0;delay(13);saomiao();if(key!=temp_old){P1_4=1;break;}}}if(key==3){temp_old=key;for(s=0;s<8;s++){ P2=table[s];P1_5=0;delay(5);saomiao();if(key!=temp_old){P1_5=1;break;}}}if(key==4){temp_old=key; for(s=0;s<8;s++){ P2=table[s];P1_6=0;delay(20);saomiao();if(key!=temp_old){P1_6=1;break;}}}if(key==5){temp_old=key;for(s=9;s<17;s++){ P2=table[s];P1_7=0;delay(13);saomiao();if(key!=temp_old){P1_7=1;break;}}}if(key==6){temp_old=key;for(s=9;s<17;s++){ P2=table[s];P1_5=0;delay(5);saomiao();if(key!=temp_old){P1_5=1;break;}}}if(key==7){temp_old=key;for(s=9;s<17;s++){ P2=table[s];P1_6=0;delay(20);saomiao();if(key!=temp_old){P1_6=1;break;}}}}}C语言程序源代码#include <REGX51.H> // 51寄存器定义#include "intrins.h"#define control P1 //P1_0:A相,P1_1:B相,P1_2:C相,P1_3:D相#define discode P0 //显示代码控制端口#define uchar unsigned char //定义无符号型变量#define uint unsigned intsbit en_dm=P3^0; //显示代码锁存控制sbit en_wk=P3^1; //位控锁存控制uchar code corotation[4]= {0x03,0x06,0x0c,0x09};//电机正转uchar code rollback[4]={0x0c,0x06,0x03,0x09}; //电机反转uchar code tab[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};//显示字段uint code Levspeed[5]={500,400,300,200,100};//电机速度等级uchar Hscan,speedcount;//Hscan行扫描,speedcount 速度等级计数uint uu; //频率计数uint step,setstep; //step:电机步伐计数,setstep:手动设置电机步伐uint speed=500; //电机初始速度uchar count;uchar flag[5];uchar butcount; //按键次数//****************************************//flag[0] 正转标志//flag[1] 反转标志//flag[2] 加速标志//flag[3] 减速标志//flag[4] 设置标志//****************************************Delay1mS(unsigned int tt) //延时1ms “Delay1mS”延时子程序,用循环语句延时。
基于51单片机控制步进电机

单片机原理及系统课程设计1 引言步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。
单片机控制的步进电机广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,大型望远镜,卫星天线定位系统等等。
随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。
步进电机的原始模型起源于1830年至1860年,1870年前后开始以控制为目的的尝试,应用于氩弧灯的电极输送机构中,这被认为最早的步进电机。
1950年后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。
到20世纪60年代后期,在步进电机本体方面随着永磁材料的发展,各种实用性步进电机应运而生。
步进电机往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中。
在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。
2 设计方案与原理4.1 设计方案设计一个51单片机四相步进电机控制系统要求系统具有如下功能:(1)由I/O口产生的时序方波作为电机控制信号;(2)信号经过驱动芯片驱动电机的运转;(3)电机的状态通过键盘控制,包括正转,反转,加速,减速,停止和单步运行。
4.2 设计原理步进电机实际上是一个数字\角度转换器,也是一个串行的数\模转换器。
步进电机的基本控制包括启停控制、转向控制、速度控制、换向控制4个方面。
从结构上看,步进电机分为三相、四相、五相等类型,本次设计的是四相电机。
四相步进电机的工作方式有单四拍、双四拍和单双八拍三种。
在本次设计中,我们使用的是四相单八拍的工作方式。
通过P1口给A,B,C,D四相依次输出高电平即可实现步进电机的旋转,通过控制两次输出的间隔,即可实现对步进电机的速度控制。
51单片机控制步进电机硬件图及C语言编程
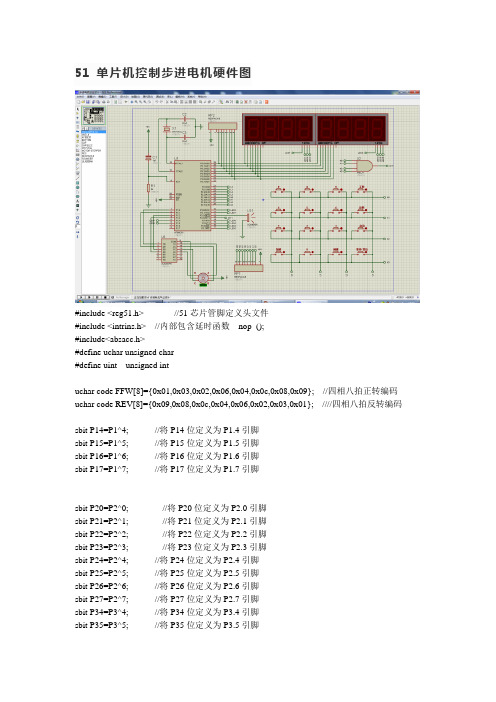
