基于PLC的大功率短波转动天线远程控制系统的设计与实现
《基于Web的智能短波发射机监控软件的设计与实现》范文

《基于Web的智能短波发射机监控软件的设计与实现》篇一一、引言随着信息技术和互联网技术的快速发展,智能监控系统在工业领域的应用越来越广泛。
在短波通信领域,基于Web的智能短波发射机监控软件因其方便的数据采集、远程控制和实时监测等特性,越来越受到行业的重视。
本文旨在介绍一款基于Web的智能短波发射机监控软件的设计与实现过程,并详细探讨其设计原理和实现方法。
二、项目背景及意义在传统的短波通信领域,由于地理位置和人力成本的限制,往往无法对短波发射机进行实时、高效的监控。
而基于Web的智能短波发射机监控软件通过将先进的网络技术、数据处理技术和自动控制技术应用于短波发射机的监控,不仅实现了对设备的实时监测和远程控制,还大大提高了工作效率和设备运行的稳定性。
因此,该软件的设计与实现具有重要的现实意义和应用价值。
三、系统设计1. 系统架构设计本系统采用B/S架构,即浏览器/服务器架构。
用户通过浏览器访问服务器,服务器端负责数据处理和业务逻辑处理,前端通过Web页面展示相关信息。
这种架构方式可以实现对设备的远程监控和管理,同时也方便了系统的维护和升级。
2. 硬件设计硬件部分主要包括短波发射机、传感器、数据采集器等。
传感器负责实时采集短波发射机的各项数据,如电流、电压、功率等;数据采集器负责将传感器采集的数据进行初步处理和存储;短波发射机则负责完成短波通信任务。
3. 软件设计软件部分主要包括数据采集模块、数据处理模块、用户界面模块等。
数据采集模块负责从硬件设备中获取数据;数据处理模块负责对采集的数据进行处理和分析;用户界面模块则负责将处理后的数据显示给用户,并实现用户的交互操作。
四、系统实现1. 数据采集数据采集是本系统的关键环节之一。
通过传感器和数据采集器,系统可以实时获取短波发射机的各项数据,如电流、电压、功率等。
同时,系统还可以通过其他方式获取设备的工作状态和故障信息等。
2. 数据分析与处理数据分析与处理是本系统的核心部分。
短波广播发射机的远程控制与管理平台设计

短波广播发射机的远程控制与管理平台设计随着科技的不断发展,短波广播作为一种传统而重要的广播手段,仍然在全球范围内被广泛应用。
然而,传统的短波广播发射机的操作与管理方式存在着一定的局限性和不便之处。
为了提升短波广播系统的效率和便捷性,设计开发一个远程控制与管理平台成为了当务之急。
一、需求分析1. 远程控制功能:远程控制是该平台的核心功能之一。
用户通过平台可以对短波广播发射机进行启动、停止、调整工作频率、调整功率等操作。
2. 状态监测功能:平台应具备对短波广播发射机的状态进行实时监测和反馈的能力,包括工作状态、电压、电流等参数的监测。
3. 报警与故障排查功能:平台应能实时监测短波广播发射机的异常状态,并及时发送报警信息给操作人员,以便进行故障排查。
4. 数据存储与分析功能:平台需要提供数据存储功能,包括对广播发射机工作数据的存储和提取功能,便于后续数据分析。
5. 用户权限管理功能:平台应支持不同用户的权限管理,确保只有授权人员才能进行操作,保障系统的安全性与稳定性。
二、系统设计1. 远程控制与通信模块:通过互联网实现对短波广播发射机的远程控制,采用TCP/IP协议进行数据传输。
使用安全加密技术保证数据的安全性。
2. 状态监测模块:通过传感器实时监测发射机的工作状态、电压、电流等参数,并将数据传输到管理平台进行实时展示与存储。
3. 报警与故障排查模块:通过设置预警阈值,当发射机状态异常时,及时向管理员发送报警信息,并记录异常状态以供后续故障排查参考。
4. 数据存储与分析模块:平台应设计数据库,存储每台短波发射机的工作数据。
可以通过数据分析软件对数据进行统计和分析,为优化发射机性能提供参考依据。
5. 用户权限管理模块:平台根据用户权限设置,包括管理员、操作员等权限,对用户进行登陆认证,并限制不同用户的操作权限,确保系统的安全性与稳定性。
三、系统实现1. 远程控制与通信模块:需开发对应的客户端软件,用户通过客户端软件可以对短波广播发射机进行控制和设置。
《2024年基于Web的智能短波发射机监控软件的设计与实现》范文

《基于Web的智能短波发射机监控软件的设计与实现》篇一一、引言随着信息化技术的不断发展,传统的短波发射机监控方式已经无法满足现代通信系统的需求。
因此,基于Web的智能短波发射机监控软件应运而生。
该软件能够实现对短波发射机的远程监控、实时数据采集、故障诊断等功能,有效提高了通信系统的可靠性和稳定性。
本文将介绍基于Web的智能短波发射机监控软件的设计与实现过程。
二、需求分析在需求分析阶段,我们需要明确软件的主要功能、性能指标以及用户需求。
首先,软件需要实现对短波发射机的实时监控,包括功率、频率、温度等参数的采集与显示。
其次,软件需要具备故障诊断功能,能够在发现异常情况时及时报警并给出故障原因。
此外,为了方便用户远程操作和管理,软件应具备基于Web 的界面,支持多用户同时访问。
最后,考虑到系统的安全性和稳定性,我们需要对软件进行严格的测试和优化。
三、系统设计系统设计阶段主要包括数据库设计、界面设计、算法设计等。
1. 数据库设计:为了存储短波发射机的实时数据和历史数据,我们需要设计一个关系型数据库。
数据库应包含发射机参数表、故障记录表、用户信息表等。
同时,为了确保数据的实时性和准确性,我们需要采用合适的数据同步和备份策略。
2. 界面设计:界面是用户与软件交互的桥梁,因此界面设计应注重用户体验。
我们可以采用Web技术实现B/S架构的界面,支持多种浏览器访问。
界面应包含实时数据展示、历史数据查询、故障诊断等功能模块。
3. 算法设计:算法是实现软件功能的核心。
针对短波发射机的监控和故障诊断,我们需要设计合适的算法。
例如,可以采用基于机器学习的异常检测算法实现故障诊断功能。
此外,为了确保系统的实时性,我们需要对算法进行优化和调试。
四、系统实现系统实现阶段主要包括编程、调试、测试等。
1. 编程:根据系统设计,我们使用合适的编程语言和开发工具进行编程。
在编程过程中,我们需要注重代码的可读性、可维护性和可扩展性。
2. 调试:在编程完成后,我们需要对软件进行调试。
大功率短波发射机数字调制控制器的设计
统可以有效 地改善发射机系统 的非线性 失真 , 并且优于模拟系统。 但是这套算法
上式中: () ×n为输入语音信号, () yn为
q. 1 阶梯放大器打开一个功率 [= 时, ] 不打开也不关闭。 “ 阶梯修正技术” “ P M调制 在 A— D 据功率模块阵列反馈的各个模块的工作信 息进行修正处理。 实际上 “ 数字积分器” 是 阶梯放大器在芯片内部的镜像, 因此这种
