Swarm类库介绍
Swarm 的安装与使用

Swarm 的安装与使用2006年10月26日星期四上午09:11一、Swarm的安装Swarm是基于Objective C 和X Windows 开发的一种GNU软件,可以运行在Solaris,Linux,Sco Unix HP/UX等多种操作系统平台之上。
1998年初,又发布了Swarm的Windows 95/NT 版。
目前,其最新版本为2.0.1版。
有关Swarm的详细信息可以查阅Swarm的官方网页。
下面我们以Swarm 2.0.1版为例分步骤介绍Swarm的下载和安装。
1、平台l Unix。
Swarm几乎可以运行在所有流行的Unix系统上,如SunOS 4.1.3,Solaris,Linux(如Redhat,Debian等),HPUX 9/11,irix 5.3/6.4,以及MachTen/68k等。
一个Unix系统能否支持Swarm主要取决于两点:1)该系统是否支持GNU Objective C,2)该系统是否支持libffi或ffcall。
Swarm for Unix提供了二进制和源代码两个版本。
二进制版指的是Swarm的开发者已经在特定的操作系统和机型上将所需的库都编译好了,因此下载后在相同环境的机器上可以直接使用,不需要编译,也不需要另外安装支持库(但需要支持软件)。
二进制版安装方便,但只支持Debian Linux 2.2,Redhat Linux 6.0 和Solaris 2.7这三个操作系统。
最灵活的方式还是安装源代码版。
l Windows。
Swarm已经被移植到Windows上,支持包括95,98,NT等多种平台。
在Windows 下的安装非常简单,只需先安装Cygnus Win32环境,再安装Swarm软件包就可以了。
其中,Cygnus Win32可以从ftp:///pub//pub/cygwin/cygwin-b20/full.exe处下载,Swarm for Windows可以从ftp:///pub/swarm/swarm-2.0.1.exe处下载。
SWARM—一个支持人工生命建模的面向对象模拟平台 (1)

SWARM—一个支持人工生命建模的面向对象模拟平台Swarm官方网站:转载自系统仿真学报2002年第5月丁浩, 杨小平(中国人民大学信息学院, 北京 100872)摘要:简要介绍了系统科学中引人注目的复杂适应系统(CAS)理论,以及在美国桑塔费研究所开发的一个模拟工具集——Swarm。
Swarm平台可以支持研究者对复杂适应系统使用多主体模拟(Multi-Agent Simulation)的方法来开展研究工作。
本文还介绍了Swarm的基本结构和工作原理,并且还结合一个实例简要阐述了模型的设计与实现过程,试图为复杂系统提供一个崭新的研究思路。
关键词:复杂适应系统(CAS); Swarm; 主体(Agent); 适应性; 遗传算法SWARM An Object-Oriented Platform to Construct Artificial Life ModelDING Hao, YANG Xiao-ping(Information School, Renmin University of China, Beijing 100872, China)Abstract: This paper introduces the theory of Complex Adaptive System (CAS). It also recommends a software utility Swarm that allows researchers to construct discrete event simulations of complex systems with heterogeneous agents. In the end, we carry out an example Life Game, to help the readers to grasp the modeling method of constructing CAS.Keywords: complex adaptive system (CAS); Swarm; agent; adaptability; genetic algorithms (GA)1 复杂适应系统(CAS)介绍以复杂性研究为主流的当前的新的发展阶段,我们可以看到系统科学的发展经历了从元素数量较少、关系比较单纯的系统的过程,到元素个数较多,研究系统自身演化与发展的过程,到现在元素具有主动性,能与外界交流并会根据经验改变自身的动态系统的过程。
Swarm平台技术介绍与应用

Swarm Mode:总结
• 部署特别简洁
• 无任何依赖,只需安装Engine + 一个命令 • 无中心架构
• 部署高可用服务
• Service API + RoutingMesh
• Secure by default:
• 自带证书颁发、更新功能,Manager与Worker之间通过
SSL连接
Swarm Mode:总结
Swarm:API
• 高度兼容Docker Engine API
• 集群级汇总
• 转发到相应节点的Docker Daemon
• 在集群中广播
• 单个容器级别的API
Swarm:调度
• 资源调度
• 资源维度: CPU / Memory / 端口
• CPU / Memory支持超卖
• 调度策略:spread / binpack
• 不支持优先级、抢占
Swarm:调度
• 节点约束
• 节点名:constraint:node==XXX
• 标签:constraint:key==value
• 亲和性
• 镜像:affinity:image==foo
• 服务:affinity:service==foo
Swarm:总结
• 部署简洁
• 只依赖KV Store和Docker Daemon
• 阿里云专有云输出
• 阿里云容器服务 • 阿里云高性能计算、HPC
阿里云容器服务 整体架构
ECS
Networking Networking
阿里云容器Hub
用户独有的计算资源 Container Cluster for customer A V M N o d e V M N o d e VM Node
Swarm使用说明

