对无人机地面站软件设计的两种常用方法的比较
无人机地面站的设计
高 新 技 术4科技资讯 SC I EN C E & TE C HN O LO G Y I NF O R MA T IO N无人机不仅在军事上得到了广泛的应用,而且在民用方面也得到了普遍重视。
随着计算机技术的发展,利用计算机的软、硬件,建立有关无人机的飞行、控制以及评估的仿真系统已经成为各国的共识。
而以往的飞行仿真中,得到的结果都是大量的数据或曲线,不具有直观性。
可视化技术的出现,使得仿真结果不再单调,甚至人们可以与计算机进行直接交互,对虚拟世界中具有形体的信息进行操作,实现了人、机合一。
“无人机地面站”正是运用计算机图形学知识结合现代计算机仿真技术实现的仿真系统,它为地面人员提供了一个形象的、虚拟的飞行界面,用于显示无人机的各种飞行参数,更加方便地实现地面人员对无人机的控制。
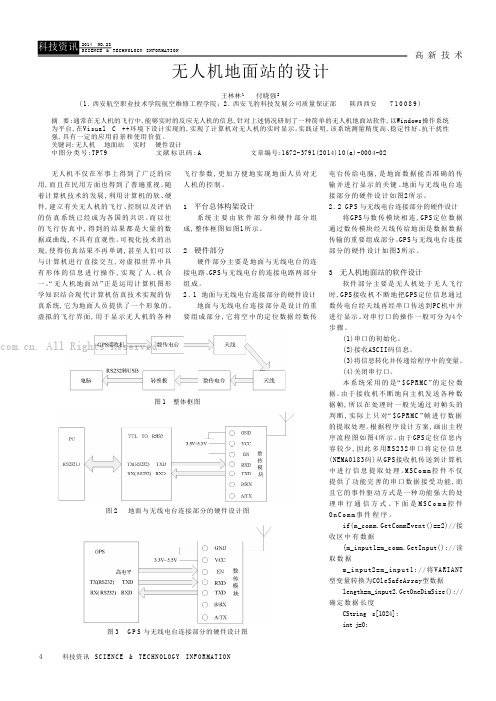
1 平台总体构架设计系统主要由软件部分和硬件部分组成,整体框图如图1所示。
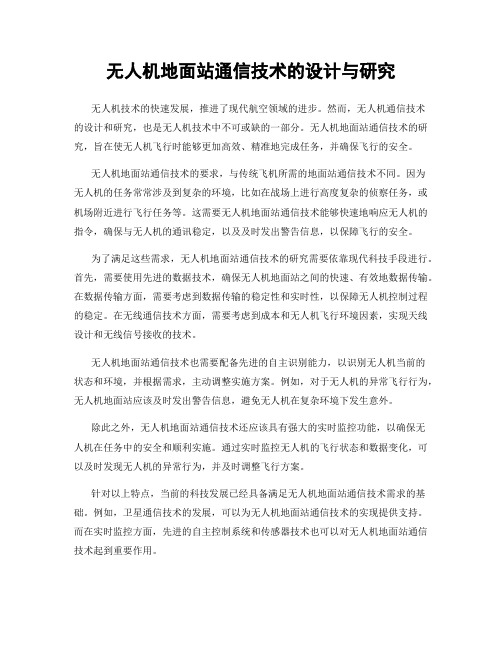
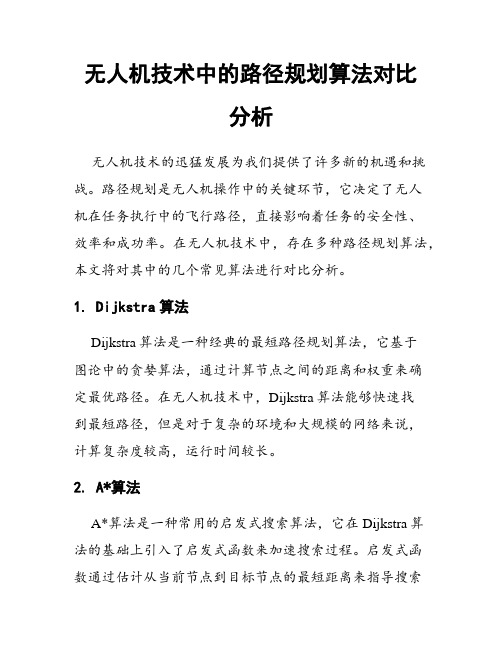
2 硬件部分硬件部分主要是地面与无线电台的连接电路、GPS与无线电台的连接电路两部分组成。
2.1地面与无线电台连接部分的硬件设计地面与无线电台连接部分是设计的重要组成部分,它将空中的定位数据经数传无人机地面站的设计王林林1 付晓强2(1.西安航空职业技术学院航空维修工程学院;2.西安飞豹科技发展公司质量保证部 陕西西安 710089)摘 要:通常在无人机的飞行中,能够实时的反应无人机的信息,针对上述情况研制了一种简单的无人机地面站软件,以Windows操作系统为平台,在Visual C ++环境下设计实现的,实现了计算机对无人机的实时显示。
实践证明,该系统测量精度高、稳定性好、抗干扰性强,具有一定的应用前景和使用价值。
关键词:无人机 地面站 实时 硬件设计中图分类号:TP79文献标识码:A 文章编号:1672-3791(2014)10(a)-0004-02电台传给电脑,是地面数据能否准确的传输并进行显示的关键。
地面与无线电台连接部分的硬件设计如图2所示。
无人机地面站通信技术的设计与研究
无人机地面站通信技术的设计与研究无人机技术的快速发展,推进了现代航空领域的进步。
然而,无人机通信技术的设计和研究,也是无人机技术中不可或缺的一部分。
无人机地面站通信技术的研究,旨在使无人机飞行时能够更加高效、精准地完成任务,并确保飞行的安全。
无人机地面站通信技术的要求,与传统飞机所需的地面站通信技术不同。
因为无人机的任务常常涉及到复杂的环境,比如在战场上进行高度复杂的侦察任务,或机场附近进行飞行任务等。
这需要无人机地面站通信技术能够快速地响应无人机的指令,确保与无人机的通讯稳定,以及及时发出警告信息,以保障飞行的安全。
为了满足这些需求,无人机地面站通信技术的研究需要依靠现代科技手段进行。
首先,需要使用先进的数据技术,确保无人机地面站之间的快速、有效地数据传输。
在数据传输方面,需要考虑到数据传输的稳定性和实时性,以保障无人机控制过程的稳定。
在无线通信技术方面,需要考虑到成本和无人机飞行环境因素,实现天线设计和无线信号接收的技术。
无人机地面站通信技术也需要配备先进的自主识别能力,以识别无人机当前的状态和环境,并根据需求,主动调整实施方案。
例如,对于无人机的异常飞行行为,无人机地面站应该及时发出警告信息,避免无人机在复杂环境下发生意外。
除此之外,无人机地面站通信技术还应该具有强大的实时监控功能,以确保无人机在任务中的安全和顺利实施。
通过实时监控无人机的飞行状态和数据变化,可以及时发现无人机的异常行为,并及时调整飞行方案。
针对以上特点,当前的科技发展已经具备满足无人机地面站通信技术需求的基础。
例如,卫星通信技术的发展,可以为无人机地面站通信技术的实现提供支持。
而在实时监控方面,先进的自主控制系统和传感器技术也可以对无人机地面站通信技术起到重要作用。
总的来说,无人机地面站通信技术的研究和设计是无人机技术开发的关键所在。
只有在这方面不断进行探索和研究,才能更好地实现无人机技术的发展和应用,让无人机更好地服务于人类的各个领域。
无人机技术中的路径规划算法对比分析
无人机技术中的路径规划算法对比分析无人机技术的迅猛发展为我们提供了许多新的机遇和挑战。
路径规划是无人机操作中的关键环节,它决定了无人机在任务执行中的飞行路径,直接影响着任务的安全性、效率和成功率。
在无人机技术中,存在多种路径规划算法,本文将对其中的几个常见算法进行对比分析。
1. Dijkstra算法Dijkstra算法是一种经典的最短路径规划算法,它基于图论中的贪婪算法,通过计算节点之间的距离和权重来确定最优路径。
在无人机技术中,Dijkstra算法能够快速找到最短路径,但是对于复杂的环境和大规模的网络来说,计算复杂度较高,运行时间较长。
2. A*算法A*算法是一种常用的启发式搜索算法,它在Dijkstra算法的基础上引入了启发式函数来加速搜索过程。
启发式函数通过估计从当前节点到目标节点的最短距离来指导搜索方向,提高了搜索效率。
在无人机路径规划中,A*算法能够在复杂环境中快速找到最优路径,但是需要预先知道目标节点的位置,并且对启发函数的设计要求较高。
