ABB机器人4600
最新ABB机器人简介

ABB机器人的组成IRB型机器人是著名的瑞典机器人生厂商ABB公司的产品,IRB指ABB 标准系列机器人。
IRB机器人常用于焊接、涂刷、搬运与切割。
常用的型号有:IRB 1400,IRB 2400,IRB 4400,IRB 6400。
其型号的解释如下:IRB指的是ABB机器人。
第一位数(1,2,4,6)指机器人的大小。
第二位数(4)指的是属于S4或S4C系统。
无论是何种型号,机器人控制部分基本相同。
IR 1400:承载较小,最大承载为5kg,常用于焊接。
IRB 2400:承载较小,最大承载为 7kg ,常用于焊接。
IRB 4400:承载较大,最大承载为60kg 常用于搬运或大范围焊接。
IRB 6400:承载较大,最大承载为200kg,常用于搬运或大范围焊接。
ABB机器人的组成:ABB机器人是由两部分组成:机械手和控制器。
操作人员通过控制器操作机械人。
机械手是由六个转轴组成的空间6杆开链机构,理论上可以达到运动范围内的任何一点,表列举了各轴的转动范围,图展示了机械手臂的工作空间,图展示了六个运动轴的名称及运动方式。
每个转轴均带有一个齿轮箱,机械手运动精度可达到±0.05mm~±0.2mm。
六个转轴均有AC伺服电机驱动。
机械手带有一块串口测量板(SMB),它将编码器模拟量装换为数字量,并依靠刘杰可充电镍铬电池供电,机器人关机时,通过电池存储机器人当前编码器位置,一旦电池电量不足需要及时更换。
第i轴1 2 3 4 5 6角度范围180~180-110~100-60~65-200~200-120~120-400~400-ABB机器人的控制器如下图所示:控制器系统主要由主计算机板、机器人计算机板、快速硬盘、网络通信计算机、示教器、驱动单元、通信单元和电力版组成。
变压器、主计算机、轴计算机、驱动板、串口测量和编码器组成伺服驱动系统,对位置、速度和电机电流进行数字化调整,对电机叫了控制进行同步。
面向ABB IRB4600机器人的虚拟示教系统研究

b
P A N J u n — h a o ,Z HU O Y o n g ,HO U L i a n g ,B U X i a n g — j i a n
( S c h o o l ( 1 f A e r o s p a c e E n g i n e e r i n g.Xi a me n U n i v e r s i t y ,Xi a me n 3 6 1 0 0 5,Ch i n a)
第3 4卷第 1 2期
2 ( 1 1 7年 l 2月
V‘ ) 1 . 3 4 NO .1 2 I ) e t .2 01 7
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1— 4 5 5 1 . 2 0 1 7 . 1 2 . 0 0 5
Ab s t r a c t : Mmi n g a t e x i s t i n g
“ ) l e n l s o f v i r t u a l r o b o t t e a c l i r n g ,l i k e l mv — r e a l i t y( ) f s ( ‘ e n e ,p o o r mx i b i l i t y a n d S t ) 0 1 1 .、 i r t u a l t e a e i i f n g w a s
术
了其正逆运动学 的求解 。参j { 《 { 真实示教器 , 进行 _ r虚拟示教器的开 发 : 利用 正! J ! I J 表达式 没汁了 R A P I D湃言解 释器 , 埘机器人 的运 动 轨迹进子 J . r 规划 , 刷于运动指 令的解析 。以真实机器人车间 为例 , 进 行 了虚拟永教场 景的搭 建 研究结果 表I : 所 外发的机器 人
机器人水切割技术

机器人水切割的机器人本体最新一代的ABB4600机器人,该机器人具有做优化的设计,良好的防水功能,适合水切割环境使用,整体机身美观漂亮,运行稳定,反应速度快,生产率提高20%,每个旋转关节设计合理,节省空间,旋转角度大,满足更复杂的切割路径。
机器人水切割精度ABB IRB4600精度在同类别里面良好,而且速度更快,故障率低,用于水切割项目切割精度完全可以达到要求,整体设计现代化,运行震动很小,切割的废品率低,在编程方面进行优化设计,编程简单精准,当先的程序出现可以进行升级操作,是目前机器人水切割工作站的首选。
机器人水切割产能ABB IRB4600机器人具有更快的速度,配合超高的压力,切割速度将会提升20%,相对产品率可以提升25%,特别是机器人的空运行速度,速度得到极大的提升,经过现场实验,比如轿车的汽车脚垫水切割,日产量可以达到300-500件,24H不间断工作也成为了项目的标准。
机器人水切割有效切割范围ABB IRB4600机器人具有更大的切割范围,各种辅助设计和重心点的设计,让机器人可以具备更大的倾斜和更大的臂展,安装方式可以落地式,倾斜式,倒置式,目前更多的是落地式安装,因为ABB4600机器人切割范围足够大,经济型安装方式就是落地式安装,大部分的机器人水切割项目也是落地式结构,操作简单,工期短,安装方便,更重要的是性价比高,是客户的首选。
机器人水切割占地面积ABB IRB4600机器人具有更小的占地面积,机器人本体可以用苗条来形容,使用最新的合金本体,增加强度的同时可以减小体积,旋转关节处的紧凑型设计,这样的好处是减轻了重量,更有利于机器人水切割速度,另一方面机器人水切割配备的高压盘管也相对较短,节省成本。
机器人水切割的密封性机器人水切割的特点就是使用水来切割,大家都知道,水具有良好的导电性能,水可以让很多地方产生故障,那么机器人水切割的防水性将会很重要,ABB IRB4600机器人的防水等级达到IP67防护等级,机器人本体具有抗腐蚀性涂层,在每个安装接口处涂抹防水溶胶,活动关键处有防水密封,部分结构使用不锈钢材质,防止腐蚀,这些措施将有效避免生锈,渗水等问题。
ABB机器人4600

IRB4600-40∕2.55工业机器人●手腕持重:40 kg●最大臂展半径: 2.55m●轴数:6轴●重复定位精度:0.05mm(多台机器人测试综合平均值)●机器人版本:标准版●防护等级: IP67●轴运动:轴动作范围最大速度1 回转+180︒至-180︒ 175︒/s2 立臂+ 150︒至 -90︒ 175︒/s3 横臂+ 75︒至-180︒ 175︒/s4 腕 +400︒至-400︒ 250︒/s5 腕摆+120︒至-125︒ 250︒/s6 腕传+400︒至-400︒ 360︒/s●电源: 200-600V, 50-60Hz●机器人高度: 1922mm●机器人尺寸:底座:676X512 mm●机器人重量: 412-435 kg●环境温度: 5︒C- 52︒C●最大湿度: 95%●最大噪音: 75dB(A)ABB机器人系统·平均无故障工作时间>80000小时,运行稳定可靠;·结构合理,电机功率小,比其他品牌能耗低30%以上;·模块化结构,维护、检修方便快捷;·动态自优化运动控制技术令各轴总是以最大加速度运行,运行速度提高25%;·6轴智能防碰撞技术将碰撞力减小到30%,且可快速恢复;·6.7寸全彩触摸屏式示教器,操作方便快捷;·控制系统与机器人本体匹配,具有中/英文操作界面;·机器人作业半径满足最大工件需求;·开放的I/O 接口16 个,USB 接口2 个,便于程序备份;·我司作为ABB最佳合作伙伴,得到ABB公司最有力的技术支持。
ABB 机器人IRB4600本体电气图纸

