Discovery of a 270 Hz X-Ray Burst Oscillation in the X-Ray Dipper 4U 1916-053
外星文明猜想(英文作文)

Certainly! Here’s an essay exploring the conjectures about extraterrestrial civilizations, delving into the scientific, philosophical, and speculative aspects of the topic. Extraterrestrial Civilizations: The Great Beyond and Our Place in the CosmosThe universe, vast and ancient, stretches its arms across 93 billion light-years of observable space, containing billions of galaxies, each with billions of stars. Within this cosmic tapestry, the question of whether we are alone has captivated human minds for centuries. This essay explores the conjectures surrounding extraterrestrial civilizations, from the scientific theories to the speculative musings that fuel our imaginations.The Drake Equation: A Mathematical Framework for SpeculationAt the heart of the search for extraterrestrial intelligence (SETI) lies the Drake equation, formulated by astronomer Frank Drake in 1961. This mathematical framework attempts to estimate the number of active, communicative civilizations in the Milky Way galaxy. Variables include the rate of star formation, the fraction of stars with planetary systems, the number of planets capable of supporting life, the fraction of those planets where life actually emerges, the fraction of those life-bearing planets that develop intelligent life, the fraction of those that develop a civilization with technology, and the length of time such civilizations release detectable signals into space. While many of these variables remain unknown, the Drake equation serves as a tool for structured speculation and highlights the immense challenge in estimating the likelihood of extraterrestrial life.The Fermi Paradox: Where Are They?The Fermi paradox, named after physicist Enrico Fermi, poses a compelling question: Given the vastness of the universe and the high probability of habitable worlds, why have we not encountered any evidence of extraterrestrial civilizations? This paradox has led to numerous hypotheses. Perhaps civilizations tend to destroy themselves before achieving interstellar communication. Or, advanced civilizations might exist but choose to avoid contact with less developed species, adhering to a cosmic form of the “prime directive” seen in science fiction. Alternatively, the distances between stars could simply be too great for practical interstellar travel or communication, making detection exceedingly difficult.The Search for TechnosignaturesIn the quest for extraterrestrial intelligence, scientists have focused on detecting technosignatures—signs of technology that might indicate the presence of a civilization elsewhere in the universe. These include radio signals, laser pulses, or the dimming of stars due to megastructures like Dyson spheres. SETI projects, such as the Allen Telescope Array and Breakthrough Listen, scan the skies for anomalous signals that could be attributed to alien technology. While no definitive technosignatures have been found to date, the search continues, driven by advances in technology and a growing understanding of the cosmos.Astrobiology: Life Beyond EarthAstrobiology, the study of the origin, evolution, distribution, and future of life in the universe, offers insights into the conditions necessary for life. Research in astrobiology has revealed that life can thrive in extreme environments on Earth, suggesting that the conditions for life might be more widespread in the universe than previously thought. The discovery of exoplanets in the habitable zones of their stars, where liquid water can exist, increases the probability of finding environments suitable for life.Continued exploration of our solar system, particularly of Mars and the icy moons of Jupiter and Saturn, holds promise for uncovering signs of past or present microbial life. The Philosophical ImplicationsThe possibility of extraterrestrial civilizations raises profound philosophical questions about humanity’s place in the universe. Encountering another intelligence would force us to reevaluate our understanding of consciousness, culture, and ethics. It could lead to a new era of global unity as humanity comes together to face the challenges and opportunities of interstellar diplomacy. Conversely, it might also highlight our vulnerabilities and prompt introspection on our stewardship of the planet and our responsibilities as members of the cosmic community.Concluding ThoughtsWhile the existence of extraterrestrial civilizations remains a conjecture, the pursuit of answers has expanded our understanding of the universe and our place within it. The search for life beyond Earth is not just a scientific endeavor; it is a philosophical journey that challenges us to consider our origins, our destiny, and our role in the vast cosmic drama unfolding around us. Whether we find ourselves alone or part of a galactic community, the quest for knowledge about the universe and our place in it is one of humanity’s most enduring and inspiring pursuits.This essay explores various aspects of the conjectures surrounding extraterrestrial civilizations, from the scientific frameworks used to estimate their likelihood to the philosophical implications of their existence. If you have specific areas of interest within this broad topic, feel free to ask for further elaboration! If you have any further questions or need additional details on specific topics related to extraterrestrial life or astrobiology, please let me know!。
空间望远镜拍到银河系核心黑洞X射线爆发
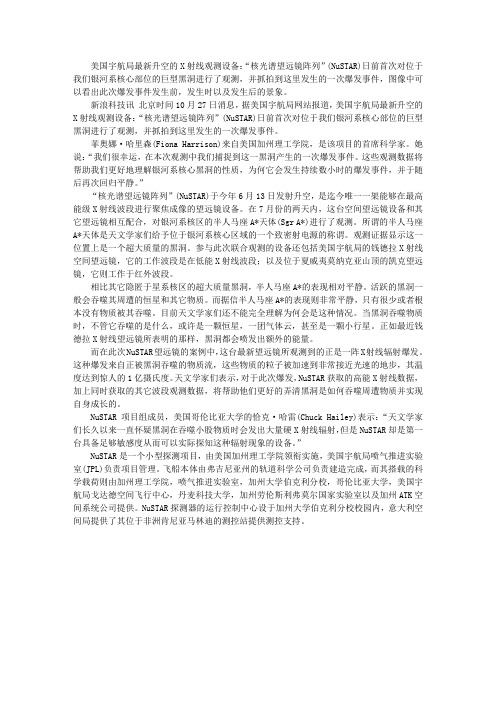
美国宇航局最新升空的X射线观测设备:“核光谱望远镜阵列”(NuSTAR)日前首次对位于我们银河系核心部位的巨型黑洞进行了观测,并抓拍到这里发生的一次爆发事件,图像中可以看出此次爆发事件发生前,发生时以及发生后的景象。
新浪科技讯北京时间10月27日消息,据美国宇航局网站报道,美国宇航局最新升空的X射线观测设备:“核光谱望远镜阵列”(NuSTAR)日前首次对位于我们银河系核心部位的巨型黑洞进行了观测,并抓拍到这里发生的一次爆发事件。
菲奥娜·哈里森(Fiona Harrison)来自美国加州理工学院,是该项目的首席科学家。
她说:“我们很幸运,在本次观测中我们捕捉到这一黑洞产生的一次爆发事件。
这些观测数据将帮助我们更好地理解银河系核心黑洞的性质,为何它会发生持续数小时的爆发事件,并于随后再次回归平静。
”“核光谱望远镜阵列”(NuSTAR)于今年6月13日发射升空,是迄今唯一一架能够在最高能级X射线波段进行聚焦成像的望远镜设备。
在7月份的两天内,这台空间望远镜设备和其它望远镜相互配合,对银河系核区的半人马座A*天体(Sgr A*)进行了观测。
所谓的半人马座A*天体是天文学家们给予位于银河系核心区域的一个致密射电源的称谓。
观测证据显示这一位置上是一个超大质量的黑洞。
参与此次联合观测的设备还包括美国宇航局的钱德拉X射线空间望远镜,它的工作波段是在低能X射线波段;以及位于夏威夷莫纳克亚山顶的凯克望远镜,它则工作于红外波段。
相比其它隐匿于星系核区的超大质量黑洞,半人马座A*的表现相对平静。
活跃的黑洞一般会吞噬其周遭的恒星和其它物质。
而据信半人马座A*的表现则非常平静,只有很少或者根本没有物质被其吞噬。
目前天文学家们还不能完全理解为何会是这种情况。
当黑洞吞噬物质时,不管它吞噬的是什么,或许是一颗恒星,一团气体云,甚至是一颗小行星。
正如最近钱德拉X射线望远镜所表明的那样,黑洞都会喷发出额外的能量。
而在此次NuSTAR望远镜的案例中,这台最新望远镜所观测到的正是一阵X射线辐射爆发。
HD IR Vari -Focal Bullet Network Camera Quick Star

HD IR Vari-Focal Bullet Network Camera Quick Start GuideVersion 1.0.0WelcomeThank you for purchasing our Network camera!This user’s manual is designed to be a reference tool for your system.Please read the following safeguard and warnings carefully before you use this series product!Please keep this user’s manual well for future reference!Important Safeguards and Warnings1.Electrical safetyAll installation and operation here should conform to your local electrical safety codes.Please check if the power supply is correct before operating the device.The power shall conform to the requirement in the SELV (Safety Extra Low Voltage) and the Limited power source is rated 12V DC, DC5V or AC24V in the IEC60950-1. (Power supply requirement is subject to the device label).Please install easy-to-use device for power off before installing wiring, which is for emergent power off when necessary.Please prevent the line cord from being trampled or pressed, especially the plug, power socket and the junction from the device.Note: Do not connect these two power supplying sources to the device at the same time; it may result in device damage!We assume no liability or responsibility for all the fires or electrical shock caused by improper handling or installation.We are not liable for any problems caused by unauthorized modification or attempted repair.2.EnvironmentPlease don’t aim the device at strong light (such as lighting, sunlight and so on) to focus; otherwise it may cause overexposure (It is not the device malfunction), which will affect the longevity of CCD or CMOS.Please transport, use and store the device within the range of allowed humidity and temperature. Please don’t keep the device in a place which is wet, dusty, extremely hot, and extremely cold and with strong electromagnetic radiation or unstable lighting.Please do not allow water and other liquid falling into the camera in case that the internal components are damaged.Please do not allow rain or damp to the indoor device in case fire or lightning may occur.Please keep the sound ventilation in case of heat accumulation.Please pack the device with standard factory packaging or material with same quality when transporting the device.Heavy stress, violent vibration or water splash are not allowed during transportation, storage and installation.3. Operation and Daily MaintenancePlease do not touch the heat dissipation component of the device directly in order to avoid scald.Please do not dismantle the device; there is no component which can be fixed by users themselves in the machine. It may cause water leakage or bad image for the device due to unprofessional dismantling. It is recommended to use the device with thunder proof device in order to improve thunder proof effect. The grounding holes of the product are recommended to be grounded to further enhance the reliability of the camera.Do not touch the CCD (CMOS) optic component directly. You can use the blower to clean the dust or dirt on the lens surface. Please use a dry cloth wetted by alcohol to wipe away the dust gently if it is necessary to clean.Always use the dry soft cloth to clean the device. If there is too much dust, please use the water to dilute the mild detergent first and then use it to clean the device. Finally use the dry cloth to clean the device. Don’t use volatile solvent like alcohol, benzene, thinner and etc or strong detergent with abrasiveness, otherwise it will damage the surface coating or reduce the working performance of the device.Dome cover is an optical device, please don’t touch or wipe cover surface directly during installation and use, please refer to the following methods to deal with once dirt is found:Stained with dirtUse oil-free soft brush or hair dries to remove it gently.Stained with grease or fingerprintUse soft cloth to wipe the water drop or oil gently to make it dry, then use oil-free cotton cloth or paper soaked with alcohol or detergent to wipe from the lens center to outward. It is ok to change the cloth and wipe several times if it is not clean enough.WarningPlease use the standard accessories provided by manufacturer and make sure the device is installed and fixed by professional engineers.Please prevent the device surface from the radiation of laser beam when using laser beam device.Please do not provide two or more power supply modes for the device, otherwise it may cause damage to the device.StatementPlease refer to the actual product for more details; the manual is just for reference.The manual will be regularly upgraded according to the product update; the upgraded content will be added in the manual without prior announcement.Please contact the supplier or customer service if there is any problem occurred when using the device. Please contact the customer service for the latest procedure and supplementary documentation.There may be deviation between the actual value of some data and the value provided in the manual due to the reasons such as the real environment is not stable and so on. Please refer to the company’s final explanation if there is any doubt or dispute.The company is not liable for any loss caused by the operation which is not followed by the manual. Note:Please refer to the disk for more details, check and download corresponding user’s manual and tool. Before installation, please open the package and check all the components are included.Contact your local retailer ASAP if something is broken in your package.Accessory Name AmountNetwork Camera Unit 1Quick Start Guide 1Installation Accessory Bag 1CD 1Table of Contents1Framework (1)1.1Device External Cable (1)1.2Framework and Dimension (2)2Device Installation (3)2.1Install the Device (3)2.2SD Card Installation (5)3Network Configuration (6)3.1Modify IP Address (6)3.2Login WEB Interface (7)1Framework1.1Device External CableYou can refer to the following figure for device external cable information. See Figure 1-1.Figure 1-1Please refer to the following sheet for detailed information.SN Port Port Name Connection Note1 DC 12V Power inputport- Power port. Input DC 12V.2 LAN Network port EthernetportConnect to standard Ethernet cable.1.2Framework and DimensionPlease refer to the following figures for dimension information according to the actual model. The unit is mm. See Figure 1-2 and Figure 1-3.Figure 1-2 Dimension illustration 1Figure 1-3 Dimension illustration 22Device Installation2.1Install the DeviceNote:Please make sure the installation surface can min support the 3X weight of the camera and the bracket.Step 1Open accessories bag, take out installation position map and stick it to designated surface where you will install the device (wall or ceiling).Step 2Dig a hole according to position of hole on installation position map.Step 3Open accessories bag, take out expansion bolts and insert them into the holes you just dug. Step 4Open accessories bag and take out the self-tapping screws. Aim the expansion bolts to the installation holes on the device pedestal and fix the device on the installation surface (wall orceiling) with self-tapping screws.Step 5Plug external wiring of the device properly.Figure 2-1Figure 2-2Step 6Use inner hex screwdriver to loosen adjusting screw shown in Figure 2-2.Step 7Adjust the device in all possible directions, and set its monitoring direction.Step 8Use inner hex screwdriver to tighten the adjusting screws.Note:Some models don’t have lower cover, which don’t support the following steps.Figure 2-3Step 9Screw out the locking screw (shown in Figure 2-3) by screwdriver and take off the lower cover. Step 10Adjust the lens focus lever and set its monitoring direction more accurately by external focus. Step 11Use screwdriver to tighten the locking screws.2.2SD Card InstallationNote:Some models don’t support Micro SD card function, which can’t be applied to the following chapter.Please cut off the device power and turn off the device before installing Micro SD card.Step 1Find the Micro SD card slot in the location shown in Figure 2-3.Step 2Adjust the direction of Micro SD card and insert it into the card slot.Step 3Install the lower cover and complete installation.3 Network ConfigurationThe IP address of all the cameras is the same when leaving factory (default IP192.168.1.108), in order to make the camera get access to the network smoothly, please plan the useable IP segment reasonably according to the actual network environment.3.1 Modify IP AddressIP address can be acquired and modified through quick configuration tool for the cameras which are accessed via wired network, it needs to connect wired network to configure wireless parameters before using wireless network cameras. In this chapter, it will introduce the approach of modifying IP address via “Quick Configuration Tool”; also you can modify the IP address in the network parameters of the WEB interface, please refer to the document in the disk << WEB Operation Manual>> for more details.Note:Currently the quick configuration tool only supports the cameras which apply to the same network segment with computer IP address.Step 1 Double click the “ConfigT ools.exe” and open the quick configuration tool.Step 2 Double click the device to be configured, the system will pop out the “Login” dialog box.Enter the IP address, user name, password and port number of the camera, and click “Confirm”.Note:The default user name and password are admin and admin respectively, the default of port is 37777. See Figure 3-1 for more details.Figure 3-1Step 3 Modify the camera IP address on the “Net” interface, click “Save” to finish modification. See Figure 3-2 for more details.Figure 3-23.2 Login WEB InterfaceNote:Different devices may have different WEB interfaces, the figures below are just for reference, please refer to the document <<WEB Operation Manual>> in the disk and the actual interface for more detailsStep 1 Open IE and input the modified camera IP address in the address bar.Step 2 The login interface is shown below, please input your user name and password (Default user name is admin and password is admin respectively), click “login”.See Figure 3-3 for more details.Figure 3-3Step 3 Install controls according to the system prompt; see Figure 3-4 for the WEB main interface. Please modify the administrator password as soon as possible after you successfully logged in.Figure 3-4Note:●This quick start guide is for reference only. Slight difference may be found in userinterface.●All the designs and software here are subject to change without prior written notice.●If there is any uncertainty or controversy, please refer to the final explanation of us.●Please visit our website or contact your local service engineer for more information.。
