多分辨率地形模型生成算法研究
地形模型实时多分辨率显示算法的研究
维普资讯
..—
—
2 4. 7 . — —
西北 大学学报(自然科学版 )
8
第3 7卷
中选 择合适 的顶点集 来 完 成 的 j节 点 评 价 测 度 应 。
以知 道 , 种测 试方 法共 测试 了 4 个 网格 。 这 1
综 上所 述 , 用 四叉树 层 次结构 , 过减 少地 形 采 通 节 点 与视 图体 的裁剪 测试 次数 可 以大 大 提高裁 剪算
法 的效 率 。
收稿 日期 :0 60 -8 20 - 0 9
2 节点 评 价 测 度
在 地 形 的三 维 可 视化 中 , 形模 型 的数 据量 很 地
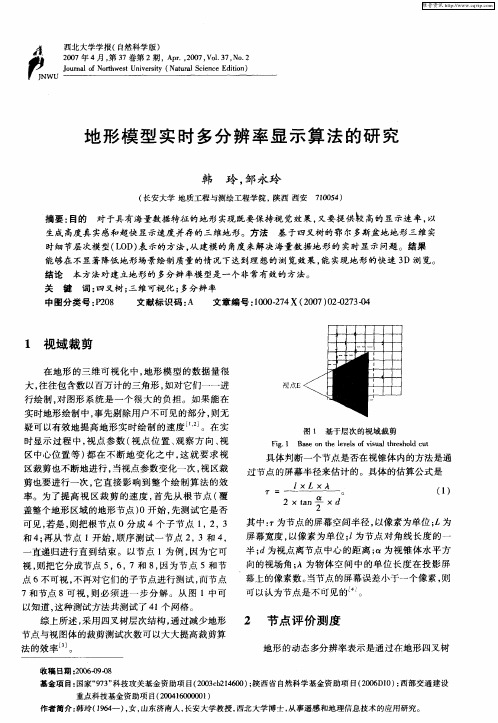
大, 往往 包含数 以百万 计的 三角形 , 对 它们一 一进 如 行绘 制 , 图形 系 统 是 一 个很 大 的负 担 。如 果 能 在 对 实时地 形绘 制 中 , 先剔 除用 户不 可见 的部 分 , 无 事 则 疑可 以有效 地提 高 地 形实 时 绘 制 的速 度 ¨2。在 实 , 时 显示 过程 中 , 点 参 数 ( 点 位 置 、 察 方 向 、 视 视 观 视 区中心位 置 等 ) 在 不 断 地 变 化 之 中 , 就 要 求 视 都 这 区裁 剪 也不断 地进 行 , 当视点 参数 变化 一 次 , 区裁 视 剪也 要进 行一 次 , 它直 接 影 响 到 整个 绘 制算 法 的 效 率 。 为 了提 高 视 区 裁 剪 的速 度 , 先 从 根 节 点 ( 首 覆 盖 整个 地形 区域 的地形 节点 ) 始 , 测试 它是 否 0开 先 可见 , 若是 , 把根 节点 0分 成 4个 子 节 点 1 2, 则 , 3 和 4 再 从 节 点 l开始 , 序测 试 一 节 点 2 3和 4 ; 顺 , ,
大规模三维地形仿真算法的研究
基 于视 点相 关 以 地形本身起 伏程度相 关的节点评价 系统动 态地更 新地 形 网格 , 归地分 割每一 个节点 , 及 递 直到 达 到 需要 的细节程度. 地形 的起伏程度 事先被 计算 出来以提 高速 度. 不 同的 细节等 级上作 区分 主要 是 为 了增加 地 在 形的真 实感. 在编程 时所使 用的工具为 O eGL, p n 主要是 运用其强大的 图形库 去验证 了细 节等级在 大地行 中运 用的
离物体较远的视点 , 在屏幕上 占据很少的像素点 , 从 而减轻硬件绘制的压力. 另外 , 将处于焦点位置 的某 个物体局部表面 , 分辨率更高 , 其显示的精细程度要 比其他部分更高 , 即不 同位置的局部其分辨率是 不
同 的. 因此 , 对模 型成 像 时 , 采 用 多 种 不 同 的精 在 将
形表 示 为一 连 串 的具 有 不 同程度 的三 维 模 型 , 用 采
较高的分辨率显示离物体较近的视点 , 在屏幕上 占
据较 多 的像 素点 , 之 只 能采 用较 低 的分 辨 率 显 示 反
1 大规模 三维多分辨率地形视景 的算 法
目 , 前 地形简化算法基本分为两种 : 一是基于四
维地 形 模 型根 据观察 点 的远近 和模 型 的 复杂度 来选 取不 同 的模 型 .
的起伏程度事先被计算 出来 以提高速度. 以前 对 复 杂 地 形模 型 的简化 是 数 字 的 , 合 复 适
杂 地形 模 型 的预 先 处 理 , 不 同 L 在 OD层 问 切 换 进
行地形绘制时有明显的不连续感 , 不适于实时交互. 发展 到后来 , 出现了视相关的简化模型 , 它将复杂地
度表示三维物体 , 并选择不同精度的模型 , 才能更好 地 实现 三维 复 杂模 型 的实时显 示 .
城市复杂地形的多分辨率数据表示

(, 尸)和 (2 如 果 P c尸 , 尸). 2 则称 表示 比表 示 具有 较高 的分辨 率 . 当同一 块地形 会被 两种 方法分 割
表示和处理 , 那么被分割的各面片相互间相邻接的关系及每块数据 的数据表示都会变得得复杂 . 本算法中 采用 了四叉 树模 型来 描述和 管理地 形表 示数据 .
gnrt ave dp n etd nmi mutrslt nm d 1 h sa ho i sbet a o s eal v l r eea i ee dn y a c l- oui o e .T er er nt s ujc hs ni rbe a ef e w ie o e c h c d u o
K N h -1 u O G C ui i
(co lfC m ue S i c a d n ier g, in ntue f4c ic r a dC v E gn ei C ag cn,C i 10 2 ) Sh o o o p t ce e n E gn ei Jl Isi to , ht t e n ii n ier g, h n h u r n n i t r eu l n hn 3 0 1 a
多分辨率方法 , 浏览远近 同一景物 , 景物模型的分辨率也呈高低变化 . 动态多分辨率地形模型的主要工作 核心为 : 创建有效的多分辨率地形管理结构 ; 设计实时的与视点相关的地形简化算法 ; 构造合理 ① ② ⑨ 的评 价 函数 .
