基于UG下的钢丝包装机的虚拟装配
基于UG NX的产品虚拟装配仿真及装配序列化

图6 K2壳体被拆卸 Fig.6 K2 shell is disassembled
图8 膜片弹簧被拆卸 Fig.8 The diaphragm spring is removed 2.3 基于 UG NX 的 DSG 双离合器装配规划
关键词 :UG NX ;虚拟装配仿真 ;DSG 双离合器 ;装配序列化
中图分类号 :TP391.72
文献标识码 :A
DOI :10.3969/j.issn.1003-6970.2021.04.040
本文著录格式:王琛.基于UG NX的产品虚拟装配仿真及装配序列化[J].软件,2021,42(04):128-131
产品的装配规划是将零散的部件装配成产品整体的 和自顶向下的装配方法。DSG 双离合器的装配建模使用
规划过程,重点考虑产品装配的规划方案和操作步骤, 了自底向上的装配方法,即先建立零件的三维实体模型,
主要包括装配序列规划和装配路径规划。装配序列规划 再将模型组合成子装配,最后生成装配体的装配方法。
主要包括装配序列的几何可行性分析,装配序列的几何 UG NX 软件的模型装配过程是构建零件间约束关系的
作者简介 :王琛(1992―),男,研究生,实验师,研究方向 :计算机辅助产品设计。
王琛:基于 UG NX 的产品虚拟装配仿真及装配序列化
规划 [6]。
分别和 1 档齿、3 档齿、5 档齿相啮合 ;输入轴 2 是空
1.1 产品的装配建模
心的,和离合器 K2 相连,输入轴 2 上的齿轮分别和 2
产品的装配建模是将形式化的面向装配设计技术与 档齿、4 档齿、6 档齿相啮合 ;倒档齿轮通过中间轴齿
基于虚拟现实技术的机械装配仿真与优化设计

基于虚拟现实技术的机械装配仿真与优化设计虚拟现实技术的快速发展使得许多领域的设计和仿真工作得以取得重大突破。
在机械装配领域,虚拟现实技术已经被广泛应用于装配仿真与优化设计工作中。
本文将探讨基于虚拟现实技术的机械装配仿真与优化设计的相关应用,以及其对装配工作质量与效率的提升作用。
一、虚拟现实技术在机械装配仿真中的应用随着虚拟现实技术的发展,传统的机械装配仿真已经逐渐转向了虚拟装配仿真。
在虚拟装配仿真中,虚拟环境中的各个零部件和装配过程能够被准确地模拟出来,操作者可以通过虚拟现实设备进行沉浸式的操作和观察。
这种方式不仅提高了仿真的真实度,还可以显著降低装配工作过程中的错误率。
操作者可以通过虚拟装配仿真系统提前发现并解决装配过程中的潜在问题,进而提高装配的准确性和效率。
虚拟装配仿真还可以结合数字孪生技术,通过将真实装配线上的数据与虚拟装配仿真系统相结合,来评估和改进装配线的性能。
操作者可以在虚拟现实环境中模拟真实装配线上的各种情况,包括装配过程中的节拍、工作负荷、物料供应等,通过仿真结果来评估并改进装配线的优化方案。
这样的应用不仅可以提升装配线的效率,还可以降低生产成本,提高产品质量。
二、虚拟现实技术在机械装配优化设计中的应用虚拟现实技术的应用不仅局限于机械装配仿真,还可以在机械装配的优化设计中发挥关键作用。
通过虚拟现实技术,可以对机械产品的装配设计进行全面的评估和优化。
首先,虚拟现实技术可以在产品设计阶段对装配性进行评估。
在虚拟装配仿真系统中,设计师可以通过对产品的装配过程进行模拟并观察,来评估装配的难度和可行性。
设计师可以在虚拟环境中对产品进行装配时的各项指标进行评估,包括装配工具的选用、装配顺序的确定等。
这样的评估结果可以为产品的设计提供重要指导,从而达到更好的装配性能。
其次,虚拟现实技术可以在产品装配的质量控制过程中发挥作用。
通过虚拟装配仿真系统,操作者可以对装配过程中的每一个关键节点进行精确的操作和观察,并实时获得装配结果的反馈。
基于UG的机床夹具虚拟装配技术研究

pann n ye el sh ne rnecls nt h o g frh smbi e xueid — l igiaa zda w la teit ec oio c nl y o ea e lgot tr s i n s l s 咖 li e o t s n fhf i s cse ;ial, ev ta sm l i cnl tde , ruhw i h ai smbyo chn usdFnl t iu iuao t hoo i s idt og hc ter da e l fma i y h rl t ne y g s u h h p s e
第 8期 2 1 年 8月 01
文章编号 :0 13 9 (0 )8 0 3 — 3 10 — 9 7 2 1 0 — 2 7 0 1
机 械 设 计 与 制 造
Ma h n r De i n c iey sg & Ma u a t e n f cur 27 3
基于U G的机床 夹具虚拟装 配技 术研 究
