论文-基于FPGA的电子稳像平台的研究
基于FPGA的嵌入式稳像系统设计

( , = ( , Y) Y)
() 2
由公式 1 公式 2可 以联立推导如下计算式 : 、
』 r + z+r +- :, y (, ’ t z
【 = /1 +T Y+(2 +t) Y ' 2 2 2 r z 2 3
( 3 )
【 收稿 日期 ]0 0一 2—0 . 21 O 5 [ 作者简介 ] 蔡耀仪 (9 4一 ) 男, 18 , 湖南长沙人 , 中南大学信息科学与工程学院硕士研 究生, 究方向 : 研 图像 处理 。
[[=三[] 妻 [ ] ]三 三 ]+ ] :r + R [
由于图像视频序 列是三 维物体 在二维 平 面的投影 , 此 ), 本文选用 6参 数仿 射模 型从 相邻 帧 图像 中估计 相应 6参数估计模型如 图 1 所示 。
局部运动和 噪声 的干扰 。运 动补偿 模块 主要分 为两种 : 顺 运 动 从 时刻 t 的 坐 标 ( , )运 动 到 时 刻 t 的 坐 标 ( , Y 川 传统基 于“ 像 机一 图像 采集 卡一计 算机 ” 式 的稳 坐 标 点 的变 换 关 系 。 摄 模
第 2期
21 0 0年 3月
湖南人文科技学 院学报
J u n lo n n I s t t fHu n t s c e c n e h oo y o r a fHu a n t u e o ma i e ,S in e a d T c n l g ' i i
No 2 .
・
1 8・ 即 可 以 表示 为 :
湖南 人文 科 技 学 院学 报
总 第 13期 l
其中 i 为图像块 的编号 , 、 y 分别 为对应块 图像 △ △
』‘ 。 6 Y
电子稳像技术算法研究

Abta t sr c :Fisl h a i rn il fee to i ma esa izn e h o o y wa n r d e . Two kid fee to i rty,t e b scp icpeo lcr nc i g t bl ig tc n lg sito uc d i n so lcr n c i g t bl ig ag rt m r n lz d,wh s e i a d d me i we e ito u e n d t i . S c n l ,a lcr n c ma e sa izn lo i i h we ea ay e o em rt n e rt r n r d c d i eal s e o d y n ee to i i a esa l a ina g rt m a e n i g e t r swa r p s d,a d t e b scse sd tc ino ma efa u e , m g tbiz to lo i i h b s d o ma ef au e sp o o e n h a i t pwa ee to fi g e t r s e tma in o ma emo in v co n y fi a ec m p sto r eald s i to fi g to e t ra d wa so g o o i n we ed t i .Glb t n v co ew e n t er fr m i e o e mo i e t rb t e h ee — o
O 引 言
随着 计算 机技术 和 大规模集 成 电路 的迅猛 发展 , 算 计
载体 的运 动导 致 了车载 图像序 列 的不 稳定 , 尤其 当路 面 颠
簸不平造成车体振动剧烈 , 或是采用长焦距、 高分辨力的 摄像系统时, 图像序列晃动量较大 , 易使观察者产生疲劳, 从而导致误判和漏判 , 极大地影响了目标跟踪的精度 。在 航载和舰载图像跟踪系统中, 支撑摄像机平台的震动会引 起 图像画面的抖动, 令观察者视觉疲劳 , 从而产生漏警和 虚警 , 因此必须对图像序列进行稳定 。电子稳像技术具有 实时性强、 体积小巧等优点, 从而得以广泛应用 , 国外在该 领域的研究已有近 2 年的历史 , O 而国内起步相对较晚。
基于FPGA芯片的功能仿真平台构建及静态时序分析的开题报告

基于FPGA芯片的功能仿真平台构建及静态时序分析的开题报告一、研究背景FPGA(Field Programmable Gate Array)是可编程逻辑门阵列,常用于数字电路设计、嵌入式系统设计等领域。
FPGA具有高度的可重构性和并行性,能够满足复杂的计算需求。
而FPGA芯片的设计和验证是非常关键的,因为设计错误可能会导致成本高昂的生产错误和对系统性能的限制。
因此,构建一个基于FPGA芯片的功能仿真平台以及静态时序分析是非常必要的。
二、研究目的本论文的主要目的是构建一个基于FPGA芯片的功能仿真平台,并对平台进行静态时序分析。
具体包括:1.研究FPGA芯片的基础知识和原理,了解FPGA芯片的内部结构和特点,以及在数字电路设计和嵌入式系统设计中的应用。
2.设计和实现基于FPGA芯片的功能仿真平台,包括搭建仿真环境、编写仿真程序、实现仿真功能等,实现仿真过程中的信号显示和时序分析。
3.对仿真平台进行静态时序分析,包括对FPGA芯片的时序特性进行分析、建立时序模型、进行时序约束等。
三、研究内容1. FPGA芯片的基本原理及应用介绍FPGA芯片的基本原理和内部结构,以及在数字电路设计和嵌入式系统设计中的应用。
2. FPGA芯片的功能仿真平台设计和实现设计和实现一个基于FPGA芯片的功能仿真平台,包括搭建仿真环境、编写仿真程序、实现仿真功能等,实现仿真过程中的信号显示和时序分析。
