基于TMS320LF2407的数据采集与处理系统的设计
基于TMS320LF2407A的最小系统设计
目录摘要 (2)1设计任务及要求 (3)1.1设计任务 (3)1.2设计要求 (3)2系统结构设计 (4)2.1设计原理及框图 (4)2.2设计芯片说明 (4)3硬件设计 (9)3.1电源设计 (9)3.2锁相环电路设计 (9)3.3晶体振荡电路设计 (10)3.4 JTAG电路设计 (10)3.5指示灯电路设计 (11)3.6复位电路设计 (12)3.7 RAM电路设计 (12)3.8 滤波电路设计 (13)4仿真调试过程 (14)5总结 (17)附录一原理图 (19)附录二 PCB图 (20)附录三 PCB剪切图 (21)摘要在人们生活当中,DSP可谓无处不在,例如手机,电视机,数码相机,MP3等等都有DSP的存在。
DSP 已经成为通信、计算机和消费类电子产品等领域的基础器件。
因此,只有理论的学习是不够的,设计一个DSP最小系统,掌握这门重要技术,才能更深刻地理解和掌握DSP,为今后进行高精度、高性能的电子设计打下基础。
DSP 芯片是模拟信号变换成数字信号以后进行高速实时处理的专用微处理器,其处理速度比最快的CPU还快10-50 倍,具有处理速度高、功能强、性能价格比好以及速度功耗比高等特点,被广泛应用于具有实时处理要求的场合。
本次课设的目的是掌握DSP的特点和开发应用技巧,通过具体的电路设计和调试,领会DSP系统的设计要领,从而达到理论到实践的转变,从本质上提高自己的综合能力,以此实现本设计的目的。
此次设计的最小系统主要包括TMS320LF2407A、RAM、电源芯片等。
关键词:DSP系统电路设计电路调试最小系统基于TMS320LF2407A的最小系统设计1设计任务及要求1.1设计任务基于TMS320LF2407A的最小系统:技术数据:设计基于TMS320LF2407A的最小系统,包括电源供电电路、时钟振荡电路、PLL滤波电路、RAM存储器扩展电路、MAX232串行通信电路、IO口驱动发光管电路等。
基于TMS320LF2407 8路·AD采集
基于TMS320LF2407的8路高速A/D并行采集系统王朋1李智1 李精华2许川佩1(1桂林电子工业学院电子工程系桂林 541004)(2桂林航天工业高等专科学校电子工程系 桂林 541004)摘要:本文使用当前普遍采用的TMS320LF2407 DSP作为CPU,对其进行了8路并行A/D 扩展。
并对所选用A/D器件MAX155的性能和工作原理进行了介绍,最后,还给出了该系统硬件结构框图和相应的DSP软件控制程序。
关键词:DSP;串行A/D;并行高速A/D中图分类号:TP368.1 文献标识码:AEight-channel High Speed Simultaneous A/D Sampling System Based on TMS320LF2407Wang peng1 Li Zhi1 LiJingHua2 XuChuanPei1( 1 Dept. of Electronic Eng, Guilin University of Electronic Technology , Guilin 541004, china) (2 Dept. of Electronic Eng., Guilin College of Aerospace Technology,Guilin 541004,China)Abstract:Taking use of the common used TMS320LF2407 DSP as the controlling CPU, this paper sets out the expansion of 8-channel simultaneous high-speed A/D for DSP which integrates a 16-channel serial A/D component. Introducing the performance and operation of A/D converter-MAX155. In the end, the construction diagram of hardware and the controlling software concerning this system are given.Key words: DSP; serial A/D; simultaneous high-speed A/D1引言在计算机检测系统中,由模拟信号到数字信号的转换,是由数据采集系统来完成的。
基于TMS320LF2407A直流电机闭环调速控制系统的设计

王 朕 ,刘 陵顺 ’ 鲁 芳 .唐永红 ,
( . 军航 空 工程 学 院 控 制 工 程 系 , 东 烟 台 2 4 0 ; . 台职 业 学 院 材 料 工程 系 , 东 烟 台 2 4 7 ) 1 海 山 6 0 1 2烟 山 6 6 6
摘 要 :f对 某 型 直 流 电 机 调 速 系 统 的 要 求 , 用 T 3 0 F 4 7 和 AT 9 5 e t 采 MS 2 L 2 O A 8 C l设 计 一 种 双 核 直 流 电 机 闭 环 调 速 控 制
Hale Waihona Puke De i n fco e o p o a i pe d r g l t r o sg o l s d l o r t tng s e e u a o fDC o o m tr b s d o TM ¥ 2 LF2 0 A a e n 3 0 4 7
W ANG Zhe I Li g s n ,LU ng’ n ,L U n —hu Fa ,TANG n — o 2 Yo g h ng
ac c omp ih d b ls e y AT89 . lc ig a o a d r n h o r C51The bo k d a r m fh r wa e a d te prg am ig a o h y t m e in a e p o i e Th da r m fte s se d sg r r v d d. e r s ls o x e i n h w hi o to s se h s a ana e o uik d na c r s n e, i h a c ae o to ,e ltme e u t fe p rme ts o t s c n r l y t m a dv tg f q c y mi e po s h g c ur t c nr l r a —i dip a nd d t t a ee c s ly a a a sorg ,t .