支持本地的手动操作和远程通信接 的高阻态, 自生同调信号会产生一定的相 高阶梯放大器带内的信噪比, 从而达到短 接口, 波广播的电声指标要求。 下面重点对数字 口操作。
调制控制器系统进行分析。 理都在这块电路板上进
() 3 综合算法板 : 主要和关键 的处 号中也会产生带有一定相移的谐波失真。
不 ̄6 i 为发射机高末级功放电子管提 入接口, l bt J , 兼容模拟和数字音频信号, 并统 上来看, 可以分为三段:
一
转换成串行P M C 码送给综合算法板。
( )0 z 0 H 15 H 一 0 z 2
() 2 调制接口 为调制器提供操作 板:
在这一频段上, 帘栅阻流圈不是理想 移, 在这一信号的作用下, 发射机输出信
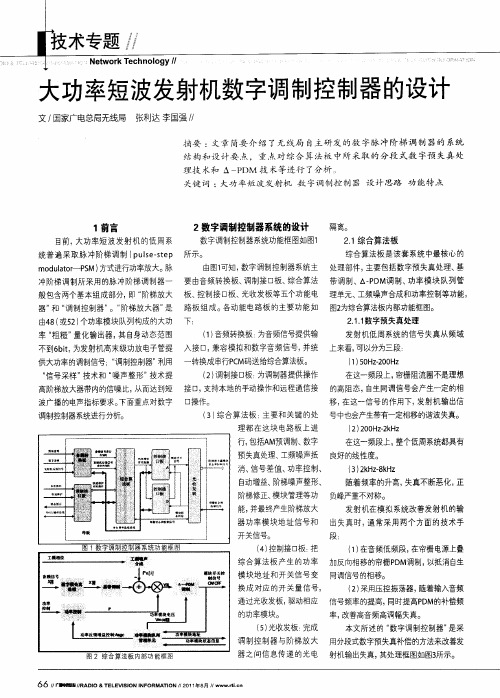
由图1 可知, 数字调制控制器系统主 处理部件, 主要包括数字预失真处理、 基
b 调制接口 综合算法 带调制、 一D 调制、 板、 △P M 功率模块队列管 冲阶梯调制所采用的脉冲阶梯调制器一 要E音频转换板、
控制接口板、 光收发板等五个功能电 理单元、 工频噪声合成和功率控制等功能 般包含两个基本组成部分, “ 即 阶梯放大 板、 为综合算法板内部功能框图。 器” “ 和 调制控制器” 阶梯放大器” 。“ 是 路板组成。各动能电路板的主要功能如 图2
基于现场总线技术的大功率天线转台伺服控制系统设计

f i e l d b u s t e c h n o l o g y
TAO Ch u n — r o n g,GUO Yo n g - z hi
( N o .7 2 4 R e s e a r c h I n s t i t u t e o f C S I C, N a n j i n g 2 1 1 1 5 3 )
0 引 言
近年来 , 随着 现场 总线技 术 的发展 , 伺服 控制 系统
逐 渐 由原来 简单 的模 拟量 、 开关量控制 , 渐 渐 向数 字
服控制单 元 与 电机驱 动单元 集成 为一 个机 柜 的设计 方
式 采 用该设 计方 式 可 以使 伺 服控制 系统 的设 备量 较
小, 结构 形 式 较 为 紧凑 。但 是 , 对 于 电 机 驱 动 单 元 来 说, 特别 是 大功率 的 交 流伺 服 电机 驱 动单 元 属 于 强 电 磁 干扰 源 , 其工作 原 理造 成 了其 在 工作 时会 对 电 网及 地线产 生一 定 的电磁 干扰 。如果 电机 驱 动单元 与伺 服 控制单 元处 于一 个 机柜 内 , 一 旦 在 电磁 干扰 方 面 设 计
控 制 系统 的几 个优 点 。
关键 词 :现 场总线 ; 伺服 系统 ; 电磁 兼容 中 图分类 号 : T N 9 5 7 . 8 1 文献标 志码 : A 文章 编号 : 1 0 0 9 - 0 4 0 1 ( 2 0 1 4 ) 0 4— 0 0 6 3— 0 3
De s i g n o f a h i g h — p o we r s e r v o c o n t r o l s y s t e m b a s e d o n
s o me a d v a n t a g e s o f t h e s e r v o s y s t e m b a s e d o n t h e ie f l d b us t e c h n o l o y g re a s u mma iz r e d. Ke ywo r ds:f ie l d b u s;s e r v o s y s t e m ;e l e c t r o ma g n e t i c c o mp a t i bi l i t y
基于PLC的自动化生产线控制系统设计与实现
基于PLC的自动化生产线控制系统设计与实现随着技术的不断进步和工业化的发展,自动化生产线在现代工业中扮演着越来越重要的角色。
自动化生产线的设计与实现中,PLC(可编程控制器)技术被广泛应用,其稳定性和可靠性使之成为自动控制的首选。
本文将探讨基于PLC的自动化生产线控制系统的设计与实现。
1. 控制系统框架设计在基于PLC的自动化生产线控制系统中,一个常见的框架设计包括输入模块、输出模块、PLC控制器、执行器和人机界面。
其中,输入模块通过各类传感器将传感信号转换为电信号输入给PLC;输出模块通过电信号将PLC的控制信号转换为动作信号输出给执行器;PLC控制器是系统的核心,负责处理输入信号,根据程序逻辑进行计算控制,并通过输出模块输出相应的动作信号给执行器;执行器负责根据PLC的控制信号进行相应的机构运动;人机界面则通过触摸屏或者其他交互方式与控制系统进行人机对话和监控。
2. PLC程序设计PLC程序的设计是控制系统设计中的关键一环。
根据自动化生产线的需求和具体控制逻辑,编写PLC程序可以实现自动化的逻辑控制。
通常,在PLC程序设计中,可以使用Ladder图、功能块图或者指令表等方式进行梯形逻辑的表示和运算。
根据具体控制要求,逻辑图中可以包含计数器、定时器、比较器等功能模块,实现对传感信号的监测、计数和定时控制等功能。
3. 实时监测与报警处理在自动化生产线控制系统中,实时监测和报警处理是非常重要的环节。
通过PLC与各类传感器的连接,可以实时监测生产线中的各项参数和状态。
一旦出现异常情况,PLC可以及时发出报警信号,并通过人机界面向操作员提示异常信息。
同时,PLC还可以与其他设备进行联动控制,实现故障自动排除或者设备自动停机等功能,保证生产线的安全和稳定运行。
4. 网络通信与数据分析随着信息化的发展,自动化生产线控制系统的网络通信与数据分析功能也变得越来越重要。
通过将PLC与上位机或者云平台进行网络连接,可以实现远程监控和管理。
短波广播发射机的远程控制与监测系统研究
短波广播发射机的远程控制与监测系统研究概述近年来,随着技术的不断发展,短波广播系统的远程控制与监测需求逐渐增加。
为了满足这一需求,研究人员开始对短波广播发射机的远程控制与监测系统进行深入研究。
本文将从系统整体架构、远程控制功能、监测功能等方面介绍短波广播发射机的远程控制与监测系统的研究现状及发展趋势。
一、系统整体架构短波广播发射机的远程控制与监测系统一般由主控端与被控端两部分组成。
主控端通常由一台或多台计算机组成,运行着远程控制与监测软件,并通过网络连接被控端的短波广播发射机。
被控端则是指实际的短波广播发射机设备,通过各种通信方式与主控端进行连接。
目前,主控端常用的网络连接方式为以太网。
主控端与被控端之间的通信主要通过TCP/IP协议完成,这种通信方式稳定可靠且效率较高。
另外,一些研究也尝试了无线通信方式,如基于无线网络的控制与监测系统。
无线通信方式可以提高系统的灵活性,但也存在信号干扰等问题需要解决。