The information in this document is subject to change without notice and should not be construed as a commitment by ABB. ABB assumes no responsibility for any errors that may appear in this document.
R1.MP R1.SMB
R1.G R1.SMB1.7 R2.FB7 R2.SMB R1.SMB1-2 R1.SMB3-6 X8 X9 X10
R1.CP/CS R1.CBUS
Lab/Office:
DMRO SE/ PRMP
IRB 4600 Connection point location
Status: 2016-05-03
Latest revision: ECO 80624, WI 106464
Page 10: Connection R1.MP:13 to X8:2 added.
Prepared by, date: Erik Mesaros Approved by, date: JanErik Nåhls
Lab/Office:
In no event shall ABB be liable for incidental or consequential damages arising from use of this document.
This document and parts thereof must not be reproduced or copied without ABB's written permission, and contents therof must not be imparted to a third party nor be used for any unauthorized purpose. Contravention will be prosecuted.
IRB 4600-40-ABB机器人资料

1 Description
7
1.1 Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.1.1 Introduction to Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.1.2 Different robot versions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Safety/Standards. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.2.1 Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 1.2.2 Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
ABB机器人控制器概述

局限性:成本高、编程复杂
未来发展方向:人工智能、物 联网等技术的融合
展望:更加智能、高效、可靠 的机器人控制器
ABB机器人控制器的使用与维 护
控制器的安装与调试
控制器安装环境要求:温度、湿度、防尘等 控制器硬件连接:电缆、接口等 控制器软件安装与配置:操作系统、驱动程序等 控制器调试步骤:基本功能测试、性能测试等
控制器的操作与编程
编程语言:使用RAPID编程 语言进行机器人控制程序的 编写
控制器启动与关闭:按照正 确顺序启动控制器,避免对 机器人造成损坏
示教器使用:通过示教器进 行手动控制、编程和调试
控制器参数设置:根据实际 需求设置控制器参数,确保
机器人正常运行
控制器的维护与保养
定期检查:确 保控制器正常 运行,及时发
控制器工作流程
控制器启动:机 器人控制器在启 动时进行自检, 确保正常运行
输入信号处理: 控制器接收来自 各种传感器的信 号,并进行处理
运动规划:控制 器根据输入信号 和预设程序,计 算出机器人所需 执行的精确运动 轨迹
输出信号控制: 控制器将计算出 的运动轨迹转换 为控制信号,驱 动机器人执行相 应的动作
高性能:采用先进的微处理器技术,实现高速、高精度控制。 可靠性:经过严格的质量控制和耐久性测试,确保长期稳定运行。 灵活性:支持多种编程语言和通讯协议,方便与各种设备进行集成。 易用性:提供友好的人机界面和丰富的编程示例,降低使用难度。
ABB机器人控制器的工作原 理
控制器结构
控制器硬件:由微处理器、输入输出模块、通信模块等组成 控制器软件:运行控制算法、运动规划、任务调度等 控制器接口:与机器人本体、传感器等连接,实现信息交互 控制器安全:具备过载保护、急停等安全功能
IRB 4600工业机器人

IRB4600工业机器人全新锋芒一代IRB4600工业机器人携增强、创新功能率先问世。
该机型采用优化设计,对目标应用具备出众的适应能力。
纤巧的机身使生产单元布置更紧凑,实现产能与质量双提升,推动生产效率迈上新台阶。
精度至高IRB4600工业机器人的精度为同类产品之最,其操作速度更快,废品率更低,在扩大产能、提升效率方面,将起到举足轻重的作用,尤其适合切削、点胶、机加工、测量、装配及焊接应用。
此外,该机器人采用“所编即所得”的编程机制,尽可能缩短了编程时间和周期时间。
在任何应用场合下,当新程序或新产品上线时,上述编程性能均有助于最大限度加快调试过程、缩短停线时间。
周期至短IRB4600工业机器人采用创新的优化设计,机身紧凑轻巧,加速度达到同类最高,结合其超快的运行速度,所获周期时间与行业标准相比最短可缩减25%。
操作中,机器人在避绕障碍物和跟踪路径时,可始终保持最高加速度,从而提高产能与效率。
范围超大IRB4600工业机器人超大的工作范围,能实现到达距离、周期时间、辅助设备等诸方面的综合优化。
该机器人可灵活采用落地、斜置、半支架、倒置等安装方式,为模拟最佳工艺布局提供了极大便利。
机身纤巧IRB4600工业机器人占地面积小、轴1转座半径短、轴3后方肘部纤细、上下臂小巧、手腕紧凑,这些特点使其成为同类产品中最“苗条”的一款机器人。
在规划生产单元的布局时,IRB4600可以与机械设备靠得更近,从而缩小整个工作站的占地面积,提高单位面积产量,推升工作效率。
防护周密ABB产品防护计划之周全居业内领先水平,此次更进一步强化了IRB4600的防护保障措施。
Foundry Plus 系统达到IP67防护等级标准,还包括涂覆抗腐蚀涂层,采用防锈安装法兰,机器人后部固定电缆防熔融金属飞溅,底脚地板电缆接口加设护盖等一系列措施。
随需应变性能优异的IRBP变位机、IRBT轨迹运动系统和电机系列产品,从各方面增强了IRB4600对目标应用的适应能力。
ABB机器人4600

ABB4600ABB4600一、产品概述ABB4600是一款先进的工业,具有高精度、高效能的特点。
该适用于多种应用领域,包括制造业、物流和航空航天等。
它采用了先进的控制系统和传感器技术,能够实现高速、精确的操作。
二、技术规格1.尺寸:该的尺寸为,具有紧凑的设计,适用于空间有限的工作环境。
2.负载能力:ABB4600具有高负载能力,可以承载最大的重量。
3.运动范围:该具有灵活的运动范围,可以实现多轴运动,并能够达到的最大速度。
4.控制系统:ABB4600采用了先进的控制系统,具有快速响应和精确控制的特点。
5.传感器技术:该配备了先进的传感器技术,能够实现精确的物体识别和定位。
三、应用领域1.制造业:ABB4600在制造业领域具有广泛应用,可用于组装、焊接、喷涂等工艺。
2.物流:该可以用于物流领域的自动化操作,包括搬运、装卸和包装等任务。
3.航空航天:ABB4600在航空航天领域具有重要的应用,包括飞机组件制造和维护等方面。
四、安全性能1.安全措施:ABB4600配备了多种安全措施,包括防碰撞装置和紧急停机按钮等。
2.安全培训:为了保证操作人员的安全,使用ABB4600的操作人员应接受相关的培训。
五、维护保养1.定期检查:为了保持ABB4600的正常运行,需要定期进行机械和电气系统的检查。
2.零部件更换:在运行过程中,可能需要更换一些磨损的零部件,应按照相关指引进行更换。
六、附件本文档涉及的附件包括:1.ABB4600产品手册2.ABB4600安装指南3.ABB4600维修手册七、法律名词及注释本文涉及的法律名词及注释如下:1.法律名词1:解释12.法律名词2:解释2。
ABB 4600浊度仪说明书