3. RRT算法RRT(Rapidly-exploring Random Trees)算法是一种基于随机采样的快速搜索算法。
它通过随机选择采样点,并在搜索树中进行逐步扩展,最终找到路径。
在无人机技术中,RRT算法能够有效处理高维空间的搜索问题,适用于复杂环境下的路径规划。
但是,RRT算法也存在局部最优问题,可能导致无人机不能找到全局最优路径。
4. D*算法D*算法是一种增量路径规划算法,它能够在遇到环境变化时快速调整路径。
D*算法通过局部信息的更新与传播来适应环境的变化,并实时生成新的路径。
在无人机技术中,D*算法能够应对环境变化频繁的情况,使无人机能够实时调整飞行路径。
5. PSO算法PSO(Particle Swarm Optimization)算法是一种仿生优化算法,通过模拟鸟群或粒子的群体行为来获得最优解。
在无人机路径规划中,PSO算法能够在搜索空间中快速找到最优路径,并且对问题的输入和约束条件没有要求,具有较好的适应性。
无人机航迹规划中的路径规划算法比较与优化

无人机航迹规划中的路径规划算法比较与优化无人机(Unmanned Aerial Vehicle,简称无人机)作为近年来飞行器技术的重要突破之一,在航空航天、军事、农业、物流等领域发挥着重要作用。
在无人机的飞行控制中,路径规划算法的选择至关重要,它决定了无人机的飞行轨迹,直接影响着无人机飞行的效率和安全性。
本文将对几种常见的无人机路径规划算法进行比较与优化分析。
1. 最短路径算法最短路径算法是无人机航迹规划中最常用的算法之一。
其中,迪杰斯特拉(Dijkstra)算法和A*算法是两种主要的最短路径算法。
迪杰斯特拉算法是一种基于广度优先搜索的算法,通过不断更新每个节点的最短路径长度,最终确定无人机飞行的最短路径。
A*算法在迪杰斯特拉算法的基础上加入了启发式函数,能够更加准确地估计路径的代价。
2. 遗传算法遗传算法是一种模拟自然界进化过程的优化算法。
它通过对候选路径进行遗传操作(如选择、交叉、变异等),通过适应度函数对路径进行评估,最终得到适应度最高的最优路径。
遗传算法具有较好的全局搜索能力,能够寻找到较优的飞行路径。
3. 蚁群优化算法蚁群优化算法模拟了蚂蚁的觅食行为,通过信息素的交流和更新来实现路径的优化。
蚁群算法具有较强的自适应性和鲁棒性,能够快速找到较优的路径。
在无人机航迹规划中,蚁群算法可以有效解决多无人机协同飞行的问题。
4. PSO算法粒子群优化(Particle Swarm Optimization,简称PSO)算法模拟了鸟群觅食的行为,通过不断地更新粒子的位置和速度,寻找最优解。
PSO算法具有较好的收敛性和全局搜索能力,在无人机航迹规划中能够有效地找到较优的路径。
5. 强化学习算法强化学习算法是一种通过试错和奖惩机制来优化路径选择的算法。
它通过构建马尔可夫决策过程(Markov Decision Process,简称MDP)模型,通过不断地与环境交互来学习最优策略。
强化学习算法在无人机航迹规划中能够适应环境的变化,快速学习到最优路径。
无人机监测系统的设计与实现
无人机监测系统的设计与实现随着科技的不断发展,无人机监测系统在各行各业得到了广泛的应用。
本文将讨论无人机监测系统的设计与实现,包括系统的功能需求、硬件设计、软件设计以及实际应用案例。
一、功能需求无人机监测系统主要用于获取、分析和处理目标区域的数据信息。
根据具体应用的需求,无人机监测系统的功能需求可以有所不同。
下面是一些常见的功能需求:1. 实时图像传输:无人机搭载高清相机或红外摄像头,能够实时传输图像或视频,用户可以通过地面站或移动设备查看监测区域的实时情况。
2. 数据采集与存储:系统能够采集传感器数据,如温度、湿度、气体浓度等,并将这些数据进行存储和分析。
3. 航线规划与自动飞行:用户可以通过地面站预设无人机的航线,无人机能够自动飞行并执行任务。
4. 目标识别与跟踪:系统能够通过图像处理和模式识别算法,自动识别目标并跟踪其运动轨迹。
5. 高精度定位:无人机监测系统需要具备高精度的定位能力,可以通过GPS、GLONASS等卫星系统定位,并支持差分GPS等技术提高定位精度。
二、硬件设计无人机监测系统的硬件设计包括无人机的选型和传感器的选择。
下面是一些常见的硬件设计要点:1. 无人机选型:根据应用需求和航程要求选择合适的无人机。
无人机的载重能力、续航时间以及飞行稳定性是选型的重要考虑因素。
2. 摄像头选择:根据监测需求选择合适的摄像头。
对于需要夜间监测的应用,还可以选择红外摄像头。
3. 传感器选择:根据应用需求选择适当的传感器,如温度传感器、气体传感器等,确保获取到有效的监测数据。
4. 通信模块:选择稳定可靠的无线通信模块,用于与地面站进行实时数据传输。
三、软件设计无人机监测系统的软件设计主要包括地面站软件和嵌入式软件两部分。
下面是一些软件设计要点:1. 地面站软件:地面站软件用于监视和控制无人机,可以实时接收并显示无人机传回的图像和数据,提供航线规划、目标跟踪等功能。
2. 嵌入式软件:嵌入式软件用于无人机上的控制和数据处理。
无人机地面站控制台软件设计

中图分类号 :P 9 T 31
文献标识码 : A
文章编号 :0 0— 89 20 ) 4— o 4- 3 10 8 2 (0 7 0 0 7 0
De in o n r lP a f r o t r o sg fCo t o l to m S fwa e f r UAV’ o n n r lS a in SGr u d Co t o t t o