一种多分辨率动态地形算法
能力, G o p p算 法基 础 上提 出 了一 种 多分 辨 率 动 态地 形 算 法。该 算 法能 较好 地 生成连 续 在 eMiMa L OD地 形 模型 , 支持 高度场 和 亮度 的实 时变化 。 通 过 实验 证 明 了算 法 的可行 性和 有 效 性 , 已在 系
统 中应用 。
关 键词 :计 算机应 用 ;多 分 辨率 ;动 态地 形 ;层次 细 节 ; e MiMa Go p p
中图分 类号 : 3 1 9 TP 9 .
文献 标 志码 : A
文章编 号 :1 0 —0 3 2 0 )91 5 —5 0 01 9 ( 0 7 0 —0 30
An Al o ihm o u t- e o u i n Dy a i r a n g rt f r M lir s l to n m c Te r i
●
( . 放 军 理 工 大 学 工 程 兵 工 程学 院 ,江 苏 南 京 2 0 0 ;2 中 国 卫 星 海 上 测控 部 ,江 苏 江 阴 2 4 3 ) 1解 10 7 . 1 4 1
摘要 :在 多用工 程 车训练 模拟 系 统研 究 中, 态 地 形 的 实 时可视 化 是 重 点也 是 难 点。研 究 了 动 现 有层 次细 节( OD) 形 生成 算 法特 点。根 据 动 态地 形 要 求, 了适 应 现有 系统 图形 硬 件 的处 理 L 地 为
vhc riigs l i ytm . h h rce f xsigl e o ea ( O e ieta n i a o sse T ecaatr i n vl fdti L D)tra l r h l n mu t n oe t e l eri a oi ms n g t
高精度地形测绘技术的研究及应用

高精度地形测绘技术的研究及应用一、引言地形是指地球表面地形的形态、构造及其空间分布特征。
高精度地形测绘技术是一种使用现代测绘仪器和技术,对地表进行高分辨率、高精度的测量,获得地形数据并生成数字高程模型的科学技术。
现代地形测绘技术已经成为管理国家、支持社会经济发展和科技创新的重要基础设施,具有重要的实用价值和科学研究价值。
二、地形测绘技术的研究现状地形测绘技术在科学研究、资源探测、基础设施建设、环保监察等领域中有重要的应用价值。
高精度地形测绘技术的研究主要是依靠计算机软、硬件设备、测量仪器等技术手段进行的。
目前常用的地形测绘技术包括照相测绘、激光测绘、BGS测绘等多种测量方法,而以激光测绘技术在地形测量中更为广泛使用。
三、激光测绘技术的原理及应用激光测绘技术是使用激光器发射出的激光束对地面进行扫描,通过接收设备收集反射或散射的激光束,再运用三角测量原理、空间坐标和空间变换等数学方法,获取地形点云数据,并生成高精度的数字高程模型。
激光测绘技术的主要应用在地形测量、大型工程建设、城市规划、农业遥感、水资源管理、生态环境保护及地震等诸多领域。
激光测绘技术具有快速、高效、高精度的测量优势,同时还能解决地形测绘中数据获取和处理的难题。
近年来,应用激光测绘技术对山区地形测绘进行了研究,结果表明激光测绘技术能够很好地解决山区地形的测绘问题,对于山区土地利用、地质灾害、水文水资源管理及环境保护等都有着重要的作用。
四、数字高程模型的生成方法及应用数字高程模型是从地面高程数据中生成的数字地形模型,具备精度高、精度符合要求、三维效果清晰等特点,可以应用于城市规划、地形分析、环境监测以及资源规划等领域。
生成数字高程模型主要有插值、倾斜平面、逆距离法以及TIN 等方法。
插值法是适用于点数据的一种方法,倾斜平面是通过延伸一条线上的两个端点,基于高程值缓慢变化的推断方法,适用于缺乏上下游点的河川测量。
逆距离法是通过离位置测量点近远的程度来进行赋值,适用于点密度较大的现实情况。
数字地形模型的生成方法与应用

数字地形模型的生成方法与应用数字地形模型(Digital Terrain Model, DTM)是一种通过数字技术生成地形模型的方法,可以用于各种应用,如地形分析、工程设计、环境评估等。
本文将介绍数字地形模型的生成方法以及其在实际应用中的价值和挑战。
一、数字地形模型的生成方法1. 遥感技术遥感技术是一种通过卫星、航测等手段获取地表信息的方法。
利用遥感技术,可以获取地表的高程数据,从而生成数字地形模型。
常用的遥感技术包括激光雷达、雷达干涉测量、测量影像匹配等。
2. 全站仪技术全站仪技术是一种测量地形高程的方法,它利用全站仪仪器和测量棒测量地面点的三维空间坐标,进而计算出地形的高程。
全站仪技术可以实现对地形的高精度测量,尤其适用于小范围地貌测量。
3. 自动化测量技术自动化测量技术是一种通过自动化仪器和算法实现地形高程测量的方法。
自动化测量技术包括GPS、INS(惯性导航系统)等。
这些技术可以实现大范围地貌的高效测量,但相对于全站仪技术,其测量精度有所降低。
4. 数学建模技术数学建模技术是一种通过建立地形高程的数学模型,利用现有的地形数据进行拟合和插值计算,从而生成数字地形模型的方法。
数学建模技术可以通过插值方法、回归分析等统计算法,构建地形高程的数学模型,并生成数字地形模型。
二、数字地形模型的应用价值数字地形模型在地质、环境、工程等领域具有广泛的应用价值:1. 地质学研究数字地形模型可以提供地质学研究的基础数据,如地表高程、坡度、坡向等信息。
研究人员可以通过分析数字地形模型,了解地表地貌特征,进而研究地壳运动、地貌演化等问题。
2. 地形分析与规划数字地形模型可以为城市规划、交通设计等提供依据。
通过分析数字地形模型,可以评估地形对于城市规划和交通规划的影响,优化规划方案,提高城市和交通的安全性和效率。
3. 工程设计与施工在工程设计和施工中,数字地形模型可以提供工程设计和施工的依据数据。
