SVPWM的原理及法则推导和控制算法详解
SVPWM的原理和法则推导和控制算法详细讲解
SVPWM的原理和法则推导和控制算法详细讲解SVPWM(Space Vector Pulse Width Modulation)是一种三相不对称多电平PWM调制技术。
其原理是将三相电压转换为空间矢量信号,通过调制的方式控制逆变器输出电压,以实现对三相电机的控制。
下面将详细介绍SVPWM的原理、法则推导以及控制算法。
一、原理:SVPWM的原理在于将三相电压分解为两相,即垂直于矢量且相互垂直的两个分量,直流坐标分量和交流坐标分量。
其中,直流坐标分量用于产生直流电压,交流坐标分量用于产生交流电压。
通过对直流和交流坐标的调制,可以生成所需的输出电压。
二、法则推导:1.将三相电压写成直流坐标系下的矢量形式:V_dc = V_d - 0.5 * V_a - 0.5 * V_bV_ac = sqrt(3) * (0.5 * V_a - 0.5 * V_b)2. 空间矢量信号通过电源电压和载波进行调制来生成输出电压。
其中,电源电压表示为空间矢量V。
根据配比原则,V_dc和V_ac分别表示空间矢量V沿直流和交流坐标的分量。
V = V_dc + V_ac3.根据法则推导,导出SVPWM的输出电压:V_u = 1/3 * (2 * V_dc + V_ac)V_v = 1/3 * (-V_dc + V_ac)V_w = 1/3 * (-V_dc - V_ac)三、控制算法:1. 设定目标矢量Vs,将其转换为直流坐标系分量V_dc和交流坐标系分量V_ac。
2.计算空间矢量的模长:V_m = sqrt(V_dc^2 + V_ac^2)3.计算空间矢量与各相电压矢量之间的夹角θ:θ = arctan(V_ac / V_dc)4.计算换向周期T和换相周期T1:T=(2*π*N)/ω_eT1=T/6其中,N为极对数,ω_e为电机的角速度。
5.根据目标矢量和夹角θ,确定目标矢量对应的扇区。
6.根据目标矢量和目标矢量对应的扇区,计算SVPWM的换相角度β和占空比:β=(2*π*N*θ)/3D_u = (V_m * cos(β) / V_dc) + 0.5D_v = (V_m * cos(β - (2 * π / 3)) / V_dc) + 0.5D_w=1-D_u-D_v以上步骤即为SVPWM的控制算法。
svpwm的原理及法则推导和控制算法详解
svpwm的原理及法则推导和控制算法详解SVPWM是一种空间矢量脉宽调制技术,常应用于交流电机的无传感器矢量控制方案中。
SVPWM的原理及法则推导涉及到三相交流电机理论、空间矢量分析以及脉宽调制等内容。
下面将对SVPWM的原理、法则推导和控制算法进行详解。
1.SVPWM原理SVPWM的原理是基于交流电机的三相正弦波电流与空间矢量之间的转换关系。
交流电机的电流空间矢量可以表示为一个复数形式,即电流空间矢量(ia, ib, ic) = ia + jib。
空间矢量在空间中对应一个电机角度θ。
SVPWM的目标是控制交流电机的三相正弦波电流,使其与预期空间矢量一致,从而控制电机输出力矩和转速。
SVPWM首先对预期空间矢量进行空间矢量分解,将其分解为两个基本矢量Va和Vb。
然后根据电机角度θ和两个基本矢量的大小比例,计算出三相正弦波电流的幅值和相位。
2.SVPWM法则推导SVPWM的法则推导是为了实现精确控制电机的输出力矩和转速。
在法则推导中,首先需要建立电流与电压之间的关系,然后计算出三相正弦波电流的幅值和相位。
最后根据幅值和相位生成PWM波形,控制交流电机的动作。
具体推导过程如下:-步骤1:计算Va和Vb的大小比例,根据预期空间矢量和电机角度θ,可以通过三角函数计算出Va和Vb的幅值。
-步骤2:计算Vc,由于交流电机为三相对称系统,Vc的幅值等于Va和Vb的和,相位等于Va相位加120度。
-步骤3:计算三相正弦波电流的幅值和相位,幅值可以通过输入电压和阻抗模型计算得到。
-步骤4:根据幅值和相位生成PWM波形。
3.SVPWM控制算法SVPWM控制算法实现了对交流电机输出力矩和转速的精确控制。
- 步骤1:通过位置传感器或者传感器less技术获取电机角度θ。
-步骤2:根据预期输出力矩和转速,计算出预期空间矢量。
-步骤3:根据电机角度θ和预期空间矢量,计算出Va和Vb的幅值。
-步骤4:根据Va和Vb的大小比例和Vc的相位,生成PWM波形。
SVPWM的原理及法则推导和控制算法详解

SVPWM的原理及法则推导和控制算法详解Space Vector Pulse Width Modulation(SVPWM)是一种用于交流电机驱动的调制技术。
