图像处理_CMU Town06 Motion Image Dataset(CMU 城镇模型俯瞰图像数据集6)
德罗斯特

德罗斯特效应照片制作教程先说一下什么是德罗斯特效应,德罗斯特效应(Droste effect)是递归的一种视觉形式,是指一张图片的某个部分与整张图片相同,如此产生无限循环。
就好像是说,你拿着一面镜子,然后再站在一面镜子前面,让两面镜子相对。
你看到镜子里面的情景,是相同的,无限循环的。
德罗斯特效应是一组非常有意思的照片,非常神奇,有的需要你花时间去辨别,如果你在这些图像上盯着太久,你可能会觉得自己越来越走到框架里面,甚至造成头晕、胸闷、脑子混乱…这种神奇的效果就被称为“德罗斯特效应”。
开始之前我们需要3个软件,分别是photoshop,GIMP(类似于PS),还有一个名为Mathmap 的数学软件,作为插件性质嵌入到GIMP里面,就像PS里面的滤镜一样。
可以自己到网上搜索。
下载好之后就可以进行安装了1 解压2 将 mathmap.exe, libgsl.dll, libgslcblas.dll 复制到 GIMP 插件(plugin)目录,默认是C:\Program Files\GIMP 2\lib\gimp\2.0\plug-ins3 复制 mathmaprc 、new_template.c 到C:\Users\你的用户名\.gimp-2.8\mathmap如果没有mathmap这个文件夹的话请新建一个。
1 你需要一张事先准备好做效果的图片,并在photoshop里面将需要的框架部分抠出来,背景透明,并保存为PSD或PNG文件。
抠图,换背景,加投影,加灯光调色我就不一一介绍了2.把刚才做好的PSD文件拖到GIMP里面,选择菜单的 Filters/Generic/Mathmap/Mathmap 打开Mathmap 插件,如图3.在设置面板里(Settings)去掉自动预览项(Auto Preview)4.进入Expression界面,将原有的默认代码删除,粘贴上我给你们的代码(文章最后会补上),然后就可以点预览(Preview)按钮了5.切换到 User Variables 面板,勾选 Tile Based on Transparency 和 Transparency Points In 项,然后点左边的预览(Preview)按钮感谢代码for Mathmap的原作者Breic 和改进者Pisco Bandito附代码########################################## Droste Effect code for Mathmap #### Original Code by Breic (Ben) #### Adapted by Pisco Bandito (Josh) #### Version 4.0 #### This version for Windows and Linux ###########################################You may need to alter the values of the following 9 variables to suit your image. r1=.4; # r1 is the inner radius. r1 is greater than zero and less than r2r2=1; # r2 is the outer radius. r2 is greater than r1 and less than 1p1=1; # periodicity - the number of times the image will repeat per cyclep2=1; # number of strands - the number of "arms" the spiral will have# procedural scaling and rotationzoom=.1; #Between .1 and 10rotate=-30; #Between -360 and 360# Procedural ShiftingxShift=.2; #Between -1 and 1yShift=0; #Between -1 and 1### To avoid framing problems on the largest annulus when tiling based on transparency, look# outside (levelsToLookOut) levels to see if something farther out should cover up this pixel# Try setting to 0 to see framing errors; 1 should be sufficient unless you have three or more# image layers contributing to some pixel (in which case set it to 2 or more). Larger values# slow the code down, and may lead to floating point errors.##levelsToLookOut=3;########################################################################################################################## You should not have to change anything below this line ##########################################################################################################################imageX=W; # image size, in pixelsimageY=H;minDimension=min(imageX, imageY);## User Variables, set these on the User Settings Tab ##retwist=user_bool("Do Not Retwist (Leave Unchecked for Droste Effect)");retwist=!retwist;### Tiling can be based on transparency (if the input image is a tiff), or simply based on the# radius. Using transparency, there can be protrusions between different annular layers.# Tiling based on transparency, you can decide whether you want to look inward or # outward from a transparent pixel. For example, with a frame you'll want to look inward,# while for a flower you'll want to look outward.