利用线阵CCD自动测量航空相机镜头的焦距
光电检测与显示实验五 线阵CCD应用实验
实验5 线阵 C CD 应用实验电荷耦合器件(Charge coupled devices)是70年代初期发现的新型集成光电传感器件。
它有线阵列与面阵列两种基本类型,各有不同的工作原理与特性。
它们的应用为机器视觉领域的改革创新立下了汗马功劳,使机器有了获取70%以上信息的能力,加之它易于与计算机配合,使机器安装“眼睛”与“大脑”成为可能,使机器走向自动化、智能化的趋势进入现实阶段。
线阵CCD的工作原理简单,易于掌握,而它在机器视觉领域的地位举足轻重。
线阵CCD 通常用于工业领域的非接触自动检测设备上,尤其是自动化生产过程或生产线上,用作在线非接触光电检测设备或俗称为“电眼”。
非接触检测物体的尺寸、运动速度、加速度、运动规律、位置、面形、粗糙度、变形量、光学特性变化、条码信息和其他应用。
本实验共有9 项实验容,前2 项实验属于原理性或认识性实验,实验3~9 属于典型应用的实验,学生通过这些代表性的应用实验能够充分认识与理解线阵CCD 在工业领域非接触测量工作中的重要地位。
(一)线阵CCD 原理与驱动特性一、实验目的1、掌握彩色线阵CCD开发应用实验仪的基本操作和功能。
2、掌握用双踪迹示波器观测二相线阵CCD驱动脉冲的频率、幅度、周期和各路驱动脉冲之间的相位关系等测量方法。
3、通过对典型线阵CCD 驱动脉冲的时序和相位关系的观测,掌握二相线阵CCD的基本工作原理,尤其要掌握RS 复位脉冲与CR1、CR2 驱动脉冲间的相位关系,分析它对CCD输出信号的影响。
SH转移脉冲与CR1、CR2驱动脉冲间的相位关系,掌握电荷转移的几个过程。
二、实验仪器1.LCCDAD-Ⅱ-A型线阵CCD应用开发实验仪一台;2.装有VC++软件及相关实验软件的PC计算机一台;3.双踪迹同步示波器(推荐使用数字示波器,带宽应在50MHz以上)一台;三、实验容及步骤1.实验预备(1)首先将示波器的地线与实验仪上的接地线连接好,并确认示波器和实验仪的电源插头均已插入交流220V电源插座上;(2)取出双踪迹同步示波器的测试探头待用;(3)打开示波器的电源开关,选择自动测试方式(按下示波器右上角“自动设置”按钮),旋转“垂直设置”旋钮,调整显示屏上出现的扫描线处于便于观图1-1线阵CCD的参数设置界面察的位置;(4)通过USB总线将实验仪与计算机或GDS-Ⅲ实验平台的USB输入端口相连;(5)将LCCDAD-Ⅱ-A型线阵CCD应用开发实验仪的电源开关打开,红色指示灯亮;(6)启动计算机,打开桌面上的快捷方式“线阵CCD”,点击“1-LV”,弹出如图1-1所示的执行界面,点击需要设置的参数,该参数会以较大数字显示在下方,用鼠标点击“设置”,完成设置工作。
相机镜头焦距自动测量系统的设计及精度分析

中图分 类号 ; P 7 T 24
文献标识码 : A
相 机 镜 头 焦 距 自动 测 量 系统 的 设 计 及精 度分 析
赵 育 象, 李开端
( 海军航空工 程学院 青岛分院,山东 青岛 264) 6 0 1 摘要 :提 出了一种 以线 阵 C D传感器取代读 数显微镜 ,以 85 C 2 3可编程芯 片实现 自动测量并 实时显示测量结果的相
1 。 )
兰 骨 _
黼
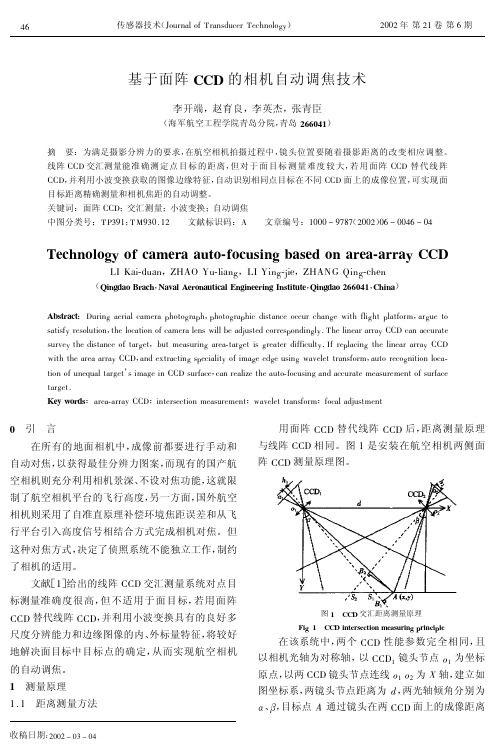
图 1 测 量 系 统 原理 图
,
. . . .