二、远程控制功能远程控制功能是短波广播发射机远程控制与监测系统的核心功能之一。
通过该功能,运维人员可以在远程地点对短波广播发射机进行操作和设置,无需亲临现场。
典型的远程控制功能包括频率切换、功率控制、设备启停等。
频率切换功能是短波广播系统中常用的功能之一。
通过该功能,运维人员可以远程切换短波广播发射机的工作频率,以适应不同的广播需求。
功率控制功能则可以远程调节短波广播发射机的输出功率,以达到所需的覆盖范围。
设备启停功能则可以实现短波广播发射机的自动开关机,以提高系统的运行效率。
三、监测功能监测功能是对短波广播发射机远程控制与监测系统的另一个重要要求。
通过监测功能,运维人员可以在远程地点实时获取短波广播发射机的工作状态、参数和性能指标,以便进行实时的故障分析和性能优化。
典型的监测功能包括:工作状态监测、参数监测和性能指标监测。
工作状态监测主要是监测短波广播发射机的开/关机状态、设备连接状态等。
参数监测则主要是监测短波广播发射机的频率、功率、工作温度等各项参数。
测控技术与仪器专业毕业论文--基于PLC的远程温度控制系统的设计与调试
基于PLC的远程温度控制系统的设计与调试摘要在许多现代工业生产中,温度控制都是要解决的问题之一,对于很多危险或者无需人力控制的领域,我们可以用远程控制,在办公室里就可以对现场进行监控,即方便又安全。
随着电子技术的发展, 可编程序控制器(PLC)已经由原来简单的逻辑量控制, 逐步具有了计算机控制系统的功能。
本文提出了采用组态软件和可编程控制器组成一个比较简单、通用的远程温度控制系统。
可编程控制器的一个优势就是可以很方便的改写其中的程序以满足不同的工艺,尤其在工艺改进时优势更加明显。
组态软件则可以提供一个符号现场的直观人机友好界面。
文章着重介绍了组态软件和可编程控制器在温度控制设计中应用,描述了使用可编程控制和计算机一起组成控制功能完善的控制系统的一般设计方法和过程。
关键词:远程控制;温度控制;组态软件;编程控制器.The Design and Development of a PLC-based Remote TemperatureController SystemAbstractIn many modern manufacturing productions, temperature control is one of the most problems to be solved. In many dangerous or no human required control areas, we can use remote control in the office, which will be able to monitor the scene, which is convenient and safe. With the development of electronic technology, programmable logic controller (PLC) has developed from simple logic of control, and gradually with a computer control system.This paper presents configuration software and programmable logic controllers to form a relatively simple, universal remote temperature control system. The PLC takes an advantage that can be easily adapted from one of the procedures to meet the different technology, particularly in the process improvement. Configuration software can provide a symbolic scene of the friendly and intuitive man-machine interfaces. The article focused on the configuration software and programmable controllers in the design of temperature control, describes the use of programmable control and computer components to improve the control of the general control system design methods and processes.Keywords: remote control; temperature control; configuration software; programmable logic controller (PLC).目次基于PLC的远程温度控制系统的设计与调试 (I)目次 (III)1 绪论 (1)1.1 问题的提出 (1)1.2国内外研究状况 (1)1.3研究方法 (3)1.4研究意义 (4)2 PLC控制系统的硬件组成 (5)2.1欧姆龙CPM2AH功能简介 (5)2.1.1性能和功能 (5)2.1.2基本系统配置 (10)2.1.3结构与操作 (12)2.2 MAD01模拟量I/O单元 (18)2.2.1使用模拟量I/O单元 (18)2.3 串口通信 (19)3组态王软件简介 (22)3.1组态王程序组成员 (22)3.2制作一个工程的一般过程 (23)4系统的设计与调试 (26)4.1设计思路 (26)4.2下位机的设计与调试 (26)4.2.1 PLC的程序设计 (26)4.2.2问题及解决方法 (28)4.3上位机的设计与调试 (29)4.3.1 组态王工程的建立和调试 (29)4.3.2 问题及解决方法 (31)4.4上位机与下位机的通信连接 (31)4.4.1 通信的实现 (31)4.4.2 问题及解决方法 (32)5 结论 (33)参考文献 (34)致谢 (35)1 绪论1.1 问题的提出许多领域都需要对温度的监控,如工厂的生产设备、化工领域、航空航天、农作物的种植和储存、实验室等等。
基于PLC的工业控制系统的设计与实现

基于PLC的工业控制系统的设计与实现一、本文概述在当前工业化生产日益智能化、自动化的背景下,设计与实现一套基于可编程逻辑控制器(PLC)的工业控制系统具有重要的实践意义和理论价值。
本文旨在全面探讨基于PLC的工业控制系统的设计原理、关键技术及其实际应用过程。
