基于嵌入式PC的机器人光电寻线系统
嵌入式系统的Arduino
嵌入式系统的ArduinoArduino是一款开源的电子原型平台,旨在为工程师、艺术家、设计师和爱好者提供一个简单易用的工具。
Arduino平台包括硬件和软件,可以用来创建基于嵌入式系统的交互式项目。
一、Arduino板Arduino板是Arduino平台的核心硬件,它是一个小型的电子计算机,具有数字输入输出、模拟输入输出、通信接口等功能。
它支持多种传感器和执行器,并可以与其他设备通信,如计算机、蓝牙模块、GPS模块等。
Arduino板通常包括一个主控芯片,例如ATMega328p或ATMega2560等。
这些主控芯片具有多个引脚,可以用来连接其他组件。
Arduino板还包括一些基本组件,例如电阻、电容、晶体管等。
这些组件可以用于构建电路,或者与其他组件配合使用。
Arduino平台的优点之一是其低成本。
Arduino板可以在大多数电子零售商处购买,价格通常在20美元以下。
这使得Arduino成为一款受欢迎的嵌入式系统平台,可以在许多学校和机构中使用。
二、Arduino软件除了Arduino板之外,Arduino平台还包括一个软件平台,可用于编写Arduino程序。
Arduino软件包括一个集成开发环境(IDE),它提供了一个代码编辑器、编译器和上传工具,可以将程序上传到Arduino板上。
Arduino IDE使用基于C语言的Arduino编程语言,该语言已经被大量简化和修改,以便使其更易于理解和使用。
该语言有许多常用函数和库,例如DigitalWrite()、Delay()、Serial.print()等。
这些函数和库可以与Arduino板上的组件配合使用,从而创建各种不同的项目。
Arduino软件平台还包括一个在线社区,其中包括数以千计的Arduino用户和创作者。
这个社区被广泛用于讨论问题、分享代码和提供教程。
由于Arduino的开源性,用户可以自由使用和修改社区内的项目,也可以将自己的项目分享给其他人。
基于PC/104总线的嵌入式气动机械手控制器研究

控制 总线 , IE 被 E E协会定义为 IE .9 6 1P /0 E EP 9 . ;C 14 总线是 IA总线 的简化版 , S 它针对嵌入式系统的特殊
7F 5 型低摩擦直程气缸驱 动 , 得大臂可以 围绕肩关 使
作者简介 : (91 )男 , 王伟 18一 , 北京人 , 士 , 硕 主要从 事流体 传
动与控 制和嵌入式控制 系统 方面的科研工作 。
维普资讯
液压与 气动
—
20 年 第 2 07 期
编码器转换为正交编码信号 , 再分别经 由方 向识别单
}
鸡
苫
b
厶
tP/4 C1 U 0 —l /模块 h A D
- -
元 E 3WF C转换为单路计数脉 冲和高低 电平方 向 6一 5 标识信号 , 回计数器模块 。 并传
3 液 晶触摸屏 )
耐 数器模块『
用以实时测量大 、 小臂的空间角度。在小臂末端 嵌入式控制器 , 以液晶触摸屏作为输入装置 , 并辅 实现 码器 , jB . 5 了人手在触摸屏上写字或作图的同时气动机械手实时 垂直于 白板作图平 面方 向安装 c 2 61R直程气缸 , 并在其活塞杆上固定一支软笔以实现 白板作 图时落笔 跟踪输入量进行 白板书写或作 图的功能。 2 气动机械手结构 如图 l 所示 , 这是一台由我校 自动控制 系 自主研 发的四 自由度回转关节型气动机械手 。该机械手由底 座、 腰部 、 大臂 、 小臂和手腕组成。底座 中的腰部摆缸 驱动转盘可使 整个机械手在绘 图位与停止位 之间作 9。 o 转动, 实现位 置切换 。为 了减 小机 械手本身 的质 量, 、 大 小臂均采用受力状况 良好的空心细圆柱形钢管 制成。大 、 小臂分别 由 C B 0 0 M2 4 —10和 C IQ 3 — IZ C 2 V
基于嵌入式系统的机器人互联应用设计
基于嵌入式系统的机器人互联应用设计近年来,随着嵌入式技术的快速发展,嵌入式系统越来越多地应用于现代智能机器人的设计与制造行业。
基于嵌入式系统的机器人互联应用是一种新的技术趋势,它可以实现多种机器人之间的互联互通、数据共享和智能控制,具有广泛的应用前景。
一、嵌入式系统在机器人中的应用嵌入式系统是一种专门用于嵌入式设备中的现代微处理器系统。
在现代机器人中,嵌入式系统被广泛应用于机器人控制、图像处理、运动控制和算法处理等方面。
基于嵌入式系统的机器人系统可以实现高速运动控制、多路视频和数据采集、分布式数据处理、远程控制和智能决策等功能。
二、嵌入式系统的优势和不足1.优势嵌入式系统具有小巧、节能、高效和可靠等优势。
通过对机器人的设计和优化,可以有效地提高机器人的运行速度和稳定性。
在机器人的控制和管理中,嵌入式系统可以实现实时响应、高速传输、远程控制和省电等功能,有效地提高机器人的工作效率和性能。
2.不足嵌入式系统通常具有较小的存储容量、RAM和处理器速度等限制。
这可能会限制机器人的某些功能和应用场景。
在机器人设计和制造中,需要根据机器人的应用需求和资源限制进行综合考虑,选择最适合的嵌入式系统方案。
三、基于嵌入式系统的机器人互联应用设计基于嵌入式系统的机器人互联应用设计可以实现多个机器人之间的协同工作,提高机器人系统的智能化和自适应性。
具体实现过程包括以下几个方面。
1.多机器人协同在多机器人协同控制中,需要将多台机器人连接在一起,并通过统一的嵌入式系统进行统一控制。
通过实时采集机器人的数据和反馈信息,可以实现机器人之间的协同运动控制和位置调整,提高机器人工作效率和稳定性。
2.远程控制通过网络技术和嵌入式系统,可以将机器人连接至远程服务器并进行远程控制。
这样可以实现远程操作、监控和控制机器人的位置、运动和状态等信息。
远程控制可以为机器人提供更加便利的操作和管理功能,提高机器人的智能化和自适应性。
3.智能决策通过分布式嵌入式系统,可以实现机器人的智能决策和自主控制。
基于ARM的嵌入式移动机器人控制系统的设计
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
未知环境下的机器人地图构建研究
未知环境下的机器人地图构建研究摘要地图构建技术是机器人自主导航研究中的一个关键问题。
为了实现机器人在未知环境下的自主导航,本文在分析当前普遍采用的一些环境构建方法及其缺点的基础上,提出一种基于多传感器信息融合的地图构建方法。