3. FPGA芯片的静态时序分析对仿真平台进行静态时序分析,包括对FPGA芯片的时序特性进行分析、建立时序模型、进行时序约束等。
四、研究方法本论文采用文献研究法、实验研究法和数学建模法。
1.文献研究法对FPGA芯片的基础知识、功能仿真平台设计和静态时序分析等方面进行综合分析,了解其应用现状和发展趋势。
2.实验研究法设计和实现基于FPGA芯片的功能仿真平台,并进行实验验证,实现信号显示和时序分析等功能。
3.数学建模法建立FPGA芯片的时序模型,进行时序分析和约束。
基于FPGA的激光稳频系统的设计与实现

基于FPGA的激光稳频系统的设计与实现基于FPGA的激光稳频系统的设计与实现摘要:随着科技的发展,激光技术被广泛应用于光通信、精密测量、激光雷达等领域。
激光的频率稳定性对于这些应用来说至关重要。
本文基于FPGA技术,设计了一种激光稳频系统,通过对激光器的驱动电流进行自动调整,实现了激光的频率稳定控制。
1. 引言激光技术作为一项重要的光学技术,在现代科技领域中发挥着重要作用。
然而,由于激光器内部元件的温度波动、输运和杂散振动等原因导致激光的频率发生变化,限制了激光技术的应用。
因此,实现激光的稳频成为一个热门的研究课题。
2. 激光稳频系统的设计2.1 系统框架激光稳频系统的设计框架如图1所示。
系统主要由激光器、光电检测模块、控制电路、FPGA芯片和显示器组成。
2.2 激光频率的测量和反馈控制算法为了实现激光频率的稳定,需要对激光的频率进行测量,并根据测量结果进行反馈控制。
本系统中采用了干涉法进行激光频率的测量,通过将激光从激光器分出一部分,在光电检测模块中进行干涉,得到干涉信号的频率信息。
然后,通过FPGA芯片对干涉信号进行处理,计算出激光的频率。
根据设定的目标频率,通过控制电路调整激光器的驱动电流,实现激光频率的稳定控制。
3. 系统实现本系统的核心部分是FPGA芯片的编程。
通过FPGA芯片的灵活性和高效性能,实现了对激光频率的实时测量和控制。
FPGA芯片对干涉信号进行采样和处理,通过锁相环和PID控制算法,计算出激光的频率偏差,并根据反馈信号控制驱动电流的大小以控制激光频率的稳定。
4. 实验结果与分析本文设计的基于FPGA的激光稳频系统在实验中取得了良好的效果。
通过设置目标频率并进行实时测量,系统能够自动调整驱动电流以实现激光频率的稳定控制。
实验结果表明,本系统在不同环境温度下都能够实现激光频率的稳定,稳定性优于传统的激光稳频系统。
5. 总结与展望本文基于FPGA技术设计了一种激光稳频系统,通过对激光器驱动电流的自动调整,实现了激光频率的稳定控制。
论文正文(基于FPGA的实时图像边缘检测的研究)

FPGA(Field Programmable Gate Array)即现场可编程门阵列,是在可编程阵列逻辑PAL(Programmable Array Logic)、门阵列逻辑GAL(Gate Array Logic)、可编程逻辑器件PLD(Programmable Logic Device)等可编程器件的基础上进一步发展的产物[2]。由于拥有ASIC的稳定性、大容量、高集成度等优点,而且采用硬件描述语言所设计的电路可以直接综合成RTL级电路并对目标器件进行配置实现,极大的提高了硬件的设计效率。所以本课题将以此为研究和设计基础,以纯硬件方式实现实时图像处理过程[3]。
Theoretical analysis and the results show that the system architecture is very suitable for real-time image data processing, including read and write dual-portramapproachofping-pongoperation modeas well asthe multi-pipelineprocessorcan be a generalmethods of a follow-up real-time image processing system.
电子稳像中稳像质量评价方法研究
2 0 1 3年 5月
激 光 与 红 外
L AS E R & I NF R ARED
Vo l | 4 3. No . 5
Ma y, 2 01 3
文章编 号 : 1 0 0 1 - 5 0 7 8 ( 2 0 1 3 ) 0 5 - 0 4 7 7 - 0 5
A b s t r a c t : T h e ma i n s u b j e c t i v e a n d o b j e c t i v e i ma g e s t a b i l i z a t i o n e v a l u a t i o n m e t h o d s a r e d e s c i r b e d a n d na a l y z e d . D i f -
b i l i z e d i ma g e . I t i s t h e d e v e l o p me n t t r e n d o f t h e i ma g e q u a l i t y a s s e s s me n t . T h e s t u d y p r o v i d e s a t h e o r e t i c a l b a s i s f o r f u r t h e r r e s e rc a h o f s t a b i l i z e d i ma g e q u a l i t y e v lu a a t i o n . Ke y wo r d s: e l e c t r o n i c i ma g e s t a b i l i z a t i o n ; s t a b i l i z i n g a l g o it r h m e v a l u a t i o n; i f d e l i t y; P S NR; h u ma n v i s u l a c h a r a c t e i r s t i c s