Ke r sUG ; ru l se by I t re e c y wo d : Vit a s m l ;n e fr n e a
中图分类 号 :H16 文献标 识码 : T 6 A
1 引言
近几年 , 虚拟现实技术发展迅速 , 人们开始认识到虚拟现实
孔、 端面和外 圆在分度 盘的外圆 、 三个支承钉和活动 形块上定 位。插入开 E垫圈 , l 拧螺母夹紧工件 , 钻完第一个孔后 , 抬起手柄 拔出定位销 , 转动分度盘 , 当下一个分度孔与定位销对准时 , 对定 销在 弹簧作用下 , 插入分度孔 , 即可钻第二个孔 , 以此类推。
B oig 7 0 3 C ia adn 10 , hn ) 0
基于UG下的钢丝包装机的虚拟装配

设计题目: 基于UG下的钢丝包装机的虚拟装配
学生姓名: 李 保 林
所在院系: 机 电 学 院 所学专业: 机电技术教育
导师姓名: 逄
明
华
完成时间: 2009年5 月28日
主要研究内容
研究背景 1基于UG的钢丝包装机设计方案 2 三大运动系统的实现和调节 3钢丝包装机的装配 4 工程图 5 总 结
3
4
5 6
3 钢丝包装机的装配
UG装配模块不仅能快速的将零件组合成产品,而且在装配中,可 参照其他部件进行部件关联设计,并对装配模型进行间隙分析和重量管 理等操作。装配模型产生后,并可将其引入到装配工程图中。 3.1 装配后的效果图
4 工程图
将其引入到工程图中,并标注出总体尺寸,制作出的工程图如下:
2 . 胶带环通过滚轮1和2定位在面 板上,其中2是动力轮,用 4000W的电动机带动轴5旋转, 通过带6的摩擦力 使其它三个滚 轮一起旋转,从而通过滚轮与胶 带环相互的摩擦力使胶带环绕其 中心线作旋转运动,使固定在轴 4上的胶带有条不紊的对钢丝进 行缠绕包装。 . 调节其转速和转向可能 通过调节电动机的的滚动运动系统 . 用4000W的电机通过带传 动带动轴1转动,轴1通过 三角带与轴4相连,从而使 两滚轮2同速同向转动,使 放在上面的钢丝按预定的速 度和方向滚动。 . 调节钢丝的滚动速度和 方向可能通过相应的调 节电动机的转动速度和 转向来实现。
1 2
3 4
2.3 胶带的缠绕运动系统 1
板到合适的高度,然后转动手轮6,通过四个固定滑轮8使钢 丝准确的固定在底座的正中间;
.在电机的带动下,4开始旋转,从而通过皮带5带动另一滚轴 2
基于UG的以设计为中心的虚拟装配技术及应用

关键词 :设计 ;虚 拟装 配技术 ;应用 ;U G
中图分类号 :T 9 P3 1 文献标识码 :B 文章编号 :1 0 —0 3 ( 0 0 0 — 2 7 3 9 1 4 2 1 ) 6 0 4 -0 0
Do : . 9 9 . s . 0 -0 4 2 1 0 8 i 1 3 6 Aii n 1 9 1 . 0 6. 1 0 s 0 3 0.
2 手机上 盖模 具的主体设计
手 机 上 盖 模 具 的主 体 设 计 包 括 手 机 上 盖 的 实 体 模 型 、 分 型 面 、 型 芯 、 型 腔 等 。设 计 过 程 中 各
计 初 期 就 把 产 品设 计 过 程 与制 造 过 程 有机 结 合 , 从 设 计 的 角度 来 保 证 产 品具 有 良好 的装 配 和 制 造 工 艺 性 。通 过 完 成 产 品 的实 体 造 型 ,装 配 与 分 析 等 协 调 的 设 计 过 程 ,实 现 产 品设 计 过 程 与 零 部 件
杨 家鹏
Y ANG i- e g Ja- n p
( 广西水利 电力职业技术学院 ,南宁 5 0 2 3 0 3) 摘 要 :从分析基于U 以设计为中心 的虚拟装配技术出发 ,并结合手机上盖模具主体设计的设计过程 , G
对在 产品设计中如何应用虚拟装配技术 ,提 高产 品的设计的质量和效率作 了研究和探讨 。
计 在 概 念 设 计 并 未 全 部 完ቤተ መጻሕፍቲ ባይዱ成 就 可 以 开 始 。在 设 计
过 程 中 或 设 计 完 成 后 ,一 旦 装 配 中任 何 部 件 进 行
修 改 ,其 它 相关 的数 据 会 自动 更 新 ,不 需 要 对具
的虚拟 装 配技 术 进行 手机 上盖 模具 的主体 设计 。
UG_NX装配教程
按配对条件添加组件的步骤
1. 新建一个文档 File New
2. 选择装配模块 Application
Assemblies
3. 选择Assemblies Components Add Existing Component
4. 选择要添加的部件
5. 设置定位方法,单击OK按钮,弹出点构造器
6. 在屏幕上任选一点将部件初步定位
12. 重复8~11步骤添加其他配对约束
13. 单击Apply按钮,完成操作
自顶向下装配
• 自顶向下装配的方法有两种: • (选择Assemblies Components Create New…) 第一种方法 1. 先建立装配结构,此时组件中没有任何几何对象。 2. 使其中一个组件成为工作部件,然后建立几何对象。 3. 重复第二步骤,最后用配对约束装配起来。