实验结果表明该方法有效地克服了传感器的累计误差,有效地提高了构建环境地图的准确性。
此方法的可行性和有效性通过pioneer3-dx移动机器人得到了实验验证。
关键字机器人;地图构建;多传感器信息融合;扩展卡尔曼滤波中图分类号tp24 文献标识码a 文章编号1674-6708(2011)54-0200-020 引言导航技术是自主移动机器人研究的核心,其关键在于建立一个合理有效的环境地图[1],用来描述机器人的工作环境,从而进行路径规划和避障,所以构建并维护一个环境地图是自主机器人能否顺利完成工作的前提和重要环节,构建环境地图的精确程度直接影响到机器人后续的工作状态。
典型的环境地图表示方法有尺度地图,拓扑地图。
但其准确性都受限于传感器的不确定性,无论何种环境地图都依赖于传感器提供的环境信息,即构建环境地图的精度取决于所采用的传感器。
机器人自身携带的传感器是其探索周围环境的重要手段。
当前,常用的传感器有视觉传感器、里程计和惯导系统、超声波传感器、激光测距仪、gps定位系统等。
针对不同的传感器,各有其使用优缺点及局限性[2][3],为此,经过分析比较,本文采用扩展卡尔曼滤波技术,将里程计和超声波传感器所提供的信息进行融合,实现构建准确的环境地图。
1 环境信息的检测与提取1.1 里程计模型的建立与信息处理通过里程计的测距工作原理,建立其位移数学模型:(1)其中,r为车轮半径,n为光码盘输出的脉冲数,p为光电码盘转数。
若机器人左右轮的移动距离分别为和,且两轮的间距为b,机器人从位姿运动到,则机器人运动的距离为,机器人转过的角度为。
1.2 超声波传感器模型的建立与信息处理通过超声波测距的工作原理,建立其测距数学模型:(2)其中,t为发射和接收声波所用的时间,c为声音传播速度。
嵌入式系统课程设计题目

嵌入式系统课程设计题目1.ARM系统在LED显示屏中的应用(利用ARM系统控制彩色LED显示屏)2.ARM-Linux 嵌入式系统在农业大棚中的应用(温度、湿度和二氧化碳浓度是影响棚栽农作物生长的3 大要素。
为了实现农业大棚中这3 种要素数据的远程实时采集,引入了当前嵌入式应用中较为成熟的ARM9 微处理器和Linux 嵌入式操作系统技术, 采用温度传感器PH100TMPA、湿度传感器HM1500 和二氧化碳浓度传感器NAP221A ,设计一种基于TCP/ IP 协议的嵌入式远程实时数据采集系统方案。
从硬件设计和软件实现2方面对该系统进行具体设计。
)3.ARM 嵌入式处理器在智能仪器中的应用(设计一种基于ARM 嵌入式处理器系统的智能仪器的硬件和软件设计方案, 并结合uc/o s2II或者Linux嵌入式实时操作系统, 给出一套完整的任务调度和管理的方法, 最后用实例说明)4.ARM系统在汽车制动性能测试系统中的应用(采用ARM系统构建一个路试法的汽车制动性能测试系统)5.ARM 嵌入式控制器在印染设备监控中的应用(针对拉幅热定型机,设计一种基于485 总线的分布式监控系统。
用ARM 嵌入式控制器实现主、从电机的同步运行和烘房温度的控制;在PC 机上用VB6. 0 设计转速和温度的监控画面;实现ARM、变频器和PC 机之间的数据通信。
)6.基于ARM系统的公交车多功能终端的设计(完成电子收费、报站、GPS定位等功能)7.基于ARM9的双CAN总线通信系统的设计(设计一种基于ARM9内核微处理器的双路CAN总线通信系统。
完成系统的总体结构、部分硬件的设计,系统嵌入式软件的设计,包括启动引导代码U - boot、嵌入式L inux - 操作系统内核、文件系统以及用户应用管理软件四个部分。
)8.基于ARM9 和Linux 的嵌入式打印终端系统(嵌入式平台上的打印终端的外围电路连接设计、嵌入式Linux 的打印机驱动程序开发和应用程序的开发)9.基于ARM 的车载GPS 终端软硬件的研究(重点研究基于ARM 的导航系统的软硬件设计)10.ARM系统在B超系统中的应用(完成系统软件硬件设计,包括外围电路)11.基于ARM 的嵌入式系统在机器人控制系统中应用(提出一种基于ARM、DSP 和arm-linux 的嵌入式机器人控制系统的设计方法, 完成控制系统的功能设计、结构设计、硬件设计、软件设计)12.基于ARM的视频采集系统设计(完成系统软件硬件设计,包括外围电路,采用USB接口的摄像头)13.基于ARM的高空爬壁机器人控制系统(构建一种经济型的爬壁机器人控制平台, 与上位机视觉定位和控制系统结合,使其适用于导航与定位、运动控制策略、多机器人系统体系结构与协作机制等领域。
嵌入式系统在机器人控制中的应用研究

嵌入式系统在机器人控制中的应用研究引言:随着科技的迅速发展和人工智能的逐渐成熟,机器人技术在各个领域中得到了广泛的应用。
而在机器人控制系统中,嵌入式系统的应用起到了至关重要的作用。
本文将介绍嵌入式系统在机器人控制中的应用,并探讨其在提升机器人性能和功能中的优势。
一、嵌入式系统概述嵌入式系统是一种集成电路、计算机技术和软件工程等多学科交叉的技术,其主要特点是小型化、低功耗和实时性强。
嵌入式系统将计算机硬件、软件和相关的固定功能模块融合在一起,使得设备具备处理和控制功能,并能根据外部环境实时作出响应。
二、嵌入式系统在机器人控制中的应用1. 实时控制嵌入式系统具有出色的实时性能,能够实时获取和处理传感器的数据,并迅速作出响应。
在机器人控制中,嵌入式系统可以实时监测和控制机器人的运动、感知和决策等。
例如,在机器人导航中,嵌入式系统可以根据传感器的数据进行实时路径规划和动态避障,确保机器人安全、高效地行走。
2. 硬件集成机器人通常包括多种传感器和执行器,嵌入式系统可以将这些硬件集成在一起,实现机器人的全面控制。
嵌入式系统通过接口和总线连接传感器和执行器,以实现对机器人各种功能的控制。
例如,通过嵌入式系统的集成,机器人可以准确地感知环境中的温度、湿度、光照等信息,并相应地作出调节和控制。
3. 多任务处理嵌入式系统具有较强的多任务处理能力,能够同时处理多个任务并保证各个任务的实时性和稳定性。
在机器人控制中,有许多任务需要同时进行,如传感器数据处理、运动控制、决策和通信等。
嵌入式系统可以通过任务调度和优先级管理,合理分配资源,确保机器人多任务运行的效率和稳定性。
4. 系统可扩展性嵌入式系统具有较高的可扩展性,可以根据机器人的需求进行定制和升级。
例如,如果机器人需要增加新的功能或传感器,可以通过增加相应的硬件和软件模块来实现。