电子稳像算法和视觉跟踪算法研究
电子稳像算法和视觉跟踪算法研究电子稳像算法和视觉跟踪算法研究摘要:随着科技的飞速发展,电子稳像算法和视觉跟踪算法在图像处理领域的应用越来越广泛。
本文将详细介绍电子稳像算法和视觉跟踪算法的原理、方法以及在图像处理中的应用。
电子稳像算法主要通过图像处理技术实现消除图像模糊和抖动的效果,视觉跟踪算法则可以用于目标检测、追踪等方面。
本文将以此为主线,通过实验和案例研究,探讨电子稳像算法和视觉跟踪算法在实际应用中的优势和挑战。
一、引言电子稳像算法和视觉跟踪算法是近年来图像处理领域的热门研究方向。
随着数码相机、智能手机等设备的普及,用户对于摄影、拍照的要求也越来越高。
电子稳像算法可以有效减少因为手持拍摄导致的图像模糊和抖动问题,提升图像质量。
视觉跟踪算法则可以实现目标检测和追踪等功能,为安防监控、自动驾驶等领域提供了强大的技术支持。
本文将围绕电子稳像算法和视觉跟踪算法展开详细探讨。
二、电子稳像算法的原理与方法1. 图像稳定原理图像稳定是通过计算机算法对图像进行处理,使其消除由于手持拍摄导致的图像模糊和抖动。
图像稳定算法主要分为基于光学流的稳定算法和基于特征点的稳定算法。
基于光学流的算法通过计算图像中每个像素在连续帧之间的位移来实现图像的稳定,而基于特征点的算法则通过计算关键点的位置和方向变化来达到稳定的效果。
2. 常见的电子稳像算法(1)均值滤波算法:通过计算像素周围邻域像素的均值,进而更新当前像素的值,达到降噪和图像平滑的效果。
(2)运动补偿算法:通过分析连续帧之间物体的位移信息,计算出对应位移的运动矢量,从而实现图像的稳定。
三、视觉跟踪算法的原理与方法1. 目标检测与跟踪目标检测和跟踪是视觉跟踪算法的重要应用领域。
目标检测主要通过人工智能和机器学习算法实现,包括卷积神经网络(CNN)、支持向量机(SVM)等。
跟踪算法则基于目标的特征提取和特征匹配等技术,实现对于目标在连续帧之间的追踪。
2. 常见的视觉跟踪算法(1)基于颜色特征的视觉跟踪算法:通过提取目标的颜色特征,计算目标和背景之间的颜色差异,进而实现目标的跟踪。
基于特征跟踪的电子稳像技术研究的开题报告
基于特征跟踪的电子稳像技术研究的开题报告
一、选题背景
电子稳像技术是一种常见的图像处理技术,其优点在于能够有效减少图像抖动。
目前,电子稳像技术已经广泛应用于手机、相机等电子设备中,甚至在地震监测和航空监测中也得到了应用。
而在目前的电子稳像技术中,基于特征跟踪的电子稳像技术是相对先进的一种技术手段。
二、选题意义
基于特征跟踪的电子稳像技术利用图像中的特征进行跟踪,能够更加准确、可靠地实现图像稳定,相比传统的运动补偿方法,具有更高的精度和更好的效果。
在目前的电子设备市场中,消费者对于图像稳定的要求越来越高,因此对于基于特征跟踪的电子稳像技术的研究具有非常重要的现实意义。
三、研究内容和方法
本论文的研究内容主要是基于特征跟踪的电子稳像技术,主要研究内容包括特征提取、特征匹配、运动估计、运动补偿等。
具体的研究方法包括文献综述、实验设计等。
四、预期目标和研究意义
本论文的预期目标是通过对基于特征跟踪的电子稳像技术的研究,设计出一种更加准确、可靠的稳像系统,并对其进行实验验证。
实现该目标的意义在于提高电子设备图像稳定性,提高用户体验,促进电子设备行业的发展。
基于特征点匹配的电子稳像算法研究

基于特征点匹配的电子稳像算法研究电子稳像(Electronic Image Stabilization,EIS)是一种用于消除图像抖动的技术,在无法使用机械稳定器的情况下,通过软件算法提供图像稳定效果。
其中,基于特征点匹配的电子稳像算法是一种常见的方法,本文将对其进行研究。
首先,特征点是指在图像中具有独特性和可重复性的位置,例如角点、边缘等。
特征点匹配是将两幅图像中的特征点进行对应,从而确定两幅图像之间的空间变换关系。
基于特征点匹配的电子稳像算法主要分为以下几个步骤。
1. 特征点提取:首先对输入的图像进行特征点的提取,常见的方法有Harris角点检测、边缘检测等。
这些提取算法能够根据图像的局部纹理和结构提取出具有独特性质的特征点。
2.特征点描述:对提取到的特征点进行描述,常用的方法是使用局部特征描述符,例如SIFT、SURF等。
这些描述算法能够生成一个能够描述特征点局部结构的向量。
3.特征点匹配:将待稳像的图像与参考图像进行特征点匹配,常见的方法有KNN(K-近邻)和RANSAC(随机抽样一致性算法)。
KNN通过比较特征点间的距离,找到最相似的几个特征点,RANSAC则通过随机选择一组特征点进行模型拟合和误差评估,得到最优匹配。
4.运动估计:通过匹配到的特征点,计算出两幅图像之间的运动变换参数,例如平移、旋转、尺度变换等。
常用的方法有最小二乘法、迭代最近点算法等。
5.图像稳定:通过获取的运动变换参数,对输入的图像进行变换,从而实现图像稳定。
变换的方法有基于仿射变换、基于投影变换等。
通过逆变换的方式,可以将运动模糊消除,从而得到稳定的图像。
基于特征点匹配的电子稳像算法具有一定的优势。
首先,它不需要额外的硬件设备,只需要在图像处理阶段进行算法处理即可。
其次,特征点匹配能够提取出独特的特征点,保持良好的鲁棒性。