它的原理是将固定电压向量分解为两个可控向量,通过改变这两个向量的占空比来控制交流电机的输出。
SVPWM利用矢量图法将三相交流电源的空间矢量变换为两相旋转矢量,从而实现对交流电机驱动电压的控制。
1.假设存在一个以0为中心的静止坐标系,其中电源相电压为Va,Vb,Vc。
我们可以将这三个电压写成以时间为函数的形式,即Va(t),Vb(t),Vc(t)。
2.将Va,Vb,Vc投影到α-β坐标系,得到α轴上的电压Vaα(t),Vbα(t),Vcα(t)和β轴上的电压Vaβ(t),Vbβ(t),Vcβ(t)。
3. 将α-β坐标系反转回静止坐标系,得到参考电压Va_ref(t), Vb_ref(t), Vc_ref(t)。
4.将参考电压投影到空间矢量图上,从而得到交流电机的输入矢量。
5.根据参考电压和输入矢量之间的关系,推导出控制算法。
1.基于所需输出电压的矢量长度和角度,计算矢量图中的两个矢量的占空比,分别为d1和d22.根据矢量长度和角度,计算三个相电压的占空比,分别为d_a,d_b,d_c。
3.根据SVPWM的特性,当d1,d2为0时,输出电压为0;当d1,d2相等时,输出电压处于峰值;当d1和d2不相等时,输出电压的大小和方向都有所改变。
因此,通过改变d1和d2的数值,可以改变输出电压的大小和方向。
4.根据d_a,d_b,d_c和d1,d2的数值,计算出PWM控制信号。
5.将PWM控制信号施加到交流电机驱动电路中,从而实现对输出电压的控制。
总结起来,SVPWM通过将固定电压向量分解为两个可控向量,通过改变这两个向量的占空比来控制交流电机的输出。
通过合理推导和计算,可以得到控制算法,从而实现对输出电压的精确控制。
SVPWM是一种高效且精确的交流电机驱动技术,被广泛应用于工业控制中。
SVPWM的原理及法则推导和控制算法详解130801

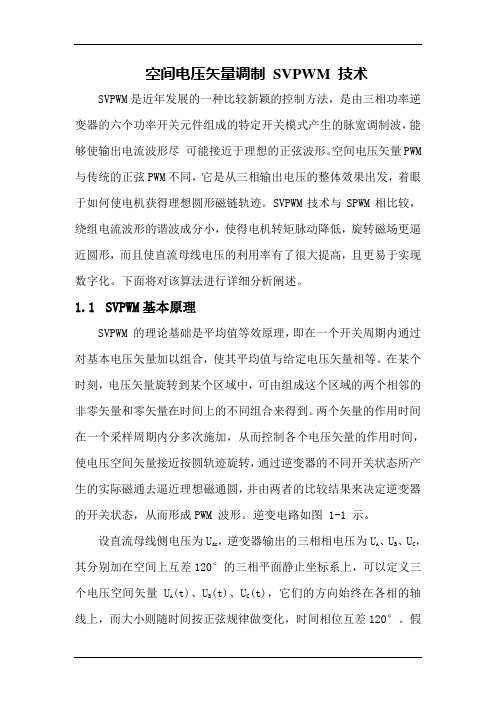
空间电压矢量调制SVPWM 技术SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1SVPWM基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图1-1 示。
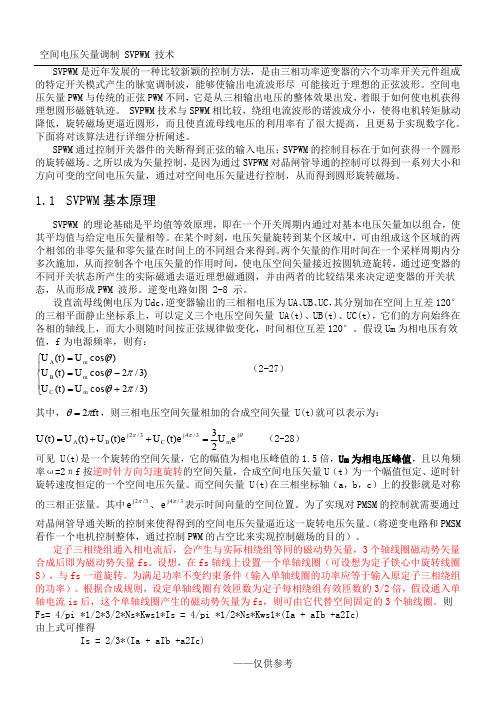
设直流母线侧电压为U dc,逆变器输出的三相相电压为U A、U B、U C,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量U A(t)、U B(t)、U C(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设U m 为相电压有效值,f 为电源频率,则有:()cos()()cos(2/3)()cos(2/3)A mB m Cm U t U U t U U t U θθπθπ=⎧⎪=-⎨⎪=+⎩ (1-1)其中,2ft θπ=,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:2/34/33()()()()2j j j A B C m U t U t U t e U t e U e ππθ=++=(1-2)可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,U m 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c)上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解第五修改版

SVPWM的原理及法则推导和控制算法详解第五修改版原理及法则推导:1.基本思路:2.空间向量分解:将直流电压分解为两个共轭的正弦波电压(Va,Vb),并根据三相电流量的大小,将电压分解为三个矢量(Vr,Vs,Vt)。
这三个矢量之间的关系可以用空间矢量图表示,这个图形是一个空间向量图,被称为电流空间矢量图。
3.电流空间矢量图到电压空间矢量图的映射:通过坐标变换,将电流空间矢量图映射到三相电压空间矢量图,可以得到两个电压矢量(Ualpha,Ubeta)和一个零矢量U0。
这三个矢量构成了电压空间矢量图。
4.电压空间矢量图到PWM信号的调制:将电压空间矢量图通过PWM技术进行调制,即将电压矢量的变化映射为三个用于控制晶闸管导通的PWM信号。
通过调节PWM信号的占空比和频率,可以控制电流的大小和方向。