微秒基于双频同步的时钟同步模块说明书
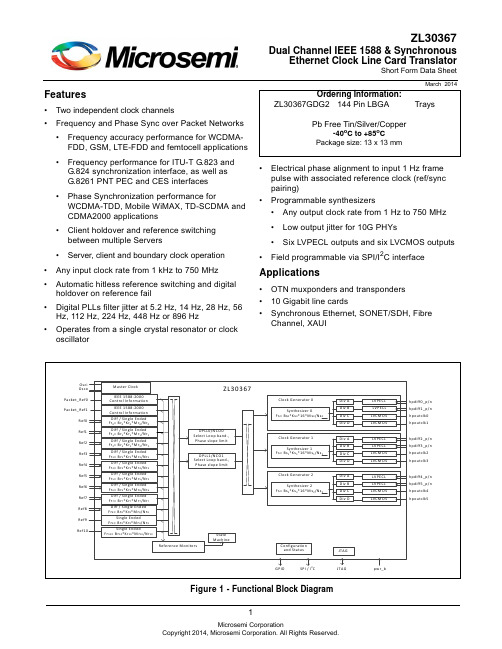
1Features•Two independent clock channels•Frequency and Phase Sync over Packet Networks •Frequency accuracy performance for WCDMA-FDD, GSM, LTE-FDD and femtocell applications •Frequency performance for ITU-T G.823 and G.824 synchronization interface, as well as G.8261 PNT PEC and CES interfaces•Phase Synchronization performance forWCDMA-TDD, Mobile WiMAX, TD-SCDMA and CDMA2000 applications•Client holdover and reference switching between multiple Servers•Server, client and boundary clock operation•Any input clock rate from 1kHz to 750MHz •Automatic hitless reference switching and digital holdover on reference fail•Digital PLLs filter jitter at 5.2 Hz, 14 Hz, 28 Hz, 56 Hz, 112 Hz, 224 Hz, 448 Hz or 896 Hz•Operates from a single crystal resonator or clock oscillator•Electrical phase alignment to input 1 Hz frame pulse with associated reference clock (ref/sync pairing)•Programmable synthesizers •Any output clock rate from 1Hz to 750MHz •Low output jitter for 10G PHYs•Six LVPECL outputs and six LVCMOS outputs•Field programmable via SPI/I 2C interfaceApplications•OTN muxponders and transponders •10Gigabit line cards•Synchronous Ethernet, SONET/SDH, Fibre Channel, XAUIMarch 2014Figure 1 - Functional Block DiagramZL30367Dual Channel IEEE 1588 & SynchronousEthernet Clock Line Card TranslatorShort Form Data SheetOrdering Information:ZL30367GDG2144 Pin LBGATraysPb Free Tin/Silver/Copper-40o C to +85o CPackage size: 13 x 13 mmDetailed FeaturesGeneral•Two independent clock channels•Operates from a single crystal resonator or clock oscillator•Configurable via SPI or I2C interfaceTime Synchronization Algorithm•External algorithm controls software digital PLL to adjust frequency & phase alignment•Frequency, Phase and Time Synchronization over IP, MPLS and Ethernet Packet Networks•Frequency accuracy performance for WCDMA-FDD, GSM, LTE-FDD and femtocell applications, with target performance less than ± 15 ppb.•Frequency performance for ITU-T G.823 and G.824 synchronization interface, as well as G.8261 PNT EEC, PNT PEC and CES interface specifications.•Phase Synchronization performance for WCDMA-TDD, Mobile WiMAX, TD-SCDMA and CDMA2000 applications with target performance less than ± 1 s phase alignment.•Time Synchronization for UTC-traceability and GPS replacement.•Client reference switching between multiple Servers•Client holdover when Server packet connectivity is lostElectrical Clock Inputs•Nine input references configurable as single ended or differential and two singled ended input references •Synchronize to any clock rate from 1kHz to 750MHz on differential inputs•Synchronize to any clock rate from 1kHz to 177.75MHz on singled-ended inputs•Synchronize to sync pulse and clock pair•Flexible input reference monitoring automatically disqualifies references based on frequency and phase irregularities•LOS•Single cycle monitor•Precise frequency monitor•Coarse frequency monitor•Guard soak timer•Per input clock delay compensationElectrical Clock Engine•Flexible two-stage architecture translates between arbitrary data rates, line coding rates and FEC rates •Internal state machine automatically controls mode of operation (free-run, locked, holdover)•Automatic hitless reference switching and digital holdover on reference fail•Physical-to-physical reference switching•Physical-to-packet reference switching•Packet-to-physical reference switching•Packet-to-packet reference switching•Selectable phase slope limiting•Supports ITU-T G.823, G.824 and G.8261 for 2048kbit/s and 1544kbit/s interfacesElectrical Clock Generation•Three programmable synthesizers•Six LVPECL outputs•Two LVPECL outputs per synthesizer•Generate any clock rate from 1Hz to 750MHz•Low output jitter for 10G PHYs•Meets OC-192, STM-64, 1 GbE & 10 GbE interface jitter requirements•Six LVCMOS outputs•Two LVCMOS outputs per synthesizer•Generate any clock rate from 1 Hz to 177.75MHz•Programmable output advancement/delay to accommodate trace delays or compensate for system routing paths•Outputs may be disabled to save powerAPI Software•Interfaces to 1588-capable PHY and switches with integrated timestamping•Abstraction layer for independence from OS and CPU, from embedded SoC to home-grown•Fits into centralized, highly integrated pizza box architectures as well as distributed architectures with multiple line cards and timing cardsInformation relating to products and services furnished herein by Microsemi Corporation or its subsidiaries (collectively “Microsemi”) is believed to be reliable. However, Microsemi assumes no liability for errors that may appear in this publication, or for liability otherwise arising from the application or use of any suchinformation, product or service or for any infringement of patents or other intellectual property rights owned by third parties which may result from such application or use. Neither the supply of such information or purchase of product or service conveys any license, either express or implied, under patents or other intellectual property rights owned by Microsemi or licensed from third parties by Microsemi, whatsoever. Purchasers of products are also hereby notified that the use of product in certain ways or in combination with Microsemi, or non-Microsemi furnished goods or services may infringe patents or other intellectual property rights owned by Microsemi.This publication is issued to provide information only and (unless agreed by Microsemi in writing) may not be used, applied or reproduced for any purpose nor form part of any order or contract nor to be regarded as a representation relating to the products or services concerned. The products, their specifications, services and other information appearing in this publication are subject to change by Microsemi without notice. No warranty or guarantee express or implied is made regarding the capability, performance or suitability of any product or service. Information concerning possible methods of use is provided as a guide only and does not constitute any guarantee that such methods of use will be satisfactory in a specific piece of equipment. It is the user’s responsibility to fully determine the performance and suitability of any equipment using such information and to ensure that any publication or data used is up to date and has not been superseded.Manufacturing does not necessarily include testing of all functions or parameters. These products are not suitable for use in any medical and other products whose failure to perform may result in significant injury or death to the user. All products and materials are sold and services provided subject to Microsemi’s conditions of sale which are available on request.Purchase of Microsemi’s I 2C components conveys a license under the Philips I 2C Patent rights to use these components in an I 2C System, provided that the system conforms to the I 2C Standard Specification as defined by Philips.Microsemi, ZL, and combinations thereof, VoiceEdge, VoicePort, SLAC, ISLIC, ISLAC and VoicePath are trademarks of Microsemi Corporation.TECHNICAL DOCUMENTATION - NOT FOR RESALEFor more information about all Microsemi productsvisit our Web Site at/timing-and-synchronization。
新视界——斯伦贝谢高清微电阻率成像仪FMI—HD
2 0 1 3 年第 6 期
陶婕 , 等: 新视界——斯伦 贝谢高清微电阻率成像仪 F MI — H D
6 9
( 4 ) 薄层检测和评价: 薄层刻画从而更好 的为高 分辨率储层评价服务 ; 快速定量计算砂泥比及砂层 厚度 ; 直观展现层厚毫米级薄层。
( 5 ) 储 层 描述 流程 : 沉 积相 和岩石类 型直 观或 自 动 结构 分类 ; 利用岩 石物理 参数重 拾储集 体 ; 识 别各
4 仪 器规 格 和性 能
测量 性能 输 出信息 测, 迷f 奎 地层 像及倾角 信息 像 模式 :I l 8 0 0英尺 , , 』 、 时 ( 5 4 9米/ 4 , r ) 1 倾 角模式 :3 6 0 0英尺/ 4 , 州 ( 1 0 9 7 米/ 4 , ) 测 量范 m 采样 率 0 1 英寸 ( O 2 5 c m)
包括倾角 、 裂缝在内的岩石结构、 层序特征和构造特
征。
纵向分辨 率
横向分辨率 !O 2英 ( 0 5 1 煺 水)
纵知分辨率 :O 2英寸 ( 0 5 I艇水)
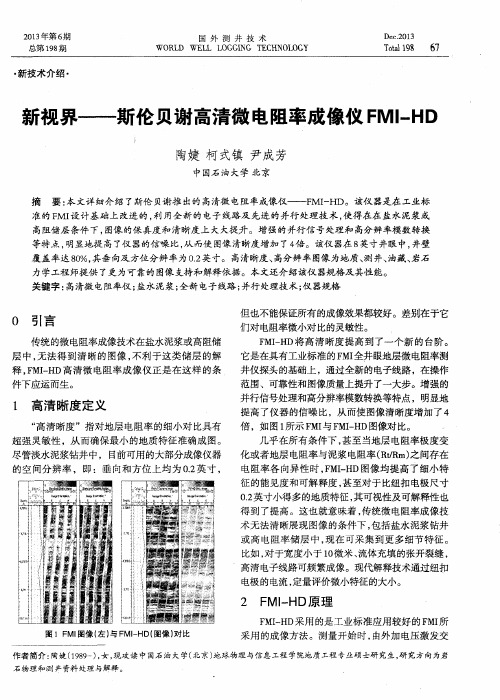
F M I — H D纽扣电极尺寸也为0 . 2 英寸 , 决定了其 空间分 辨率为 0 . 2 英寸 。当 目标体 尺寸大 于 O . 2 英寸 时, 图像的尺寸接近其实际大小。当目标体尺寸比 0 . 2 英寸小得多时, 如果 目标体 电阻率与围岩电阻率 对比鲜明, 在 图像上也是可能看到的, 但是 , 无论区 别 多小 , 成像 仪器 要 足够灵 敏 , 才能 测得 在 O . 2 英寸 测量 范围 内平 均地层 电阻率引起 的微小 变化 。
( 3 ) 增强的并行处理技术提高了信噪比; ( 4 ) 相 比传 统 的 1 0 位 数 字化 电子线路 , 1 6 位 数
太赫兹电磁波测试流程

太赫兹电磁波测试流程英文回答:Hertzian electromagnetic wave testing, also known as terahertz (THz) wave testing, is a non-destructive testing method that uses electromagnetic waves with frequencies between microwave and infrared to analyze and evaluate materials and structures. It has been widely used in various fields such as security screening, quality control, and medical imaging.The testing process of terahertz electromagnetic waves typically involves the following steps:1. Generation of terahertz waves: Terahertz waves can be generated using different techniques, such as photoconductive switches, quantum cascade lasers, or femtosecond lasers. These methods rely on the interaction between electrons and photons to produce terahertz waves.2. Terahertz wave transmission: Once generated, terahertz waves need to be transmitted to the target material or structure for testing. Terahertz waves can penetrate many non-metallic materials, such as plastics, ceramics, and fabrics, but are strongly absorbed by metals and water.3. Interaction with the sample: When terahertz waves interact with the sample, they undergo various phenomena, including reflection, transmission, absorption, and scattering. These interactions provide valuable information about the sample's properties, such as its thickness, composition, and structural defects.4. Detection and analysis: After interacting with the sample, the terahertz waves are detected and analyzed. Different detection techniques can be used, such as time-domain spectroscopy or frequency-domain spectroscopy. These techniques measure the amplitude and phase of the terahertz waves to extract information about the sample.5. Data processing and interpretation: The detectedterahertz wave signals are processed and analyzed to obtain meaningful information about the sample being tested. This may involve comparing the measured signals with reference data or using mathematical algorithms to extract specific features or parameters.6. Evaluation and decision-making: Based on the analyzed data, the sample can be evaluated and decisions can be made regarding its quality, integrity, orsuitability for a particular application. This may involve comparing the measured parameters with predefined thresholds or standards.Terahertz electromagnetic wave testing offers several advantages, such as non-destructive nature, high penetration capability, and sensitivity to material properties. However, it also has limitations, such as limited penetration through metals and water, and the need for specialized equipment and expertise.中文回答:太赫兹电磁波测试,也被称为太赫兹波(THz)测试,是一种利用介于微波和红外之间频率的电磁波来分析和评估材料和结构的非破坏性测试方法。
Glider Flying Handbook说明书
Glider Flying Handbook2013U.S. Department of TransportationFEDERAL AVIATION ADMINISTRATIONFlight Standards Servicei iPrefaceThe Glider Flying Handbook is designed as a technical manual for applicants who are preparing for glider category rating and for currently certificated glider pilots who wish to improve their knowledge. Certificated flight instructors will find this handbook a valuable training aid, since detailed coverage of aeronautical decision-making, components and systems, aerodynamics, flight instruments, performance limitations, ground operations, flight maneuvers, traffic patterns, emergencies, soaring weather, soaring techniques, and cross-country flight is included. Topics such as radio navigation and communication, use of flight information publications, and regulations are available in other Federal Aviation Administration (FAA) publications.The discussion and explanations reflect the most commonly used practices and principles. Occasionally, the word “must” or similar language is used where the desired action is deemed critical. The use of such language is not intended to add to, interpret, or relieve a duty imposed by Title 14 of the Code of Federal Regulations (14 CFR). Persons working towards a glider rating are advised to review the references from the applicable practical test standards (FAA-G-8082-4, Sport Pilot and Flight Instructor with a Sport Pilot Rating Knowledge Test Guide, FAA-G-8082-5, Commercial Pilot Knowledge Test Guide, and FAA-G-8082-17, Recreational Pilot and Private Pilot Knowledge Test Guide). Resources for study include FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, FAA-H-8083-2, Risk Management Handbook, and Advisory Circular (AC) 00-6, Aviation Weather For Pilots and Flight Operations Personnel, AC 00-45, Aviation Weather Services, as these documents contain basic material not duplicated herein. All beginning applicants should refer to FAA-H-8083-25, Pilot’s Handbook of Aeronautical Knowledge, for study and basic library reference.It is essential for persons using this handbook to become familiar with and apply the pertinent parts of 14 CFR and the Aeronautical Information Manual (AIM). The AIM is available online at . The current Flight Standards Service airman training and testing material and learning statements for all airman certificates and ratings can be obtained from .This handbook supersedes FAA-H-8083-13, Glider Flying Handbook, dated 2003. Always select the latest edition of any publication and check the website for errata pages and listing of changes to FAA educational publications developed by the FAA’s Airman Testing Standards Branch, AFS-630.This handbook is available for download, in PDF format, from .This handbook is published by the United States Department of Transportation, Federal Aviation Administration, Airman Testing Standards Branch, AFS-630, P.O. Box 25082, Oklahoma City, OK 73125.Comments regarding this publication should be sent, in email form, to the following address:********************************************John M. AllenDirector, Flight Standards Serviceiiii vAcknowledgmentsThe Glider Flying Handbook was produced by the Federal Aviation Administration (FAA) with the assistance of Safety Research Corporation of America (SRCA). The FAA wishes to acknowledge the following contributors: Sue Telford of Telford Fishing & Hunting Services for images used in Chapter 1JerryZieba () for images used in Chapter 2Tim Mara () for images used in Chapters 2 and 12Uli Kremer of Alexander Schleicher GmbH & Co for images used in Chapter 2Richard Lancaster () for images and content used in Chapter 3Dave Nadler of Nadler & Associates for images used in Chapter 6Dave McConeghey for images used in Chapter 6John Brandon (www.raa.asn.au) for images and content used in Chapter 7Patrick Panzera () for images used in Chapter 8Jeff Haby (www.theweatherprediction) for images used in Chapter 8National Soaring Museum () for content used in Chapter 9Bill Elliot () for images used in Chapter 12.Tiffany Fidler for images used in Chapter 12.Additional appreciation is extended to the Soaring Society of America, Inc. (), the Soaring Safety Foundation, and Mr. Brad Temeyer and Mr. Bill Martin from the National Oceanic and Atmospheric Administration (NOAA) for their technical support and input.vv iPreface (iii)Acknowledgments (v)Table of Contents (vii)Chapter 1Gliders and Sailplanes ........................................1-1 Introduction....................................................................1-1 Gliders—The Early Years ..............................................1-2 Glider or Sailplane? .......................................................1-3 Glider Pilot Schools ......................................................1-4 14 CFR Part 141 Pilot Schools ...................................1-5 14 CFR Part 61 Instruction ........................................1-5 Glider Certificate Eligibility Requirements ...................1-5 Common Glider Concepts ..............................................1-6 Terminology...............................................................1-6 Converting Metric Distance to Feet ...........................1-6 Chapter 2Components and Systems .................................2-1 Introduction....................................................................2-1 Glider Design .................................................................2-2 The Fuselage ..................................................................2-4 Wings and Components .............................................2-4 Lift/Drag Devices ...........................................................2-5 Empennage .....................................................................2-6 Towhook Devices .......................................................2-7 