采集排列参数
标准16排CT参数

成像图像层数
≥32层图像/360度
7.2*
最薄探测器物理厚度
≤0.7mm
7.3*
扫描视野
≥50cm
7.5
定位像方向
后前、前后、左右侧位
7.7
定位扫描长度
≥100cm
7.8
最长连续螺旋扫描时间
≥300秒
7.9
最大连续扫描范围
≥100cm
7.10
螺距连续可调
具备
7.11
最大螺距
≥1.5
7.12
提供根据生理解剖角度的自由重建
随标书提供CFDA认证材料
三
主要参数
1
投标商应在投标文件中如实提供其技术指标,并说明其测试条件和测试方法,可增加说明
2
机架系统
2.1
机架孔径
≥70cm
2.2
原厂内置一体化摄像头
机架上具备内置一体化摄像头,扫描全程监控患者有否移动、对造影剂有无过敏反应等情况。监控图像可在主机显示。
2.3
三维激光定位系统
序号
内容
招标要求
一
招标要求
高档多排螺旋CT系统,全身扫描的临床应用和临床研究
二
设备投标条件合法销售有关文件
1.1
投标条件
投标商应在满足标书技术指标要求前提下,提供2015年以后的新机型。
1.2
通过有关国际认证
随标书提供FDA认证材料
1.3
球管、探测器、高压发生器与ct主机为同一品牌
1.4
通过中国有关医疗器械注册证
探测器采集最薄层厚
≤0.7mm
4.7
滑环类型
低压滑环
4.8
机架驱动方式
皮带驱动
天然源面波数据采集
2013年4月 杭州
排列选择-嵌套的三角形
在圆心放置一个检波器,其余检
波器均匀分布在多个圆周上,每个圆
10
7
8 上三个检波器,形成嵌套的三角形排
列(同心圆形排列)。
2
3
1
6
10
7
8
2 13
6
4
5
92013年4月 杭州 Nhomakorabea注意事项
由于天然源面波的震源位置未知,数据处理时假设波动的主要能量 是面波,且以平面波的形式经过排列,所以在采集数据时,避免人员在 排列附近,尤其在排列内部(如三角形内)随意走动,也要尽量避开排 列附近的强震源,否则其产生的震动将不同程度地破坏平面波的前提假 设,其产生的体波(纵、横波)也可能对频散提取产生影响。
问题?
2013年4月 杭州
排列选择-嵌套三角形排列(示例2)
两组嵌套三角形,共19个检波器同时采集数据,数据处理时可分别处理
(1~10)和(10~19)通道数据,也可同时处理所有通道的数据。
2013年4月 杭州
排列选择-“L”形排列
1
将检波器布设成“L”形折线, 折点处有一检波器。
6
11
2013年4月 杭州
采样参数
通常情况下,分不同时段采集天然源面波数 据,每段30秒至2分钟,每个记录保存在不 同的文件中,记录的总长度不宜少于10分 钟,例如每个记录采集1分钟,则需要采集 10个记录
当然,偶尔产生的干扰,可以在数据处理时剔除。
如果排列附近强震源的坐标位置已知,则可按人工源处理数据。
瑞雷面波勘探

瑞雷面波勘探及软件应用摘要本文主要介绍SWS型多波列数字图象工程勘察与工程检测仪和其配套的SWS瞬态面波数据处理软件的使用方法,通过对其工作原理和瑞雷面波理论的介绍,说明多道面波采集系统在发展瞬态面波法方面的关键作用。
并且通过一个实例具体说明如何使用该仪器进行野外数据的采集及数据处理软件的使用。
关键词SWS瞬态面波数据处理软件;多道面波采集系统;瞬态面波法AbstractThis text introduce SWS type many wave arrange digital vision project reconnoitre wave operation method ,data processing of software the related to project detector and its SWS transient state mainly,Pass to its operation principle and theoretical introduction of auspicious Ray a wave,Prove many dishes of surface wave gather system wave key effect ,law of developing transient state。
And concrete to prove how about to use this software to go on datum gathering ,graph processing and analysing through one instance。
KeywordsWave data processing software SWS; Many dishes of surface wave gather the system; Wave law the transient state目录前言 (1)1.工作目的及原理 (2)1.1工作目的 (2)1.2瞬态瑞雷面波法的原理 (2)2. 野外工作方法 (4)2.1仪器介绍 (4)2.2数据采集 (4)2.3注意事项 (6)3瞬态面波数据处理软件 (8)3.1 软件简述 (8)3.1.1 数据处理概要 (8)3.1.2 SWS软件依据的原理 (8)3.2处理过程 (8)3.2.1 文件处理流程页面 (8)3.2.2 X-T域处理页面 (10)3.2.3 F-K 域处理页面 (10)3.2.4 Z-V 域处理页面 (11)3.2.5 辅助页面(清理X-T文件,对比SWS文件,共用图形工具) (14)4 应用实例 (15)致谢 (19)参考文献 (20)附图 (21)前言瑞雷面波是沿地表传播的一种弹性波。
采集参数论证中若干参数的确定
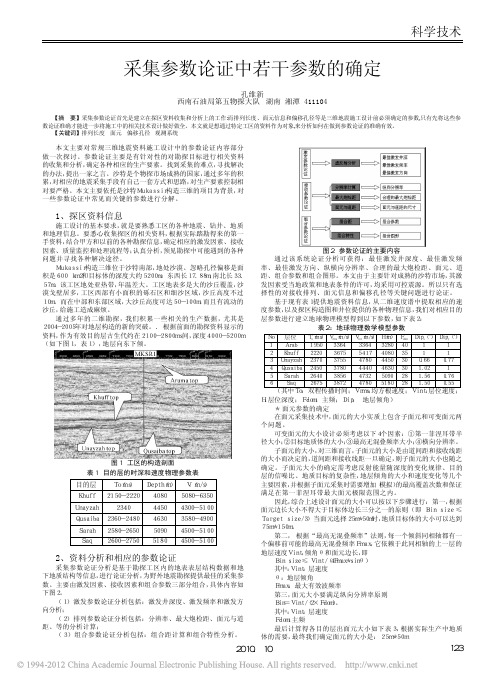
No 目的层 Vint(m /s) 1 Khuff 5417 2 Unayzah 4780 3 Qusaiba 4440 4 Sarah 4732 5 Saq 4780 Fdom Dip x( ) 35 1 30 1 30 0.66 28 1 .02 28 1 .56
3、观测系统和工作量的确定
* 观测系统的确定 根据上面的参数论证,我们提供下列三种方式的确观测系统,如表 5、图5 表5 :三种观测系统的参数
观测系统 道距 ( m ) 面元尺寸 接收线 接收线距 ( m ) VP 点距 ( m ) 每测线的道数 方案 1 1 6L2S240T 50 25m ×50m 1 6 200 100 240 50 5975 25 1550 50 6172. 8 55.9 0.25 200 200 VPs/km
(其中To:双程传播时间;Vrms:均方根速度;Vint:层位速度; H:层位深度;Fdom:主频;Dip: 地层倾角) * 面元参数的确定 在面元采集技术中, 面元的大小实质上包含子面元和可变面元两 个问题。 可变面元的大小设计必须考虑以下4 个因素:①第一菲涅耳带半 径大小;②目标地质体的大小;③最高无混叠频率大小;④横向分辨率。 子面元的大小,对三维而言,子面元的大小是由道间距和接收线距 的大小而决定的,道间距和接收线距一旦确定,则子面元的大小也随之 确定。子面元大小的确定需考虑反射能量随深度的变化规律、目的 层的信噪比、地质目标的复杂性,地层倾角的大小和速度变化等几个 主要因素,并根据子面元采集时需要增加(模拟)的最高覆盖次数和保证 满足在第一菲涅耳带最大面元极限范围之内。 因此,综合上述设计面元的大小可以按以下步骤进行:第一,根据 面元边长大小不得大于目标体边长三分之一的原则(即 Bin size ≤ Target size/3)当面元选择25m*50m时,地质目标体的大小可以达到 75m*150m。 第二, 根据“最高无混叠频率”法则,每一个倾斜同相轴都有一 个偏移前可能的最高无混叠频率Fmax,它依赖于此同相轴的上一层的 地层速度Vint,倾角θ和面元边长,即 Bin size ≤ Vint/(4Fmax*sinθ) 其中:Vint: 层速度 θ: 地层倾角 Fmax: 最大有效波频率 第三, 面元大小要满足纵向分辨率原则 Bin=Vint/(2×Fdom)。 其中:Vint: 层速度 Fdom:主频 最后计算得各目的层出面元大小如下表3 , 根据实际生产中地质 体的需要, 最终我们确定面元的大小是:25m*50m