研究工作首先从梳理PLC的基本原理和功能特性入手,深入剖析其在控制领域中的核心地位,以及如何适应不同工业环境下的复杂控制需求。
本文系统地阐述了工业控制系统的设计思路,涵盖了系统架构设计、硬件选型配置、软件编程策略以及网络通信技术等方面。
在设计阶段,我们将详细介绍如何结合生产工艺流程,利用PLC的模块化和灵活性优势构建可靠且高效的控制方案。
在实现环节,将进一步探讨如何通过梯形图、结构文本等编程语言实现控制逻辑,并采用先进的故障诊断与安全防护措施确保系统的稳定运行。
全文将以具体的实际案例为依托,展示基于PLC的工业控制系统从设计规划到实施调试的全过程,旨在为相关领域的工程技术人员提供一套完整的、具有指导意义的设计方法和实践经验。
同时,通过对现有技术的总结和展望,本文还将对PLC在工业0及智能制造背景下的发展趋势和挑战进行探讨,以期推动我国工业自动化水平的不断提二、技术概述在进入基于PLC的工业控制系统的设计与实现之前,首先需要了解一些关键技术。
PLC,即可编程逻辑控制器,是一种广泛应用于工业控制系统中的数字化运算控制器。
它采用一类可编程的存储器,用于存储指令,执行逻辑运算,顺序控制,定时、计数和算术操作等面向用户的指令。
本节将重点概述PLC技术、工业控制系统设计的基本原则以及实现这些系统时常用的技术。
可靠性高:PLC采用了一系列的硬件和软件抗干扰措施,能在恶劣环境下稳定运行。
灵活性强:通过改变编程,PLC能适应不同的控制要求,具有良好的灵活性和扩展性。
需求导向:系统设计应以实际工业需求为出发点,确保系统功能满足生产需求。
经济高效:在满足功能需求的前提下,尽可能降低成本,提高系统效率。
短波天线交换控制系统运行图在PLC中的实现——基于ControlLogix5000处理器
C n o  ̄ i 系统的具有软件可恢复的电子保险丝 、电子 K Y和各种 otl g rl x E 条运行图的具体 睛况, 如上面的 Y n i T l , 到 Y n i T 1 , l u Xr u [ 0 I 0 1 u X n u [ 1 的 g g 0 5 强大的故障诊断能力, 点级的出错报告, 全部模块的带电插拔等。C n o 解释。上位机根据运行图, otl r— 把数据写到 P C中 L 相应的数组中, P C 以便 L 读取 L g 实现了完全符号化的编程, oi x 用户不需要记忆任何 P C地址 , L 其数据结 应用 。 构也是可以用户可定义, 支持梯形图 、 顺序功能流程图、 功能块 、 结构文本等 3 P C时 间的读取 与校 准 . L 2 多种编程语言, 全部编程语言和数据结构均符合 IC 1 E 1 3 标准, 1 极大地方便 运行图控制要求 P C的时间要准确, L 本文中 P C的时间是上位机通过 L 了用 户编 成和维 护 。 GS P 时钟信号, 把数据写到 Stie 敞 组中进行 自 e mf T 7 动校准, 或者通过手动输 2 硬 件结构 功能 入时间进行校准, 以确保 P C时间的准确。P C时时读取时间, L L 存储到 My — 21 天线交 换系 统的组 成 Tme ] 中, Y n ig u [ ,6 i [ ̄ 7 与 u XrT *1 1渤组 中存储的运行图进行 比较, 6 进行运
( 7 6 L 1控 制 器 , 于 Eh re 15 一 6 ) 基 tent网络 与人 机 操 作 系统 进 行 通讯 , 过 梯 形 图 程 序设 计 , 现 天 线 交 换控 制 系统 运行 图 的控 制 。使 得 天 线交 换 控 制 通 实 系统 在 上 位机 和 网络 出现 故 障 时 , 能 在 P C的 控 制 下 继 续 运行 图操 作 , 影 响 正 常播 出 。 也 L 不 关键 词 : ot loi; 行 图 ; 形 图 ; 线 交 换控 制 系统 C nr L g 运 o x 梯 天
短波电台的自动化控制和远程监控技术

短波电台的自动化控制和远程监控技术随着科技的进步和信息技术的快速发展,短波广播电台在传输音频和数据方面起到了重要的作用。
为了更高效地运行这些设备,提高工作效率并确保广播的稳定性,短波电台的自动化控制和远程监控技术逐渐发展起来。
本文将探讨短波电台自动化控制和远程监控技术的应用、优势以及未来的发展趋势。
首先,短波电台的自动化控制技术是指利用计算机程序和先进的控制系统,以实现对设备的远程操作和管理。
自动化控制技术能够有效地减少人工操作,提高工作效率。
通过设置预定的时间表,自动化控制系统可以实现短波电台的开关机、信号调整、频率切换等操作,从而减少人为错误和节省人力资源。
另外,自动化控制技术还可以通过高级算法和智能化系统实现音频质量的自动检测和调整,以保证广播节目的音质。
其次,短波电台的远程监控技术是指通过远程控制中心对电台设备的状态进行实时监测和控制。
远程监控技术通过传感器、网络连接和数据传输技术,将设备的运行情况实时传输到远程控制中心,从而实现对电台设备的远程管理和控制。
远程监控技术可以及时发现设备运行异常和故障,并及时采取措施进行处理,避免因设备问题造成的广播中断和损失。
此外,远程监控技术还可以实现电台频率、功率和覆盖范围的实时监测和调整,以提升广播效果。
短波电台的自动化控制和远程监控技术具有许多优势。
首先,自动化控制技术减少人工操作,提高了工作效率,减少了人为错误的发生。
其次,自动化控制技术可以在设定的时间内进行操作,实现24小时无人值守,从而降低了运维成本。
再者,远程监控技术使得电台设备的状态实时可见,故障可以迅速被发现和解决,减少了维修时间和维修成本。
此外,远程监控技术还使得电台设备的维护更加便捷,可以通过远程控制中心进行远程固件升级和设置调整。
未来,短波电台的自动化控制和远程监控技术有着更广阔的发展前景。
随着物联网技术的兴起,电台设备可以实现更多的自动化控制和远程监控功能。
例如,可以通过物联网技术将电台设备和其他设备进行连接,实现设备之间的信息共享和智能化操作。
大功率短波发射机统一控制系统设计原理与应用
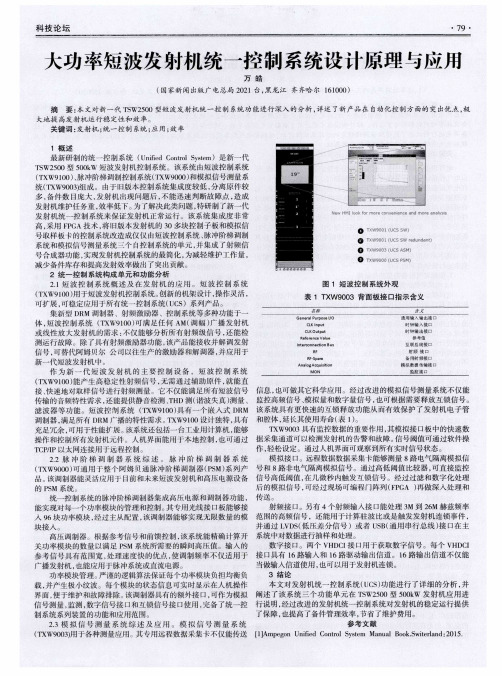
