爬山算法
爬山算法与模拟退火比较
爬山算法与模拟退火比较在计算机科学领域,寻找最优解是一项常见的任务。
爬山算法和模拟退火算法是两种常用的优化算法,本文将对这两种算法进行比较。
一、爬山算法爬山算法是一种局部搜索算法,常用于解决最优化问题。
它的基本思想是从当前解出发,沿着梯度方向不断地移动,直到达到一个局部最优解。
爬山算法具有以下特点:1. 简单直观:爬山算法的实现相对简单,容易理解和实现。
2. 局部搜索:由于爬山算法只关注当前解的邻域,并不会全局搜索解空间,因此容易陷入局部最优解。
3. 容易受到初始解的影响:由于算法在初始解附近进行局部搜索,因此初始解的选择会直接影响搜索结果。
4. 高计算效率:爬山算法通过不断地调整当前解,找到更优的解。
由于只需计算当前解的邻域,所以计算效率较高。
二、模拟退火算法模拟退火算法是一种全局优化算法,它通过模拟固体退火的过程来进行搜索。
模拟退火算法具有以下特点:1. 全局搜索:模拟退火算法通过接受劣解的概率来跳出局部最优解,从而有机会搜索到全局最优解。
2. 逐步降温:模拟退火算法在搜索过程中逐渐减小退火温度,降低随机性,以便更好地接受优解。
3. 较复杂的参数设置:模拟退火算法需要合理地设置参数,如初始温度、退火速率等,而且不同问题可能需要不同的参数配置。
4. 高计算复杂度:由于模拟退火算法涉及到接受劣解的概率计算和随机跳转,因此其计算复杂度较高。
三、比较分析1. 搜索范围:- 爬山算法只在当前解的邻域内进行搜索,易陷入局部最优解。
- 模拟退火算法可以全局搜索,有机会找到全局最优解。
2. 算法复杂度:- 爬山算法的计算复杂度较低,因为它只需计算当前解的邻域。
- 模拟退火算法的计算复杂度较高,因为它需要多次重复计算接受劣解的概率和随机跳转。
3. 对初始解的依赖:- 爬山算法对初始解的依赖较大,不同的初始解可能导致不同的搜索结果。
- 模拟退火算法对初始解不敏感,因为算法会通过温度的逐渐降低逐渐摆脱初始解的影响。
爬山算法原理

爬山算法原理
爬山算法(Hill Climbing Algorithm)是一种基于启发式搜索
的算法,其基本思想是从一个随机解开始,朝着当前方向上的最好的
解逐步迭代,直到达到局部最优解。
1. 步骤一:随机生成初始解
首先,需要随机生成一个初始解作为起点,这个初始解可以是随机产
生的或者是根据经验得到的合理解。
该解经过一些变换后可达到近似
的最优解。
2. 步骤二:选择邻域
在该初始解的基础上,需要选择一个搜索邻域。
邻域是指与当前解相
邻的一组解的集合,类似于图中该节点周围的节点。
邻域的选择对算
法的性能有很大影响,因此需要根据实际问题情况,选择合适的邻域。
3. 步骤三:评估邻居
接着,需要对当前解的邻居进行评估,并选择其中最好的邻居。
评估
的方式一般是根据问题的评价函数,计算出各个邻居的解的质量,然
后通过比较得出最优的邻居。
4. 步骤四:比较邻居与当前解
将最优的邻居与当前解进行比较,判断是否找到了一个更优的解。
如
果是,则将该邻居作为新的当前解,并进一步重新搜索;否则,算法
终止,输出当前解。
5. 步骤五:迭代搜索
如此循环迭代,每次选择分数最高的解作为当前解,继续进行搜索。
这个过程一直进行下去,直至无法找到比当前解更优的解。
总而言之,爬山算法的优缺点都比较明显,虽然简单易实现,但
容易陷入局部最优解而无法找到全局最优解。
因此,在实际应用中需
要根据具体问题情况进行调整和改进,比如采用模拟退火、遗传算法
等来克服其缺陷。
模拟退火算法的通俗解释
一. 爬山算法( Hill Climbing )' b2 m3 p" g. ]! u9 a* }2 ~' o% p$ l1 [8 n. D, q0 |" C介绍模拟退火前,先介绍爬山算法。
爬山算法是一种简单的贪心搜索算法,该算法每次从当前解的临近解空间中选择一个最优解作为当前解,直到达到一个局部最优解。
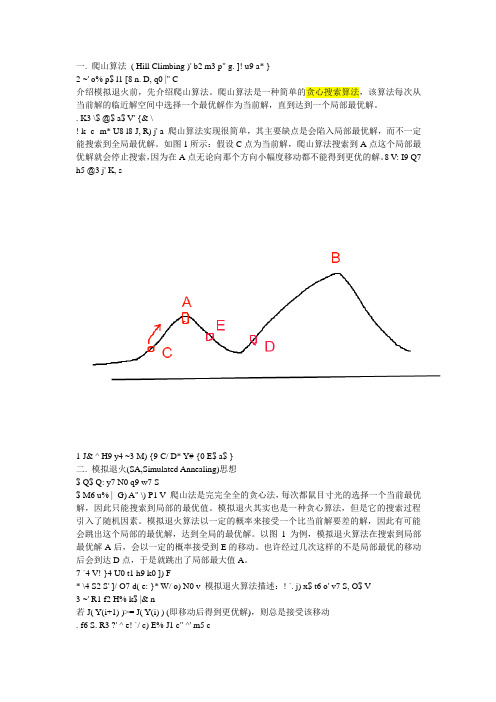
. K3 \$ @$ a$ V' {& \! k- c- m* U8 l8 J, R) j' a 爬山算法实现很简单,其主要缺点是会陷入局部最优解,而不一定能搜索到全局最优解。
如图1所示:假设C点为当前解,爬山算法搜索到A点这个局部最优解就会停止搜索,因为在A点无论向那个方向小幅度移动都不能得到更优的解。
8 V: I9 Q7 h5 @3 j' K, s1 J& ^ H9 y4 ~3 M) {9 C/ D* Y# {0 E$ a$ }二. 模拟退火(SA,Simulated Annealing)思想$ Q$ Q: y7 N0 q9 w7 S$ M6 u% |- G) A" \) P1 V 爬山法是完完全全的贪心法,每次都鼠目寸光的选择一个当前最优解,因此只能搜索到局部的最优值。
模拟退火其实也是一种贪心算法,但是它的搜索过程引入了随机因素。
模拟退火算法以一定的概率来接受一个比当前解要差的解,因此有可能会跳出这个局部的最优解,达到全局的最优解。
以图1为例,模拟退火算法在搜索到局部最优解A后,会以一定的概率接受到E的移动。
也许经过几次这样的不是局部最优的移动后会到达D点,于是就跳出了局部最大值A。