KLseis快速手册
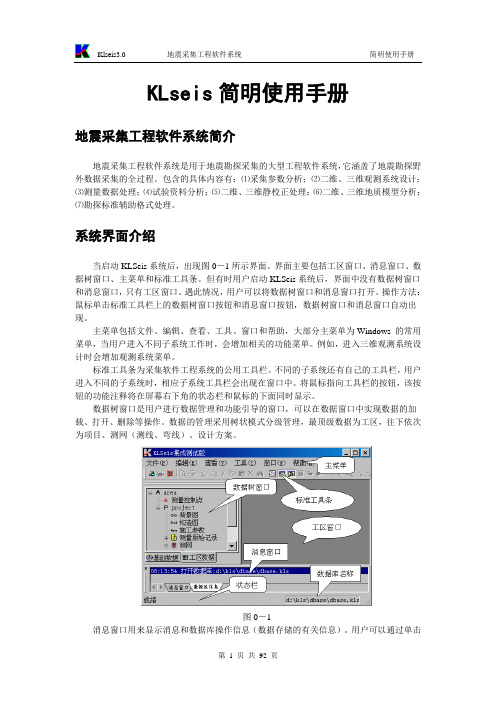
KLseis简明使用手册地震采集工程软件系统简介地震采集工程软件系统是用于地震勘探采集的大型工程软件系统,它涵盖了地震勘探野外数据采集的全过程。
包含的具体内容有:⑴采集参数分析;⑵二维、三维观测系统设计;⑶测量数据处理;⑷试验资料分析;⑸二维、三维静校正处理;⑹二维、三维地质模型分析;⑺勘探标准辅助格式处理。
系统界面介绍当启动KLSeis系统后,出现图0-1所示界面。
界面主要包括工区窗口、消息窗口、数据树窗口、主菜单和标准工具条。
但有时用户启动KLSeis系统后,界面中没有数据树窗口和消息窗口,只有工区窗口。
遇此情况,用户可以将数据树窗口和消息窗口打开。
操作方法:鼠标单击标准工具栏上的数据树窗口按钮和消息窗口按钮,数据树窗口和消息窗口自动出现。
主菜单包括文件、编辑、查看、工具、窗口和帮助,大部分主菜单为Windows 的常用菜单,当用户进入不同子系统工作时,会增加相关的功能菜单。
例如,进入三维观测系统设计时会增加观测系统菜单。
标准工具条为采集软件工程系统的公用工具栏。
不同的子系统还有自己的工具栏,用户进入不同的子系统时,相应子系统工具栏会出现在窗口中。
将鼠标指向工具栏的按钮,该按钮的功能注释将在屏幕右下角的状态栏和鼠标的下面同时显示。
数据树窗口是用户进行数据管理和功能引导的窗口,可以在数据窗口中实现数据的加载、打开、删除等操作。
数据的管理采用树状模式分级管理,最顶级数据为工区,往下依次为项目、测网(测线、弯线)、设计方案。
图0-1消息窗口用来显示消息和数据库操作信息(数据存储的有关信息)。
用户可以通过单击消息窗口下部的消息窗口标签和数据库信息标签进行切换。
消息窗口和数据树窗口可以随时打开和关闭。
工区窗口是用户进行工作的主窗口。
在刚打开时,工区窗口中并没有可以工作的窗口,当用户打开或创建一个设计方案后,该方案的工作窗口(观测系统设计窗口)才出现,此时用户可以进行观测系统设计。
主菜单当用户进入采集系统时,主菜单包括文件、编辑、查看、工具、窗口和帮助。
数据采集标准规范

数据采集标准规范
数据采集是指通过各种手段获取和收集信息的过程,是数据分
析和决策的基础。
在进行数据采集时,需要遵循一定的标准和规范,以确保数据的准确性、完整性和可靠性。
本文将就数据采集的标准
规范进行详细介绍,希望能对您有所帮助。
首先,数据采集的标准规范包括以下几个方面:
1. 数据采集目标明确。
在进行数据采集之前,需要明确数据采集的目标和用途。
只有
明确了数据采集的目标,才能有针对性地进行数据采集,避免采集
到无效或冗余的数据。
2. 数据采集方法合理。
数据采集方法包括问卷调查、实地观察、网络爬虫等多种形式。
在选择数据采集方法时,需要根据具体情况合理选择,确保数据的
准确性和可靠性。
3. 数据采集工具选择恰当。
数据采集工具包括各类软件、设备等。
在选择数据采集工具时,需要考虑数据采集的环境和条件,选择适合的工具进行数据采集,
以确保数据的质量。
4. 数据采集过程规范。
数据采集过程需要按照一定的规范进行,包括数据采集的时间、地点、方式等。
在数据采集过程中,需要严格按照规范进行操作,
避免出现误差和偏差。
5. 数据采集结果验证。
数据采集完成后,需要对采集的数据进行验证和核实,确保数
据的准确性和完整性。
只有经过验证的数据才能作为分析和决策的
依据。
总结一下,数据采集的标准规范是确保数据质量的关键,只有
严格遵循标准规范,才能采集到准确、完整、可靠的数据,为后续
的数据分析和决策提供有力支持。
希望本文对您有所帮助,谢谢阅读!。
GE_16排CT_参数表

备注:
如果需要修改以及添加在各大技术参数栏目中请用红字表示
如果是第三方的产品必须说明,并且注明第三方的产品、厂家以及型号等等用红字表示所有临床应用软件必须注明在操作台、工作站或同时完成用红字表示
国际论证、国内论证如果目前没有应该注明,如已经申报中也应该注明
本技术参数为一年有效,所有的软件以及功能必须全部补充到表中,如果没有填写在一年中不能够添加及修改。
球管保用方法是要求与以后购买球管保用方法于本条款一致。
煤矿采区高密度三维地震采集参数讨论

Vol. 48 No.6Dec. 2020第48卷第6期2020年12月煤田地质与勘探COAL GEOLOGY & EXPLORAHON文章编号:1001-1986(2020)06-0025-08煤矿采区高密度三维地震采集参数讨论程建远,王千遥,朱书阶(中煤科工集团西安研究院有限公司,陕西西安710077)摘要:随着煤矿采区高密度三维地震技术的不断推广,对其采集参数选择有了新的认识,特别是线束方向、线距大小、最大炮检距以及覆盖次数与CDP 面元等关键采集参数的选择。
从理论计算 到工程实践角度,对煤矿采区高密度三维地震采集参数进行了分析与讨论,认为:道距、线距、炮点距、炮线距的大小与面元尺寸大小密切相关,能否实现无假频空间采样取决于面元大小,增 大线距有利于提高性价比;以煤层构造勘探为目标的前提下,最大炮检距可以大于目的层埋深;在地震条件良好地区,高密度三维地震设计的覆盖次数不宜太高,以提高分辨率;高 密度三维地震是面积采集、立体勘探,其线束方向设计不应受制于构造走向的约束。
通过不同面元大小、不同覆盖次数以及大线距采集的典型工程实例,初步印证了上述结论的正确性。
移动阅读关 键词:煤矿采区;高密度三维地震;两宽一高;面元大小;覆盖次数中图分类号:P631 文献标志码:A DOI: 10.3969/j.issn. 1001-1986.2020.06.004Discussion on parameters of high density 3D seismic exploration acquisitionin coal mining districtsCHENG Jianyuan, WANG Qianyao, ZHU Shujie(Xfan Research Institute Co. Ltd., China Coal Technology and Engineering Group Corp., Xi'an 710077, China)Abstract: High density 3D seismic technology is being popularized in coal mining districts, but there is some con fused understanding about its acquisition parameters design up to now. For design of the direction of the swath, the interval of lines, the maximum offset, the CDP multiplicity and bin size, this