通过分析数字地形模型,可以评估地形对工程的影响,如土地平整度、坡度等,从而制定合理的工程设计方案和施工方案。
大规模地形模型的多分辨率显示技术研究
行 的 是 采 用 L D( v l o e i 技 术 。 尤 其 在 微 软 的 渐 进 格 网 ( r ge s e M s ) 术 出现 后 , 类 问 题 的 研 究 成 为 了 O 1 es f d t l e a ) P o rs i e h 技 v 此
关键词 L 0D 渐 进 格 网 RT N I 格 网 简 化
文 章 编 号 10 — 3 1 (0 2 1— 2 4 0 0 2 8 3 一 2 o )5 0 4 — 3
文献标 识码 A
中图分 类号 T 3 9 P 1
M u tr s l to s a i a i n Te hn l g f La g - c l r a n li e o u i n Viu l to c o o y o r e S a e Te r i s z
t c n l g o Mi r s f B t h r a s a e e h oo y f c o ot u t e e lo r ma y r b e wh n e p e p l t i e h o o t t e e p s n t n f . n p o l ms e p o l a p y h s t c n l g y o h r r e t i o e a o lr e c a e e a n . o h s a e x e d t i e h oo y n p o s s b o k- a e mu r s l to me h d n t i a g -s l t r i sS t i p p r e t n s h s t c n l g a d r p e a l c b s d o hi o u i n e t o a d h s wo k i e f r d u d r t e a s i e a i h o y r s a c u d o r s p r me n e h u p c s o b c t e r e e r h f n f COS ND. o f s TI
测绘技术如何进行DEM生成与分析
测绘技术如何进行DEM生成与分析测绘技术在地理信息系统(GIS)和遥感领域中起着重要的作用。
其中,数字高程模型(Digital Elevation Model,简称DEM)的生成和分析是测绘技术应用的重要方面之一。
本文将介绍DEM的生成和分析的基本原理和方法。
一、DEM生成DEM是地球表面高程信息的数字化表示,可以呈现出地面的起伏和形状。
常见的DEM生成方法有光学影像法、激光雷达法和雷达干涉法等。
1. 光学影像法光学影像法是利用航空或卫星遥感影像来生成DEM的一种方法。
通过对图像进行几何矫正和配准,可以获取地面上的特征点的坐标,并计算出其高程信息。
这种方法常用于大面积的地形测量和地貌分析。
2. 激光雷达法激光雷达法是利用激光器向地面发射激光束,通过测量激光束的反射时间和回波强度来计算地面点的坐标和高程信息。
这种方法具有高精度和高分辨率的优势,常用于山地地形的测量和建模。
3. 雷达干涉法雷达干涉法是利用合成孔径雷达(SAR)的干涉图像来生成DEM的一种方法。
通过对两幅或多幅干涉图像进行差分操作,可以获取地表的高程变化信息。
这种方法适用于大范围的地表变形监测和地震研究。
二、DEM分析DEM生成后,可以进行各种地形参数的分析和应用。
下面介绍几种常见的DEM分析方法。
1. 地形剖面分析地形剖面分析是对DEM数据进行剖面提取,以了解地面的起伏变化情况。
通过剖面分析,可以获取地面的高程变化曲线,并进一步计算地形参数,如坡度、坡向、高程差等。
这些参数对地质研究、水文模拟和土地规划等领域具有重要意义。
2. 流域提取和水流模拟利用DEM数据可以提取出流域范围,并计算出流域的面积、长度和周长等属性。
同时,基于DEM数据,还可以进行水流模拟和洪水预测。
通过建立流域模型,模拟水流在地表的流动过程,从而预测洪水灾害的发生和影响。
3. 三维可视化和地形重建利用DEM数据可以进行三维地形模型的可视化和地形重建。
通过DEM数据,可以构建真实的地形模型,使人们能够直观地了解地貌特征和地形变化。
大规模多分辨率地形实时绘制算法研究

Ke od : it l ao oe( E ) w vltm l・ slt n t a o e yw r s d i e vt nm dlD M ; ae ; utr ou o ; r i m dl ga e i l e ie i e n
为 了实现交互实时绘 制大规模 地形 , 在一般 采用数 字高 现 程模型 ( E 来对 地形 进行 表示 , D M) 以反 映真 实地 形 。然 而 , 由 于海量数据这一大规模地 形 的显 著特点 , 即便 是 图形 工作 站也 不能满足实 时绘 制 的要求 … 。因此 , 直接 使 用原 始 D M数 据 E 进行可视化是不现实 的。为了能在 不影 响显 示质 量的同时连续 地生成地形模型 , 现在普遍采用多分辨率模型来解决这个 问题 。 多分辨 率地形模 型的思想 贯穿着细节层 次技术 ( O lvl L D, e e o e i 思想。例如 , 敏等人 采 用简 单 的隔行 抽稀法 简化 f tl da) 孙 不 同 L D层次 的 D M, O E 按视点距离对规则 网格进行 D M分层。 E 虽然该 方法 在一定 程度上满足了大规模地形数据实 时显示 的要 求, 但地形绘 制 的精 度较低 , 而且不能 由低分辨 率 的 D M逆 变 E 换 到高分辨率的 D M。谭兵等 人 给 出了一 种 与视点 相依赖 E 的对地 形节点误差进行评价 的方法 , 用基 于约束 四叉树构 建 采