Java Swarm使用简介SWARM的安装和设置 (1)命令行环境下JA V A版SW ARM 2.2的安装 (1)集成开发环境(IDE)中JA V A版SW ARM 2.2的安装 (4)使用Java Swarm建模 (7)一、Swarm建模简介 (7)计算机仿真的一般特点 (7)Swarm的基本特点 (7)Swarm仿真的基本步骤 (8)二、Swarm结构 (8)模型Swarm (8)观察者Swarm (8)三、Swarm编程和仿真 (9)面向对象编程简介 (9)JA V A类示例 (9)Swarm编程 (10)构造函数做了些什么? (10)buildObjects方法做了些什么? (10)buildActions方法做了些什么? (10)合并Swarm中的时间表(activateIn方法) (10)Swarm的图形用户界面(GUI) (10)Swarm GUI的元素 (10)创建一个可点击的平面图(ZoomRaster) (11)图形化显示结果 (11)探测并显示Swarm对象的内容 (12)参考文献: (13)SWARM的安装和设置安装Swarm建模平台,首先需要安装编程语言(JAVA)的环境及Swarm软件。
安装后,需要设置三个环境变量。
首先,CLASSPATH必须包含文件swarm.jar 和kawa.jar,这两个文件一般在share/swarm子目录下。
其次,在windows系统中,需要将javaswarm.dll包括在path中。
最后,需要设置SWARMHOME为swarm 的安装目录,如c:/Swarm-2.2-java。
以Windows XP下Java版Swarm 2.2为例,详细介绍Swarm安装过程。
命令行环境下JAVA版SWARM 2.2的安装1.下载并安装JAVA编译器及运行引擎,也就是JDK。
JDK可从网站上免费下载。
2.下载并安装SWARM 2.2。
可从SWARM的官方网站免费下载SWARM 2.2 的安装文件,文件名为Swarm-2.2-java.zip。
容器编排工具Docker Compose与Docker Swarm的对比和选择

容器编排工具Docker Compose与DockerSwarm的对比和选择随着云计算和容器化技术的快速发展,容器编排工具成为了管理和部署容器化应用的关键工具。
在众多容器编排工具中,Docker Compose和Docker Swarm是备受关注的两个工具。
本文将对它们进行对比,并探讨在不同场景中的选择。
Docker Compose是一种用于定义和运行多个Docker容器的工具。
它使用YAML文件来定义容器和服务之间的依赖关系,并提供了命令行工具来管理容器集群。
Docker Compose适用于开发和测试环境,特别是对于单主机上运行的应用,它可以轻松地启动、停止和重新配置容器。
而且,Docker Compose对于本地开发环境的模拟和快速迭代非常有用,开发人员可以在自己的开发环境中轻松运行复杂的应用。
然而,当应用需要在多台主机上进行部署时,Docker Compose的能力就受到限制了。
这就是Docker Swarm登场的原因。
Docker Swarm是Docker原生的集群管理工具,它可以将多个Docker主机组成一个虚拟集群,并提供了一致的API和命令行工具来管理容器集群。
它可以根据应用的负载自动处理容器的分布和调度,实现高可用性和负载均衡。
与Docker Compose相比,Docker Swarm具有更高的可扩展性和可靠性。
通过在集群中增加或减少主机,可以方便地扩展或缩减应用的容量。
而且,Docker Swarm还支持故障转移和服务发现,当某个节点发生故障时,它会自动将容器转移到其他可用节点上,保证应用的可用性。
另外,Docker Swarm还支持动态卷和网络管理,使得在分布式环境中部署和管理应用更加便捷。
当选择使用Docker Compose还是Docker Swarm时,需要根据实际需求来进行权衡。
如果应用规模较小,只在单一主机上运行,或者本地开发和测试,那么Docker Compose是一个简单而有效的选择。
swarm中文手册