添加到新组件中后,会将装配件中的几何模型删除 6. 单击OK,新组件装到装配件中,同时添加了几何模型 7. 重复第3~6步骤
Part1
Part2
Part3
Part3
Part1 Part2
建立关联几何对象
• 在组件间建立链接关系的方法:将要建立链接关系的组件变为工作部件,再选 择Assemblies Wave Geometry Linker…,然后用对话框中的功能,将显示 部件的几何对象引用到工作部件中。接着再进行相关操作。 链接工具选项
(count 2)
配对条件
配对条件树
配对类型 选择步骤
过滤器
其他配对方案 预览配对
改变约束条件
错误清单
配对类型
• 配对约束(Mate)
用该配对类型定位, 1.对于平面对象,它们共面且法向方向相反;
虚拟技术在机械装配工序中的应用

目前 , 征建 模 技术 己成 为 新 一代 建模 技 术 。 特 它 是集 并 行性 和集 成 性 为一体 的面 向产 品 生命 周 期 设计 的 重要 技术 。常用 的特 征 建模 方 法有 :基
于B r p — e 的方法 、基 于C G S 的方 法 、基 于 混合
CG Br p S / — e 的方 法 。
( )获取 特 征参 数 ,根 据特 征 类 型创 建相 应 3 的特 征 对 象 ,把这 些 特 征参 数存 储在 对 应特 征对
象 的成 员 变量 中: U / p n A I 获取特 征 类 型 的函数 为 G O e P 中
U D as f at F MO L k e
— — —
用具有一 定借鉴意义 。
关键词 :虚 拟设计 ;机械装配 ;装 配工序
中 图分 类号 :T 3 1 7 T 14 文 献 标 识 码 :A 文 章编 号 : 1 7 — 8 1( 0 0 0— 1— 3 P9 .3 H 6 6 2 4 0 2 1 )一 2 15 0
虚 拟设 计 与制 造 是虚拟 现 实 技术 在制 造领 域
机 电研究及设计制造
《 电技 术》2 1 机 0 0年第 2期
虚拟技 术在机械装 配工序 中的应用
陈 曼
( 明职 业 技 术 学 院 , 福 建 三 明 3 5 0 ) 三 6 0 0
摘 要 :对 于复杂生产加工机械 过程 ,虚拟装配技 术逐渐得到广泛应 用 ,本文重 点探 讨虚拟技术在机械 装配工序 中 的应用 ,首先构建 了基于装配特 征参数的虚拟装配参数模 型,并在此基础上分析 了虚拟装配工序顺序 ,探 讨 自上而下的 装配设计顺 序,并对虚 拟装配序列进行 了优化 设计,对 于进 一步提高虚拟技术在机械 装配设计及其工序优化 设计 中的应
ug装配功能详解

ug装配功能详解1 UG/Gateway + Y8 e+ ~8 |2 n. H' _UG入口) O* x- \# q m- ^UG/Gateway入口模块是连接UG软件所有其它的基本框架,是启动UG软件运行的第一个模块,该模块为UG软件其它各模块运行提供底层统一数据库支持和一个窗口化的图形交互环境,执行包括打开、创建、存储UG模型、屏幕布局、视图定义、模型显示、消隐、着色、放大、旋转、模型漫游、图层管理、绘图输出、绘图机队列管理、模块使用权浮动管理等关键功能,同时该模块还包括以下方面功能:# i" S9 W3 p4 |! D: j, l包括表达式查询、特征查询、模型信息查询、坐标查询、距离测量、曲线曲率分析、曲面光顺分析、实体物理特性自动计算功能在内的对象信息查询和分析功能用于定义标准化零件族的电子表格功能按可用于互联网主页的图片文件格式生成UG零件或装配模型的图片文件,这些格式包括:CGM、VRML、TIFF、MPEG、GIF和JPEG输入、输出CGM、UG/Parasolid等几何数据Macro宏命令自动记录、回放功能" C; A8 y* H3 P$ w' N( C9 G$ [$ n. X! V6 u9 j/ M# iUser Tools用户自定义菜单功能,使用户可以快速访问其常用功能或二次开发的功能; b6 B0 I; K1 h8 R4 z( [: N( k/ O2 UG/Solid ModelingUG实体建模7 `0 t" a! x" X; a0 vUG/Solid Modeling实体检模模块将基于约束的特征造型功能和显示直接几何造型功能无缝地集成一体,提供业界最强大的复合建模功能,使用户可以充分利用集成在先进的参数化特征造型环境中的传统实体、曲面和线架功能。
该模块提供用于快速有效地进行概念设计的变量化草图工具、尺寸驱动编辑和用于一般建模和编辑的工具,使用户既可以进行参数化建模,又可以方便地使用非参数化方法生成2维、3维线架模型、扫掠和旋转实体以及进行布尔运算,也可以部分参数化或将非参数化模型后参数化,方便地生成复杂机械零件的实体模型。
基于UGNX8.5软件虚拟装配理论研究
装配体 中 ,添 加 的组件是 否载入 系统 均可 以 ,同时可