最新研制 的统一控制系统 ( U n i i f e d C o n t r o l S y s t e m)是新 一代 T S W2 5 0 0型 5 0 0 k W 短波发射机控制系统 。该 系统 由短波控制系统 ( T XW9 1 0 0 ) 、 脉 冲阶梯调制控制系统( F X W9 0 0 0 ) 和模拟信号测量系 统( F X W9 0 0 3 ) 组成。 南于 旧版本控制系统集成度较低 , 分离原 件较 多, 备件数 目庞大 , 发射机出现 问题后 , 不能迅速判断故障点 , 造成 发射机维护任务重 , 效率低下 。 为 了解决此类 问题 , 特研制了新一代 发射 机统一控制 系统来 保证发射机正 常运 行。该 系统 集成度 非常 高, 采用 F P G A技术 , 将 旧版本发射机的 3 0多块控制 子板 和模 拟信 o T x w g o 0 1 ( u c s s w ) 号取样板卡的控制系统改造成仅仅 由短 波控 制系统 、 脉 冲阶梯调制 O T  ̄ w g 0 0 1 ( U C S S W l e d u n d a n t 系统和模拟信号测量 系统 _ 二个 自控制 系统 的单 元 , 并集成 l 『 射频信 o T x w g 0 0 3 ( u c s A S M ) 号合成器功能 实现发射机控制系统的最简化 , 为减轻 维护工作量 , o T X W 9 0 0 0 ( U C S P S M ) 减少备件库存和提高发射效率做 出了突 } f j 贡献 。 2 统 一 控 制 系统 构 成 单 元 和功 能分 析 2 . 1短 波控 制 系统 概 述及 在 发 射 机 的应 用 。短 波 控 制 系统 图 1 短 波 控 制 系统 外 观 ( T X W9 1 0 0 ) 用于短波发射机控制系统 。 创新 的机架设计 , 操作灵 活 , 表1 T X W9 0 0 3 背面 板 接 口指 示 含 义 可 扩展 , 可稳定应用于所有统 一控制 系统 ( U C S )系列产 品。 集新 型 D R M调 制器 、射频激励器 、控制系统等多种功能于一 Ge n e r a l P u q ) o s e I / O 通用 输 入输 出接 口 体, 短波控制 系统 ( T X W9 1 0 0 ) 可满足任 何 A M( 调幅) 广播发 射机 CL K I npu t 时钟输 入接 口 CLK Ou tp ut 时钟输 出 接口 或 线性放大发射 机的需求 : 不仅能够 分析 所有射频级信 号 , 还 能检 R ef er enc e Val ue 参考值 测运行故 障。除 _ r 具有射频激励器功能 , 该 产品能接收并解调发射 I n t ef o0 nne ct I on B Us 互 联总 线接 口 RF 射频 接 口 信号 , 可替代阿姆贝尔 公司以往生产的激励器和解调器 , 并应用于 RF ・ S par e 备用射 频接 口 新一代短波发射机 中。 A n a l o g Ac q u i s i t i o n 横拟 数据 传输接 口 艟控 接 口 l 作 为新 一 代 短 波 发 射 机 的 主要 控 制 设 备 ,短 波 控 制 系 统 ( T X W9 1 0 0 ) 能产 生高稳定性射频信 号 , 无需通 过辅助原 件 , 就 能直 也可做其它科学应用。经过改进的模 拟信号测量系统不仅能 接、 快速地对取 样信号进行射频测量 。它 不仅能满 足所有短波信号 信 息 , 传输 的音频特性需求 , 还能提供静音检测 、 T HD测( 借波失真 ) 测量 、 监 控高频信号 、 模拟量和数字 量信 号 , 也可根据需要释放互锁信号 。 滤波 器等功能 。短波控制 系统 ( T X W9 1 0 0 ) 具有一个嵌 入式 D R M 该 系统 具有更快速 的互锁释放功能从 而有效保 护 了发射机 电子管 调制器 , 满 足所有 DR M广播 的特性需求 。 T X W9 1 0 0设计独特 , 具有 和腔体 , 延长其使用 寿命 ( 表1 ) 。 充足冗余 , 可用 于性能扩展 。 该系统还包括一 台工业用计算机 , 能够 T X W9 0 0 3具有监控数据的重要作用 , 其模 拟接 口板 中的快 速数 信号阈值可通过软件操 操 作 和 控 制 所 有 发 射 机 元件 。 人 机 界 面 能 用 于 本地 控 制 , 也 可 通 过 据采集通道可以检测发射机的告警 和故障。 作, 轻 松设 定。通过人机界面可观察到所有 实时信号状态 。 F C P h P以太网连接用 于远程控制 。 2 . 2脉 冲 阶 梯 调 制 器 系 统 综 述 脉 冲 阶 梯 涮 制 器 系 统 模拟接 口。远程数据数据采集卡能够测量 8路电气隔离模 拟信 可直接监控 ( T X W9 0 0 0 ) 可通用 于整个阿姆 贝通脉 冲阶梯调制 器 ( P S M) 系列产 号和 8路非电气隔离模拟信号 。通 过高低阈值 比较 器 , 在几微秒 内触发互锁信号 。经过过滤 和数字化处理 品 该调制器能灵活嘘厢 于 目前和未来短波发射机和高压 电源设备 信号高低阈值 , 的P S M 系统 。 后 的模拟信号 , 可经过现场 可编程门阵列 ( F P G A ) 再做深入处理 和 统 一 控 制 系统 的脉 冲 阶梯 调 制 器 集 成 高压 电 源 和 调 制器 功 能 , 传送 。 射频接 口。另有 4个射频输入接 口能处理 3 M到 2 6 M赫兹频率 能实现对 每一 个功率模块 的管理和控制。 其专用 光线 接 口板能够接 入9 6块功率模块 , 经过 主从配置 , 该调制器能够实现无限数量 的模 范 围的高频 信号 ,还 能用 于计算驻波 比或是触发发射机连 锁事 件 , 并通过 L V D S ( 低 压差分信号 )或 者 U S B ( 通用 串行总线 ) 接 口在 主 块接人。 高压 调制器 。根据参考信号和前馈控制 , 该系统 能精确计算开 系统中对数 据进行抽样 和处理 。 数字接 口。两个 V H D C I 接 口用于获取数字信号 。每个 V HD C I 关 功率模块 的数量以满足 P S M系统所需要的瞬间高压值 。输 入的 参 考信号具有范 围宽 . 处理 速度快的优点 , 使调制 频率不仅适 用于 接 口具有 1 6路输 入和 l 6路驱动输 出信道 。1 6路输 出信 道不仅能 当做输入信道使用 , 也 可以用于发射机连锁。 广播发射机 , 也 能应用于脉 冲系统或直流电源。
大功率多程式转动天线匹配网络的自动调谐控制系统建设
1 引言发射机和发射天线之间通常设置匹配网络,该匹配网络也叫调谐器,主要用于对天线进行调谐控制,使发射机与发射天线实现阻抗匹配,从而保证天线的发射达到最大的辐射效率。
我台正在投入运行的转动天线是我国自主研制的第一部500kW大功率多程式短波转动天线,其电压驻波比的技术指标要求在短波广播全频段内均小于1.1,从而实现低损耗、高效率传输。
为达到技术标准,转动天线筒体内采用了一套Π型匹配网络,可通过伺服系统进行自动调谐,使发射机不平衡50Ω单端输出变为25Ω单端输出,然后送到平衡转换器变为但是随着广播发射技术的不断发展,在实际应用中,发射系统往往包含多个发射天线,每副发射天线所呈现出的负载状态并不完全相同。
比如,我局近几年安装的多程式转动天线,一副转动天线通过4个程式开关切换组合成高频、低频共8副不同程式的发射天线。