同时,特征点匹配也适用于多种类型的图像,如自然场景、工业图像等。
然而,这种算法也存在一些挑战。
电子稳像算法研究与实现

参 数 及 第k 帧 到 第 k 2 的 变 换 参 数 累 一1 - 帧 计求得 , 由此 类 推 , 最终 可 由相 邻 帧 运 动 参 数 累计 , 得 当前 帧 到 任 意 模 板 帧 的 变 换 求 参数 。 1. 2运动 平滑 在 处 理 包 含 摄 像 机 主 观 运 动 的 非 定 点 拍 摄 场 景 时 , 文 选 用 简 单 高 效 的 均 本 值 滤 波 去 除 高 频 抖 动 。 水 平 平 移 分 量 为 以 例 , 平 滑 长 度 为 n Dix 表 示 第 i 与 第 设 , () 帧 i 帧 间的 水 平 位 移 量 , 当 前 第 k 与第 一1 则 帧 k—n +1 问 的 水 平 位 移 累 计 量 D为 : 帧
一
原 始 第k 图像 中 的对 应 位 置X( , ) Jk, 帧 k r= ( r一1 Xr I 中某 点 xr ) × 。 的灰 度 值 即 为I( X ( r) 图 l k,) 如 所示 , 由于 ( ) ×X 所计 算值 J 一1 可 能 并 不是 整 数 值 , 像 素 点 位 置 信 息 由 而 两 个 整 数 值 描 述 。 时 需 要 选 择 插 值 方法 这 进 行插 值 , 合 考 虑 精 度 与实 时性 , 文 采 结 本 用 二 次线 性 插值 方 法 , 根据 ( Y ) x , 点的 四个
一
2 林 视 列 。 完 成 运 动 平 滑 后 , 以根 据 估 计 出的 [】孟 龙 , 行 刚 . 频 抖 动 补 偿 系 统 的 运 在 可 动滤 波 【 . J 清华 大学 学 报( 】 自然 科学 版 ) , 抖 动 运 动 参 数 , 视 频 中 的 每 一 帧 图 像进 对 2 0 4 ( )41 5 0 5, 5 1 : ~4 . 行校 正 变 换 , 得 初 步 稳 定 的 视频 序 列 。 获 3 o g LiZ o a u Z o u 实 验 平 台 选 用 均 值 平 滑 方 法 获 得 抖动 【】S n , h u Yu n h a, h u J n. Ro bus Vi e S abiia in Ba e o t d o t lz to s d n 运 动 参 数J。 视频 图像 序 列 中的 某一 帧I .设 k Moin V cos J o ra fS a g a t e tr[ . un l h n h i o JJ o 变 换 到模 板 帧r 坐标 系后 的 图像 为I , 的 x U ies yE gi dt n , 0 5 9 1: nv r t (n l h E i o ) 0 ,() i s i 2 为 当前 第k 中 的 点x 在 模板 帧r 标 系下 帧 坐 46~ 51. 对 应 的位 置 , 用抖 动运 动参 数 , 得 。 利 可 x =Jk, ) 补 偿后 图像 I 中某 点 在 ( r XX 则
基于 FPGA数字相位调制光外差激光稳频系统设计
基于 FPGA数字相位调制光外差激光稳频系统设计耿伟彪;胡姝玲;邵洪峰【摘要】In order to stabilize the output frequency of 1064nm single frequency fiber laser , the Pound-Drever-Hall ( PDH) locking technique was applied for laser frequency stabilization .The PDH optical heterodyne frequency stabilization system was established .The phase modulation optical heterodyne signal and the demodulation error signal were analyzed . Field-programmable gate array ( FPGA) based digital PDH demodulation and feedback control system was designed .A sine wave generator and the multiplication demodulation were implemented in FPGA .Then the error signals were obtained by digital/analog convector . Experimental results show that phase modulation optical heterodyne signal is demodulated successfully in FPGA , and the Allan variance of frequency drifts can reach 10 -11 , a high level of frequency stabilization .%为了实现中心波长为1064nm的单频光纤激光器的稳频,采用相位调制光外差( PDH)激光稳频技术,搭建稳频系统光路。
电子稳像理论及其应用研究

电子稳像理论及其应用研究电子稳像理论及其应用研究电子稳像是一种通过电子设备对图像进行实时调整,抑制摄影或摄像中由震动引起的图像模糊的技术。
随着科技的进步和电子器件的发展,电子稳像技术在摄影、摄像、无人机和医学等领域得到了广泛的应用和研究。
本文将对电子稳像的理论原理及其在不同领域的应用进行探讨。