关键词 : 数字 高程模型 ( E ; D M) 小波分析 ; 多分辨率; 地形模型
中图分 类号 :P 9 . T 3 19 文献标识码 : A 文章编号 :0 0— 89 2 0 )2— 0 2— 4 10 8 2 (0 8 0 03 0
Re e r h o a - m e Re de i o a sv u t- s l to r a n s a c n Re lTi n r ng f r M s i e M liRe o u i n Te r i WAN e,Z AI h n - n I N n — e G P i H e gj ,JA G Ho gm i Z u
基于DirectX的多分辨率动态DEM构网算法研究

细节层次 的模型 以达到提高显示 效率的 目的【 4 1 。 第一种方法无需实时的计算 , 因此它可以节省资
[ 收稿 日期】 2 0 — 2 2 0 80 — 3 [ 作者简介】  ̄NN(9 1)女 , 1 8一 , 河南郑州人, 在读博士生, 主要研究方向为军事地理信息系统。
维普资讯
感 知 的特 点 来 简 化 模 型 ,是 模 型 简 化 的一 种 利
器。当物体离我们很远 时, 我们看到的物体就会 变得非常小 , 表现在屏幕上 时 , 这个物体只 占据
几个甚 至 一个像 素 。 时如 果我 们 用很多 的三 角 这 形来 表示 它 , 只是 浪费 时间 和资 源 。相反 , 如果 当
一
如何方便 、 高效 、 实时地简化地形数据 , 就成为地 形三维显示程序的一个首要解决的问题。解决这
一
大 瓶颈 。 立实 时交 互 的虚 拟地形 成为 目前 国 建 目前 地 形 模 型 主 要 分 为 规 则 格 网 模 型
问题 的一个 比较好 的办法就 是 L D算法 。 O L D是层 次细 节 (eeo ea) 称 , 是 O Lvlf tl D i的简 它
R G模 型 中顶 点 分 布 的规 则 性 , S 使得 这 种模 型 比
TN模 型具 有更 大 的应 用价 值 ( I 如在 地 形分 析 中
一
般都选用 R G模型) S ,但也同时带来 了较大的
数据冗余[ ” 。本文主要探讨基于地形 R G模型的 S 多分 辨率 动态 构 网算法 。
上 的渲染 速 度 , 次渲 染 的 三角 形 数 目一般 不 能 每 大 于 30 00个 , 般在 20 右 才能 保 持较 好 的 一 00左
基于局部熵的实时连续多分辨率地形绘制

()存 放地 形 高度 数 据 的数 据 结 构 . 两 种 1 有 获取 高度 数据 的途 径 : 过 数 字 高程 模 型 ( ii l 通 Dgt a Eeai dl D M ) l t nMo e, E 的获 取 方 法 、 过地 形 高 v o 通 度 图 的获 取 方法 .
局部 熵作 为 四叉 树 多 分 辨率 的判 断 依 据 , 忽 视 但 了多 分辨 率 的连续 变化 . 本文 引入 局部 熵 因子作 为粗 糙度 新 的衡量 因
数据标 准 等 . 类 D M 数据 定 义 的 信息 较 多 , 这 E 三 维地 形实 时绘 制 只要考 虑 网格采 样点 的间距信 息 和其对 应 的高 度数 据 即可 . 地 形 高度 图 中 , 每个 像 素点 的灰 度 信 息 代 表
D M 数据 并没 有统 一 的格式 标 准 , 用 的数 E 常 据标 准有 美 国地 理 DE 数 据 标 准 和 日本 D M M E
文献 [] 连续 多分 辨 率 绘 制 算 法使 用拆 分 2的 尺度 作 为地形 节 点 选 择 分 辨 率层 次 的标 准 , 分 拆 尺度 考 虑距 离 因子和粗 糙 度 因子 , 中 , 糙 度 因 其 粗 子用 节 点 的高度差 来 近似模 拟 . 文献 [] 虑 采用 6考
本文实验根据中巴地球资源卫星的遥感影像提取相关地形的高度图将高度图的灰度值映射到指定地形区域的高度值区间中最后把这些高度值存储在动态分配的数组中以供实时绘制时调用
一种视相关多分辨率模型及其在地形绘制中的应用
D MG i * S n 4 ; ∥4 E r d p o[ ] 个子节点指针
DEMGr p ae t ∥ 父 节 点 指 针 i d P rn ;
DEM G r p f , p g t -p to , i d Let Ri h ,R Bo t m -
域 , 中, 其 根节点覆 盖整 个地形 区域 , 1 地 形的 涉及
中圈分类 号:215 P3.
地 形 可 视 化 领 域 中 . 形 多 分 辨 率 模 型 的 构 地 建 在 地 形 实 时 绘 制 中具 有 非 常 重 要 的 作 用 目前
误 差 较 大 。基 于 地 形 四 叉 树 的 地 形 绘 制 的 基 本 思
想就是在绘制 效率和地形表示误差之 间寻求一 个
维普资讯
第 1 j卷第 1崩
20 0 2年 3 月
测 绘 学 院 学 报
J ura fI sh t t r e ig a dM a pn o n  ̄。 n t u eo v yn n p ig Su
V
1 o l 9N
M a 2O O2
型 和基 于树 数 据 结 构 的 多 分 辨 率 层 次 模 。
型一 。但 总 的 说 来 , 基 于 三 角 网 剖 分 的 多 分 用
辨 率层 次模 型来进行地形场 景实时绘制 的算法并 2 地 形 多 分 辨 率 模 型
不 多 , 前该 领 域 研 究 最 多 的还 是 基 于 树 数 据 结 目
fDE p M
mM a Ro 和 n a C 1 别 表 示 地 形 在 纬 度 和 x w M xo分
模型实时绘制算 法 , 在该 算法 中引入 了视 相关 的 概念 , 实现了基于四叉树 的地形 结点的快 速查询 .