to in.
Ke r s UA go n o t lsa o ; a iai n L b i d w / VI y wo d : V; ru d c n r tt n n vg t ; a W n o s C o i o
无人机 系统 发展 较早 , 是前 期受重视程度不 高。直到近 但
言 的开发人 员建立检测系统 、 自动测试环境 、 数据采集 系统 、 过
各项功能的成功实现。常见 的地面站 由控 制 台、 导航台和传输
系统这 3 个大 的部分组成。其中的控制 台是 3 个分 系统 中的中
程监控 系统 、 虚拟仪器等提供 了一个理想的软件开发环境 。
心, 负责处理传输系统接 收到的数 据 , 向导航 台发送数据 , 以及 数据 向外部世界的分发 。
rs l s o h t h ot a ec uf l t e tr e. ae e si g i tb l yo e l me t i s f a e h n e u x ii e ut h wst a e s f r a f l lal g t Wh tv rt t n sa i t rr a t w n i h a e n i i t , so t r a awo d r le h b — h w s f
1 无人机控制台系统 的组成
无人机地面站系统的设计与实现

无人机地面站系统的设计与实现随着科技的飞速发展,无人机已经成为了现代社会中不可或缺的一部分。
无人机在军事、民用、科研等领域都有着广泛应用。
然而,要确保无人机的顺利飞行和任务完成,就需要有一个稳定可靠的地面站系统与之配合。
本文将就无人机地面站系统的设计与实现进行探讨。
一、地面站系统的基本功能地面站系统是对无人机飞行进行监控和控制的中枢,其基本功能包括但不限于以下几点:1. 实时监控:地面站系统能够实时接收并显示无人机的飞行数据,包括飞行高度、速度、方向等信息。
可通过传感器或摄像头等设备,获取无人机实时图像和视频,以便操作人员能够对飞行环境和目标进行实时监控。
2. 任务规划:地面站系统能够为无人机设定飞行任务和航线,并进行路径规划和导航。
根据任务需求和环境条件,地面站系统能够智能分析和优化飞行路径,确保无人机安全、高效地完成任务。
3. 遥控操作:地面站系统通过无线通信技术与无人机进行远程遥控操作。
操作人员可以通过地面站的操作界面,对无人机进行起飞、降落、悬停、航向调整等操作,确保无人机在飞行过程中能够保持良好的姿态和动作。
4. 数据记录和分析:地面站系统对无人机的飞行数据进行记录和存储,包括航行路线、高度数据、传感器数据等。
操作人员可以根据需要对这些数据进行分析和研究,以改进无人机的性能和飞行策略。
二、地面站系统的设计要点1. 硬件设备选择:地面站系统需要使用合适的硬件设备,包括计算机、显示器、遥控设备等。
计算机应选择高效、稳定的台式机或服务器,遥控设备应具备灵敏可靠的操作控制。
2. 界面设计:地面站系统的操作界面应简洁明了、直观友好,使操作人员能够轻松掌握和操作。
应提供必要的按钮、滑块、输入框等控件,方便任务规划、飞行控制和数据分析。
3. 数据通信:地面站系统和无人机之间的数据通信是地面站正常运行的基础。
可以选择无线数据链或卫星通信等方式,确保数据的及时传输和稳定性。
4. 安全保密:地面站系统中应考虑数据的安全保密问题,特别是军事和敏感任务。
基于QT的无人直升机地面站集成管理软件设计与实现
www�ele169�com | 57软件开发0 引言对于无人直升机地面控制站来说,内部运行着多种类复杂的设备,几乎所有设备都和外界进行数据交互,控制站的正常运行依赖于这些设备的正常工作,由于站内设备数目众多且软件异构多样化,为每一款设备预留专门的监控软件是不现实、没有必要的,因而需要集成管理软件对所有设备进行集中进行监控、管理。
C++是强类型的面向对象开发语言,使用其开发的代码具有运行效率高、代码简洁、可直接操作硬件等优点。
但是,C++并没有专门的UI 组件,也缺乏可靠的线程通信机制。
QT 是一套跨平台的C++开发库,其封装了大量的工具库;界面源码与业务代码充分解耦合;QT 的信号槽机制十分适合UI 组件刷新。
因而本文利用QT 开发无人直升机地面站[1] 无人直升机地面站集成管理软件。
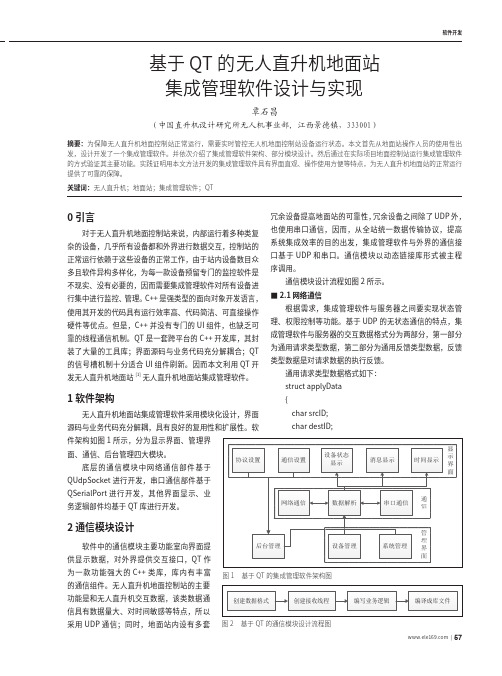
1 软件架构无人直升机地面站集成管理软件采用模块化设计,界面件架构如图1所示,分为显示界面、管理界面、通信、后台管理四大模块。
底层的通信模块中网络通信部件基于QUdpSocket 进行开发,串口通信部件基于QSerialPort 进行开发,其他界面显示、业务逻辑部件均基于QT 库进行开发。
2 通信模块设计软件中的通信模块主要功能室向界面提供显示数据,对外界提供交互接口,QT 作为一款功能强大的C++类库,库内有丰富的通信组件。
无人直升机地面控制站的主要功能是和无人直升机交互数据,该类数据通信具有数据量大、对时间敏感等特点,所以采用UDP 通信;同时,地面站内设有多套冗余设备提高地面站的可靠性,冗余设备之间除了UDP 外,也使用串口通信,因而,从全站统一数据传输协议,提高系统集成效率的目的出发,集成管理软件与外界的通信接口基于UDP 和串口。
通信模块以动态链接库形式被主程序调用。
通信模块设计流程如图2所示。
■2.1 网络通信根据需求,集成管理软件与服务器之间要实现状态管理、权限控制等功能。