控制算法详解:1.根据给定的控制量(例如转矩、转速等)计算电流空间矢量(Vr,Vs,Vt)的大小和方向。
2. 根据电流空间矢量的大小和方向,通过坐标变换得到对应的电压空间矢量(Ualpha,Ubeta)。
3. 将电压空间矢量(Ualpha,Ubeta)进行空间矢量调制,得到三个PWM信号。
4.根据PWM信号的占空比和频率,控制晶闸管的导通与关闭,实现对电流的控制。
5.循环执行上述步骤,实现对交流电机的调速控制。
1.控制精度高:通过空间矢量调制技术,可以实现对电流的精确控制,提高系统的稳定性和控制精度。
2.输出电压低谐波:SVPWM可以减小输出电压的谐波含量,减少对电机和电网的干扰。
3.谐波承载能力强:SVPWM可以根据需要调整PWM信号的频率和占空比,增加电机对谐波的承载能力。
4.转矩波动小:SVPWM可以通过调整PWM信号的频率和占空比,减小电机的转矩波动,提高系统的稳定性和控制性能。
总结:SVPWM是一种先进的矢量控制技术,可以用于交流电机的无刷直流调速控制和电网无功功率调节。
通过将电流空间矢量图映射到电压空间矢量图,然后通过PWM调制技术对电压进行调制,可以实现对交流电机的精确控制。
SVPWM的原理及法则推导和控制算法详解
空间电压矢量调制 SVPWM 技术SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 1-1 示。
设直流母线侧电压为U dc,逆变器输出的三相相电压为U A、U B、U C,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 U A(t)、U B(t)、U C(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设U m 为相电压有效值,f 为电源频率,则有:()cos()()cos(2/3)()cos(2/3)A mB m Cm U t U U t U U t U θθπθπ=⎧⎪=-⎨⎪=+⎩ (1-1)其中,2ft θπ=,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:2/34/33()()()()2j j j A B C m U t U t U t e U t e U e ππθ=++=(1-2) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,U m 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c)上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解
S V P W M的原理及法则推导和控制算法详解Last revision date: 13 December 2020.1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
SVPWM的原理及法则推导和控制算法详解

SVPWM的原理及法则推导和控制算法详解SVPWM全称为Space Vector Pulse Width Modulation,是一种用于交流电驱动的脉宽调制技术。
它通过对电压波形进行合适的调制,实现对交流电驱动变频器输出电压的精确控制。
以下是SVPWM的原理及法则推导和控制算法的详解。
1.原始正弦信号:首先,将三相交流电压信号转化为矢量信号表示。
当输入的三相正弦信号为:$$v_a=v_m\sin(\Omega t)$$$$v_b=v_m\sin(\Omega t - \frac{2\pi}{3})$$$$v_c=v_m\sin(\Omega t + \frac{2\pi}{3})$$其中,$v_m$为幅值,$\Omega$为频率,t为时间。
2.空间矢量表示:将交流信号的三相信号进行矩阵变换,转化为空间矢量表示,例如:$$V_s=\frac{2}{3}\begin{pmatrix} 1 & -\frac{1}{2} & -\frac{1}{2}\\ 0 & \sqrt{3}/2 & -\sqrt{3}/2\end{pmatrix}\begin{pmatrix} v_a\\ v_b\\ v_c \end{pmatrix}$$其中,$V_s$表示空间矢量表示。