paper analyzed and discussed these key acquisition parameters from the theoretical calculation to the engineering consideration. The result is:The bin size is related to geophone interval, line space, shot point distance and shot lines distance, space acquisition withoutalias depends on the size of the surface element, and the increase of the line spacing is favorable for improvementof the cost performance ratio; If the purpose is aimed at coal and structural exploration, the maximum offset may be greater than the burial depth of the target layer; In the areas with good seismic conditions, it is better for the cov erage times of high density 3D seismic to be 24 times rather than too high; The design of the swath direction should% be restricted by the tectonic strike because high density 3D seismic exploration is 3D exploration by meansof area acquisition. In the end, the paper gives several successful examples about different surface element size, different fold number and large line spacing, which shows the correctness of the above conclusions.Keywords: coal mining districts; high density 3D seismic exploration; wide band, wide azimuth and high foldnumber; surface element size; fold number1988年L. OngkiehongE 首次提出了“不受约束 的采集”思想。
电池放电监控系统操作说明
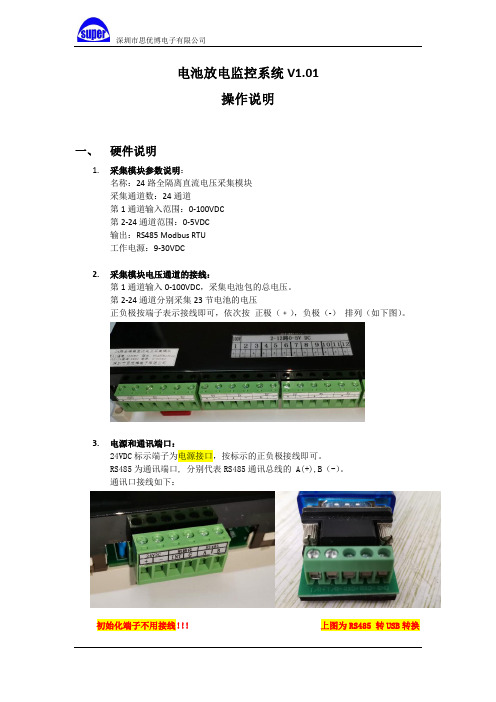
电池放电监控系统V1.01操作说明一、硬件说明1.采集模块参数说明:名称:24路全隔离直流电压采集模块采集通道数:24通道第1通道输入范围:0-100VDC第2-24通道范围:0-5VDC输出:RS485 Modbus RTU工作电源:9-30VDC2.采集模块电压通道的接线:第1通道输入0-100VDC,采集电池包的总电压。
第2-24通道分别采集23节电池的电压正负极按端子表示接线即可,依次按正极(﹢),负极(-)排列(如下图)。
3.电源和通讯端口:24VDC标示端子为电源接口,按标示的正负极接线即可。
RS485为通讯端口, 分别代表RS485通讯总线的 A(+),B(-)。
通讯口接线如下:初初始化端子不用接线!!!上图为RS485 转USB转换端子 A 接 T/R+,端子 B 接T/R- (***RS485转USB需方准备)二、软件说明1.监控软件的环境:监控软件运行在Windows 64位的环境。
2.监控软件的解压和打开:将yichi v1.01.rar 解压到相应的磁盘(一般建议是非系统盘),选择解压到yichi v1.01即可。
在解压后的文件夹yichi v1.01中找到执行文件,双击打开。
3.监控软件界面划分:监控软件界面分为数据显示区、电池包信息区、系统信息反馈区、用户设定区。
数据显示区:规划有24个显示单元,由于采集模块中拿了一个通道来采集总电压,现24# 电池暂不参与显示和判断。
采集模块第一个通道对应电池包的总电压。
采集模块第二个通道对应1#电池,采集模块第三个通道对应2#电池….依次类推。
界面24个显示单元参数说明:初始电压:第一次采集到的电池电压,单位V。
实时电压:每次读到的电压,单位V。
电压差值:初始电压–实时电压得到的差值,单位mV。
PASS: 默认是显示PASS,绿色背景,报警时显示NG,红色背景。
电池包信息区:电池包编码:电池包的名称,建议每个电池有唯一的编码;启动默认为:越野滑板72V100AH ZHH25。
ITCP-4017数据采集用户手册

1. 目录1.ITCP-4017功能简介 (1)1.1 重要技术指标 (2)1.1.1 模拟量输入 (2)1.1.2 数字量输出 (2)1.1.3 系统参数 (2)1.2 原理框图 (3)1.3 端子信息 (4)1.3.1 端子排列 (4)1.3.2 端子描述 (4)1.4 电气参数 (5)1.5 通信参数配备 (5)1.6 信号批示灯 (6)1.7 电源和通讯线旳连接 (6)1.7.1 电源连接 (6)1.7.2 网络连接 (6)1.8 机械规格 (7)1.8.1 机械尺寸 (7)1.8.2 安装方式 (7)2.ITCP-4017旳模拟量输入功能 (9)2.1 模拟量输入 (9)2.2 输入采样原理 (9)2.3 输入接线 (9)2.4 采样值计算 (9)2.4.1 最高位符号位 (9)2.4.2 ADC数据类型 (10)2.4.3 有符号整型 (10)2.4.4 量程比例 (10)2.5 模拟量输入通道控制 (10)3.ITCP-4017旳数字量输出功能 (11)3.1 输出原理 (11)3.2 输出接线方式 (11)3.3 数字量输出通道控制 (12)4.ITCP-4017应用示例 (13)4.1 安装设备 (13)4.2 操作设备 (13)4.2.1 ITCP系列模块通信参数旳修改 (13)4.2.2 RJ-45以太网主机通信参数设立 (14)4.2.3 模块信息配备 (14)4.2.4功能操作 (16)4.2.4.1模拟量输入 (17)5.ITCP-4017 命令简析 (18)5.1 MODBUS/TCP合同命令构造 (18)5.2 MODBUS/TCP命令码简介 (19)5.3 ITCP资源地址阐明 (19)5.3.1 ITCP-4017旳资源地址 (19)6免责声明 (20)2. ITCP-4017功能简介ITCP-4017是模拟量输入采集模块, 可以同步采样8路旳差分信号, 采样精度高达16位。
野外地震队采集基础知识及工作流程

野外地震队采集基础知识及工作流程野外采集是一个系统工程,其中的每一个环节都互相影响互相制约,都对最终采集质量有着不同影响。
为了更好地执行海外地震采集任务,有必要对一些基本的地球物理勘探知识和野外工作流程做一个系统的了解。
本文将针对野外地震采集工程,对一些基本的基础知识和野外采集工作流程做一个系统的介绍1野外采集基础知识系统的掌握野外地震采集的一些必要的基础知识是顺利执行野外地震勘探的基础,不管你处在什么岗位上,要想在野外大显身手,都必须具备必要的理论知识。