Powerplant .....................................................................2-7 Self-Launching Gliders .............................................2-7 Sustainer Engines .......................................................2-8 Landing Gear .................................................................2-8 Wheel Brakes .............................................................2-8 Chapter 3Aerodynamics of Flight .......................................3-1 Introduction....................................................................3-1 Forces of Flight..............................................................3-2 Newton’s Third Law of Motion .................................3-2 Lift ..............................................................................3-2The Effects of Drag on a Glider .....................................3-3 Parasite Drag ..............................................................3-3 Form Drag ...............................................................3-3 Skin Friction Drag ..................................................3-3 Interference Drag ....................................................3-5 Total Drag...................................................................3-6 Wing Planform ...........................................................3-6 Elliptical Wing ........................................................3-6 Rectangular Wing ...................................................3-7 Tapered Wing .........................................................3-7 Swept-Forward Wing ..............................................3-7 Washout ..................................................................3-7 Glide Ratio .................................................................3-8 Aspect Ratio ............................................................3-9 Weight ........................................................................3-9 Thrust .........................................................................3-9 Three Axes of Rotation ..................................................3-9 Stability ........................................................................3-10 Flutter .......................................................................3-11 Lateral Stability ........................................................3-12 Turning Flight ..............................................................3-13 Load Factors .................................................................3-13 Radius of Turn ..........................................................3-14 Turn Coordination ....................................................3-15 Slips ..........................................................................3-15 Forward Slip .........................................................3-16 Sideslip .................................................................3-17 Spins .........................................................................3-17 Ground Effect ...............................................................3-19 Chapter 4Flight Instruments ...............................................4-1 Introduction....................................................................4-1 Pitot-Static Instruments ..................................................4-2 Impact and Static Pressure Lines................................4-2 Airspeed Indicator ......................................................4-2 The Effects of Altitude on the AirspeedIndicator..................................................................4-3 Types of Airspeed ...................................................4-3Table of ContentsviiAirspeed Indicator Markings ......................................4-5 Other Airspeed Limitations ........................................4-6 Altimeter .....................................................................4-6 Principles of Operation ...........................................4-6 Effect of Nonstandard Pressure andTemperature............................................................4-7 Setting the Altimeter (Kollsman Window) .............4-9 Types of Altitude ......................................................4-10 Variometer................................................................4-11 Total Energy System .............................................4-14 Netto .....................................................................4-14 Electronic Flight Computers ....................................4-15 Magnetic Compass .......................................................4-16 Yaw String ................................................................4-16 Inclinometer..............................................................4-16 Gyroscopic Instruments ...............................................4-17 G-Meter ........................................................................4-17 FLARM Collision Avoidance System .........................4-18 Chapter 5Glider Performance .............................................5-1 Introduction....................................................................5-1 Factors Affecting Performance ......................................5-2 High and Low Density Altitude Conditions ...........5-2 Atmospheric Pressure .............................................5-2 Altitude ...................................................................5-3 Temperature............................................................5-3 Wind ...........................................................................5-3 Weight ........................................................................5-5 Rate of Climb .................................................................5-7 Flight Manuals and Placards ..........................................5-8 Placards ......................................................................5-8 Performance Information ...........................................5-8 Glider Polars ...............................................................5-8 Weight and Balance Information .............................5-10 Limitations ...............................................................5-10 Weight and Balance .....................................................5-12 Center of Gravity ......................................................5-12 Problems Associated With CG Forward ofForward Limit .......................................................5-12 Problems Associated With CG Aft of Aft Limit ..5-13 Sample Weight and Balance Problems ....................5-13 Ballast ..........................................................................5-14 Chapter 6Preflight and Ground Operations .......................6-1 Introduction....................................................................6-1 Assembly and Storage Techniques ................................6-2 Trailering....................................................................6-3 Tiedown and Securing ................................................6-4Water Ballast ..............................................................6-4 Ground Handling........................................................6-4 Launch Equipment Inspection ....................................6-5 Glider Preflight Inspection .........................................6-6 Prelaunch Checklist ....................................................6-7 Glider Care .....................................................................6-7 Preventive Maintenance .............................................6-8 Chapter 7Launch and Recovery Procedures and Flight Maneuvers ............................................................7-1 Introduction....................................................................7-1 Aerotow Takeoff Procedures .........................................7-2 Signals ........................................................................7-2 Prelaunch Signals ....................................................7-2 Inflight Signals ........................................................7-3 Takeoff Procedures and Techniques ..........................7-3 Normal Assisted Takeoff............................................7-4 Unassisted Takeoff.....................................................7-5 Crosswind Takeoff .....................................................7-5 Assisted ...................................................................7-5 Unassisted...............................................................7-6 Aerotow Climb-Out ....................................................7-6 Aerotow Release.........................................................7-8 Slack Line ...................................................................7-9 Boxing the Wake ......................................................7-10 Ground Launch Takeoff Procedures ............................7-11 CG Hooks .................................................................7-11 Signals ......................................................................7-11 Prelaunch Signals (Winch/Automobile) ...............7-11 Inflight Signals ......................................................7-12 Tow Speeds ..............................................................7-12 Automobile Launch ..................................................7-14 Crosswind Takeoff and Climb .................................7-14 Normal Into-the-Wind Launch .................................7-15 Climb-Out and Release Procedures ..........................7-16 Self-Launch Takeoff Procedures ..............................7-17 Preparation and Engine Start ....................................7-17 Taxiing .....................................................................7-18 Pretakeoff Check ......................................................7-18 Normal Takeoff ........................................................7-19 Crosswind Takeoff ...................................................7-19 Climb-Out and Shutdown Procedures ......................7-19 Landing .....................................................................7-21 Gliderport/Airport Traffic Patterns and Operations .....7-22 Normal Approach and Landing ................................7-22 Crosswind Landing ..................................................7-25 Slips ..........................................................................7-25 Downwind Landing ..................................................7-27 After Landing and Securing .....................................7-27viiiPerformance Maneuvers ..............................................7-27 Straight Glides ..........................................................7-27 Turns.........................................................................7-28 Roll-In ...................................................................7-29 Roll-Out ................................................................7-30 Steep Turns ...........................................................7-31 Maneuvering at Minimum Controllable Airspeed ...7-31 Stall Recognition and Recovery ...............................7-32 Secondary Stalls ....................................................7-34 Accelerated Stalls .................................................7-34 Crossed-Control Stalls ..........................................7-35 Operating Airspeeds .....................................................7-36 Minimum Sink Airspeed ..........................................7-36 Best Glide Airspeed..................................................7-37 Speed to Fly ..............................................................7-37 Chapter 8Abnormal and Emergency Procedures .............8-1 Introduction....................................................................8-1 Porpoising ......................................................................8-2 Pilot-Induced Oscillations (PIOs) ..............................8-2 PIOs During Launch ...................................................8-2 Factors Influencing PIOs ........................................8-2 Improper Elevator Trim Setting ..............................8-3 Improper Wing Flaps Setting ..................................8-3 Pilot-Induced Roll Oscillations During Launch .........8-3 Pilot-Induced Yaw Oscillations During Launch ........8-4 Gust-Induced Oscillations ..............................................8-5 Vertical Gusts During High-Speed Cruise .................8-5 Pilot-Induced Pitch Oscillations During Landing ......8-6 Glider-Induced Oscillations ...........................................8-6 Pitch Influence of the Glider Towhook Position ........8-6 Self-Launching Glider Oscillations During Powered Flight ...........................................................8-7 Nosewheel Glider Oscillations During Launchesand Landings ..............................................................8-7 Tailwheel/Tailskid Equipped Glider Oscillations During Launches and Landings ..................................8-8 Aerotow Abnormal and Emergency Procedures ............8-8 Abnormal Procedures .................................................8-8 Towing Failures........................................................8-10 Tow Failure With Runway To Land and Stop ......8-11 Tow Failure Without Runway To Land BelowReturning Altitude ................................................8-11 Tow Failure Above Return to Runway Altitude ...8-11 Tow Failure Above 800' AGL ..............................8-12 Tow Failure Above Traffic Pattern Altitude .........8-13 Slack Line .................................................................8-13 Ground Launch Abnormal and Emergency Procedures ....................................................................8-14 Abnormal Procedures ...............................................8-14 Emergency Procedures .............................................8-14 Self-Launch Takeoff Emergency Procedures ..............8-15 Emergency Procedures .............................................8-15 Spiral Dives ..................................................................8-15 Spins .............................................................................8-15 Entry Phase ...............................................................8-17 Incipient Phase .........................................................8-17 Developed Phase ......................................................8-17 Recovery Phase ........................................................8-17 Off-Field Landing Procedures .....................................8-18 Afterlanding Off Field .............................................8-20 Off-Field Landing Without Injury ........................8-20 Off-Field Landing With Injury .............................8-20 System and Equipment Malfunctions ..........................8-20 Flight Instrument Malfunctions ................................8-20 Airspeed Indicator Malfunctions ..........................8-21 Altimeter Malfunctions .........................................8-21 Variometer Malfunctions ......................................8-21 Compass Malfunctions .........................................8-21 Glider Canopy Malfunctions ....................................8-21 Broken Glider Canopy ..........................................8-22 Frosted Glider Canopy ..........................................8-22 Water Ballast Malfunctions ......................................8-22 Retractable Landing Gear Malfunctions ..................8-22 Primary Flight Control Systems ...............................8-22 Elevator Malfunctions ..........................................8-22 Aileron Malfunctions ............................................8-23 Rudder Malfunctions ............................................8-24 Secondary Flight Controls Systems .........................8-24 Elevator Trim Malfunctions .................................8-24 Spoiler/Dive Brake Malfunctions .........................8-24 Miscellaneous Flight System Malfunctions .................8-25 Towhook Malfunctions ............................................8-25 Oxygen System Malfunctions ..................................8-25 Drogue Chute Malfunctions .....................................8-25 Self-Launching Gliders ................................................8-26 Self-Launching/Sustainer Glider Engine Failure During Takeoff or Climb ..........................................8-26 Inability to Restart a Self-Launching/SustainerGlider Engine While Airborne .................................8-27 Self-Launching Glider Propeller Malfunctions ........8-27 Self-Launching Glider Electrical System Malfunctions .............................................................8-27 In-flight Fire .............................................................8-28 Emergency Equipment and Survival