Swarm用户指南Swarm开发组Paul Johnson堪萨斯州大学政治科学系pauljohn@Alex Lanchaster圣塔菲研究所alex@译者柳泉波北京师范大学信息学院brookwithy@Swarm用户指南Swarm开发组Paul Hohnson 和Alex Lancaster2000年4月10日出版Copyright © 1999-2000 Swarm开发组Swarm仿真系统的用户指南本文档是由CASA有限公司的Benedikt Stefansson(以前在UCLA的经济系工作)在1998和1999年的SwarmFest上发表的Swarm教程材料发展而来的。
分三个阶段逐步深入的讨论了Swarm工具:第一部分是Swarm的简介;第二部分深入地剖析了Swarm程序;第三部分则详细讨论了用户在使用Swarm开发程序时可那遇到的种种问题。
鼓励用户探索Swarm提供的样例程序,并访问Swarm站点()来了解最新消息和加入Swarm邮件列表。
Paul Johnson的工作,由国家科学基金会的基金(SBR-9709404)部分支持。
Paul是主要的作者,提供了《指南》的主要材料。
Alex Lancaster负责有关SGML的大部分工作——即在DocBook(见书末)中的锤炼和标记问题,并提供了补充材料和正文。
有关Swarm用户指南的许可说明复制本文档需要预先获得版权持有者(Swarm开发组)的书面版权许可,合理的个人使用或者用于教育目的不在此禁。
不允许大量分发本文的复制品或者将之用于牟利。
生成本文档的SGML源文件以及相关程序在文件包userbook-0.9.tar.gz (ftp:///pub/swarm/userbook-0.9.tar.gz)。
只要遵循GNU一般公共许可(GPL,/copyleft/gnu.html),那么使用、复制、修改和分发swarmdocs包及其生成的文档(包括HTML、TeX、dvi、PostScript和RTF格式)是允许的。
Swarm在基于agent复杂系统建模与仿真中的应用
结合著名的“热虫(Heatbugs)实验”实例,说明了利用Swarm进行模型的设计与实现过程,指出利用Swarm能够简单快速地进行复杂系统的建模与仿真,有助于形象直观地领悟到复杂现象的本质,加强对复杂系统的理解。
关键词:Swarm,多agent,复杂适应系统,建模,仿真中图分类号:N941.41.引言复杂系统一直以来都是国内外研究的热点[1,2]。
在复杂系统中,存在着大量的交互成分,系统内部关系复杂、不确定,总体行为具有非线性,既不能根据系统的全部局部属性来重构总体属性,也不能通过系统局部性质来形式地或抽象地描述整个系统的特性。
因此,迄今为止对复杂系统的研究还没有形成从微观到宏观的理论,也没有从子系统相互作用出发构筑起来的统计力学。
但是,美国圣塔菲研究所(SFI,Santa Fe Institute)推出的复杂适应系统(CAS)理论代表着复杂系统理论的一个重要方向,适合解决一大类复杂系统问题。
复杂适应系统理论认为适应性造就复杂性[3]。
它以Agent为核心概念,采用基于Agent的建模方法[4,5]将复杂系统中各个仿真实体用Agent来建模,试图通过对复杂系统中的基本元素及基本元素之间的交互进行建模与仿真,将复杂系统的微观行为和宏观涌现现象有机地结合到一起,是一种自顶向下分析、自底向上综合的建模方式,为复杂系统的研究提供了一个有效的途径。
本文首先介绍了由霍兰教授提出的复杂适应系统理论,分析、阐述了用于研究复杂系统的多agent建模与仿真方法。
然后详细论述了由圣塔菲研究所(SFI)开发的可编程的建模工具Swarm软件逻辑结构和基本原理,并通过实例说明如何采用基于多agent的复杂系统建模与仿真方法,简单快速地进行复杂系统(如经济系统、社会系统、生态系统等)的建模与仿真,以便形象直观地领悟到复杂现象的本质,加强对复杂系统的理解。
2.基于多Agent的复杂系统建模与仿真2.1复杂适应系统理论复杂适应系统(Complex Adaptive System,CAS)是由J.Holland在1994年正式提出的[3,6]。
docker-swarm的运用
docker-swarm的运⽤写了如何使⽤docker-compose来部署服务。
虽然docker-compose解决了docker间通信问题,但是缺点也是很明显的。
就是只能在⼀台宿主机上通信。
我们使⽤docker-compose在宿主机上部署了20+的应⽤,宿主机配置 16C 32GB RAM。
服务全部启动后,常态内存占⽤就⾼达85%。
显然是⽆法应对突发情况的,因此如果服务⽐较多,仅仅使⽤docker-compose是不够的。
因此我们使⽤docker-swarm来部署服务。
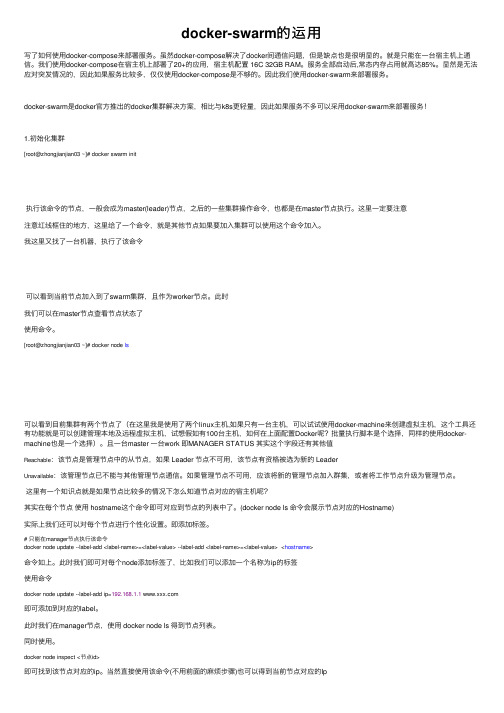
docker-swarm是docker官⽅推出的docker集群解决⽅案,相⽐与k8s更轻量,因此如果服务不多可以采⽤docker-swarm来部署服务!1.初始化集群[root@zhongjianjian03 ~]# docker swarm init执⾏该命令的节点,⼀般会成为master(leader)节点,之后的⼀些集群操作命令,也都是在master节点执⾏。
这⾥⼀定要注意注意红线框住的地⽅,这⾥给了⼀个命令,就是其他节点如果要加⼊集群可以使⽤这个命令加⼊。
我这⾥⼜找了⼀台机器,执⾏了该命令可以看到当前节点加⼊到了swarm集群,且作为worker节点。
此时我们可以在master节点查看节点状态了使⽤命令。
[root@zhongjianjian03 ~]# docker node ls可以看到⽬前集群有两个节点了(在这⾥我是使⽤了两个linux主机,如果只有⼀台主机,可以试试使⽤docker-machine来创建虚拟主机,这个⼯具还有功能就是可以创建管理本地及远程虚拟主机,试想假如有100台主机,如何在上⾯配置Docker呢?批量执⾏脚本是个选择,同样的使⽤docker-machine也是⼀个选择)。
且⼀台master ⼀台work 即MANAGER STATUS 其实这个字段还有其他值Reachable:该节点是管理节点中的从节点,如果 Leader 节点不可⽤,该节点有资格被选为新的 LeaderUnavailable:该管理节点已不能与其他管理节点通信。
用文字叙述swarm工作流程