嵌入式系统的可扩展性使得机器人具备了不断适应和发展的能力,提升了其在不同应用场景中的适应性和灵活性。
巡线机器人

巡线机器人1. 简介巡线机器人是一种用于自动检测和跟踪线路的机器人。
它能够根据预先设定的轨迹沿着线路行进,并通过感应器检测线路上的信号,从而实现自动导航和定位。
巡线机器人广泛应用于工业生产、物流仓储、智能家居等领域,可以大大提高工作效率和减少人力成本。
2. 工作原理巡线机器人主要由以下几个组件组成:•轮子和驱动系统:用于机器人的行进和转向控制,使其能够沿着线路行进。
•感应器:通常采用光电传感器或红外传感器,用于检测线路上的信号。
•控制系统:根据感应器的信号,控制机器人的行进、转向和停止等动作。
•电源系统:提供机器人所需的电力供应。
当巡线机器人开始工作时,它会首先通过感应器检测线路上的信号。
在典型的情况下,巡线机器人会跟踪黑线或者其他颜色对比鲜明的线路。
感应器会收集到的信号传送给控制系统,控制系统会根据信号做出相应的控制动作。
例如,当感应器检测到线路上的信号较强时,控制系统会调节机器人的转向角度,使其维持在线路上行进;当感应器检测到线路的信号较弱或者不存在时,控制系统会使机器人停止行进或者采取其他动作。
3. 应用巡线机器人在各个领域都有广泛的应用。
以下是几个常见的应用场景:3.1 工业生产巡线机器人可以用于工业生产线上的物料运输和搬运。
通过预先设定的轨迹,巡线机器人可以自动从仓库中将物料运送到生产线上,提高生产效率和减少人力成本。
在一些特定的生产环境中,巡线机器人还可以通过感应器检测到环境中的障碍物,并及时避开,确保安全生产。
3.2 物流仓储巡线机器人也可以用于物流仓储环境中的货物搬运和库存管理。
通过感应器和控制系统的配合,巡线机器人可以自动导航到指定的货架或货物位置,将货物送到指定的目的地或者完成库存盘点。
这为物流仓储业提供了一种更高效和智能的解决方案。
3.3 智能家居在智能家居领域,巡线机器人可以用于室内环境的清扫和维护。
通过预先设定的轨迹,巡线机器人可以自动在室内行走并清扫地面。
一些高端型号的巡线机器人还可以通过感应器检测到地面的脏污程度,并在需要的时候自动清洗。
嵌入式系统中的机器人控制技术研究

嵌入式系统中的机器人控制技术研究一、研究背景随着科学技术的不断发展和进步,人工智能技术得到了前所未有的迅速发展,其中机器人技术的发展更是激发了人们对于未来的向往。
嵌入式系统作为机器人技术的核心部分,扮演着非常重要的角色。
在机器人控制技术方面,嵌入式系统的进步是推进机器人技术不断发展的重要动力。
二、嵌入式系统中机器人控制技术的发展现状嵌入式系统是指嵌入在各种智能设备中的微型计算机系统。
在机器人系统中,嵌入式系统不仅是完成信息的处理和控制的设备,同时也是实现智能化与人机交互的媒介。
随着硬件和软件技术的不断进步,嵌入式系统的能力也在不断提升,从单一控制单元,逐渐发展为嵌入式操作系统、分布式控制系统、多线程控制系统等多方面的应用。
机器人控制技术从最初的简单的逻辑控制系统、以及现在的模块化控制系统,再到未来的深度学习、人工智能控制系统,不断演进发展。
现在,嵌入式系统在机器人控制技术中起着至关重要的作用。
在机器人控制技术发展中,嵌入式系统也逐渐成为了关键技术之一。
三、嵌入式系统中的机器人控制技术发展趋势(一)应用范围的扩大随着技术的不断发展和嵌入式系统的应用日益普及,机器人控制技术也进入了一个全新的发展阶段。
从最初的单一应用,逐渐拓展到智能制造、智能交通、医疗、物流、教育等众多领域。
未来,嵌入式系统在机器人控制技术中的应用会不断拓展,越来越多的领域会依靠嵌入式系统技术来推进重要的变革。
(二)控制精度和效率的提升在机器人控制技术发展中,控制精度和效率一直是嵌入式系统要解决的问题之一。
在企业的生产制造过程中,如何提高物料的流量和运行效率,有效提高生产效益也是嵌入式系统所需要解决的问题。
未来的机器人控制技术会注重提升控制精度和效率,这也会促进嵌入式系统技术不断地进化。
(三)智能化和自主化的融合随着人工智能的不断发展,机器人控制技术中也开始注重人工智能技术的整合。
在嵌入式系统中,智能控制算法的不断优化,以及智能学习技术的应用,将成为机器人控制技术不断发展的重要内容。
用于移动机器人的嵌入式系统设计与实现
用于移动机器人的嵌入式系统设计与实现移动机器人是现代自动化生产和服务领域中的重要组成部分,通过运用先进的嵌入式系统技术,可以为机器人的智能控制、信息处理和通讯传输提供强有力的支持,实现机器人的高效、精准和安全工作。
本文将针对移动机器人的嵌入式系统设计与实现进行探讨,主要从以下几个方面分析:一、移动机器人的嵌入式系统嵌入式系统是集成了计算、控制和通讯等多种功能的计算机系统,其特点是体积小、功耗低、性能高、稳定可靠,适合用于控制和监测等实时性强的场合。
移动机器人的嵌入式系统需要具备下列特点:1、高性能:支持多任务并行处理、高速计算和实时控制等功能,满足移动机器人的工作需求;2、低功耗:采用节能的硬件设计和优化的软件算法,确保嵌入式系统的长时间可靠运行;3、可靠稳定:采用防水、防震、防尘等物理保护措施,使用经过测试的软件和硬件组件,提高嵌入式系统的可靠性和稳定性;4、丰富接口:支持常见的通讯接口,如USB、RS232、以太网等,方便与其他设备进行数据交换和远程控制。
因此,移动机器人的嵌入式系统需要具备较高的计算速度、存储容量、通讯带宽和数据处理能力,同时考虑尺寸、重量和功耗等实际条件。
二、嵌入式系统硬件设计嵌入式系统的硬件设计是实现其高性能、低功耗和稳定可靠的关键步骤之一。
移动机器人的硬件设计需要考虑以下几点:1、选择适合的处理器:根据应用需求选择适合的嵌入式处理器,如ARM、Cortex-M等,并可以添加加速器、FPGA等外设扩展处理器的性能;2、核心电路设计:对处理器的供电电路、时钟电路和复位电路进行规划和布局,保证电源和信号的稳定和可靠;3、外设设计:根据需求添加各种外设,如USB、RS232、以太网、WIFI、蓝牙等,或者传感器、电机控制器、电源管理电路等;4、尺寸和布局:根据实际应用场景选择适当的尺寸和布局,考虑嵌入式系统的机械结构安装和接口导线布置等问题。
通过以上设计,可以实现移动机器人的嵌入式系统硬件上的优化。
基于嵌入式系统的智能机器人设计与实现
基于嵌入式系统的智能机器人设计与实现随着科技的不断发展,智能机器人的应用越来越广泛。