组件 操作 有拖放 组件 、选 择组件 和将 组件 设为工 作组
件三 种 。预 览标题 栏可展 开或 折叠 面板 ,可 查看组 件
的预 览 ,新组 件添 加到 系统后 ,同时会 在预 览面板 中
显示 。 相依性面板装配组件有父级和子级两个文件夹 ,
由零件子 装配和 部件构 成 。组件 是在指 定位置 与方 向 装 配使用 的部件 ,独立的 部件或者 级别较 低 的组 件组 选择 开始菜 单 的装配 命令 ,进 入装配 环境 ,装配 环境 下拉菜 单包合 装配操 作应用 的全部命 令 ,装 配工 具 条中含 有装配 常用命令 。点击 查找组 件 ,打开 对话 框 ,包 含根 据状 态 、按名 称 、从列 表 、根据 属性 及按
d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2 —9 5 2 8 . 2 0 1 5 . 0 5 . 1 l
软件 UG N X8 . 5提 供了功能强大 的装 配模块 ,完
成的子 装配都 是可 以是组件 ,组件几 何体修 改时 ,装 配体会 随之发生 相应 变化 。装 配状态 中 ,组件不 允许
以选 中的组 件作基 础组件 ,定为 其他组 件过程 中建 立
的约束与配对 对象属于子级 , 以其他组件作基础组件 ,
基于UG的机械制图虚拟模型设计

基于UG的机械制图虚拟模型设计作者:尚珍静恩鹤来源:《科技创新与应用》2015年第23期摘要:针对目前机械制图课程中实物模型的缺陷,文章利用UG软件中二维工程图、三维模型、爆炸图及AVI格式动画制作等功能和Flash动画制作功能。
并通过实例说明虚拟模型制作方法。
这种方法大大提高教学灵活性、教学质量、减轻教师工作量、减少教学成本。
关键词:机械制图;虚拟模型;UG1 概述机械制图作为一门专业基础课,在教学过程中需要使用大量的教学模型辅助学生完成二维平面和三维立体的转换,以增加学生的感性认识,提高学生的空间思维能力。
而传统的实物模型由于其体积大、不便携带、易损坏、不变动态演示、数量有限等缺陷,造成使用的极大不便,同时达不到预期的使用效果。
随着计算机的快速发展,应用计算机软件结合多媒体技术建立。
这样,不仅可以让学生轻松的掌握由三维到二维的投影转换原理和过程,培养学生空间想象力,还可以极大的提高学生学习的趣味性与教学效率。
2 虚拟模型及动画的建立文章选择UG软件进行虚拟模型库的建立。
UG是面向制造行业的CAD/CAE/CAM软件,该软件能够准确描述任意的几何形状,可以快速简单地设计所要建立的三维实体,并利用二维工程图模块建立与三维实体相关的二维工程图。
UG软件能够完成概念设计、详细设计、装配、生成工程图、结构与运动分析的全过程,使CAD、CAE和CAM有机集成,使产品的设计、分析和制造一次完成。
2.1二维工程图的建立工程图是零件加工和制造的依据,在UG中,三维图形和二维视图具有相关性,任何一个利用实体模型创建的三维模型,都可以用不同的投影方法、不同的图样尺寸和不同的比例建立多张二维工程图。
并且,该工程图与实体模型是完全关联的,当实体模型改变时,工程图也会同步自动更新。
同时,UG的工程图模块提供了各种视图的管理功能,利用这些功能,可以方便的管理工程图中所包涵的各类视图,并可修改各视图之间的缩放比例、角度等参数。
基于UG软件的虚拟仿真实验研究与分析
西安航空学院学报 JournalofXi′anAeronauticalUniversity
Vol.36 No.3 May.2018
基于 UG 软件的虚拟仿真实验研究与分析
杨武成,马翔宇,孙俊茹,谭传洲
(西安航空学院 机械工程学院,西安 710077)
摘 要:针对公差实验中因学生仪器使用方式及读数精度对误差产生和仪 表 损 坏 的 影 响,结 合 UG 强 大 的 建 模 特 征 及分析能力,提出基于 UG 的虚拟仿真实验研究,对长度测量所使用的常用 仪 器、被 测 零 件 进 行 探 究,求 解 相 关 物 理 模型,采用 UG 中的仿真模块对长度测量进行仿真分析,并对仿真结果进行 后 处 理,模 拟 长 度 测 量 的 实 验 过 程,达 到 对学生实验引导及直观认识的目的。仿真实验表明:采用基于 UG 软件长度 测 量 的 虚 拟 实 验,学 生 既 可 轻 松 掌 握 具 体 的 实 验 步 骤 ,亦 可 对 测 量 仪 器 的 量 具 结 构 和 操 作 机 理 具 有 更 高 的 认 识 。 关 键 词 :公 差 实 验 ;长 度 测 量 ;虚 拟 仿 真
中 图 分 类 号 :TP391.9 文 献 标 识 码 :A 文 章 编 号 :10089233(2018)03004505
0 引 言