基于UDP 的无状态通信的特点,集成管理软件与服务器的交互数据格式分为两部分,第一部分为通用请求类型数据,第二部分为通用反馈类型数据,反馈类型数据是对请求数据的执行反馈。
浅析无人机地面站软件与飞行任务规划设计

1 引 言
无人 驾驶 飞机 简 称 无 人 机 , 又被 称 为 空 中机 器人 , 是一 种 由无线 电遥 控 操纵 或 自主程 序 控 制 、 无人 驾驶 的一种 可重 复 使用 的航 空 器 。无 人 机 结
1rz d f n t n lb o k d a r m n he GCS wo k n o a e p e e td.F rt e sai ih s in p a ig a ie u c i a lc i ga a d t o r i g f w r r s ne l o h ttc f g tmiso lnnn l c n n tme tt e c re td ma d,a d n mi ih s in pa n n s u e a o e h u r n e n y a c f g tmiso ln i g i s d. An h ih s in p a nn l d t e f g tmiso l n ig l t c n q e i mp o e .Th e u t n d b g i g o l n y tm ra e tha e s wn ta h ro ma c f e h i u si r v d e r s l i e u g n n-ne a d s se tilts v ho h tte pefr n e o s i t e GC o wa e i tbl t ih rrla i t .I l s tsy b sc f n to e ur d i h S s f r s sa e wi h g e ei bl y twil aif a i u cinsr q ie n UAVsfih s t h i g t. l
无人机地面站三维一体化显控软件设计
几种无人机室内定位方法对比

几种智能机器人室内定位方法对比近年来随着控制算法的研究进展,无人机、无人车等智能机器人在各领域中发展迅速。
研发人员在对智能机器人进行相关研究时,通常需要完成室内环境下的模拟调试实验,在这些实验中,确定各智能体自身定位以及与其他智能体的相对位置,即进行精确定位,是十分重要的。
室内定位算法原理目前的定位算法从原理上来说,大体上可以分为以下三种。
一、邻近信息法:利用信号作用的有限范围,来确定待测点是否在某个参考点的附近,这一方法只能提供大概的定位信息二、场景分析法:测量接收信号的强度,与实现测量的、存在数据库的该位置的信号强度作对比。
三、几何特征法:利用几何原理进行定位的算法,具体又分为三边定位法、三角定位法以及双曲线定位法。
根据上面介绍的定位算法,衍生出了多种室内定位技术。
目前的定位技术多要借助辅助节点进行定位,通过不同的测距方式计算出待测节点相对于辅助节点的位置,然后与数据库中事先收集的数据进行比对,从而确定当前位置。
室内定位主要流程为首先在室内环境设置固定位置的辅助节点,这些节点的位置已知,有的位置信息是直接存在节点中,如射频识别(RFID)的标签,有的是存在电脑终端的数据库中,如红外线、超声波等。
然后测量待测节点到辅助节点的距离,从而确定相对位置,使用某种方式进行测距通常需要一对发射和接收设备,按照发射机和接收机的位置大体可以分为两种:一种是发射机位于被测节点,接收机位于辅助节点,例如红外线,超声波和射频识别(RFID);另一种是发射机位于辅助节点,接收机位于被测节点,例如WiFi、超宽带(UWB)、ZigBee。
室内定位技术对比下面具体介绍八种室内定位技术所涉及原理与优缺点。
一、WiFi定位技术,定位方法是场景分析法,其定位精度由于覆盖范围的不同,可以达到2-50m。
优点是易安装、系统总精度相对较高,缺点是指纹信息收集量大、易受其他信号干扰。
二、视频识别(RFID)技术,定位方法是临近信息法,其定位精度在5cm-5m之间。
无人机航线布设方法实验报告
无人机航线布设方法实验报告1 明确航测范围航线规划软件(地面站)的参考底图数据大多来源于谷歌地图。
规划航线之前,有必要在Google Earth中确定项目航飞范围,了解测区地貌,并进行合理的飞行架次划分,优化航飞方案,提升作业效率,避免撞机事故发生。
2 确定航高作业前应了解测区的地形地貌,判断所在测区的建筑高度情况,在安全飞行的前提下,规划飞行高度。
若有精度要求,则应根据地面分辨率,计算相对航高。
3 重叠度确认重叠率指的就是两张照片之间重叠的部分。
重叠率分为旁向重叠率和航向重叠率。
旁向重叠率,航空摄影中,沿两条相邻航线所摄的相邻像片上有同一地面影像部分。
两相邻航带之间的重叠称为旁向重叠。
(简而言之,就是线路与线路之间照片的重叠部分)航向重叠率,由于相邻像片是从空中不同位置拍摄的,故重叠部分虽是同一地面,但影像不完全相同。
沿航向重叠部分与像片长度之比,称为“航向重叠度”,以百分数表示。
(简而言之,就是同一条线路,照片与照片之间的重叠部分)在实际作业中,我们设定的重叠度一般为:航向80%,旁向70%。
根据不同环境下的纹理情况,可以适当增大或减小。
4 掌握天气情况无人机航测作业前,要掌握当前天气状况,并观察云层厚度、光照强度和空气能见度。
正中午地面阴影最小,在日出到上午9点左右,下午3点左右到日落的两个时间段中,光照强度较弱且太阳高度角偏大,部分测区还可能碰到雾霾。