4600 Series AnalyzersAll ModelsUser Guide –Modbus Communication SupplementIM/4600–MOD_5ABBThe CompanyWe are an established world force in the design and manufacture of instrumentation for industrial process control, flow measurement, gas and liquid analysis and environmental applications.As a part of ABB, a world leader in process automation technology, we offer customers application expertise, service and support worldwide.We are committed to teamwork, high quality manufacturing, advanced technology and unrivalled service and support.The quality, accuracy and performance of the Company’s products result from over 100 years experience, combined with a continuous program of innovative design and development to incorporate the latest technology.The UKAS Calibration Laboratory No. 0255 is just one of the ten flow calibration plants operated by the Company and is indicative of our dedication to quality and accuracy.Health and SafetyTo ensure that our products are safe and without risk to health, the following points must be noted:1.The relevant sections of these instructions must be read carefully before proceeding.2.Warning labels on containers and packages must be observed.3.Installation, operation, maintenance and servicing must only be carried out by suitably trained personnel and in accordance with the information given.4.Normal safety precautions must be taken to avoid the possibility of an accident occurring when operating in conditions of high pressure and/or temperature.5.Chemicals must be stored away from heat, protected from temperature extremes and powders kept dry. Normal safe handling procedures must be used.6.When disposing of chemicals ensure that no two chemicals are mixed.Safety advice concerning the use of the equipment described in this manual or any relevant hazard data sheets (where applicable) may be obtained from the Company address on the back cover, together with servicing and spares information.EN ISO 9001:2000Cert. No. Q 05907EN 29001 (ISO 9001)Lenno, Italy – Cert. No. 9/90AStonehouse, U.K.Electrical SafetyThis instrument complies with the requirements of BS EN 61010-1:1993 "Safety Requirements for Electrical Equipment for Measurement, Control and Laboratory Use". If the instrument is used in a manner NOT specified by the Company, the protection provided by the instrument may be impaired.SymbolsOne or more of the following symbols may appear on the instrument labelling:Information in this manual is intended only to assist our customers in the efficient operation of our equipment. Use of this manual for any other purpose is specifically prohibited and its contents are not to be reproduced in full or part without prior approval of the Technical Publications Department.CONTENTSSection Page 1INTRODUCTION (2)1.1Electrical Connection (2)1.2Protocol (2)2PREPARATION (2)2.1Company Standard Settings (2)3INSTALLATION (3)3.1Serial Communication Adaptorsfor Personal Computers (3)3.1.1Five-wire Configuration (3)3.1.2Three-wire Configuration (3)4ELECTRICAL CONNECTIONS (3)4.1Serial Connections (3)4.1.1Five-wire Cable (3)4.1.2Three-wire Cable (3)5SETTING UP (5)5.1Termination Resistors (5)6PROGRAMMING (6)6.1Serial Interface Page (6)7MODBUS PROTOCOL (7)7.1Introduction to Modbus Protocol(RTU only) (7)7.2Modbus Function Codes (7)8MODBUS FUNCTIONS (8)8.1Read Coil Status– Function Code 01 (8)8.1.1Read Coil Status Query (8)8.1.2Read Coil Status Response (8)8.2Read Holding Register– Function Code 03 (8)8.2.1Read Holding Register Query (8)8.2.2Read Holding Register Response (9)8.3Force Single Coil– Function Code 05 (9)8.3.1Force Single Coil Query (9)8.3.2Force Single Coil Response (9)8.4Preset Single Register– Function Code 06 (10)8.4.1Preset Single Register Query (10)8.4.2Preset Single Register Response (10)8.5Loopback Test– Function Code 08 (11)8.5.1Loopback Test Query (11)8.5.2Loopback Test Response (11)8.6Preset Multiple Registers– Function Code 16 (11)8.6.1Preset MultipleRegisters Query (11)8.6.2Preset MultipleRegisters Response..........................11Section Page 9EXCEPTION RESPONSES (12)9.1Examples (12)10MODBUS COILS AND REGISTERS (12)10.1Conductivity TransmittersModels 4620/25 (12)10.1.1Coils (12)10.1.2Holding Registers (13)10.2Conductivity Transmitters Multi-electrodeVersions Models 4621/26 (14)10.2.1Coils (14)10.2.2Holding Registers (14)10.3Conductivity Transmitters to meet USPRegulations Models 4623/28 (15)10.3.1Coils (15)10.3.2Holding Registers (15)10.4pH TransmittersModels 4630/35 and 4631/36 (16)10.4.1Coils (16)10.4.2Holding Registers (17)10.5Dissolved Oxygen AnalyzersModels 4640/45 and 4642/47 (18)10.5.1Coils (18)10.5.2Holding Registers (18)10.6Low Level Dissolved Oxygen AnalyzersModels 4641/46 (19)10.6.1Coils (19)10.6.2Holding Registers (19)10.7Turbidity AnalyzersModels 4670 and 4675 (20)10.7.1Coils (20)10.7.2Holding Registers (20)10.8Biocide Cleaning Control (4691) (21)10.8.1Coils (21)10.8.2Holding Registers (21)11OPERATION (22)12SPECIFICATION (24)APPENDICES (24)A1Non-volatile Memory Limitations (24)11INTRODUCTION2PREPARATIONThis manual must be read in conjunction with the appropriate Operating Instructions, depending on the instrument type:•Models 4620, 4621, 4625 & 4626Conductivity Transmitters–IM/4600–CON •Models 4623 & 4628 ConductivityTransmitters to meet USP 23–IM/4600–USP•Models 4630 & 4635pH Monitors–IM/4630–PH•Models 4640 & 4645Dissolved Oxygen Monitors–IM/4600–DO•Models 4670 & 4675Turbidity Monitors–IM/4670For repeatable and reliable serial communication to take place between a master (host computer) and slaves (instruments) it is essential that the two conditions detailed in this section are met.1.1Electrical ConnectionA standard method of electrical connection is used between the master and the slaves, with defined voltage levels and characteristics. The transmitter and receiver integrated circuits within the 4600 meet the requirements of the EIA (Electronic Industries Association, American) RS485 and RS422 Serial Interface Standards.The RS422/485 communication standard is used with the following logic levels:a)for logic '1' (MARK condition or IDLE state) the 'A'terminal of the transmitter is negative (0V) withrespect to the 'B' terminal (+5V)b)for logic '0' (SPACE condition or ACTIVE state) the 'A'terminal of the transmitter is positive (+5V) withrespect to the 'B' terminal (0V).Note. The 'A' terminal is Tx + or Rx + and the 'B' terminal is Tx – or Rx –.1.2ProtocolA standard language or protocol must be used in both the master and the slaves for messages (commands and data) to be interpreted and acted upon. To achieve this second condition, Modbus Protocol is utilized on the 4600 Series Monitor using the Remote Terminal Unit (RTU) mode only. Two methods of message error checking are used. Parity checking is used, if selected, to detect transmission errors in individual characters.Parity is used for simple error checking. The parity bit is a one-bit code which is transmitted in addition to the ASCII character. It can detect only one error per character, since two errors may cancel out. Parity is calculated by finding the sum of logic '1's in the character and either:a)setting the parity bit to logic '1' if the sum is odd, or logic'0' if the sum is even, when using even parity.orb)setting the parity bit to logic '0' if the sum is odd, or logic'1' if the sum is even, when using odd parity.Cyclic Redundancy Checking (CRC-16) is used to detect errors in the Master messages and Slave responses. This therefore detects errors in the complete message sent and also the replies.Preparation is as given in the Operating Instructions – see Section 1, with additions as detailed in this section. 2.1Company Standard SettingsOnly those parameters detailed on the customer order are programmed at the factory. If any parameters are unsuitable for the application they can be reprogrammed – see Section 7 of the Operating Instructions. Serial data programming details are given in Section 7 of this manual.Standard parameter settings for the serial data programme are as follows:Instrument Identity01Parity noneTransmission Rate9600 baud.233INSTALLATION4ELECTRICAL CONNECTIONSObserve the limitations outlined in the Operating Instructions –see Section 1. The maximum serial data transmission line length for both RS422 and RS485 systems is 1200m.3.1Serial CommunicationAdaptors for Personal ComputersAn RS422/485 communications adaptor board is required for serial links. It is strongly recommended that the card used has galvanic isolation to protect the computer from lightning damage and increase immunity from noise pick-up from cables.3.1.1Five-wire ConfigurationThe following OPTO22 boards are recommended for use with the 4600 serial instruments:Part puterTypeAC24XT Bus IBM PC compatible AC24 AT AT Bus IBM PC compatible AC34Microchannel IBM PC.The following 'jumper' selections are required on OPTO22boards (usually supplied as the default configuration):RX & TX install line termination jumperInstall pull-up and pull-down jumpers CTS & RTSdisable jumper installed.Select board address and interrupts as described in the OPTO22 manual.3.1.2Three-wire ConfigurationThe adaptor card must have the provision for disabling the transmitter after each message is transmitted, so that bus contention does not occur. This is often implemented by the use of the RTS signal to control the transmitter enable. Consult the adaptor card manufacturer to determine suitability.Caution.Install the pull-up/pull-down resistors on either the RX or TX lines. The resistors must not be connected on both pairs of lines.All connections, apart from those for serial data communication, are made as shown in Figs. 4.3 and 4.4 of the Operating Instructions – see Section 1.4.1Serial Connections – Figs. 4.1 and 4.2The transmitters must be connected in parallel as shown in the schematic diagram – Fig. 4.1. The RS485 standard quotes connection of maximum thirty two slaves (4600 Transmitters)to any single driver (computer terminal or host computer); the RS422 standard quotes connection of up to ten slaves.However, these numbers can be increased if the driver's serial port permits.Make serial data connections and check the processor board links as shown in Fig. 4.2. The type of cable used is dependent on the transmission speed and cable length:4.1.1Five-wire Cable (refer also to Fig. 11.1)Up to 6m (all speeds) – standard screened or twisted paircable.Up to 300m – twin twisted pair with overall foil screen and anintegral drain wire, e.g. Belden 9502 or equivalentUp to 1200m – twin twisted pair with separate foil screensand integral drain wires for each pair, e.g. Belden 9729 or equivalent4.1.2Three-wire Cable (refer also to Fig. 11.2)Up to 6m (all speeds) – standard screened or twisted paircable.Up to 1200m – single twisted pair with overall foil screenand integral drain wire, e.g. Belden 9501 or equivalent.…4ELECTRICAL CONNECTIONS …4.1Serial Connections455SETTING UPT ermination ResistorsINT ermination Resistors OUTIC22IC23IC25IC24121112Processor Board121112121112For all aspects other than serial data transmission the transmitter is set up as shown in the Operating Instructions – see Section 1. Unless otherwise requested, the instrument is despatched with a transmission rate of 9600 baud and transmission line termination resistors linked-out. If the resistors are to be linked-in (see Fig. 5.1) carry out the following section.5.1Termination Resistors – Fig. 5.1For long transmission lines, termination resistors are required on the last 4600 Transmitter in the chain and at the host computer/computer terminal. Under normal operating conditions the resistors are required at the last 4600 receive inputs only – see Fig. 4.1. The transmitter's resistors are selected using plug-in links – see Fig. 5.1.Switch off the supply and gain access to the processor board (Section 4 in the Operating Instructions). Set the termination resistor links as shown in Fig. 5.1.Fig. 5.1 Termination Resistor Links66PROGRAMMINGThe general programming procedure is as detailed in the Operating Instructions but with an additional Serial Interface page between the Set Up Outputs and Electrical Cal pages.6.1Serial Interface PagePage Header – Serial InterfaceTransmission RateSelect the retransmission rate required (1200 slowest, 9600 fastest).Transmitter IdentificationAssign the transmitter an identification number (1 to 99) – see Section 4.1. The identification number allows more than one transmitter to be accessed via the communication channel.ParitySelect the appropriate parity to match the computer terminal or host computer.Return to the top of the Serial Interface Pageor advance to the next page.77MODBUS PROTOCOLs u b d o M ed o C n o i t c n u Fe m a N e g a s s e M s u b d o M no i t i n i f e D s u b d o M 006410su t a t S l i o C d a e R 0064e h T .t n i o p c i f i c e p s a m o r f s t n i o p )n a e l o o b (e t e r c s i d e v i t u c e s n o c 61o t p u d a e R r o f t s e u q e r y n a *s K A N d n a a t a d d e n i f e d n i a t n o c t o n o d h c i h w s t n i o p r o f s o r e z s n r u t e r .001t a h t r e t a e r g s r e b m u n t n i o p 30re t s i g e R g n i d l o H d a e R s o r e z s n r u t e r 0064e h T .r e t s i g e r g n i t r a t s c if i c e p s a m o r f s r e t s ig e r e v i t u c e s n o c 8o t p U r e t s i g e r r o f t s e u q e r y n a s K A N d n a a t a d d e n i f e d n i a t n o c t o n o dh ci h w s r e t s i g e r m o r f .001n a h t r e t a e r g s r e b m u n 50l i o C e l g n i S e c r o F y l t n e r r u c t o n s i t n i o p e h t f i s i h t s K A N 0064e h T .t n i o p )n a e l o o b (e t e r c s i d e n o e t i r W .e l b a e t i r w 60r e t s i g e R e l g n i S t e s e r P n o i t c n uf s i h T .e l b a e t i r w y l t n e r r u c t o n s i r e t s ig e r eh t fi s K A N 0064e h T .r e t s i g e r e n o e t i r W .e s a b a t a d e h t n i e g a r o t s e r o f e b r e t s i g e r e h t o t s t i m i l g n i t s i x e y n a s e i l p p a o s l a e d o c 80t s e T c i t s o n g a i D k c a b p o o L .d e t r o p p u s s i 'y r e u Q f o n r u t e R 'y l n o ,e g a s s e m e h t o h c E 61sr e t s i g e R e l p i t l u M t e s e r P f i s K A N 0064e h T .r e t s i g e r g n i t r a t s d e i f i c e p s a m o r f s r e t s i g e r e v i t u c e s n o c 8o t p u e t i r W e r a h c i h w s e t i r w e h t l l a t u o s e i r r a c l l i t s t u b ,e l b a e t i r w y l t n e r r u c t o n e r a s r e t s i g e r e h t f o y n a .e s a b a t a d e h t n i e g a r o t s e r of e b e u l a v e h t o t s t i m i l e l b a c i l p p a y l t n e r r u c y n ag n i y l p p a ,d i l a v tn e m e g d e l w o n k c A e v i t a g e N =K A N *7.1Introduction to Modbus Protocol (RTU only)Modbus communication is based on a master and a slave arrangement. The master sends a message to one slave at a time and waits for a reply.The slave cannot accept a new message until the existing message is processed and a reply sent to the master (maximum response time 250 milliseconds). The slave monitors the elapsed time between receipt of characters. If the elapsed time without a new character is 31/2 character times, the slave assumes the next character received is the start of a new message.To allow the master to differentiate between more than one slave in a system, each slave is given a unique identity address (between 1 and 99).A broadcast address (address zero) can be used to access all slave devices with one command. This is limited to write messages only and there is no slave acknowledgment.Note. Modbus RTU requires 1 start bit, 8 data bits, 1 parity bit (optional) and 1 or 2 stop bits. The 4600 uses only 1 stop bit.7.2Modbus Function Codes – Table 7.1The function code field instructs the addressed slaves which function to perform.Table 7.1 Modbus Function Codes88MODBUS FUNCTIONSThis section shows typical examples of Modbus function codes 01, 03, 05, 06, 08 and 16.8.1Read Coil Status – Function Code 018.1.1Read Coil Status QueryThis function allows the user to obtain the ON/OFF status of logic coils used to control discrete outputs from the addressed slave only. Broadcast mode is not supported with this function code. In addition to the slave address and function fields, the message requires that the information field contain the initial coil offset address to be read (starting address) and the number of locations to be interrogated must obtain status data.Note.The coil offset address is the coil number minus one, e.g. to start at coil 31 the data start value must be set to 30 (1EH).Example – a read coil status request to read 7 coils from slave (01) starting at coil 11 (Alarm 1 Relay State) is shown below.8.1.2Read Coil Status ResponseThe data is packed one bit for each coil (1 = ON, 0 = OFF). The response includes the slave address, function code, quantity of data characters, the data characters and error checking. The low order bit of the first character contains the first addressed coil and the remainder follow. For coil quantities that are not even multiples of eight, the last characters are filled in with zeros at high order end.Example – the response to the read coil status query shows the following:Relay alarm state 1 OFF Relay alarm state 2 OFF No coil at this address Channel 1 input error Channel 2 input error No coil at this address NV check sum error8.2Read Holding Register – Function Code 038.2.1Read Holding Register QueryThe Read holding registers allow the user to obtain the binary contents of holding registers in the addressed slave.Note.The data start register must contain the offset address of the first register to be accessed, e.g. to start at register 11the data start register must contain 10 (0AH).Broadcast mode is not allowed.Example – a read holding register request to read 6 holding registers from slave (01) starting at holding address 121 (alarm trip A1) is shown below.s s e r d d A no i t c n u F t r a t S l i o C hg i H t e s f f O t r a t S l i o C wo L t e s f f O f o r e b m u N hg i H s l i o C f o r e b m u N wo L s l i o C )61-C R C (d l e i F k c e h C r o r r E 101000A00070D5AC s s e r d d A no i t c n u F t r a t S r e t s i g e R hg i H t e s f f O t r a t S r e t s i g e R wo L t e s f f O f o r e b m u N a t a D hg i H s r e t s i g e R f o r e b m u N a t a D wo L s r e t s i g e R )61-C R C (d l e i F k c e h C r o r r E 103000A000401C AC s s e r d d A no i t c n u F tn u o C e t y B su t a t S l i o C a t a D 81o t 11)61-C R C (d l e i F k c e h C r o r r E 101010300D 948MODBUS FUNCTIONS …8.2.2Read Holding Register ResponseThe addressed slave responds with its address and function code, followed by the information field. The information field contains 1 byte describing the quantity of data bytes to be returned. The contents of each register requested (DATA) is two bytes, the first byte includes the high order bits and the second the low order bits.Example – the response to the read holding register query shows the following:Measured conductivity –60.0µS/cm (Range: 0 to 100µS/cm)Conductivity set point 1–80.0µS/cm Conductivity set point 2–20.0µS/cm Measured temperature –49°C (Range: –10 to 110°C)8.3Force Single Coil – Function Code 058.3.1Force Single Coil QueryThis message forces a single coil either ON or OFF . The data value 65,280 (FF00 HEX) sets the coil ON and the value zero turns it OFF . All other values are illegal and do not affect the coil.Note.To write to a coil the coil offset address must be used, e.g. to write to coil 50, the coil address 49(31H) is transmitted.The use of slave address zero (broadcast mode) forces all attached slaves to modify the desired coil.Example – a force single coil request to switch ON coil address 50 (NV Memory Save) in slave 01 is shown below.8.3.2Force Single Coil ResponseThe response is confirmation of the query after the coil state has been altered.Example :s s e r d d A n o i t c n u F tn u o C e t y B gn i d l o H 11r e t s i g e R g n i d l o H 21r e t s i g e R g n i d l o H 31r e t s i g e R g n i d l o H 41r e t s i g e R dl e i F k c e h C r o r r E )61-C R C (hg i H w o L h g i H w o L h g i H w o L h g i H w o L 1030809099C0CC 3033701E C09F s s e r d d A no i t c n u F t e s f f O l i o C hg i H te sf f O l i o C wo L e u l a V a t a D hg i H eu l a V a t a D wo L )61-C R C (d l e i F k c e h C r o r r E 10500013FF 00DD 5F s s e r d d A no i t c n u F t e s f f O l i o C hg i H te sf f O l i o C wo L e u l a V a t a D hg i H eu l a V a t a D wo L )61-C R C (d l e i F k c e h C r o r r E 10500013FF 00DD 5F…8MODBUS FUNCTIONS8.4Preset Single Register – Function Code 068.4.1Preset Single Register QueryThe preset single register allows the user to modify the contents of a holding register.Note.Function codes 5, 6 and 16 are the only messages that are recognized as valid for broadcast.Example – a preset single register request to write the value 60.0 to holding register address 12 (alarm trip A1) in slave 01 is shown below.Since all register values for measured variables and alarm set points (scaled parameters) are ranged to 12 bits (for RTU), then to calculate the Data Value High and Data Value Low for a setpoint of 60.0 the following method is used:Instrument Range =0 to 100.0therefore60.0 x 4095100.0= 245710converted to hexadecimal 245710 = 099916thereforeData Value High = 09Data Value Low = 99Note.To write to a register, the register's offset address must be used, e.g. to write to register 12, the offset address 11(0B)is transmitted.8.4.2Preset Single Register ResponseThe normal response to a preset single register request is to retransmit the query message after the register has been altered.Example :s s e r d d A no i t c n u F r e t s i g e R hg i H t e s f f O r e t s i g e R wo L t e s f f O hg i H e u l a V a t a D wo L e u l a V a t a D )61-C R C (d l e i F k c e h C r o r r E 106000B09099E323s s e r d d A no i t c n u F r e t s i g e R hg i H t e s f f O r e t s i g e R wo L t e s f f O hg i H e u l a V a t a D wo L e u l a V a t a D )61-C R C (d l e i F k c e h C r o r r E 106000B09099E3238MODBUS FUNCTIONS8.5Loopback Test – Function Code 088.5.1Loopback Test QueryThe purpose of the loopback test is to test the Modbus system, it does not affect the content of the controller. Variations in the response may indicate faults in the Modbus system. The information field contains 2 bytes for the designation of the diagnostic code followed by 2 bytes to designate the action to be taken.Example:8.5.2Loopback Test ResponseThe response always echoes the query, only diagnostic code 0 (bytes 3 and 4) can be used.Example :8.6Preset Multiple Registers – Function Code 168.6.1Preset Multiple Registers QueryHolding registers existing within the controller can have their contents changed by this message. When used with slave address zero (Broadcast mode) all slave controllers load the selected registers with the contents specified.Note. To write to multiple registers, the initial register offset address must be used, e.g. to write to register 02 onwards, the offset address 01 is transmitted.Example – a preset multiple registers request to write the value 90.0 to the register address (Alarm Set Point 1) and the value 30.0to the register address (Alarm Set Point 2) in slave 01 is shown below.8.6.2Preset Multiple Registers ResponseThe response confirms slave identification, function code, starting register address and quantity only.Example:s s e r d d A no i t c n u F r e t s i g e R hg i H t e s f f O r e t s i g e R wo L t e s f f O hg i H e u l a V a t a D wo L e u l a V a t a D )61-C R C (d l e i F k c e h C r o r r E 108000B09099753F s s e r d d A no i t c n u F c i t s o n g a i D a t a D hg i H e d o C c i t s o n g a i D a t a D wo L e d o C *a t a D *a t a D )61-C R C (d l e i F k c e h C r o r r E 108000B09099753F .e d o m c i t s o n g a i d r of s d l e i f n o i t a m r o f n i e h t e b o t d e r e d i s n o c e r a e s e h T *s s e r d d A no i t c n u F tr a t S r e t s i g e R t e s f f O f o r e b m u N s r e t s i g e R e t y B t n u o C re t s i g e R g n i d l o H 20re t s i g e R g n i d l o H 30dl e i F k c e h C r o r r E )61-C R C (hg i H w o L h g i H w o L h g i H w o L 100100B0002040E05640CC 2A E7s s e r d d A no i t c n u F t r a t S r e t s i g e R hg i H t e s f f O t r a t S r e t s i g e R wo L t e s f f O s r e t s i g e R f o r e b m u N )61-C R C (d l e i F k c e h C r o r r E 100100B0002003A10MODBUS COILS AND REGISTERSre b m u N t u p n I et i r W /d a e R n o i t p i r c s e D y r t n E /e s n o p s e R 110210R R e t a t S y a l e R 1m r a l A e t a t S y a l e R 2m r a l A e l b a s i D =0e l b a n E =1410510710R R R r o r r E t u p n I 1l e n n a h C r o r r E t u p n I 2l e n n a h C ro r r E m u S k c e h C V N .K .O =0r o r r E =1050W/R yr o m e m e l i t a l o v -n o n e h t o t s e t i r w e l b a n E e l b a s i D =0el b a n E =19EXCEPTION RESPONSESn o i t p e c x E e s n o p s e R ed o Ce m a N e s n o p s e R n o i t p e c x E no i t i n i f e D e s n o p s e R n o i t p e c x E 10n o i t c n u F l a g e l l I .t n e m u r t s n i e h t r o f n o i t c a e l b a w o l l a n a t o n s i d e v i e c e r n o i t c n u f e g a s s e m e h T 20s s e r d d A a t a D l a g e l l I .t n e m u r t s n i e h t r o f s s e r d d a e l b a w o l l a n a t o n s i d l e i f a t a d e h t n i e c n e r e f e r s s e r d d a e h T 30eu l a V a t a D l a g e l l I .n o i t a c o l e v a l s d e s s e r d d a e h t n i e l b a w o l l a t o n s i d l e i f a t a d e h t n i d e c n e r e f e r e u l a v e h T 70t n e m e g d e l w o n k c A e v i t a g e N .d e m r o f r e p e b t o n n a c d e t s e u q e r t s u j n o i t c n u f e h T 80ro r r E y t i r a P y r o m e M .d e v i e c e r s r e t c a r a h c e h t f o e r o m r o e n o n i r o r r e n a s e t a c i d n i k c e h c y t i r a P The exception response codes sent by the slave are shown in Table 9.1. When a slave detects one of these errors, it sends a response message to the master consisting of slave address, function code, error code and error check fields.9.1ExamplesA read register request to read holding register address 251 of slave 01 (undefined address for slave, beyond address limit) is shown below.The response is an exception response sighting 'illegal data address'. To indicate that the response is a notification of an error,the most significant bit of the function code is set to 1.Table 9.1 Exception Response Datass e r d d A e v a l S no i t c n u F t e s f f O t r a t S r e t s i g e R s r e t s i g e R f o r e b m u N )61-C R C (d l e i F k c e h C r o r r E h g i H w o L h g i H w o L 103000AF 00605E 9F ss e r d d A e v a l S no i t c n u F ed o C n o i t pe c x E )61-C R C (d l e i F k c e h C r o r r E 1038200C 1F 10.1Conductivity Transmitters Models 4620/2510.1.1Coils。
abb 机械手参数
abb 机械手参数
ABB IRB 460-110/2.4工业机器人的主要参数包括:
1.手腕持重:110kg。
2.最大臂展半径:2.4m。
3.轴数:4轴。
4.位置重复精度:0.2mm。
5.防护等级:IP67。
6.运动范围:各轴的动作范围和最大速度不同,例如,回转轴的动作范围是+165至-165
度,最大速度为145度/秒;立臂轴的动作范围是+85至-40度,最大速度为110度/秒等。
7.机器人重量:925kg。
8.环境温度:0C~45C。
9.最大湿度:95%。
此外,IRB 460-110/2.4工业机器人还包括IRC5控制柜,其控制硬件包括多处理器系统、PCI总线、奔腾CPU和大容量闪存等,控制软件为BaseWare机器人操作系统和强大的RAPID编程语言。
控制柜的尺寸和重量分别为970×725×710mm和150kg,环境温度和湿度分别为5C~45C和95%。
如需了解更多参数,建议咨询ABB官方客服或查找ABB官网。
面向ABB IRB4600机器人的虚拟示教系统研究