Gear ...................8-28 Survival Gear Checklists ..........................................8-28 Food and Water ........................................................8-28ixClothing ....................................................................8-28 Communication ........................................................8-29 Navigation Equipment ..............................................8-29 Medical Equipment ..................................................8-29 Stowage ....................................................................8-30 Parachute ..................................................................8-30 Oxygen System Malfunctions ..................................8-30 Accident Prevention .....................................................8-30 Chapter 9Soaring Weather ..................................................9-1 Introduction....................................................................9-1 The Atmosphere .............................................................9-2 Composition ...............................................................9-2 Properties ....................................................................9-2 Temperature............................................................9-2 Density ....................................................................9-2 Pressure ...................................................................9-2 Standard Atmosphere .................................................9-3 Layers of the Atmosphere ..........................................9-4 Scale of Weather Events ................................................9-4 Thermal Soaring Weather ..............................................9-6 Thermal Shape and Structure .....................................9-6 Atmospheric Stability .................................................9-7 Air Masses Conducive to Thermal Soaring ...................9-9 Cloud Streets ..............................................................9-9 Thermal Waves...........................................................9-9 Thunderstorms..........................................................9-10 Lifted Index ..........................................................9-12 K-Index .................................................................9-12 Weather for Slope Soaring .......................................9-14 Mechanism for Wave Formation ..............................9-16 Lift Due to Convergence ..........................................9-19 Obtaining Weather Information ...................................9-21 Preflight Weather Briefing........................................9-21 Weather-ReIated Information ..................................9-21 Interpreting Weather Charts, Reports, andForecasts ......................................................................9-23 Graphic Weather Charts ...........................................9-23 Winds and Temperatures Aloft Forecast ..............9-23 Composite Moisture Stability Chart .....................9-24 Chapter 10Soaring Techniques ..........................................10-1 Introduction..................................................................10-1 Thermal Soaring ...........................................................10-2 Locating Thermals ....................................................10-2 Cumulus Clouds ...................................................10-2 Other Indicators of Thermals ................................10-3 Wind .....................................................................10-4 The Big Picture .....................................................10-5Entering a Thermal ..............................................10-5 Inside a Thermal.......................................................10-6 Bank Angle ...........................................................10-6 Speed .....................................................................10-6 Centering ...............................................................10-7 Collision Avoidance ................................................10-9 Exiting a Thermal .....................................................10-9 Atypical Thermals ..................................................10-10 Ridge/Slope Soaring ..................................................10-10 Traps ......................................................................10-10 Procedures for Safe Flying .....................................10-12 Bowls and Spurs .....................................................10-13 Slope Lift ................................................................10-13 Obstructions ...........................................................10-14 Tips and Techniques ...............................................10-15 Wave Soaring .............................................................10-16 Preflight Preparation ...............................................10-17 Getting Into the Wave ............................................10-18 Flying in the Wave .................................................10-20 Soaring Convergence Zones ...................................10-23 Combined Sources of Updrafts ..............................10-24 Chapter 11Cross-Country Soaring .....................................11-1 Introduction..................................................................11-1 Flight Preparation and Planning ...................................11-2 Personal and Special Equipment ..................................11-3 Navigation ....................................................................11-5 Using the Plotter .......................................................11-5 A Sample Cross-Country Flight ...............................11-5 Navigation Using GPS .............................................11-8 Cross-Country Techniques ...........................................11-9 Soaring Faster and Farther .........................................11-11 Height Bands ..........................................................11-11 Tips and Techniques ...............................................11-12 Special Situations .......................................................11-14 Course Deviations ..................................................11-14 Lost Procedures ......................................................11-14 Cross-Country Flight in a Self-Launching Glider .....11-15 High-Performance Glider Operations and Considerations ............................................................11-16 Glider Complexity ..................................................11-16 Water Ballast ..........................................................11-17 Cross-Country Flight Using Other Lift Sources ........11-17 Chapter 12Towing ................................................................12-1 Introduction..................................................................12-1 Equipment Inspections and Operational Checks .........12-2 Tow Hook ................................................................12-2 Schweizer Tow Hook ...........................................12-2x。
爱迪思x 版本 10.32.8750 发布说明说明书

EDIUS® X EDIT ANYTHING. FAST Software version 10.32.8750Release NotesMay 2022Copy and Trademark NoticeGrass Valley®, GV® and the Grass Valley logo and / or any of the Grass Valley products listed in this document are trademarks or registered trademarks of GVBB Holdings SARL, Grass Valley USA, LLC, or one of its affiliates or subsidiaries. All third party intellectual property rights (including logos or icons) remain the property of their respective ownersCopyright ©2021 GVBB Holdings SARL and Grass Valley USA, LLC. All rights reserved.Specifications are subject to change without notice.Other product names or related brand names are trademarks or registered trademarks of their respective companies.Terms and ConditionsPlease read the following terms and conditions carefully. By using EDIUS documentation, you agree to the following terms and conditions.Grass Valley hereby grants permission and license to owners of to use their product manuals for their own internal business use. Manuals for Grass Valley products may not be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, for any purpose unless specifically authorized in writing by Grass Valley.A Grass Valley manual may have been revised to reflect changes made to the product during its manufacturing life.Thus, different versions of a manual may exist for any given product. Care should be taken to ensure that one obtains the proper manual version for a specific product serial number.Information in this document is subject to change without notice and does not represent a commitment on the part of Grass Valley.Warranty i nformation is available from the Legal Terms and Conditions section of Grass Valley’s website ().Important NotificationSupported OSWindows 7 OS is no longer supported. You are only able to use EDIUS X on Windows 10 or 11 OS.If Windows Defender SmartScreen prevents the installer from startingIf Windows Defender SmartScreen prevents the installer from starting, please follow the following steps.1) Right-click the installer file then select “Properties”2) Open “Digital Signatures” tab then make sure the file has the digital signature of “GRASS VALLEY K.K.”3) Open “General” tab then check [Unlock] checkbox4) Click [Apply] button, then click [OK] button5) Run the installer againUsing with Floating LicenseIf Floating License Server is being used, its version has to be the same (or upper) as EDIUS X.Precautions when using subscription licensesSubscription licenses have the following restrictions:∙Bonus Contents for EDIUS X including the OFX Bridge are not available*OpenFX plugins cannot be used because the OFX Bridge is not available∙Disc Burner is not available∙H.264/AVC Blu-ray and Blu-ray 3D exporters are not available∙Internet connection is required for regular online validation of the licenses and the eID even for Workgroup∙The same license is not allowed to be installed on two computers at the same time*Some types of perpetual licenses are permitted to be installed on up to two computers per license only for use by asingle user under certain conditionsIf the above restrictions are an issue, please consider purchasing perpetual licenses.About offline usageFrom 10.30, the maximum offline usage period for licenses that require Internet access regularly, such as EDIUS X Pro, is shortened from 60 days to 30 days.Upgrading from an earlier buildIf you update EDIUS X from build 10.20 or earlier, eID log in dialog appears at the first startup.∙You can skip the eID validation only in Workgroup license∙If the eID validation skipped to start Workgroup editor, eID log in dialog doesn’t appear on subsequent running of EDIUS∙Internet connection is required for eID validationIf you upgrade EDIUS X from build 10.21 or earlier, the following settings of GV Job Monitor will be reset to the default settings:- Windows colors- Display settings of jobsUsing with virtual machinesWhen a virtual machine is created by duplicating another virtual machine on which EDIUS has been installed, please follow the following steps to use EDIUS with the created machine:1) Run SelfCertificationInstaller.exe on "C:\Program Files\Grass Valley\EDIUS Hub"2) Restart the OS*Only EDIUS Cloud supports use with virtual machines in cloud environments such as AWSSystem RequirementsThe following are the system requirements of this build*System requirements are subject to change without noticeNew Features & fixed issuesNew Features*No additional / improved featureFixed or improved issuesThe following issues are fixed or improved in this version:EDIUS∙When a partial render job is divided into multiple jobs, the order of these jobs is incorrect∙Export with the option "Export Between In and Out" fails if the timeline has a sequence on which "Remove cut points" is possible∙EDIUS crashes when performing "Consolidate Project" if audio waveform is displayed in the timeline∙External Render Engine crashes if EDIUS Hub Server is not found (EDIUS Hub Server environment only) Mync*No fix providedKnown issuesThis build has below known issues:EDIUS∙Frame number of source timecode is always shown as even number in 50p/60p clips∙There is a security software that detect EDIUS.exe as a malware∙Encoding in Dolby Digital Professional/Plus changes the volume of audio∙Standalone GV Job Monitor requests “EdiusHubPackage.msi” when it is launchedWorkaround: Use EDIUS integrated GV Job Monitor∙Two “EDIUS X” items appear in “App & Features” in Windows settings∙MPEG2 Elementary Stream exporter is unavailable∙Some of third party plug-ins and Bonus Contents cannot be uninstalled or updated properly if GV Render Engine is running in the backgroundWorkaround: Follow the following steps when uninstalling or updating plug-ins:1. Close EDIUS if it is running2. Click GV Render Engine on the Taskbar, then select "Pause"*If GV Render Engine is not found on the Taskbar, sign out all accounts from the OS, then sign in with the accountused to uninstall or update plug-ins3. Uninstall or update plug-ins4. Click GV Render Engine on the Taskbar, then select "Start"∙Updating Floating License Server fails if the installed version is 10.30 or earlierWorkaround: Uninstall the old version first∙If the OS has not been restarted after changing the display scaling, sizes of texts created by QuickTitler will be unexpectedly changed at the exportWorkaround: Restart GV Render Engine before file export (See FAQ for the steps)∙AVCHD 3D writer exporter fails to export files∙When a clip exported by the P2 3D exporter is registered in the bin, it will be handled as a sequence clip instead of a 3D clip∙When "Separate Left and Right" is selected to export a stereoscopic clip, only the L side file is export∙"Add and Transfer to Bin" from Amazon S3 source browser fails if the path contains multibyte characters (EDIUS Cloud only)∙Vorbis exporter fails if the number of audio channels is 7 or 8, even though the exporter's specifications allow up to 8 channels of audio∙When exporting MP3 audio, noise is exported if "Bit Depth" of audio format is set to 20bit∙The color space of the project settings is not reflected to still image files created by "Create a Still Image"function∙File export from a checked out project failsMync∙Updating Floating License Server fails if the installed version is 10.30 or earlierWorkaround: Uninstall the old version firstDesign LimitationsRestrictions by no support of QuickTime for WindowsIn both EDIUS X and Mync, QuickTime modules are no longer used even though installing QuickTime Essentials. As the result, the following file formats are no longer supported:∙Still Image File Formats: Flash Pix; Mac Pict; QuickTime Image∙Video File Formats (Import / Export): M4V or some MOV file formats*MOV files whose video formats are general ones such as MPEG-2, H.264/AVC, ProRes, etc. are able to be imported / exported∙Video File Formats (Export): 3GP (MOV); 3G2 (MOV)∙Audio File Formats: MOV (other than Linear PCM and AAC); QuickTime AudioIMPORTANT NOTEIf loaded project contains type of above clips, they will be off-line in EDIUS X。
单晶X射线衍射仪(RAPIDIP)操作规程
单晶X射线衍射仪(RAPID IP)操作规程1.打开水箱电源2.打开衍射仪控制面板开关(POWER ON)3.打开X射线开关(X-RAY ON)4.先把电压调到40kV,再把电流调到100-200mA5.按DOOR按钮,等待听到“嘀嘀”的提示音后,打开衍射仪的防护门,取出侧角头6.到显微镜下挑选单晶样品,并将其粘在侧角头的尖端7.将粘有晶体的侧角头放到侧角头的基座上,旋紧螺丝8.到仪器控制电脑前,打开控制软件,把晶体的中心调整到与摄像头的十字叉丝中心重合,关闭衍射仪的防护门9.进入控制软件,先做指标化(INDEX),选中合理的晶胞参数10.根据LAUE群,设定合理的数据收集策略,保证完全度(completeness)在98%以上,冗余度(redundancy)在2-3之间,开始收集数据11.结束后,对数据作积分,吸收校正和还原,最后得到hkl文件12.全部测试完成后,先关闭控制软件,再关闭仪器13.关闭仪器的顺序是,先把电流降到最小值,然后把电压降到最小值,然后关闭X射线(X-RAY OFF)14.关闭衍射仪控制面板开关(POWER OFF)15.等待至少30分钟,关闭水箱电源16.仪器校准使用标准物cytidine,测试结果应达到如下指标:Table 1. Crystal data and structure refinement for cytidine. Identification code cytidineEmpirical formula C9 H13 N3 O5Formula weight 243.22Temperature 296(2) KWavelength 0.71073 ACrystal system, space group Orthorhombic, P2(1)2(1)2(1)Unit cell dimensions a = 5.1158(7) A alpha = 90 deg.b = 13.987(2) A beta = 90 deg.c = 14.784(2) A gamma = 90 deg. V olume 1057.9(3) A^3Z, Calculated density 4, 1.527 Mg/m^3Absorption coefficient 0.126 mm^-1F(000) 512Theta range for data collection 2.76 to 26.50 deg.Limiting indices -6<=h<=6, -17<=k<=17, -17<=l<=18 Reflections collected / unique 6830 / 1300 [R(int) = 0.0354] Completeness to theta = 26.50 99.0 %Refinement method Full-matrix least-squares on F^2 Data / restraints / parameters 1300 / 0 / 154Goodness-of-fit on F^2 1.108Final R indices [I>2sigma(I)] R1 = 0.0300, wR2 = 0.0825R indices (all data) R1 = 0.0305, wR2 = 0.0829Figure 1. Crystal structure of cytidine (50% thermal ellipsoid plot) .。
得胜PC-K200专业录音麦克风使用说明书

240°
210°
180°
• Weight: about 351g
30° 60° 90° 120°
150°
Note: The above data are measured by Takstar laboratory, and Takstar has the final
interpretation right!