51单片机控制步进电机硬件图#include <reg51.h> //51芯片管脚定义头文件#include <intrins.h> //内部包含延时函数_nop_();#include<absacc.h>#define uchar unsigned char#define uint unsigned intuchar code FFW[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09}; //四相八拍正转编码uchar code REV[8]={0x09,0x08,0x0c,0x04,0x06,0x02,0x03,0x01}; ////四相八拍反转编码sbit P14=P1^4; //将P14位定义为P1.4引脚sbit P15=P1^5; //将P15位定义为P1.5引脚sbit P16=P1^6; //将P16位定义为P1.6引脚sbit P17=P1^7; //将P17位定义为P1.7引脚sbit P20=P2^0; //将P20位定义为P2.0引脚sbit P21=P2^1; //将P21位定义为P2.1引脚sbit P22=P2^2; //将P22位定义为P2.2引脚sbit P23=P2^3; //将P23位定义为P2.3引脚sbit P24=P2^4; //将P24位定义为P2.4引脚sbit P25=P2^5; //将P25位定义为P2.5引脚sbit P26=P2^6; //将P26位定义为P2.6引脚sbit P27=P2^7; //将P27位定义为P2.7引脚sbit P34=P3^4; //将P34位定义为P3.4引脚sbit P35=P3^5; //将P35位定义为P3.5引脚sbit P36=P3^6; //将P36位定义为P3.6引脚sbit P37=P3^7; //将P37位定义为P3.7引脚sbit P30=P3^0; //将P30位定义为P3.0引脚sbit P31=P3^1; //将P31位定义为P3.1引脚sbit BEEP=P3^2; // 蜂鸣器bit on=0;bit off=1; //运行与停止标志bit zdirection=0; //方向标志bit fdirection=0; //方向标志uchar h,l,k; //定义行键值//定义列键值uchar idata count[3]; //0-9数值储存unsigned char code Tab[ ]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //数字0~9的段码uchar keyval=0; //定义变量储存按键值uchar dat=0; //按键值uint run_i=0;uchar count_i=0;uint run=0; //需要运行的步数uint drun=0; //当前运行的步数bit flag;uint x=60;uint y=60;uint z=0;/* uint k=0; //调速按键次*//**************************************************************/ void led_delay1(void){unsigned char j;for(j=0;j<52;j++);}void beep(){uchar j;for (j=0;j<200;j++){led_delay1();BEEP=!BEEP; //BEEP取反}BEEP=1; //关闭蜂鸣器}/**************************************************************函数功能:数码管动态扫描延时**************************************************************/void led_delay(void){unsigned char j;for(j=0;j<200;j++);}/**************************************************************/**************************************************************函数功能:软件延时去抖动子程序**************************************************************/void delay20ms(void){unsigned char i,j;for(i=0;i<70;i++)for(j=0;j<60;j++);}void display(uint run){ //显示设点步数P31=1; //点亮数码管DS6P30=0;P34=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((run/100)!=0){ P0=Tab[run/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P30=1;P31=0;P34=0;P36=0;P37=0;P14=0;P15=0;if(((run%100/10)==0)&&(run/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();} //点亮数码管DS5else{ P0=Tab[run%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P37=1; //点亮数码管DS4P30=0;P34=0;P35=0;P36=0;P31=0;P14=0;P15=0;if((run/10==0)&&(run%100/10==0)&&(run%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[run%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}/*********************************************************************/void ddisplay(uint drun){ //显示运行步数P36=1; //点亮数码管DS3P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if((drun/100)!