3.空间矢量模量:空间矢量模量的大小表示输出电压的幅值,可以通过以下公式计算:$$V=\sqrt{V_s^2}=\sqrt{V_a^2 + V_b^2 + V_c^2}$$4.空间矢量相位:空间矢量相位表示输出电压的相位位置,可以通过以下公式计算:$$\theta=\tan^{-1}(\frac{V_b}{V_a})$$5.确定电压矢量分量:根据设定的输出电压幅值和相位,可以计算出两个主要输出电压分量$V_d$和$V_q$,分别代表感应电机电流的直流成分和交流成分。
6.电压矢量分解:通过将输出电压分解为两个主要分量$V_d$和$V_q$,可以表示为:$$V_d=V_s\cos(\theta - \gamma)$$$$V_q=V_s\sin(\theta - \gamma)$$其中,$V_s$为空间矢量模量,$\theta$为空间矢量相位,$\gamma$为极坐标相角,用来调整电压波形的对称性。
SVPWM的原理及法则推导和控制算法详解

一直以来对SVPWM 原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。
经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。
未敢私藏,故公之于众。
其中难免有误,请大家指正,谢谢!1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28)可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解

S V P W M的原理及法则推导和控制算法详解Company number:【0089WT-8898YT-W8CCB-BUUT-202108】空间电压矢量调制 SVPWM 技术SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 1-1 示。
设直流母线侧电压为U dc,逆变器输出的三相相电压为U A、U B、U C,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 U A(t)、U B(t)、U C(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设U m 为相电压有效值,f 为电源频率,则有:()cos()()cos(2/3)()cos(2/3)A mB m Cm U t U U t U U t U θθπθπ=⎧⎪=-⎨⎪=+⎩ (1-1)其中,2ft θπ=,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:2/34/33()()()()2j j j A B C m U t U t U t e U t e U e ππθ=++=(1-2) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的倍,U m 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c)上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解
空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
SPWM 通过控制开关器件的关断得到正弦的输入电压;SVPWM 的控制目标在于如何获得一个圆形的旋转磁场。
之所以成为矢量控制,是因为通过SVPWM 对晶闸管导通的控制可以得到一系列大小和方向可变的空间电压矢量,通过对空间电压矢量进行控制,从而得到圆形旋转磁场。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,合成空间电压矢量U (t )为一个幅值恒定、逆时针旋转速度恒定的一个空间电压矢量。
(完整版)SVPWM的原理及法则推导和控制算法详解

一直以来对SVPWM 原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。
经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。
未敢私藏,故公之于众。
其中难免有误,请大家指正,谢谢!1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28)可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解
空间电压矢量调制SVPWM 技术SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 1-1 示。