PC-K200 专业录音麦克风 Professional Recording Microphone 使用手册 User Manual
PC-K200 专业录音麦克风
前言
尊敬的用户: 感谢您选购得胜PC-K200专业录音麦克风,为了您能够更好的了解使用本
产品,建议您在使用前仔细阅读本说明书。 若存在有疑问或者您有宝贵的建议,可通过拨打得胜官方
07
PC-K200 专业录音麦克风
环保说明
08
PC-K200 Professional Recording Microphone
Preface
Dear Customer, Thank you for purchasing Takstar PC-K200 Professional Recording Microphone. In order to better understand and use the product, please read this manual carefully. If you have any questions or suggestions, please contact our local dealer.
pops noise.
Applications
Live broadcast, karaoke, personal recording, instrument recording
Philips 27E1N5600AE USB-C 多功能显示器说明书

Philips MonitorUSB-C monitor5000 series27" (68.6 cm)2560 x 1440 (QHD)27E1N5600AESimplify your connectionswith USB-CThis Philips USB-C multipurpose monitor offers clutter-free setup. With a single cable youcan view smooth high-resolution video, transfer data, and charge your laptop. A true hubfor mobile professionals.Single cable USB-C connection•Connect your notebook with one USB-C cableSuperb Picture Quality•IPS LED wide view technology for image and color accuracy•Crystalclear images with Quad HD 2560 x 1440 pixels•1ms (MPRT) fast response for crisp image and smooth gameplay•SmartImage game mode optimized for gamers•SmartContrast for rich black detailsFeatures designed for you•LowBlue mode and Flicker-free easy-on-the eyes viewing•Built-in stereo speakers for multimedia•Tilt, pivot and height-adjust for an ideal viewing position•EasyRead mode for a paper-like reading experience•Cable management reduces cable clutter for neat workspace•EasySelect menu toggle key for quick on-screen menu accessHighlightsUSB-C connectionThis Philips display features a USB type-C connector with power delivery. Withintelligent and flexible power management, you can power charge your compatible device directly. Its slim, reversible USB-C allows for easy, one-cable connection. You can watch high resolution video and transfer data at a super-speed, while powering up and re-charging your compatible device at the same time.1ms MPRT fast responseMPRT (motion picture response time) is more intuitive way to describe the response time, which directly refers the duration from seeing blurry noise to clean and crisp images. Philips gaming monitor with 1 ms MPRT effectively eliminates smearing and motion blur, delivers shaper and precise visuals to enhance gaming experience. Best choice for playing thrilling and twitch-sensitive games.Crystalclear imagesThese Philips screens deliver Crystalclear, Quad HD 2560x1440 or 2560x1080 pixel images. Utilizing high performance panels with high density pixel count, enabled by high bandwidth sources like USB-C, Displayport, HDMI, these new displays will make your images and graphics come alive. Whether you are demanding professional requiringextremely detailed information for CAD-CAM solutions, using 3D graphic applications or a financial wizard working on huge spreadsheets, Philips displays will give you Crystalclear images.SmartImage Game modeThe new Philips gaming display has quick access OSD fine tuned for gamers, offering you multiple options. "FPS" mode (First person shooting) improves dark themes in games, allowing you to see hidden objects in dark areas. "Racing" mode adapts display with fastest response time, high color, along with image adjustments. "RTS" mode (Real time strategy) has a special SmartFrame mode which enables highlighting of specific area and allows for size and image adjustments. Gamer 1 and Gamer 2 enable you to save personalcustomized settings based on different games, ensuring best performance.LowBlue Mode & Flicker-freeOur LowBlue Mode and Flicker-freetechnology have been developed to reduce eye strain and fatigue often caused by long hours in front of a monitor.Built-in stereo speakersA pair of high quality stereo speakers built into a display device. It can be visible front firing, or invisible down firing, top firing, rear firing, etc depending on model and design.Compact Ergo BaseThe Compact Ergo Base is a people-friendly Philips monitor base that tilts, pivot and height-adjusts so each user can position the monitorfor maximum viewing comfort and efficiency.Issue date 2023-09-13 Version: 3.1.112 NC: 8670 001 80248 EAN: 87 12581 78340 2© 2023 Koninklijke Philips N.V.All Rights reserved.Specifications are subject to change without notice. Trademarks are the property of Koninklijke Philips N.V. or their respective owners.SpecificationsPicture/Display•LCD panel type: IPS technology•Backlight type: W-LED system•Panel Size: 27 inch / 68.6 cm•Display Screen Coating: Anti-Glare, 3H, Haze 25%•Effective viewing area: 596.736 (H) x 335.664 (V)•Aspect ratio: 16:9•Maximum resolution: 2560 x 1440 @ 75 Hz*•Pixel Density: 108.79 PPI•Response time (typical): 4 ms (Gray to Gray)*•MPRT:1ms•Brightness: 300 cd/m²•Contrast ratio (typical): 1000:1•SmartContrast: Mega Infinity DCR•Pixel pitch: 0.2331 x 0.2331 mm•Viewing angle: 178º (H) / 178º (V), @ C/R > 10•Flicker-free•Picture enhancement: SmartImage game •Color gamut (typical): NTSC 102.2%*, sRGB 114.18%*•Display colors: 16.7 M•Scanning Frequency: 30 - 114 kHz (H) / 48 - 75 Hz (V)•LowBlue Mode•EasyRead•sRGB•Adaptive syncConnectivity•Signal Input: HDMI 1.4 x 1, DisplayPort 1.2 x 1, USB-C 3.2 Gen 1 x 1 (upstream, Power Delivery up to 65W)•HDCP: HDCP 1.4 (HDMI / DisplayPort / USB-C)•USB:: USB 3.2 x 4 (downstream with 1 fast charge B.C 1.2)•Sync Input: Separate Sync•Audio (In/Out): Audio outUSB•USB-C: Reversible plug connector•Super speed: Data and Video transfer•DP: Built-in Display Port Alt mode•Power delivery: USB PD version 3.0•USB-C max. power delivery: Up to 65W (5V/3A, 9V/3A, 10V/3A, 12V/3A, 15V/3A, 20V/3.25A) Convenience•Built-in Speakers: 3 W x 2•User convenience:Power On/Off, Menu, Volume, Input, SmartImage Game•OSD Languages: Brazil Portuguese, Czech, Dutch, English, Finnish, French, German, Greek, Hungarian, Italian, Japanese, Korean, Polish, Portuguese, Russian, Simplified Chinese, Spanish, Swedish, Traditional Chinese, Turkish, Ukrainian •Other convenience: Kensington lock, VESA mount(100x100mm)•Plug & Play Compatibility: DDC/CI, Mac OS X,sRGB, Windows 10 / 8.1 / 8 / 7Stand•Height adjustment: 130 mm•Pivot: -/+ 90 degree•Tilt: -5/20 degreePower•On mode: 29.1 W (typ.)•Standby mode: 0.5 W (typ.)•Off mode: 0.3 W (typ.)•Energy Label Class: F•Power LED indicator: Operation - White, Standbymode- White (blinking)•Power supply: Internal, 100-240VAC, 50-60HzDimensions•Product with stand(max height): 614 x 510 x212 mm•Product without stand (mm): 614 x 365 x 52 mm•Packaging in mm (WxHxD): 780 x 525 x 186 mmWeight•Product with stand (kg): 6.56 kg•Product without stand (kg): 4.70 kg•Product with packaging (kg): 10.64 kgOperating conditions•Temperature range (operation): 0 to 40 °C•Temperature range (storage): -20 to 60 °C•Relative humidity: 20%-80 %•Altitude: Operation: +12,000ft (3,658m), Non-operation: +40,000ft (12,192m)•MTBF: 50,000 hrs (excluding backlight) hour(s)Sustainability•Environmental and energy: RoHS•Recyclable packaging material: 100 %•Specific Substances: Mercury free, PVC / BFR freehousingCompliance and standards•Regulatory Approvals: CB, CE Mark, CU-EAC,EAEU RoHS, FCC Class B, ICES-003, TUV/ISO9241-307, TUV-BAUARTCabinet•Color: Black•Finish: TexturedWhat's in the box?•Monitor with stand•Cables: HDMI cable, USB-C to USB-C cable,Power cable•User Documentation*"IPS" word mark / trademark and related patents on technologiesbelong to their respective owners.*The maximum resolution works for either HDMI input or DP input.*For best output performance, please always ensure that your graphiccard is capable of achieving the maximum resolution and refresh rateof this Philips display.*Response time value equal to SmartResponse*MPRT is to adjust brightness for blur reduction, so cannot adjustbrightness while MPRT is turned on. To reduce motion blur, LEDbacklight will strobe synchronously with screen refresh, which maycause noticeable brightness change.*MPRT is gaming-optimized mode. Turn on MPRT may causenoticeable screen flickering. It is recommended to turn off when youare not using the gaming function.*NTSC Area based on CIE1976*sRGB Area based on CIE1931*For USB-C power and charging function, your Notebook/devicemust support USB-C standard Power Delivery specifications. Pleasecheck with your Notebook user manual or manufacturer for moredetails.*For Video transmission via USB-C, your Notebook/device mustsupport USB-C DP Alt mode*The monitor may look different from feature images.。
将视频流中的视频帧传送到显示器的方法及相应装置[发明专利]
![将视频流中的视频帧传送到显示器的方法及相应装置[发明专利]](https://img.taocdn.com/s3/m/0f1e8bf7fc4ffe473268ab58.png)
专利名称:将视频流中的视频帧传送到显示器的方法及相应装置
专利类型:发明专利
发明人:蒂埃里·凯雷,弗兰克·戴维,罗兰德·贝亚塞
申请号:CN201811538893.X
申请日:20181214
公开号:CN110012333A
公开日:
20190712
专利内容由知识产权出版社提供
摘要:在视频流系统中,减小了视频帧的解码与这些视频帧在显示器上的渲染之间的延迟。
针对接收的视频流获取视频编码帧速率。
从显示器获取显示器支持的刷新速率。
在显示器支持的刷新速率中,选择是视频编码帧速率的倍数的刷新速率。
所选择的刷新速率在配置命令中被传送给显示器,并且解码视频帧被传送给显示器。
申请人:交互数字CE专利控股公司
地址:法国巴黎
国籍:FR
代理机构:中科专利商标代理有限责任公司
代理人:纪雯
更多信息请下载全文后查看。
华硕(ASUS)智能路由器产品说明书

The Clare -branded Add-on switch is required for Multi-Switch 3-way or 4-way installations.Connecting the traveler terminal of this switch to a standard, non-Clare -branded switch will cause damage or result in improper function. If this switch is a part of a 3-way or 4-way multi-switch installation, do not connect the traveler wire or apply power until Clare -branded Add-on switches are correctly installed. For more information on 3-Way or 4-Way installations, view the manual or quick-start guide that comes with the Clare Add-on switch.This device supports Association Command Class (3 Groups)• Association Group 1 supports Lifeline, Switch Multilevel Report• Association Group 2 supports Basic Set and is controlled by pressing the On or Off button with the local load• Association Group 3 supports Basic Set and is controlled by double pressing the On or Off button • Each Association Group supports 5 total nodesZ-WAVE INTEROPERABILITYThis product can be included and operated in any Z-Wave network with other Z-Wave certified devices from other manufacturers and/or other applications. All non-battery operated nodes within the network will act as repeaters regardless of vendor to increase reliability of the network.SPECIFICATIONS ZW4002Power: 120 VAC, 60 Hz. | Signal (Frequency): 908.4/916 MHz.Maximum Loads: 2.5A No more than two identical fans to the switch. Not to exceed 2.5 Amp resistive load. CONTROLS FAN MOTOR ONLY. For use only with split capacitor or shaded pole ceiling fan motors.Range: Up to 150 feet line of sight between the Wireless Controller and the closest Z-Wave receiver module. Operating Temperature Range: 32-104° F (0-40° C)For indoor use only.Specifications subject to change without notice due to continuing product improvementWarrantyClare Controls offers a two (2) year limited warranty on original Clare Controls components, from the date of shipment from Clare Controls. To view complete limited warranty details, including limitations and exclusions, visit /warranty.All brand names shown are trademarks of their respective owners. DOC ID 2010Rev 01DOC ID 2010Rev 01。
太赫兹双十字形吸波器的仿真与测试

太赫兹双十字形吸波器的仿真与测试一、结构描述图2-25给出了太赫兹双十字形吸波器的结构单元示意图,该结构共有3层:最上层是由一大一小两种十字形金属贴片周期性排列组成的;最下层是金属底板,其厚度远大于金属在该频段的趋肤深度;中间层是一块介质平板,将上、下两部分分隔开来。
该结构的几何参数为Px =900μm,Py=2Px,L1=400μm,L2=600μm,w1=w2=300μm,d=400μm,h=370μm。
介质平板的材料为FR4,其相对介电常数为εr=4.4,损耗角的正切为tanδ=0.03[29]。
金属贴片和金属底板的材料都是铜,厚度t=18μm,电导率为σ=5.8×107S/m。
图2-25 太赫兹双十字形吸波器结构示意图二、仿真结果与分析图2-26给出了顶层贴片为4种不同配置时的吸收曲线。
其中短划线代表顶层无十字贴片时介质-金属结构的仿真结果;点线和点划线分别代表顶层只有小十字贴片的小十字结构以及顶层只有大十字贴片的大十字结构的仿真结果;短划线和实线分别代表TE模式(电场方向沿x轴)和TM模式(电场方向沿y轴)下双十字结构的吸收曲线。
可见介质-金属结构在f=0.293处存在一个吸收峰,同时其他3种结构均在该频率处实现了较高的吸收效果。
这种现象可以使用干涉相消理论来解释:谐振频率f0=0.293可以转化为波长λ=1 024μm,对应介质中的波长λ′0=λ/n=488μm,其中n=2.098是FR4介质的折射率。
在本结构中,FR4的厚度h=370μm≈3λ0/4,恰好接近λ/4的3倍。
当电磁波垂直入射时,发生干涉相消需要满足公式4nd=(2k-1)λ(k=1,2,3,…),其中n是材料折射率,d是材料厚度。
因此,入射波的反射部分与铜底板反射回来的出射波干涉相消,吸波器表面对入射波的反射大幅降低,最终导致吸收值的上升。
图2-26中的小十字结构和大十字结构分别只给出了一条吸收曲线,这是因为这两种结构都是对称的,在TE、TM 两种极化模式下具有完全相同的性能。
黑洞引力波探测仪LISA计划及科学目标

黑洞引力波探测仪LISA计划及科学目标引力波的发现是物理学领域的一大突破,它源自于爱因斯坦的广义相对论理论。
随着科学技术的不断进步,人类成功地探测到了引力波存在的证据,并确定了其对黑洞的研究具有重要意义。
黑洞引力波探测仪(Laser Interferometer Space Antenna,LISA)计划正是为了进一步探测并研究黑洞引力波而设立的。
LISA计划是一个有欧洲空间局(ESA)领导的国际合作项目,旨在发射多个卫星组成的探测器阵列,以探测和研究超大质量黑洞、中等质量黑洞和相对论致密星(如中子星等)等天体产生的引力波。
通过获得具有广阔频率范围和高灵敏度的引力波观测数据,LISA计划将为我们提供更加深入的了解黑洞和宇宙的奇观。
LISA计划的科学目标旨在通过引力波探测研究黑洞、星体演化以及宇宙的起源、演化等重要问题。
其中,探测超大质量黑洞是LISA计划的重要任务之一。
超大质量黑洞是宇宙中最为庞大和强大的天体,其引力波的产生对于研究宇宙结构和演化有着重要意义。
通过LISA计划的观测,我们可以获得关于超大质量黑洞的质量、旋转状态、合并过程等重要信息,从而推测宇宙中黑洞的形成机制、生长过程以及宇宙早期的演化。