##tileBasedOnTransparency=user_bool("Tile Based on Transparency?"); transparentPointsIn=user_bool("Transparency Points In?");# Miscellaneous variablestrue=1;false=0;epsilon=.01;##Correct the Rotation Variablerotate=pi/180*rotate;### Droste-effect code starts here# Set Droste effect parameters##alpha=atan(p2/p1*log(r2/r1)/(2*pi));f=cos(alpha);beta=f*exp(I*alpha);# the angle of rotation between adjacent annular levelsif (p2 > 0)then angle = 2*pi*p1;elseangle =-2*pi*p1;end;### Code to set up the viewport properly##if (retwist) thenxbounds=[-r2,r2];ybounds=[-r2,r2];elseybounds=[0,2.1*pi];xbounds=[-log(r2/r1), log(r2/r1)];end;xymiddle=ri:[0.5*(xbounds[0]+xbounds[1]),0.5*(ybounds[0]+ybounds[1])];xyrange=xy:[xbounds[1]-xbounds[0], ybounds[1]-ybounds[0]];aspectRatio=W/H;xyrange[0]=xyrange[1]*aspectRatio;xbounds=[xymiddle[0]-0.5*xyrange[0],xymiddle[0]+0.5*xyrange[0]];z=ri:[(xbounds[0]+(xbounds[1]-xbounds[0])*(x+W/2)/W)+xShift,(ybounds[0]+(ybound s[1]-ybounds[0])*(y+H/2)/H)+yShift];if (retwist) then # only allow for procedural zooming/scaling in the standard coordinateszinitial=z;z=xymiddle+(z-xymiddle)/zoom*exp(-I*rotate);elsezinitial=r1*exp(z); # save these coordinates for drawing a frame laterzinitial=zinitial*zoom*exp(I*rotate);end;### The Droste effect math all takes place over the next six lines.# All the rest of the code is for niceties.##if (retwist) thenz2=log(z/r1);elsez2 = z;end;logz=z2; # save these coordinates for drawing a grid laterz=p1*z2/beta;rotatedscaledlogz=z; # save these coordinates for drawing a grid laterz=r1*exp(z);## End Droste effect math## Tilingif (tileBasedOnTransparency && levelsToLookOut > 0) thenif ( transparentPointsIn) then ratio=r1/r2*exp(-I*angle); end;if (!transparentPointsIn) then ratio=r2/r1*exp( I*angle); end;z=z*exp(levelsToLookOut*log(ratio));end;### When tiling based on transparency, color is accumulated into the colorSoFar variable,# while alphaRemaining tells how much remains for lower layers to contribute (initially 1,# finally 0).##colorSoFar=rgba:[0,0,0,0];alphaRemaining=1;ix=minDimension/2*z[0];iy=minDimension/2*z[1];color=origValXY(ix,iy);colorSoFar = colorSoFar + (color*(alpha(color)*alphaRemaining)); alphaRemaining=alphaRemaining*(1-alpha(color));# do we need to look inward from the current point, or outward?sign=0;if (tileBasedOnTransparency) thenif ( transparentPointsIn && alphaRemaining > epsilon) then sign=-1; end;if (!transparentPointsIn && alphaRemaining > epsilon) then sign= 1; end;elseradius=sqrt(z[0]*z[0]+z[1]*z[1]);if (radius < r1) then sign=-1; end;if (radius > r2) then sign= 1; end;end;if (sign < 0) then ratio=r2/r1*exp( I*angle); end;if (sign > 0) then ratio=r1/r2*exp(-I*angle); end;### Iteratively move inward or outward, until# the point has radius r in [r1, r2), if tileBasedOnTransparency=false# or until alphaRemaining=0, if tileBasedOnTransparency=true# In the latter case, we accumulate color at each step##iteration=0; maxiteration=10;while (sign != 0 && iteration < maxiteration) doz2=z*ratio;z=z2;rotatedscaledlogz=rotatedscaledlogz+ri:[0,-sign*angle];ix=minDimension/2*(z[0]);iy=minDimension/2*(z[1]);color=origValXY(ix,iy);colorSoFar = colorSoFar + (color*(alpha(color)*alphaRemaining));alphaRemaining=alphaRemaining*(1-alpha(color));radius=sqrt(z[0]*z[0]+z[1]*z[1]);sign=0;if (tileBasedOnTransparency) thenif ( transparentPointsIn && alphaRemaining > epsilon) then sign=-1; end;if (!transparentPointsIn && alphaRemaining > epsilon) then sign= 1; end;elseradius=sqrt(z[0]*z[0]+z[1]*z[1]);if (radius < r1) then sign=-1; end;if (radius > r2) then sign= 1; end;end;iteration=iteration+1;end;color=colorSoFar;color=rgba:[color[0], color[1], color[2], 1]; # set the alpha value to 1 (it could be <1 if the loop terminated at iteration maxiteration)#This last line is important, it returns the pixel value for the current pixel color。