一、电子稳像的理论原理电子稳像的理论基础是图像处理和图像信号处理。
其基本原理是通过对图像进行实时处理和调整,消除由于摄像设备在使用过程中发生的震动或晃动而引起的图像模糊。
具体而言,电子稳像技术通过设备内部的加速度传感器或陀螺仪来检测摄像机的震动状态,然后根据检测到的信息对图像进行实时调整。
电子稳像技术主要包括两个步骤:图像采集和图像处理。
在图像采集阶段,通过记录机身的震动状态,设备可以检测到摄像机的晃动、抖动或旋转。
在图像处理阶段,设备使用算法对图像进行调整,以抵消或减少震动效应,从而获得更清晰、更稳定的图像。
二、电子稳像的应用研究1. 摄影和摄像领域电子稳像技术在摄影和摄像领域中得到了广泛应用。
尤其是在低光条件下或需要长时间曝光的情况下,由于手持相机容易发生晃动,电子稳像技术可以有效减少图像模糊。
此外,电子稳像技术还可以在运动场景中实现流畅的画面效果,如拍摄体育比赛或快速运动的动物。
2. 无人机领域无人机在航拍、农业、安全监控等领域具有广泛的应用前景。
然而,由于无人机在飞行过程中受到气流和风力的影响,图像模糊问题成为限制无人机应用的重要因素。
通过将电子稳像技术应用于无人机,可以实时调整摄像设备,提供稳定、清晰的图像和视频。
3. 医学领域电子稳像技术在医学领域的应用主要体现在内窥镜和手术等方面。
通过将电子稳像技术应用于内窥镜,可以实现手术过程的实时监测和准确定位,为医生提供更清晰、稳定的视野。
此外,电子稳像技术还可以用于微创手术,帮助医生进行精细的操作。
4. 其他领域除了上述领域,电子稳像技术还有许多其他的应用。
FPGA图像采集论文

基于FPGA的图像采集系统设计前言随着科技社会的发展,图像采集系统在日常生活、工业生产、国家安全等众多领域得到广泛的应用,具有广阔的应用前景和研究价值。
采用FPGA进行设计的图像采集系统有良好的扩展性能和相对稳定的硬件结构。
主要工作如下: 1)分析图像采集和图像处理的原理和特点,设计硬件电路的原理图,完成系统PCB板图的设计。
2)针对FPGA进行内部功能模块的划分,使用Verilog HDL硬件描述语言进行设计。
3)利用SOPC Builder 完成NIOS处理器软核及其外设的创建和配置。
4)根据FPGA内部硬件电路的特点,选择适合FPGA的算法,并对算法进行优化。
5)在NIOS II IDE环境下用Verilog HDL语言编写图像传感器控制、图像采集、SRAM读写控制、图像显示等程序,实现完整的图像采集系统功能。
1课题分析1.1 选题背景(含国内外相关研究综述及评价)与意义EDA技术的发展和应用普及性越来越高,已经涉及到现代电子产品设计的各个系统、各个领域中。
之所以有这样的广泛应用,主要得益于可编程逻辑器件的长足发展和日益成熟,可编程逻辑器件(Programmable Logic Device, PLD)是一种半定制集成电路,在其内部集成了大量的门和触发器等基本逻辑单元电路,通过用户编程来改变PLD内部电路的逻辑关系或连线,从而得到所需要的电路设计功能。
这种新型逻辑器件,不仅速度快、集成度高,能够完成用户定义的逻辑功能,还可以加密和重新定义编程,其允许编程次数可以达到上万次。
可编程逻辑器件的出现,大大改变了传统数字系统设计方法,简化了硬件系统、降低成本、提高系统的可靠性、灵活性。
因此,自20世纪70年代问世以后,PLD受到广大工程师的青睐,被广泛应用于工业控制、通信设备、仪器仪表和医疗电子仪器等众多领域,为EDA技术开创了广阔的发展空间。
VGA作为一种标准的显示接口,在视频和计算机领域得到了广泛的应用。
摄像稳定平台研究的开题报告

摄像稳定平台研究的开题报告
标题:摄像稳定平台研究
摘要:
随着科技的进步,摄影设备已经发展成为了一个重要的文化娱乐工具。
然而,摄影作品的质量对于影像艺术的表现有着至关重要的影响。
其中,稳定性是保证影像画面质量的重要因素之一。
本文旨在研究一种新型的摄像稳定平台,以解决摄影过程中出现的颤抖问题,并提高摄影作品的质量和可靠性。
关键词:摄像稳定,影像质量,影像艺术
研究内容:
本研究计划设计和制造一种新型的摄像稳定平台,以解决摄影作品中出现的颤抖问题。
该平台将基于最先进的稳定化技术,采用传感器和计算机视觉技术来实现。
该平台将能够自动检测并调整摄像设备的位置和角度,从而保持画面稳定。
通过稳定化技术的应用,该平台将提高摄影作品的质量和可靠性,使用户能够获得更优质的影像作品。
研究方法:
本研究将采用实验室实践的方式,通过设计和制造一种新型的摄像稳定平台来研究。
在平台设计和制造过程中,将使用最先进的成像系统和计算机视觉技术,进行各种实验和测试。
在测试过程中,将使用不同的摄像设备和场景,以测试和确认平台的稳定性和实用性。
预期成果:
通过本研究,将获得一种新型的摄像稳定平台,能够大幅度提高摄影作品的质量和可靠性。
该平台将基于最先进的稳定技术,采用传感器和计算机视觉技术来实现。
通过实验室实践,将在不同的设备和场景中测试该平台的可用性和稳定性。
基于FPGA的舰载一维相控阵雷达电子稳定平台实现

基于FPGA的舰载一维相控阵雷达电子稳定平台实现
陈彦来;高星;刘文政
【期刊名称】《舰船电子对抗》
【年(卷),期】2018(041)003
【摘要】提出了一种基于现场可编程门阵列(FPGA)的舰载一维相控阵雷达电子稳定平台解算方案,主要包括电子稳定平台算法、电子稳定平台FPGA解算步骤、正
余弦计算、反正切计算、向量乘法、截断等处理方法.该实现方案可以同时进行多
个收发波束的电子稳定平台解算,以满足雷达多波束处理需求,并且具备解算速度快、解算精度高、使用资源少等特点,具有一定的工程应用价值.