设直流母线侧电压为U dc,逆变器输出的三相相电压为U A、U B、U C,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 U A(t)、U B(t)、U C(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设U m 为相电压有效值,f 为电源频率,则有:()cos()()cos(2/3)()cos(2/3)A mB m Cm U t U U t U U t U θθπθπ=⎧⎪=-⎨⎪=+⎩ (1-1)其中,2ft θπ=,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:2/34/33()()()()2j j j A B C m U t U t U t e U t e U e ππθ=++=(1-2) 可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的倍,U m 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c)上的投影就是对称的三相正弦量。
SVPWM的原理及法则推导和控制算法详解第四修改版

SVPWM的原理及法则推导和控制算法详解第四修改版SVPWM(Space Vector Pulse Width Modulation)是一种现代化的PWM调制技术,其原理是将三相交流电压转换成一个大小和方向可调的矢量,在控制器中通过调节矢量的大小和方向来控制输出电压的大小和频率。
SVPWM的原理基于矢量空间理论,其中每个矢量代表了一种输出电压组合。
SVPWM法则推导的第一步是通过将三相电压转换成两个正交的矢量,其中一个矢量分量与输出电流的矢量分量相同,即使得输出电流分量为零。
由于正交矢量的数学性质,这种组合能够实现最大的有效值和最小的失真。
第二步是在矢量空间中生成合适的矢量序列,通过调节矢量序列的占空比和相位来控制输出电压的大小和频率。
SVPWM的控制算法主要包括三个步骤:矢量选择、矢量合成和PWM波形生成。
矢量选择即根据所需的输出电压大小和频率,选择合适的矢量组合。
矢量合成即根据矢量选择的结果,计算出每个矢量对应的占空比和相位。
PWM波形生成即根据占空比和相位,生成相应的PWM波形进行输出。
在SVPWM中,矢量选择的原则是根据输出电压的大小和频率要求,在矢量空间中选择与目标电压最接近的矢量组合。
矢量合成的法则推导过程是根据矢量组合的占空比和相位关系,通过求解矢量的相位和相位间隙,以及矢量的有效值,得到矢量合成的相关参数。
PWM波形生成的原理是根据矢量合成的结果,生成相应的占空比和相位,并通过调节PWM的控制频率来实现输出电压的大小和频率控制。
总结起来,SVPWM是一种基于矢量空间理论的现代PWM调制技术。
通过选择合适的矢量组合,并将其转换成占空比和相位,可以实现对输出电压大小和频率的精确控制。
SVPWM的控制算法包括矢量选择、矢量合成和PWM波形生成三个步骤,通过这些步骤的操作,可以实现对输出电压的高效控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一直以来对SVPWM 原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。
经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。
未敢私藏,故公之于众。
其中难免有误,请大家指正,谢谢!1 空间电压矢量调制 SVPWM 技术SVPWM 是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽 可能接近于理想的正弦波形。
空间电压矢量PWM 与传统的正弦PWM 不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。
SVPWM 技术与SPWM 相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。
下面将对该算法进行详细分析阐述。
1.1 SVPWM 基本原理SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。
两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。
逆变电路如图 2-8 示。