,
:
即 , 一
Jc
() 1
)
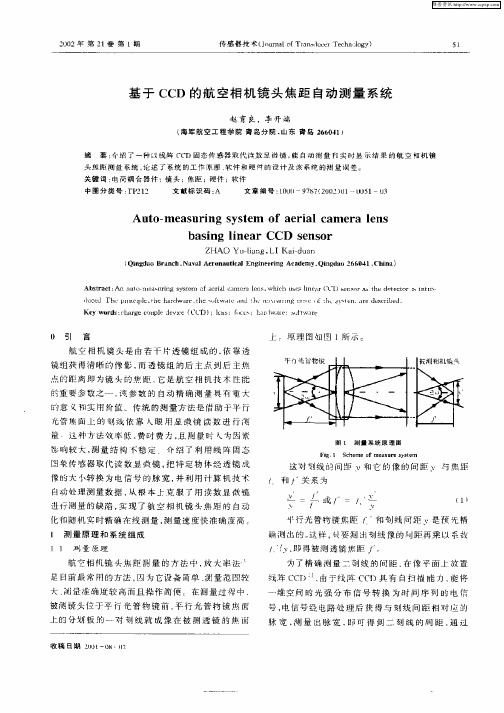
平 行光 管物 镜 焦距 和刻 线 间距 Y是 预先 精 确 测 出 的 。 样 , 要 测 出 刻 线 象 的 同 距 再 乘 以 系数 这 只 , , r 即得被 测透镜 焦 距 - r 。
机镜 头 焦 距 测量 系统 ; 述 了系 统 的 工 作 原 理 和软 硬 件 的 实现 , 析 了系 统 的 删 量 误 差 ; 明 了 系 统 的可 行 性 和先 进 性 , 论 丹 证
系统具有较高 的实用价值 和应 用前景
关 键 词 ห้องสมุดไป่ตู้线 阵 C D;相 机 ;镜 头 ;焦 距 C
De i n a d Ae ur e s g n c a y Ana y i f Ca e a Le e s r n y t m l s s o m r ns M a u i g S s e
Ke y wor s{ ln rCCD ;c m e a; ln d i ea a r e s; f c o us
l j 言 I
相 机镜头是 由若 干片 正负透 镜 组成 的 ,它依 靠透 镜 组 成像获得 清 晰 的像影 ,而透 镜 组的 后主 点到 后 主 焦点的距 离 即 为镜 头 的焦距 ,它直接 影 响物体 成像 的 大小, 并影 响透 光能 力的强 弱 、 头视 角的大 小 以及景 镜 深 长短 , 是相 机 技术性 能 的重要 参数之 一 , 参数 的 自 该 动精确测 量具 有重 大的 意 义和 实用价 值 。传统 的测 量 方 法是借 助于 平行 光管 焦面 上 的刻线 依 靠人眼 用 显微 镜 读数进 行测 量 。 种方 法效 率 低 , 这 费时费力 , 测量 且 时 』 为因素影 响较 大 , 量结构 不稳 定 。 、 测 l 本文 介 绍了一 种 新 型的设计 方 案 , 系统 利用 线阵 C D 图像 传感 器取 C
非量测CCD数码相机的航空摄影测量应用
Key words:camera calibration;photogrammetry;bundle adjustment;relative orientation
0引 言
国际上数码相机系统研制开发和应用的成果,充分 显示了CCD数码相机已向传统的航空摄影发出了挑 战…。自国际最著名的测量仪器生产巨头蔡司和莱卡推 出大幅面阵和线阵航空数码相机DMC和ADS40以来,13 本、奥地利和乌克兰等国家也先后研制出类似的产品,如 TLS.UCD,DiMAC等。但是,这些航空数码相机价格昂 贵,不适于其在中国等发展中国家的大面积推广和应用, 航空胶片相机仍然占据国内航空摄影的主流。而用于非 量测目的的CCD数码相机价格低廉,发展迅速,性能与操 作上较灵活方便,随着数字图像处理、模式识别等理论和 技术以及数码相机标定技术不断的完善,标定精度不断 提高,普通CCD数码相机已应用于计算机视觉、摄影测量 领域旧1。本文基于数字摄影测量、计算机视觉的理论研 究普通的大面阵数码相机系统量测化,并应用于航空摄
1)相对定向与模型连接
每条航带的中间像对作为起始像对,分别向左、右方 向进行相对定向和模型连接;
2)基于三视张量剔除粗差 相邻的三张影像(可以是同航带也可以是不同航带 的三张相邻影像)建立三视立体,分别计算其投影矩阵, 并基于三视张量剔除粗差; 3)自由航带网平差剔除粗差 构建自由的航带网,以获取的外方位元素作为带权 的虚拟观测值、像点坐标作为观测值,进行单航带的自由 网平差,剔除像点坐标残差大于3倍单位权中误差(30 lira)的点; 4)航带绝对定向 具有足够重叠的旁向立体像对基于自动相对定向自 动转点,或者相邻航带的两端和中间选择大于lO个的多 度重叠的连接点相互半自动转点。这些点作为本航带绝 对定向的“控制点”,对本航带建立的自由航带网进行近 似的绝对定向,本航带归化到与前面航带一致的坐标系; 5)旁向立体匹配自动转点 相邻航带建立旁向立体像对,基于核线约束的立体 匹配,自动转点,基于三视张量剔除粗差; 6)自由局域网光束法平差 与前面所有的航带相连,构建自由的局域网,进行自 由网平差,剔除粗差点。 利用少量的控制点以GPS\IMU值作为带权观测值的 光束法区域网平差。
CCD技术及应用实验利用线阵CCD进行物体尺寸测量(精)

CCD技术及应用实验:利用线阵CCD进行物体尺寸测量一、实验目的通过本实验掌握利用线阵CCD进行非接触测量物体尺寸的基本原理和方法,用实例探讨影响测量范围、测量精度的主要因素,为今后设计提供重要依据。
二、实验准备内容1.利用线阵CCD进行非接触测量物体尺寸的基本原理线阵CCD的输出信号包含了CCD各个像元所接收光强度的分布和像元位置的信息,使它在物体尺寸和位置检测中显示出十分重要的应用价值。
CCD输出信号的二值化处理常用于物体外形尺寸、物体位置、物体震动(振动)等的测量。
如图3-1所示为测量物体外形尺寸(例如棒材的直径D)的原理图。
将被测物体A置于成像物镜的物方视场中,将线阵CCD像敏面恰好安装在成像物镜的最佳像面位置上。
当被均匀照明的被测物体A通过成像物镜成像到CCD的像敏面上时,被测物体像黑白分明的光强分布使得相应像敏单元上存储载荷了被测物尺寸信息的电荷包,通过CCD及其驱动器将载有尺寸信息的电荷包转换为如图3-1右侧所示的时序电压信号(输出波形)。
根据输出波形,可以测得物体A 在像方的尺寸D',再根据成像物镜的物像关系,找出光学成像系统的放大倍率β,便可以用下面公式计算出物体A的实际尺寸Dβ/=(3-1)D'D显然,只要求出D',就不难测出物体A的实际尺寸D。
线阵CCD的输出信号U O随光强的变化关系为线形的,因此,可用U O模拟光强分布。
采用二值化处理方法将物体边界信息(图3-1中的N1与N2)检测出来是简单快捷的方法。
有了物体边界信息便可以进行上述测量工作。
2.二值化处理方法图3-2所示为典型CCD输出信号与二值化处理的时序图。
图中FC信号为行同步脉冲,FC的上升沿对应于CCD的第一个有效像元输出信号,其下降沿为整个输出周期的结束。
U G为绿色组分光的输出信号,它为经过反相放大后的输出电压信号。
为了提取图3-2所示U G的信号所表征的边缘信息,采用如图3-3所示的固定阈值二值化处理电路。
面阵CCD航空相机的自动对焦技术研究

ln l b orso dn l dutd a tmai me srme to e o jc it c d c mea e s wi e c r p n igy ajs uo t aue n f t be tds n e a a r l e e c h a n
a t m a c f c sng a e c ri d o tby me n ft e i g dg ha a trsi sa hi v d by pl a r a u o t o u i r a re u a s o h ma e e e c r ce tc c e e a r a r y i i n CCD h o gh wa e e a s o nd CCD n e s c onr n nd ngprncpl . tr u v l t n f r a r t m i t r e t a gef i i i e i i