grid_sample 原理
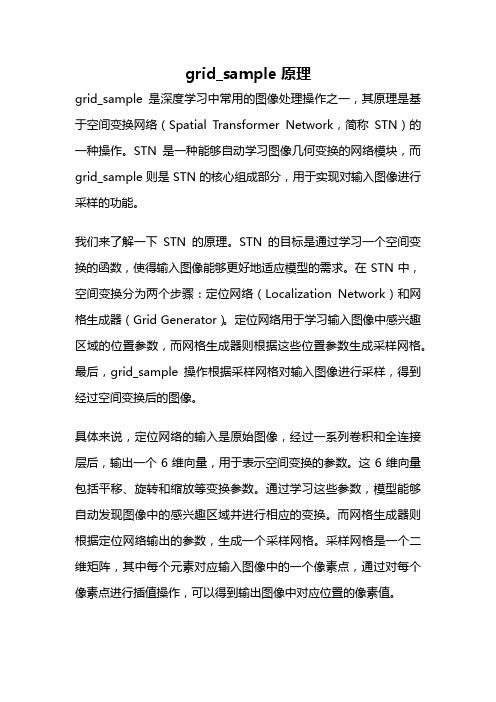
grid_sample 原理grid_sample是深度学习中常用的图像处理操作之一,其原理是基于空间变换网络(Spatial Transformer Network,简称STN)的一种操作。
STN是一种能够自动学习图像几何变换的网络模块,而grid_sample则是STN的核心组成部分,用于实现对输入图像进行采样的功能。
我们来了解一下STN的原理。
STN的目标是通过学习一个空间变换的函数,使得输入图像能够更好地适应模型的需求。
在STN中,空间变换分为两个步骤:定位网络(Localization Network)和网格生成器(Grid Generator)。
定位网络用于学习输入图像中感兴趣区域的位置参数,而网格生成器则根据这些位置参数生成采样网格。
最后,grid_sample操作根据采样网格对输入图像进行采样,得到经过空间变换后的图像。
具体来说,定位网络的输入是原始图像,经过一系列卷积和全连接层后,输出一个6维向量,用于表示空间变换的参数。
这6维向量包括平移、旋转和缩放等变换参数。
通过学习这些参数,模型能够自动发现图像中的感兴趣区域并进行相应的变换。
而网格生成器则根据定位网络输出的参数,生成一个采样网格。
采样网格是一个二维矩阵,其中每个元素对应输入图像中的一个像素点,通过对每个像素点进行插值操作,可以得到输出图像中对应位置的像素值。
接下来,我们详细介绍一下grid_sample操作的原理。
grid_sample操作的输入包括两个部分:输入图像和采样网格。
输入图像是一个四维张量,包括批次数、通道数、高度和宽度四个维度。
而采样网格是一个三维张量,包括批次数、高度和宽度三个维度。
grid_sample操作的输出也是一个四维张量,与输入图像具有相同的形状。
输出的每个像素点的值是通过对输入图像的插值操作得到的。
grid_sample操作的实现过程如下:首先,对于输出图像中的每个像素点,根据其在输出图像中的位置,通过采样网格找到对应的输入图像中的位置。
图像处理_CMU SRI Motion Image Dataset(CMU SRI运动图像数据集)

CMU SRI Motion Image Dataset(CMU SRI运动图像数据集)数据摘要:Taken with the Sony camera (borrowed from Stan Reifel) with the 12.5mm lens and the IR filter from the Fairchild head (which Bill took out for other reasons). The Sony camera has several advantages over the GE and the Fairchild.中文关键词:图像,索尼相机,通用电气,灵敏度,镜头,英文关键词:image,Sony camera,GE,sensitivity,lens,数据格式:IMAGE数据用途:图像处理,摄影技术数据详细介绍:SRI Motion Image DatasetTaken with the Sony camera (borrowed from Stan Reifel) with the 12.5mm lens and the IR filter from the Fairchild head (which Bill took out for other reasons). The Sony camera has several advantages over the GE and the Fairchild. It is inexpensive ($1000.). It appears to have none of the patterning I've seen in both the others (4 row and 4 column-type of "mesh" over the image). It has much better sensitivity than the Fairchild (I could barely see anything with the same lens and filter on the Fairchild.) It appears to have good blooming characteristics. The sunlight and flourescents don't cause it to bloom like the Fairchild.I took CAL0.IMG and CAL20.IMG via USR:[BOLLES]CALCAM.ICP, which takes one picture, moves the table 20" back from the target, and takes the second one.Using the formula of March 28 (page 3) I computed the following pixel sizes:1 horizontal pixel = .001170018"1 vertical pixel = .001089928"which would make the 256x240 (sampled down from 512x480) image plane to be.2995"(h) x .2616"(v). The specs say that the sensitive area on the chipis 8.8mm x 6.6mm or .3477" x .2596". I don't understand the differencein the horizontal sizes.Using this formula the two image plane distances corresponding to 30" onthe target were .1602925" and .1689388", which I believe should be the same, if the optics is symmetric, which it is. I don't know why there issuch a difference. (Maybe poor pointing accuracy of the cursor on the images ... only to the closest pixel.)I then used the 90" tape measured distance from the lens center to thetarget to get another estimate of the image plane distances. For a 30" target, the image plane distance should be 1/3 of F, which is .492126,which is .164042". Since that is a compromise between the two estimates from the first method I decided to use it and recompute the pixel sizes.The new sizes are:1 horizontal pixel = .001197387"1 