7 `4 V! }4 U0 t1 h9 k0 ]) F* \4 S2 S' ]/ O7 d( e: }* W/ o) N0 v 模拟退火算法描述:! `. j) x$ t6 o' v7 S, O$ V3 ~' R1 f2 H% k$ |& n若J( Y(i+1) )>= J( Y(i) ) (即移动后得到更优解),则总是接受该移动. f6 S. R3 ?' ^ e! `/ c) E% J1 c" ^' m5 c若J( Y(i+1) )< J( Y(i) ) (即移动后的解比当前解要差),则以一定的概率接受移动,而且这个概率随着时间推移逐渐降低(逐渐降低才能趋向稳定)% }1 M# [8 }" Q* R+ ~7 O6 N8 W( L8 N8 k这里的“一定的概率”的计算参考了金属冶炼的退火过程,这也是模拟退火算法名称的由来。
爬山算法应用生活实例
爬山算法应用生活实例
爬山算法是一种简单的贪心搜索算法,该算法每次从当前位置的临近空间中选择一个最优解作为当前解,直到达到一个局部最优解。
爬山算法可以类比成一个有失忆的人在浓雾中爬山。
这里就揭示了爬山算法的两个问题:失忆和浓雾。
失忆:就是说这个人不记得他去过什么地方,他只记得他现在所处的位置,以及周边的情况(因为有浓雾,所以他只能看到最近的周边的情况)。
所以说他在任何时候只存储一个当前的状态,之前的所有的状态全部不记得了。
那么我们就可以看出爬山算法非常依赖于这个初始状态(如果初始状态距离全局最值点很近的话,是更容易搜索到全局最值点的)。
浓雾:当他走到一个局部最值点时,因为他看见远处是否还有更大的最值点,所以就把当前这个局部最值点返回给你(爬山算法的返回是返回一个状态而不是一个路径,这个状态就是一个局部最值点)。
爬山算法的优点是避免遍历,采用启发式搜索策略,效率更高。
缺点是因为不是全面搜索,所以结果可能只是局部最优解,而不是全局最优解。
25个经典的元启发式算法 -回复
25个经典的元启发式算法-回复元启发式算法是一种用于解决优化问题的算法,它通过模拟自然进化过程或其他自然现象的规律,逐步寻找最优解。
这些算法是基于一系列的准则或原则,通过迭代、测试和改进来生成解决方案。
在本文中,我们将介绍25个经典的元启发式算法,并逐步解释它们的主题及其运作原理。
1. 爬山算法(Hill Climbing):爬山算法采用贪心策略,每次移动到当前状态的最优解。
然而,由于只考虑局部最优解,它很容易陷入局部最优解的陷阱。
2. 模拟退火算法(Simulated Annealing):模拟退火算法通过模拟固体退火过程,接受较差解决方案以避免陷入局部最优解。
它以一定的概率接受较差的解决方案,并逐渐降低概率。
3. 遗传算法(Genetic Algorithm):遗传算法模拟自然选择和遗传机制,通过逐代进化来优化解决方案。
它使用交叉和变异操作来产生下一代解决方案,并根据适应度评估函数进行选择。
4. 粒子群优化算法(Particle Swarm Optimization):粒子群优化算法模拟鸟群或鱼群的行为,通过群体合作来搜索最优解。
每个粒子通过学习自己和邻居的经验来更新其位置和速度。
5. 蚁群算法(Ant Colony Optimization):蚁群算法模拟蚂蚁在搜索食物过程中释放信息素的行为。
蚂蚁根据信息素浓度和距离选择路径,并通过更新信息素浓度来引导其他蚂蚁的选择。
6. 人工鱼群算法(Artificial Fish Swarm Algorithm):人工鱼群算法模拟鱼群的行为,通过觅食和追逐行为来搜索最优解。
每条鱼根据个体行为和群体行为来更新其位置和速度。
7. 免疫算法(Immune Algorithm):免疫算法模拟免疫系统的信息处理和适应能力。
它通过生成、选择和演化抗体来解决优化问题,以识别和消除有害因素。
8. 蜂群算法(Bee Algorithm):蜂群算法模拟蜜蜂的行为,通过在食物源附近搜索和招募蜜蜂来优化解决方案。
爬山算法 python
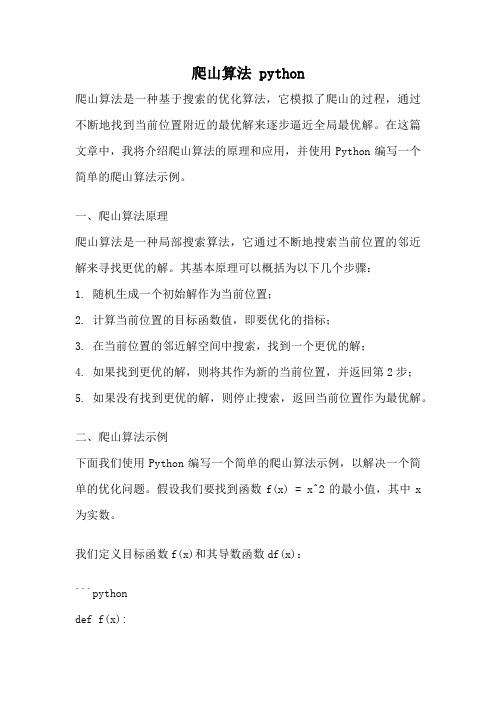
爬山算法 python爬山算法是一种基于搜索的优化算法,它模拟了爬山的过程,通过不断地找到当前位置附近的最优解来逐步逼近全局最优解。
在这篇文章中,我将介绍爬山算法的原理和应用,并使用Python编写一个简单的爬山算法示例。
一、爬山算法原理爬山算法是一种局部搜索算法,它通过不断地搜索当前位置的邻近解来寻找更优的解。
其基本原理可以概括为以下几个步骤:1. 随机生成一个初始解作为当前位置;2. 计算当前位置的目标函数值,即要优化的指标;3. 在当前位置的邻近解空间中搜索,找到一个更优的解;4. 如果找到更优的解,则将其作为新的当前位置,并返回第2步;5. 如果没有找到更优的解,则停止搜索,返回当前位置作为最优解。
二、爬山算法示例下面我们使用Python编写一个简单的爬山算法示例,以解决一个简单的优化问题。
假设我们要找到函数f(x) = x^2的最小值,其中x 为实数。