【总页数】5页(P59-63)
【作者】陈彦来;高星;刘文政
【作者单位】中国船舶重工集团公司第七二三研究所,江苏扬州225101;中国船舶
重工集团公司第七二三研究所,江苏扬州225101;中国船舶重工集团公司第七二三
研究所,江苏扬州225101
【正文语种】中文
【中图分类】TN957.5
【相关文献】
1.舰载一维相扫雷达电子稳定设计与仿真分析 [J], 秦琨
2.舰载相控阵搜索雷达电子稳定平台的设计与实现 [J], 秦琨;张兢晶
3.舰载一维相扫雷达电子稳定设计与仿真分析 [J], 秦琨
4.舰载相控阵搜索雷达电子稳定平台的设计与实现 [J], 秦琨[1];张兢晶[1]
5.舰载一维相控阵雷达波束电子稳定研究 [J], 栾铸徵;陈舒敏;吴俭
因版权原因,仅展示原文概要,查看原文内容请购买。
基于FPGA的电子稳像系统的设计

基于FPGA的电子稳像系统的设计
电子摄像系统已广泛应用于军用及民用测绘系统中,但是效果受到其载体不同时刻姿态变化或震动的影响。
当工作环境比较恶劣,尤其是在航空或野外操作时,支撑摄像机平台的震动会引起图像画面的抖动,令观察者视觉疲劳,从面产生漏警和虚警。
所以在运行中,如何稳像成为十分重要的问题,特别是在长焦距、高分辨力的监视跟踪系统中更加突出。
具璞蒿、实性性强、体积小巧等特点,得到更广泛的应用。
稳像系统的反应速度是电子稳像要解决的关键技术之一。
传统的基于摄像机- 图像采集卡-计算机模式的稳像系统、图像检测和匹配算法全部由计算机以软件方式实现。
尽管当今计算机的性能很高,能够部分满足单传感器电子稳系统的实时处理要求,但在以下几个方面有着难以解决的问题:首先,其固有的串行工作方式使得单计算机难以适应其于多传感器视频处理系统的实时稳像,阻碍了在实际中的应用adw 欠,传统的图像采集卡中能将采集图像数据实时传输给计算机,而不能传输给标准接口的视频监视设备lk 之很多应用场合对听要求很高。
因此,研制专用的电子稳像平台,既能实时地高速获取视频数据,又能将数据实时地传后续的图像处理系统,既有实际意义又有工程价值。
1 系统涉及的关键技术
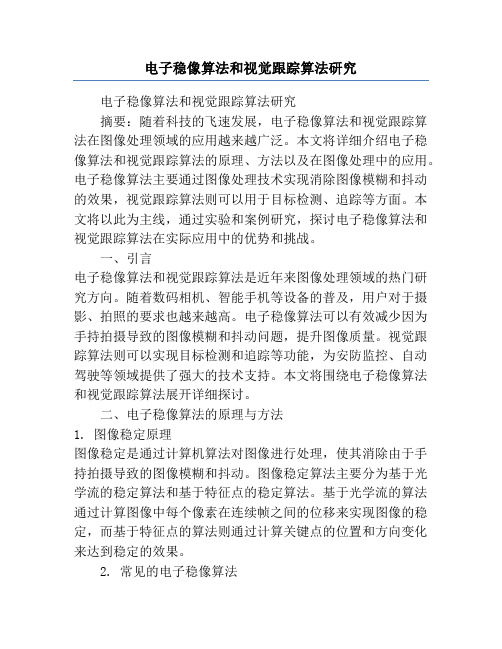
摄像头输入的PAL 制式电视信号首先通过视频处理接口完成对其解码、同步和数字化的工作,数字化后的图像信息进入到由FPGA 实现的帧存控制器中,完成数据的交换(数据的缓冲),同时完成系统要求的去隔行和放大的操作,最后处理好的数据通过VGA 控制器,完成时序变化,经视频、A 变为模拟信号送到VGA 监视器上实时显示。
1.1 视频处理接口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
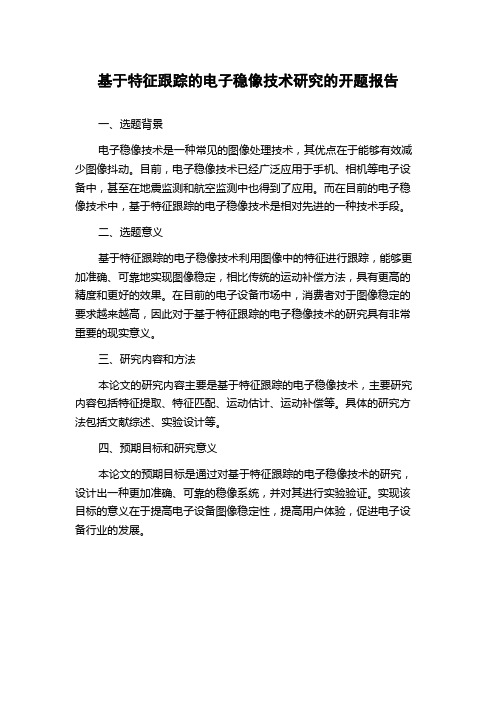
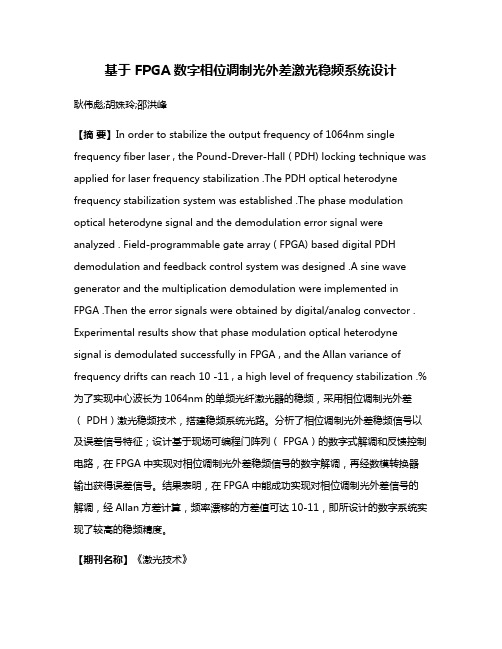
帧存控制器的设计对于实现两种不同视频系统之间的图像信号的存储、采集和显示显得非常重要。为了保证数据处理与采集的连续,设计中使用了两组帧存储器(FRAM1、FRAM2),由于数字化的图像每帧大小为640×480=307200(16bit)共300K×16bit的数据量,笔者使用每组512K×16bit的静态存储器,存储时间为12ns,可以保证快速地读出和写入图像数据。图3为帧存控制器的逻辑框图。>由于输入信号为隔行扫描的图像数据,显示输出需要逐行扫描数据,因此数据存入帧存储器时需要进行处理。设计中采用场合并行法,将两场的数据写入一个帧存中,构成一幅完整的逐行扫描图像,系统利用VREF信号对此进行控制,产生的帧切换控制信号控制数据在两个帧存中的切换。当VREF信号有效时,表明新的一场开始了,此时无效行计数器开始工作,控制不需要采集的图像行,计数到阈值后,有效行计数器开始工作,控制所要采集的图像行,并发出高位地十信号A[18..11];同样,当HREF有效后,无效像素计数器开始计数每行中的无效像素,然后有效像素计数器开始计数需要采集的行听有效像素;每次计满640个像素后,等待下一次有效行信号的到来,同时将有效行计数器加1。由于系统选用的帧存容量较大,因此利用ODD的反相信号作为帧存地址的A10,为每行图像提供了1024个存储空间(实际使用640个),可以简化数据写入与读出的控制电路。隔行的视频信号就会被逐行地存储到帧存体中。总线隔离与控制电路用来完成数据在帧存中的写入与读出的同步。由于采用SRAM作为帧存体,有效像素的写入与后续视频接口的读出不能在一个帧存体中同时进行,系统采用双帧存轮流操作的方法,系统采用双帧存轮流操作的方法:当数字化后的图像信息写入其中的一个帧存时,帧存控制器将另一个帧存中的像素顺序读出,送到显示设备,反之亦然。