下面将从基本概念、观测系统、地震波激发、接收以及野外采集常用软件几个方面概要的介绍一下野外采集的一些基础知识。
1.1基本物探知识1.1.1几个重要的基本概念1.1.1.1 地震波(Seismic Wave)地震波是一种在介质中从一点到另一点传播的弹性扰动。
地震波有几种类型,包括:●两种体波:纵波和横波●面波:瑞利波(地滚波)、斯通莱波、勒夫波、管波1.1.1.2 炮点(Source Point)炮点是指激发地震波能量的位置,激发源可能是炸药、气枪、重锤、可控震源等。
如果采用震源组合,炮点通常指组合中心。
1.1.1.3 炮点距(Source Interval)炮点距指相邻炮点间的距离。
1.1.1.4 炮点线(Source Line)炮点线指炮点沿之布设的一条线,炮点通常等间距布设。
1.1.1.5 炮线距(Source Line Interval)在三维勘探中,相邻炮线间的距离称为炮线距,通常沿垂直于炮线的方向测量该距离。
1.1.1.6 接收点(Receiver Station)接收点指检波器的组合中心位置1.1.1.7 道间距(Receiver Interval)道间距也就是既接收点距,指相邻接收点间的距离。
1.1.1.8 接收线(Receiver Line)接收线指接收点沿之布设的一条线。
1.1.1.9 接收线距(Receiver Line Interval)在三维勘探中,相邻接收线间的距离称为接收线距,通常沿垂直于接收线的方向测量该距离。
2021年GE_16排CT_参数表
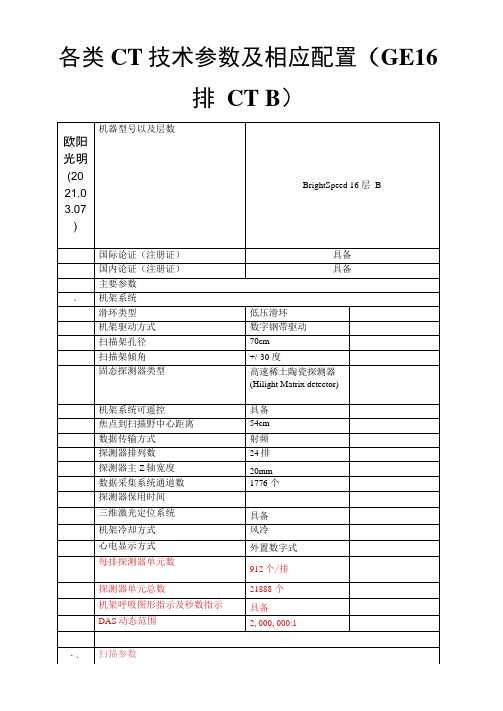
各类CT技术参数及相应配置(GE16
排CT B)
备注:
如果需要修改以及添加在各大技术参数栏目中请用红字表示如果杲第三方的产品必须说明,并且注明第三方的产品、厂家以及型号等等用红字表示
所有临床应用软件必须注明在操作台、工作站或同时完成用红字表示
国际论证、国内论证如果目前没有应该注明,如已经申报中也应该注明
本技术参数为一年有效,所有的软件以及功能必须全部补充到表中,如果没有填写在一年中不能够添加及修改。
球管保用方法是要求与以后购买球管保用方法于本条款一致。
NZXP Geode操作手册

乔美特利StrataVisor NZXP/Geode 地震仪操作手册软件的注册:GEOMETRICS NZXP/GEODE的采集控制软件需要注册,在安装软件完成后,计算机桌面会出现快捷方式注册首页如下:软件在没有注册的情况下,可使用100小时.提供用户码USER CODE 到GEOMETRICS 或劳雷公司我们会提供注册码.一.仪器的连接:A. NZXP 的连接:12V power: 用随仪器提供的电源电缆,连接到12V 汽车电瓶,红夹子为正极,黑夹子为负极. ON/OFF: 开机/关机电源开关.TRIGGER: 触发同步输入. 锤击开关/爆炸机等震源同步仪器信号输入. GEOPHONES: 地震道检波器输入,通常仪器在测线中间, 1-12和13-24 两个输入插头. CORRLATOR: 当使用可控震源时,参考道输入.B. GEODE 的连接:电源输入: 连接到12V 电源,建议采用17-20安时电池可满足10小时不中短采集.数传线连接口连接到计算机连接此符号到计算机方向计算机或NZXP连接检波器: 注意Y型转换电缆前后12道插头是有区别的.二. 仪器主采集菜单:1.SURVEY: 测点名称,测线号的输入.2.GEOM: 排列设置,输入炮点,检波器点的桩号,道间距,炮间距及排列滚动方式.3.OBSERVER: 备注, 输入天气,仪器操作员等信息.4.ACQUISITION: 采集参数设置.采样率,记录长度,采集滤波器,叠加方式,采集道/无效道设置,前放增益的设置.5.FILE: 文件设置地震数据文件名,存储的文件夹,数据文件格式,及回放读取数据.6.DISPLAY: 显示, 调整显示方式, 包括调整单炮记录的显示方式,频谱显示方式等.7.DOSURVEY: 测量, 这个菜单使用率最高,是否容许放炮,清除内存,存盘,打印,手动排列滚动,操作快捷键.8.WINDOWS: 调整显示窗口.9.ANSWER: 折射解释10.PRINT: 调整打印方式.11.SYSTEM: 系统. 调整仪器时间,日期,触发方式,检波器测试,内触发,仪器关机等.三.仪器操作状态栏:仪器状态栏显示仪器的工作状态,包括是否允许放炮,显示方式,叠加状态,存储状态,炮点桩号.四. 排列设置显示窗口, 显示排列方式,触发位置(炮点桩号),及显示激活采集道和不采集道.5. 显示窗口:1.SHOT WINDOW: 单炮记录窗口,显示单炮地震记录.2.NOISE MONITOR WINDOW: 噪音实时监视窗口.3.TEST SURVEY.0001.LOG电子班报窗口,其中TEST SURVEY是电子班报的文件名,又称日志文件.4.SPECTRA WINDOW. 地震波频谱窗口.六: 操作细则:1.SURVEYSURVEY NAME: 输入测量名称,也就是日志文件名.INITIAL LINE NUMBER: 初始的测线号.INITIAL TAPE LABLE: 初始磁带卷标.2. GEOM: 排列参数设置.1)SURVEY MODE: 测量方式2)GROUP INTERV AL: 检波器道间距.3)GROUP/SHOT LOCATIONS: 检波器/炮点桩号设置.SHOT COORDINA TE: 输入炮点桩号.INTERV AL: 输入道间距(如果道间距不等的话) GEOPHONE COORDINA TE: 检波器桩号.GAIN: 前放增益(另有菜单设置,见采集菜单)USE: 地震道使用情况(可在采集菜单设置) FREEZE: 冻节. 冻节地震道数据,不参与叠加,保护数据.4)ROLL PARAMETER: 排列滚动方式设置. 一般情况下,炮点和检波点同步滚动,排列可向右滚(大号),或向左滚(小号).可以自动滚动,但是必须文件自动存盘.3. 备注: 编辑仪器操作注示, 操作员名字,天气情况等.4.ACQUISITION : 采集参数设置1)sample interval /record length. 采样率/记录长度设置.SAMPLE INTERV AL: 采样率. 地震波所采集的高截频.RECORD LENGTH: 记录长度.DELAY: 记录延迟2)ACQUISITION FILTER: 采集滤波. 仪器有两个滤波器, 可选择低切,高切,陷波滤波器,滤波器陡度-24dB/倍频程, 也可两个滤波器选择相同频率,则陡度增加一倍.(-48dB/倍频程).3)CORRELATION 相关处理.如果选用可控震源,输入扫描长度,听长度及参考道的位置.如果使用脉冲震源,则选择OFF.4)STACK OPTION: 叠加方式选择.STACK LIMIT: 叠加极限(叠加次数)AUTO STACK: 自动叠加. 仪器自动将地震数据叠加到上次(相同炮点)的数据中,以达到提高信躁比.REPLACE:替换. 地震数据将替换原有内存中的数据(不进行数据叠加). 在采用炸药震源时,多采用此方式.STACK POLARITY POSTIVE: 叠加极性, 可更换所有道的信号极性.如初至首波正跳或负跳5)SPECIFY CHANNELS. 设置特殊道. 可关闭某些不使用的道,如测井可能只使用6道. 用1 输入为地震数据道, 2 为辅助道,4 为无效道(即关闭该道)6)PREAMP GAINS: 设置地震道前放增益, 输入3放大为24dB, 4 为36dB.