我们定义目标函数f(x)和其导数函数df(x):```pythondef f(x):return x**2def df(x):return 2*x```接下来,我们实现爬山算法的主要部分:```pythondef hill_climbing(start_x, step_size, max_iterations): current_x = start_xbest_x = current_xfor i in range(max_iterations):current_fx = f(current_x)neighbor_x = current_x + step_sizeneighbor_fx = f(neighbor_x)if neighbor_fx < current_fx:current_x = neighbor_xif f(current_x) < f(best_x):best_x = current_xreturn best_x```在主程序中,我们可以调用上述函数来求解最小值:```pythonstart_x = 5step_size = 0.1max_iterations = 100best_x = hill_climbing(start_x, step_size, max_iterations) best_fx = f(best_x)print("最优解为:", best_x)print("最小值为:", best_fx)```三、爬山算法的应用领域爬山算法虽然简单,但在很多实际问题中都有广泛的应用。
爬山比大小规则
爬山比大小规则
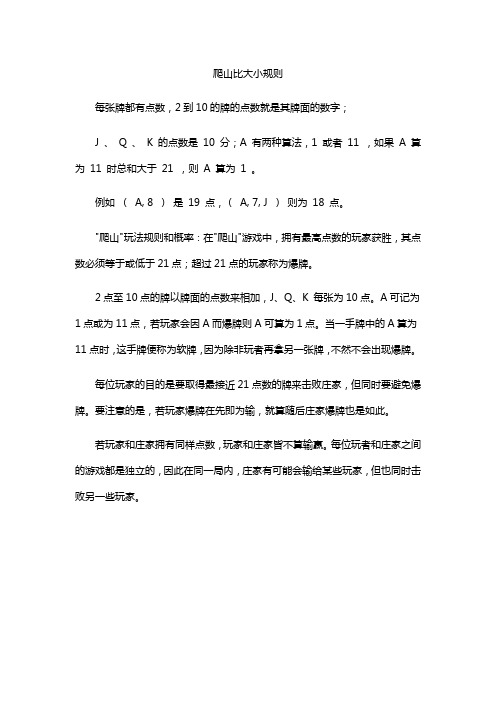
每张牌都有点数,2到10的牌的点数就是其牌面的数字;
J 、Q 、K 的点数是10 分;A 有两种算法,1 或者11 ,如果A 算为11 时总和大于21 ,则A 算为1 。
例如(A, 8 )是19 点,(A, 7, J )则为18 点。
"爬山"玩法规则和概率:在"爬山"游戏中,拥有最高点数的玩家获胜,其点数必须等于或低于21点;超过21点的玩家称为爆牌。
2点至10点的牌以牌面的点数来相加,J、Q、K 每张为10点。
A可记为1点或为11点,若玩家会因A而爆牌则A可算为1点。
当一手牌中的A算为11点时,这手牌便称为软牌,因为除非玩者再拿另一张牌,不然不会出现爆牌。
每位玩家的目的是要取得最接近21点数的牌来击败庄家,但同时要避免爆牌。
要注意的是,若玩家爆牌在先即为输,就算随后庄家爆牌也是如此。
若玩家和庄家拥有同样点数,玩家和庄家皆不算输赢。
每位玩者和庄家之间的游戏都是独立的,因此在同一局内,庄家有可能会输给某些玩家,但也同时击败另一些玩家。
通俗解释爬山法模拟退火遗传算法贝叶斯算法

通俗解释爬山法模拟退火遗传算法贝叶斯算法
爬山法:
爬山法是一种简单的优化算法,用于寻找一个问题的局部最优解。
这个方法模拟了爬山的过程,从一个起点开始,每次选择一个相邻点,并沿着该方向移动,直到无法继续移动为止。
爬山法的基本思想是通过比较邻近点的目标函数值,选择一个比当前点更好的点,然后以这个点为新的起点,继续向更好的方向移动,直到找到一个不能被改进的局部最优解。
模拟退火:
遗传算法:
遗传算法是一种模拟自然进化过程的算法。
它通过模拟遗传操作,如选择、交叉和变异,以及适应度的评估,来逐代问题的解空间。
遗传算法的基本思想是通过不断的演化,将种群中较好的个体遗传下去,并通过选择和交叉操作来生成新的个体,以适应环境的变化并优化问题的解。
通过这种方式,遗传算法可以在一个大的解空间中找到问题的全局最优解。
贝叶斯算法:
贝叶斯算法是一种基于贝叶斯定理的统计推断方法。
它通过将先验知识和新的观察结果结合起来,更新问题的概率分布,从而得到最接近真实情况的后验概率分布。
贝叶斯算法的基本思想是根据已有的知识(先验概率)和新的观测数据(似然度)来推断参数的概率分布(后验概率)。
通过迭代的方式,不断更新后验概率分布,贝叶斯算法可以更好地利用已有的知识和新的观测数据,得到更准确的结果。
贝叶斯算法在概率推断、数据挖掘和机器学习等领域得到了广泛的应用。
以上是对爬山法、模拟退火、遗传算法和贝叶斯算法的通俗解释。
它们分别是解决不同类型问题的优化算法,通过模拟不同的自然过程和统计推断方法,以达到在复杂的解空间中找到问题最优解的目的。
爬山算法(HillClimbing)模拟退火(SA,SimulatedAnnealing)

爬⼭算法(HillClimbing)模拟退⽕(SA,SimulatedAnnealing)⼀. 爬⼭算法 ( Hill Climbing )爬⼭算法是⼀种简单的贪⼼搜索算法,该算法每次从当前解的临近解空间中选择⼀个最优解作为当前解,直到达到⼀个局部最优解。
爬⼭算法实现很简单,其主要缺点是会陷⼊局部最优解,⽽不⼀定能搜索到全局最优解。
假设C 点为当前解,爬⼭算法搜索到A点这个局部最优解就会停⽌搜索,因为在A点⽆论向那个⽅向⼩幅度移动都不能得到更优的解。
⼆. 模拟退⽕(SA,Simulated Annealing)思想在实际⽇常中,⼈们会经常遇到如下问题:在某个给定的定义域X内,求函数f(x)对应的最优值。
此处以最⼩值问题举例(最⼤值问题可以等价转化成最⼩值问题),形式化为:如果X是离散有限取值,那么可以通过穷取法获得问题的最优解;如果X连续,但f(x)是凸的,那可以通过梯度下降等⽅法获得最优解;如果X连续且f(x)⾮凸,虽说根据已有的近似求解法能够找到问题解,可解是否是最优的还有待考量,很多时候若初始值选择的不好,⾮常容易陷⼊局部最优值。
随着⽇常业务场景的复杂化,第三种问题经常遇见。
如何有效地避免局部最优的困扰?模拟退⽕算法应运⽽⽣。
其实模拟退⽕也算是启发式算法的⼀种,具体学习的是冶⾦学中⾦属加热-冷却的过程。
由S.Kirkpatrick, C.D.Gelatt和M.P.Vecchi在1983年所发明的,V.Čern在1985年也独⽴发明此演算法。