vertical pixel = .001058336"However, this still does not account for the larger horizontal chip dimension. In pixels, 30" corresponds to 175 horizontal pixels and 201 vertical. If the aspect ratio is 4:3 so that 512 horiz pixels covers4 and 512 vert pixels covers 3, then one would think that the ratiowould be more like 150 H pixels and 200 V pixels for 30".These pixel sizes imply a field of view of 34.6 degrees H by 28.9 degrees V. Notice that the images were actually taken by shifting the table RIGHT.To correct for this their names will be redone sometime so that theyreally go right to left, which will confuse people if the clock canbe read ... It'll go backwards, Oh, well. See the ICP macro file SEQUENCE.ICP which was used to take the sequence ... it contains the cropping and resampling instructions ... basically 512x480 out of 512x512 and then sampled down to 256x240.The camera, instead of being horizontal, was tilted down slightly. We measured the tilt to be 7/32" over 2 & 5/8" which corresponds to an angleof 4.763642 degrees. At .001058336"/pixel this is an image plane distance of .0410105" or 38.75 pixels (out of 240 V pixels). Thus, the focusof expansion for AHTABLE pictures would be at (128,158) (starting with (0,0) vs (1,1)). To check this I took a horizontal picture (HORIZNTL.IMG) and marked the piercing point (256,240) in it and located that pointin AHTAB125.IMG. It was at (128,160), which agrees quite well with the number mentioned above. I then computed the angle that would place the focus of expansion at (128,160), which is 4.916568 degrees. I'll usethat as the pitch angle.Horizontal distances (vs. distances along the axis of the camera, whichis pointing down slightly) to some of the objects in the scene are:21.0 -- closest leg of the ladder21.5 -- the tip of the leaf at the top of the last image27.5 -- closest leaf at the bottom of the last image39.0 -- far leg of the ladder40.5 -- closest (upper left) corner of the shirt64.5 -- post near the middle of the picture68.0 -- lower left corner of the tilted wood backing for a light68.5 -- string holding the lead weight72.5 -- closest corner of the small box on the table72.5 -- label on the motor75.5 -- top right corner of tilted wood backing board79.0 -- closest side of the small conveyorbelt80.0 -- diagonal brace for the post (from top center to the left)91.5 -- top of the small vertical leaf of vertical plant on left95.5 -- pot holding that plant119.5 - the group of wires dropping down to the back of the terminals122.5 - upper right, closest corner of the keyboard100.0 - upper left corner on the back of the terminal148.5 - front of pot at the far end of the terminal table208.0 - front leg of the chair on the left224.5 - the back of the chair on the left277.0 - rightmost left of the cart, in the distance285.5 - leftmost pt on the black shade of the standing photo light295.5 - left visible left of the cart318.5 - left front side of the black cabinet on the right368.5 - far side of the tall cabinets on the left472.5 - front of the shelfs against the back wall491.5 - the clockThese distances were measured with a tape measure ... originally fromthe vise holding the camera and then subtracting 3.5" to the lens center.数据预览:点此下载完整数据集。
Single image motion deblurring using transparency

2. Previous Work