>1.4 视频图像的放大变换>应用栅格理论几何变换处理过程可以按下面方式进行描述:给定一个定义于点阵Λ1上已采样信号,需要产生一个定义于另一个点阵Λ2上的信号。如果,Λ1中的每一个点也在Λ2中,那么此问题是上转换(或内插)问题,可以先将那些在Λ2中而不在Λ1中的点添零(即零填充),然后用一个作用于Λ2上的内插滤波器估计这些点的值;若Λ1)Λ2,即为下转换(或抽取)问题,可以简单地从Λ1中取出那么也在Λ2中的点。然而,为避免下采样信号中出现混叠,需要对信号进行预滤波,以将其带宽限制到Λ2*的沃格纳晶体。上转换和下转换的过程示于图4(a)、(b)中。更一般的情况,如果Λ1和Λ2互相不包含,就需要找到另一个即包括Λ1又包括Λ2的点阵Λ3,可以先将Λ1上采样到Λ3,然后再下采样到Λ2。此过程示于图4(c)。图4(c)中Λ3中的中间滤波器完成两个 任务:首先,内插出Λ1中漏下的采样点;其次把Λ3中的信号频谱限制于Λ2*的沃格纳晶格。>由于系统中进行放大变换采用FPGA实现,因此本文讨论的重点在于如何简化实现并提高转换速度,上转换中的上采样过程为:>>(1)式中Ψs,1和Ψs,3分别为原理图像和上采样信号;U(.)为上采样运算;Λ2\Λ1表示在Λ2而不在Λ1内的点的集合。插值滤波器的定义如下:>>(2)式中,d(Λ)为栅格Λ的采样密度;v*表示栅格Λ的转逆栅格的Voronoi单元,即栅格Λ原点的单位元,它向所有栅格点平移将会无重叠地覆盖整个连续空间。最简单的插值滤波为线性插值,也可以采用二加权滤波的方法。图像的缩放还可以采用3次样条插值和小波分解的方法,虽然这些方法在理论上可以取得很好的图像缩放效果,但计算复杂,即使采用快速算法,也难以实现视频图像的实时显示。> 针对视频信号数据量大、数据流速度的特点,采用FPGA设计,可以完成帧存控制、视频信号的实时放大与叠加功能。基于运算速度与算法实现的难易程度分析,对视频信号的放大采用了简单的线性插值的办法,原理如图5所示。视频信号是以场或帧进行存储的,由于数据写入时存储地址与图像显示的空间位置有确定的对应关系,因此系统需要的放大处理就变为对帧存储体的地址线的控制问题。>对于本系统具体的4倍放大要求,将行同步信号先进行二倍行使能运算,并利用场同步信号对该寄存器进行复位,将生成后的二分频行同步信号控制行地址发生器,也就是产生帧存储器所需的高位地址;类似地利用像素时钟、行同步信号和场同步信号就可以得到所需的低位地址。由于在帧存控制器向帧存储器写入数据时采用了一行点1024个位置的办法,所以在低位地址后连接了一个比较器,当产生的低位地址小于640时,帧存储器的读信号有效,否则无效,以保证不会混叠入无效的数据。>1.5 VGA接口控制器>标准的VGA(640×480,60Hz)接口需要提供以下几组信号:3个RGB模拟信号、行同步信号HS和场同步信号VS。它的信号时序如图6所示。
1 系统涉及的关键技术>摄像头输入的PAL制式电视信号首先通过视频处理接口完成对其解码、同步和数字化的工作,数字化后的图像信息进入到由FPGA实现的帧存控制器中,完成数据的交换(数据的缓冲),同时完成系统要求的去隔行和放大的操作,最后处理好的数据通过VGA控制器,完成时序变化,经视频、A变为模拟信号送到VGA监视器上实时显示。
为了改进性能,可以使用一种对称的滤波器,例如,对前一场和后一场中的对应行去平均以获得当前场中丢失的行,即D=(K+R)/2。这种方法称为场平均。然而这种办法内插任何一场需要涉及三个场,需要两帧存储器。与场合并的方法相比,在存储器容量和延时上有不可忽视的增加。为了在时间和空间人为失真方面达到折衷,较好的方法是既用垂直内插也用时间内插。例如,通过对同一场中上一个和下一个像素以及前一场和后一场取平均进行内插的办法得到一个丢失的像素。综上所述,当成像的景物在相邻两场之间静止时,在奇数场中丢失的偶行数应该与前一个和后一个偶场中对应的偶数行完全一样。因此时间内插将产生精确的估计。另一方面,当景物中存在运动时,相邻场中对应行可能不在同一个物体位置上,时间内插将产生不可接受的人为失真。而同时使用空间和时间平均的方法将产生不太严重的人为失真,但在存储器容量和反应时间方面作出牺牲。>通过上述方案的对比及系统的具体要求,设计中采用了场合并的办法,具体实现由帧存控制器完成。>1.3 帧存控制器>帧存储器是图像处理器与显示设备之间的通道,所有要显示的图形数据先存放到帧存储器中,然后再送到显示设备进行显示,因此帧存储器的设计是图形显示系统设计的一个关键。传统上,可以实现帧存储器的存储器件有多种,如DRAM、SDRAM及SRAM等。DRAM、SDRAM属于动态存储器,容量大、价格全家但速度较慢,且在使用中需要定时刷新。对于基于FPGA的视频处理器,需要设计专用的刷新电路,增加了系统设计的复杂程度。SRAM速度高、接口简单、容量较小。随着集成电路技术的不断发展,容量不断增大,价格也不断下降。在需要高速实时显示的视频处理系统中的使用越来越普遍。