在公差实验中,长 度 测 量 实 验 是 [1] 必 做 实 验 项 目。实验过程中,主要 是 让 学 生 先 了 解 各 种 长 度 测 量工具 的 [2] 原理,然 后 实 际 动 手 进 行 各 种 测 量 方 法 和测量步 骤 的 训 练。 因 仪 器 使 用 方 式 和 读 数 准 确 度的影响,常常导致 一 些 随 机 误 差 产 [3] 生 和 仪 表 的 损坏。而公 差 实 验 中 长 度 测 量 所 用 到 的 量 具 大 多 是游标卡 尺、千 分 尺 和 高 度 尺[4],实 验 中 由 于 操 作 失误[5]、操作者 读 数 误 差[6]、仪 器 磨 损[7]、仪 器 测 量 精度 等 [8] 原因很容易 产 生 较 大 的 误 差,且 这 些 常 见 的误差不易被消除。针对教学中公差实验的改革, 国内很多 学 者 做 了 相 关 研 究。 杨 琪 文 简 述 了 测 量 数据中粗大误差的 概 念,分 析 了 粗 大 误 差 产 生 的 原 因 和 消 除 方 法 ,介 绍 了 如 何 根 据3σ准 则 在 测 量 数 据 中发现 并 剔 除 粗 大 误 差 。 [9] 关 于 公 差 实 验 测 量 中 产生误差的研究文 献 较 少,大 多 是 对 公 差 实 验 的 教 学方法进行 改 革。 王 颖 淑 等 人 介 绍 了 公 差 CAI实 验教学软件系统,其 中 包 括 实 验 原 理、实 验 操 作、数 据处理、实验报告、自 测 题 库 五 部 分,并 结 合 实 际 教
基于UG的机床夹具虚拟装配技术研究
基于UG的机床夹具虚拟装配技术研究基于UG 的机床夹具虚拟装配技术研究范孝良梁宇红(华北电⼒⼤学机械⼯程系,保定071003)Research for virtual assembly technology of machinetool ’s fixture based on UGFAN Xiao-liang ,LIANG Yu-hong(Department of Mechanical Engineering ,North China Electric Power University ,Baoding 071003,China )⽂章编号:1001-3997(2011)08-0237-03【摘要】虚拟制造作为⽬前制造业最具挑战性的领域,发展速度惊⼈。
以⽴式钻床夹具为例,在UG 软件基础上介绍了夹具设计及三维建模的⽅法,并成功创建了夹具三维模型;并采⽤⾃底向上的装配⽅式完成夹具的装配;分析了夹具的装配顺序及路径规划;探讨了夹具装配⼲涉碰撞技术;最后研究了虚拟仿真技术,实现了机床夹具的快速装配,这样提⾼了设计质量,缩短了开发周期,提⾼了企业对新产品的⾃主研发能⼒和竞争,充分体现了虚拟装配技术的优越性。
关键词:UG ;虚拟装配;⼲涉【Abstract】Virtual manufacturing as the most challenging field ,is developing in an amazing speed.By taking vertical drilling fixture as an example ,a method for fixture design and 3D modeling is introduced in this paper based on UG software ,and a 3D model for the fixture is built successfully.Meanwhile the fixture is assembled by adopting the bottom up assembly way.Then the fixture assembly sequence and the path planning is analyzed as well as the interference collision technology for the assembling of the fixture is dis -cussed ;Finally ,the virtual simulation technology is studied ,through which the rapid assembly of machine tool is realized ,which improves the design quality ,shortens the development cycle and improves capability of enterprise in researching and developing new product independently and their competiveness.The advan -tages of virtual assembly technology is fully embodied.Key words :UG ;Virtual assembly ;Interference中图分类号:TH166⽂献标识码:A*来稿⽇期:2010-10-241引⾔近⼏年,虚拟现实技术发展迅速,⼈们开始认识到虚拟现实在各个领域的应⽤价值,虚拟装配是虚拟制造的重要组成部分,利⽤虚拟装配可以验证装配设计和操作的正确与否,以便及早的发现装配中的问题,对模型进⾏修改,并通过可视化显⽰装配过程。