设直流母线侧电压为Udc ,逆变器输出的三相相电压为UA 、UB 、UC ,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量 UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。
假设Um 为相电压有效值,f 为电源频率,则有:⎪⎩⎪⎨⎧+=-==)3/2cos()()3/2cos()()cos()(πθπθθm Cm B m A U t U U t U U t U (2-27) 其中,ft πθ2=,则三相电压空间矢量相加的合成空间矢量 U(t)就可以表示为:θππj m j C j B A e U e t U e t U t U t U 23)()()()(3/43/2=++= (2-28)可见 U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um 为相电压峰值,且以角频率ω=2πf 按逆时针方向匀速旋转的空间矢量,而空间矢量 U(t)在三相坐标轴(a ,b ,c )上的投影就是对称的三相正弦量。
图 2-8 逆变电路由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数 Sx ( x = a 、b 、c) 为:⎩⎨⎧=下桥臂导通上桥臂导通01x S (2-30) (Sa 、Sb 、Sc)的全部可能组合共有八个,包括6个非零矢量 Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111),下面以其中一 种开关 组 合为 例分 析,假设Sx ( x= a 、b 、c)= (100), 此 时UdcUa UbUc 矢矢U4矢100矢N⎪⎩⎪⎨⎧=++=-=--===0,,0,cN bN aNc d cN aN dc bN aN dc ca bc dc ab U U U U U U U U U U U U U U (2-30) 求解上述方程可得:Uan=2Ud /3、UbN=-U d/3、UcN=-Ud /3。
同理可计算出其它各种组合下的空间电压矢量,列表如下:表 2-1 开关状态与相电压和线电压的对应关系Sa Sb Sc 矢量符号线电压相电压UabUbc Uca UaN UbN UcN 0U01 0 0 U4 Udc 0 0 dc U 32dc U 31- dc U 31- 1 1 0 U6 Udc Udc 0 dc U 31dc U 31dc U 32- 0 1 0 U2 0 Udc Udc dc U 31- dc U 31- dc U 31- 0 1 1 U3 0 Udc Udc dc U 32- dc U 31dc U 310 0 1 U1 0 0 Udc dc U 31- dc U 31- dc U 321 0 1 U5 Udc 0 Udc dc U 31dc U 32- dc U 31111U70 0 0图 2-9 给出了八个基本电压空间矢量的大小和位置。
图 2-9 电压空间矢量图其中非零矢量的幅值相同(模长为 2Udc/3),相邻的矢量间隔 60°,而两个零矢量幅值为零,位于中心。
在每一个扇区,选择相邻的两个电压矢量以及零矢量,按照伏秒平衡的原则来合成每个扇区内的任意电压矢量,即:(2-31)或者等效成下式:00****T U T U T U T U y y x x ref ++=(2-32)其中,Uref 为期望电压矢量;T 为采样周期;Tx 、Ty 、T0分别为对应两个非零电压矢量 Ux 、Uy 和零电压矢量 U 0在一个采样周期的作用时间;其中U0包括了U0和U7两个零矢量。
式(2-32)的意义是,矢量 Uref 在 T 时间内所产生的积分效果值和 Ux 、Uy 、U 0 分别在时间 Tx 、Ty 、T0内产生的积分效果相加总和值相同。
由于三相正弦波电压在电压空间向量中合成一个等效的旋转电压,其旋转速度是输入电源角频率,等效旋转电压的轨迹将是如图2-9 所示的圆形。
所以要产生三相正弦波电压,可以利用以上电压向量合成的技术,在电压空间向量上,将设定的电压向量由U4(100)位置开始,每一次增加一个小增量,每一个小增量设定电压向量可以用该区中相邻的两个基本非零向量与零电压向量予以合成,如此所得到的设定电压向量就等效于一个在电压空间向量平面上平滑旋转的电压空间向量,从而达到电压空间向量脉宽调制的目的。
1.2 SVPWM 法则推导三相电压给定所合成的电压向量旋转角速度为ω=2πf ,旋转一周所需的时 间为 T =1/ f ;若载波频率是 fs ,则频率比为 R = f s / f 。