L i unZ I - a , HAO ul n , n  ̄ e Z Ka d Y -a g LI g i, HANG n -h n i Yi Qigt e ( n d oB a c N v l eo a t a n ie r g Qig a rn ho a a rn ui l gn ei f A c E n
实现 目标距 离 自动测 量 和 相机 自动 对 焦 。
关键词 :航 空相机; 面阵 C D 自动对 焦: C; 交汇测量 ;小波变换
中图分 类 号 :V256 4. 文 献标 识 码 :A
S u yo t m ai c i gT c i u s d o t d n Au o tcFo usn e hn q eBa e n Pl n rAr a a a r y CCD o r a m e a f rAe i l Ca r
基于CCD摄像头的航空相机最佳成像位置定位系统

传感器与微系统(T ransducer and M icrosy stem T echnolog ies) 2009年第28卷第10期基于CCD摄像头的航空相机最佳成像位置定位系统*赵 梅1,沙宇芳1,王芳荣2(1.空军航空大学特种专业系,吉林长春130022;2.吉林大学通信工程学院,吉林长春130025)摘 要:航空相机用来获得地面图像信息,是圆满完成侦察任务的重要的前提条件。
提出了一种定位航空相机最佳成像位置的系统,论述了系统的工作原理、硬件组成。
该系统采用光学准直系统产生定位信息,利用CCD摄像头作光电转换器件接收图像,采用最小二乘法处理数据,由测控系统控制摄像头轴向的精确平移,根据采集的图像尺寸定位相机的最佳成像位置,利用实际成像面与最佳成像位置之间的距离判断是否离焦。
通过对多部航空相机进行测试,是否离焦的判断与试飞结果完全相同。
关键词:航空相机;最佳成像位置;最小二乘法;定位;CCD摄像头中图分类号:T N286.5 文献标识码:A 文章编号:1000 9787(2009)10 0094 03Locating system of optimum imaging position of aerialcameras with CCD cameras*ZH AO M ei1,SH A Yu fang1,WANG Fang ro ng2(1.Department of Special Service,Aviation University of Air Force,Changchun130022,C hina;2.College of Communication Engineering,Jilin University,C hangchun130025,China)Abstract:Aer ial camer as are used to obtain gr ound image,and t heir availabilities are the preco ndition toco mplete reconnaissance task sat isfacto rily,A lo cat ing sy st em of o pt imum imag e positio n of aer ial camerasis described.T he locating info rmation is pr oduced by co llimato r.T he o ptimum image positio n is determinedby size o f the collecting imag e w ith ar ea CCD camera and least square method.Off focus o r no t is judgedbased on the distance between the real image po sitio n and the o ptimum imag e posit ion.T hr ough the tests o fmultiple aer ial camer as,the est imatio n o f off focus or not is similar w ith flight r esult with t he system.Key words:aerial camera;optimum imag e po sitio n;least square method;locating;CCD camer as0 引 言航空相机用来获得地面图像信息,它的镜头是由若干透镜组成的。
基于面阵CCD的航空摄影高度自动测量及调焦

0 引 言
为避 免航 空像 机 在成像 过程 中摄影 高度 的改 变 引起 的成像 分 辩率 的 下 降 ,需要 有 自动 调 焦 .国产 航 空 像 机在 成像 过程 中 , 部采 用 定焦 方式 工作 ,而 国外 产航 空像 机 自动调 焦则 采 用 从飞 行 平 台 自动 引入 高 度 全
一
d h ia+ f o a ( sn c s)
= ‘ ( 2)
Y 一
当用面 阵 C CD 测量 航空像 机摄 影高度 时 , 其测 量 目标 非点 目标而是 面 目标 , 就要 求 测量 系统 能从 面 这 目标 中找 出同一个 点 目标 在不 同面 阵 C D 的像 , C 这样 才可 以利 用线 阵 C D 交 汇测 量原 理测 量航 空像 机 的 C 摄 影高 度 ,并 以此为 基础 实现 航空像 机 的 自动 调焦 .
C D 测 量结 果 ,点 目标距 离 Y为 C
、, 一
( 1 h ) c s 口一 )一 ( 12+ )i ( ^ 一 2f o ( ^h sn 口一 ) ’
一
! 垒
±
! 垒
± c l
Байду номын сангаас
,、
式 中 :d为两 C D 间距离 ; h 为 同一 目标在 两 C D 面 的成像 高 度 ; 为 C D 镜头 焦距 ; ,a为 C h, z C 厂 C C D 镜 头倾 角 . C 根 据 文献 [ ] 出的 系统 的最 优化 结 构布 局条 件 : 一 一a 1给 ,并 且 为保证 测 距 系统 在 实 测距 离 时计 算 方 便 ,目标 点选择 像机 主 光轴与 地面交 点 , h 一 - h 一^,在此条 件 下 ,目标 点 Y坐 标 ,即 像机 拍照 距离 为 即 。
利用线阵CCD实现航空相机镜头焦距的自动测量

航 空相 机镜 头 焦 距测 量 的方 法 中 , 大 率 放 为 了精 确 测 量 两 刻 线 的 间距 , 像平 面 上 在 法 是 目前 最 常 用 的 方 法 , 为 它 设 备 简 单 、 量 放 置 线 阵 C D, 因 测 C 由于 线 阵 C D 具 有 自扫 描 能 C
维普资讯
A bs r t: n hi p t ac I t s ape an a o— eas i ys em er c r, ut m ur ng s t of a o— am er e f us, hi h a l ns oc w c us i a CD e or a he et c or, s i r duc es lne r C s ns s t d e t i nt o ed.The pr nc pl , he ha d a e。 he i i e t r w r t
精 确 测 量具 有重 大 的意 义和 实用 价值 。传 统 的 的 间 距 Y与 焦 距 和 有 如 下 关 系 ( 图 1 : 见 )
测 量 方 法 是 借 助 于 平 行 光 管 焦 面 上 的刻 线 依 靠
. .