不过模拟退⽕算法到底是如何模拟⾦属退⽕的原理?主要是将热⼒学的理论套⽤到统计学上,将搜寻空间内每⼀点想像成空⽓内的分⼦;分⼦的能量,就是它本⾝的动能;⽽搜寻空间内的每⼀点,也像空⽓分⼦⼀样带有“能量”,以表⽰该点对命题的合适程度。
演算法先以搜寻空间内⼀个任意点作起始:每⼀步先选择⼀个“邻居”,然后再计算从现有位置到达“邻居”的概率。
若概率⼤于给定的阈值,则跳转到“邻居”;若概率较⼩,则停留在原位置不动。
梯度下降的爬山法法
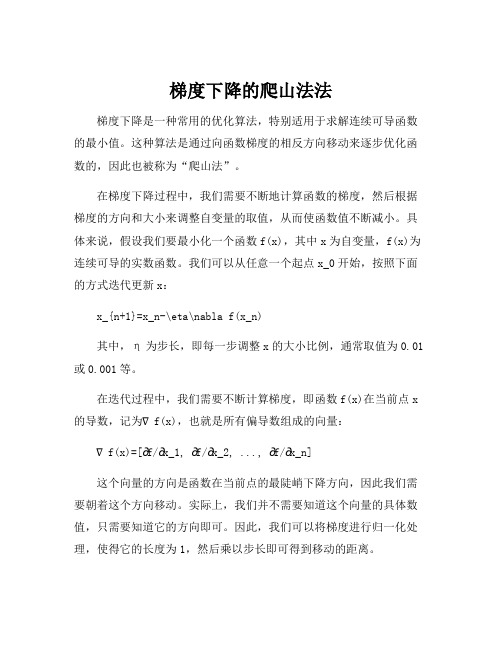
梯度下降的爬山法法梯度下降是一种常用的优化算法,特别适用于求解连续可导函数的最小值。
这种算法是通过向函数梯度的相反方向移动来逐步优化函数的,因此也被称为“爬山法”。
在梯度下降过程中,我们需要不断地计算函数的梯度,然后根据梯度的方向和大小来调整自变量的取值,从而使函数值不断减小。
具体来说,假设我们要最小化一个函数f(x),其中x为自变量,f(x)为连续可导的实数函数。
我们可以从任意一个起点x_0开始,按照下面的方式迭代更新x:x_{n+1}=x_n-\eta\nabla f(x_n)其中,η为步长,即每一步调整x的大小比例,通常取值为0.01或0.001等。
在迭代过程中,我们需要不断计算梯度,即函数f(x)在当前点x 的导数,记为∇f(x),也就是所有偏导数组成的向量:∇f(x)=[∂f/∂x_1, ∂f/∂x_2, ..., ∂f/∂x_n]这个向量的方向是函数在当前点的最陡峭下降方向,因此我们需要朝着这个方向移动。
实际上,我们并不需要知道这个向量的具体数值,只需要知道它的方向即可。
因此,我们可以将梯度进行归一化处理,使得它的长度为1,然后乘以步长即可得到移动的距离。
梯度下降算法的收敛速度和最终效果都与步长和起始点的选择有关。
选择过大的步长可能导致算法发散,选择过小的步长则会使得算法收敛缓慢。
起始点的选择也很重要,因为不同的起始点可能会收敛到不同的局部最小值,而不是全局最小值。
因此,在使用梯度下降算法时,我们需要通过试错法来确定最佳的步长和起始点,同时还要对函数的形式和目标进行充分的理解和分析,以便确定最优的策略。
总的来说,梯度下降算法是一种去求解函数最小值的有效方法,适用于多种应用领域,如机器学习、数据挖掘、图像处理等。
通过不断地迭代和优化,我们可以找到函数的最小值,并获得更好的性能和准确度。
因此,对于学习和掌握此算法的人来说,熟练掌握梯度下降的原理和实现方法是非常有必要的。
上山下山求路程的数学问题
上山下山求路程的数学问题
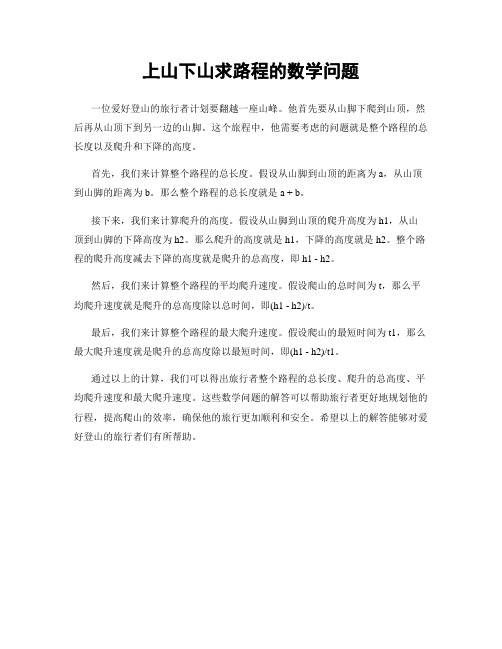
一位爱好登山的旅行者计划要翻越一座山峰。
他首先要从山脚下爬到山顶,然后再从山顶下到另一边的山脚。
这个旅程中,他需要考虑的问题就是整个路程的总长度以及爬升和下降的高度。
首先,我们来计算整个路程的总长度。
假设从山脚到山顶的距离为a,从山顶到山脚的距离为b。
那么整个路程的总长度就是a + b。
接下来,我们来计算爬升的高度。
假设从山脚到山顶的爬升高度为h1,从山顶到山脚的下降高度为h2。
那么爬升的高度就是h1,下降的高度就是h2。
整个路程的爬升高度减去下降的高度就是爬升的总高度,即h1 - h2。
然后,我们来计算整个路程的平均爬升速度。
假设爬山的总时间为t,那么平均爬升速度就是爬升的总高度除以总时间,即(h1 - h2)/t。
最后,我们来计算整个路程的最大爬升速度。
假设爬山的最短时间为t1,那么最大爬升速度就是爬升的总高度除以最短时间,即(h1 - h2)/t1。
通过以上的计算,我们可以得出旅行者整个路程的总长度、爬升的总高度、平均爬升速度和最大爬升速度。
这些数学问题的解答可以帮助旅行者更好地规划他的行程,提高爬山的效率,确保他的旅行更加顺利和安全。
希望以上的解答能够对爱好登山的旅行者们有所帮助。
最陡爬山算法范文

最陡爬山算法范文最陡爬山算法(steepest ascent hill climbing algorithm)是一种局部算法,用于求解优化问题。
它的核心思想是从当前解的邻域中选择一个具有最高目标函数值的解作为下一个点,以此不断迭代,直到找到最优解或无法继续改进为止。
下面将详细介绍最陡爬山算法的原理、步骤以及优缺点。
最陡爬山算法的原理非常简单明了,它通过不断迭代当前解的邻域,选择一个具有最高目标函数值的解作为下一个点。
具体而言,该算法从一个初始解开始,计算当前解的所有邻居解,并计算与当前解相应的目标函数值。
然后,从这些邻居解中选择一个具有最高目标函数值的解,将其作为新的当前解,并继续重复上述步骤,直到找到最优解或无法继续改进。
1.初始化:选择一个初始解作为当前解。
2.迭代:计算当前解的所有邻居解,并计算与当前解相应的目标函数值。
3.选择:从这些邻居解中选择一个具有最高目标函数值的解作为新的当前解。
4.改进:判断新的当前解是否优于之前的解,如果是,则继续迭代;否则,算法终止。
5.终止:找到最优解或无法继续改进。
1.简单:算法原理简单,易于理解和实现。
2.高效:算法迭代速度快,能够在短时间内找到局部最优解。
3.适用范围广:可以应用于不同类型的优化问题。
然而,最陡爬山算法也存在以下缺点:1.局部最优解:最陡爬山算法可能陷入局部最优解而无法达到全局最优解。
2.糟糕的收敛性:算法可能在局部最优解附近震荡,无法继续改进。
3.依赖初始解:算法的性能高度依赖于初始解的选择。