多分辨率下的LOD地形简化技术研究
种基 于距 离闭值 和 分割标 志的 双 向裂缝 消 除 方法 , 通过 对 距 离闭值 和 节 点 分割 标 志进 行判 定 , 经 距 离阈值 限制 后 , 分别从 缩减和 剖分 两个相 反 的 方向 对产 生 裂缝 的相 关节 点进 行 处理 , 当视 点 与 节 点 中心距 离大于所给 定 闭值 时缩减 高精度 节点 , 反之剖 分低精 度 节 点。该 方 法减 少 了所 需渲 染 的三 角形的数 目, 与地形 简化 目的相一 致 , 实验 证 明新裂缝 消除算 法可行且 有效 。 关 键 词: 四叉树 ;O 系统仿 真 L D; 文献 标识码 : A 中图分 类号 :P3 19 T 9 .
第2 3卷
第 4期
北 京 机 械 工 业 学 院 学 报
Jun l f e i s t eo Mah e ora o in I tu f ci r B jg n it ny
Vo . No. 123 4
20 0 8年 1 2月
De . 0 8 e20
文 章 编 号 :0 8—15 ( 0 8 0 0 n mb ro e e s r e d rn ra l s a d s r e t e u p s f tran smp i c t n u e f n c s a y r n e i g tinge n e v s h p r o e o e r i i lf ai .Ex rme t i o pe i ns
d sa c ewe n v s n p i ta d n d e tr i g e tr ta h ie l s g v l e, e h g - r c s n itn e b t e i o o n n o e c n e r ae h n t e gv n co i - au t ih p e i o i s n h i n d s ae rd c d n t e c n r r , h o p e i o o e r u d vd d T i me h d r d c s t e o e r e u e .O h o ta y t e lw— r c s n n d s a e s b ii e . h s i to e u e h
基于视点的多分辨率地形LOD生成方法
同一场景或场景中的物体 , 用具有不同细节的描述 方法得 到一 组 新 模 型 的技 术 。显 示 时 根 据 某种 判
断条件 , 当 的选 择某 个 细 节 层 次模 型进 行 显 示 。 适
点因素的影 响 ; 网格 简化过程更 易于理解 和执 使
行 , 能满足 地形 可视 化 的基本要 求 。 并
点表示 , 并移去退化多边形 ; ③几何元素删除算法 。 其 中包 括 : 直接 删 除法 、 近平 面合 并法 及边 折 叠法 。
通过 一定 的评 价标 准 , 行点 、 、 或三 角形 的删 执 线 面
4 3 视 点相 关 的 L D选择 标 准 . O
根 据 模 型 在场 景 的位 置 和重 要 性 来 动态 调 整 网格 的复杂 度 , 文用 三 个 参 数 来 表 示 : 视 点 与 本 ①
L D技术允许 在不影响 图像质量 的前 提下 , O 以不 同的细节 表 达 同一三维 模 型 , 合 观察 点 的位 置 并结
决定 模 型细 节 的选 择 , 以减 少 图形 处 理 的复 杂度 ,
2 相 关 研 究
L D技术 发展 至今 已形 成 了一 套 极 为 繁 荣 的 O
提高图形生成效率 , 达到实时动态绘制要求 。实时
收稿 日期 :0 6年 1 月 1 20 1 6日, 回 日期 :06年 1 月 2 修 20 1 3日
作者简介 : 黄振亮 , , 男 副教授 , 研究方 向为 电力 电子及 自动控制研究 。
维普资讯
20 07年第 3期
舰 船 电 子 工 程
类 5: 自 卜_ ① 适应细分型算法。输人原始模 型的 ] 最初形式 , 根据指定 的误差容限 , 多次细分生成简 化模型 ; ②采样性算法 。将空间划分为多个立方单 元, 计算单元 中各顶点 的代表点 , 将该 点用其代表
数字地形模型生成方法与精度控制
数字地形模型生成方法与精度控制数字地形模型(Digital Elevation Model,DEM)是利用数字化技术对地球表面地形进行测量和建模的一种方法。
它是地理信息系统(Geographic Information System,GIS)中的重要数据源,广泛应用于地质勘探、水资源管理、城市规划等领域。
本文将探讨数字地形模型的生成方法以及精度控制。
一、数字地形模型的生成方法数字地形模型的生成方法主要包括全球定位系统(Global Positioning System,GPS)测量法、摄影测量法和激光扫描测量法等。
1. GPS测量法GPS是一种利用卫星信号测量地球表面位置的技术。
通过在地面放置GPS接收器,可以接收到卫星发射的信号,并计算出地面点的经纬度坐标和海拔高度。
将多个测量点的坐标数据进行处理和插值,就可以生成数字地形模型。
2. 摄影测量法摄影测量法是通过航空或航天器拍摄的照片进行测量和测绘。
通过对照片进行解译和解析,可以获取地面点的坐标和高度信息。
结合地面控制点的数据,可以生成数字地形模型。
3. 激光扫描测量法激光扫描测量法利用激光束进行测量和采样。
激光扫描仪将激光束发送到地面,并记录回弹的时间和位置信息。
通过计算激光束与地面的交点,可以得到地面点的坐标和高度信息。
将这些点云数据进行处理和滤波,就可以生成数字地形模型。
二、数字地形模型生成的精度控制在数字地形模型的生成过程中,精度的控制是至关重要的。
精度的提高可以提高地形模型的准确性和可靠性,进而为后续的分析和应用提供可靠的数据支持。
1. 数据收集精度控制在实施测量和数据采集时,需要通过控制点和目标点的选择、测量仪器精度的校准等手段来提高测量数据的精度。
在GPS测量中,增加卫星接收机的数量和精度可以提高定位的准确性。
在摄影测量中,选择高分辨率的相机和合适的航拍高度可以提高照片的像控点密度和测量精度。
在激光扫描中,选择合适的扫描参数和扫描密度可以提高点云数据的密度和精度。
网格化数字地形模型的构建与分析方法