此外,LISA计划还将重点关注中等质量黑洞的探测和研究。
中等质量黑洞大致介于恒星质量黑洞和超大质量黑洞之间,尚不为人们所熟知。
它们的形成过程和性质对于理解星体演化和宇宙起源具有重要的意义。
通过LISA计划的观测,我们可以研究这些神秘的中等质量黑洞的形成机制、合并过程以及它们对星系演化的影响。
最后,LISA计划还将探索引力波源的丰富多样性,例如相对论致密星(如中子星)、白矮星和双星系统等。
这些致密天体在宇宙中很常见,对于理解宇宙演化、核物理以及引力相互作用等方面都具有重要意义。
LISA计划将通过对这些天体产生的引力波的探测和分析,揭示它们的性质和演化历史,进一步拓宽人类对宇宙的了解。
为了实现这些科学目标,LISA计划将发射三枚卫星组成的探测器阵列。
北京太赫兹工作原理

北京太赫兹工作原理
北京太赫兹是一种基于太赫兹波段技术开发的公司,主要提供太赫兹技术解决方案和设备供应服务。
太赫兹波段是介于微波和红外光之间的电磁波频段,频率范围在0.1~10THz之间。
这个频率范围具有许多独特的物理特性,具有不透明、穿透、吸收等特性,可应用于无损检测、安检、医疗、通信等领域。
北京太赫兹的工作原理主要是基于太赫兹晶体电路的设计,通过太赫兹谐振器的共振产生太赫兹波,经过太赫兹光学元件、探测器等器件反射、透过、吸收等现象产生太赫兹信号,并通过信号处理算法进行数据分析,实现对被检测物体的检测和诊断。
由于太赫兹波段具有较高的灵敏度、分辨率和可操作性,可在各种领域中应用,前景广阔。
ICIP-P8405-IR 8MP 40x Starlight IR PTZ 网络摄像头说明书

ICIP-P8405-IR8MP 40x Starlight IR PTZ Network Camera●1/1.8” 8 Megapixel STARVIS™ CMOS ●Powerful 40x optical zoom ●Starlight technology ●Max. 25/30fps@4K ●Support Hi-PoE ●Smart wiper●IR distance up to 450m ●IP67Starlight TechnologyFor challenging low-light applications, Starlight Ultra-low Light Technology offers best-in-class light sensitivity, capturing color details in low light. The camera uses a set of optical features to balance light throughout the scene, resulting in clear images in dark environments.Wide Dynamic Range (WDR)The camera achieves vivid images, even in the most intensecontrast lighting conditions, using industry-leading wide dynamic range (WDR) technology. For applications with both bright and low lighting conditions that change quickly, true WDR (120 dB) optimizes both the bright and dark areas of a scene at the same time to provide usable video.Auto-trackingImagine a PTZ that controlled itself - one that moved when objects came within the image, and Panned, Tilted and Zoomed on the target automatically. IVS cameras that support Auto Tracking can have a defined 'home' position (called a scene) where the camera will await an object to enter a specified quadrant.Featuring powerful optical zoom and accurate pan/tilt/zoom performance, this camera provides an all-in-one solution for capturing long distance video surveillance for outdoorapplications. Together with infrared illumination and Starlight Technology, the camera is the perfect solution for dark, low light applications. The series combines a day/night mechanical IR cut filter for the highest image quality in variable lighting conditions during the day, and True WDR for applications with direct sunlight or glare.System OverviewFunctionsSmart H.265+Deliver high quality video without straining the network, Smart H.265+ is the optimized implementation of H.265. The Smart H.265+ encoding technology includes a scene adaptive encoding strategy, dynamic GOP, dynamic ROI, flexible multi-frame reference structure and intelligent noise reduction, providing saving of up to 70% of bandwidth and storage when compared with standard H.265PFA TechnologyPFA technology has innovatively introduced new methods ofjudgment to ensure the accuracy and predictability of the direction of subject distance adjustment. The result is a set of advanced focusing algorithms. PFA ensures clarity of the image throughout the process of zooming and shortens focus time. The realization of PFA technology substantially improves user experience and increases product value.EnvironmentalThe cameras operate in extreme temperature environments, rated for use in temperatures from -40°C ~ 70°C (-40°F ~ +158°F) with 95% humidity. Subjected to rigorous dust and water immersion tests and certified to the IP67 Ingress Protection rating makes it suitable for demanding outdoor applications. For environments with rain, sleet, snow and fog, an integrated wiper provides users with clear visibility at all times.ProtectionThe camera allows for ±25% input voltage tolerance, suitable for the most unstable conditions for outdoor applications. Its 8KV lightning rating provides effective protection for both the camera and its structure against lightning.InteroperabilityThe camera conforms to the ONVIF (Open Network VideoInterface Forum) specifications, ensuring interoperability between network video products regardless of manufacturer.Technical SpecificationImage Sensor 1/1.8” STARVIS™ CMOS Effective Pixels 3840(H) x 2160(V), 8 Megapixels RAM/ROM1024M/128M Scanning System Progressive Electronic Shutter Speed 1/1s~1/30,000s Minimum Illumination Color:*************;B/W:**************;*********(IRon)IR Distance Distance up to 450m (1476ft)IR On/Off Control Auto / Manual IR LEDs 10WiperSupportLens Type 5.6mm~223mm Max. Aperture F1.4~ F4.8Angle of View H: 63.9°~2.0°; V: 37.3°~1.1° Optical Zoom 40xFocus Control Auto/Manual Close Focus Distance100mm~ 1000mm DORI DistanceDetectObserve Recognize Identify 4400m 1740m 880m 440m 14435ft5708ft2887ft1443ftLensCameraPan/Tilt Range Pan: 0° ~ 360° endless; Tilt: -20° ~ 90°,auto flip 180°Manual Control Speed Pan: 0.1° ~240° /s; Tilt: 0.1° ~100° /s Preset Speed Pan: 240° /s; Tilt: 120° /s Presets 300PTZ Mode 5 Pattern, 8 Tour, Auto Pan ,Auto ScanSpeed Setup Human-oriented focal Length/ speed adaptation Power up Action Auto restore to previous PTZ and lens status after power failureIdle Motion Activate Preset/ Scan/ Tour/ Pattern if there is no command in the specified period ProtocolICR-SD, Pelco-P/D (Auto recognition)PTZEvent Trigger Motion detection, Video tampering , Scene changing, Network disconnection, IP address conflict, Illegal Access, Storage anomaly Auto Tracking SupportIVSTripwire, Intrusion, Abandoned/Missing Object Advanced Intelligent FunctionsFace Detection, Heat MapIntelligenceCompression H.265+/H.265/H.264+/H.264Streaming Capability 3 StreamsResolution4K(3840x2160)/1080P(1920×1080)/1.3M(1280x 960)/720P(1280×720)/D1(704×576/ 704×480)/CIF(352×288/352×240)Frame RateMain stream: 4K(1~25/30fps), 1080P/1.3MP/720P (1~25/30fps)Sub stream1: D1/CIF(1 ~ 25/30fps)Sub stream2: 1080P/1.3M/720P (1 ~ 25/30fps)Bit Rate ControlCBR/VBRVideoBit Rate H.265/H.264: 448K ~ 8192Kbps Day/NightAuto(ICR) / Color / B/W Backlight Compensation BLC / HLC / WDR(120dB)White Balance Auto, ATW, Indoor, Outdoor, Manual Gain Control Auto / Manual Noise Reduction Ultra DNR (2D/3D)Motion Detection Support Region of InterestSupport Electronic Image Stabilization (EIS)Support Defog Support Digital Zoom 16x Flip180°Privacy MaskingUp to 24 areasCompressionG.711a/G.711mu/PCM/G.726/AAC/G722.1/G.729/MPEG2-Layer2AudioEthernet RJ-45 (10Base-T/100Base-TX)ProtocolIPv4/IPv6, HTTP, HTTPS, SSL, TCP/IP, UDP, UPnP,ICMP, IGMP, SNMPv1/v2c/v3(MIB-2), ARP, RTCP,RTSP, RTP, SMTP, NTP, DHCP, DNS,PPPOE,DDNS,FTP, IP Filter,QoS,Bonjour,802.1x Interoperability ONVIF Profile S&G, CGI Streaming Method Unicast / Multicast Max. User Access20 usersEdge Storage NAS (Network Attached Storage),Local PC for instant recording, Micro SD card 256GB Web ViewerIE, Chrome, Firefox, Safari Management Software SmartICRSS, DSS Smart PhoneIOS, AndroidNetworkCertificationsCE: EN55032/EN55024/EN50130-4FCC: Part15 subpartB,ANSI C63.4- 2014UL: UL60950-1+CAN/CSA C22.2,No.60950-1CertificationsVideo Interface 1 port(BNC, 1.0V[p-p], 75Ω)Audio Interface1/1 channel In/Out RS4851Alarm I/O7/2InterfacePower Supply AC24V/3A(±25%), Hi-PoE Power Consumption26W, 38W (IR on, Heater on)ElectricalOperating Conditions -40° C ~ +70° C (-40° F ~ +158° F) / Less than 95% RH Storage Conditions -40° C ~ +70° C (-40° F ~ +158° F) / Less than 95% RH Ingress Protection IP67Vandal ResistanceN/AEnvironmentalCasing MetalDimensions Φ262mm x 415.6mm (10.31” x 16.36”)Net Weight 8.5kg(18.74lb)Gross Weight14.3kg(31.53lb)ConstructionAccessories Dimensions (mm/in)。
Hikvision HD2-PTZ-20X-IR 2 Megapixel 25x Starlight
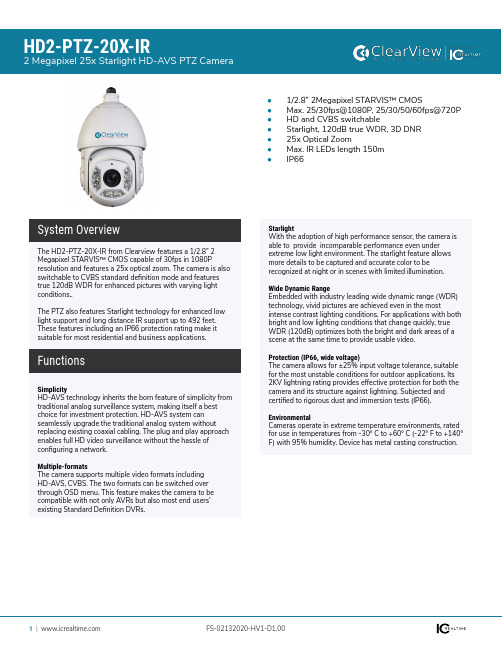
HD2-PTZ-20X-IR2 Megapixel 25x Starlight HD-AVS PTZ Camera●1/2.8” 2Megapixel STARVIS™ CMOS●Max. 25/30fps@1080P, 25/30/50/60fps@720P ●HD and CVBS switchable●Starlight, 120dB true WDR, 3D DNR ●25x Optical Zoom●Max. IR LEDs length 150m ●IP66SimplicityHD-AVS technology inherits the born feature of simplicity from traditional analog surveillance system, making itself a best choice for investment protection. HD-AVS system can seamlessly upgrade the traditional analog system without replacing existing coaxial cabling. The plug and play approach enables full HD video surveillance without the hassle of configuring a network.Multiple-formatsThe camera supports multiple video formats including HD-AVS, CVBS. The two formats can be switched over through OSD menu. This feature makes the camera to be compatible with not only AVRs but also most end users’ existing Standard Definition DVRs.The HD2-PTZ-20X-IR from Clearview features a 1/2.8” 2 Megapixel STARVIS™ CMOS capable of 30fps in 1080Presolution and features a 25x optical zoom. The camera is also switchable to CVBS standard definition mode and features true 120dB WDR for enhanced pictures with varying light conditions..The PTZ also features Starlight technology for enhanced low light support and long distance IR support up to 492 feet. These features including an IP66 protection rating make it suitable for most residential and business applications.System OverviewFunctionsStarlightWith the adoption of high performance sensor, the camera is able to provide incomparable performance even under extreme low light environment. The starlight feature allows more details to be captured and accurate color to be recognized at night or in scenes with limited illumination.Wide Dynamic RangeEmbedded with industry leading wide dynamic range (WDR) technology, vivid pictures are achieved even in the mostintense contrast lighting conditions. For applications with both bright and low lighting conditions that change quickly, true WDR (120dB) optimizes both the bright and dark areas of a scene at the same time to provide usable video.Protection (IP66, wide voltage)The camera allows for ±25% input voltage tolerance, suitable for the most unstable conditions for outdoor applications. Its 2KV lightning rating provides effective protection for both the camera and its structure against lightning. Subjected and certified to rigorous dust and immersion tests (IP66).EnvironmentalCameras operate in extreme temperature environments, rated for use in temperatures from -30° C to +60° C (-22° F to +140° F) with 95% humidity. Device has metal casting construction.Technical SpecificationImage Sensor 1/2.8” STARVIS™ CMOS Effective Pixels 1920(H) x 1080(V), 2 Megapixels Scanning System ProgressiveElectronic Shutter SpeedPAL: 1/3s~1/30,000s NTSC: 1/4s~1/30,000sMinimum Illumination Color:*************;B/W:**************;*********(IRon)S/N Ratio More than 55dBIR Distance Distance up to 150m (492ft)IR On/Off Control Auto/Manual IR LEDs6Lens Type 4.8mm~120mm Max. Aperture F1.6 ~ F4.4Angle of View H: 62.8° ~ 2.6°Optical Zoom 25xFocus Control Auto / Manual Close Focus Distance100mm~ 1000mm DORI Distance DetectObserve Recognize Identify 1613m 646m 323m 161m 5259ft2119ft1060ft528ftLensCameraPan/Tilt Range Pan: 0° ~ 360° endless; Tilt: -15° ~ 90°,auto flip 180°Manual Control Speed Pan: 0.1° ~160° /s; Tilt: 0.1° ~120° /s Preset Speed Pan: 240° /s; Tilt: 200° /s Presets 300PTZ Mode 5 Pattern, 8 Tour, Auto Pan, Auto ScanSpeed Setup Human-oriented focal Length/ speed adaptationPower up Action Auto restore to previous PTZ and lens status after power failureIdle Motion Activate Preset/ Scan/Tour/ Pattern if there is no command in the specified periodProtocolICR-SD, Pelco-P/D (Auto recognition)Pan/Tilt/RotationResolution 1080P(1920×1080)/720P(1280×720)Frame Rate 25/30fps@1080P, 25/30/50/60fps@720P Video Output 1-channel BNC high definition video output/ CVBS standard definition video output (switchable)Day/Night Auto(ICR) / Color / B/W OSD Menu SupportBLC Mode BLC / HLC / WDR(120dB)White Balance Auto, ATW, Indoor, Outdoor, Manual Gain Control Auto / Manual Noise Reduction Ultra DNR (2D/3D)Digital Zoom 16x Flip180°Privacy MaskingUp to 24 areasVideoCertificationsCE: EN55032/EN55024/EN50130-4FCC: Part15 subpartB,ANSI C63.4- 2014UL: UL60950-1+CAN/CSA C22.2,No.60950-1CertificationsVideo Interface 1Audio Interface 1 channel in RS4851Alarm I/O2/1InterfacePower Supply AC24V/3A(±10%)Power Consumption13W, 23W (IR on)ElectricalOperating Conditions -40°C ~ 60°C (-40°F ~ +140°F) / Less than 95% RH Ingress ProtectionIP66EnvironmentalCasing MetalDimensions 205(mm) x 336(mm)Net Weight 5kg(11.02lb)Gross Weight8.3kg(18.30lb)ConstructionAccessories Dimensions (mm/in)。
FrSky 2.4GHz ACCST Taranis Q X7S 说明书
Step 1: Set the Mode for Taranis Q X7S Internal RF Refer to the table below and set the Taranis Q X7S to the mode corresponding to your receiver (D8, D16 or LR12).