面向ABB IRB4600机器人的虚拟示教系统研究潘俊浩;卓勇;侯亮;卜祥建【摘要】针对当前工业机器人示教中,虚拟示教方式存在场景真实度低、灵活性差等问题,对工业机器人的虚拟示教进行了研究,应用虚拟现实技术,提出了一种面向ABB IRB4600系列机器人的虚拟示教设计方法.分析了ABB IRB4600机器人的运动学特性,进行了其正逆运动学的求解.参照真实示教器,进行了虚拟示教器的开发:利用正则表达式设计了RAPID语言解释器,对机器人的运动轨迹进行了规划,用于运动指令的解析.以真实机器人车间为例,进行了虚拟示教场景的搭建.研究结果表明:所开发的机器人虚拟示教系统在一定程度上弥补了当前工业机器人虚拟示教存在的不足,具有较高的灵活性、沉浸感强,用户可以方便地进行机器人的示教.%Aiming at existing problems of virtual robot teaching, like low-reality of scene, poor flexibility and so on, virtual teaching was studied. And a design method of virtual teaching is presented for ABB IRB4600 series robot with Virtual Reality technology. And kinematics characteristics of ABB IRB4600 robot was studied and kinematics problem were solved. With reference of real teaching pendant, the develop-ment of the virtual teaching pendant was carried out. And the interpreter was designed for the RAPID language with the use of regular expres-sion;especially for motion command, the path planning of the robot was studied. And the virtual teaching scene was built in accordance with real robot station. The results indicate that the virtual teaching system in a manner makes up the shortcomings of virtual teaching pendant. There are high-flexibility and strong immersion, and the system can be used to teach industrial robot flexibly and conveniently.【期刊名称】《机电工程》【年(卷),期】2017(034)012【总页数】6页(P1392-1396,1411)【关键词】工业机器人;示教;虚拟现实【作者】潘俊浩;卓勇;侯亮;卜祥建【作者单位】厦门大学航空航天学院,福建厦门361005;厦门大学航空航天学院,福建厦门361005;厦门大学航空航天学院,福建厦门361005;厦门大学航空航天学院,福建厦门361005【正文语种】中文【中图分类】TH128;TP391.7工业机器人是面向工业范围的机器人,一般为多关节机械手或者多自由度的机器设备,集成了机械、电子、控制等技术[1-2]。
ABB机器人维护手册
ABB维护手册
ABB维护手册
1、引言
1.1 目的
本手册旨在提供ABB维护的详细指导,以确保的正常运行和延长其使用寿命。
1.2 适用范围
本手册适用于所有ABB的维护,包括但不限于以下型号:IRB 2600、IRB 4600、IRB 6600等。
2、基本知识
2.1 结构
由机械臂、控制器、传感器和执行机构等组成。
本章将介绍的基本结构和各部件的功能。
2.2 操作
详细介绍的操作步骤和常用功能,包括启动和关闭、控制器操作、示教和运行程序等。
3、维护计划
3.1 维护周期
根据的使用情况和生产环境,制定合理的维护计划,包括定期维护和预防性维护等。
3.2 维护任务
列出维护的具体任务清单,包括清洁、润滑、紧固、替换零部件等。
4、故障排除
4.1 常见故障
介绍常见故障的表现和原因,例如运动误差、传感器故障、控制器故障等。
4.2 故障排除步骤
指导维护人员进行故障排除,包括故障检测、故障分析和故障修复等步骤。
5、安全注意事项
5.1 安全规范
介绍使用过程中的安全注意事项,包括人员保护、环境安全和操作规范等。
5.2 风险评估和风险控制
详细阐述使用过程中的潜在风险,以及相应的风险评估和风险
控制措施。
6、附件
本文档涉及以下附件:
- 操作手册
- 维护记录表
- 零部件替换清单
注释:
1、ABB - ASEA Brown Boveri,瑞典ABB公司的简称。
2、 - 自动化控制系统,用于执行各种工业任务的可编程设备。
ABB工业机器人IRB4600详细备件清单