在所有的采集道数中,可设置部分道数前放增益24dB,而另一部分为36dB.6)STACK POLARITY: 可正也可负,即地震记录首波可正起跳,也可负起跳.5.FILE: 文件管理1)STORAGE PARAMETERS: 存储参数.NEXT FILE NUMBER: 下一个地震记录的文件号.AUTO SA VE: 自动存盘, 如果选择仪器自动存盘.STACK LIMIT: 在选择自动存盘的情况下,输入叠加次数,在激发达到输入的次数后,仪器自动存盘.DA TA TYPE: 数据文件的格式. SEG-2, SEG-D和SEG-Y 均为国际标准地震格式,其中,SEG-D和SED-Y 在石油及煤田勘探更多使用.工程一般使用SEG-2.SA VE TO DISK: 存盘, DRIVE, 存在哪个硬盘上,PA TH, 存储的文件夹.SA VE TO TAPE: 如果有磁带机,选择将数据记录在磁带上,选择此项.2)READ DISK: 数据回放,查看以前采集的数据.进入数据存储的文件夹,选择文件.6.DISPLAY: 显示方式(改变此菜单的任何选项, 只是改变显示方式,均不会改变地震数据)1)SHOT PARAMETERS: 单炮记录显示参数DISPLAY BOUNDRY: 显示地震的起始道和终了道,起始时间和终了时间.GAIN STYLE: 增益设置FIX GAIN: 固定增益.AGC: 自动增益控制. 在设置自动增益控制时,需要输入AGC 窗口,此窗口将提供AGC增益计算调整的窗口.NORMALIZE: 归一化的显示方式.TRACE STYLE: 调整显示方式.V ARIABLE AREA: 变面积显示方式. 波性正向涂黑.如见下图WIGGLE TRACE: 波形以轨迹方式显示.见下图.此方式目前拥护较少使用.SHADED AREA: 阴影显示方式. 见下图.此显示方式用户使用较少.DISPLAY GAIN: 显示增益设置. 显示增益调整方式有四种方式:AUTO SCALE TRACES: 自动调整幅度.ADJUST ALL: 调整所有的道: 手动调整所有道的幅度. 上箭头增加,下箭头减少,每次3分倍.INDIVIDUAL: 分别的调整每道的幅度, 上下箭头增加或减少幅度,左右箭头改变道数.DISPLAY FILTERS: 显示滤波, 可对地震记录进行滤波.OFF 为不加滤波器.ENABLE DISPLAY FILTER: 启动显示滤波器ROLL-OFF: 滤波器的陡度.HIGH CUT: 高切, LOW CUT:低切, NOTCH: 陷波器材(中国50Hz工频)2)SPECTRA PARAMETERS频谱参数设置DISPLAY BOUNDARY: 调整显示起始道和终了道的频谱及频谱频率范围.ANAL YSIS PARAMETERS: 频谱计算的方式.3)NOISE MONITOR PARAMETERS: 噪音监视的参数.通常此参数以快捷键方式设定,如5mv 表示相临道的幅度为5mv. 此参数越小,说明测线噪音背景越好.4)GEOMETRY TOOL BAR DISPLAY SETTING. 调整显示排列工具窗口的参数.7.DO_SURVEY 测量此窗口经常使用1)ARM/DISARM: ARM 准许放炮,同时仪器桩态栏为绿色. DISARM 不准许放炮(仪器没有准备好,不接受触发).仪器状态栏为红色.2)CLEAR: 内存清零. 清除内存内的数据,准备新数据进入.3)SHOT LOCATION: 确认炮点桩号.4)MAXIMIZE NOISE MONITOR WINDOWS. 仪器全屏显示实时噪音监视窗口.以便易于观察.见下图.5)MAXIMIZE SHOT WINDOW: 最大炮记录窗口. 全屏显示炮纪录.6)AUTO SCALE TRACE: 自动调整信号幅度.7)SA VE: 存盘8)PRINT SHOT RECORD: 打印炮记录.0)RESTORE ALL WINDOWS BUT HIDDEN WINDOWS: 恢复所有的显示窗口. ROLL CHANNEL UP 手动完成排列的滚动,向大号(右边)滚动.ROLL CHANNEL DOWN: 手动完成排列的滚动,向小号(左边)滚动.FREEZE CHANNELS: 冻节地震道.HOT KEYS DESCRIPTION: 快捷键描述.8.WINDOWS 调整显示窗口.1.MAXIMIZE NOISE MONITOR WINDOW: 最大噪音监视窗口.全屏显示2.MAXIMIZE SHOT WINDOW: 最大单炮记录窗口. 全屏显示3.MAXIMIZE SPECTRA WINDOW 最大频谱显示窗口. 全屏显示4.MAXIMIZE LOG WINDOW 最大日志文件显示窗口.7. TILE ALL WINDOWS HORIZONTALL Y: 水平显示所有的窗口.8.TILE ALL WINDOWS VERTICALL Y: 垂直显示所有的窗口.VIEW GEOMETRY TOOL BAR: 显示或关闭排列工具窗口.VIEW NOISE MONITOR WINDOW: 显示或关闭噪音监视窗口.VIEW SHOT WINDOW: 显示或关闭炮记录的窗口.VIEW SPECTRA WINDOW: 显示或关闭频谱窗口.9.ANSWER 折射解释1) PICK BREAK: 初至拾取, 进入该菜单后,屏幕会出现一条水平红时线和一条水平红虚线. 用上下箭头移动调整, 以达到初至的范围, 用TAB键,切换到红虚线,调整到最道的初至首波, 用两段红线,圈定初至首波的范围.完成后按ENTER确认键.仪器会自动拾取初至, 见下图.此时,可继续手动调整不合理的初至首波.完成后ENTER确认,存储文件以.BPK 后缀.2)SOLVE REFRACTION USING SIPQC: 解释折射用SIPQC软件.首先要输入要解释的数据文件, 输入的文件格式后缀为本.BPK.该软件采用相域的方法解释,可以多炮联合解释,最多7炮. 解释分层最多为5 层.数字表示为解释的地层数,移动光标,可修改拐点位置.继续按CONTINUE, 会出现如下选择TOGGLE PLOT 可看到解释结果.如下图选择PRINT REPORT, 可完成打印解释结果.10.P RINT 打印1)SHOT PARAMETERS: 调整炮打印记录设置.AUTO PRINT INTERV AL: 自动打印炮记录,如果希望每炮记录都打印,则输入1. 如果希望每五炮打印一张,则输入5.FIT IN ONE PAGE: 地震记录打印在一张纸上. NORMAL: 通常的打印长度.EXPAND: 打印时间扩展.COMPRESS BY 2: 压缩时间记录打印2倍. COMPRESS BY 4: 压缩时间记录打印4倍. PRINT SETUP: 打印机设置.(如选择不同的打印机) 2)SPECTRA PARAMETERS: 打印频谱图.11.S YSTEM 系统1). SET DATE/TIME/UNITS: 设置日期/时间/单位.用TAB 键切换窗口,输入正确的日期和时间. UNITS: 单位, 米或英制英尺.2)TRIGGER OPTIONS 触发选项.TRIGGER HOLDOFF: 触发保持时间, 两次触发间隔至少要0.2秒.ARM MODE: 准许放炮的方式选择: AUTO 每完成一次触发后,仪器自动到准许放炮的方式, MANUAL: 每完成一次触发后,手动选择准许放炮方式.TRIGGER SENSITIVITY: 触发灵敏度调整. 键头靠右,表示触发灵敏度越高,也即是仪器越容易触发. 注意:在使用锤击开关和HVB-1 爆炸机时,不需要调整.只有用检波器触发仪器时,才会用到调整触发灵敏度.3)TEST: 测试, RUN GEOPHONE TEST. 