基于TMS320LF2407的材料试验机集成数据采集及控制系统的研制
一
定 ,测试规定 非 比例伸 长应力 、规定残余 应力 、总
伸长应力 以及 屈服点和上 屈服点 时 ,弹性 范围 内的
应 力速率应符 合规定 ,并保 持测试 机 固定 于这一速
C a— a A a pn ̄Y N i -i WA G Y -u n HI o d n I — eg A GX a t n, N aja Y , D , o a (.l tcadEet n f m t nE g er gS ho,inA c icua a dCv nler gIstt 1 e r n l r i I o ai n i ei co lJi rh etr n i l s ei tu , E ci co c n r o n n l t l iE n n n i e
基 于 T S 2 20 M 3 0 4 7的材 料 试 验 机 集 L F 成数据采集及控 制 系统 的研 制
迟 耀 丹 艾 大 鹏 杨 小 天 王 亚 娟 , , ,
(. 1 吉林建筑工程 学院 电气与 电子信 息工程 学院 ,吉林 长春 10 2 ; 30 1
2大陆汽车电子 长春 有限公 司 ,吉林 长春 10 3 3 0 1 C ia h n c u 1 0 2 , h n
2Cni naA t ov hncu o Ld,C aghn 103, hn) .otet u m t e aghnC . t. hncu 303 C ia n l o i C
Ab t c : n e r t d s s m o a a c l cin a d c n r l fmae il e t g ma h n a e in d w i o — s r t A itg ae y t fr d t o l t n o t tr s n c i e w sd s e , h c c n a e e o o o a t i g h
基于TMS320LF2407A的最小系统设计

目录摘要................................................................................................ 错误!未定义书签。
1设计任务及要求......................................................................... 错误!未定义书签。
1.1设计任务.......................................................................... 错误!未定义书签。
1.2设计要求.......................................................................... 错误!未定义书签。
2系统结构设计............................................................................. 错误!未定义书签。
2.1设计原理及框图.............................................................. 错误!未定义书签。
2.2设计芯片说明.................................................................. 错误!未定义书签。
3硬件设计..................................................................................... 错误!未定义书签。
3.1电源设计.......................................................................... 错误!未定义书签。
基于TMS320LF2407的FFT算法

基于TMS320LF2407的FFT算法的实现及应用傅立叶变换是一种将信号从时域转变为频域表示的变换形式,它是数字信号处理中对信号进行分析时经常采用的一种方法。
信号的一些特性在时域总是表现得不明显,通过傅里叶算法,将其变换到频域,其特性就一目了然。
例如,来自供电系统的干扰在时域上总是不易识别,但是在频域上就可以很清晰地看到50~60 Hz的离散谐波。