图1
稳像系统的反应速度是电子稳像要解决的关键技术之一。传统的基于“摄像机-图像采集卡-计算机”模式的稳像系统、图像检测和匹配算法全部由计算机以软件方式实现。尽管当今计算机的性能很高,能够部分满足单传感器电子稳系统的实时处理要求,但在以下几个方面有着难以解决的问题:首先,其固有的串行工作方式使得单计算机难以适应其于多传感器视频处理系统的实时稳像,阻碍了在实际中的应用adw欠,传统的图像采集卡中能将采集图像数据实时传输给计算机,而不能传输给标准接口的视频监视设备lk之很多应用场合对听要求很高。因此,研制专用的电子稳像平台,既能实时地高速获取视频数据,又能将数据实时地传后续的图像处理系统,既有实际意义又有工程价值。
图4
1.2 去隔行支持>PAL制电视信号采用隔行扫描机制,采用人眼的视觉暂留来实现两场1/50s扫描312.5行的图像构成625行(一帧)图像。而标准的VGA显示模式采用逐行扫描方式,在一个扫描周期内实现对图像的完全扫描。因此需要对视频信号进行去隔行处理。视频信号在经过缓冲后,按照取样时钟把经过模数转换的数字信号送入存储器缓存,通过数据内插的方法进行数据扩展,即相邻行之间按照一定的算法进行加权,从而得到内插行的数据,再以适当的速度读取处理后的数据,即可实现倍行频/倍场频的扫描。倍行频扫描可以消除行间的闪烁现象,倍场频扫描虽然行扫描频率不变,但是场频加倍,即能消除行间闪烁现象,还可以消除场间的大面积闪烁。去隔行问题的实质就是在每一场中填补被跳过的那些行,其过程如图2所示。>实际上为实现去隔行已经提出了很多简单的滤波器。一种选择是用同一场中的垂直内插值,这是个一维二倍上转换的问题。理想的垂直滤波器是一个半带低通滤波器。然而,这个滤波器要求无限长度冲击响应是不可实现的。实际应用中使用的是短得多的滤波器。最简单的是行平均,它用丢失行的上一行和下一行的平均来估计该丢失行。在图2中,对于第t场,D=(C+E)/2。由于没有使用时域滤波,所以它沿时间频率轴具有全通特性。为了改进性能,另一种选择是使用更长的垂直内插滤波器,其频率响应更接近理想的半带低通滤波器。对于第t场的行,满意的内插方法是D=(A+7C+7E+G)/16。以上两种方法都是只用了垂直内插。一种替代方法是使用时间内插。值得注意的是,对于一场中每个丢失行,在同一帧的另一场中有一个对应行。一个简单的时间内插方案是复制此对应行,即D=K,J=C。这种方法称为场合并。因为每一个去隔行帧都由合并两场获得,但是这两场的时间内插是相反的(对于某些特殊图案可能会产生视觉人为失真)。由于只在时间方向上进行了滤波,因此在垂直方向上是全通的。
图3
1.1 视频处理接口>由于在进行视频处理时,多为从摄像头输入模拟信号,如NTSC或PAL制式电视信号,除图像信号外,还包括行同步信号、行消隐信号、场同步信号、场消隐信号以及槽脉冲信号等。因而对视频信号进行A/D转换的电路也非常复杂。Philips公司将这些转换电路集成到了一块芯片中,从而生产出功能强大的视频输入处理芯片SAA7111,为视频信号的数字化应用提供了极大的方便。>系统设计采用SAA7111对复合信号进行采样、同步产生、亮色分离并输出标准的数字化信号。SAA7111输出的数字化图像信息符合CCIR.601建议,PAL制式的模拟信号数字化后的图像分辨率为720×572,像素时钟13.5MHz。在本稳像系统中要求图像输出符合VGA(640×480,60Hz)标准,因此在采集数据时要对数据进行选择,避开行、场消隐信号和部分有效像素信息,在较大的图像中截取所需要的大小。SAA7111向帧存控制电路输出像素时钟(LCC2)、水平参数(HREF)、垂直参考(VREF)、奇偶场标志信号(ODD)和16位像素信息(RGB565).其中LCC2用来同步整个采集系统;HREF高电平有效,对应一行720个有效像素;VREF高电平有效,对应一场信号中的286个有效行;ODD=1时,标志当前场为奇数场;ODD=0时,标志当前场为偶数场。采用16位RGB表示每个像素的彩色信息。图1(a)为数字化图像中的一行像素的时序图。其中两个HREF分别表示有效行的起始与结束位置,实际为一个信号;可以清楚地看到一行中有效的720个像素与像素时钟LLC2的对应关系,在采集时通过帧存器控制电路选择其中部的640个像素进行采集。图1(b)为一帧数字图像的输出时序图。可以看到在第624~22行时,VREF处于无效状态,因此在后续的采集中,这部分的信息不予处理并通过ODD的电平区分奇偶场数据。