如果采用分频段窄带固定匹配网络的调谐方式,则匹配网络的置获取模块110包括存储子模块1101、查找子模块1102、线性计算子模块1103和梯形计算子模块1104;位置调整获取模块112包括判断子模块1121和位置调整子模块1122。
下面结合图4对各模块的功能和工作原理进行介绍。
3.1.1 目标位置获取模块110该模块用于根据发射机的当前工作频率确定各调谐元件的调谐目标位摘要:本文对短波发射机天线匹配网络的几种调配方法进行了简单的介绍,对国产500kW大功率多程式转动天线Π型匹配网络自动调谐控制系统的设计思路、理论算法和控制方法进行了分析和阐述,并介绍了转动天线的实际应用情况。
关健词:模块功能 匹配网络多程式转动天线 自动调谐控制装置控制方法 应用图1窄带固定匹配网络86 . 87. 置,具有四个子模块,具体情况如下。
(1)存储子模块1101用于预先存储发射机的工作频率与各个调谐元件位置的对应关系信息,即原始调机数据,调机时,由人工按照一定的频率间隔进行调试存储。
(2)查找子模块1102用于获取发射机的当前工作频率,根据当前工作频率,在存储子模块所存储的对应关系信息中,进行匹配查找,并将查找到的各个调谐元件的调谐位置作为调谐目标位置。
国产500kW短波转动天线控制系统的改造
国产500kW短波转动天线控制系统的改造文章对国产500KW短波转动天线组成进行了简单的阐述,同时介绍了该系统在运行当中出现的问题及改造。
希望通过文章的综合论述,可以为相关工作人员提供理论借鉴和帮助,仅供参考。
标签:大功率短波转动天线;天线控制系统;手动控制系统;变频器;抱闸1 概述500kW短波转动天线是由北京北广科技股份有限公司生产的,它是国内首创的大功率转动天线。
500kW短波发射机的成功研制和完全国产化,结束了我们国内不能自主生产150kW以上级别大功率短波发射机的历史,改变了我国在大功率短波机领域主要依赖于进口的现状,推动国内整个广电产业的发展。
2 转动天线的组成大功率短波转动天线高78米,总重量308.8吨,由转动天线基础、钢结构和塔桅结构、机械传动结构、天馈线系统网络、转动天线控制系统等部分组成。
包含底部基础、圆筒塔身、中心塔桅、反射幕中心支撑架、支撑平台、平台斜支撑、反射幕外支撑架、高频振子、低频振子、振子支撑、天线检查用负荷绳等组成。
3 转动天线控制系统天线控制系统主要实现对驱动马达、变频器、辅助风扇、刹车马达、程式开关、风流量、水流量、水温、水位、水阻、弧光监测、调谐位置、紧急按钮、天线角度、闭锁信号等的监测,同时还可以实现对变频器、刹车马达、程式开关、风、水、天线角度、频率的控制。
采用了两组PLC可编程控制器作为下位机,一组为筒体控制系统,主要实现筒体转动的控制,采用了欧姆龙的CJ1G;另一组ATU控制系统,只要实现对冷却系统、程式开关切换、电容电感调谐等的控制。
下位机采样外围电路的各个开关状态进行逻辑判断来实现对外围电路的控制,同时上传给上位机,包括各种操作信息和告警信息,天控系统上位机再把这些状态信息、高警信息和操作信息上传给机房平台,作为机房平台的监测内容,上位机和下位机之间采用了RS232串口通信。
机房控制柜与筒体控制柜之间采用了RS485串口通信。
4 转动天线在试运行中出现的问题及处理转动天线在试运行当中出现了一些问题及在以外情况下对筒体的保护存在一些隐患,下面对这些问题和隐患分析处理进行总结:4.1 转动天线启动时经常出现:“刹车马达未打开”,天线无法转动天线转动控制的原理:刹车马达是由电磁闸式电机和刹车皮组成,天线在静止状态时电机处于静止状态,刹车皮通过弹簧的机械应力处于抱闸状态,防止因外力造成天线角度偏离。
基于PLC的大功率短波转动天线远程控制系统的设计与实现
基于PLC的大功率短波转动天线远程控制系统的设计与实现本文对转动天线的远程控制系统的系统总体设计思路进行阐述,重点介绍了基于AB slc500处理模块的系统硬件设计思路,采用RSLogix500、RSView32、SCADA等方法的软件结构结构。
关健词:转动天线;远程控制;slc5001 前言我台安装了1副汤姆逊公司生产的全方位、全波段、多组态、大功率短波发射转动天线,该套设备是当前世界上较先进的短波发送设备。
为保障该套设备的稳定、高效工作的运行,实现全局总体信息化平台建设,我台的远程控制系统技术方案提出了在转动天线发射系统台区按照有人留守、无人值班的工作模式进行建设,在1.5公里外的主台区建立监控机房,运行远程控制系统,远程控制和监测转动天线发射系统的运行状况。
2 远程控制系统设计转动天线远程控制系统要实现的目标:通过远程监控系统对发射机和转动天线实行控制,即要按照节目运行图,发布指令,实现发射机换频、换天线、切换天线程式、变换天线方向等,原发射机和天线的本地控制两系统间必须有连锁,以确保高压闭合的安全。
系统要开放通信接口协议,具备很好的扩展性,实现在主台区的中心监控机房集成包括主台区、转动天线发射系统台区的发射机及天线自动控制系统在内的所有自动化系统。
2.1 硬件结构远程控制系统的硬件架构框图如图1所示,包括远程控制终端、发射机本地控制系统、转动天线控制系统、音频开关及室内环境监控系统四部分。
远程控制终端位于主台区的中心监控机房,用来监控机房的发射机、转动天线、音频开关及室内环境,可以选择自动或手动模式,自动模式能够按照运行图实现发射机、转动天線的自动运行,手动模式可以根据发射机、天线的状态反馈信息手动控制。
远程控制终端采用热备份冗余方式,包括主用工控机和热备用工控机,主、备工控机同时连接数据采集网络和计算机网络,在主用工控机崩溃的情况下,热备用工控机自动被激活,并且接管所有的自动控制操作,同时还会将数据输送到计算机网络中。
基于PLC管道探伤中无线遥控系统设计+毕业设计

管道探伤中无线遥控系统设计摘要所谓遥控既是控制,控制机器人的运行并确定其精确位置,既是运动控制和示踪定位。
传统技术采用拖缆工作方式,电缆与管壁间存在摩擦力信号长距离输送不稳定,严重限制了管道探伤机器人的行走距离。
而普通遥控往往是短波,传播距离近,传播过程中损耗大,因此,示踪定位和遥控技术已经成为管道工程领域急需解决的难题。
本文将超长波示踪定位系统分为发射和接收两部分进行设计研制。
通过发射一定频率的电磁波,接收装置接收过来之后通过示踪定位算法确定机器人的位置。
运动控制部分也分为发射和接收部分,发射部分发射三种不同频率的电磁波,分别完成前进后退停止三种功能。
由于超长波在传播过程中会有一定程度的衰减且受到外界的干扰,因此本文设计的接收系统通过滤波放大器对接收天线采集的信号进行处理,并利用USB2000A数据采集卡将信号传送至上位机。