与此同时,嵌入式系统也逐渐成为机器人领域中的重要组成部分。
基于嵌入式系统的智能机器人,具有高性能、高精度、高可靠性等特点,已经应用于工业、医疗、教育等多个领域。
本文将介绍一种基于嵌入式系统的智能机器人的设计与实现方案。
我们选择了最常见的轮式机器人作为机器人的底盘,并使用了视觉和语音识别技术,实现了机器人的自主导航、目标搜索和语音控制等功能。
硬件设计硬件设计是机器人设计过程中的重要环节。
我们对机器人进行了部件的选择和嵌入式系统的设计。
1. 机器人底盘的选择机器人的底盘部分是机器人移动的关键,我们选择了常见的两驱轮式底盘。
这种底盘结构简单,易于控制,可以满足智能机器人的基本功能需求。
2. 单片机的选择我们选择了飞思卡尔公司的MK60DN512ZVMD10单片机作为控制器。
该单片机性能强大,同时兼顾了低功耗和高效能的特点,能够满足复杂的实时任务需求。
该单片机的主频为120MHz,内置2MB闪存和256KB的SRAM,可以满足机器人复杂控制算法的需求。
3. 视觉系统视觉系统是实现机器人自主导航和目标搜索的关键。
我们采用了USB摄像头,可以通过单片机的USB接口进行数据传输。
同时,我们还使用了OpenCV图像处理库,对图像进行处理和分析,可以对机器人周围的环境进行实时监测和识别。
4. 语音识别系统我们使用了基于云服务的语音识别系统。
机器人通过WiFi或3G网络连接到云服务平台,将语音数据上传到平台进行处理和识别,返回控制指令后机器人执行相应操作。
软件设计软件设计包括嵌入式系统的驱动程序设计和控制程序设计。
1. 嵌入式系统驱动程序设计我们首先对机器人各个部件进行了驱动程序的编写。
包括底盘驱动、电机控制、USB驱动、WiFi模块驱动等。
驱动程序的编写,对于整个机器人的控制和数据处理有着重要的作用。
2. 机器人控制程序设计机器人控制程序是实现机器人自主导航、目标搜索和语音控制等功能的核心。
机器人工程专业微机原理,嵌入式系统
机器人工程专业微机原理,嵌入式系统机器人工程专业微机原理,嵌入式系统是学习该专业的重要内容。
微机原理涵盖了微处理器、微控制器、微型计算机的基础知识和技术。
嵌入式系统则是实现机器人智能化的关键。
本文将从多个方面介绍机器人工程专业微机原理和嵌入式系统的相关知识,帮助读者深入了解和掌握这一领域。
一、微机原理的基本概念微机原理是学习机器人工程的基础,它涉及到微处理器和微控制器的工作原理、结构组成和性能特点。
微处理器是一种集成电路芯片,能够执行各种计算任务和控制功能;微控制器是一种具有控制功能的微型计算机,包含处理器、存储器和各种输入输出接口。
学习微机原理可以了解计算机硬件的基本原理和实现方式,为后续的嵌入式系统开发打下坚实的基础。
二、嵌入式系统的特点和应用领域嵌入式系统是指将计算机技术和其他技术融合在一起,用于控制、监测和操作各种设备和系统。
它具有实时性、可靠性和稳定性的特点,能够在有限的资源和环境条件下完成复杂的任务。
嵌入式系统广泛应用于机器人、自动控制、仪器仪表、通信设备、家电产品等领域,为这些设备赋予智能化的功能。
三、嵌入式系统的设计方法与技术嵌入式系统的设计涉及到硬件设计和软件开发两个方面。
硬件设计主要包括电路设计、信号处理和数据转换等技术,要求设计出高性能、低功耗、可靠性强的硬件平台;软件开发则涉及到嵌入式操作系统、驱动程序和应用程序的设计与开发,要求软件具有高效、可靠、易于维护的特点。
同时,嵌入式系统的设计还需要考虑系统的实时性、功耗控制和资源管理等问题。
四、机器人工程中的嵌入式系统应用在机器人工程领域,嵌入式系统扮演着重要的角色。
它可以实现机器人的感知、决策和执行功能,使其能够识别环境、分析信息、制定行动计划,并最终实现运动控制和任务执行。
例如,通过嵌入式系统的设计,可以实现机器人的自主导航、图像识别、运动规划等功能,使其能够在不同的环境下实现自主工作和协作操作。
五、发展趋势和挑战随着人工智能、大数据和物联网等技术的发展,嵌入式系统在机器人工程中的应用还将进一步扩展和深化。
基于嵌入式系统的自动化机器人控制

基于嵌入式系统的自动化机器人控制近年来,随着科技的飞速发展,嵌入式系统在自动化机器人控制中发挥着越来越重要的作用。
嵌入式系统是一种集成了电子硬件与软件的计算机系统,能够实时、稳定地与外部设备进行通信和控制。
在机器人控制中,嵌入式系统可以提供快速响应、高效运算和稳定控制的特性,大大提升了机器人的自动化程度和智能化水平。
首先,嵌入式系统为机器人提供了快速响应的能力。
在工业生产和日常生活中,机器人需要根据环境的变化和人类的指令来做出相应的动作。
传统的控制方法往往需要通过人工判断和指导,效率较低且易出错。
而嵌入式系统通过与机器人传感器的连接,能够实时获取环境信息,并以超高速的运算能力对数据进行分析和处理,使机器人能够在瞬间做出反应。
例如,在工厂流水线上,机器人需要根据传感器检测到的物体位置和距离来进行自动装配。
嵌入式系统能够快速计算出机器人下一步的动作,并精准地控制机械臂的运动轨迹,保证装配的准确性和效率。
其次,嵌入式系统可以实现高效运算,为机器人提供智能化的决策能力。
嵌入式系统内置了强大的处理器和操作系统,能够完成复杂的算法和任务。
在机器人控制中,嵌入式系统可以根据预设的逻辑和算法,进行数据处理、图像识别和路径规划等复杂的运算。
例如,在无人驾驶领域,嵌入式系统能够通过处理摄像头和雷达传感器获取的数据,识别出道路标线、车辆和行人等障碍物,并根据交通规则和导航系统做出相应的决策。
这种高效运算能力使机器人能够快速、准确地应对各种复杂的环境变化,提高了自动化和智能化程度。
此外,嵌入式系统在机器人控制中的稳定性也不可忽视。
嵌入式系统通常具有专门的硬件设计和实时操作系统,能够提供高度稳定和可靠的运行环境。
在机器人控制中,稳定性是非常重要的因素,因为任何不稳定的运算和控制都可能导致机器人发生意外或失控。
嵌入式系统通过硬件和软件的双重设计,确保了机器人控制的稳定性和可靠性。
例如,在医疗机器人中,嵌入式系统能够实时监测患者的生理参数并进行相应的治疗操作,确保了手术的安全和成功。
基于ARM嵌入式技术智能巡逻机器人
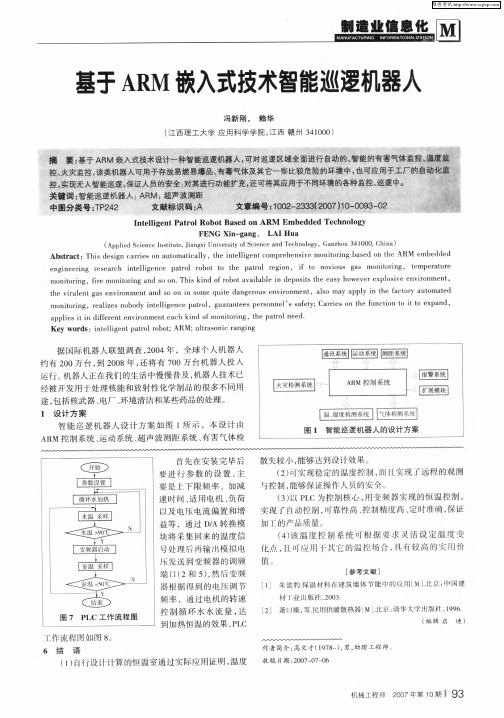
温度检测已经在超声波测距 系统中体现 ,这里 只介 绍湿度检测系统设计 , 本系统选用 电阻式湿度传感器 , 测 量 电路选用电桥 电路 。 振荡器对电路提供交流电源。 电桥 的一臂为湿度传感器 ,由于湿度变化使湿度传感器 的阻 值发生变化 , 于是 电桥失去平衡 , 产生信号输 出, 放大器