With unknown linear shift-invariant PSF [5], early approaches usually assume a priori knowledge to estimate the blur filter in deblurring the input image. In [2], with the defined parametric model, the values of the unknown parameters are estimated by inspecting the zero patterns in the Fourier transformation. The approaches proposed in [11, 12] model a blurred image as an autoregressive moving average (ARMA) process. The blur filter estimation is transformed to a problem of estimating the parameters of the ARMA process. Many methods solve the image deblurring using generalized cross-validation or maximum likelihood (ML) estimation. Expectation maximization (EM) is commonly adopted to maximize the log-likelihood of the parameter set. Kim et al. [9] restore the out-of-focus blurred image by estimating the filter in a parametric form. In [10, 19], recursive inverse filtering methods (RIF) are proposed to iteratively solve the image restoration problem. Extensive surveys on blind deconvolution can be found in [13, 6]. Recently, Fergus et al. [4] propose a variational Bayesian approach using an assumption on the statistical property of the image gradient distribution to approximate the unblurred image. An ensemble learning algorithm is employed which is originally proposed in [18] to solve the image separation problem. This method is proven effective in deblurring natural images and estimating complex blur filters. Image deblurring systems are also developed using hardware or multiple images to obtain more object structure and motion information in restoring degraded images. In [1], a high-resolution still image camera and a low-resolution video camera are connected where the low-resolution video camera is used to estimate the PSF. In [16], using fast im-
最新毕业设计-移动机器人的视觉的图像处理分析方法研究

毕业设计-移动机器人的视觉的图像处理分析方法研究移动机器人研究中的机器视觉研究正在兴起。
图像处理的丰富内容不仅提出了挑战,也为研究者提供了广阔的研究平台。
本文从移动机器人视觉系统入手,首先介绍了移动机器人视觉系统的概况和技术原理。
然后,依次阐述了移动机器人单目系统、双目系统和全景系统的基本原理,并举例说明了基于这三种视觉系统的图像处理方法。
其中,基于单目视觉的移动机器人SLAM方法结合CCD摄像机和里程计实现SLAM。
为了提高定位精度,避免错误定位的发生,在里程表定位的基础上,对不同视觉图像提取的特征进行匹配,根据极坐标几何计算摄像机的旋转角度,得到摄像机和里程表的角度冗余信息。
采用扩展卡尔曼滤波器(EKF)融合信息,提高了SLAM的鲁棒性。
针对基于双目视觉的移动机器人,针对立体视觉算法复杂度、且计算耗时的问题,提出了一种实时立体视觉系统的嵌入式实现方案,构建了一个以高性能多媒体数字信号处理器芯片TMS320DM642为核心的双通道视频采集系统。
使用高性能的数字信号处理器芯片可以满足实时性的要求,并且摆脱了以前由PC机实现的环境限制,如计算速度慢、功耗大等缺点。
为了解决室外机器人高精度定位问题,可以设计一种基于全景视觉近红外光源照度、全景视觉观测和手动编码路标的室外机器人定位系统。
该系统利用近红外成像减少光照和阴影的影响,利用全景视觉获取大范围的环境信息,依靠图像处理算法识别路标,最后利用三角测量算法完成机器人定位。
移动机器人在机器视觉方面的研究正在兴起,丰富的图像处理内容不仅给研究者带来了挑战,也为他们提供了一个广阔的平台这文本以机器人视觉系统.开始首先,介绍了移动机器人视觉系统的概况和技术原理然后描述了单目移动机器人系统、双目移动机器人系统和三眼移动机器人系统.的基本原理和它基于三个视觉系统.指定这些图像处理方法其中其中,基于单目视觉移动机器人的SLAM方法是CCD摄像机和里程计.的组合到提高定位精度,避免位置误差的发生,在里程表位置.的基础上,根据视觉图像的不同视角匹配各种特征我们可以根据极线几何计算摄像机旋转角度,利用里程计获取摄像机角度的冗余信息,并利用扩展卡尔曼滤波器(EKF).进行信息融合因此,这可以增强SLAM.的鲁棒性为基于双目视觉的移动机器人,立体视觉算法复杂,耗时等.我们可以通过嵌入系统.来呈现实时立体视觉计划它采用高性能多媒体芯片TMS320DM642作为双通道视频采集系统.这高性能DSP芯片.满足实时要求这方法摆脱了以往PC机的环境限制、计算速度慢、功耗大等缺点.为对于高精度室外机器人定位问题的要求,可以设计一个基于近红外光源照明、全景视觉观察和手动编码.的室外机器人定位系统这系统减少了近红外光图像对光线和阴影的影响,通过全景视觉系统获取大范围的环境信息,通过图像处理算法识别路标,并通过三角测量算法完成机器人的最终位置.介绍视觉是人类获取信息的最丰富的手段。
计算机视觉中的背景建模与运动目标检测技术
计算机视觉中的背景建模与运动目标检测技术计算机视觉是人工智能领域的一个重要分支,旨在使计算机具备理解和处理图像的能力。
在计算机视觉中,背景建模和运动目标检测是两个关键问题,它们能够帮助计算机自动识别图像中的目标物体和运动变化。
背景建模是指通过分析图像序列中的像素值,提取出背景信息并建立背景模型,从而实现对背景和前景的区分。
它是许多计算机视觉任务的基础,如运动目标检测、行人跟踪和视频分析等。
背景建模的关键问题是如何在不同光照条件下准确地估计背景模型,以便更好地检测运动目标。
传统的背景建模方法主要基于统计学模型,如高斯混合模型(GMM)和自适应背景平均(ABM)。
高斯混合模型假设每个像素的像素值是由一个或多个高斯分布组合而成,而自适应背景平均方法则通过对每个像素的像素值进行平均来建模。
然而,这些方法对于复杂场景的处理效果有限,比如光照变化、场景动态等。
近年来,随着深度学习的快速发展,基于深度学习的背景建模方法逐渐成为研究的热点。
深度学习模型能够自动提取图像的特征,并具有较强的非线性建模能力,可以更好地适应不同场景的复杂性。