测试检波器通断.UPDATE ACQUISITION BOARD BIOS. 升级仪器采集板的固化程序. (此项不建议用户自己完成).4)SELECT REPEA TER BOARD为了加大采集站的数据传输距离, 可以把一个采集站的地震道采集功能关闭,使其成为一个只完成数据传输的功能.5)SERIAL I/O: 串口输入/输出可在仪器串口接入GPS, 同时仪器还可通过串口输出信息,如文件号.6)MANUAL TRIGGER: 手动触发, 触发仪器测试.7)CONFIGURATION STATUS: 配置状态, 显示采集板的配置状态及固化软件等信息.8)ALARM SETUP: 提醒鸣叫设置, 如硬盘接近90%数据存满.9)CHANNEL REMAPPING: 道序再编排. 此功能可改变道序编排.对于使用多个采集站GEODE 和笔记本计算机组成的系统, 仪器软件始终识别最靠近计算机的采集站为第一个站,对应采集道为1-24道.见下图.这时,采集的数据道序是错误的.可能会得到如下的炮记录.这时候,可通过软件重新编排道序.重新编排方法如下:用TAB 键选择到ENABLE CHANNEL REMAPPING MODE 用·激活此功能. REVERSE GEODE ORDER IN LINE 1: 颠倒一线GEODE 的顺序. 以上图为例, 原GEODE 顺序是:3------2-------1----计算机----4------5-------6选择此项功能后,GEODE的顺序是:1------2-------3---计算机---4-----5-------6经过编排后的炮记录如下:REVERSE GEODE ORDER IN LINE 2: 颠倒二线GEODE的顺序.(二线,计算机须有两块往卡).REVERSE CHANNEL ORDER OF EACH GEODE IN LINE 1: 改变每个GEODE的道序.原道序号为:24—23—22—21—20----------------------------------2—1选择此功能后, 1—2—3—4-----------------------------23—24OVERRIDE AUTOMATIC CHANNEL MAP WITH MAP MODE: 手动编排道序.可以用手动的方式重新编排道序.比如:98 道系统, 你可以重新编排手动输入: 98 2-97 1则显示结果为: 检波器98 道被安排到1 道, 2—97 道正常, 不做改变,地面的第一道检波器被安排在98 道.又比如: 100道系统, 100-1编排后: 100道被安排在1 道, 99道被安排在2, 98道被安排在3 , 等等.又比如: 50 道系统, 4 2-3 50 5-30 1 32-49 31. 编排后如下:检波器第四道, 安排在道1检波器第2-3道, 不改变在原位置.检波器第50道, 安排在4道.检波器第5-30 道, 不改变在原位置.检波器第1 道, 安排在31 道.检波器第32-49,不改变安排在原位置.检波器第31道, 安排在50 道位置.VERSION: 软件的版本号, 该软件需要注册, 请不要重新注册.0 CLOSE CONTROLLER: 退出软件并关闭WINDOWS系统. 关机. 如果希望退出地震软件,到WINDOWS 平台,请用外接键盘ALT+F4 或用外接鼠标.快捷键描述:快捷键要在屏目没有其他菜单激活的情况下使用:1.ARM/DISARM 准许放炮触发/不准许触发切换.2.CLEAR 清除内存3.SHOT LOCATION 确认或修改炮点桩号.4.MAXIMIZE NOISE MONITOR WINDOW 最大噪音监视窗口.5.MAXIMIZE SHOT WINDOW 最大炮记录窗口.6.AUTO SCALE TRACES 自动调整道幅度.7.SA VE 存盘.8.PRINT SHOT RECORD 打印单炮记录.0.RESTORE ALL WINDOWS 恢复显示所有的窗口.在最大噪音监视窗口:↑上箭头,增加道间灵敏度.↓下箭头,减小道间灵敏度.在最大单炮记录窗口→右箭头, 调整所有道的幅度, ↑增加幅度, ↓减少幅度.←左箭头, 单道调整道幅度, ↑↓上下键头,增加/减少幅度.←→左右箭头改变道数.请熟记以上快捷键操作方式,将使您的操作更加简单,快速.。
如何利用电脑进行视频采集和编辑制作

如何利用电脑进行视频采集和编辑制作在现代社会,随着科技的不断发展,电脑已经成为我们生活中不可或缺的一部分。
除了日常工作和娱乐,我们还可以利用电脑进行视频采集和编辑制作,创造出属于自己的影像作品。
本文将介绍如何利用电脑进行视频采集和编辑制作的基本步骤和技巧。
一、视频采集视频采集是指将摄像机或其他设备拍摄的视频文件导入到电脑中的过程。
首先,我们需要一台摄像机或手机来拍摄视频。
拍摄时要注意光线、角度和稳定性,以确保拍摄的画面质量。
拍摄完成后,将摄像机或手机连接到电脑上,通过USB线或其他连接线将视频文件传输到电脑中。
在电脑中,我们可以使用各种视频采集软件来导入视频文件。
常见的视频采集软件有Adobe Premiere、Final Cut Pro等。
打开软件后,选择“导入”或“采集”选项,然后选择要导入的视频文件所在的路径。
软件会自动将视频文件导入到项目库中,我们就可以开始进行后续的编辑制作工作了。
二、视频编辑视频编辑是将采集到的视频文件进行剪辑、调整和处理的过程。
在视频编辑软件中,我们可以对视频进行剪辑、调整画面色彩和音频音量、添加特效和字幕等操作。
1. 剪辑视频剪辑视频是将采集到的视频文件进行裁剪和拼接,以达到我们想要的效果。
在视频编辑软件中,我们可以选择要剪辑的视频片段,然后将其拖拽到时间轴上进行排列。
通过调整时间轴上的片段顺序和长度,我们可以实现对视频的自由剪辑。
2. 调整画面色彩和音频音量在视频编辑过程中,我们可以通过调整画面色彩和音频音量来改善视频的观感。
视频编辑软件通常提供了丰富的调色和音频处理工具,我们可以根据需要对视频进行亮度、对比度、饱和度等参数的调整,以及对音频进行增强、降噪等处理。
3. 添加特效和字幕为了使视频更加生动和有趣,我们可以在视频中添加特效和字幕。
视频编辑软件提供了各种特效和字幕样式供我们选择,我们可以根据视频的主题和需要选择适合的特效和字幕风格。
通过添加特效和字幕,我们可以为视频增加一些独特的元素,提升观看体验。
dem采集流程
dem采集流程DEM(离散元)是一种常用的数值模拟方法,用于模拟颗粒体系的运动和相互作用。
DEM模拟可以应用于颗粒流、颗粒堆积、颗粒振动等多个领域,在工程和科学研究中有着广泛的应用。
DEM采集流程主要包括数据准备、模型构建、模拟运行和结果分析四个步骤。
下面将一一介绍这些步骤。
1. 数据准备在DEM采集流程中,首先需要准备模拟所需的数据。
这些数据包括颗粒的物理性质(如质量、形状、弹性模量等)、颗粒间相互作用力的参数(如弹簧刚度、阻尼系数等)以及模拟所需的边界条件(如重力、壁面摩擦系数等)。
这些数据可以通过实验测量或者根据实际情况进行估计。
2. 模型构建在数据准备完成后,接下来需要构建DEM模型。
模型构建主要包括定义颗粒体系的几何形状和排列方式。
可以使用三维建模软件进行模型构建,也可以使用编程语言编写脚本进行模型生成。
在模型构建过程中,需要根据实际情况设置颗粒的初始位置、速度以及相互作用力。
3. 模拟运行模型构建完成后,就可以进行DEM模拟的运行了。
在模拟运行过程中,会根据设定的时间步长和模拟时间对颗粒体系进行演化。
DEM模拟会根据颗粒间的相互作用力和外部作用力计算颗粒的位移、速度和加速度,并更新颗粒的状态。