网格化数字地形模型的构建与分析方法数字地形模型(Digital Terrain Model,DTM)是通过数字化地表高程数据构建的地形模型。
随着技术的发展,越来越多的研究和应用领域开始需要高精度和高分辨率的数字地形模型。
网格化数字地形模型的构建与分析方法成为研究和应用领域的关注点之一。
本文将就网格化数字地形模型的构建方法、性能评估以及相关的分析方法进行探讨。
一、数字地形模型构建方法1. 激光雷达扫描法激光雷达扫描法是一种常用的数字地形模型构建方法。
通过激光雷达设备对地面进行扫描,获取多个点云数据,然后通过点云数据的处理与过滤,提取出地面点,最终构建数字地形模型。
这种方法具有高精度、高效率的特点,被广泛应用于地形测绘、城市规划等领域。
2. 遥感影像解译法遥感影像解译法是另一种常用的数字地形模型构建方法。
通过分析遥感影像中的地物特征,如纹理、颜色等,利用图像处理算法提取出地面特征,构建数字地形模型。
这种方法适用于大范围、连续的地形建模,具有覆盖范围广、成本较低的优势。
3. 高精度测量法高精度测量法是一种精度要求较高的数字地形模型构建方法。
通过使用全站仪、GPS等高精度测量设备,对地表进行多个采样点的测量,然后通过插值算法将测量数据进行空间插值,得到数字地形模型。
这种方法适用于对特定区域进行高精度建模,如交通规划、基础设施建设等领域。
二、数字地形模型性能评估1. 精度评估数字地形模型的精度是衡量其质量的重要指标。
可以通过与实地测量数据进行对比,计算出误差值,进而评估数字地形模型的精度。
同时也可以利用地形分析工具,进行地形曲率、坡度、坡向等指标的计算,从而评估数字地形模型的几何特征。
2. 数据密度评估数据密度是指数字地形模型中数据点的分布情况。
数据密度评估可以通过统计每个网格单元内的数据点数量,并计算出平均密度值。
高密度的数字地形模型能够更准确地反映地形的细节特征。
3. 数据分辨率评估数据分辨率是指数字地形模型中每个网格单元的大小。
多分辨率LOD模型的简化算法——基于实时漫游的TIN地形

多分辨率LO D模型的简化算法——基于实时漫游的TI N地形全蕾司红伟(东华理工大学数学与信息科学学院,江西抚燃344000)摘要:对H O PPE视区裁剪算法中包围球的建立方法避行了改迸,提出一种基于视角变化和LO D技术的视区动态包围球裁剪算法。
使用该算法构造基于TIN地形的多分辨率LO D模型,避免了节点误判及大量无谓的节点分解计算,提高了实时漫游圭电形建模速度。
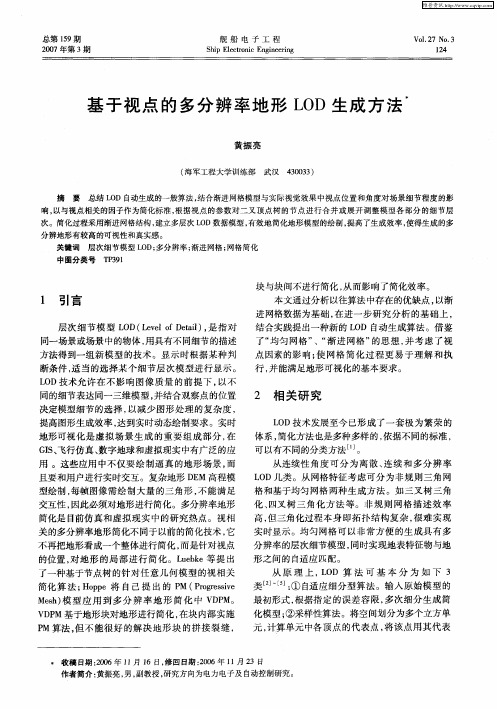
关键蕾霹:缝影冒筏化;HO P憝_蒡法;T IN造影;LO D模鍪;麓化‘1引富地形是人类社会赖以生存并从攀一切实践瀵渤的根基。
地形霹橇{乏技术是}}冀税鬻形学豹~令重要应麓领域稻研究方向,一直是人们的研究热点。
在图形二i维显示中。
往往采用不规则=三角网(”N:Tf i ang ul at exl l r r egadar N et w or k)表示地形表面,如躅l。
瑷1T I N地形模型缝形澄游建模麓特点:准确性。
溉察者撬掇弦菜一时刻,掰观察判的音11分地形,判断其在整张地形图中的位鬣。
,要求生成的模型要在一定的视觉误箍范围内;真实性:地形表黼模型的生成皮辗据相对观察者攫点瓣远近,绘予多分辨攀,鼯离视点远酶分辨率低,跨离视点近分辫窜高。
目前..鹱于当前计算机硬件的发腮现状.对予实现具有特征的大数据域地形实时漫游,既委保持视觉效果。
叉鼷提供较岛的露《赣频率,仍是一大难题。
从建模酶角度来鼹决大数据量建形的实时显示问题,是目翦解决这个问题的重要方法¨i。
其中,构造、简化地形表丽的多分辨攀LO I)模型是一个非常镦要的手段。
细节必次模型(L ayer of D et ai l s.L O D)是一种表达多种不同猿度本平黪数字裹程攘磺。
L O D技零穰霉夫眼盼疆觉冗余特性,按照视线方向和鞭离视点的远近及地物本身的复杂程度不同,对地形场景的不同部分采用不『司稷度的细节屡次进行描述。
这种攥述疗法。
不仅符合人眼的视觉观察特性,更大大的减小的缝彩绘嗣避缀审需要处壤的二角形数爨,攘速r施髟酶实融绘制速度。
三维地形中多分辨率影像模型建模方法
地形 的真 实性 是地形 可视化 的重要 组成部 分。 使
的 Cl — p技术【 3, 而实现任意大小影像 的纹理 i Ma p 11 - 从 映射。在实际 中,大规模 地形的高分辨率纹理影像远 远 大于该 限制 ,为 满足计算机 图形渲 染设备的要求 ,
i n e s t e p e e a e t r .I r e d r s e is f ce c f te c n e to a n ltx u e t e d h ic me ltx u e n o d rt a d e s t n u o h i in y o o v n in lma ua e t r h p e e a ,ti a e a r d c d t e ma e t x r u o tc p e e a rn il n meh d,a d ic me l h s p p r h s p o u e i g e t e a t mai ic me lp icp e a d h u to n
OU ANG e g , HOU a - i g Y F n Z Xi o P n  ̄
(. h n qn rnp r t nMa a e n d nut gC . t. f hn , h n qn 0 0 0 C ia 1C o g igTa sot i n g met n s ln o, d o C ia C o g ig 0 6 , hn ; ao a Co i L 4
e p r n rv sta i meh d d e o ny rd c h e n t t n q ai ,b ti l be t x ei tpo e tt s to o sn to l e u e ted mo sr i u l me h h ao y t u sas a l o o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西北工业大学学报 Jclurnal of Northwestern Polytechnical University
Feb.