5 3HAC043166-005
Motor Axis 1 / 1轴马达
6 3HAC043090-003
Reduction Gear RV-155C-127.97/1轴减速机
7 3HAC029032-009
Motor Axis 2 / 2轴马达
8 3HAC044361-002
Reduction Gear RV /2轴减速机
No. Parts No. 序号 备件号
Description(EN/CN) 名称描述(英/中)
机器人控制柜通用备件
1 3HAC039832-001 2 3HAC039834-001 3 3HAC039834-002 4 3HAC039833-001 5 1SFA619550R1051 6 3HAC17317-3 7 3HAC025466-001 8 3HAC029105-001 9 3HAC047184-003 10 3HAC050363-001 11 3HAC024488-001 12 3HAC032586-001 13 3HAC029818-001 14 3HAC024144-001 15 3HAC037015-001 16 3HAC029157-001 17 3HAC026253-001 18 3HAC026254-001 19 3HAC028357-001 20 3HAC025562-001 21 3HAC13389-2 22 3HAC14178-1 23 3HAC025917-001 24 3HAC043383-001
Hale Waihona Puke 9 3HAC043569-004
Motor Axis 3 / 3轴马达
10 3HAC043134-004
Reduction Gear RV-125N-145.61/ 3轴减速机
ABB机器人在轮胎企业三角热贴生产线中的应用