Notice: The above instructions do not apply to D-series receivers, which require the internal RF module of Taranis Q X7S to be in D8 mode. For these receivers, failsafe must be set on the receiver side (see receiver instructions)
Step 3: Set the Receiver Number When you create a new model, the system will assign you a receiver number automatically, but this can be easily changed. The range of the receiver number is 00-63, with the default number being 01 (use 00 is not recommended). Once the receiver is set to the desired number and is bound to the Taranis Q X7S, the bind procedure will not need to be repeated unless the receiver number is changed, In this case, either set the receiver number to the previous one or repeat the bind procedure.
SIGLENT SDS1000X系列超级荧光示波器数据手册说明书

3 0 . 9 1 0 2 -册手据数SDS1000X 系列超级荧光示波器数据手册产品综述SDS1000X 系列超级荧光示波器,拥有50M、70M、100MHz 和200MHz 带宽机型,采样率1GSa/s,标配存储深度达14Mpts,最常用功能都采用人性化的一键式设计。
SDS1000X 采用SPO 技术,具有优异的信号保真度:底噪低于业内同类产品,最小量程只有500μV /div; 创新的数字触发系统,触发灵敏度高,触发抖动小;波形捕获率高达400,000帧/秒(Sequence 模式),具有256级辉度等级及色温显示;支持丰富的智能触发、串行总线触发和解码;支持历史模式(History)、顺序模式(Sequence)和增强分辨率模式(Eres);具备丰富的测量和数学运算功能;集成25MHz 任意波形发生器,是一款高性能经济型通用示波器。
特性与优点通道带宽:50MHz,70MHz,100MHz,200MHz 实时采样率高达1GSa/s 新一代SPO 技术•波形捕获率达60,000帧/秒(正常模式) 400,000帧/秒(Sequence 模式)•支持256级波形辉度及色温显示•存储深度达14Mpts •数字触发系统智能触发:边沿(Edge)、斜率(Slope)、脉宽(Pulse width)、窗口(Window)、欠幅(Runt)、间隔(Interval)、超时(Dropout)、码型(Pattern)串行总线触发和解码,支持的协议I 2C、SPI、UART/RS232、CAN、LIN视频触发,支持HDTV优异的本底噪声,电压档位低至500μV /div 创新10种一键快捷操作,支持Auto Setup、Default、Cursors、Measure、Roll、History、Persist、Clear Sweeps 、Math 和Print顺序模式(Sequence),最大可以将存储深度等分为80,000段,根据用户设置的触发条件,以非常小的死区时间分段捕获符合条件的事件历史模式(History),最大可记录80,000帧波形37种自动测量功能,支持测量统计、Gating 测量、Math 测量、History 测量、Ref 测量波形运算功能(FFT、加、减、乘、除、积分、微分、平方根)硬件实现的高速Pass/Fail 功能25MHz DDS 任意波形发生器,内置10种波形(SDS1000X-S 机型配备)8英寸TFT-LCD 显示屏,分辨率800*480丰富的接口:USB Host、USB Device(USBTMC)、LAN (VXI-11)、Pass/Fail、Trigger Out、GPIB(选配)支持丰富的SCPI 远程控制命令多国语言显示及嵌入式在线帮助SDS1000X 系列超级荧光示波器数据手册设计特色8英寸彩色宽屏和10种一键操作SDS1000X 配备8英寸TFT-LCD 显示屏,分辨率800*480SDS1000X 把用户最常用的功能做成了一键操作,共计10种,分别为Auto Setup、Default、Cursors、Measure、Roll、History、Persist、Clear Sweeps、Math 和PrintSDS1000X 系列超级荧光示波器数据手册波形捕获率高达400,000帧/秒丰富的触发功能串行总线解码功能(选配)最大存储深度达14Mpts256级辉度等级及色温显示高达400,000 帧/秒的波形捕获率(Sequence 模式),使示波器能轻松捕获到异常事件或低概率事件SPO 显示技术是高刷新率和多帧叠加的结果,当单位时间内,当某一像素点出现的波形概率越高,该像素点就越亮,反之越暗具有丰富的触发功能,包括边沿、斜率、脉宽、视频、窗口、欠幅、间隔、超时、码型、I 2C、SPI、UART/RS232、LIN、CAN通过事件列表显示解码结果, 能快速、直观地将总线的协议信息以表格形式显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a r X i v :a s t r o -p h /0010072v 3 20 D e c 2000Discovery of a 270Hz X-Ray Burst Oscillation in the X-Ray Dipper4U 1916−053Duncan K.Galloway,Deepto Chakrabarty,Michael P.Muno,and Pavlin SavovCenter for Space Research and Department of Physics,Massachusetts Institute of Technology,Cambridge,MA 02139duncan,deepto,muno,pavlin@ Accepted for The Astrophysical Journal Letters ,2000Dec 20ABSTRACT We report the discovery of a highly coherent oscillation in a type-I X-ray burst ob-served from 4U 1916−053by the Rossi X-ray Timing Explorer (RXTE ).The oscillation was most strongly detected ≈1s after the burst onset at a frequency of 269.3Hz,and it increased in frequency over the following 4seconds of the burst decay to a maximum of ≃272Hz.The total measured drift of 3.58±0.41Hz (1σ)represents the largest fractional change in frequency (1.32±0.15%)yet observed in any burst oscillation.If the asymptotic frequency of the oscillation is interpreted in terms of a decoupled surface burning layer,the implied neutron star spin period is around 3.7ms.However,the expansion of the burning layer required to explain the frequency drift during the burst is around 80m,substantially larger than expected theoretically (assuming rigid rotation).The oscillation was not present in the persistent emission before the burst,nor in the initial rise.When detected its amplitude was 6–12%(RMS)with a roughly sinusoidal profile.The burst containing the oscillation showed no evidence for photo-spheric radius expansion,while at least 5of the other 9bursts observed from the source by RXTE during 1996and 1998did.No comparable oscillations were detected in theother bursts.A pair of kilohertz quasi-periodic oscillations (QPOs)has been previously reported from this source with a mean separation of 348±12Hz.4U 1916−053is the first example of a source where the burst oscillation frequency is significantly smaller than the frequency separation of the kHz QPOs.Subject headings:accretion,accretion disks —stars:individual (4U 1916−053)—stars:neutron —X-rays:bursts1.IntroductionType I X-ray bursts are signatures of unstable nuclear burning on the surface of accreting neutron stars (see Lewin,van Paradijs,&Taam 1995and Bildsten 1998for recent reviews).Strongevidence for surface brightness anisotropies during the bursts comes from observations of highly coherent‘burst oscillations’in7sources to date(Strohmayer et al.1996;see also van der Klis2000 and references therein).These oscillations have been suggested to result from initially localized nuclear burning,which spreads over the surface of the neutron star during the early stages of the burst(Strohmayer et al.1996).As the burst evolves,the oscillations typically increase in frequency by a few Hz;in X1658−298the increase is≈5Hz,the greatest increase seen so far (Wijnands et al.2000).This frequency drift may occur as a consequence of the burning layer becoming decoupled from the star(Strohmayer et al.1997;Cumming&Bildsten2000).In several sources the oscillation approaches an asymptotic frequency that may be the spin frequencyνspin of the neutron star.Although many observational characteristics of burst oscillations seem to be consistent with this picture,a growing body of observations points to a substantially more complex underlying mechanism(ler1999;Strohmayer et al.2000).In this Letter we report the discovery of a new burst oscillation in4U1916−053.The low-mass X-ray binary(LMXB)4U1916−053(l=31.4◦,b=−8.5◦)was discovered by the Uhuru satellite in1977(Forman et al.1978).EXOSAT observations revealed irregular X-ray dipping behavior with a period of≈50min(Walter et al.1982;White&Swank1982),which optical observations of the m V=21companion confirmed was approximately the orbital period (Grindlay et al.1988).Analysis of RXTE observations during1996shows that the source is a member of the‘atoll’class(Bloser et al.2000;Boirin et al.2000).Both high( 100Hz)and low frequency QPOs were detected in the power spectra of the source as measured by RXTE.In particular,a pair of high-frequency QPOs(‘kilohertz QPOs’)with a mean separation of348±12Hz was simultaneously detected onfive occasions(Boirin et al.2000).On four of these occasions,the observed separation was consistent with the mean value,but on one occasion was only290±5Hz. X-ray bursts exhibiting photospheric radius expansion resulting from super-Eddington luminosities indicate a source distance of8.4–10.8kpc(Smale et al.1988).The X-ray bursts observed by RXTE during1996were searched for high-frequency oscillations,but none were found to a3σlimit of3% RMS amplitude(Boirin et al.2000).Here we present the results of a more comprehensive timing study of X-ray bursts in4U1916−053observed by RXTE,including both the previously analyzed 1996data and more recent observations made during1998.2.Observations and Analysis4U1916−053was observed using the RXTE Proportional Counter Array(PCA;Jahoda et al. 1996)throughout1996and during1998June–August.These observations comprise40separate pointings with a total exposure time of323ks.The data were screened to exclude earth occulta-tions and intervals of unstable pointing,with the maximum allowed offset0.01◦.A search of the Standard1mode data(2–60keV,0.125s time resolution,no energy resolution)revealed four typeI bursts during1996and six during19981(see Table1).It is possible that one or more of the observed bursts originated from a source other than4U1916−053in the PCAfield(FWHM=1◦). The nearest(≈1◦)known source from the Simbad catalog(http://simbad.u-strasbg.fr/Simbad) is RXS192242.1-051559,from which no bursts have been reported.We consider the likelihood of an unknown bursting source within the PCAfield of view at this relatively high Galactic latitude remote.As already noted by Chou et al.(2000),the1996bursts are clustered in binary phase near the X-ray dip.Interestingly,the1998bursts do not show the same evidence for clustering, although the Chou et al.ephemeris still correctly predicts the X-ray dip times in the1998data.The burst profiles typically exhibit a broad and somewhatflat-topped peak,often followed by one or more narrow dips during the decay.Uninterrupted PCA data from high-time-resolution modes(typically the E64M1s mode with122µs time resolution and64channel energy resolution)were available for8of the10bursts observed.The spectral characteristics of these bursts were measured byfitting absorbed blackbody spectra in the2.5–40keV range to0.25s segments of data covering the burst.Spectralfitting was undertaken with xspec version11(Arnaud1996).A spectrum extracted from a short interval of data immediately before the burst was used as the background.Five of the bursts showed an increase in thefitted blackbody radius coupled with a decrease in the effective temperature during thefirst10s.This strongly suggests that photospheric radius expansion occurred during these bursts.No evidence for radius expansion was found for the bursts on1998July24,August1,and August10.Sub-intervals of the high–time-resolution data covering each of the bursts were searched for oscillations in the0–4000Hz range.We computed8×oversampled Fourier power spectra for0.5s lengths of data spaced at0.25s intervals and searched for statistically significant pulsed signals.A strong,highly significant(chance probability for2000independent frequencies5×10−6,equivalent to4.6σ)oscillation atνburst≈270Hz was detected0.75s after the burst rise during the1998August 1burst(Figure1).Weaker oscillations were measured at a gradually increasing frequency over the next≈5s,except for the interval between2and3s following the burst rise when no significant oscillation was detected in the220–320Hz range(Figure2a).When the oscillation reappeared3s after the burst rise,we initially detected two peaks of approximately equal strength separated by ≈3Hz,although clearly only one was consistent with the continuing evolution of the initial signal. We note that the presence of two closely separated peaks has also been observed in4U1636−536 (Miller2000).The oscillation was not detected in the persistent emission prior to the burst,nor during the burst rise itself.The frequency and RMS amplitude for the oscillation corresponding to each peak was measured from the oversampled Fourier power spectra(e.g.Middleditch&Nelson 1976).The difference between the initial andfinal frequencies at which the oscillation was detected (268.45±0.34and272.03±0.24Hz respectively)was3.58±0.41Hz(1σerror;Figure2b).The RMSamplitude for the full PCA energy range(2–60keV)peaked at≈12%around1s following the burst rise,and then decreased within0.5s to unmeasurable levels.When the oscillation returned≈3s following the burst rise,the measured amplitude was in the6–11%range.The RMS amplitudes were also calculated in the2–8and8–20keV energy ranges separately.The amplitude was generally significantly greater in the8–20keV energy band,at6–12%.However,at times the amplitude in the2–8keV band reached that of the higher energy band,suggesting