4.缺乏多样性:算法只关注当前解的邻居,可能无法探索更远的解空间。
为了克服最陡爬山算法的局限性,可以采取以下改进措施:1.模拟退火算法:通过引入随机因素,允许跳出局部最优解,更好地探索解空间。
2.遗传算法:使用进化策略,维护一组种群,通过交叉、变异等操作进行优劣解的选择和改进。
3.禁忌:引入记忆机制,禁止一些解,以避免陷入局部最优解。
总结起来,最陡爬山算法是一种简单且高效的局部算法,适用于求解优化问题。
stochastic hillclimbing method

stochastic hillclimbing method什么是随机爬山算法?随机爬山算法是一种优化算法,其目标是找到输入数据的最佳解决方案。
该算法旨在在解空间中使用所谓的“爬山”策略,即选择一个当前解决方案的邻居,并比较邻居的结果与当前结果。
如果邻居的结果更好,则将当前解决方案更改为邻居,并重复此过程直到找到最佳解决方案。
但是,该算法总是选择邻居方案中最好的解决方案是会导致陷入局部最优解的风险,因此随机化被应用于该算法以避免这种情况,同时仍然保持搜索的高效性。
随机爬山算法的基本原理是什么?基本的随机爬山算法是相当简单的。
它由以下步骤组成:1. 随机生成一个“起点”解决方案来开始搜索。
2. 计算当前解决方案的结果。
3. 生成当前解决方案的所有邻居解决方案。
4. 在邻居解决方案中随机选择一个解决方案,并计算其结果。
5. 如果该邻居解决方案更好,则将当前解决方案更改为邻居解决方案。
6. 重复步骤2-5直到达到某种终止条件(如达到最大迭代次数,或结果超过特定阈值)。
随机化如何帮助避免局部最优解?由于随机爬山算法可能导致陷入局部最优解,可以通过引入随机性来避免这种情况。
随机爬山算法中的随机化可以分为以下两种情况:1.在邻居解决方案中随机选择一个解决方案:在当前解决方案的邻居中选择最好的解决方案可能会导致局部最优解。
因此,引入随机化,选择邻居中的随机解决方案,而不是最好的,可以帮助避免这种情况。
2.随机化初始解决方案:初始解决方案对结果影响很大,因此引入随机性可以帮助算法更好地探索解空间。
通过多次搜索(比如10次),每次使用不同的随机初始解决方案并保留最好的结果,可以大大提高随机爬山算法的性能。
随机爬山算法的优点和缺点是什么?随机爬山算法的优点在于其简单性和高效性。
该算法具有良好的可扩展性和灵活性,适用于各种问题。
另外,引入随机性可以帮助避免局部最优解,并且可以通过反复搜索并保留最佳结果来提高性能。
然而,随机爬山算法也有一些明显的缺点。
爬山算法——精选推荐
爬⼭算法⽬录爬⼭算法⼀种启发式算法。
可以求得局部最优值(极⼤值)。
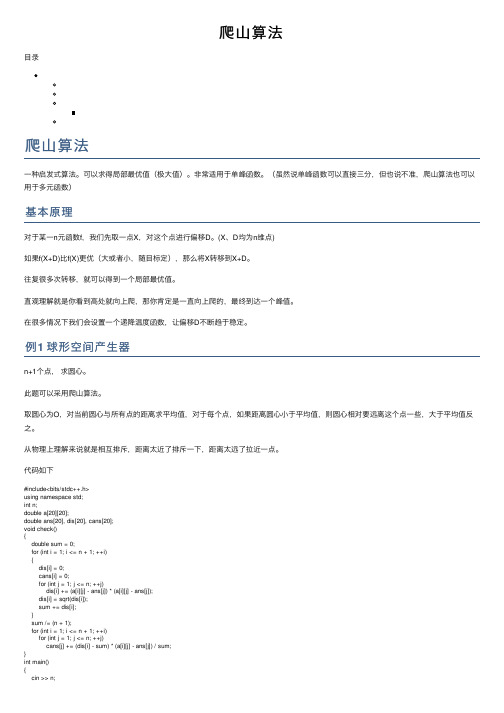
⾮常适⽤于单峰函数。
(虽然说单峰函数可以直接三分,但也说不准,爬⼭算法也可以⽤于多元函数)基本原理对于某⼀n元函数f,我们先取⼀点X,对这个点进⾏偏移D。
(X、D均为n维点)如果f(X+D)⽐f(X)更优(⼤或者⼩,随⽬标定),那么将X转移到X+D。
往复很多次转移,就可以得到⼀个局部最优值。
直观理解就是你看到⾼处就向上爬,那你肯定是⼀直向上爬的,最终到达⼀个峰值。
在很多情况下我们会设置⼀个递降温度函数,让偏移D不断趋于稳定。
例1 球形空间产⽣器n+1个点,求圆⼼。
此题可以采⽤爬⼭算法。
取圆⼼为O,对当前圆⼼与所有点的距离求平均值,对于每个点,如果距离圆⼼⼩于平均值,则圆⼼相对要远离这个点⼀些,⼤于平均值反之。
从物理上理解来说就是相互排斥,距离太近了排斥⼀下,距离太远了拉近⼀点。
代码如下#include<bits/stdc++.h>using namespace std;int n;double a[20][20];double ans[20], dis[20], cans[20];void check(){double sum = 0;for (int i = 1; i <= n + 1; ++i){dis[i] = 0;cans[i] = 0;for (int j = 1; j <= n; ++j)dis[i] += (a[i][j] - ans[j]) * (a[i][j] - ans[j]);dis[i] = sqrt(dis[i]);sum += dis[i];}sum /= (n + 1);for (int i = 1; i <= n + 1; ++i)for (int j = 1; j <= n; ++j)cans[j] += (dis[i] - sum) * (a[i][j] - ans[j]) / sum;}int main(){cin >> n;for (int i = 1; i <= n + 1; ++i)for (int j = 1; j <= n; ++j){cin >> a[i][j];ans[j] += a[i][j];}for (int i = 1; i <= n; ++i)ans[i] = ans[i] / (n + 1);for (double T = 3; T >= 1e-6; T *= 0.99995){check();for (int i = 1; i <= n; ++i)ans[i] += cans[i] * T;}for (int i = 1; i <= n; ++i)printf("%.3f ", ans[i]);return 0;}此题实际上是经典的⾼斯消元。