作者简介:顾建(1985-),男,工程师,本科,主要从事轮胎制造企业压延和压出设备的维修工作。
收稿日期:2019-10-12随着工业智能化的推进,机器人在生产型企业中的应用越来越广泛。
在轮胎制造过程中,由于其制品的不一致性、工序的复杂性等因素,机器人在制造过程中应用并不广泛,但人工成本在轮胎制造成本中的占比又越来越大,所以机器换人的创新思路在轮胎制造企业得到了大力推广。
我公司的三角热贴生产线主要用于生产胎圈。
胎圈由缠钢缠布的钢丝圈和三角胶贴合而成。
该线有两个操作岗位,自动贴合后的胎圈从伞盘上取出以及在胎圈小车上的堆垛等均由机器人完成,从而替代了原先人工拾取的操作。
1 IRB4600机器人应用介绍目前我们生产的胎圈重量一般在XXKG 以内,因此我们选用ABB 品牌IRB 4600-60/2.05型机器人,该机器人最大负载为60 kg ,考虑到主要实现搬运的应用场合,所以只选用标准型即可。
该机器人拥有六个旋转轴,类似于人类的手臂,具有很高的自由度,其能够到达的范围在2.05 m 。
在三角热贴生产过程中,机器人的6轴法兰中心会安装一套夹具盘,该夹具盘包含三脚撑盘机构和吸盘机构,其中三脚撑盘机构主要用于夹持钢丝圈和胎圈,吸盘机构主要用于吸附塑料垫圈。
见图1所示。
机器人携带夹具盘,主要用于实现如下三个步序:(1)从钢丝圈小车上取下钢丝圈,并放在贴合伞盘上;(2)从塑料隔垫小车上抓取隔垫放到胎圈小车上;(3)从伞盘上抓取贴合好的胎圈,并放到码垛接ABB 机器人在轮胎企业三角热贴生产线中的应用顾建,赵晓光,张剑,徐健(杭州朝阳橡胶有限公司,浙江 杭州 310018)摘要:为了提高三角热贴的胎圈质量、降低员工劳动强度、减少操作人员,在三角热贴生产线的贴合胎圈工位增加了两台ABB 机器人用于复合后胎圈的收取和摆放。
本文主要介绍了ABB 机器人在该生产线中的应用、机器人的日常维修保养以及常见故障判断。
关键词:ABB ;IRB4600机器人;三角热贴中图分类号:TQ330.4文章编号:1009-797X(2020)11-0027-04文献标识码:B DOI:10.13520/ki.rpte.2020.11.006取装置上。
IRB 4600工业机器人
IRB4600工业机器人全新锋芒一代IRB4600工业机器人携增强、创新功能率先问世。
该机型采用优化设计,对目标应用具备出众的适应能力。
纤巧的机身使生产单元布置更紧凑,实现产能与质量双提升,推动生产效率迈上新台阶。
精度至高IRB4600工业机器人的精度为同类产品之最,其操作速度更快,废品率更低,在扩大产能、提升效率方面,将起到举足轻重的作用,尤其适合切削、点胶、机加工、测量、装配及焊接应用。
此外,该机器人采用“所编即所得”的编程机制,尽可能缩短了编程时间和周期时间。
在任何应用场合下,当新程序或新产品上线时,上述编程性能均有助于最大限度加快调试过程、缩短停线时间。
周期至短IRB4600工业机器人采用创新的优化设计,机身紧凑轻巧,加速度达到同类最高,结合其超快的运行速度,所获周期时间与行业标准相比最短可缩减25%。
操作中,机器人在避绕障碍物和跟踪路径时,可始终保持最高加速度,从而提高产能与效率。
范围超大IRB4600工业机器人超大的工作范围,能实现到达距离、周期时间、辅助设备等诸方面的综合优化。
该机器人可灵活采用落地、斜置、半支架、倒置等安装方式,为模拟最佳工艺布局提供了极大便利。
机身纤巧IRB4600工业机器人占地面积小、轴1转座半径短、轴3后方肘部纤细、上下臂小巧、手腕紧凑,这些特点使其成为同类产品中最“苗条”的一款机器人。
在规划生产单元的布局时,IRB4600可以与机械设备靠得更近,从而缩小整个工作站的占地面积,提高单位面积产量,推升工作效率。
防护周密ABB产品防护计划之周全居业内领先水平,此次更进一步强化了IRB4600的防护保障措施。
Foundry Plus 系统达到IP67防护等级标准,还包括涂覆抗腐蚀涂层,采用防锈安装法兰,机器人后部固定电缆防熔融金属飞溅,底脚地板电缆接口加设护盖等一系列措施。
随需应变性能优异的IRBP变位机、IRBT轨迹运动系统和电机系列产品,从各方面增强了IRB4600对目标应用的适应能力。
IRB 4600-40-ABB机器人资料