模拟运行的时间长度取决于模拟的目的和要求,可以根据需要进行调整。
4. 结果分析模拟运行完成后,需要对模拟结果进行分析。
结果分析可以包括颗粒的位移、速度、加速度以及颗粒之间的相互作用力等参数的统计和可视化。
可以使用数据处理软件进行结果分析,生成图表或者动画展示模拟结果。
通过对模拟结果的分析,可以获得颗粒体系的运动规律和相互作用特性,进而对实际问题进行预测和优化。
以上就是DEM采集流程的主要步骤。
在实际应用中,DEM模拟可以根据具体问题进行调整和优化,以获得更准确和可靠的模拟结果。
DEM模拟在颗粒流动、颗粒堆积和颗粒振动等领域具有重要的应用价值,可以帮助工程师和科研人员更好地理解和解决与颗粒相关的问题。
428XL仪器低频大排列采集施工案例
商杰 , 磊 , 国 良 . 2 X 黄 姜 4 8 L仪 器 低 频 大 排 列 采 集 施 工 案 例 . 探 装 备 , 0 1 2 ( ) 1 7 1 1 1 3 物 2 1 ,12 : 0 ~ 1 ,2
本 文 简 述 了低 频 、 大偏 移 距 采 集 施 工 的优 点 及 使 用 4 8 I仪 器 的 技 术 特 点 , 要 介 绍 了 4 8 器 在 华 北 工 2 X 简 2 XI仪
21 0 1年 4 月
物 探 装 备
第 2卷 1
第2 期
48 2 XL仪 器 低 频 大 排 列 采集 施 工 案 例
地震采集排列参数

2019年12月23日
27
偏移孔径
菲涅尔带
70%的偏移后能 量在此范围内
95%的偏移后的能 量在此范围内
2019年12月23日
28
偏移孔径
绕射能量归位的距离为:
d z tg
其中: d 为绕射能量归位的距离; z 为绕射点的深度; α 为绕射能量归位的角度。
2019年12月23日
41
二维模型分析
2019年12月23日
42
二维模型分析
地质模型技术的提出:
基于共反射点( CRP)的观测系统设计是解决复杂 地质结构勘探的一 个有效途径。
建立地质模型,通过射线追踪,准确的获得目的 层反射点分布及接收排列的范围,指导观测系统设 计。
2019年12月23日
25
采集排列参数
• 最大炮检距计算 • 面元与道距 • 偏移孔径 • 纵横向分辨率 • 二维模型分析
2019年12月23日
26
偏移孔径
为了使倾斜层和断层正确归位,必须进行偏移。在布署 勘探范围时,必须考虑到偏移孔径而扩大满覆盖面积。 偏移孔径主要考虑如下因素:
(1) 收集某个角度范围内的绕射能量归位所需要 的距离;
Vr
为纵向分辨率;
Vint 为目的层的层速度;
fmax 为目的层的最大频率。
2019年12月23日
32
纵横向分辨率分析
根据地震勘探分辨率分析,当最小分辨地层顶底反射 基本能够分辨时,其顶底反射时间差相当于0.4视周期。 频带相对宽度至少2个倍频程,即频带上限频率(Fmax)为 下限频率(Fmin)的4倍。
2019年12月23日
音频采样和音频采样频率和位速的说明

音频采样和音频采样频率和位速的说明2008-07-05 08:13:32 摄影|评论(1) |浏览(5020)MP3只是音频的一种格式.而音频有几个比较重要的参数,如KHZ,BIT,声道,KBP S等.而格式不同,算法也就不同,所以就算了在以上参数相同的时候,格式不同音质也会有很大差别.其中的,VBR这是一种动态的采样,详细全面的解释,请看下面的说明.耐心看完你就能说出一二来了.音频采样解释数码音频系统是通过将声波波形转换成一连串的二进制数据来再现原始声音的,实现这个步骤使用的设备是模/数转换器(A/D)它以每秒上万次的速率对声波进行采样,每一次采样都记录下了原始模拟声波在某一时刻的状态,称之为样本。
将一串的样本连接起来,就可以描述一段声波了,把每一秒钟所采样的数目称为采样频率或采率,单位为HZ(赫兹)。
采样频率越高所能描述的声波频率就越高。
采样率决定声音频率的范围(相当于音调),可以用数字波形表示。
以波形表示的频率范围通常被称为带宽。
要正确理解音频采样可以分为采样的位数和采样的频率。
1.采样的位数采样位数可以理解为采集卡处理声音的解析度。
这个数值越大,解析度就越高,录制和回放的声音就越真实。
我们首先要知道:电脑中的声音文件是用数字0和1来表示的。
所以在电脑上录音的本质就是把模拟声音信号转换成数字信号。
反之,在播放时则是把数字信号还原成模拟声音信号输出。
采集卡的位是指采集卡在采集和播放声音文件时所使用数字声音信号的二进制位数。
采集卡的位客观地反映了数字声音信号对输入声音信号描述的准确程度。
8位代表2的8次方--256,16 位则代表2的16次方--64K。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
蒋先艺
东方地球物理公司
2010年12月31日
1
采集排列参数
• 最大炮检距计算 • 面元与道距 • 偏移孔径 • 纵横向分辨率 • 二维模型分析
2010年12月31日 2
基础参数
地球物理模型
2010年12月31日
3
采集排列参数
• 最大炮检距计算 • 面元与道距 • 偏移孔径 • 纵横向分辨率 • 二维模型分析
目的层 分辨厚度(m) 15 主频率(Fm) 44.0 30.8 24.5 53.4 40.9 32.1 71.7 53.8 43.0 最小频率(Fmin) 17.6 13.2 10.6 21.4 16.0 12.8 28.7 21.5 17.2
最大频率 (Fmax)
70.4 52.9 42.3 85.6 64.0 51.3 114.8 86.1 68.9
2010年12月31日
11
最大炮检距计算
最大炮检距分析:反射系数
2010年12月31日
12
最大炮检距计算
最大炮检距分析:干扰波
当反射界面较浅时,直达波、初至折射波与反射 同向轴相交,从而产生初至波干扰,在地震数字处理 时,为了保证叠加剖面的信躁比不受干扰,必须切除 直达波、初至折射波等干扰波,因此限制了采集的最 大炮检距范围。
2010年12月31日
19
最大炮检距计算
最大炮检距分析:多次波分析
两个条件的数学表示如下:1 4
~
1 2
T
L
∆ t
其中
x
−
max
∆ t
1
x
>
min
T
1 2 vp
L
∆t
上式中 TL Δt t0 Vm Vp X X m in ,
x
=
2t
0
1 2 vm
2010年12月31日
43
二维模型分析
基于模型的参数分析
特点: 特点: 将参数分析从点推到面; 1、将参数分析从点推到面; 更直观、更方便、更全面; 2、更直观、更方便、更全面; 对解决复杂勘探问题更有效。 3、对解决复杂勘探问题更有效。
15
最大炮检距计算
最大炮检距分析:干扰波
2010年12月31日
16
最大炮检距计算
最大炮检距分析:视波长
利用视波长与炮检距的关系,可得到最小视波 长、最大炮检距和道距。
反射波旅行时曲线可得到视波长与炮检距的关系:
λ
其中 λ v f t0 x θ
2010年12月31日
∗
=
v f
•
tv
0
2
2
+
(x
x
2
2010年12月31日 26
偏移孔径
为了使倾斜层和断层正确归位,必须进行偏移。 为了使倾斜层和断层正确归位,必须进行偏移。在布署 勘探范围时,必须考虑到偏移孔径而扩大满覆盖面积。 勘探范围时,必须考虑到偏移孔径而扩大满覆盖面积。 偏移孔径主要考虑如下因素: 偏移孔径主要考虑如下因素: (1) 收集某个角度范围内的绕射能量归位所需要 的距离; 的距离; 大于第一菲涅耳带半径; (2) 大于第一菲涅耳带半径; (3) 倾斜层归位. 倾斜层归位.