爬山算法

爬山算法一.实验目的通过上机实现爬山算法,了解并掌握爬山搜索算法的内涵。
通过动态演示搜索全过程深刻理解该算法。
二. 实验内容与要求用爬山法求f(x,y)=1/(x 2+y 2+2)的最大值,设计出具体的程序,使之能够动态演示爬山搜索过程。
三.参考算法1. 给定初值x (0)及精度ε,若||▽f(x (0))||2≤ε则x (0)即为近似极小值 2222121||||,),,()(n T nx x x X x f x f X f +++=∂∂∂∂=∇ 2.若||▽f(x (0))||2>ε,用适当步长0λ按下式计算 )()0(0)0()1(X f X X ∇-=λ3.一般,若||▽f(x (k))||2≤ε,则x (k)为近似极小值,否则用适当步长k λ确定下一个近似值,直到满足精度为止。
)()()()1(k k k k X f X X ∇-=+λ四.源代码import java.awt.*;import java.awt.event.*;import javax.swing.*;public class hill{/*** Creates a new instance of <code>Newton</code>.*/public hill() {}/*** @param args the command line arguments*/public static void main(String[] arg){new newFrame().init();}}class newFrame extends JFrame{public void init(){MyPanel hello=new MyPanel();getContentPane().add(hello);hello.thread.start();//以下代码设置JFrame窗体的外观setSize(400,400);setLocation(200,200);setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);setVisible(true);}}class MyPanel extends JPanel implements Runnable{Thread thread;double xpoint[],ypoint[];double z,step=0.5,e=0.00001;double x=-3.0,y=-3.0;int hh=0,k=1;public MyPanel(){xpoint=new double[145];ypoint=new double[145];setSize(500, 500);thread=new Thread(this);}double f(double x,double y){return(1.0/(x*x+y*y+2));}double fx(double x,double y){return(-2.0*x/((x*x+y*y+2)*(x*x+y*y+2)));}double fy(double x,double y){return(-2.0*y/((x*x+y*y+2)*(x*x+y*y+2)));}double fxy2(double x,double y){return((4*(x*x+y*y))/((x*x+y*y+2)*(x*x+y*y+2)*(x*x+y*y+2)*(x*x+y*y+2))); }public void run(){z=f(x,y);repaint();xpoint[0]=x;ypoint[0]=z;try{thread.sleep(500);}catch(InterruptedException e){}while(fxy2(x,y)>e){x = x + step * fx(x, y);y = y + step * fy(x, y);z = f(x,y);xpoint[k]=x;ypoint[k]=z;k++;repaint();try{thread.sleep(50);}catch(InterruptedException e){}}hh=1;repaint();}public void paintComponent(Graphics g){g.setColor(Color.white);g.clearRect(0, 0, 400, 440);//画坐标轴g.setColor(Color.red);g.drawLine(0, 300, 400, 300); //x轴g.drawLine(200, 400, 200, 0); //y轴g.translate(200,300);g.setColor(Color.blue);//g.drawLine((int)(x*60),-(int)(z*200),0,-(int)(z*200));g.fillOval((int)(x*60-2),-(int)(z*200+2),4,4);if(hh==1){for(int i=0;i<144;i++){g.drawLine((int)(xpoint[i]*60),-(int)(ypoint[i]*200),(int)(xpoint[i+1]*60),-(int)(ypoint[i+1]* 200));}g.setColor(Color.red);g.drawLine(0,0,0,-200);g.setColor(Color.black);g.drawString("发现极值:x="+x,-180,-280);g.drawString("y="+y,-180,-260);g.drawString("f(x,y)="+z,-180,-240);}}}五.运行结果截图。