基于虚拟现实技术的机械装配仿真与优化

基于虚拟现实技术的机械装配仿真与优化近年来,随着科技的飞速发展,虚拟现实技术(Virtual Reality,简称VR)在各个领域迅速应用,并在机械装配领域展现出了巨大的潜力。
基于虚拟现实技术的机械装配仿真与优化已经成为了研究的热点。
本文将探讨虚拟现实技术在机械装配领域的应用,并重点阐述了其在机械装配仿真与优化方面的优势和挑战。
一、虚拟现实技术在机械装配仿真中的应用在传统的机械装配中,通常需要进行大量的实物模型制造和试验验证,耗费时间和成本较高。
而基于虚拟现实技术的机械装配仿真则能够通过计算机生成的虚拟环境,实现对机械装配过程的模拟和评估,可以提前发现问题并进行优化,从而大大减少了实际装配过程中的错误和困难。
通过虚拟现实技术,我们可以搭建一个虚拟的装配环境,将零件和机器等元素通过计算机图形技术进行高度逼真的建模和渲染,使得用户在虚拟环境中如同置身于实际的装配现场。
通过操纵手柄等交互设备,用户可以进行零件的拖拽、旋转、组合等操作,实时观察装配过程中可能出现的情况,并及时采取措施。
这样一来,不仅能够大大加快装配的速度,还能够为操作者提供一个安全、高效的工作环境。
二、虚拟现实技术在机械装配优化中的应用除了在机械装配仿真中的应用,虚拟现实技术还可以结合优化算法,对机械装配进行进一步的优化。
通过建立数学模型,并应用优化算法对问题进行求解,可以得到最优的装配方案。
在虚拟现实技术的支持下,我们可以对不同的装配方案进行模拟和比较。
通过观察虚拟装配过程中的运动轨迹、碰撞检测等情况,可以评估不同方案的优劣,并对其进行优化。
在虚拟环境中,我们可以轻松地修改零件的位置、参数等,进行多次试验和优化,以找到最佳的装配方案。
这种基于虚拟现实技术的装配优化方法,不仅节约了时间和成本,还能提高装配质量和效率。
三、虚拟现实技术在机械装配仿真与优化中的挑战虚拟现实技术在机械装配仿真与优化领域的应用带来了许多好处,但也面临着一些挑战。
UG-装配功能详细说明

第8章装配功能(100)本章主要内容:●装配概述●装配结构编辑●装配动画●爆炸图●装配工程图8.1 装配概述UG装配过程是在装配中建立部件之间的链接关系。
它是通过关联条件在部件间建立约束关系来确定部件在产品中的位置。
在装配中,部件的几何体是被装配引用,而不是复制到装配中。
不管如何编辑部件和在何处编辑部件。
整个装配部件保持关联性,如果某部件修改,则引用它的装配部件自动更新,反应部件的最新变化。
8.1.1 装配的概念UG装配模块不仅能快速组合零部件成为产品,而且在装配中,可参照其它部件进行部件关联设计,并可对装配模型进行间隙分析、重量管理等操作。
装配模型生成后,可建立爆炸视图,并可将其引入到装配工程图中;同时,在装配工程图中可自动产生装配明细表,并能对轴测图进行局部挖切。
本章主要介绍UG基本装配模块的使用方法。
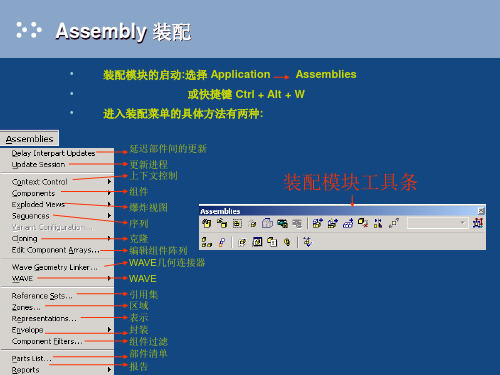
执行装配操作时,先在主菜单条上选择【Assemblies】菜单项,系统将会弹出下拉菜单,如图8-1所示,用该菜单中的各单项可进行相关装配操作,各菜单项的说明如下。
图8-1 【Assemblies】下拉菜单同时,用户也可以通过选择命令【UG/Application】→【Assemblies】打开【UG/Assemblies】各种操作的快捷工具菜单,如图8-2所示。
图8-2 打开【UG/Assemblies】主界面选择【Assemblies】菜单项后,系统将会弹出装配工具栏,如图8-3所示,其功能说明如下。
图8-3 装配工具栏8.1.2 装配术语1.装配部件装配部件是由零件和子装配构成的部件。
在UG中允许向任何一个Part文件中添加部件构成装配,因此任何—个Part文件都可以作为装配部件。
在UG中,零件和部件不必严格区分。
需要注意的是,当存储一个装配时,各部件的实际几何数据并不是存储在装配部件文件中,而存储在相应的部件(即零件文件)中。
2.子装配子装配是在高一级装配中被用作组件的装配,子装配也拥有自己的组件。
基于UG的一种虚拟装配技术的改进方法

基于UG的一种虚拟装配技术的改进方法
侯文君;石娟娟;孙汉旭
【期刊名称】《机电产品开发与创新》
【年(卷),期】2004(017)005
【摘要】本文在分析三维软件UG中的两种虚拟装配技术的基础上,针对胶印机在UG中虚拟装配设计的实际工程应用,提出了一种改善Top-down虚拟装配技术的算法,并对该算法的实现过程进行具体的阐述,指明其对虚拟装配技术的发展有一定的意义,最后给出了这种算法的程序流程图.