=0){P0=Tab[drun/100]; //显示百位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P35=1; //点亮数码管DS2P30=0;P34=0;P31=0;P36=0;P37=0;P14=0;P15=0;if(((drun%100/10)==0)&&(drun/10==0)) { P0=0xff;led_delay(); //动态扫描延时led_delay();}//点亮数码管DS5else{ P0=Tab[drun%100/10]; //显示十位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;P34=1; //点亮数码管DS1P30=0;P31=0;P35=0;P36=0;P37=0;P14=0;P15=0;if((drun/10==0)&&(drun%100/10==0)&&(drun%10==0)){ P0=0xff;led_delay(); //动态扫描延时led_delay(); //动态扫描延时}else{ P0=Tab[drun%10]; //显示个位led_delay(); //动态扫描延时led_delay(); //动态扫描延时}P0=0xff;}void dddisplay(){ P15=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P14=0;if((fdirection==1)&&(on==1)){P0=0xbf; led_delay(); led_delay(); }P0=0xff;P14=1;P36=0;P30=0;P34=0;P35=0;P31=0;P37=0;P15=0;if(y==60){P0=0x08;led_delay(); led_delay();}if(y==50){P0=0x03; led_delay(); led_delay(); }if(y==40){P0=0x46; led_delay(); led_delay();}if(y==30){P0=0x21 ;led_delay(); led_delay();}if(y==20){P0=0x86; led_delay(); led_delay(); }if(y==10){P0=0x8e; led_delay(); led_delay();}P0=0xff;}/************************************************************** 函数功能:主函数**************************************************************/ void main(void){ x=60;P14=0;P15=0;P16=0;P17=0;EA=1;EX1=1; //允许使用外中断IT1=1; //选择负跳变来触发外中断PT0=1;ET0=1; //定时器T0中断允许TMOD=0x01; //使用定时器T0的模式1TH0=0xec; //定时器T0的高8位赋初值TL0=0x78; //定时器T0的低8位赋初值TR0=1;P30=1; //启动定时器T0P34=1;P35=1;P36=1;P37=1;P31=1;P2=0xf0;while(1){if(flag){P2=0x0f; h=P2&0x0f; //所有行线置为高电平"1",所有列线置为低电平"0",并把值给hif((P2&0x0f)!=0x0f) //行线中有一位为低电平"0",说明有键按下delay20ms(); //延时一段时间、软件消抖else {keyval=16;}if(h!=0x0f) //确实有键按下{h=P2&0x0f; //读取行值P2=0xf0; //反转电位l=P2&0xf0; //读取列值k=h+l; //行列相加,为键位值if(k==0x7e) keyval=12;if(k==0x7d) keyval=0;if(k==0x7b) keyval=13;if(k==0x77) keyval=15;if(k==0xbe) keyval=1;if(k==0xbd) keyval=2;if(k==0xbb) keyval=3;if(k==0xb7) keyval=14; //键位与设定对应if(k==0xde) keyval=4;if(k==0xdd) keyval=5;if(k==0xdb) keyval=6;if(k==0xd7) keyval=11;if(k==0xee) keyval=7;if(k==0xed) keyval=8;if(k==0xeb) keyval=9;if(k==0xe7) keyval=10;}else keyval=16;dat=keyval;if((dat==10)&&(run!=0)) //正转键按下{zdirection=1; //方向标志fdirection=0;on=1; //运行与停止标志off=0;}if((dat==11)&&(run!