这些情况可能导致采集到的建筑物背阳面空三匹配精度差,纹理模糊且亮度很低,最终影响建模效果,严重影响视觉观感。
5 地面站使用步骤1)打开地面站软件,注册账号并登录2)规划航线:地面站电脑要求联网操作,打开地面站,点击规划,开始规划航线并保存航线到云端。
6 正常情况下,理想的航线设计一般具备以下特征①测区的形状呈现规则,航向基本朝一个方向;②航向高度相同;③地面重叠率一般为:航向重叠80%和旁向重叠75%;④测区内没有困难的地形地貌,如森林、雪地、水域等等,因为在这些地貌覆盖下相片不能很好地进行匹配。
无人机地面控制站软件通用化研究
现代电子技术Modern Electronics TechniqueOct. 2023Vol. 46 No. 202023年10月15日第46卷第20期0 引 言地面控制站是无人机[1⁃4]系统控制的核心,可以完成对无人机的视距和超视距控制,它作为无人机系统控制的核心,在无人机系统的任务准备阶段、关键任务执行阶段直到最后的事后分析阶段都承担着重要工作。
地面控制站完成对无人机的控制,监视无人机的飞行状态和有效载荷的工作状态,实现对无人机的远距离操纵以及信息的实时监视、记录、分发[5⁃10]。
它的核心功能主要由软件系统实现,一般包括任务规划、飞行监视与控制、任务载荷监视与控制、链路监视与控制、综合数据管理和情报分发等。
任务规划的功能是:接收下达的无人机侦察任务,生成无人机侦察计划;根据飞行侦察任务的要求,制定出若干条可能的飞行航线,并生成相应的航线装订数据;同时依据接收到的无人机位置信息,在数字地图背景下绘制飞行轨迹。
飞行监视与控制的功能是:实现对无人机的操纵和监视,完成无人机飞行控制指令生成和发送,完成无人机遥测数据的接收和监视。
使操作员在操作席位上可DOI :10.16652/j.issn.1004⁃373x.2023.20.018引用格式:何文志.无人机地面控制站软件通用化研究[J].现代电子技术,2023,46(20):95⁃100.无人机地面控制站软件通用化研究何文志(中国电子科技集团公司第五十四研究所, 河北 石家庄 050081)摘 要: 无人机地面控制站作为无人机系统的核心,主要功能包括任务规划、飞行监视与控制、任务载荷监视与控制、链路监视与控制、综合数据管理和情报分发等。
经过多年建设,我国无人机地面控制站运用体系已初步形成,但仍然存在各型号无人机地面控制站不通用的问题。
软件系统是地面控制站的核心,同样面临如何实现通用化的问题,通过分析地面控制站的软件通用化技术途径,利用“通用模块+专用模块”的设计思路,建立基于数据分发服务(DDS )的地面控制站软件架构,给出一种通用的软件模块划分方法。
基于C#的无人机地面站软件设计

基于C#的无人机地面站软件设计绿色质量观察作者简介:杨青(1992-),男,硕士研究生,主要研究方向为嵌入式开发及上层应用开发。
基于C#的无人机地面站软件设计Design of UAV Ground Station Software System Based on C# 杨青,赵锋,李阳(电子科技大学电子工程学院,四川成都611731)Yang Qing,Zhao Feng,Li Yang (University of Electronic Science and Technology of China,School of Electronic Engineering,Sichuan Chengdu 611731)摘要:无人机在民用领域的应用近年来日益广泛,如航拍、电力巡线、农业生产等,其应用的多样化也对无人机各方面性能提出更高的要求,如远距离作业飞行、任务载重、高清图像传输等。
无人机地面站系统作为无人机系统的地面端具有至关重要的作用,主要完成无人机状态监控及飞行控制。
因此,对无人机地面站系统相关技术的研究及功能的实现对工程实践和行业应用具有重要意义。
该文基于科研项目主要完成基于小型工业无人机的地面站软件系统的设计与实现,地面站控制软件根据功能模块从软件界面、状态监控、指令控制、数据通信、数据存储等几个方面进行设计,通过Visual Studio 2013编译环境基于.Net 平台采用C#语言编程实现,其中电子地图的显示基于/doc/d5167881.html, 控件实现,无人机飞行姿态虚拟仪表控件基于GDI+绘图实现,数据通信模块采用多线程串口读写操作。
关键词:无人机;地面站软件;/doc/d5167881.html,;数据通信中图分类号:V279文献标识码:A 文章编号:1003-0107(2017)05-0048-05Abstract:UAV has been widely used in the field of civilian applications in recent years,such as aerial survey,electricity inspection,agricultural production.Its application of diversification of all aspects of UAV performan-ce also put forward higher requirements,such as long-distance operations flight,task load,high-definition i- mage transmission and so on.As the UAV system on the