爬山算法简介和Python实现实例
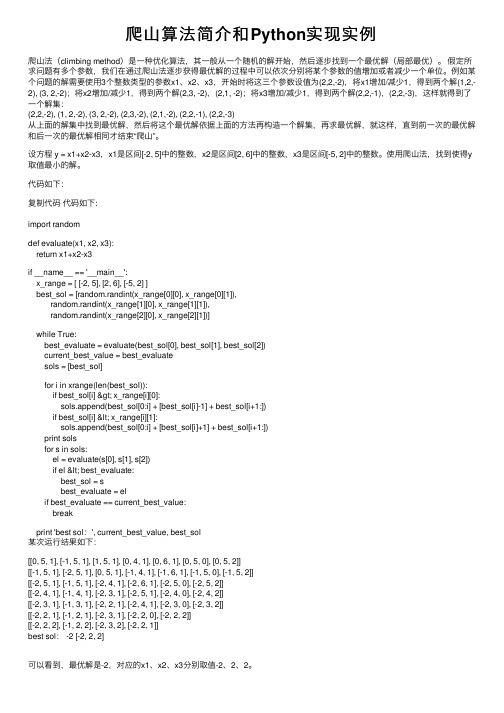
爬⼭算法简介和Python实现实例爬⼭法(climbing method)是⼀种优化算法,其⼀般从⼀个随机的解开始,然后逐步找到⼀个最优解(局部最优)。
假定所求问题有多个参数,我们在通过爬⼭法逐步获得最优解的过程中可以依次分别将某个参数的值增加或者减少⼀个单位。
例如某个问题的解需要使⽤3个整数类型的参数x1、x2、x3,开始时将这三个参数设值为(2,2,-2),将x1增加/减少1,得到两个解(1,2,-2), (3, 2,-2);将x2增加/减少1,得到两个解(2,3, -2),(2,1, -2);将x3增加/减少1,得到两个解(2,2,-1),(2,2,-3),这样就得到了⼀个解集:(2,2,-2), (1, 2,-2), (3, 2,-2), (2,3,-2), (2,1,-2), (2,2,-1), (2,2,-3)从上⾯的解集中找到最优解,然后将这个最优解依据上⾯的⽅法再构造⼀个解集,再求最优解,就这样,直到前⼀次的最优解和后⼀次的最优解相同才结束“爬⼭”。
设⽅程 y = x1+x2-x3,x1是区间[-2, 5]中的整数,x2是区间[2, 6]中的整数,x3是区间[-5, 2]中的整数。
使⽤爬⼭法,找到使得y 取值最⼩的解。
代码如下:复制代码代码如下:import randomdef evaluate(x1, x2, x3):return x1+x2-x3if __name__ == '__main__':x_range = [ [-2, 5], [2, 6], [-5, 2] ]best_sol = [random.randint(x_range[0][0], x_range[0][1]),random.randint(x_range[1][0], x_range[1][1]),random.randint(x_range[2][0], x_range[2][1])]while True:best_evaluate = evaluate(best_sol[0], best_sol[1], best_sol[2])current_best_value = best_evaluatesols = [best_sol]for i in xrange(len(best_sol)):if best_sol[i] > x_range[i][0]:sols.append(best_sol[0:i] + [best_sol[i]-1] + best_sol[i+1:])if best_sol[i] < x_range[i][1]:sols.append(best_sol[0:i] + [best_sol[i]+1] + best_sol[i+1:])print solsfor s in sols:el = evaluate(s[0], s[1], s[2])if el < best_evaluate:best_sol = sbest_evaluate = elif best_evaluate == current_best_value:breakprint 'best sol:', current_best_value, best_sol某次运⾏结果如下:[[0, 5, 1], [-1, 5, 1], [1, 5, 1], [0, 4, 1], [0, 6, 1], [0, 5, 0], [0, 5, 2]][[-1, 5, 1], [-2, 5, 1], [0, 5, 1], [-1, 4, 1], [-1, 6, 1], [-1, 5, 0], [-1, 5, 2]][[-2, 5, 1], [-1, 5, 1], [-2, 4, 1], [-2, 6, 1], [-2, 5, 0], [-2, 5, 2]][[-2, 4, 1], [-1, 4, 1], [-2, 3, 1], [-2, 5, 1], [-2, 4, 0], [-2, 4, 2]][[-2, 3, 1], [-1, 3, 1], [-2, 2, 1], [-2, 4, 1], [-2, 3, 0], [-2, 3, 2]][[-2, 2, 1], [-1, 2, 1], [-2, 3, 1], [-2, 2, 0], [-2, 2, 2]][[-2, 2, 2], [-1, 2, 2], [-2, 3, 2], [-2, 2, 1]]best sol: -2 [-2, 2, 2]可以看到,最优解是-2,对应的x1、x2、x3分别取值-2、2、2。
周末爬山算法题
题目描述:
小明和小红两人周末去爬山,小红先出发,中间休息了一段时间,然后按休息前的进度继续前进,最后比小明迟到达山顶。
设他们俩从山脚出发后所用的时间t(分钟)与所走的路程s(米)之间的函数关系为:
1. 根据图象小明登山的速度为______米/分,小红的登山速度为______米/分。
2. 求出bc段图象的函数关系式,并写出自变量的取值范围。
3. 小明到达山顶后,小红还有多少米到山顶?