=0)) //反转键按下{fdirection=1; //方向标志zdirection=0;on=1; //运行与停止标志off=0;}if(dat==12) //加速键{if(y==10) y=10;else y=y-10;}if(dat==13) //减速键{if(y==60) y=y;else y=y+10;}if((dat==14)&&(run!=0)) //开始键按下{ if(z==1) {on=1;}elseon=1;off=0;z=0;if((zdirection==0)&&(fdirection==0)){zdirection=1;}}if(dat==15) { z++;on=0; } //停止键按下一次if((on==0)&&(z==2)) //停止键按下二次{count[0]=0; //显示清零count[1]=0;count[2]=0;drun=0; run=0;z=0;on=0;off=1; //运行与停止标志}if((dat>=0)&&(dat<=9)&&(on==0)&&(off==1)){count[count_i]=dat;if(count[0]!=0){count_i++;}if((count_i==3)&&(on==0)&(off==1)){count_i=0;}if((count_i==0)&&(on==0)&(off==1)){ if(count[0]==0)run=0;else run=count[0]*100+count[1]*10+count[2];}if((count_i==1)&&(on==0)&(off==1)){run=count[0];}if((count_i==2)&&(on==0)&(off==1)){run=count[0]*10+count[1];}}if((dat==0)&&(on==1)){off=1;}if(dat==16);flag=0;}/*if(run!=0){*/ddisplay(drun);dddisplay();display(run);/*} */ //调用按键值的数码管显示子程序if((run==drun)&&run!=0){on=0;off=1;beep();drun=0; run=0;count[0]=0; //显示清零count[1]=0;count[2]=0;count_i=0;}}}/**************************************************************外部中断键盘扫描键值保存在dat中******************************************************************************* ************/void Interrupt1() interrupt 2 using 3{flag=1;}/*************************************************************************/ void Interrupt2() interrupt 1 using 1{ TR0=0;EX1=1;TH0=0xec;TL0=0x78;x--;if(x==0){if((zdirection==1)&&(fdirection==0)&&(on==1)&&(off==0)){P1=FFW[run_i];fdirection=0;led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((zdirection==0)&&(fdirection==1)&&(on==1)&&(off==0)){P1=REV[run_i];led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时led_delay(); //动态扫描延时zdirection=0;drun++;run_i++;if(run_i==8)run_i=0;if(run==drun){on=0;off=1;}}if((on==0)&&(off=1))P1=0x00; x=y;}TR0=1;}。
51单片机驱动步进电机的办法

51单片机驱动步进电机的办法51单片机驱动步进电机的办法:
驱动电压12V,步进角为7.5度.一圈360度,需求48个脉冲完毕!
该步进电机有6根引线,摆放次第如下:1:赤色、2:赤色、3:橙色、4:棕色、5:黄色、6:黑色。
选用51驱动ULN2003的办法进行驱动。
ULN2003的驱动直接用单片机体系的5V电压,可才调矩不是很大,咱们可自行加大驱动电压到12V。
步进电机是将电脉冲信号改动为角位移或线位移的开环操控元件。
在非超载的状况下,电机的转速、接连的方位只取决于脉冲信号的频率和脉冲数,而不受负载改动的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性联络的存在,加上步进电机只需周期性的差错而无累积差错等特征。
使得在速度、方位等操控范畴用步进电机来操控变的十分的简略。
尽管步进电机已被广泛地运用,但步进电机并不能象通常的直流电机,沟通电机在惯例下运用。
它有必要由双环形脉冲信号、功率驱动电路等构成操控体系方可运用。
因而用好步进电机却非易事,它触及到机械、电机、电子及核算机等很多专业常识。
如今,出产步进电机的厂家确实
不少,但具有专业技能人员,可以自行开发,研发的厂家却十分少,大大都的厂家只一、二十人,连最根柢的设备都没有。
仅仅处于一种盲意图拷贝时期。
这就给户在商品选型、运用中构成很多费事。
(整理)51单片机驱动步进电机电路及程序1.