例如,基于卷积神经网络(CNN)的背景建模方法,可以学习到图像的空间、时间和频率等多维特征,从而提高建模的准确性。
运动目标检测是计算机视觉中另一个重要的任务,它旨在自动检测和跟踪图像序列中的运动目标。
运动目标检测可以广泛应用于视频监控、交通流量统计、智能驾驶等领域。
基于背景建模的运动目标检测方法可以分为两类:基于像素的方法和基于区域的方法。
基于像素的方法主要通过将前景和背景进行像素级别的比较来实现目标的检测。
这类方法对光照变化和复杂背景的适应性较强,但对于噪声、遮挡和长时间运动等情况的处理效果较差。
相比之下,基于区域的方法则将图像分割成多个区域,并对每个区域进行运动目标的检测。
这类方法不仅可以提高检测的准确性,还可以减少计算量,但对于背景的变化较敏感。
随着计算机硬件的不断增强和图像处理算法的不断改进,背景建模和运动目标检测技术在实际应用中取得了令人瞩目的成果。
【CN110246094A】一种用于彩色图像超分辨率重建的6维嵌入的去噪自编码先验信息算法【专利】
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910391958.0(22)申请日 2019.05.13(71)申请人 南昌大学地址 330000 江西省南昌市红谷滩新区学府大道999号(72)发明人 刘且根 周瑾洁 何卓楠 袁媛 张凤芹 王玉皞 (74)专利代理机构 北京众合诚成知识产权代理有限公司 11246代理人 袁红梅(51)Int.Cl.G06T 5/00(2006.01)G06N 3/04(2006.01)(54)发明名称一种用于彩色图像超分辨率重建的6维嵌入的去噪自编码先验信息算法(57)摘要本发明提供了一种用于彩色图像超分辨率重建的6维嵌入的去噪自编码先验信息算法,包括以下步骤,步骤A:利用去噪自动编码(DAE)作为彩色图像超分辨率重建的先验信息手段,通过复制3个信道,建立6维嵌入去噪自编码先验算法模型;步骤B:训练一个以6维变量为输入的去噪网络,然后利用网络驱动的高维先验阵嵌入的先验信息对彩色图像进行超分辨率重建;步骤C:迭代恢复阶段,将中间色图像映射为6维图像,利用网络进行处理,平均值运算符用于将其转换回三通道图像。
本发明高维先验算法解决了基本数据元陷入局部最优解的问题,有效地克服了不稳定性。
该算法具有良好的性能和良好的视觉检测性能。
权利要求书2页 说明书5页 附图2页CN 110246094 A 2019.09.17C N 110246094A1.一种用于彩色图像超分辨率重建的6维嵌入的去噪自编码先验信息算法,其特征在于:包括以下步骤:步骤A:利用去噪自动编码(DAE)作为彩色图像超分辨率重建的先验信息手段,通过复制3个信道,建立6维嵌入去噪自编码先验算法模型;步骤B:训练一个以6维变量为输入的去噪网络,然后利用网络驱动的高维先验阵嵌入的先验信息对彩色图像进行超分辨率重建;步骤C:迭代恢复阶段,将中间色图像映射为6维图像,利用网络进行处理,平均值运算符用于将其转换回三通道图像。
图像处理_CMU Backyard Motion Image Dataset(CMU 后院场景运动图像数据集)

CMU Backyard Motion Image Dataset(CMU 后院场景运动图像数据集)数据摘要:The images were recorded on a umatic broadcast tape, and correspond to the even frames between time code 3:31:20 and 3:54:14 (about 23 seconds). They were taken with a hand-held Sony camcorder under overcast sky. Transferred to tape with a Sony BVU-920 videocassette player and a VIP matrox digitizer and frame buffer.中文关键词:运动,后院,校正器,移位,数字处理系统,英文关键词:motion,backyard,transfer,Digital Processing Systems,corrector,数据格式:IMAGE数据用途:图像处理,图像运动控制数据详细介绍:Backyard Motion Image DatasetDescriptionThe images were recorded on a umatic broadcast tape, and correspond to the even frames between time code 3:31:20 and 3:54:14 (about 23 seconds). They were taken with a hand-held Sony camcorder under overcast sky. Transferred to tape with a Sony BVU-920 videocassette player and a VIP matrox digitizer and frame buffer. A Digital Processing Systems timebase corrector was used during the transfer. Note that some images are obviously out of sequence, and probably many more.数据预览:点此下载完整数据集。
OpenCV计算机视觉实战指南

OpenCV计算机视觉实战指南第一章:介绍OpenCV和计算机视觉OpenCV(Open Source Computer Vision)是一个开源的计算机视觉库,广泛用于计算机视觉、图像处理和模式识别等领域。
本章将介绍OpenCV的概述和应用领域,以及计算机视觉的基本概念和应用。
1.1 OpenCV的背景和发展历程- OpenCV的起源和目标- OpenCV的主要版本和发展历程1.2 计算机视觉的基本概念和应用- 图像处理与计算机视觉的关系- 计算机视觉的主要任务和应用场景第二章:OpenCV的安装和使用本章将介绍如何安装OpenCV库和配置开发环境,并给出一些基本的示例代码,展示OpenCV库的使用。
2.1 安装OpenCV库- 下载和安装OpenCV库- 配置开发环境(IDE、编译器等)2.2 OpenCV库的基本使用- 创建和读取图像- 图像的基本操作(缩放、旋转、平移等)- 图像的滤波和增强第三章:图像处理与分析本章将重点介绍图像处理和分析的基本技术和方法,包括图像滤波、边缘检测、图像分割等。
3.1 图像滤波- 平滑滤波(均值滤波、高斯滤波等)- 锐化滤波(拉普拉斯滤波、边缘增强滤波等)3.2 边缘检测- Sobel算子- Canny边缘检测算法3.3 图像分割- 基于阈值的分割方法- 基于边缘的分割方法第四章:特征提取与描述本章将介绍特征提取和描述的主要方法,包括Harris角点检测、SIFT特征等,并以示例代码展示其在实际应用中的使用。
4.1 Harris角点检测- 角点检测的原理和应用- Harris角点检测算法的实现与示例4.2 SIFT特征- SIFT特征的原理和特点- SIFT特征的提取与匹配第五章:目标检测与识别本章将介绍目标检测和识别的主要方法和技术,包括Haar特征、深度学习等,并展示其在实际场景中的应用。
5.1 Haar特征- Haar特征的原理和提取方法- 基于Haar特征的目标检测与识别5.2 深度学习在目标检测中的应用- 卷积神经网络(CNN)的介绍- 基于CNN的目标检测算法(如YOLO、Faster R-CNN)第六章:图像拼接与重建本章将介绍图像拼接和重建的基本方法和技术,包括图像融合、全景图像拼接等,并给出实例代码。
基于视觉传达效果的图像压缩感知重建算法研究