关键词:运动控制,示踪定位,超长波,发射系统,接收系统Design of Wireless Remote Control System for PipelineInspectionABSTRACTThe localizationtechnique means people can monitor the behaviour of pipeline robot on line, such as the site of the robot, the state of robot and the environment of pipeline, which can improve efficiency. Traditional localization technique adopts the wire, because of the frictional force between cable and pipe wall and the limitation of wire, this method limits the working distance.So thelocalization technique of pipeline robot is a key technology which decides theapplication of robot in pipeline.This article myriametric wave tracer positioning system can be divided into two parts, transmit and receive design development. By emitting a certain frequency electromagnetic wave, the receiver to receive after come through tracer positioning algorithm that determines the location of the robot. Motion control part is also divided into transmitting and receiving part, launch part three different frequency of electromagnetic waves, stop going back three functions respectively. Because of super long wave in the transmission process will have a certain degree of attenuation and interference from the outside world, therefore the receiving system designed in this paper through the filter amplifier for receiving antenna acquisition of signal processing, and using data acquisition card signal will be supreme USB2000A machine.KEY WORDS: Motion control, Tracer positioning , emission system, receiving system目录前言 (1)第1章示踪定位技术与课题研究 (1)1.1示踪定位技术国内外研究现状 (1)1.1.1国外研究现状 (1)1.1.2国内研究现状 (2)1.2失踪定位技术在管道工程中的应用 (2)1.3本文研究的主要内容 (2)第2章超长波发射系统设计 (4)2.1整体发射系统设计 (4)2.2超低频信号发生器的设计 (5)2.3发射系统功率放大器设计 (10)2.4超长波发射天线设计 (11)2.4.1天线的基本理论 (12)2.4.2发射天线的设计 (12)2.5超长波发射系统控制器设计 (13)2.5.1电源系统设计 (14)2.5.2基于CAN总线的管内通讯 (16)第3章超长波接收系统的设计 (18)3.1超长波整体接收系统设计 (18)3.2超长波接收天线设计 (19)3.3超长波信号滤波放大器设计 (21)第4章运动控制系统的设计 (25)4.1运动控制发射装置的设计 (25)4.2运动控制接收装置的设计 (26)第5章系统的调试与仿真 (28)5.1 软件的调试 (28)5.2系统的仿真 (29)5.2.1 基于超长波发射系统的仿真 (29)5.2.2 基于超长波接收系统的仿真 (30)结论 (31)谢辞 (32)参考文献 (33)附录 (35)外文资料翻译 (45)前言随着交通、石油、化工以及城市建设的飞速发展,管道作为一种经济、高效的物料长距离运输手段而倍受人们的关注,被广泛的铺设于世界各地、陆地、海洋等环境中。
基于PLC的DF100A短波发射机全自动控制系统改造设想

基于PLC的DF100A短波发射机全自动控制系统改造设想王静婉【摘要】文章通过详细分析当前DF100A控制系统手自动控制原理,设想用PLC 的全自动工作模式取代当前手自动控制共存的模式,减少手动控制复杂线路带来维护工作量和故障增多.【期刊名称】《无线互联科技》【年(卷),期】2018(015)005【总页数】3页(P9-10,37)【关键词】DF100A;自动控制系统;PLC【作者】王静婉【作者单位】国家新闻出版广电总局641台,福建泉州 362100【正文语种】中文1 DF100A控制系统DF100A控制系统包含了控制及过荷保护继电器系统,调谐控制系统,PSM调制器控制系统三大块。
其中控制及过荷继电器系统用于控制发射机开关机顺序控制及故障保护,调谐系统用于控制发射机伺服传动机构和频率控制。
两个系统共同位于发射机的一单元,都采用了手动继电器控制和可编程逻辑控制器(Programmable Logic Controller,PLC)自动化控制相结合的方式。
DF100A 的自动化控制是在原先手动控制线路的基础上,并不是一个以自动化控制设计为最初设计目标设计的。
以下详细介绍该手自动控制系统的工作原理。
1.1 继电器控制保护系统的手自动原理手动控制采用了传统的按钮、位移开关与继电器、接触器结合的方式。
如图1所示,是一个基本的开机和关机控制。
自动化线路是在原先手动控制的基础上,增加了继电器中继板11A3A1,由PLC输出的继电器接点控制继电器线路。
当6S16切换到手动控制时,线路由按钮启控触发;当切换到自动状态时,11A3A1输出控制板的所有继电器一端得到24 V电源,另一端受PLC输出控制是否启控,当对应的继电器启控时,就替代按钮作用工作。
1.2 调谐系统控制手自动原理1.2.1 调谐元件手自动控制DF100A调谐系统包含了8套传动装置和频率的控制,如图2所示。