在计算机系统中,实际上是以离散傅立叶变换(DFT)的方式处理数据。
由于DFT的运算量比较大,并不适用于嵌入式控制系统,所以实际应用中常使用DFT 的快速算法一快速傅立叶变换(FFT)。
虽然FFT 比DFT的计算量减少了很多,但用普通单片机来实现FFT多点、实时运算还是比较困难的。
DSP(数字信号处理器)具有运算速度快和精度高的特点,恰好满足FFT的要求,能较好地解决这个问题。
1 快速傅里叶变换的原理非周期性连续时间信号x(t)的傅里叶变换可以表示为式中计算出来的是信号x(t)的连续频谱。
但是,在实际的控制系统中能够得到的是连续信号x(t)的离散采样值x(nT)。
因此需要利用离散信号x(nT)来计算信号x(t)的频谱。
有限长离散信号x(n),n=0,1,…,N-1的DFT定义为:可以看出,DFT需要计算大约N2次乘法和N2次加法。
当N较大时,这个计算量是很大的。
利用WN的对称性和周期性,将N点DFT分解为两个N/2点的DFT,这样两个N/2点DFT总的计算量只是原来的一半,即(N/2)2+(N/2)2=N2/2,这样可以继续分解下去,将N/2再分解为N/4点DFT等。
对于N=2m 点的DFT都可以分解为2点的DFT,这样其计算量可以减少为(N/2)log2N次乘法和Nlog2N次加法。
图1为FFT与DFT-所需运算量与计算点数的关系曲线。
由图可以明显看出FFT算法的优越性。
将x(n)分解为偶数与奇数的两个序列之和,即x1(n)和x2(n)的长度都是N/2,x1(n)是偶数序列,x2(n)是奇数序列,则其中X1(k)和X2(k)分别为x1(n)和x2(n)的N/2点DFT。
以TMS320LF2407最小系统为例的DSP设计方案_5_图文(精)

DSP 系统的构成一个典型DSP SOLUTION设计 设计步骤算法分析和优化; DSP 的选择; DSP 最小系统设计;模拟电路接口;系统控制电路;软件编写和调试系统测试与验证 一、数字化及实现1、信号分类2、采样定理1、信号分类模拟信号,傅立叶变换和拉普拉斯变换;离散信号,他是带有模拟信号,仍然使用傅立叶变换和拉普拉斯变换;数字信号,他是一个序列,使用离散傅立叶变换和Z 变换; 2. 采样定理低通采样定理抽样频率要至少大于信号最高频率的2倍;带通采样定理带通采样时采样频率不一定要满足Nyquist 准则,带通采样的采样频率选择方法为:(1)fs > 2 ∆f (BW(2)fs = 4fc / (2NZ-1其中,NZ=1,2,3,…的最大整数。
Company Logo3、ADC 种类•逐次比较ADC•双线性ADC•FLASH ADC•Σ-δADCΣ-δADC 采样过抽样技术,后接抽取滤波。
过抽样可以加大扩展频率间的间隔,从而降低前置抗混叠滤波器要求。
抽取滤波会使频谱扩展,他要完成抽取和滤波两个作用。
可以用多相滤波,梳状滤波,半带滤波。
Edit by hyw0663 Company Logo4. ADC 指标最高采样频率;分辨率;无杂散动态范围;差分非线性失真;微分非线性失真;互调失真;孔径抖动;;Edit by hyw0663 Company Logo5、硬件设计①DSP 同串口ADCTLC320AC0X 是TI 公司的串口ADC ,他们的速度虽然不快,但是,可以同DSP 进行无缝链接,硬件设计简单。
Edit by hyw0663 Company Logo②DSP 同并口ADC并口ADC 通常管脚功能简单,有片选,输出使能,地址,数据,中断。
我们把ADC 作为DSP 的外部I/O空间,通过译码电路,可以实现DSP 与ADC 的接口。
译码电路通常使用CPLD 或者FPGA 。
各个管脚的功能要通过查找数据手册,这些手册可以同过下面方法获取:Edit by hyw0663 Company Logo二、DSP 芯片简介1、2407管脚分布图2、管脚的分类数据信号初始化,中断和复位操作多处理信号存储器控制信号振荡器/计时器信号多通道缓冲串行端口主机端接入信号电源PNS测试管脚Edit by hyw06633、管脚注意事项外部中断不使用时拉高复位管脚有效的要求MP/MC管脚在启动时起作用 HOLD 和HOLDA 的作用 JTAG 接口 XF 标志READY 和HPIREADY 时钟控制电源三、时钟设计1、电路的两种接法:内部振荡器,实际是内部一个放大器,外部是无源晶振外部晶振,实际是有源晶振External Clock2、时钟模式输入时钟通过一个锁相环电路PLL ,对输入时钟分频(DIV 模式)或者倍频(PLL 模式),然后传给CPU 作为工作时钟;硬件控制PLL 是指通过管脚来定义是倍频还是分频,一旦硬件完成,CPU 频率固定,不可变换,用于较早DSP 。