文章编号:1007-757X(2021)04-0061-05基于视觉传达效果的图像压缩感知重建算法研究沈凤仙(三江学院计算机科学与工程学院,江苏南京210000)摘要:针对传统的图像压缩感知重建算法的视觉传达效果不好、成像质量低0缺4,将图像分块理论D入压缩感知图像重建,结合曲波变换具有适合表达边缘细节信息和曲线信息的优4,利用曲波变换对MRI图像进行稀疏表示,形成一种基于视觉传达效果的MRI图像压缩感知图像重构算法#选择信噪比、相对"误差和匹配度为评价m标,通过无噪图像、加噪图像、不同采样频率对重构图像质量影响进行3组实验#实验结果表明,图像重构时,在信噪比、相对"误差和匹配度3个评价m 标上,提出的算法GPBDCT均优于SIDCT和PBDCT,同时GPBDCT具有很强的抵抗噪声的能力,在保持图像细节和边缘方面效果很好#关键词:小波变换;曲波变换;压缩感知;正则化参数;采样频率;信噪比中图分类号:TN911.73文献标志码:AStudy on Image Compression Perceptual ReconstructionAlgorithm Based on Visual Communication EffectSHEN Fengxian(School of Computer Science and Engineering,Sanjiang University,Nanjing210000,China)Abstract:Aiming at the shortcomings of traditional image compression perceptual reconstruction algorithm,such as bad visual communicatione f ectandlowimagequality,thetheoryofimageblockisappliedintothereconstructionofcompressedpercep-ualimagesTCombiningtheadvantagesofcurvelettransform,whichissuitableforexpressingedgedetailsandcurveinforma-ion,the MRIimagesarerepresentedsparinglybycurvelettransformTAn MRIimagereconstructionalgorithmbasedonvisual communication effect is proposed.The signal-to-noise ratio,relative—error and matching degree are selected as the evaluation indexes.The results of three groups of experiments show that the quality of reconstructed images is affected by noise-free images,noisy images and different sampling frequencies and PBDCT is superior to SIDCT and PBDCT in SNR,relative—error and matching degree.PBDCT has strong ability to resist noise and is good at preserving image details and edges.Key words:wavelet transform;curvelet transform;compression perception;regularization parameter;sampling frequency%SNR0引言磁共振成像(Magnetic Resonance Imaging,MRI)技术能够提供活体组织的细节图像,同时具有对人体无辐射性伤害等优点,因此被广泛地应用于人脑、胸部、心脏以及人体其他部位结构的成像。
最新第五章图像预处理精编版

2020年第五章图像预处理精编版第五章图像预处理一般情况下,成像系统获取的图像(即原始图像)由于受到种种条件限制和随机干扰,往往不能在视觉系统中直接使用,必须在视觉的早期阶段对原始图像进行灰度校正、噪声过滤等图像预处理.对机器视觉系统来说,所用的图像预处理方法并不考虑图像降质原因,只将图像中感兴趣的特征有选择地突出,衰减其不需要的特征,故预处理后的输出图像并不需要去逼近原图像.这类图像预处理方法统称为图像增强.图像增强技术主要有两种方法:空间域法和频率域法.空间域方法主要是在空间域内对图像象素直接运算处理.频率域方法就是在图像的某种变换域对图像的变换值进行运算,如先对图像进行傅里叶变换,再对图像的频谱进行某种计算(如滤波等),最后将计算后的图像逆变换到空间域.本章首先讨论直方图修正方法,然后介绍各种滤波技术,其中对高斯平滑滤波器将作比较深入的讨论。
5.1直方图修正许多图像的灰度值是非均匀分布的,其中灰度值集中在一个小区间内的图像是很常见的(图5.2(a)所示的对比度很弱的图像).直方图均衡化是一种通过重新均匀地分布各灰度值来增强图像对比度的方法.经过直方图均衡化的图像对二值化阈值选取十分有利. 一般来说,直方图修正能提高图像的主观质量,因此在处理艺术图像时非常有用。
直方图修正的一个简单例子是图像尺度变换:把在灰度区间[a,b]内的象素点映射到[z1,z2]区间.一般情况下,由于曝光不充分,原始图像灰度区间[a,b]常为空间[z1,z2]的子空间,此时,将原区间内的象素点z映射成新区间内象素点z’的函数表示为上述函数的曲线形状见图5.1(a).上述映射关系实际上将[a,b]区间扩展到区间[z1,z2]上,使曝光不充分的图像黑的更黑,白的更白。
如果图像的大多数象素灰度值分布在区间[a, b],则可以使用图5.1(b)所示的映射函数若要突出图像中具有某些灰度值物体的细节,而又不牺牲其它灰度上的细节,可以采用分段灰度变换,使需要的细节灰度值区间得到拉伸,不需要的细节得到压缩,以增强对比度,如图5.1(c)所示.当然也可以采用连续平滑函数进行灰度变换,见图5.1(d).这一方法存在的问题是,当直方图被延伸后,所得到的新直方图并不均匀,也就是说,各灰度值所对应的象素数并不相等.因此,更好的方法应该是既能扩展直方图,又能使直方图真正地呈现均匀性。
openvins解读 -回复

openvins解读-回复【openvins解读】是一种三维视觉定位与建图系统,它通过融合了视觉信息和惯性传感器数据来实现精准的位置估计和环境建图。
本文将详细介绍openvins的原理和实现步骤。
openvins(Open-Source Visual-Inertial State Estimator)是一个开放源代码的视觉惯性状态估计器。
它是一个将来自相机和惯性传感器的数据融合在一起的系统,以实现高精度的定位和建图。
openvins基于视觉和惯性数据的融合,通过计算相机位姿、地图重建和状态估计来实现对机器人的感知和导航能力的增强。
openvins系统的核心是视觉惯性传感器,该传感器由相机和惯性测量单元(IMU)组成。
相机用于采集环境的图像信息,而IMU则测量机器人的线性加速度和角速度。
通过融合相机和IMU的数据,openvins可以实现高度准确的位姿估计,并且不会因为相机视野的限制而受影响。
openvins的实现过程可以分为以下几个步骤:1. 图像预处理:在将图像输入openvins之前,需要进行图像预处理。
这包括图像去畸变和特征提取。
图像去畸变是为了校正图像的形变,使得图像中的特征点位置更加准确。
特征提取是为了提取图像中的关键点和描述子,以用于后续的特征匹配和三维重建。
2. 视觉特征匹配:在这一步中,openvins将使用特征点和描述子来匹配两幅图像之间的对应关系。
通过匹配图像中的特征点,可以计算出相机之间的相对位姿变化。
3. 视觉惯性融合:openvins通过融合视觉和惯性数据来估计机器人的位姿。
这一步骤主要包括视觉惯性初始化、视觉惯性状态传播和视觉惯性优化。
视觉惯性初始化是通过运动估计算法,利用视觉和惯性数据初始化并获取相机的初始位姿。