解题思路:
1. 根据图象,我们可以求出小明和小红的登山速度。
小明的速度为s/t,小红的速度为s/t。
2. 对于bc段图象,我们可以根据速度和时间的关系,求出bc 段的函数关系式。
假设bc段的函数关系式为s=kt+b,其中k 为斜率,b为截距。
由于小红在休息后速度与之前相同,因此斜率k与ab段相同。
而截距b为休息时所走的路程。
3. 根据小明到达山顶的时间和速度,我们可以求出小明到达山顶时小红所走的路程。
然后根据bc段的函数关系式,求出小红
还需要走的路程。
示例解答:
1. 小明的登山速度为200米/分,小红的登山速度为100米/分。
2. bc段的函数关系式为s=100t+500,其中t的取值范围为20-30分钟。
3. 小明到达山顶时小红所走的路程为1500米,因此小红还需要走500米才能到达山顶。
数学建模上下山
数学建模上下山
1. 首选爬山算法
依次寻找该点X的邻近点中首次出现的比点X价值高的点,并将该点作为爬山的点(此处说的价值高,在该题中是指Z或f(x,y)值较大). 依次循环,直至该点的邻近点中不再有比其大的点. 我们成为该点就是山的顶点,又称为最优点.
2.最陡爬山算法
最陡爬山算法是在首选爬山算法上的一种改良,它规定每次选取邻近点价值最大的那个点作为爬上的点.
3.随机重新开始爬山算法
随机重新开始爬山算法是基于最陡爬山算法,其实就是加一个达到全局最优解的条件,如果满足该条件,就结束运算,反之则无限次重复运算最陡爬山算法(选取新的点重新开始)
4.模拟退火算法
模拟退火算法以一定概率选择比当前差的点,所以可以跳出局部最大。
在我的博客模拟退火算法的定义和应用中有详细介绍。
.。
stochastic hill climbing算法
随机爬山法(Stochastic Hill Climbing)是一种基于搜索算法的优化方法,旨在寻找问题的局部最优解。
这种方法通过引入随机性来避免陷入局部最优解,并具有较好的收敛性和计算效率。
随机爬山法的工作原理可以概括为以下几个步骤:
1. 初始化:随机选择一个初始解作为搜索起点。
2. 评估:计算当前解的适应度值,即目标函数的值。
3. 迭代:在每次迭代中,随机生成一个邻域解,并比较其与当前解的适应度值。
如果邻域解的适应度值更好,则接受该邻域解作为新的当前解。
否则,保持当前解不变。
4. 终止:当达到预设的迭代次数或找到满足要求的最优解时,停止迭代。
需要注意的是,随机爬山法的性能和效果在很大程度上取决于邻域结构和接受准则的选择。
因此,在实际应用中,需要根据问题的性质和特点选择合适的邻域结构和接受准则,以获得更好的优化效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
爬山算法
一.实验目的
通过上机实现爬山算法,了解并掌握爬山搜索算法的内涵。
通过动态演示搜索全过程深刻理解该算法。
二. 实验内容与要求
用爬山法求f(x,y)=1/(x 2+y 2+2)的最大值,设计出具体的程序,使之能够动态演示爬山搜索过程。
三.参考算法
1. 给定初值x (0)及精度ε,若||▽f(x (0))||2≤ε则x (0)
即为近似极小值 2222121||||,),,()(n T n
x x x X x f x f X f +++=∂∂∂∂=∇ 2.若||▽f(x (0)
)||2>ε,用适当步长0λ按下式计算 )()0(0)0()1(X f X X ∇-=λ
3.一般,若||▽f(x (k))||2≤ε,则x (k)
为近似极小值,否则用适当步长k λ确定下一个近似值,直到满足精度为止。
)()()()1(k k k k X f X X ∇-=+λ
四.源代码
import java.awt.*;
import java.awt.event.*;
import javax.swing.*;
public class hill
{
/**
* Creates a new instance of <code>Newton</code>.
*/
public hill() {
}
/**
* @param args the command line arguments
*/
public static void main(String[] arg)
{
new newFrame().init();
}
}
class newFrame extends JFrame
{
public void init()
{
MyPanel hello=new MyPanel();
getContentPane().add(hello);
hello.thread.start();
//以下代码设置JFrame窗体的外观
setSize(400,400);
setLocation(200,200);
setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
setVisible(true);
}
}
class MyPanel extends JPanel implements Runnable
{
Thread thread;
double xpoint[],ypoint[];
double z,step=0.5,e=0.00001;
double x=-3.0,y=-3.0;
int hh=0,k=1;
public MyPanel()
{
xpoint=new double[145];
ypoint=new double[145];
setSize(500, 500);
thread=new Thread(this);
}
double f(double x,double y)
{
return(1.0/(x*x+y*y+2));
}
double fx(double x,double y)
{
return(-2.0*x/((x*x+y*y+2)*(x*x+y*y+2)));
}
double fy(double x,double y)
{
return(-2.0*y/((x*x+y*y+2)*(x*x+y*y+2)));
}
double fxy2(double x,double y)
{
return((4*(x*x+y*y))/((x*x+y*y+2)*(x*x+y*y+2)*(x*x+y*y+2)*(x*x+y*y+2))); }
public void run()
{
z=f(x,y);
repaint();
xpoint[0]=x;
ypoint[0]=z;
try
{
thread.sleep(500);
}
catch(InterruptedException e)
{
}
while(fxy2(x,y)>e)
{
x = x + step * fx(x, y);
y = y + step * fy(x, y);
z = f(x,y);
xpoint[k]=x;
ypoint[k]=z;
k++;
repaint();
try
{
thread.sleep(50);
}
catch(InterruptedException e)
{
}
}
hh=1;
repaint();
}
public void paintComponent(Graphics g)
{
g.setColor(Color.white);
g.clearRect(0, 0, 400, 440);
//画坐标轴
g.setColor(Color.red);
g.drawLine(0, 300, 400, 300); //x轴
g.drawLine(200, 400, 200, 0); //y轴
g.translate(200,300);
g.setColor(Color.blue);
//g.drawLine((int)(x*60),-(int)(z*200),0,-(int)(z*200));
g.fillOval((int)(x*60-2),-(int)(z*200+2),4,4);
if(hh==1)
{
for(int i=0;i<144;i++)
{
g.drawLine((int)(xpoint[i]*60),-(int)(ypoint[i]*200),(int)(xpoint[i+1]*60),-(int)(ypoint[i+1]* 200));
}
g.setColor(Color.red);
g.drawLine(0,0,0,-200);
g.setColor(Color.black);
g.drawString("发现极值:x="+x,-180,-280);
g.drawString("y="+y,-180,-260);
g.drawString("f(x,y)="+z,-180,-240);
}
}
}
五.运行结果截图。