基于TMS320LF2407A的CAN总线数据采集系统

中图分类号 : T P 2 1 2
文献标识码 : A
文章编号 : 1 0 0 2—1 8 4 1 ( 2 0 1 4 ) 0 1 — 0 1 0 0— 0 3
CAN Bu s I n t e l l i g e n t Mu l t i —P a r a me t e r Me a s u r e me n t a n d Co n t r o l S y s t e m Ba s e d i n TM S 3 2 0 LF 2 4 0 7 A
基于TMS320LF2407的电机控制系统设计说明

XXXXXXXX大学XXXXXXXXXXXXX X学院《DSP原理及应用》题目:基于TMS320LF2407的电机控制系统设计专业:班级:姓名:学号:指导教师:2015年5 月19 日摘要直流电动机具有优良的调速特性,调速平滑,方便,调速范围广,过载能力大,能承受频繁的冲击负载,可实现频繁的无级快速起动、制动和反转;能满足生产过程中自动化系统各种不同的特殊运行要求。
电动机调速系统采用微机实现自动控制,是电气传动发展的主要方向之一。
采用微机控制后,整个调速系统体积小,结构简单、可靠性高、操作维护方便,电动机稳态运转时转速精度可达到较高水平,静动态各项指标均能较好地满足工业生产中高性能电气传动的要求。
本篇论文介绍了基于单片机的直流电机PWN调速的基本办法,直流电机调速的相关知识以及PWM调速的基本原理和实现方法。
重点介绍了基于TMS320LF2407单片机的用软件产生PWM信号以及信号占空比调节的方法。
对于直流电机速度控制系统的实现提供了一种有效的途径。
关键词:单片机最小系统;PWM ;直流电机调速;前言电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。
无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。
据资料显示,在所有动力资源中,百分之九十以上来自电动机。
同样,我国生产的电能中有百分之六十是用于电动机的。
电动机与人的生活息息相关,密不可分。
电气时代,电动机的调速控制一般采用模拟法,对电动机的简单控制应用比较多。
简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。
然而近年来,随着技术的发展和进步,以及市场对产品功能和性能的要求不断提高,直流电动机的应用更加广泛,尤其是在智能机器人中的应用。
直流电动机的起动和调速性能、过载能力强等特点显得十分重要,为了能够适应发展的要求,单闭环直流电动机的调速控制系统得到了很大的发展。
基于TMS320LF2407A的DSP系统设计及其应用
基于TMS320LF2407A的DSP系统设计及其应用1 引言TMS320LF2407A数字信号处理器是TI公司的一款C2000系列的浮点型DSP 控制器,相比TMS320C54X定点DSP,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等.它采用内部3.3V供电,外部5V供电,因而功耗较低.且主频高达40MHz,处理速度快,是需要浮点运算便携式产品的理想选择.本文采用TMS320LF2407A作为主芯片设计一个DSP的应用系统.2 硬件系统构成DSP系统的设计包括DSP芯片、电源电路、复位电路、时钟电路、JATG电路。
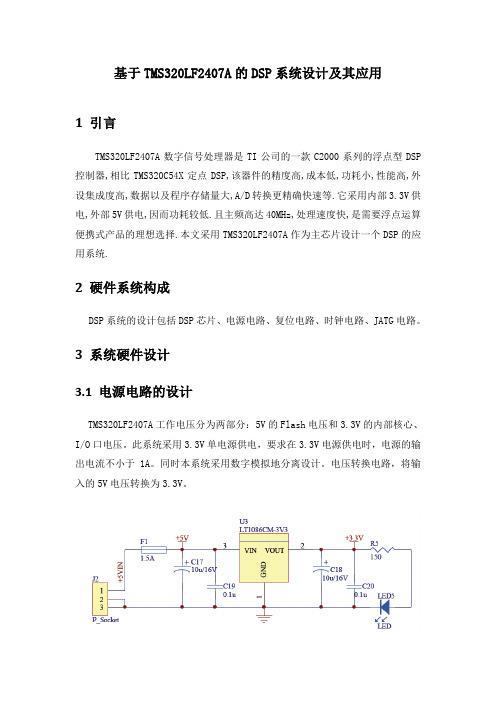
3 系统硬件设计3.1 电源电路的设计TMS320LF2407A工作电压分为两部分:5V的Flash电压和3.3V的内部核心、I/O口电压。
此系统采用3.3V单电源供电,要求在3.3V电源供电时,电源的输出电流不小于1A。
同时本系统采用数字模拟地分离设计。
电压转换电路,将输入的5V电压转换为3.3V。
图1 电源电路原理图所以采用一片LT1086电源芯片。
同时提供高达1.5A 的输出电流而设计,足够TMS320LF2407A及外围器件的使用,而且价格低廉,使用广泛。
值得注意的是TMS320LF2407A的A/D应该采用模拟3.3V供电;它的VCCP引脚应该用5V电源上拉或者接地,但是不能悬空。