视觉惯性状态传播是通过IMU的数据来预测相机的位姿变化。
视觉惯性优化是通过最小化重投影误差来优化相机位姿,并且优化过程是迭代进行的,每次迭代都会将视觉和惯性数据进行融合。
opencv实现measure_pos算法原理

opencv实现measure_pos算法原理Opencv(Open Source Computer Vision)是一个开源的计算机视觉库,可用于图像和视频处理。
其中一个重要的应用领域是测量物体在图像或视频中的位置,也被称为测距(measure_pos)算法。
本文将详细介绍Opencv实现测距算法的原理,并逐步回答相关问题。
第一步:图像预处理在开始测距之前,需要进行图像预处理,以便更好地提取物体的特征并减少噪声的影响。
这个预处理步骤包括以下几个方面:1. 去噪:由于图像中常常存在噪声,使用滤波器(如高斯滤波器)对图像进行平滑处理,可以有效减少噪声的影响。
2. 图像灰度化:将图像从RGB格式转换为灰度图像,这样可以简化后续的图像处理步骤,并减少计算量。
3. 图像平滑:使用不同的平滑算法(如中值滤波器)进一步减少噪声。
这些预处理步骤可以通过Opencv提供的函数实现,例如“cv2.GaussianBlur”和“cv2.cvtColor”。
第二步:物体检测与特征提取在对图像进行预处理之后,需要检测并提取物体在图像中的特征,以便进行测距。
有许多物体检测和特征提取方法可供选择,例如边缘检测、角点检测和特征描述子。
1. 边缘检测:使用边缘检测算法(如Canny边缘检测)可以检测到物体的边缘,然后通过对边缘进行处理,如滤波和二值化,可以更好地提取物体的位置信息。
2. 角点检测:角点是一种具有明显变化的像素点,对于物体的定位和测量非常有用。
常用的角点检测算法包括Harris角点检测和Shi-Tomasi角点检测。
3. 特征描述子:在检测到物体的角点之后,可以使用特征描述子(如SIFT、SURF、ORB等)对每个角点进行描述。
这些描述子可以用于比较不同图像中的特征,进而进行物体匹配和测量。
Opencv提供了丰富的函数库来实现这些物体检测和特征提取方法,如“cv2.Canny”和“cv2.goodFeaturesToTrack”。
maki's lab讲义
maki's lab讲义Maki's Lab 讲义:影像识别=================================1. 简介Maki's Lab 是一家专注于影像识别技术研究与应用的实验室。
本讲义旨在介绍影像识别领域的基本概念、常见算法以及应用案例。
通过阅读本讲义,您将了解到影像识别的基本原理、常用算法以及如何应用这些算法解决现实世界的问题。
2. 影像识别的基础知识2.1 像素2.2 色彩空间2.3 图像特征提取2.4 图像分类与识别3. 常见的影像识别算法3.1 特征提取算法3.1.1 尺度不变特征变换 (Scale-invariant feature transform, SIFT) 3.1.2 高斯滤波器 (Gaussian filter)3.2 分类算法3.2.1 支持向量机 (Support Vector Machine, SVM)3.2.2 卷积神经网络 (Convolutional Neural Network, CNN)3.2.3 集成学习算法 (Ensemble learning)4. 影像识别应用案例4.1 道路标志识别4.2 人脸识别4.3 医学影像诊断4.4 视频监控5. 影像识别的挑战与发展趋势5.1 大规模数据集5.2 硬件加速5.3 深度学习技术5.4 可解释性与隐私保护6. 结语本讲义介绍了影像识别的基础知识、常见算法以及应用案例。
影像识别作为计算机视觉领域的重要研究方向,有着广阔的应用前景和研究价值。
希望通过本讲义的学习,能够使读者对影像识别有一个初步的了解,并能够将影像识别技术应用到实际问题中。
欢迎读者在实践中不断探索和创新,推动影像识别技术的发展。
数字图像处理——图像空余增强实验源代码及实验报告
试验一一, 实验目的上机实验是为训练学生的实际程序设计能力安排的、包含在教学课时内的教学内容。
实验目的是:1 , 进一步深入理解相关部分的基本概念和授课内容。
2, 进一步提高实际动手进行程序设计的能力。
二,实验要求(1), 熟悉Matlab软件、编程以及图像处理工具箱。
掌握Matlab的操作界面和基本操作流程掌握m文件的使用掌握Matlab关于图像的读入、输出的处理函数,比如:imread、imshow、figure、Subplot、imwrite、colormap(2), 利用图像处理工具箱进行空域图像增强实验利用Matlab的图像处理工具箱中提供的函数进行“点运算”利用Matlab的图像处理工具箱中提供的函数进行“算术运算”灰度切割、分段线性变换、位图切割:需要进行Matlab编程图像平均减少噪声:需要进行Matlab编程要求至少实现5个(包括5个)以上的,在课程中讲过的图像空域增强方法。
三,程序设计基本思想Matlab关于图像的读入,输出的处理函数以及matlab图像处理工具箱里的函数可在matlab中能直接调用,多做几个试验就能熟练掌握运用这几个函数;后面的需要用matlab编程来实现数字图像处理功能的试验需自己编写源程序,做完以上两个部分,这个试验就完成了。
四,原理概述a)学会调用matlab图像处理工具箱的函数,这个可以在matlab中直接试验。
b)第二部分,要求用matlab编程工具来实现图像的灰度切割,位图切割等功能。
(1),灰度切割的原理:灰度切割实际上是分段函数线性变换的一种处理方法,他所要实现的主要功能是变幻某一段灰度值的灰度值(将之变亮或变暗或根据要求做其他方面的变幻),编写源程序时只需提出带改变部分的灰度值,对其进行符合要求的变化即可。
(2),位图切割的原理:位图切割同样是分段线性变换的一种,不同的是文图切割中把一幅图像“分个八层”,每层都含有原图的部分信息,编写源代码时,可以去提出或除某一位图,显示出代表的信息。
cub数据集的处理 -回复

cub数据集的处理-回复cub 数据集是一个被广泛使用于计算机视觉领域的图像数据集。
它是为了鸟类识别任务而创建的,其中包含了200种鸟类的图像样本。
在本篇文章中,我们将深入探讨cub 数据集的处理过程,包括数据收集与提取、数据预处理、数据增强和数据分割等步骤。
首先,我们需要收集与提取cub 数据集。
这个过程通常涉及到网站爬取和图像集合的筛选。
在互联网上,我们可以找到很多鸟类图像的数据库,例如Cornell 客观记录实验室的"Birds of North America" 网站等。
我们可以使用网络爬虫来自动下载这些图像,并将它们存储在适当的目录结构中。
接下来,我们需要进行数据预处理。
这个步骤的目的是将原始图像转化为模型可以处理的格式。
常见的预处理操作包括调整图像大小、裁剪、归一化和灰度化等。
其中,调整图像大小是很重要的一步,因为我们需要确保所有的图像具有相同的尺寸,以便于后续的输入。
在预处理完成后,我们可以进行数据增强操作。
数据增强是指利用现有的图像生成新的样本,以扩充训练数据集的规模,提高模型的泛化能力。
常见的数据增强操作包括镜像翻转、旋转、平移、缩放和亮度调整等。
这些操作可以通过图像处理库如OpenCV 来实现。
数据增强完成后,我们需要将数据集划分为训练集和测试集。
这是为了评估模型在未见过的样本上的表现。
通常情况下,我们将数据集划分为训练集和测试集的比例为80:20 或70:30。
可以通过脚本或库函数来完成这个步骤。
在数据集划分完成后,我们可以开始使用它们来训练模型。
训练模型的具体步骤会根据具体的算法和框架而有所差异,但通常包括模型构建、参数初始化、损失函数定义、优化器选择和训练循环等。
完成模型训练后,我们需要评估模型在测试集上的表现。
常见的评估指标包括准确率、精确率、召回率和F1 分数等。
可以使用混淆矩阵来统计模型的预测结果,比较预测结果和真实标签之间的差异。
最后,在模型训练和评估完成后,我们可以使用它来进行鸟类识别任务了。