在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、 5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************** *************;**************************** 步进电机的驱动***************************************; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;---------------------------- 正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------MOV R3,#144 反转一圈共 144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END。
51单片机控制步进电机程序及硬件电路图

51单片机控制步进电机程序及硬件电路图(总4页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--#include <>static unsigned int count; //计数static int step_index; //步进索引数,值为0-7static bit turn; //步进电机转动方向static bit stop_flag; //步进电机停止标志static int speedlevel; //步进电机转速参数,数值越大速度越慢,最小值为1,速度最快static int spcount; //步进电机转速参数计数void delay(unsigned int endcount); //延时函数,延时为endcount*毫秒void gorun(); //步进电机控制步进函数void main(void){count = 0;step_index = 0;spcount = 0;stop_flag = 0;P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;EA = 1; //允许CPU中断TMOD = 0x11; //设定时器0和1为16位模式1 ET0 = 1; //定时器0中断允许TH0 = 0xFE;TL0 = 0x0C; //设定时每隔中断一次TR0 = 1; //开始计数turn = 0;speedlevel = 2;delay(10000);speedlevel = 1;do{speedlevel = 2;delay(10000);speedlevel = 1;delay(10000);stop_flag=1;delay(10000);stop_flag=0;}while(1);}//定时器0中断处理void timeint(void) interrupt 1{TH0=0xFE;TL0=0x0C; //设定时每隔中断一次 count++;spcount--;if(spcount<=0){spcount = speedlevel;gorun();}}void delay(unsigned int endcount) {count=0;do{}while(count<endcount); }void gorun(){ if (stop_flag==1){P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 0;return;}switch(step_index){case 0: //0P1_0 = 1;P1_1 = 0;P1_2 = 0;P1_3 = 0;break;case 1: //0、1P1_0 = 1;P1_1 = 1;P1_2 = 0;P1_3 = 0;break;case 2: //1P1_0 = 0;P1_1 = 1;P1_2 = 0;P1_3 = 0;break;case 3: //1、2 P1_0 = 0;P1_1 = 1;P1_2 = 1;P1_3 = 0;break;case 4: //2P1_0 = 0;P1_1 = 0;P1_2 = 1;P1_3 = 0;break;case 5: //2、3 P1_0 = 0;P1_1 = 0;P1_2 = 1;P1_3 = 1;break;case 6: //3P1_0 = 0;P1_1 = 0;P1_2 = 0;P1_3 = 1;break;case 7: //3、0 P1_0 = 1;P1_1 = 0;P1_2 = 0;P1_3 = 1;}if (turn==0){step_index++;if (step_index>7) step_index=0; }else{step_index--;if (step_index<0) step_index=7; }}。
51单片机步进电机+数码管显示程序
#include<reg52.h>#include<intrins.h>#define uint unsigned int#define uchar unsigned charuinti,j;uchartemp,aa,bai,shi,ge,te;sbitduan=P2^0;sbitwei=P2^1;uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //顺时钟旋转相序表uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};void display(ucharbai,ucharshi,ucharge);void delay(uint z);voidinit();void main(){init();//初始化子程序while(1){for(te=0;te<4;te++){while(temp>0){if(aa==20){temp--;aa=0;bai=3-te;shi=temp%100/10;ge=temp%10;}display(bai,shi,ge);}if(temp==0)temp=60;}for(j=0;j<32;j++)for(i=0;i<8;i++){P0=CCW[i];delay(10);}delay(400);for(j=0;j<32;j++)for(i=0;i<8;i++){P0=CW[i];delay(10);}P0=0x00;}}void delay(uint z){uintx,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}void display(ucharbai,ucharshi,ucharge) {duan=1;P1=table[bai];duan=0;P1=0x00;wei=1;P1=0x10 ;wei=0;delay(1);duan=1;P1=0xbf;duan=0;P1=0x00;wei=1;P1=0x20;wei=0;delay(1);duan=1;P1=table[shi];duan=0;P1=0x00;wei=1;P1=0x40;wei=0;delay(1);duan=1;P1=table[ge];duan=0;P1=0x00;wei=1;P1=0x80;wei=0;delay(1);}voidinit(){wei=0;duan=0;P0=0x00;temp=60;TMOD=0x01;TH0=(65536-50000)/256;TL0=(65536-50000)%256;EA=1;ET0=1;TR0=1;}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;aa++;}、、、、、、、、、、、、、、、、、、、、、、#include<reg52.h>#include<intrins.h>#define uint unsigned int#define uchar unsigned charuinti,j;uchartemp,aa,bai,shi,ge,te;sbitduan=P2^0;sbitwei=P2^1;uchar code CCW[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //顺时钟旋转相序表uchar code CW[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};//uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//void display(ucharbai,ucharshi,ucharge);void delay(uint z);voidinit();void main(){init();//初始化子程序while(1){for(j=0;j<200;j++)for(i=0;i<8;i++){P0=CCW[i];delay(20);}delay(400);for(j=0;j<200;j++)for(i=0;i<8;i++){P0=CW[i];delay(20);}P0=0x00;}}void delay(uint z){uintx,y;for(x=z;x>0;x--)for(y=110;y>0;y--); }voidinit(){wei=0;duan=0;P0=0x00;temp=60;TMOD=0x01;TH0=(65536-50000)/256;TL0=(65536-50000)%256;EA=1;ET0=1;TR0=1;}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;aa++;}。