当用5V电源上拉时,也不需要任何限流电阻接在VCCP上,因为该电源将为Flash编程提供电源;当该引脚接GND上时,表示TMS320LF2407A不需要编程。
3.2 复位电路的设计复位电路的设计采用手动复位和上电复位两种功能,所以采用MAX708T作为微处理器电源监控芯片,具有上电复位、掉电监测、手动复位输入功能,200UA 静态电流;VCC=+5V,该电路在上电、掉电或电源不稳定时产生一个低电平复位信号输出、复位脉冲宽度200ms,VCC=1V时,保证/RESERT有效;当watchdog 输入在1.6s内未能触发时,将产生低电平有效的watchdog输出信号;1.25V门限监测器用于掉电警告、低电池检测和监视+5V以外的电源;消抖动的TTL/CMOS 兼容的低电平的手动复位输入;用一个高电平有效的复位信号代替了watchdog 定时器,当电源低于4.40V时产生复位脉冲。
基于TMS320LF2407的运动相机控制系统设计

基于TMS320LF2407的运动相机控制系统设计随着计算机和信息技术的飞跃进展,使具有迅速和高精度处理能力的浮现并广泛应用。
本文设计了一种通过DSP实现对运动相机控制的系统,可以使常规方式无法举行的拍摄工作变得轻松,并能达到抱负效果。
实现了相机迅速到达指定位置,举行5点拍摄,并确保拍摄到的图像不失真。
1 系统原理
基于TMS320LF2407的运动相机控制系统框图1所示。
图1 基于DSP的运动相机控制系统框图
DSP在GPIO的驱动下将输入的命令举行处理,经过光电耦合和功率放大后,驱动工作,步进电机和相机机架上的齿轮结构衔接,控制相机完成5点拍摄工作。
运动相机的控制原理2所示。
运动相机控制系统需要完成相机在某个时刻迅速运动到指定位置1点,立刻停止,对准目标拍照并保证图像清楚,然后以同样标准在位置2点、位置3点、位置4点、位置5点拍照,再按原路迅速返回到位置1点,等待下一个拍摄周期的到来。
图2 运动相机控制原理
2 系统硬件设计
在运动相机控制系统中,需要控制相机做“重复启停”运动,即在某些时刻要求相机迅速运动,在特定时刻快速停止,并能保证停止时相机静止不动,确保拍摄到的图像不失真。
因此要求所选电机应易于启停控制的同时,还要具有锁定能力。
本系统采纳运动控制系统中广泛应用的步进电机作为执行元件。
步进电机是按照组合电磁铁的理论设计的,是一种将有效电脉冲信号改变为相应的角位移或直线位移的开环控制元件。
步进电机通过专用的电源把电脉冲信号按一定挨次供应定子各相控制绕组,在气隙中产
第1页共4页。
基于TMS320LF2407的无刷直流电机伺服控制系统设计

以选择 由任 何一个 事件 管理器 来触 发 . 串行通讯 接 口(C ) 块 ,6位 的 串行 外设 (P) 口模块 ,0 S I模 1 SI 接 4
个 可单 独编 程 的通 用输 人/ 出 引脚 ( P O) 以及 输 GI , 5个外 部 中断 ( 个 电机 驱 动保 护 、 位 和两 个 可 两 复 屏 蔽 中断 ) . 等 利 用 T 3 0 F 4 7 的这些 特点 , MS 2 L 2 0 A 可实 现 伺 服驱 动系统 的 功能 , 用 S I 使 C 模块接 收上层 主 机发 出 的参考输 入 和控制 命令 、 响应 上层 主机 的查 询命
电机 的直流母 线上 电 流 , 现 对 P 实 WM 波进 行 相应 的调节 ; 防止 电机过 流发生 故 障. 这里 要注 意的是 , 当要获取 采样 电流 时 , 出 P 输 WM 波 的通用 定 时器 要 采用 连续 增 减 模 式 , 周 期 匹配 事 件 启 动 A C 在 D
组成 : 运算放大电路和隔离电路. 所使用的芯 片是
最 常用 的 L 2 该 芯 片最 主要 的好 处是 单 电源供 M34,
电 , 电电压 可 以从 3~3 这样 给芯 片 供 电带 供 2V, 来方 便 , 而且 性 能 稳定 , 用方 便 , 使 电路 简单 . 级 前 为放 大 电路 , 同相输 人 端 输入 电压 信 号 , 经过 运 算 放 大在 1号 端 口输 出 , 放 大 的 倍 数 为 ( 所 1+R / 5 R )第 二级 为 电压 跟 随器 , 到 隔离 和 匹 配 的作 4. 起 用, 它也是 同相 输 入端 输 入 , 于 同相 输 入 端 的输 对
案, 实现 整个 控制 系统更 优性 能 打下基 础 .