【总页数】3页(P62-64)
【作者】侯文君;石娟娟;孙汉旭
【作者单位】北京邮电大学,自动化学院,北京,100876;北京邮电大学,自动化学院,北京,100876;北京邮电大学,自动化学院,北京,100876
【正文语种】中文
【中图分类】TP305
【相关文献】
1.基于UG的机床夹具虚拟装配技术研究 [J], 范孝良;梁宇红
2.基于UG的汽车手刹虚拟装配技术应用 [J], 周晓刚
3.基于UG的尾翼稳定脱壳穿甲弹虚拟装配技术 [J], 崔瀚;焦志刚
4.基于UG虚拟装配技术的运输装填车滑动架设计 [J], 王洁;韩勇;程永强;王迎春;时建明
5.基于UG的家具虚拟装配技术 [J], 王琛[1];郁舒兰[1];羊玢[2];李攀[1]
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文)20 届本科毕业设计 设计题目:基于UG下的钢丝包装机的虚拟装配 学生姓名:所在院系:所学专业:导师姓名:完成时间:本科毕业设计(论文)摘 要 UG是现代计算机辅助设计中应用最广泛的先进三维软件,其功能十分强大。
本文介绍了基于UG下的钢丝包装机各零件的造型过程,详细说明了在UG的装配模块对钢丝包装机各零件如滚动滑轮,轴,底座,面板,支架的虚拟装配并制作出工程图,根据装配图对设计的钢丝包装机各零件之间的关系进行检测,看是否存在干涉现象,进一步观察设计的钢丝包装机是否合理,从而提高了钢丝包装机设计的准确性和效率。
关键字: UG;参数化设计;三维造型;虚拟装配;工程图 Virtual Assembly and Movement Simulationof Steel Wire Automatic Packaging Based on UG Abstract:UG is in the modern computer-aided design applies the most widespread advanced three dimensional software, its function is very formidable. This article introduced based on the UG under steel wire packaging machine various components' modelling process, explained in detail in the UG assembly module to the steel wire packaging machine various components like gear, the rolling pulley, the axis, the foundation, support's hypothesized assembly and manufactures the engineering plat, carries on the examination according to the assembly drawing to between the design reduction gear various components' relations, looked whether to have the interference, finally through the production steel wire packaging machine's movement simulation, further observes the design the reduction gear to be whether reasonable, thus enhanced the steel wire packaging machine design accuracy and the efficiency.Key words:UG; Parametrization design; Three dimensional modelling; Hypothesized assembly; Engineering plat 目录1 绪论 01.1 CAD的发展过程及现状 (1)1.2基于参数化设计的意义 (2)1.3 背景及本文所做的工作 (2)2 基于UG的钢丝包装机设计方案 (3)2.1最终模型图及工作原理 (3)2.2三大运动系统的实现和调节 (4)2.2.1 钢丝定位运动系统 (4)2.3.2钢丝的滚动运动系统 (4)2.3 钢丝包装机零件的设计 (5)2.3.1底座的三维模型设计 (5)2.3.2底座上的固定联结支撑部分设计 (6)2.3.3轴,齿轮轴及带轴的三维模型设计 (6)2.3.4操纵轴及轮的三维模型设计 (7)2.3.5 固定滑轮的三维模型设计 (7)2.3.6滚轮的三维模型设计 (8)2.3.7 带的三维模型设计 (8)2.3.8螺钉的三维模型设计 (8)2.3.9支架的三维模型设计 (9)2.3.10 包装带圆环的三维模型设计 (9)2.3.11 面板的三维模型设计 (10)2.3.12升降轴的三维模型设计 (11)2.3.13升降手轮的三维模型设计 (11)2.3.14操作面板的三维模型设计 (12)2.4 钢丝包装机的装配 (12)2.4.1 装配的概述 (12)2.4.2 底座组件的装配 (13)2.4.3面板的装配 (14)2.4.4支架的装配 (15)2.4.5 钢丝包装机的总装配 (15)3.制作工程图 (17)4结束语 (18)致谢 (19)参考文献 (20)1 绪论 计算机辅助设计(Computer Aided Design)简称CAD,是以计算机为主要技术手段,运用和生成各类数字信息和 图形信息以进行产品设计。
CAD技术是通过计算机和CAD软件对设计“产品”进行分析,计算与模拟,调整优化产品结构和性能,并进行绘图。
这种技术把设计人员所具有的 最佳特性(创造性思维,形象思维,知识经验,综合判断与分析的 能力)同 计算机的 强大的 记忆与信息检索能力,大量信息的高速精确计算与处理能力,易于修改设计,工作状态稳定且不疲劳的特性结合起来,从而大大提高设计速度和效率,提高设计质量,降低设计成本。
1.1 CAD的发展过程及现状 随着计算机技术和计算机图形学技术的发展,CAD技术的思想于20世纪50年代末开始萌芽。
美国麻省理工学院研制成功第一台电子三坐标铣床,并开始研究APT(Autormatiaiiy Programmed Tools)系统。