2010年12月31日 31
纵横向分辨率分析
纵向分辨率分析:目的是得到各目的层的纵向分辨率
分辨地层的最小厚度即最小波长的四分之一定义为纵向分辨率。 根据各目的层的最大频率和地震波的层速度,纵向分辨率为:
v
其中 Vr Vint fmax
r
=
Vint
4 f max
为纵向分辨率; 为目的层的层速度; 为目的层的最大频率。
主要是勘探工区越来越复杂,基于传统的共 主要是勘探工区越来越复杂, 中心点(CMP)的勘探设计存在较大的问题。 中心点(CMP)的勘探设计存在较大的问题。
2010年12月31日
41
二维模型分析
2010年12月31日
42
二维模型分析
地质模型技术的提出: 地质模型技术的提出:
基于共反射点( CRP)的观测系统设计是解决复杂 基于共反射点( CRP) 个有效途径。 地质结构勘探的一 个有效途径。 建立地质模型,通过射线追踪, 建立地质模型,通过射线追踪,准确的获得目的 层反射点分布及接收排列的范围, 层反射点分布及接收排列的范围,指导观测系统设 计。
最大炮检距分析:速度精度分析
2010年12月31日
10
最大炮检距计算
最大炮检距分析:反射系数
反射系数随排列长度的变化而变化,当设计采集排列 时,需要考虑最佳接收的范围。采集的目的不同,接收的 范围是不一样的,比如在常规纵波勘探时,确保接收反射 能量稳定,因此根据当反射界面入射角小于临界角时,反 射系数比较稳定,来确定排列长度。因此根据反射系数的 变化可确定排列长度的大小。 地震波入射到波阻抗界面时,地震波将随入射角度变 化而发生不同程度的透射损失和反射损失,其变化可由佐 普瑞兹(Zoeppritz)方程求解得到。
2010年12月31日
13
最大炮检距计算
最大炮检距分析:干扰波
直达波的干扰距由以下反射波方程与直达波方程得到:
t
t
2
=
=
t0
x
2
+
x v
2
n
v
d
其中
t t0 x vn vd
为旅行时 为双程时 为炮检距 为叠加速度 为直达波速度
2010年12月31日
14
最大炮检距计算
最大炮检距分析:干扰波
2010年12月31日
∆x = λa
其中 ∆x λa θ Vint fmax
2
= V int
(2
∗
f
max
∗ sin θ )
为道距; 为有效波的最小视波长; 为目的层的倾角; 为上一层的地层速度; 为有效波的最大频率。
2010年12月31日
25
采集排列参数
• 最大炮检距计算 • 面元与道距 • 偏移孔径 • 纵横向分辨率 • 二维模型分析
rf
=
Z 2
∗
V int f mod
+
1 ∗ 16
V f
int
mod
2
其中 rf Z Vint fmod
2010年12月31日
为菲涅耳带半径; 为目的层深度; 为目的层处的层速度; 为有效波的主频。
29
偏移孔径
2010年12月31日
30
采集排列参数
• 最大炮检距计算 • 面元与道距 • 偏移孔径 • 纵横向分辨率 • 二维模型分析
2010年12月31日 4
采集排列参数
• 最大炮检距计算
• 动校拉伸 • 速度精度分析 • 反射系数 • 干扰波 • 视波长 • 多次波分析
2010年12月31日 5
最大炮检距计算
最大炮检距分析:动校拉伸
资料处理时,动校正使波形发生畸变,尤其在大 偏移距处,因此设计排列长度时要考虑浅层、中层有 效波动校拉伸情况,要使有效波畸变限制在一定的范 围内。
2010年12月31日
33
纵横向分辨率分析
S1、 的平均层速度分别是:3308m/s 4009m/s m/s、 5380m/s m/s。 目的层 S1、S3 中、S3 的平均层速度分别是:3308m/s、4009m/s 和 5380m/s。 按分辨 15 米、20 米和 25 米的地层计算,需要采集到相应的主频率(Fm)、最小频率 米的地层计算,需要采集到相应的主频率(Fm)、 (Fm) Fmax)见下表 (Fmin)和最大频率 (Fmax)见下表: Fmin)和最大频率 (Fmax)见下表:
S1
20 25 15
S3 中
20 25 15
S3
20 25
2010年12月31日
34
纵横向分辨率分析
横向分辨率分析:目的是得到各目的层的横向分辨率
两个绕射点的距离若小于最高频率的一个空间波长,它们就不能分开, 即最高频率的一个空间波长定义为横向分辨率。根据各目的层的最大频率 和地震波的层速度,横向分辨率为:
2010年12月31日
37
纵横向分辨率分析
2010年12月31日
38
纵横向分辨率分析
2010年12月31日
39
采集排列参数
• 最大炮检距计算 • 面元与道距 • 偏移孔径 • 纵横向分辨率 • 二维模型分析
2010年12月31日 40
二维模型分析
基于模型的参数分析
地质模型技术的提出: 地质模型技术的提出:
hr =
其中 hr Vint fmax
v
int
f max
为横向分辨率; 为目的层的层速度; 为目的层的最大频率。
2010年12月31日
35
纵横向分辨率分析
两个绕射,横向分开30米 100周子波 两个绕射,横向分开30米, 100周子波. 周子波.
2010年12月31日
36
纵横向分辨率分析
两个同样相距30米的绕射 但子波频率50周 两个同样相距30米的绕射,但子波频率50周. 米的绕射,
面元与道距
面元: 决定面元的三条原则 三条原则
3)考虑横向分辨率,即每个优势频率的 波长至少取2个样点。 面元边长 = Vint/(2*fdom)
其中
fdom 为优势频率 Vint 为上一层的地层速度
2010年12月31日
24
面元与道距
道距:
道距必须满足空间采样条件,即道距小于最小 有效波的视波长的一半:
±
2t V sinθ t V sinθ )
±