ground side,UAV ground station system has a cru-cial role,mainly to complete the UAV status monitoring and flight control.Therefore,the research of the relatedtechnology and the realization of function of UAV ground station system is of great significance to engineeri-ng practice and industry application.Based on the research this paper mainly carried out the design and im-plementation of the ground station system of small industrial unmanned aerial vehicle (UAV).Ground control s-oftware were design according to the function module from the software Interface,state monitoring,instruct-ion control ,data communication and data storage ,which was realized by using C#in Visual Studio compiler e-nvironment based /doc/d5167881.html, platform.Electronic map display was achieved based on /doc/d5167881.html, control,virtual i- nstrument control of the flight attitude was achieved based on GDI+graphics.T ata communication module w-as achieved by multi-threaded read and write operations.Key words:UAV;ground station software;/doc/d5167881.html,;datacommunicationCLC number:V279Document code:A Article ID :1003-0107(2017)05-0048-050引言近年来,无人机在民用市场发展较快[1-2],尤其在农业生产、灾害预警、遥感遥测和航拍等方面应用火热[3-4],因此根据无人机的广泛应用对无人机系统及其组成部分进行研究很有必要[5]。
民用无人机驾驶员口试指南(教员)
民用无人机驾驶员口试指南教员适用(教员题目包括所有机长驾驶员题目的更深层次回答;以下参考指南内容为交互形式,不完全按照大纲分类;直升机与固定翼专用试题将会标出,其他题目三大类飞行器通用。
)备注:该指南中题目仅供民用无人机驾驶员训练机构内部参考学习,题目仅为口试题型的体现,具体口试题目由组织考试的飞行检查委任代表提供,本口试指南自2017年1月1日起生效。
第一部分:控制站部分(同时含遥控器及链路)1.列举两种以上地面站软件设计与使用上的异同?答:APM地面站、大疆地面站、零度地面站、纵横地面站、UP地面站等,具体略。
2.结合起降遥控器说说民用无人机系统都有那几条链路?各条链路作用,常用频率、功率、范围?答:第一问答案要点: 遥控器上行、图传下行、数传上下行。
第二问答案要点: 遥控器视距内指令上行,2.4G,0.5W,1KM;图传超视距任务图像下行,2.4G、5.8G,1W,2KM 全向天线、10KM定向天线;数传超视距指令上行、飞参下行,900M,1W,2KM全向天线、10KM定向天线。
3.简述民用无人机地面控制站所有天线的类型、方向图、增益大小、架设或布置方式、连接何设备?答:要点:A各长度鞭状天线,全向,苹果型方向图,2-6DBI,与通讯方向垂直,遥控器、机载数传。
B各尺寸蘑菇头、三叶草、四叶草天线,全向,柿子饼型方向图、5-10DBI,与通讯方向垂直,机载图传、地面图传。
C八木、平板、螺旋天线,定向,30度圆锥体型方向图,8-18DBI,与通讯方向同向,远距离地面图传数传。
D抛物面天线(锅),定向小范围,手电筒光型方向图,20DBI以上,与通讯方向同向,超远距离图传数传。
4.futaba14通道起降遥控器与精灵起降遥控器有什么区别?各有什么注意事项?答:第一问答案要点: FUTABA可独立编程设置;精灵油门杆是回位的,双天线,只能人工修正、其上可卡视屏屏幕。
第二问答案要点: 现场解释,略。
5.简述GPS技术基本原理?答:答案要点:各星与地面GPS接受机都有统一的标准时间,各星向外广播发送这个时间及本星的位置(星历),地面GPS接受机根据收到的各星位置与时间差反推计算出自己的位置。
无人机的技术和实现方法
无人机的技术和实现方法随着技术的不断发展,无人机已经成为了众多科技领域中的高峰之一。
无人机的使用范围也不断扩大,从最初的军事用途,到如今的航拍、物流等多个领域。
在本篇文章中,我们将探讨无人机的技术和实现方法。
一、通用的无人机技术无人机的技术包括飞行控制系统、电力系统、传感器、数据传输系统、地面站等几大方面。