Hale Waihona Puke , :..
,
专 或 , =
() 1
人 眼观察 显微镜 读 数进 行 测 量 。这 种方 法效 率
/ / /
『\ 、
.
图 1 测 量 系 统 原 理 圈
1 测 量 原 理 和 系 统 组 成
1 1 测 量 原 理 .
平 行 光管 物 镜焦距 和 刻线 间距 Y是 预先 精 确测 出 的 。 样 , 这 只要测 出刻 线像的 间距 再 乘
以系数 , 得被 测透 镜焦 距 , 。 即
基于线阵CCD的航空相机镜头焦面的自动定位系统
维普资讯
20 0 2年 4月 第 2 2卷 第 2期
宇 航 计 测 技 术
J u n lo to a tcM er l ̄ o r a fAsr n ui too
A PR. 2 0 .0 2
V . 22. 0 N 2
文章 编 号 :0 0—7 0 (0 2 2—0 3 —0 10 2 2 2 0 )o 03 4
微 镜读 数进行 测 量 。 种 方 法效 率 低 , 时 费力 , 测量 列 人为 因素 影 响较 大 , 量 结 构不稳 这 费 且 测 定 而 最 近 一 些 文 献 中 出 现 了 一 种 新 的 利 用 线 阵 固 态 C D 传感 器 替 代 读 数 显 微 镜 的 新 的 测 量 一 C
点 。 实 际 上 , 照 波 动 光 学 但 按 的观 点 , 当平 行 人 射 光 波 通 过
相 机镜 头 时 , 过 镜 头 光 阑会 通
产 生衍 射 , 所 在 焦 平 面 上 , 实 际 不 是 一 个 几 何 光 点 , 是 而 由 中 心 光 斑 同 围 是 交 替 圆 环 所 组 成 的 绕 射 条 纹 。 心 光 斑 中 最 亮 , 做 爱 里 斑 。整 个 绕 射 叫 条纹 光 量 分 布 情 况 如 图 l所 示 , 不 多 总 光 量 的 8 % 落 在 差 4
线阵CCD尺寸测量的应用方法总结

(4)大尺寸测量:2b<L 当被测工件尺寸足够大,而采用拼接CCD不能实现测量时,可以采用两套CCD 测量系统实现大尺寸工件的边缘测量,然后将两套CCD测得的工件边缘位置与 两CCD相对位置综合起来,得出被测工件的尺寸。
CCD技术的应用中的一些问题:
1.测量系统的分辨率受CCD光敏元间距的限制为了提高测量系统的分 辨率,应尽可能准确的实现边缘特征的识别、提取和处理。现有的特征信号的 处理方法有电子细分法、插值函数法、Mart算子法、模糊成像法等。这些方法 各有利弊。如电子细分法的处理速度较快,但电路较为复杂;利用Mart算子 平滑原始的图像,可以去除噪声,但容易将原有的边缘平滑掉,采取何种方法 处理更合理、更高效,还需做进一步的探讨。 2.现有的CCD测量系统主要限于简单形状、简单尺寸的测量利用CCD 实现一些形状复杂的零件的尺寸测量,是值得进一步研究的问题。
பைடு நூலகம்
线阵CCD尺寸测量的应用方法总结:
采用CCD器件进行尺寸测量时随着被测尺寸大小的不同,所采用的检测方案也有 所不同。将被测尺寸大小按照CCD器件芯片感光面长度b进行分类: (1)微小尺寸测量:L≤1mm
当被测尺寸L≤1mm时,如果采用通过光照,直接读出反映被测尺寸大小的电荷信 号的测量方法,则会产生很大的测量误差。最好的测量方案是:用线阵CCD测量光 对微小尺寸工件的衍射条纹,再经过低通滤波、高速数据采集后送入计算机,通过 软件计算获得被测工件的尺寸。 (2)一般尺寸测量:1mm<L≤b 当被测工件尺寸lmm<L<b时,可以采用平行光成像法进行测量,该测量方案相对 比较简单,只需要通过计数器检测出被工件挡光部分CCD光敏区长度,即可测出 被测工件尺寸。 设CCD挡光部分所插入的计数器脉冲数为N,脉冲当量为s,则 L=Nscosθ式中,θ为平行光线与CCD光敏面法线之间的夹角。
航天遥感CCD相机检焦控制系统设计

航天遥感CCD相机检焦控制系统设计随着航天遥感技术的迅速发展,基于卫星平台的光学遥感相机对地观测成像是获取地面信息的主要途径之一,航天CCD相机作为一种重要的获取地面信息手段,能够获取直观、清晰的遥感图像信息,在航天遥感技术中起着举足轻重的作用[1,2]。
航天相机离焦是影响相机成像质量的重要因素。
航天相机在运载发射过程中会受到冲击、过载、振动、空气压力变化,相机在空间轨道运行中,受到太阳周期辐照而导致环境温度变化,这些因素都可能影响相机光学材料、机结构材料,而导致光机结构产生微变化和光学镜头组件曲率半径变形、反射镜镜面变形,从而导致相机焦距发生变化,成像平面偏离CCD焦平面位置产生离焦现象[3-5],影响相机系统MTF和成像质量。
为使在上述的环境条件下,保证相机的成像质量,实时获得最佳分辨率图像,就必须对离焦进行补偿。
本文针对某型航天遥感CCD相机的设计的调焦机构,为检测出调焦机构的运动精度,设计了一种基于单片机80C32E检焦系统,以检测出相机调焦机构实际运动精度。
此检焦系统具有简单实用、成本低、可靠性高、精确性和快速性好等特点。
二、检焦系统方案设计针对检焦系统功能需求和接口需求,在充分分析相机调焦机构的组成和机械结构配合,提出本文的检焦控制系统方案。
相机的检焦控制系统构成:相机上位计算机、与上位机通讯接口电路部分、检焦系统控制器80C32E、检测系统电源电路变换及控制器外围电路、步进电机控制驱动电路、步进电机、调焦传动机构及CCD焦平面部件、CCD焦平面位置编码器组成。
其中用于位置检测的位置编码器部分包括码盘及光电转换电路、粗码精码放大电路、整形、锁存、A/D转换。
三、检焦系统控制器电路设计在确保技术要求的前提下,尽量使结构紧凑,用件少、体积小、重量轻、可靠性高、控制器最小系统。
此检焦系统选用单片机80C32E 芯片为主控制器芯片,检焦电路控制器及其外围电路包括时钟电路、复位电路、工作模式控制开关等。
基于CCD的航空相机镜头焦距自动测量系统
的重 要 参数 之一 . 参 数 的 自动 精确 强 量 具 有 重 大 该 的意 义和实用 价 值 。传统 的测 量方 法 是借 助 于平 行
光 管 焦 面 上 的 刻 线 依 靠 人 眼 用 显 微 镜 读 数 进 行 测 量 。 这 种 方 法 效 率 低 . 时 费 力 , 测 量 时 人 为 因 素 费 且