IRB 4600-40-ABB机器人资料IRB 4600-40 ABB 机器人资料在当今高度自动化的工业领域,机器人扮演着至关重要的角色。
ABB 作为全球领先的机器人技术供应商,其 IRB 4600-40 机器人以出色的性能和广泛的应用领域备受瞩目。
IRB 4600-40 机器人拥有紧凑的设计和强大的功能。
它的机身结构经过精心优化,能够在有限的空间内灵活运作,这对于空间紧张的生产线来说是一个巨大的优势。
同时,其坚固耐用的构造确保了在恶劣的工业环境中长时间稳定运行。
从性能方面来看,IRB 4600-40 具有高精度和高速度的特点。
这使得它在诸如装配、物料搬运、焊接等操作中表现出色。
其高精度能够保证产品的质量一致性,减少次品率;而高速度则大大提高了生产效率,为企业节省了时间和成本。
在负载能力上,IRB 4600-40 可承受较大的重量,能够处理各种不同规格和重量的工件。
这使得它在面对多样化的生产需求时具有很强的适应性。
无论是轻型零部件的快速搬运,还是重型组件的精确装配,它都能游刃有余地完成任务。
该机器人的运动范围也相当广泛。
它能够在较大的空间内自由伸展,到达各个工作位置,从而实现全方位的操作。
这种广泛的运动范围增加了其工作的灵活性,使得生产线的布局可以更加优化和高效。
IRB 4600-40 配备了先进的控制系统。
这个控制系统易于编程和操作,操作人员无需具备深厚的技术背景,经过简单的培训就能上手。
而且,控制系统还支持远程监控和诊断功能,方便技术人员及时发现和解决可能出现的问题,减少停机时间,提高生产的连续性。
在安全性方面,ABB 一直以来都非常重视。
IRB 4600-40 配备了多种安全传感器和防护装置,能够及时感知周围环境的变化,避免与人员或其他设备发生碰撞。
这不仅保障了操作人员的人身安全,也保护了机器人和周边设备的完好。
说到应用领域,IRB 4600-40 可谓是无所不在。
在汽车制造业中,它可以参与车身焊接、零部件组装等工序;在电子行业,它能够精确地进行芯片安装和电路板组装;在物流领域,它能够高效地完成货物搬运和分拣工作。
ABB机器人型号
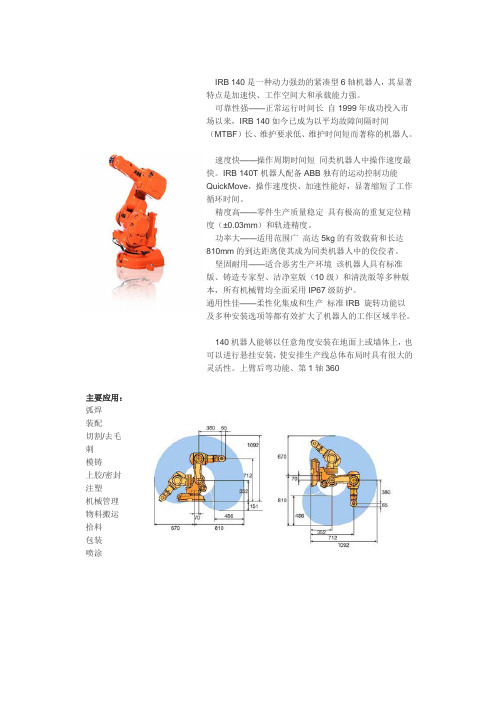
该机器人工作范围大、到达距离长 (最长 1.44 m)。承重能 力为 5 kg,上臂可承受 18 kg 的附加载荷。这在同类机器人中 绝无仅有。
快速配备快速精确的 IRC5 控制器有效缩短了工作周期。
主要应用: 弧焊 上胶 注塑 包装
可靠性强——正常运行时间长该机器人集成熟技术和 经严格测试的创新技术于一身,具有平均故障间隔时间 (MTBF)长、维护要求低、维护时间短等多项优点。
速度快——工作循环时间短同类机器人中操作速度最 快。
精度高——零件生产质量稳定具有极高的重复定位精 度±0.05mm 和轨迹精度。
功率大——适用范围广有效载荷选项为 5kg 或 7kg (“无手腕”时可达 10kg)。 坚固耐用——适合恶劣生 产环境 IP 67 防护等级,可蒸汽清洗,有“铸造专家型” 备选。
IRB 4600 是市场上速度最快,可到达距离最长, 最精确,精简度高,防护等级高的机器人 锋芒一代 为机器人自动化提升生产力
尖端工作站设计 -> 最优化机器人定位精度,有 效使用地面空间因归功于其精密设计,高度灵活的活 动架及突出的可到达性,
尖端产品 -> 周期短、产出高 尖端表现 -> 高精确度、加工组件质量高 …用户 得以最优化生产力,提高生产力解决方案 更灵活的安装方式 更紧凑的工作站 第二代的 QuickMove & TrueMove 能有效缩短高达 20% 的生产周期时间 针对长臂更高的有效载荷 落地式、倾斜式、下探式和倒置式 连续的连接设计概念、平稳简洁的底部设计确保 突出的工作范围 使用机器人作为最优化定位的工具, 缩短周期时 间 提B1600 工业机器人
ABB机械手参数 2