其中,飞行控制系统和电力系统是无人机最基本的两个部件,而传感器和数据传输系统是实现无人飞行的关键要素。
飞行控制系统主要包括控制板、惯性导航系统、GPS及姿态传感器等。
控制板是整个飞行控制系统的核心,负责处理各类信号,保证飞行的平稳。
惯性导航系统是无人机飞行的关键要素之一,它可以通过加速度计、陀螺仪等传感器测量飞行器的速度、角速度及姿态,从而实现飞行路径的控制。
GPS可以实现无人机的定位,而姿态传感器能够实现无人机飞行的稳定。
电力系统则是无人机的“心脏”,负责提供无人机所需要的能量。
内置的电池主要用于驱动电机和其他关键元件。
其常见的电池种类包括锂聚合物电池、锂离子电池等,这些电池不仅具有较高的能量密度,同时也有着较高的安全性。
无人机必须配备传感器和数据传输系统,才能实现无人机飞行的功能。
传感器主要用于探测周围环境的状态,例如高度、速度、温度、湿度等。
数据传输系统则用于将采集来的数据传输至地面站,实现实时的数据处理和分析。
通过合理地设计和配置这些传感器和数据传输系统,无人机可以指导、控制地完成各种任务。
二、无人机实现方法无人机的实现方法主要包括通过遥控、全自主或混合控制方式控制飞行器。
这些方法的不同点在于,它们依赖于不同的控制方式,从而实现无人机飞行的最佳方案。
遥控飞行器是最简单和最常用的无人机控制方式之一。
该方式采用手控器控制无人机飞行,由人类操作设备来控制无人飞行器。
遥控飞行器通常具备稳定的飞行性能和高度可定制性,但是需要技术人员操控无人机。
全自主飞行器是一种在没有操作员的情况下执行任务的无人机,其控制方式主要依托于飞行控制系统、传感器和数据传输系统等关键要素。
小型无人机地面站的研究与设计
The software of the ground station, running under PC windows, receives the UAV flight telemetry data packets through the RS232 port of the radio data-transmission, respectively displays the location, track, heading, altitude, speed, three-axis attitude data and other flight status data through the map window and air meters window, and further keeps data in the flight database for subsequent playback and analysis. In order to facilitate software debugging and testing, programs for hand-online editing, automatic generation and data files acquisition are designed too.
大疆对比开源算法
大疆对比开源算法标题:无人机视觉算法对比分析摘要:本文对市场领先的无人机制造商大疆和开源算法进行了对比分析,旨在探讨它们在视觉算法领域的异同。
分析结果表明,大疆作为一家领先的无人机公司,采用了一系列优秀的商业算法,而开源算法则提供了更加灵活和自由的选择。
一、背景介绍无人机技术近年来迅猛发展,视觉算法作为其中的重要一环,对无人机的导航、避障和目标识别等方面起到关键作用。
大疆作为全球领先的无人机制造商,一直致力于研发和应用创新的视觉算法。
开源算法由于其开放性和许可协议的自由性,也逐渐成为无人机视觉算法领域的重要力量。
二、算法比较2.1 大疆算法大疆在无人机视觉算法方面拥有多项专利和先进技术。
其算法具有以下特点:- 高效准确:大疆的算法经过大量实机测试和优化,具有较高的准确率和处理速度。
- 基于深度学习:大疆的算法使用深度学习技术,可以进行复杂的目标检测和跟踪。
- 高度集成:大疆的算法与其硬件设备紧密结合,实现了高度的系统集成和协同工作。
2.2 开源算法与大疆的闭源算法相比,开源算法具有以下特点:- 自由度高:开源算法可以被自由地使用、修改和分发,适合对算法进行个性化开发和优化。
- 稳定性待提升:开源算法的稳定性和可靠性相对较低,需要用户自行测试和优化。
- 社区支持:开源算法使用者可以依靠全球开源社区的支持和共享资源,获得更多学习和技术交流机会。
三、应用场景大疆的算法主要应用于大疆的无人机产品中,适用于各种商业和消费级别的应用场景,如航拍、农业植保、安防等。
开源算法则被广泛应用于无人机实验与研究、教育和个人制作等自定义场景。
四、结论大疆的闭源算法具有高效准确和高度集成的特点,适用于需求较高的商业应用;而开源算法则具有自由度高和社区支持的优势,适合对算法进行个性化开发和优化。
在选择无人机视觉算法时,用户应根据自身需求和应用场景进行选择,并充分利用开源社区资源和大疆的技术支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
是 系 统 建 设 中 的关 键 和 能 动性 因 素 .直 接 影 响 和协 调 其 他 几 个 组 成 部 分 。同时 也 具 备 着 五 种 类 型 的 功 能 : 数 据 采 集 与 编 辑 功 能 、 间 分 析 功 能 、 图 功 能 、 间 数 空 制 空