ZH A O u [ n LIK a a Y 一i g. idu n a Qig a rnc Na a r n uia gn e igAc d my. n d o2 6 4 Chna n d o B a h. v l Ae o a tclEn ie rn a e Qig a 6 0 1, i )
( 军 航 空 工 程学 院 青 岛 分 院 . 东 青 岛 2 6 4 ) 海 山 60 1
摘
要 : 绍 了 一 种 以 线 阵 C D 固 态 传 感 器 取 代 读 数 显 微 镜 , 自动 测 量 和 实 时 显 示 结 果 的 航 空 相 机 镜 介 C 能
头 焦 距 测 量 系 统 . 述 了 系 统 的 工 作 原 理 、 件 和 硬 件 的 设 计 及 该 系 统 的洲 量 误 差 论 簌 关 键 词 电 荷 耦 舍 器 件 :镜 头 ; 距 ; 件 : 件 焦 硬 簌
维 空 间 的 光 强 分 布 信 号 转 换 为 时 间 序 列 的 电 信
号, 电信 号 经 电路 处 理 后 获 得 与 刻 线 问 距 相 对应 的
, . 得被 测 透镜 焦距 ,。 即
航 宅 相 机 镜 头 焦 距 测 量 的 方 法 中 , 大 率 法 放 足 目前 最 常 用 的 方 法 , 为 它 设 备 简 单 、 量 范 围 较 因 测
基于面阵CCD的相机自动调焦技术
基于面阵CCD的相机自动调焦技术李开端,赵育良,李英杰,张青臣(海军航空工程学院青岛分院,青岛266041)摘要:为满足摄影分辨力的要求,在航空相机拍摄过程中,镜头位置要随着摄影距离的改变相应调整。
线阵CCD交汇测量能准确测定点目标的距离,但对于面目标测量难度较大,若用面阵CCD替代线阵CCD,并利用小波变换获取的图像边缘特征,自动识别相同点目标在不同CCD面上的成像位置,可实现面目标距离精确测量和相机焦距的自动调整。
关键词:面阵CCD;交汇测量;小波变换;自动调焦中图分类号:TP39l;T M930.l2文献标识码:A文章编号:l000-9787(2002)06-0046-04Technolo gy of camera auto-focusin g based on area-arra y CCD LI Kai-duan,ZHAO Yu-Iian g,LI Yin g-ie,ZHANG Oin g-chen(0in g dao Brach,Naval Aeronautical En g ineerin g Institute,0in g dao266041,China)Abstract:Durin g aeriaI camera p hoto g ra p h,p hoto g ra p hic distance occur chan g e with fIi g ht p Iatform,ar g ue to satisf y resoIution,the Iocation of camera Iens wiII be ad usted corres p ondin g I y.The Iinear arra y CCD can accurate surve y the distance of tar g et,but measurin g area-tar g et is g reater difficuIt y.If re p Iacin g the Iinear arra y CCD with the area arra y CCD,and extractin g s p eciaIit y of ima g e ed g e usin g waveIet transform,auto reco g nition Ioca-tion of une g uaI tar g et’s ima g e in CCD surface,can reaIize the auto-focusin g and accurate measurement of surface tar g et.Ke y words:area-arra y CCD;intersection measurement;waveIet transform;focaI ad ustment0引言在所有的地面相机中,成像前都要进行手动和自动对焦,以获得最佳分辨力图案,而现有的国产航空相机则充分利用相机景深、不设对焦功能,这就限制了航空相机平台的飞行高度,另一方面,国外航空相机则采用了自准直原理补偿环境焦距误差和从飞行平台引入高度信号相结合方式完成相机对焦。
电子论文-利用线阵CCD自动测量航空相机镜头的焦距
第28卷第2期2002年3月 光学技术OPTICAL TECHN IQU E Vol.28No.2March 2002 文章编号:100221582(2002)022*******利用线阵CCD 自动测量航空相机镜头的焦距Ξ赵育良,李开端(海军航空工程学院青岛分院,山东青岛 266041)摘 要:提出了一种以线阵CCD 固态传感器取代读数显微镜的航空相机镜头焦距测量系统。
论述了系统的工作原理、软件和硬件的设计及系统的测量误差。
结果表明,利用线阵固态图像传感器取代读数显微镜,把特定物体经透镜成像的大小转换为电信号的脉宽,并利用计算机技术自动处理测量数据,从根本上克服了用读数显微镜进行测量的缺陷,实现了航空相机镜头焦距的实时精确地在线测量。