同一时期,美国CALCOMP公司研制成功简式绘图机,GERBER 公司研制出平台式绘图仪,这些都为发展CAD技术 提供了 最基本的 物质条件。
60年代初,麻省理工学院Sutherland 发表了 《SKETCHPAD―人机对话系统》一文,为 CAD技术提供了理论基础。
1966年出现了第一台使用的图形显示装置。
60年代的实验室研究,又促进了 计算机图形学的飞跃发展。
70年代初,CAD技术进入早期使用阶段。
美国Lockhead 飞机公司推出了 CADAM系统。
通用汽车公司研制成功DAG-1自动设计系统。
由于飞机和汽车中遇到大量的自由曲面问题,法国人 提出了 贝塞尔算法。
应用此算法能在二维绘图系统CADAM的基础上,开发出以表面模型为特点的自由曲面建模方法,推出三维曲面造型系统CATIA。
它的出现,首次首先以计算机来完整描述产品零件的主要信息,同时业使得CAD技术的开发又了现实的基础。
这式的CAD技术主要运用于军用工业。
80年代,由于计算机软件,硬件产品的功能达到新的水平,性价比大大提高,尤其式 32位小型机和 超级微型计算机的出现,使CAD系统开始为中小型企业所用。
我国对CAD/CAM技术的研究始于航空工业。
高等院校和 科研院在CAD 支撑和应用软件的开发上担任及其重要的角色。
在二维交互绘图系统,又不 少自主版权的软件,如开目CAD 、CAXA电子图板,金银花系统等 都在国内行业中 推广使用。
在应用领域,如通用机械零件设计,冲压和注射模具的设计制造,汽车外形设计,汽轮机叶片设计分析等方面我国均研制出实用的CAD软件,如今CAD技术及其应用水平已经成为衡量一个国家,一个行业设计水平的重要标准。
现在的CAD已成为一门综合性应用新技术,它涉及以下基础技术:(1)图形处理技术。
如二维交互图形技术,三维几何造型技术及其它图形输入输出技术;(2)工程分析技术。
如有限元分析,优化设计方法,物理特性计算,模拟模拟以及各行业的工程分析;(3)数据管理与数据交互技术。
如数据库管理,不同的CAD系统间的数据交换和接口等;(4)文档处理技术,如文档制作,编辑及文字处理等;(5)软件设计技术。
1.2 基于参数化设计的意义 参数化技术的出现使CAD技术的一次重大革命,在此之前的造型技术都属于约束自由造型。
考察机械制造全过程可以发现,在设计一个新产品时,约70%-80%的成本是在设计阶段确定的,后继工艺规划及产品加工过程中所采用的各种措施对成本的影响有限。
因此,采用先进的设计方法和 工具以提高设计效率十分重要。
针对这一系列问题,参数化技术就应运而生。
对于结构比较定形的产品,建立参数化模型,通过调整参数,修改控制几何形状,自动实现产品的精确造型可大大提高产品的设计效率和 设计质量。
参数化设计方法在不断的发展和完善,早期的参数化设计方法主要应用于二维图形由于二维图形的局限性,使其推广应用受到局限,因此三维实体参数化设计方法的研究越来越受到重视。
三维实体参数化设计方法不但弥补了二维设计的局限性,而且设计者设计产品时,头脑中总时先形成三维模型,三维实体建立好以后,再将其转化为二维工程图,这样就更符合人们的思维习惯。
参数化设计方法与传统方法相比较。
最大的不同在于它储存了 设计的全过程,能设计出一组而不时单一的产品模型。
它使设计人员不需要考虑细节而尽快草拟零件图,并可以通过变动某些参数来更新设计,而不必运行产品的整个设计过程。
参数化技术避免的重复劳动,避免了资源浪费。
在产品的开发设计阶段应用参数化设计,能提高 产品的设计效率,缩短新产品的开发周期,使设计人员从繁重的计算和绘图中解脱出来。
将主要的经历放在创造性的设计工作中去。
因此,它 成为进行初始设计,产品模型编辑修改,多种方案设计和比较的有效手段,深受工程设计人员的欢迎。
1.3 背景及本文所做的工作 在机械设计中,利用UG的三维实体造型功能和虚拟装配功能,能使产品开发周期大大缩短,设计的可靠性大大提高。
本课题以钢丝包装机为研究对象,在实际生产生活中,为了保护产品及运输的方便,要对钢丝进行包装,传统的人工包装效率低而且包装的质量也不好,所以有必要设计出自动包装钢丝的机械,对钢丝进行快速且高质量的包装,用UG对其进行设计和虚拟装配将大大提高设计效率和设计质量。
本课题的主要工作集中在三个方面:一是生成钢丝包装机的各个零件;二是在各个零件的基础上对钢丝包装机进行虚拟装配,并检查安装在钢丝包装机上的各零件是否存在干涉现象。
三是对所安装的钢丝包装机进行运动模拟,检查钢丝包装机的运动性能是否合理。
2 基于UG的钢丝包装机设计方案 用UG 的三维实体造型功能生成钢丝包装机的各个零件,然后在虚拟装配功能下在各个零件的基础上对钢丝包装机进行虚拟装配,并检查安装在钢丝包装机上的各零件是否存在干涉现象。
数据,主要零件参数见表1。
表1 钢丝包装机主要零件参数表 叠合范围 任意重叠(可调) 包装材料 编织带(或其他缠绕材料) 钢丝宽度W W ≤500mm 钢带外径OD 800mm ≤OD ≤1400mm 钢带内径ID 450mm ≤ID ≤1000mm 环体转速v v ≤40r /min (变频控制) 托辊高度 约500mm 托辊承重 ≤2000kg 总 功 率 约3kw 电压/频率 3¢380V /50Hz 重 量 约 约2000kg 2.1 最终模型图及工作原理89 10 1 2 3 4 5Ø 当钢丝放到底座的滚轴上时,可以通过升降手轮1来调整面板到合适的高度,然后转动手轮6,通过四个固定滑轮8使钢丝准确的固定在底座的正中间;Ø 在电机的带动下,4开始旋转,从而通过皮带5带动另一滚轴以同速同向的运动转动使钢丝在滚轴摩擦力作用下以开始滚动,其滚动速度可能通过调整电动机的速度来实现;Ø 同时,另一电动机带动主轴10转动,主轴10通过面板后的皮带带动其它三个滚轮一起以同速同向转动,从而在摩擦力的作用下带动胶带环9以一定的方向旋转;Ø 在两个运动同时作用下,使在3上装的胶带准确、快速的缠绕在钢丝上.完成对钢丝的自动化包装.2.2三大运动系统的实现和调节 2.2.1钢丝定位运动系统2.3.2 钢丝的滚动运动系统123 Ø 通过旋转手轮3使滑轮1和滑轮2以同速相对运动,从而迅速而准确的实现钢丝的定位 23 Ø 用4000W的电机通过带传动带动轴1转动,轴1通过三角带与轴4相连,从而使两滚轮2同速同向转动,使放在上面的钢丝按预定的速度和方向滚动。