据 库 管 理 功 能 、 迹 回放 再 现 功 能旧 GI 其 他 几 种 信 航 S与 息 系统 密 切 相 关 .但 由 于其 处 理 和 分 析 地 理 数 据 的 能
时显示 , 使操作者可 以直观地得到无人机的信 息。 航迹
显 示 过 程 中还 需 保 存 相 应 的数 据 .以便 在 航 迹 再 现 模 式 中使 用 为 了使 无 人 机 能够 实现 自主飞 行 , 要 提 前 需 进 行 任 务 航 线 规 划
统 ) 获 取 、 储 、 析 和 管 理 地 理 空 间 数 据 的 重 要 工 是 存 分 具 .近 年 来 受 到 了广 泛 的关 注 和迅 猛 发 展 理 论 上 来 说 . I 以运 用 于 现 阶段 的任 何 行 业 .是 以地 理 空 问 GS可 数 据 为 操 作 对 象 . 于数 据 库 管 理 系 统 ( B ) 析 和 基 D MS 分
用 串 E通 信 来 实 现 每 个 串 口既 能 发 送 数 据 也 能 接 收 l
接 收 来 自机 载 电台 发 回 的实 时 数 据 .又 要 实 现 对 无 人
数据 . 是一个全双工 的通信工作方式 . 以实现遥测数 可
据 接 收 和 遥 控 指 令 发 送 的功 能 根 据 实 际 项 目的任 务 要求 . 当无 人 机 进 行 实 际 飞 行 时 . 机 的实 际航 线 是 否 飞 与 规 划 的航 线 重 合 或 偏 离 .航 线 的 距 离 到 底 有 多 大 的
{
Va i n i p ra t n =m
_ _
管理空间对象的信息系统
G S系 统 由硬 件 、 件 、 I 软 数据 、 员 和方 法 五 部 分组 人
成 硬 件 和软 件 为 地的 重 要 内容 : 法 为 GI 设 提 供 解 决 方 案 : 员 I 方 S建 人
节 通 过 无 线 电 数 据链 . 面 站 的航 迹 显示 实 时 获 取 由 地 自动 驾 驶仪 中传 来 的 G S 测 信 息 . 电 子地 图 上 实 P 遥 在
2 基 于 GI S实 现 无 人 机地 面导 航 系统 设 计
G S( e ga hc Ifr t n S se I G o rp i nomai ytm.地 理 信 息 系 o
c l C mm O G t p t) t MS o C M. eI u( ; r n
/读 缓 冲 区 /
S f a ry i =v ra t i p; a e ra np a in n
_ _
力 有 所 区别 .尽 管 没 有 硬 性 和快 速 的 规 则 给 信 息 系 统
分类 . 但可 以帮助 区分 G S和桌 面制图 、 I 计算机 辅助设
误 差 是 非 常 重 要 的 .所 以 航 迹 显 示 是 一 个 很 重 要 的环
机 进 行 远 程 控 制 .因 此 要 同时 用 到 串 口 的发 送 和 接 收 功能。 i aC + Vs l + 实现 串行 通 信 的方 法 . 以用 A t e u 可 cvX i 控 件 . 成 某 个 任 务 或 一 组 任 务 . 高 了 编 程 的 效 率 和 完 提 可 靠 性 。
12 功 能 的 实现 .
串 口通 信 的数 据 接 收功 能 比较 容 易 实 现 。在 工 程 中建 立 ltbx显示 数 据 。 发 中 断 , 收 数 据 。编 程 i o s 触 接
实现如下 :
Im cr C m C M.eC mm vn= ) f _ tMS o m O G to E e t2 ( l / 件 值 为 2时 表示 接 收 缓 冲 区 内有 字 符 / 事
21 任 务 设 计 .
使 用 G S时结 合 无 人 机航 路 规 划 、 迹 显 示 、 I 航 图形 数 据 的导 入 与 导 出 、 图 的显 示 、 计 分 析 等 功 能 。 系 地 统 统 硬 件 由无 人 机 、 面 站 和 载 体 三 部 分 构 成 , 过 无 线 地 通 通 信 相 连 无 人 机 与 地 面 站 通 过 无 线 电传 输 , P 定 位 GS 数据 、 行状态参 数和指令 等数据 ; 过 以太 网通信 , 飞 通
}
计 C D、 感 、 MS、 A 遥 DB 以及 GP S技 术 嘲 系 统 的 目标 是 。
U d t a (A S ) , 新 编 辑 框 内 容 p a D t F L E) / e a ;更
使 地 面测 控 系 统对 无 人 机 的综 合 应 用 管 理 从 单 一 的手 工 劳 动 . 过 引 入 通 用 信 息 处 理 开 发 平 台 , 成 一 个 安 经 形 全 可 靠 、 捷 便 利 的 信 息 化 系 统 , 大 限度 地 利 用 人 力 快 最 和信 息资 源
数 据 发送 过 程 中 .需 要 注 意 发 送 数 据 所 要 采 用 的 格 式 . 且 需 要 单 独 编 写 数 字 转 换 程 序 , 换 程 序 的 主 并 转
体 部分 如下 :
F rn i0 il ; o( t= ; e ) i <n f
He d t=C0 v nH e x aa ne xCh r a:
从 地 面 站 获 取 得 到 的无 人 机 各 种 状 态 的 数 据 ,并 在 电
L wh x a a C n e H x h r o e d t= o v r e C a;
s n dt【 x a ln ( a)edt ed aa ed t e] c r x a ; h a =h h a