ABB460C机械手介绍设备性能指标及技术参数1.1.1IRB 460-110/2.4•安装方式:地面安装•本体颜色:白色•手腕持重:110 kg•最大臂展半径: 2.4m•轴数:4轴•位置重复精度:0.2mm•防护等级:IP67•运动范围:轴动作范围最大速度1 回转+165︒至-165︒145︒/s2 立臂+ 85︒至 -40︒110︒/s3 横臂+120︒至 -20︒120︒/s6 腕传+300︒至-300︒400︒/s•机器人重量:925kg•环境温度:0︒C~45︒C•最大湿度:95%1.1.2IRC5控制柜•控制硬件:多处理器系统PCI 总线奔腾CPU大容量闪存(256M)20s UPS 备份电源•控制软件:BaseWare 机器人操作系统强大的RAPID编程语言PC-DOS文本格式软件出厂预装,并存于光碟•电源:3相四线 400V(+10%,-15%), 48.5~61.8Hz•额定功率: 13KVA(变压器容量)•控制柜尺寸:970⨯725⨯710 mm•控制柜重量:150kg•环境温度:5︒C- 45︒C•最大湿度:95%•防护等级:IP54•操作面板:控制柜上•编程单元:便携式示教盒,具备操纵杆和键盘彩色触摸式显示具中、英文菜单选项•安全性:紧急停止,自动模式停止,测试模式停止等•输入输出:数字式直流24V输入输出板2机器人在系统中的功能及技术要求2.1卖方按照供货范围提供1台IRB 460-110/2.4型工业机器人裸机,买方提供相关的周边设备,并将机器人与这些设备集成,形成完整的机器人应用系统。
2.2与机器人安装有关的土建参数•地基要求:机器人正常运行负载机器人急停最大负载X,Y轴向力± 6.2KN ± 10.6KNZ轴向力(地面安装) 10 ± 3.8KN 10 ± 6.5KNX,Y轴向力矩± 13.7KNm ± 23KNmZ轴向力矩± 5.3KNm ± 7.9KNm•以上参数不含机器人底座重量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
IRB4600-40∕2.55工业机器人
●手腕持重:40 kg
●最大臂展半径: 2.55m
●轴数:6轴
●重复定位精度:0.05mm(多台机器人测试综合平均值)
●机器人版本:标准版
●防护等级: IP67
●轴运动:
轴动作范围最大速度
1 回转+180︒至-180︒ 175︒/s
2 立臂+ 150︒至 -90︒ 175︒/s
3 横臂+ 75︒至-180︒ 175︒/s
4 腕 +400︒至-400︒ 250︒/s
5 腕摆+120︒至-125︒ 250︒/s
6 腕传+400︒至-400︒ 360︒/s
●电源: 200-600V, 50-60Hz
●机器人高度: 1922mm
●机器人尺寸:底座:676X512 mm
●机器人重量: 412-435 kg
●环境温度: 5︒C- 52︒C
●最大湿度: 95%
●最大噪音: 75dB(A)
ABB机器人系统
·平均无故障工作时间>80000小时,运行稳定可靠;
·结构合理,电机功率小,比其他品牌能耗低30%以上;
·模块化结构,维护、检修方便快捷;
·动态自优化运动控制技术令各轴总是以最大加速度运行,运行速度提高25%;·6轴智能防碰撞技术将碰撞力减小到30%,且可快速恢复;
·6.7寸全彩触摸屏式示教器,操作方便快捷;
·控制系统与机器人本体匹配,具有中/英文操作界面;
·机器人作业半径满足最大工件需求;
·开放的I/O 接口16 个,USB 接口2 个,便于程序备份;
·我司作为ABB最佳合作伙伴,得到ABB公司最有力的技术支持。