关键词:CCD ;镜头;焦距;硬件;软件中图分类号:TN386.5;TB851.1 文献标识码:AAuto 2measuring system of aerial camera lens applying linear CCDZH AO Y u 2liang ,LI Kai 2duan(Qingdao Branch of NAEA ,Qingdao 266041,China )Abstract :An auto 2measuring system of aerial camera lens is presented ,which substitutes linear array CCD sensor for read 2ing microscope to measure the focus of aerial camera lens.The principle ,the hardware ,the software and the measuring error of the system are described.The ex primental resuts indicate :by substituting linear array image sensor for reading miroscope ,changing the height of the photo of specific object through lens into the width of electronic pulse ,and progressing measuring da 2ta by computer automatically ,the disadvantages of microscope can be overcome and the accurate ,real 2time and on 2line measure 2ment of the focus of aerial camera lens can be realized.K ey w ords :CCD ;lens ;focus ;hardware ;software1 引 言航空相机镜头是由若干片透镜组成的,依靠透镜组获得清晰的影像。
测绘航空摄影考点解析
测绘航空摄影考点解析一、胶片航摄仪1.航摄仪的结构单镜头分幅摄影机是目前应用较多的航空摄影机,它装有低畸变透镜。
透镜中心与胶片面有固定而精确的距离,称为摄影机主距。
胶片幅面的大小通常是边长为230 mm的正方形:胶片暗盒能存放长达152M的胶片。
摄影机的快门每启动一次可拍摄一幅影像,故又称为框幅式摄影机。
单镜头框幅式胶片航空摄影机主要由镜筒、机身和暗盒三部分组成。
框幅式胶片航空摄影机分类:位于承片框四边中央的为齿状的机械框标;位于承片框四角的为光学框标。
新型的航空摄影机均兼有光学框标和机械框标。
框幅式航空摄影属于(中心)投影成像。
2.航摄仪的分类航空摄影机通常根据其主距或像场角的大小进行分类(1)根据摄影机主距F值的不同,航空航摄机可分为长焦距、中焦距和短焦距3种;(2)根据像场角的大小,航空摄影机可分为常角、宽角和特宽角3种。
表9-1-1航空摄影机的分类像场角(2ß)/(。
)主距(f)/mm常角≤75长焦距≥255宽角75~100中焦距102~255特宽角≥100短焦距≤102航空摄影对于航摄机主距的选择,顾及到像片上投影差的大小以及摄影基高比对高程测定精度的影响,一般情况下,对于大比例尺单像测图(如正射影像制作),应选用常角或窄角航摄机;对于立体测图,则应选用宽角或特宽角航摄机。
3、感光材料及其特性摄影过程中已曝光的感光片必须经过摄影处理(冲洗),才能将已曝光的感光片转变成一张负像底片。
航摄胶片的冲洗主要包括显影、定影、水洗、干燥等过程。
4、航摄仪的辅助设备1).为了尽可能消除空中蒙雾亮度的影响,提高航空景物的反差,需要加入航摄滤光片辅助设备2).为了补偿像移的影响,在测图航摄仪中需增加影像位移补偿装置。
3).为了测定景物的亮度,并根据安置的航摄胶片感光度,自动调整光圈或曝光时间。
需要加入航摄仪自动曝光系统4).常用的两种胶片航摄仪我国现行使用的框幅式胶片航空摄影仪主要有RC型航摄仪和RMK型航摄仪两种RC-10和RC-20的光学系统基本上是相同的,后者具有像移补偿装置新一代的RC-30航空摄影系统组成:RC-30航摄仪、陀螺稳定平台和飞行管理系统组戌,功能:像移补偿装置、自动曝光控制设备,GPS辅助导航的航空摄影。
CCD航空相机动态分辨率检测系统设计
CCD航空相机动态分辨率检测系统设计张欣婷;亢磊;姚清华;吴倩倩【摘要】设计了一套CCD航空相机动态分辨率检测系统,系统入瞳直径D=200 mm,焦距f'=2 000mm,视场角2ω=5°,利用光学设计软件Zemax进行仿真,设计结果表明,在奈奎斯特频率为40 lp/mm的情况下,调制传递函数曲线值均高于0.5.采用波差法校正由长焦距所引入的二级光谱,同时,引入分辨率尺的概念,将每一块单独的分辨率板采用拼接的方式制作成300 mm×24 mm的分辨率尺,令分辨率尺在电机的带动下作匀速直线运动来模拟动态目标.该测试系统的设计能够在模拟飞机飞行的状态下,对其动态分辨率进行检测,检测精度1″,可广泛用于测绘、军事侦察和航空航天等领域.【期刊名称】《应用光学》【年(卷),期】2018(039)005【总页数】4页(P683-686)【关键词】CCD航空相机;动态分辨率;分辨率尺;二级光谱;光学系统【作者】张欣婷;亢磊;姚清华;吴倩倩【作者单位】长春理工大学光电信息学院,吉林长春130012;中国中车长春轨道客车股份有限公司,吉林长春130062;长春工业大学,吉林长春130012;长春理工大学光电信息学院,吉林长春130012【正文语种】中文【中图分类】TN202;O439引言当前,随着航空相机在军事及民用领域的用途越来越广泛,其主要性能指标分辨率被更深入地研究,它是判断航空相机成像质量的重要指标。
若要准确检测CCD航空相机的分辨率是否达到要求,传统的方法是将CCD相机安装到飞机上,依据飞机的航高和航速进行实拍,再对CCD所获图像进行分析和处理,但这样势必会耗费巨大的成本,造成不必要的浪费[1-2]。
由于航空相机涉及到军事领域,所以国外相关机构对该领域的技术和资料采取保密措施,公开的部分较少;而国内在航空相机性能测试方面长春理工大学和哈尔滨工业大学在做这方面工作[3-4],且两者均采用胶片式检测系统。
基于CCD的航空相机自动检焦系统