基于TMS320LF2407A的CAN总线数据采集系统
基于TMS320LF2407A的CAN总线数据采集系统刘海波;王红艳;李爱宁;何洪【摘要】以TM320为核心设计了CAN总线数据采集系统,该系统利用CAN总线的特点和性能优势,结合数据采集系统的现状,给出了数据采集系统的总体结构设计,通过CAN总线将每一个独立的数据节点连接起来,实时采集数据传送到以TM320为核心的上位机进行处理;监测节点以STC89C58RD+作为微处理器,SJA1000作为CAN总线控制器,82C250作为CAN总线收发器并通过CAN控制器MCP2510与上位机通信.该系统稳定可靠,并具有很好的扩展性,能够很好地满足多种控制系统数据采集的需要,自动化程度大大提高.【期刊名称】《仪表技术与传感器》【年(卷),期】2014(000)001【总页数】3页(P100-102)【关键词】CAN总线;TM320;数据采集【作者】刘海波;王红艳;李爱宁;何洪【作者单位】河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001;河北工程技术高等专科学校,河北沧州061001【正文语种】中文【中图分类】TP2120 引言随着数字化、信息化时代的到来,现场总线技术已经广泛地应用于工业控制中,涉及行业和领域非常广泛,其中汽车制造、化工生产、钢铁制造、煤矿生产、智能建筑等应用广泛,而且尤其以CAN总线在这些行业应用中的份额较大。
其主要原因就是由于CAN总线具有可靠性高、成本低、容易实现等优点,而且其传输速率高、抗电磁干扰能力强,当传输距离达到10 km时传输速度仍可达到5kbps[1]。
在CAN总线的各种应用系统中,都有大量的现场参数需要测量,从而实现对整个系统的控制和监测。
对现场参数测量来说数量大、测量点分散、测量精度要求也高,如何运用先进技术实现多参数智能测控值得我们去研究。
文中以TM320为核心,设计了CAN总线智能数据采集系统,实现将多种被测参数集中进行测量、处理、显示和记录,并与控制系统相连实现自动控制和调节。
基于TMS320LF2407的多任务实时处理系统设计
基于TMS320LF2407的多任务实时处理系统设计
王海英;王磊
【期刊名称】《工程设计学报》
【年(卷),期】2005(012)006
【摘要】以一个四任务、四优先级的实时处理系统为例,详细分析了其构造过程、实现原理和软件设计方法,设计了基于TMS320LF2407微处理器的多任务实时处理系统.结合工程实例,讲述了多任务实时处理系统在柴油机电控系统中的应用.结果表明,此多任务实时处理系统设计简单,实现方便,效果良好.
【总页数】4页(P348-351)
【作者】王海英;王磊
【作者单位】长安大学,工程机械学院,陕西,西安,710064;同济大学,中德学院,上海,200092
【正文语种】中文
【中图分类】TP273;TP274.2
【相关文献】
1.多星多任务数传数据实时处理系统设计 [J], 杨甲森;孟新;王春梅
2.在单片AT89C52上实现多任务实时处理 [J], 沈红星
3.在单片AT89C52上实现多任务实时处理 [J], 沈红星
4.基于TMS320LF2407控制器的实时多任务系统研究 [J], 杨利红;马旭东;严佳君
5.多任务遥测数据实时处理系统 [J], 贾海艳;于瑞年
因版权原因,仅展示原文概要,查看原文内容请购买。
基于TMS320LF2407的高速数据采集系统设计与实现

基于TMS320LF2407的高速数据采集系统设计与实现
李波;陈剑云;黄玮;左丽霞
【期刊名称】《电力系统保护与控制》
【年(卷),期】2008(036)005
【摘要】设计了一种基于TI公司生产的TMS320LF2407 DSP芯片和14位A/D 芯片MAX 125的实时数据采集系统.设计了硬件电路的核心部分:电流电压的信号处理电路和AD转换控制电路.详细介绍了AD转换的控制和实现过程的软件实现方法.最后对该数据采集系统进行了测试,结果表明该系统在精度、采集速度和同步采样方面具有良好的性能,且结构简单,成本低廉.该系统将得到广泛的使用.