立即停止计 时。读取 当前计数器的值 t再根据超声波在 所示 。 ,
调用测距程序
●
调 用运 动控制程 序 调用火 灾检测程序
I
空气中的传播速度 , 就可以计算 出机器人距 前方障碍物 4 结 的距离 svt 。同时超声波在空气 中的传播速度受到当 =x/ 2
语
调用气体检测程序 调用湿度检测 程序
利 用 L C 14 P 2 2
处理 器内置 P WM
单元 ,结合外 围驱 可把不平衡信号加以放大 ,整流器将交流信号变成直流 动 电 路 组 成 P 信号 , WM 由控制
控 制 步 进 电机 移 动 系统 ,处 理 器 提 供 步进 电机 步进 脉 冲 给 。 , 端 端 输 入的 P WM 脉 冲 宽 器 D 转 换 器 采集 处 理 , 振 荡 器 和 放 大器都 由 9 V 直 流 电 源 供
构 成是 将 两个 反 应 电极 ( 作 电极 和 对应 电极 ) 工 以及 一个
采用 P IIS 司 L C 14作控制 系统 , H LP 公 P 22 运动系统 参 比电极放置在特定 电解液中,然后在反应电极之问加 用 L C 14中 自带的 P P 22 WM单元 ( 路输 出) 6 控制 4 步 上足够的电压 ,使透过涂有重金属催化剂薄膜 的待测气 个
ARM
振电 荡 路I
基于PC/104与单片机的仿人机器人控制系统设计

基于PC/104与单片机的仿人机器人控制系统设计作者:陶龙张国良孙大卫来源:《现代电子技术》2009年第02期摘要:为了简化仿人机器人控制系统结构,增强机器人系统的功能。
采用PC/104嵌入式系统作为仿人机器的主控计算机,完成图像处理,做出控制决策,计算并生成运动序列。
关节控制器选用C8051F310单片机,采用串口与主控计算机通信,接收来自主控计算机的运动序列指令,产生PWM波,经过放大电路,实现21路电机的控制。
经过实验,得到图像采集分析结果和仿人机器人稳态步行。
实验表明,这种控制系统能够实现仿人机器人的控制。
关键词:仿人机器人;主控制计算机;关节控制器;PWM波中图分类号:TP183文献标识码:B文章编号:1004 373X(2009)02 145 03Design of Humanoid Robot Control System Based on PC/104 and Single Chip ComputerTAO Long,ZHANG Guoliang,SUN Dawei(Second Artillery Engineering University,Xi′an,710025,China)Abstract:In order to simplify system structure and strengthen the function of humanoid robot system,embedded PC/104 system is applied as main computer of humanoid robot,which is used to accomplish image processing,make a control decision,calculate and generate movement sequence.The joint controller chooses C8051F310,receives the movement sequence instruction came from main computer,generats PWM wave,the control of 21 load electric circuit is realized by enlarge electric circuit.An analytical result of image collection,and humanoid robot steady on foot are gained by experiment.Results show that this kind of control system can carry out the control of humanoid robot.Keywords:humanoid-robot;main-controller computer;joint controller;PWM wave0 引言机器人作为一个各学科交叉的复杂系统,越来越多的科研者采用机器人作为实验平台,因为它包括机械结构的设计,控制系统的构建,信息的采集与处理,运动学和动力学分析,人工智能等多方面知识的融合。
基于嵌入式技术的太阳能自动清洁机器人设计

收稿日期:2020-05-09作者简介:冯建(1983-),男,广东人,实验师,硕士,主要研究方向:自动控制。
基于嵌入式技术的太阳能自动清洁机器人设计冯建,王贵恩,叶翠安(广东交通职业技术学院广州510800)摘要:针对目前街道清洁模式,设计一款具有太阳能方位角跟踪技术的自动清洁机器人,机器人采用红外感应技术、光电检测技术、嵌入式系统多任务等技术实现自动清洁功能。
经过实验表明,机器人太阳能方位角跟踪角度误差在10度以内,可以吸起面积在4cm2纸屑、叶片,清洁速度为0.2m/S 。
关键词:方位角跟踪自动清洁多任务中图分类号:TP211.14文献标识码:ADesign of Solar Energy Automatic Cleaning Robot Based on Embedded TechnologyFENG Jian,WANG Gui-en,YE Cui-an(Gungdong Communication Polytechnic,Guangzhou 510800,China)Abstract :Aiming at the current street cleaning mode,an automatic cleaning robot with solar azimuth tracking technology is designed.The robot uses infrared induction,photoelectric induction detection,embedded system multi task technology to realize the automatic cleaning function.The experimental results show that the solar azimuth tracking angle error of the robot is within 15degrees,it can suck up waste paper and blades with an area of 4cm2,and the cleaning speed is 0.2m/s.Key words:azimuth tracking;automatic cleaning;multitask目前公共场所洁洁工作都由环卫工人承担,工作单调,工作环境差。