2009
V01.27 No.1
基于小波分析的多分辨率地形模型生成算法研究
翟正军,王培,姜红梅
(西北工业大学计算机学院,陕西西安710072)
摘 要:为了解决海量地形数据无法直接连续地实时绘制的问题,文章提出了基于小波分析的多分 辨率地形模型生成算法。该算法利用小波分析对数字高程模型(Digital Elevation Model,DEM)数 据进行简化压缩,采用四叉树结构表示地形,利用金字塔结构存储地形,构建了视点相关多分辨率 地形模型,并给出了基于该模型的地形实时绘制方法。实验表明,该算法结构简单,能高效地生成地 形多分辨率模型,地形数据量大大减少,且地形逼真程度高,能够实现大规模地形实时绘制。
收稿日期:2007—10-11 作者简介:翟正军(1965--),西北工业大学教授,硕士生导师,主要从事计算机应用技术、测试控制与仿真及嵌入式系
统的研究。
万方数据
.78.
西北工业大学学报
第27卷
Vf(z)和Vj(y)的张量积,可得:Vi(z,y)=y』(z)
oV』(y)。
由于地形数据中的信号为有限能量函数f(x,
int nLeft,nTop,nRight,nBottom;∥结点覆 盖区域的4个角点坐标
DEMData*pLL;∥结点的近似图像(低频区 域DEM)指针
float fError;∥结点覆盖区域分辨率所允许的 最大误差,匹配分辨时使用 )
利用四叉树的快速遍历和查找算法,根据视点 变化和绘制要求,可以快速从树根依次向下查找到 所需要分辨率的地形分块。要求对各数据块进行可 见性测试和分辨率测试。首先判断根结点即整个地
四叉树结点的数据结构定义如下[6]: struct DEMTreeNode (
int nLOD;∥块的LOD级别,用于计算小波分 解级数
DEMTreeNode*pParentNode;∥父结点指 针
DEMTreeNode*pChildenNode[4]~f}4令寻 结点指针
Point3D*pCenter3D;∥结点覆盖区域的中 心三维坐标
关键 词:小波分析;类号:TP391.9
文献标识码:A
文章编号:1000—2758(2009)01—0077—06
在战场环境仿真系统中,逼真的战场环境是作 战仿真之基础,具有真实自然视觉效果的地形仿真 建模技术变得越来越重要。为反映某地的真实地形, 一般采用数字高程模型(DEM)表示地形。然而在战 场环境仿真过程中,要经历相当广阔的地域,所加载 的数据量十分庞大,直接使用原始DEM数据进行 可视化不现实[1]。为了不影响显示质量的连续生成 地形模型,研究多分辨率地形模型生成算法十分必 要。在多分辨率地形模型生成研究中,需要始终贯穿 细节层次技术(Level of Detail,LOD)的思想。采用 简单的隔行抽稀法[2】可以按视点距离对规则网格进 行DEM分层,简化不同LOD层次的DEM。该方法 可以在一定程度上降低地形复杂度,但地形绘制的 精度有所降低,最主要的是不能将低分辨率的DEM 逆变换到高分辨率的DEM。为此谭兵等人采用一种 与视点相依赖的对地形结点误差进行评价的方法, 基于约束四叉树构建了地形多分辨率模型[3],该方 法先将地形和纹理数据装入内存再进行处理,难以 满足超大规模地形区域可视化实时绘制的要求。
成列滤波。小波分析通过高频和低频滤波变换,生成
1个原始图像的近似图像(低频区域)LL,3个细节
图像(高频细节)LHl、HLl、HHl。
应用两尺度关系,可以由{ckIn,。)及{此。.。}重构
{Ck+l。。},其算法如下
3
“+h…=∑(Pn-zt,m-ZFⅥ。J+∑磊咄。一巧dl以0
f,』
f=1
图3是重构的数据传递示意图,图中2十表示
对于大规模地形数据而言,一般金字塔存储结 构中的分块数量都比较大,为了在地形绘制时能根 据视点的变化快速查找到所对应的分辨率数据分 块,本文采用四叉树细节层次模型构造基于金字塔 存储结构的多分辨率地形的索引结构。
四叉树结构与地形数据的地理信息在坐标系统 上有天然的统一,利用四叉树结构可以方便对地形 进行分块细分,有利于将二维纹理图像映射到三维 地形表面,能降低格网动态更新时间,加快地形的实 时绘制,且数据结构简单。
构建大规模多分辨率地形数据的金字塔结构 时,首先把原始地形数据作为金字塔的底层,郎第0 层,并对其进行分块,形成第0层瓦片矩阵。在第0 层的基础上,经过1次小波分解生成第1层,并对其 进行分块,形成第1层瓦片矩阵。再在第1层的基础 上采用同样的方法生成第2层瓦片矩阵,如此下去, 构成整个瓦片金字塔,如图4所示。假设按64×64 个象素大小对原始数据进行分块,则当第l层的象 素矩阵小于或等于64×64时,金字塔构建完毕。
由^+l(z,y)=^(z,y)+区1’o,y)+g{2’
(z,y)+g{3’(z,y),反(z,y)∈W名(i=1,2,3)及