【总页数】4页(P59-62)
【作者】李波;陈剑云;黄玮;左丽霞
【作者单位】华东交通大学电气与电子工程学院,江西,南昌,330013;华东交通大学电气与电子工程学院,江西,南昌,330013;华东交通大学电气与电子工程学院,江西,南昌,330013;华东交通大学电气与电子工程学院,江西,南昌,330013
【正文语种】中文
【中图分类】TM76
【相关文献】
1.基于TMS320LF2407的高速数据采集系统 [J], 于万霞;张建民
2.基于TMS320LF2407DSP芯片的水电机组高速数据采集系统 [J], 贺秀儒;程远楚;郭智俊
3.基于PCI-E的惯组高速数据采集系统设计与实现 [J], 宋仔标;崔洪亮;高倩;刘宁
4.基于PCIe总线的高速数据采集系统设计与实现 [J], 尤焜
5.基于FPGA的高速数据采集系统设计与实现 [J], 吴明锋
因版权原因,仅展示原文概要,查看原文内容请购买。
基于TMS320LF2407数字滤波系统的设计

系统程序流程图如 图 3 , 采用 模块化 设计方 法依 据系 统功 能将整个程序分 成若 干个模 块 , 每个模 块完 成特 定的计 算、 处 理或控制功能。这 些模块 包括 系统初 始化 模块、 启 动模 块、 信 号采集处理模块和串行通信模块 等。 来自传感器的模拟信号 , 经模拟适配 电路转换 处理后 转变 为与 T M S320LF2407A 引 脚输 入电 压相 匹配 的模 拟 电压 信号 , TM S320LF2407A 启动内部 AD 转换器对此信 号进行 模数转换 , 将采集到的数据 送入 滤波运 算模 块 , 进 行滤 波处 理 , 处 理后 的 数据通过串行通信模块上传到 PC 机。图 3 还 包括信号 采集处 理的时序控制流 程 , 该部分 实际 上是由 采样、 锁 存输出 与控 制 相互联系共同 组成 的 , 时 序控 制的 目 的就 是要 顺 利的 将 ADC 采样进来的信号经过滤波算法后 从锁存输出模块发送出去。
2011 年 第 1期
仪 表 技 术 与 传 感 器
Instrum ent T echn ique and Sensor
2011 No 1
基于 T M S320LF2407数字滤波系统的设计
汪玉凤 , 王 慧
125105 ) ( 辽宁工程技术大学电气与控制工程学院 , 辽宁葫芦岛
摘要 : 为从复杂的信号提取所需要的Байду номын сангаас号同时抑制干扰信号 , 设计一种基于 D SP 并在 M ATLA B 工具和 CCS 环境下操 作的数字滤波系 统 。系统 以 DSP 芯片 TM S320LF2407 为核心并结合了其他硬件模块及软件编程 , 在 M ATLAB 平台上进行 了仿真试验 , 将 CCS 开发工具和 M ATLA B 仿真相结合成功地进 行了软件 编译调 试并观 察 。 实验表 明 , 该方法简 单可靠 , 有效可行 , 具有较好的应用价值 。 关键词 : TM S320LF2407; 数字滤波器 ; 信号采集及处理 中图分类号 : TN713+ . 7 文献标识码 : A 文章编号 : 1002- 1841( 2011) 01- 0052- 03
基于TMS320LF2407A的脑电信号采集系统的设计

基于TMS320LF2407A的脑电信号采集系统的设计
张建利;李文丰
【期刊名称】《世界电子元器件》
【年(卷),期】2004(000)011
【摘要】本文介绍了基于TMS320LF2407A的脑电信号采集系统的整个设计过程.为了确保电池电量充足和采集的信号为脑电信号,在本系统之前添加了电平测量和阻抗测试这两个模块.