8套传动装置的控制上由调谐单元6A2、调谐马达组件、遥控接口板、调谐驱动板卡组成,其采用了分散式电路控制的方式控制伺服传动机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的大功率短波转动天线远程控制系统的设计与实现摘要:本文对转动天线的远程控制系统的系统总体设计思路进行阐述,重点介绍了基于ab slc500处理模块的系统硬件设计思路,采用rslogix500、rsview32、scada等方法的软件结构结构。
关健词:转动天线;远程控制;slc500
1 前言
我台安装了1副汤姆逊公司生产的全方位、全波段、多组态、大功率短波发射转动天线,该套设备是当前世界上较先进的短波发送设备。
为保障该套设备的稳定、高效工作的运行,实现全局总体信息化平台建设,我台的远程控制系统技术方案提出了在转动天线发射系统台区按照有人留守、无人值班的工作模式进行建设,在1.5公里外的主台区建立监控机房,运行远程控制系统,远程控制和监测转动天线发射系统的运行状况。
2 远程控制系统设计
转动天线远程控制系统要实现的目标:通过远程监控系统对发射机和转动天线实行控制,即要按照节目运行图,发布指令,实现发射机换频、换天线、切换天线程式、变换天线方向等,原发射机和天线的本地控制两系统间必须有连锁,以确保高压闭合的安全。
系统要开放通信接口协议,具备很好的扩展性,实现在主台区的中心监控机房集成包括主台区、转动天线发射系统台区的发射机及天线自动控制系统在内的所有自动化系统。
2.1 硬件结构
远程控制系统的硬件架构框图如图1所示,包括远程控制终端、发射机本地控制系统、转动天线控制系统、音频开关及室内环境监控系统四部分。
远程控制终端位于主台区的中心监控机房,用来监控机房的发射机、转动天线、音频开关及室内环境,可以选择自动或手动模式,自动模式能够按照运行图实现发射机、转动天线的自动运行,手动模式可以根据发射机、天线的状态反馈信息手动控制。
远程控制终端采用热备份冗余方式,包括主用工控机和热备用工控机,主、备工控机同时连接数据采集网络和计算机网络,在主用工控机崩溃的情况下,热备用工控机自动被激活,并且接管所有的自动控制操作,同时还会将数据输送到计算机网络中。
转动天线本地控制系统硬件均使用一个型号为slc500系列的allen-bradlery设计的处理器模块,以及相应的数字和模拟的输入输出模块,用户操作界面是安装在控制柜前面的触摸屏panelview 1000。
远程控制系统使用工业级工控机为上位机管理平台,通过micrologix 1000完成控制任务,同时,利用以太网与发射机自动化系统进行数据通信,提取关键信息,作为整个发送系统远程控制系统工作的依据。
远程控制终端通过光猫及光纤分配器,利用一根长2.5公里的8芯光缆连接机房的控制系统,实现rs-232接口间点对点的通信。
其中三对芯分别连接控制发射机、转动天线、音频开关及室内环境
的计算机或plc,另外一对芯备用。
2.2 软件结构
远程控制系统的软件结构如图2所示,该系统软件设计为采用rslogix500编程语言、rsview32、 scada系统等作为软件的主要开发工具;远程控制终端与机房的本地控制系统之间采用ab公司的df1协议、通过串口通讯,符合工业标准,兼顾了效率及可靠性;通过光猫及光纤分配器转成光信号传输,有效解决了主台区与机房台区之间利用串口协议传输距离过远以及电磁干扰的问题,保证了传输的可靠性;中心监控机房与机房之间的通讯出现故障时,机房的发射机、天线、室内环境等本地监控系统能够切换到本地模式独立运行,保证了设备运行的独立性及安全性。
系统采用模块分级结构,可以实现控制系统的逐步设计及实施。
从一个简单的数据采集单元开始,上升到全台中央自动控制网络,采用层次化的模块分级结构,有利于我们根据电台的实际情况灵活地增减、修改系统功能、系统配置等。
2.2.1 stationmaster(plus)及scada系统
图3为远程控制系统主界面,为了控制系统,可以通过stationmaster plus系统的hmi以各种方式来存取它。
stationmaster plus控制系统可以被分为两个部分:低级别的基本单元和stationmaster plus应用。
多任务和多用户的操作系统属于最低级别,它执行基本的输入和输出操作以及用户和运行程序的管理。
scada系统属于一个高的级别,它是负责实时数据的采集以及对所要控制的设备进行命令输出。
scada系统装有一个数据库,在通信线路操作正确的情况下,这个数据库还包含一个设备的任何时间的真实状态图象。
除此以外,scada系统还控制低级别数据库的存取、数据库定义和取样比率。
这个dbc级别还用做scada系统外部与自动控制模块station master plus之间的双向数据接口。
tcp-服务器用于通信连接,将数据从数据库传送到stationmaster plus,反之亦然。
图形工具slgms作为一个hmi,充当一个可理解的、人类工程学的中间阶层,负责在用户和控制系统之间交换命令和信息。
从tcp-服务器上接收到的数据是在stationmaster plus中被处理的,然后通过图形模块系统被显示在屏幕上。
在处理过程中,输入的数据被自动地记录在列表中,一个负责所有输入事件的后台demon模块会检查是否传输时间表的自动执行受到任何影响。
stationmaster plus的自动控制模块会同时向发射机、天线控制系统以及音频matrix发送必要的命令。
图形模型系统不仅显示信息,而且也可以获得鼠标指示器的运动,鼠标点击以及键盘的输入。
这些数据被送到stationmaster plus 并被核查。
同此,错误操作绝大部分都被排除在。
图形模型系统和stationmaster程序都是独立于所使用的操作系统的,因此,当操作系统或计算机平台被改变时,能够对所投入的资本提供高程度的保护。
2.2.2 rtu的数据采集
rtu是一个自给自足的计算机系统,它具有一个程序接口。
各自的软件包可以根据自己的思想对系统的功能进行改变和扩展。
该方式可以使主计算机被安置地尽可能远,而且还可以接收大部分已经被处理的数据。
rtu程序可以获得低级别的一致性,使发射机、天线控制系统、综合报告都在一个中央控制系统中被合并,然后以一个基本相同的函数在操作屏幕上显示给操作者。
数据采集和程序控制原理:micrologix1000程序逻辑控制器被设定为带有自动控制功能的“智能”远程终端单元。
其中:bi 为二进制输入,bo 二进制输出,si为系列接口。
3 结束语
我台远程控制系统的应用,改变了大功率短波发射机传统的运行、操作模式,在减轻值班人员工作强度,降低人为操作故障,在提高设备的稳定和可靠性方面起到了很好的效果,为电台实现有人留守,无人值班奠定基础。