光电传感器在嵌入式系统中的应用研究

光电传感器在嵌入式系统中的应用研究近年来,光电传感器在嵌入式系统中的应用越来越广泛。
这种传感器利用光学技术,将光信号转化为电信号,可以实现高灵敏度、高分辨率、高速度和低功耗等特点。
在各种领域的控制和检测中,光电传感器已成为必不可少的一种传感器。
一、光电传感器的基本原理光电传感器是利用光学原理将光信号转变为电信号的传感器。
其基本结构由发光器、传感器和信号处理电路三部分组成。
发光器通常是由光电二极管和发光二极管组成的。
这些二极管可以产生和控制特定波长的光。
传感器通常是由光电二极管或光敏电阻等感光元件组成的。
这些元件可以感知特定波长的光,并将其转换为电信号。
信号处理电路主要是用于对电信号进行处理和分析,以实现预定的功能。
二、光电传感器在嵌入式系统中的应用1. 智能家居智能家居系统是指通过智能化的技术手段,使家居生活更加便捷、舒适、智能化的系统。
光电传感器在智能家居中起到了很重要的作用,例如光电触发器可以用来控制电灯的开关,根据周围光线的强弱自动调节灯光的亮度,从而达到节能的效果。
光电触发器可以通过接线板或者编程控制单元实现。
2. 工业自动化现今各个行业的生产线越来越需要高速的精密控制。
光电传感器可以实现对物体形状、位置、颜色等相关参数的实时检测和分析,从而实现物体的定位、运动轨迹的测量等工业自动化控制。
例如光栅传感器可以用来检测机器人的位置,从而实现自动化物料搬运或者装配行程控制等功能。
3. 健康监测光电传感器在健康监测领域中也有着重要的应用,例如心率监测、血氧饱和度检测等。
光电传感器可以探测血红蛋白吸收的不同波长的光线,从而实现心率以及血氧饱和度的测量。
这种传感器可以将心率和血氧饱和度的数据传输到智能手环、智能手表、智能手机或其他设备上,实现线上监测和传播。
三、光电传感器与嵌入式系统的结合光电传感器在与嵌入式系统的结合中,软硬件设计和嵌入式编程都非常重要。
软件基于单片机或FPGA,用于采集和处理传感器数据。
用于智能机器人的嵌入式系统架构设计

用于智能机器人的嵌入式系统架构设计在当今的科技领域里,智能机器人已经成为了一个备受瞩目的话题。
随着技术的进步,智能机器人正变得越来越先进,不断地赋予它们更加智能化和自主化的能力。
而嵌入式系统,作为智能机器人的大脑,也成为了智能机器人发展的关键。
因此,本文将着重探讨基于嵌入式系统的智能机器人架构设计。
一、智能机器人的发展及其嵌入式系统智能机器人是一种采用先进的计算机技术和工程技术,以智能化、感知化和信息化为基础的自动化机器人,在工业制造、服务机器人、军事、医疗保健、家庭、教育等领域得到了广泛的应用。
在这些领域中,智能机器人已经渐渐成为了替代人力的主要工具。
随着智能机器人技术的发展,嵌入式系统越来越受到重视。
嵌入式系统是指具有特定功能的计算机系统,其硬件和软件都被集成在一起,以完成特定任务。
在智能机器人中,嵌入式系统起到了连接各个硬件和软件模块的关键作用。
二、智能机器人嵌入式系统的架构设计智能机器人嵌入式系统的架构设计主要包括硬件和软件两个方面,其目的是为了使得智能机器人的各个模块之间能够互相协调和配合,从而实现整个系统的稳定可靠和高效性。
在硬件设计方面,智能机器人嵌入式系统应该考虑的因素有很多,比如计算能力、存储容量、数据传输速度、实时性等。
其中,计算能力和存储容量是智能机器人的硬性需求,必须满足其任务的要求。
数据传输速度和实时性则是智能机器人的软性需求,需要根据具体应用场景进行权衡。
在软件设计方面,智能机器人嵌入式系统应该注重系统的可维护性和可扩展性,以便于对系统进行升级和更新。
同时,为了使得不同模块之间能够互相通信和配合,智能机器人嵌入式系统的软件设计应该采用模块化设计的思想。
三、智能机器人嵌入式系统的优化智能机器人嵌入式系统的优化可以分为硬件和软件两个方面。
在硬件优化方面,可以通过提高处理器的速度、增加存储容量、优化功耗等手段来提高智能机器人的计算能力和稳定性。
在软件优化方面,可以通过优化算法、改进编码风格、采用高效的数据结构和算法来提高智能机器人的运行效率和处理速度。
基于嵌入式系统的机器视觉目标识别技术研究
基于嵌入式系统的机器视觉目标识别技术研究嵌入式系统是指集成度非常高的微处理器系统,常常用于嵌入到一些小型设备中,提供特定的功能和服务。
在现今的科技发展中,嵌入式系统越发重要,而其中的机器视觉目标识别技术更是倍受关注。
这种技术不仅在军事、航空等领域有应用,也在生活中得到普及,如无人驾驶汽车、智能家居等。
本文将探讨基于嵌入式系统的机器视觉目标识别技术的研究。
首先,我们需要了解机器视觉目标识别技术的基本概念。
该技术是指通过计算机视觉技术,对图像或视频中的目标进行自动检测、分类、识别等处理。
这种技术的实现需要系统具有足够的计算能力和图像处理能力。
而嵌入式系统与传统计算机相比,处理能力和存储空间有限,但也有足够的处理能力来支持轻量级的视觉处理任务。
其次,我们需要了解机器视觉目标识别技术在嵌入式系统中的应用。
由于现今智能设备要求越来越高的可移动性和紧凑性,因此嵌入式视觉系统应运而生。
这种系统可以快速识别出特定目标,如人脸、车辆、物品等,并提供实时的识别功能。
在嵌入式系统中应用机器视觉目标识别技术,可以使得设备更加智能、自动化,并且提升了对其他智能应用系统的衔接度。
例如,光学识别牌照技术,可以通过嵌入式系统实现,使得无人驾驶汽车可以准确地读取道路上的交通标志和牌照,从而可以做出更加智能的驾驶决策。
接着,我们需要了解嵌入式系统中机器视觉目标识别技术的实现方式。
目标识别技术主要有两种:基于特征和基于深度学习。
基于特征的目标识别依赖于事先确定的特征提取方式,该方式用于提取目标图像中与属性相关的特征,以便进行进一步的识别处理。