基于CCD的航空相机自动检焦系统赵梅;马中洲;唐海燕;沙宇芳;张勇【期刊名称】《光电工程》【年(卷),期】2008(35)11【摘要】要使航空相机获得高质量的图像,必须保证镜头的焦距和实际成像面的位置符合技术要求.提出了一种自动检测航空相机焦距和是否离焦(实际成像面的位置是否在焦深范围内)的系统,论述了系统的工作原理、硬件组成和软件设计.该系统采用平行光管产生检焦信息,利用CCD摄像头作光电转换器件接收图像,采用重心法处理数据,由光电线位移传感器和光栅数显表共同作用实现摄像头轴向的精确平移,从而能够确定相机的最佳成像位置和图像尺寸.最佳图像位置用来判断是否离焦,最佳图像尺寸用来计算焦距.使用该系统对航空相机镜头焦距的检测准确率达到99.87%、是否离焦的判断与试飞结果完全相同.【总页数】5页(P77-81)【作者】赵梅;马中洲;唐海燕;沙宇芳;张勇【作者单位】空军航空大学,特种专业系,长春,130022;空军航空大学,特种专业系,长春,130022;空军航空大学,航空理论系,长春,130022;空军航空大学,特种专业系,长春,130022;空军航空大学,特种专业系,长春,130022【正文语种】中文【中图分类】TN286.5;TB811+.13【相关文献】1.基于线阵CCD的航空相机镜头焦面的自动定位系统 [J], 赵育良;李开端;张青臣2.基于线阵 CCD传感器的道路划线自动检测系统 [J], 郝琳3.基于CCD摄像头的航空相机最佳成像位置定位系统 [J], 赵梅;沙宇芳;王芳荣4.基于CCD的航空相机平板玻璃厚度测量系统 [J], 赵育良;王伟5.基于CCD的航空相机镜头焦距自动测量系统 [J], 赵育良;李开端因版权原因,仅展示原文概要,查看原文内容请购买。
用线阵CCD测量透镜焦距
用线阵CCD测量透镜焦距
曹国荣
【期刊名称】《物理实验》
【年(卷),期】2000(020)001
【摘要】根据透镜成像原理,利用CCD和单片微型计算机测量像的大小.再由单片微机计算待测透镜的焦距.由于该方法采用光电技术,测量透镜焦距的精度较高.【总页数】3页(P13-15)
【作者】曹国荣
【作者单位】镇江师范专科学校物理系,212003
【正文语种】中文
【中图分类】O4
【相关文献】
1.线阵CCD回弹仪指针位移测量系统的设计与测量精度分析 [J], 付辉;丁苏红;王会生;胡鹏浩
2.提高卫星三线阵CCD影像空中三角测量精度及摄影测量覆盖效能 [J], 王任享;王新义;李晶;王建荣
3.用线阵CCD测量透镜焦距 [J], 曹国荣
4.薄透镜焦距测量中的测量条件选择 [J], 李山东;侯庆春;李景平
5.基于提高线阵CCD测量系统测量精度的研究 [J], 江育民;黄惟公;杨益
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第28卷第2期2002年3月 光学技术OPTICAL TECHN IQU EVol.28No.2March2002 文章编号:100221582(2002)022*******利用线阵CCD自动测量航空相机镜头的焦距Ξ赵育良,李开端(海军航空工程学院青岛分院,山东青岛 266041)摘 要:提出了一种以线阵CCD固态传感器取代读数显微镜的航空相机镜头焦距测量系统。
论述了系统的工作原理、软件和硬件的设计及系统的测量误差。
结果表明,利用线阵固态图像传感器取代读数显微镜,把特定物体经透镜成像的大小转换为电信号的脉宽,并利用计算机技术自动处理测量数据,从根本上克服了用读数显微镜进行测量的缺陷,实现了航空相机镜头焦距的实时精确地在线测量。
关键词:CCD;镜头;焦距;硬件;软件中图分类号:TN386.5;TB851.1 文献标识码:AAuto2measuring system of aerial camera lens applying linear CCDZH AO Y u2liang,LI Kai2duan(Qingdao Branch of NAEA,Qingdao 266041,China)Abstract:An auto2measuring system of aerial camera lens is presented,which substitutes linear array CCD sensor for read2 ing microscope to measure the focus of aerial camera lens.The principle,the hardware,the software and the measuring error of the system are described.The exprimental resuts indicate:by substituting linear array image sensor for reading miroscope, changing the height of the photo of specific object through lens into the width of electronic pulse,and progressing measuring da2 ta by computer automatically,the disadvantages of microscope can be overcome and the accurate,real2time and on2line measure2 ment of the focus of aerial camera lens can be realized.K ey w ords:CCD;lens;focus;hardware;software1 引 言航空相机镜头是由若干片透镜组成的,依靠透镜组获得清晰的影像。
而透镜组的后主点到后主焦点的距离即为镜头的焦距,它是航空相机技术性能的重要参数之一。
该参数的自动精确测量具有重大的意义和实用价值。
传统的测量方法是借助于平行光管焦面上的刻线,依靠人眼用显微镜读数进行测量。
这种方法效率低,费时费力,且测量时人为因素影响较大,测量结构不稳定。
本文介绍了利用线阵固态图像传感器取代读数显微镜,把特定物体经透镜成像的大小转换为电信号的脉宽,并利用计算机技术自动处理测量数据,从根本上克服了用读数显微镜进行测量的缺陷,实现了航空相机镜头焦距的实时精确在线测量,不仅测量速度快,而且测量精度高。
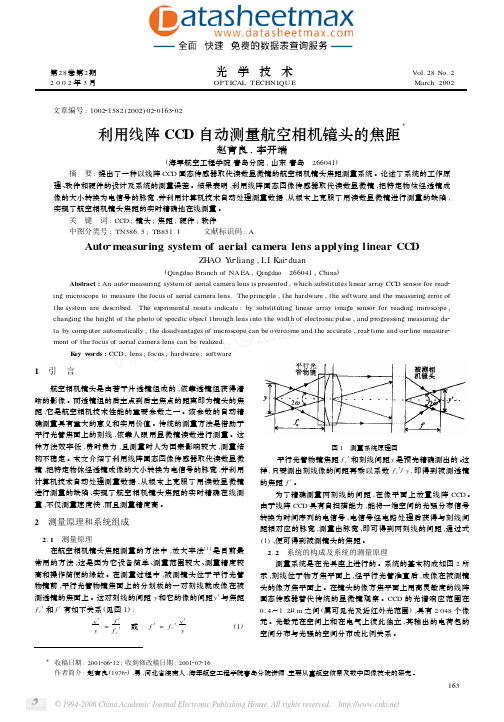