spectral variations in the pulsed emission.We note that when two significant peaks close to270Hz were measured in the Fourier spectrum(at around2.5s following the burst onset)only the higher frequency oscillation was present to a significant level in the8–20keV energy band.The pulse profile was generally consistent with a sinusoid.No significant persistent oscillations were observed in the other9bursts detected from the source in1996and1998.A more sensitive search was undertaken on those bursts by averaging power spectra over1s segments of data within intervals of varying length covering the burst peak, but this too resulted in no detections.In several of the bursts(1996August16in particular), peaks representing detections at>90%confidence around256or270Hz were found in single power spectra as early as2s prior to the burst or coincident with the burst rise.These peaks did not persist for more than0.5s,nor were they as significant in power spectra of longer stretches of data.The most significant peak(3σequivalent for4000independent frequencies)was found in both the0.5and1s power spectra around4s before the1996August16burst,with frequency 278.01±0.07Hz(1σ)and estimated RMS amplitude24%.We include these results for completeness; without repeated detections or greater significance their authenticity is questionable.3.DiscussionWe have conclusively detected a highly coherent≃270Hz oscillation during a type I X-ray burst from4U1916−053,bringing the total number of known burst oscillation sources to eight. If we interpret the frequency evolution of the oscillation during the burst in terms of a decoupled burning layer,then the maximum observed frequency implies a neutron star spin period of≈3.7ms. However,the large change in frequency during this burst(3.58±0.41Hz or1.32±0.15%)would require an≈80m expansion of the burning layer(assuming rigid rotation).The maximum peak flux of all the bursts observed is a lower limit to the Eddingtonflux F Edd for the source,in which case the peakflux for the1998August1burst(in which the burst oscillation was observed)is at most0.5F Edd.The maximum expansion predicted for a mixed H/He burst at thisflux level is only20m(Cumming&Bildsten2000),different from our measurement at the7σlevel.That the binary period of the source is shorter than80min indicates that the mass donor must be very hydrogen-poor(Nelson et al.1986),suggesting a predominantly He burning layer.Interestingly, Cumming&Bildsten(2000)predict an even smaller expansion in that case.The limited sample available suggests that burst oscillations in4U1916−053are more likely to be present in atypically weak bursts which do not exhibit photospheric radius expansion(see Table1).The other twosources with∼300Hz burst oscillations(4U1728−34and4U1702−429)also show this tendency, while the sources with higher frequency oscillations behave in a distinctly different manner(Muno et al.2001,in preparation).In the four burst sources from which both a kHz QPO pair and a burst oscillation were previously known,the burst oscillation frequencyνburst is comparable to(or else nearly twice)the peak separation of the kHz QPOs∆ν(see Table2).Precise measurements of∆νhave been made for two of these sources,and these detailed measurements show clearly thatνburst n∆νwith n=1or2.(1) (M´e ndez et al.1998;M´e ndez&van der Klis1999).For the other two sources,one can only conclude that∆νandνburst are equal within their uncertainties.The relationship betweenνburst and∆νgiven in(1)has been interpreted in terms of a beat frequency model for the kHz QPOs(Strohmayer et al.1996;Miller,Lamb,&Psaltis1998).In the original sonic-point beat frequency model of Miller et al.(1998),the upper kHz QPO appears at the Keplerian frequency of the accretionflow’s sonic point,and the lower kHz QPO appears at the beat between this frequency andνs.In this simple picture,we expect∆ν=νspin.More recent calculations by Lamb&Miller(2000)have shown that the accreting material’s inward drift decreases the upper kHz QPO frequency below the sonic point’s Keplerian frequency and increases the lower kHz QPO frequency above the beat frequency, resulting in∆ν νspin.This is consistent with the observed relation(1)if we haveνburst≈nνspin with n=1or2,as in the decoupled burning layer model for the burst oscillations.Our study of4U1916−053has revealed thefirst example of a source whereνburst<∆νto high significance( 7σfor the range of values of∆νreported in Boirin et al.2000).It is unclear how to understand this result in terms of the sonic point model,which would require the frequency of the upper kHz QPO to be higher than the Keplerian orbital frequency in order to match our observation.The numerical simulations presented by Lamb&Miller(2000)do not show this trend,but such a possibility cannot be excluded a priori.A different explanation for the kHz QPOs involving relativistic precession of the accretion disk has also been proposed.Here,the upper kHz QPO appears at the Keplerian frequency at some characteristic disk radius,and the lower kHz QPO occurs at the periastron precession frequency at the same radius(Stella&Vietri1998;Psaltis &Norman2000).In this picture,∆νis approximately equal to the radial epicyclic frequency and is not inherently related toνspin,so that the striking observed similarity betweenνburst and∆ν(or2∆ν)is not explicitly addressed.An additional model is therefore required to understand the burst oscillations in conjunction with the relativistic precession models for the kHz QPOs.The requirements for such a model have been discussed,although none has yet been developed quantitatively.If we assume thatνburst≈νspin,then it must be thatνspin is driven towards the maximum epicyclic frequency(Stella1999)or else that the kHz QPOs only reach detectable amplitudes when∆ν≈νspin or∆ν≈νspin/2due to a resonance effect(Psaltis2000)Alternatively,νburst might not be related toνspin at all,but might instead be related to an accretion disk mode that occurs near the maximum epicyclic frequency at the innermost stable orbit(Titarchuk et al.1998;Psaltis&Norman2000),such as the g-modes predicted in the case of accreting black holes (see e.g.Kato1990;Nowak&Wagoner1991).Unfortunately,the absence of a detailed link between the burst oscillations and the relativistic precession model makes it impossible to constrain this model using our results.We thank Ed Morgan and Dimitrios Psaltis for useful discussions,and Josh Grindlay for making a source ephemeris available prior to publication.This work was supported in part by the NASA Long Term Space Astrophysics program under grant NAG5-9184.REFERENCESArnaud,K.A.1996,in Astronomical Data Analysis Software and Systems V,ed.G.Jacoby& J.Barnes(San Fransisco:ASP Conf.Ser.101),17Bildsten,L.1998,in The Many Faces of Neutron Stars,ed.R.Buccheri,J.van Paradijs,&A.Alpar (Dordrecht:Kluwer),419Bloser,P.F.,Grindlay,J.E.,Barret,D.,&Boirin,L.2000,ApJ,542,989Boirin,L.,Barret,D.,Olive,J.F.,Bloser,P.F.,&Grindlay,J.E.2000,A&A,361,121Chou,Y.,Grindlay,J.E.,&Bloser,P.F.2000,ApJ,accepted(astro-ph/0010465)Cumming,A.&Bildsten,L.2000,ApJ,544,453Forman,W.,Jones,C.,Cominsky,L.,Julien,P.,Murray,S.,Peters,G.,Tananbaum,H.,& Giacconi,R.1978,ApJS,38,357Grindlay,J.E.,Bailyn,C.D.,Cohn,H.,Lugger,P.M.,Thorstensen,J.R.,&Wegner,G.1988, ApJ,334,L25Jahoda,K.,Swank,J.H.,Giles,A.B.,Stark,M.J.,Strohmayer,T.,Zhang,W.,&Morgan,E.H.1996,Proc.SPIE,2808,59Kato,S.1990,PASJ,42,99Lamb,F.K.&Miller,M.C.2000,ApJ,submitted(astro-ph/0007460)Lewin,W.H.G.,van Paradijs,J.,&Taam,R.E.1995,in X-ray Binaries,ed.W.H.G.Lewin, J.van Paradijs,&E.P.J.van den Heuvel(Cambridge:Cambridge University Press),175 Markwardt,C.B.,Strohmayer,T.E.,&Swank,J.H.1999,ApJ,512,L125M´e ndez,M.&van der Klis,M.1999,ApJ,517,L51M´e ndez,M.,van der Klis,M.,&van Paradijs,J.1998,ApJ,506,L117Middleditch,J.&Nelson,J.1976,ApJ,208,567Miller,M.C.1999,ApJ,515,L77—.2000,ApJ,531,458Miller,M.C.,Lamb,F.K.,&Psaltis,D.1998,ApJ,508,791Nelson,L.A.,Rappaport,S.A.,&Joss,P.C.1986,ApJ,304,231Nowak,M.A.&Wagoner,R.V.1991,ApJ,378,656Psaltis,D.2000,AdSpR,in pressPsaltis,D.&Norman,C.2000,ApJ,submitted(astro-ph/0001391)Smale,A.P.,Mason,K.O.,White,N.E.,&Gottwald,M.1988,MNRAS,232,647Smith,D.A.,Morgan,E.H.,&Bradt,H.1997,ApJ,479,L137Stella,L.1999,Talk at the Aspen Summer Workshop on X-ray Probes of Relativistic Effects Near Neutron Stars and Black Holes,Aspen Center for PhysicsStella,L.&Vietri,M.1998,ApJ,492,L59Strohmayer,T.E.,Giles,A.B.,Wachter,S.,&Hill,K.2000,in Rossi2000:Astrophysics with the Rossi X-ray Timing Explorer.March22-24,2000at NASA’s Goddard Space Flight Center, Greenbelt,MD USA,E71Strohmayer,T.E.,Jahoda,K.,Giles,A.B.,&Lee,U.1997,ApJ,486,355Strohmayer,T.E.&Markwardt,C.B.1999,ApJ,516,L81Strohmayer,T.E.,Zhang,W.,Swank,J.H.,Smale,A.,Titarchuk,L.,Day,C.,&Lee,U.1996, ApJ,469,L9Strohmayer,T.E.,Zhang,W.,Swank,J.H.,White,N.E.,&Lapidus,I.1998,ApJ,498,L135 Titarchuk,L.,Lapidus,I.,&Muslimov,A.1998,ApJ,499,315van der Klis,M.2000,ARA&A,38,717Walter,F.M.,Mason,K.O.,Clarke,J.T.,Halpern,J.,Grindlay,J.E.,Bowyer,S.,&Henry,J.P.1982,ApJ,253,L67White,N.E.&Swank,J.H.1982,ApJ,253,L61Wijnands,R.,Strohmayer,T.,&Franco,L.M.2000,ApJ,submitted(astro-ph/0008526)Wijnands,R.A.D.&van der Klis,M.1997,ApJ,482,L65Frequency (Hz)L e a h y p o w e rL e a h y p o w e ra)b)Fig. 1.—Leahy-normalized power spectrum from RXTE observations of 4U 1916−053on 1998August 1.The 8-times oversampled power spectrum is calculated from 0.5s segments of data,with frequency resolution 0.25Hz.a)Power spectrum from 0.5s segment beginning 0.75s after the start of the burst.The largest peak is at a significance level of 99.99%and indicates a burst oscillation at 269.4Hz.Expected positions of the n =2,3,4harmonics and the first subharmonic are indicated by the arrows.b)Power spectrum for the 0.5s segment beginning 2.5s after the start of the burst.The less significant marked peak is close to the (single)peaks observed in subsequent power spectra.F r e q u e n c y (H z )C o u n t r a t e (c o u n t s /s )a)b)Seconds since start of burstF r e q u e n c y (H z )R M S a m p l i t u d e (%)8−20 keV2−8 keV2−60 keVFig.2.—Time evolution of the oscillation in the 1998August 1burst from 4U 1916−053.(a)Dy-namic power spectrum of the burst oscillation (contours)overplotted on the burst intensity profile (solid line).The contour levels start at a Leahy-normalized power corresponding to 90%-confidence and increase in steps of 5in power.The highest contour level corresponds to a confidence level of >99.99%.(b)Time evolution of the oscillation frequency and RMS amplitudes.The top panel plots νburst calculated from the oversampled Fourier transforms.The three panels below give the RMS amplitude in the full PCA range (2–60keV)and the sub-ranges 2–8and 8–20keV respectively.Error bars represent the 1σuncertainties.Table1.X-Ray Bursts from4U1916−053Start time of burst Peakflux a Radius Oscillation Binary Observation ID(UTC)(10−8erg cm−2s−1)expansion?frequency(Hz)phase ba Bolometricflux calculated according to the blackbody spectralfit parametersb Phase with respect to50min X-ray dip period,with dip phase at0.0.From ephemeris of Chou et al. (2000).Table2.Burst Oscillation Frequencies and kHz QPO Peak Separations Sourceνburst(Hz)∆ν(Hz)Refs.References.—(1)Strohmayer et al.1998;(2)Miller1999;(3)M´e ndez et al.1998;(4)Strohmayer&Mark-wardt1999;(5)Markwardt et al.1999;(6)Strohmayeret al.1996;(7)M´e ndez&van der Klis1999;(8)Smithet al.1997(9)Wijnands&van der Klis1997;(10)Boirinet al.2000;(11)this work.。