{“+1.…)得到分解算法
fCj,。。=∑钆州一以+1.埘
l
。’J
【di。。=∑6;一。.。,一细“+,,埘
式中{a…},(以.。}为分解序列,{“。。},{du.。)为分解 系数。
1基于小波分析的地形多分辨率模型 生成算法
1.1小波分析的分解与重构算法 地形处理中,DEM矩阵都是二维离散信息,对
任一点o,y)都有高程值f(x,y)与之对应,因此要 将小波分析应用到DEM数据的处理中,首先就必 须将一维小波理论向二维进行推广。常用的方法是 将二维函数空间看成是由2个相等的一维函数空间 的张量乘积,即假设二维函数空间∥(z)可以沿z、Y 2个方向进行分离,可将其分解成2个一维空间
y)∈Lz(JR),利用二元张量积小波分析口3,形成
f(x,y)∈L2(IR2)中的一个多分辨分析{V·},
{奴m,(z,y):_『,Z∈Z}是玑的基底。
设Ⅳ:是y0。中关于班(f=1。2,3)的正交补空
间,而声(z,y)是相应的尺度函数,矿(z,y)、铲(z,
y)、矿(z。y)是3个小波函数。其中声(z,y)=
声1(z)妒(y),矽(z,y)=庐1(z)矿(y),妒(z,y)一矽
(z)妒(y),矿(z,y)一矿(z)矿(y),∥(z)(f=1,2)为
一元尺度函数,矿(z)(歹=1,2)为一元小波函数。
根据一元两尺度关系
愀z)=∑户:声1(2x一行)
.{
。
及
【矿(z)一∑g:尹(2z一雄)
f尹(y)=∑棚Cz(2y一竹)
为了实现大规模地形海量数据的交互实时绘 制,必须对其进行有效的数据组织和管理,数据分块 已经成为一种管理地形数据的通行方法。用户可以 根据DEM数据的大小进行任意分块,但是子块划 分必须满足2个原则:①划分的子块数应小于子块 内的网格数;②子块网格的行数和列数应尽量相等。 一般来说,为编程方便,分块的方法大多使用平均分 块法。考虑到Intel CPU的内存页大小是4 K,块的 大小取64×64比较合适。这样的存储结构在一定程 度上能提高存储效率,降低内存缺页的次数。
样数为原来样数的2倍。
Cb.m)
图3小波重构数据流示意图 图中P2(咒)、q2(”)分别是低通和高通滤波器, 完成列滤波;户1(研)、q1(研)为低通和高通滤波器,完 成行滤波。
万方数据
第1期
翟正军等:基于小波分析的多分辨率地形模型生成算法研究
通过小波多分辨率分析,新的空间数据集不仅 可以从较详细程度的空间数据集派生较概略程度任 意尺度的空间数据集,而且可以完成其逆过程,实现 完备的重构。高分辨率的DEM数据经过小波变换 后的低频区域就可看作是简化后的低分辨率DEM 数据。 1.2 多分辨率地形模型存储和索引数据结构
在地形绘制中,不同分辨率结点同时存在于每 一帧图像中,这样往往会导致不同分辨率结点之间 产生“裂缝”[1“]。裂缝是由于相邻结点的分辨率不一 致所造成的。如图5所示,结点Ⅳ。具有较低的分辨 率,与之相邻的结点Ⅳ,、Ⅳ。有较高的分辨率。如果 Pz点的高程数据和P。尸。中点Pl的值不相等,则会 使得P。、Pz、尸。之间形成了没有被覆盖的区域 尸,尸。只P,,从而在地形绘制的时候将出现裂缝。笔 者借鉴文献[1]介绍的消除裂缝的方法,调整结点 的连接关系,以使两者的边界真正彼此吻合。在动态 调整过程中通过迭代不断对相邻结点进行三角剖 分。对四叉树的每一节点来说,可以采用直接对角剖 分和保留中点剖分方法。
万方数据
西北工业大学学报
第27卷
形所表示范围是否在可见区内或交叠,若可见则对 该结点进行分辨率测试,若不满足要求则对该块4 个子结点分别重复以上过程进行可见性测试和分辨 率测试,将满足可见性测试和分辨率测试条件(或到 达树的最底层)的结点,加入实时显示结点集合。 1.3多分辨率测试和裂缝处理
采用视点相关的层次细节模型来实时绘制地 形,需要选择不同的分辨率来绘制进入可见区的地 形面片。决定地形面片采用分辨率的因素有:地形面 片所描述地形本身的起伏程度和地形面片与视点之 间的关系。对于地形起伏比较大的地域,需要采用更 高的分辨率来对其进行描述;如果地形平坦则可以 用较低的分辨率对地形进行描述而不会影响视觉效 果。笔者借鉴文献[1]介绍的结点误差量度,对可见 结点进行多分辨率测试,即对于可见结点判断动态 误差是否满足误差要求,如果动态误差大于误差阈 值,则取该结点的4个子结点来重新判断,反复直至 小于误差阈值或者是已经达到最高分辨率。
为了存储、管理和调度这些分块之后的地形数 据,本文应用金字塔存储结构和四叉树索引结构作 为大规模多分辨率地形的数据结构,以减少不同分 辨率需求的数据访问量。
本文采用倍率方法构建多个分辨率层次的金字 塔,并采用树的数据结构组织和管理多分辨率地形 数据,可依据视点的变化选用具有不同细节的场景 模型,从而可提高地形的实时绘制速度。