[整理]51单片机驱动步进电机电路及程序(1)
![[整理]51单片机驱动步进电机电路及程序(1)](https://img.taocdn.com/s3/m/6aaae6432af90242a995e516.png)
在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、 5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************** *************;**************************** 步进电机的驱动***************************************; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!! ; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!;---------------------------------------------------------------------------------; A组线圈对应 P2.4; B组线圈对应 P2.5; C组线圈对应 P2.6; D组线圈对应 P2.7; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度);----------------------------------------------------------------------------------;---------------------------- 正转--------------------------ORG 0000HLJMP MAINORG 0100HMAIN:MOV R3,#144 正转 3 圈共 144 脉冲START:MOV R0,#00HSTART1:MOV P2,#00HMOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START 对 A 的判断,当 A = 0 时则转到 STARTMOV P2,ALCALL DELAYINC R0DJNZ R3,START1MOV P2,#00HLCALL DELAY1;-----------------------------反转------------------------ MOV R3,#144 反转一圈共 144 个脉冲START2:MOV P2,#00HMOV R0,#05START3:MOV A,R0MOV DPTR,#TABLEMOVC A,@A+DPTRJZ START2MOV P2,ACALL DELAYINC R0DJNZ R3,START3MOV P2,#00HLCALL DELAY1LJMP MAINDELAY: MOV R7,#40 步进电机的转速M3: MOV R6,#248DJNZ R6,$DJNZ R7,M3RETDELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200DEL3: MOV R2,#250DJNZ R2,$DJNZ R3,DEL3DJNZ R4,DEL2RETTABLE:DB 30H,60H,0C0H,90H 正转表DB 00 正转结束DB 30H,90H,0C0H,60H 反转表DB 00 反转结束END。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机驱动步进电机电路及程序1
在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!
该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;********************************************************************
*************
;**************************** 步进电机的驱动
***************************************
; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19
;--------------------------------------------------------------------
-------------
; 步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!
; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!
;---------------------------------------------------------------------------------
; A组线圈对应 P2.4
; B组线圈对应 P2.5
; C组线圈对应 P2.6
; D组线圈对应 P2.7
; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度)
;--------------------------------------------------------------------
--------------
;---------------------------- 正转--------------------------
ORG 0000H
LJMP MAIN
ORG 0100H
MAIN:
MOV R3,#144 正转 3 圈共 144 脉冲
START:
MOV R0,#00H
START1:
MOV P2,#00H
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ START 对 A 的判断,当 A = 0 时则转到 START
MOV P2,A
LCALL DELAY
INC R0
DJNZ R3,START1
MOV P2,#00H
LCALL DELAY1
;-----------------------------反转------------------------ MOV R3,#144 反转一圈共 144 个脉冲
START2:
MOV P2,#00H
MOV R0,#05
START3:
MOV A,R0
MOV DPTR,#TABLE
MOVC A,@A+DPTR
JZ START2
MOV P2,A
CALL DELAY
INC R0
DJNZ R3,START3
MOV P2,#00H
LCALL DELAY1
LJMP MAIN
DELAY: MOV R7,#40 步进电机的转速
M3: MOV R6,#248
DJNZ R6,$
DJNZ R7,M3
RET
DELAY1: MOV R4,#20 2S 延时子程序DEL2: MOV R3,#200
DEL3: MOV R2,#250
DJNZ R2,$
DJNZ R3,DEL3
DJNZ R4,DEL2
RET
TABLE:
DB 30H,60H,0C0H,90H 正转表
DB 00 正转结束
DB 30H,90H,0C0H,60H 反转表
DB 00 反转结束
END。