这样将电压旋转平面等 切 割 成 R 个 小 增 量 ,亦 即 设 定 电 压 向 量 每 次 增 量 的 角 度 是 : γ=2/ R =2πf/fs=2Ts/T 。
今假设欲合成的电压向量Uref 在第Ⅰ区中第一个增量的位置,如图2-10所示,欲用 U4、U6、U0 及 U7 合成,用平均值等效可得:U ref*Tz =U 4*T4 +U 6*T6 。
图 2-10 电压空间向量在第Ⅰ区的合成与分解在两相静止参考坐标系(α,β)中,令 Uref 和 U4 间的夹角是θ,由正弦定理 可得:⎪⎪⎩⎪⎪⎨⎧-------=--+=轴轴βπθαπθ3sin ||sin ||3cos ||||cos ||666644U T T U U T T U T T U s ref s s ref(2-33) 因为 |U 4 |=|U 6|=2Udc/3 ,所以可以得到各矢量的状态保持时间为:(2-34)式中 m 为 SVPWM 调制系数(调制比), m=3|Uref|/Udc 。
而零电压向量所分配的时间为:T7=T0=(TS-T4-T6 ) /2 (2-35) 或者T7 =(TS-T4-T6 ) (2-36)得到以 U4、U6、U7 及 U0 合成的 Uref 的时间后,接下来就是如何产生实际的脉宽调制波形。
在SVPWM 调制方案中,零矢量的选择是最具灵活性的,适当选择零矢量,可最大限度地减少开关次数,尽可能避免在负载电流较大的时刻的开关动作,最大限度地减少开关损耗。
一个开关周期中空间矢量按分时方式发生作用,在时间上构成一个空间矢量的序列,空间矢量的序列组织方式有多种,按照空间矢量的对称性分类,可分为两相开关换流与三相开关换流。
下面对常用的序列做分别介绍。
1.2.1 7段式SVPWM我们以减少开关次数为目标,将基本矢量作用顺序的分配原则选定为:在每次开关状态转换时,只改变其中一相的 开关状态。
并且对零矢量在时间上进行了平均分配,以使产生的 PWM 对称,从而有效地降低 PWM 的谐波分量。
当 U4(100)切换至 U0(000)时,只需改变 A 相上下一对切换开关,若由 U4(100)切换至 U7(111)则需改变 B 、C 相上下两对切换开关,增加了一倍的切换损失。
因此要改变电压向量 U4(100)、U2(010)、 U1(001)的大小,需配合零电压向量 U0(000),而要改变 U6(110)、U3(011)、U5(100), 需配合零电压向量 U7(111)。
这样通过在不同区间内安排不同的开关切换顺序, 就可以获得对称的输出波形,其它各扇区的开关切换顺序如表 2-2 所示。
表 2-2 UREF 所在的位置和开关切换顺序对照序UREF 所在的位置 开关切换顺序 三相波形图Ⅰ区(0°≤θ≤60°)…0-4-6-7-7-6-4-0…TsT0/2T4/2T6/2T7/2T7/2T6/2T4/2T0/21111111111000010000Ⅱ区(60°≤θ≤120°) …0-2-6-7-7-6-2-0…TsT0/2T2/2T6/2T7/2T7/2T6/2T2/2T0/2111101111110100Ⅲ区(120°≤θ≤180°) …0-2-3-7-7-3-2-0…TsT0/2T2/2T32T7/2T7/2T3/2T2/2T0/21111111100111100Ⅳ区(180°≤θ≤240°) …0-1-3-7-7-3-1-0…TsT0/2T1/2T3/2T7/2T7/2T3/2T1/2T0/2111111001111110Ⅴ区(240°≤θ≤300°) …0-1-5-7-7-5-1-0…TsT0/2T1/2T5/2T7/2T7/2T5/2T1/2T0/21111110001111110Ⅵ区(300°≤θ≤360°) …0-4-5-7-7-5-4-0…TsT0/2T4/2T5/2T7/2T7/2T5/2T4/2T0/2111111110000111100以第Ⅰ扇区为例,其所产生的三相波调制波形在时间 TS 时段中如图所示,图中电压向量出现的先后顺序为 U0、U4、U6、U7、U6、U4、U0,各电压向量的三相波形则与表 2-2 中的开关表示符号相对应。
再下一个 TS 时段,Uref 的角度增加一个γ,利用式(2-33)可以重新计算新的 T0、T4、T6 及 T7 值,得到新的 合成三相类似(3-4)所示的三相波形;这样每一个载波周期TS 就会合成一个新的矢量,随着θ的逐渐增大,Uref 将依序进入第Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ区。