【总页数】3页(P37-39)
【作者】张建利;李文丰
【作者单位】北京理工大学电子工程系;北京理工大学电子工程系
【正文语种】中文
【中图分类】TN91
【相关文献】
1.基于ADS1299的可穿戴式脑电信号采集系统前端设计 [J], 谢宏;李亚男;夏斌;姚楠
2.基于STM32的脑电信号采集系统设计 [J], 王琼颖;张宏民;李竹琴;刘志勇;王乐凡;孙金玮
3.基于LABVIEW的脑电信号虚拟采集系统设计 [J], 朱龙飞
4.基于Android的脑电信号无线采集与分析系统设计 [J], 谢宏;钱门超
5.基于STM32的便携式脑电信号采集处理系统设计 [J], 赵丽;刘泽华;邢潇
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数 据 。这 种 高效 的数 据 采 集 与 处 理 系统 . 广 泛 地 应 用 于 各 种 智 能 仅 表 、 可 自动 化 控 制 设 备 中 , 很 好 的 市场 应 用前 景 。 有
关 键 词 : 字信 息处 理 ; D 8 6 ; 据 采 集 数 A S 34数 中 图 分 类 号 : N9 1 T 1 文献 标 志码 : A
De i n o t q i i g a o e sn s e Ba e n TM S 2 LF2 0 sg f Da a Ac u r n nd Pr c s i g Sy t m s d o 30 47
S ONG n .in, Yo gxa CHEN Ja io
i u n n aaT e d t c u r g a d p o e sn y t m a e a p i d t a o s i tl g n e i sr me t d a - t r n i g d t . aa a q i n s h i n r c s i g s se c n b p l o v r u nel e c n t e i i u n s a u- n t mai o t l e u p n s a d t e e i ey g o r k t fr g o n . o t c nr q ime t , n h r s a v r o d ma e o e r u d c o
Ke r s dst i a r e s g DS ; y wo d :i a sg l po si ( P) ADS 3 ; aa a q in l n c n 8 6 d t c ur g 4 i
电力 系统 配 网 自动 化是 一个 庞大 、 杂 、 合性 复 综 的系统 工程 ,如 何将 配 电 网在 正 常及 事故 情况 下 的 监测、 保护 、 控制 有机 融合 在一 起 , 提高 供 电质量 。 是
摘 要 : 于DS 的数 据 采 集 系统相 对 于基 于单 片机 的数 据 采 集 系 统更 能 满 足 电 力 系统在 精 基 P
确 度 和 实 时性 方 面的 要 求 。 先 对 芯 片T 3 o F 4 7 D¥ 3 4 特 点做 了介 绍 , 点 阐 首 MS 2 L 2O 和A 8 6 的 重
维普资讯
文章编号 :0 19 4 (0 70 —0 50 10 —942 0 )607 —4
基 于T 3 0 F 4 7 MS 2 L 2 0 的数 据 采集与处理 系统 的设计
宋 永 献 , 娇 2 陈
(. 1 淮海 工 学 院 电子 工 程 系 , 云 港 2 2 0 ; 常 州 信 息 职 业技 术 学 院 电子 系 , 州 2 3 6 ) 连 2 0 5 2. 常 1 1 4
t e DS . e s s m i l e ie h u c in c u ae a q ii g t e sg a n e e t c p w r s se , ntrn h PT y t h e ma n y r a z s t e f n t s o a c r t c u r h i l i l cr l o f n n i o e y tm mo i i g o
Ab t a t T e aa a q i n s se sr c : h d t c ur g y t m b s d n i a e o DS c n aif t e e n d o ih r c u a y n r a t i P a s t y h d ma s f h g e a c r c a d e l i s me n ee t c p we y t m, ih s o a e t h s se l cr o r s se wh c i i c mp r d wi t e y tm b s d o co o tol r h s a e ds u s s h c aa . h a e n mir c n r l . i e T p p r i s e t e h r c c tr t s o ei i TM¥ 2 L 2 0 d ADS 3 . d fc s s o h a d r e d sg h sc f 30 F 4 7 a n 8 6 a o u e n t e h r wa e in o t e AD8 6 d i it r c i 4 n f 3 4 a t nef e wt n s a h
( , p rme to lcrnc n ie r g, ah i n tue f c n lg L a y n a g 2 2 0 C ia 2De at n 1De at n f E eto i E gn e n Hu ia Isi t o Teh oo y,in u gn 2 0 5, hn ; . p r i t me to f E et nc E gn e n , h n zo olg nomain Teh oo y, h n z o 1 1 4, hn ) lcr i n ie r g C a gh u C l e o Ifr t c n lg C a gh u 2 3 6 C ia o i e f o
述 了A S 3 4 D 86 的硬 件 设 计 以及 与 D P 接 口 电路 。该 系统 主 要 完成 电力 系统 中模 拟 信 号 的 S的 精 确 采 集 , 时 监 测 电 力 系 统 的 运 行 状 况 . 故 障 时 可 向 上 位 机 报 警 . 时记 录 实 时运 行 实 在 同