而基于深度学习的目标识别则更加复杂,需要通过神经网络学习大量数据,并构建对应的卷积神经网络 (Convolutional Neural Network, CNN) 模型实现。
在嵌入式系统中,由于其计算和存储能力的限制,目前更多使用基于特征的目标识别方式。
最后,我们需要了解在嵌入式系统中机器视觉目标识别技术研究的挑战和未来趋势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第19卷 第4期2004年12月 西 南 科 技 大 学 学 报JOURNAL OF SOU THWEST UN IV ERSIT Y OF SCIENCE AND TECHNOLO GY Vol.19No.4 Dec.2004 收稿日期:2004-05-31 四川省教育厅资助(2004-A130)基于嵌入式PC 的机器人光电寻线系统梁 靓 黄玉清(西南科技大学信息与控制工程学院 四川绵阳 621010)摘要:介绍了基于嵌入式PC ———PC/104的自动机器人光电寻线系统的实现方法。
采用PC/104控制的功能模块,完成了寻线过程中数据的实时获取、位置判断与姿态调整,以达到自动纠偏的目的。
该系统具有简洁可靠、抗干扰能力强等特点,为机器人运行的准确有效性提供了可靠保证。
在实际运行中,取得了满意的效果。
关键词:机器人 PC/104 光电检测 寻线中图分类号:TP242 文献标识码:A 文章编号:1671—8755(2004)04—0001—03Photoelectric Line -tracking System of Robot B ased on Embedded PCLiang Liang ,Huang Yuqing(Southwest U niversity of Science and Technology ,M ianyang 621010,S ichuan ,Chi na )Abstract :A photoelectric line -tracking system of robot is described ,which is based on embedded PC —PC/104.By using PC/104to control function module ,the system has realized many functions ,such as receiving data ,judging location ,and adjusting status.So it can correct bias automatically.Nevertheless ,the system also has the characteristics of credibility ,concision and high anti -disturbance ability and so on.And it guarantees accuracy of the robot moving.Thus the actual running shows a satisfactory result.K ey w ords :robot ;PC/104;photoelectric measuring ;line -tracking在移动机器人的研制中,精确定位一直是研究的热点问题。
而光电寻线系统则是机器人的一种简单视觉,在机器人的运动中起着非常重要的作用,为机器人运动位置的准确性提供了保障。
本文以PC/104总线系统作为控制核心,利用光电检测来实现机器人的寻线行走。
相对于同样能够完成寻线功能的单片机而言,PC/104具有功能全、功耗低可靠性高、实时性强、与PC 机完全兼容等优点。
为了实现控制目标,选用研华公司生产的CPU 模块PCM -3350和高速数据采集卡AX10410A 两款PC/104模块作为硬件上的核心部分;AX10410A 的A/D 转换器配合光电管构成了光电检测模块,AX10410A 的D/A 转换器和数字输出配合专用驱动器构成无刷电机的驱动模块。
在软件设计上,采用自适应算法来减小行走地面的不同区域温度和光线对光电管的影响,同时加入位置反馈,以实现机器人的自适应处理。
1 基于PC/104的控制系统的硬件设计行走场地如图1所示,要求机器人能够按照墨绿色地面上宽30mm 的白色行走指示线自动地到达各个目的地(由直径为100mm 的白色圆盘指示)。
现选择在7cm 内对白色和墨绿色反应比较灵敏的反射式光电管ST178(如图2)来完成光的发射、接收以及将光信号转换为模拟信号。
其发射管发射红外线经被测物反射后光的强弱可以判别颜色。
该光电管的主要特点是:由高发射功率红外光电二极管和高灵敏度光电晶体管组成,采用非接触检测方式,同时检测距离可调整范围大,距离3~10mm 之间可用。
由于机器人的行进速度要求不高,而且PC/104的处理速度快,因此只需要给机器人底盘的前方安装一个由8个光电管组成的光电检测阵列即可。
主要使用综合数据采集卡AX10410A 上的8通道12位A/D 转换器,将通道0至通道7与各个二极管的反射信号相连。
反射光的强弱是通过模拟电压来表征的,每一个接收管都对应了一个模拟电压,将它们进行A/D 转换,并把所得的数值进行处理,从而决定机器人的行走方向。
行走机构使用的是直流无刷电机,主要使用综合数据采集卡上的高精度12位D/A 转换器与数字I/O 来实现对该电机的驱动。
数字输出通道0~通道2,与无刷电机驱动器MC33035的起停、正反转信号相连,其中起停信号是控制电机处于停止状态还是处于工作状态。
正反转信号则用于控制电机是正转还是反转。
数字输入通道6和通道7与无刷电机反馈信号相连,以检测电机速度。
D/A 转换通道0和通道1与电机驱动器MC33035的调速信号相连,用于调整电机转动的快慢。
图3是以PC/104为控制器的游走机器人控制总图。
2 以PC/104为平台的软件设计软件设计主要用到了CPU 板PCM3350上的串口以及AX10410A 上的A/D 、D/A 、数字I/O 功能,其总框图如图4。
无刷电机用于控制行走机构,该部分软件设计的目的是使机器人能够在场地上灵活的完成各种行进动作。
光电检测模块是整个软件设计的核心,因为它直接决定了机器人是否能够完成寻线行走的任务。