2 测量原理和系统组成2.1 测量原理在航空相机镜头焦距测量的方法中,放大率法[1]是目前最常用的方法,这是因为它设备简单、测量范围较大、测量精度较高和操作简便的缘故。
在测量过程中,被测镜头位于平行光管物镜前,平行光管物镜焦面上的分划板的一对刻线就成像在被测透镜的焦面上。
这对刻线的间距y和它的像的间距y′与焦距f c′和f′有如下关系(见图1):y′y =f′f c′ 或 f′=f c′y′y(1)图1 测量系统原理图 平行光管物镜焦距f c′和刻线间距y是预先精确测出的。
这样,只要测出刻线像的间距再乘以系数f c′/y,即得到被测透镜的焦距f′。
为了精确测量两刻线的间距,在像平面上放置线阵CCD。
由于线阵CCD具有自扫描能力,能将一维空间的光强分布信号转换为时间序列的电信号,电信号经电路处理后获得与刻线间距相对应的脉宽,测量出脉宽,即可得到两刻线的间距,通过式(1),便可得到被测镜头的焦距。
2.2 系统的构成及系统的测量原理测量系统是在光具座上进行的。
系统的基本构成如图2所示,刻线位于物方焦平面上,经平行光管准直后,成像在被测镜头的像方焦平面上。
在镜头的像方焦平面上用高灵敏度的线阵固态传感器替代传统的显微镜观察。
CCD的光谱响应范围在0.4~1.2μm之间(属可见光及近红外光范围),具有2048个像元。
光敏元在空间上和在电气上彼此独立,其输出的电荷包的空间分布与光强的空间分布成比例关系。
361Ξ收稿日期:2001206212;收到修改稿日期:2001207216作者简介:赵育良(19762),男,河北省滦南人,海军航空工程学院青岛分院讲师,主要从事航空侦察及数字图像技术的研究。
图2 系统的基本构成图3 信号处理流程图 刻线的像经CCD 转换为视频信号后,一路经图像采集卡被直接送入视频监视器,供光路调整和调焦用;另一路则通过放大电路、门限比较器、计数器后,送入计算机自动处理并输出结果。
CCD 是在时钟脉冲控制下利用移位寄存器的功能实现电荷包的读取与输出,形成一系列幅值不等的时钟脉冲序列。
若CCD 驱动时钟频率为v ,输出钟频为2v ,CCD 单元尺寸为s ,则从CCD 出来的信号如图3(a )所示,经放大滤波后如图3(b )所示,再经比较器进行二值化处理,得到矩形信号如图3(c )所示,其电平与TTL 电平兼容。
如果计数器的计数时钟频率为u ,以图3(c )中的低电平部分控制计数器计数,计数值为k ,则会得到如下关系:y ′=1u・k12v・s (2) 以上就是所得像两刻线的间距,再利用式(1)可算出待测镜头的焦距。
所测数据通过计算机自动处理,可在监视器或打印机上将结果输出。
3 系统的硬件和软件的实现测量原理的实现方法主要靠CCD 驱动电路。
其驱动电路由晶体振荡器和频率发生电路分频两个部分组成,用来产生CCD 过程所需要的驱动时钟频率和+12V 电平,即驱动电路过程硬件设计。
设计采用可编程的8253芯片,利用它的分频脉冲图4 硬件示意图功能来产生SHIFT 信号,用图3(c )控制8253芯片的计数器,工作在零方式。
在这种方式下,计数器对CL K 输入信号进行减法计数,每个时钟周期计数器减1。
设定该方式后,计数器的输出OU T 变低。
当图5 软件流程框图计数减为零时即计数结束时,输出的OU T 变高,该输出信号即作为中断请求信号来使用。
此计数过程受到计数器的门控信号G A TE 所控制。
当G A TE 为高电平时,允许计数;若门控信号为低电平则禁止计数。
使用计数器可以测定刻线像间距y ’。
系统硬件实现的基本构成如图4所示。
采用8253进行接口控制时,整个系统便能方便的实现移频,即移频过程软件的设计。
其微机控制程序框图如图5所示。
4 系统测试精度分析在该系统中,航空相机镜头焦距f ′是通过测量y ′,并利用公式(1)计算得到的。
由间接测量误差的传递关系理论可知,可由下式计算焦距的相对标准偏差:δf ′f ′=1f c ′2δ2f c ′+1y ′2δ2y ′+1y2δ2y(3)式中,δ2f ′c,δ2y ′,δ2y 分别为f c ′,y ′,y 的标准偏差。
测量系统用国产常用的f ′c =1200mm 的平行光管,刻线间隔分为10mm ,CCD 像元尺寸为0.007mm ,代入误差公式得到误差大约为0.10%。
根据文献[1],用传统的显微镜读数法得到的误差大约为0.24%。
因此采用线阵CCD 代替显微镜读数,精度有了一定程度的提高,并实现了自动化测量。
但就精度而言,0.10%的误差仍不能令人满意。
从上面误差公式可知,系统的误差的改善主要取决于CCD 的像元尺寸,随着CCD 技术的不断发展,像元尺寸也会不断改善,系统误差也将会有大幅度减小。
5 结 论经实验测试,本系统能够完成航空相机镜头焦距的自动测量,并能达到一定的精度,具有一定的实用价值和发展前景。
另外,系统的测量过程是在光具座上完成的,在测量过程中为了达到预期精度,应注意以下几点:(1)平行光管、被测航空相机镜头和CCD 测量系统三者的光轴要基本重合。
(2)通过被测镜头的光束尽可能的充满被测镜头的有效孔径;CCD 测量系统也要尽可能不切割被测镜头的成像光束。
(3)平行光管的焦距最好为被测镜头焦距的2~5倍。
(4)为了减小误差,需多次测量取平均结果。
参考文献:[1]苏大图.光学测量[M ].北京:机械工业出版社,1997.[2]黄宜军,施德恒.应用CCD 的透镜曲率自动测量系统[J ].光学技术,1998,3(2):28—30.[3]侯国章.测试与传感技术[M ].哈尔滨:哈尔滨工业大学出版社,1998.[4]孙涵芳.IN TEL 16位单片机[M ].北京:北京航空航天大学出版社,1995.[5]王庆有,孙学株.CCD 应用技术[M ].天津:天津大学出版社,1993. 科技论文摘要的写法:摘要一般应说明研究工作目的、实验方法、结果和最终结论等,而重点是结果和结论。
摘要的撰写要求用字准确,阐述简明;切忌空洞议论,模棱两可,或对研究工作本身优劣进行自我评述;摘要部分的结构要紧凑,避免使用图表、化学结构式、非公知公用的符号和术语等;摘要部分要一气哈成;中文摘要文长以200~300个字为宜,如遇特殊需要字数可以略多。
461光 学 技 术 第28卷。