机器人在寻线的过程中,通过光电管不停地对地面的白色引导线和深绿色区域进行采样,将采样值经过处理后同阈值(即平均值)相比较,以此来得出机器人偏离白线的情况,继而改变机器人的行进状态。
当到达目标点时立即停止前进,数秒后又继续寻线下一个目标点。
2.1 数据获取采用光电检测的方式检测场地引导线,首先需要获取光电管采集的数据。
由于光电管的性能容易受外界光线和温度的干扰,使得采集的数据不够稳定。
鉴于此,我们在算法上采取了定时更新阈值的措施,有效弥补了这一缺陷,流程图如图5。
由于每个光电管的物理特性不一致,所以为了保证可靠性,在采样时,先分别对每个光电管在深色(墨绿色)区域进行采样,然后再采集浅色(白色)区域的电平值,这两个采样值经A/D 转换后的平均数即为阈值。
2 西 南 科 技 大 学 学 报 2004但是一次采样是远远不够的,还需要采样多次,然后再取他们的平均值作为最终的阈值。
计算公式如下:V 1=1/2(x 1+y 1),V 2=1/2(x 2+y 2)……V n =1/2(x n +y n ),V al ue =1/n (V 1+V 2……+V n )。
其中x 1……x n 为深色区域某次的采样值,y 1……y n 为浅色区域某次的采样值,V 1……V n 为某次深浅区域采样平均值,V al ue 为最终的平均值即阈值。
2.2 位置判定寻线就是实时确定机器人相对于引导线的位置。
在这过程中,需要知道机器人是否按照曲线行走,是否到达圆盘。
相对于曲线的位置可通过判断白线上方光电管接收回来的值是否对称。
但是单纯通过白线上光电管数目以及对称情况来判断机器人所处区域,很容易将交叉线误判为圆盘。
不过,由于圆盘高出地面1cm ,经过试验发现,当光电管到达圆盘(即目标点)上时接收管得到信号的值与在平地上有不同(一般而言,光电管在白色区域采样所得的A/D 转换值为300左右,在深绿色区域采样所得的A/D 转换值为100左右,在圆盘上采样所得的A/D 转换值一般在500以上),由此可以判断光电检测阵列已经在圆盘上方并发出停止信号。
除此之外,还可以采用位置反馈来辅助识别圆盘,以实现对圆盘的准确定位。
其计算公式如下:pulse N um ber =dc ・i ・m其中:d 代表从起点到目标点实际行走的距离,c =π・d ,i 为减速比,m 为电机返回的霍尔传感器脉冲个数。
d 和c 的单位必须统一。
2.3 姿态调整表1 左右轮实际转速速度等级电机实际转速r/min 左电机右电机speedL [0]840.3800.0speedL [1]952.4892.9speedL [2]1087.01020.4speedL [3]1204.81111.1speedL [4]1369.91282.1speedL [5]1587.31470.6speedL [6]1886.81754.4speedL [07]2272.72127.7 对光电检测获取的结果进行分析之后,需要对机器人行进的姿态进行灵活调整。
这要求行走机构完成前进、后退、左转、右转、原地打转、加速、减速以及停止这几种动作,相应的为各种动作划分了8个速度等级,以下是左右轮各个速度等级的D/A 转换初值:speedL [0]=558;speedL [1]=545;speedL [2]=656;speedL [3]=690;speedL [4]=780;speedL [5]=815;speedL [6]=862;speedL [7]=903。
这些值都是经验值,由于行走机构的两轮特性不是完全一样,因此实际运行时左右轮的转速有些差别,如表1。
机器人在寻线过程中,光电管标志位的设置情况与速度(下转第13页)3 第4期 梁 靓,等:基于嵌入式PC 的机器人光电寻线系统 实验环境:室温:18℃;相对湿度:52%RH ;气压:754.0mmHg从表1中,我们可以看出,与HP 干涉仪读数相比,本位移检定系统的测量误差小于±2.0μm ,满足了课题预期不大于±2.5μm 的指标要求。
5 结束语以双纵模热稳频激光干涉仪为基础的差动位移传感器检定系统具有以下特点:位移测量范围大(0~500mm );测量精度高(优于±2.0μm );可快速动态测量,最大运动速度达50mm/s ;自动化程度高,除被检定位移传感器的安装外,其余检定工作由微机自动完成;软件功能较强大,包括检测控制、定点取数、数据处理、误差分布曲线绘制、系统误差补偿、已检定传感器数据库等;系统界面友好,易于操作。
该检定系统已成功用于某航空工业企业的差动位移传感器的检定中。
参考文献1 Z. F.Zhou.Micro -interferometer S ystem for Measuring the Profiler of Fine Structure[J ].Proceeding of IMEKO XI Interna 2tional Conference ,Houston ,USA ,1988,49~572 Lau ,K.,Hockn ,R.J.and Haight W. C.Automatic Laser Tracking Interferometer System for Robot Metrology[J ].Precision Eng.,1986,8(1):3~63 殷纯永.现代干涉测量技术[M ].天津:天津大学出版社,1999,148~2254 李广云,樊钢,李宗春.双频激光干涉仪在测距仪精度自动检测中的应用[J ].解放军测绘学院学报,1999,16(3),161~1645 邱宗明,郭彦珍,李信.激光干涉仪应用于无导轨测距的研究[J ].光子学报,2001,30(7),882~8826 黄长艺,等.机械工程测试技术基础[M ].北京:机械工业出版社,1995,64~69(上接第3页)表2 标志设置与速度等级设定关系表标志设置情况左轮速度等级右轮速度等级10000000speedL [0]speedL [7]01000000speedL [2]speedL [7]00100000speedL [4]speedL [7]00010000speedL [6]speedL [7]00011000speedL [7]speedL [7]00001000speedL [7]speedL [6]00000100speedL [7]speedL [4]00000010speedL [7]speedL [2]00000001speedL [7]speedL [0]等级设定的关系如表2,这也是机器人进行姿态调整的依据。