用文字叙述swarm工作流程
从1994年开始,桑塔费研究所(SFI)开展了一个研究项目,以开发一个工具集用来帮助科学家们分析复杂适应系统,这个模拟工具集就叫做Swarm。
1995年,SFI发布了Swarm的beta版。
用户可以使用Swarm提供的类库构建模拟系统,使系统中的主体和元素通过离散事件进行交互。
由于Swarm没有对模型和模型要素之间的交互作任何约束,Swarm应当可以模拟任何物理系统或社会系统。
事实上,在各个广泛的研究领域都有人在用Swarm编写程序,这些领域包括生物学、经济学、物理学、化学和生态学等。
Swarm项目的目的就是通过科学家和软件工程师的合作制造一个高效率的、可信的、可重用的软件实验仪器。
它能给予科学家们一个标准的软件工具集,就象提供了一个设备精良的软件实验室,帮助人们集中精力于研究工作而非制造工具。
Swarm实际上是一组用Objective-C语言写成的类库,这是一种面向对象的C语言。
一部分图形界面,如图表、按钮和窗口是用TCL/TK 描述的。
Swarm最初只能在Unix操作系统和X Windows界面下运行,1998年四月,伴随着1.1版的发布,Swarm推出了可以在Windows 95/98/NT上运行的版本。
1999年,Swarm又提供了对Java的支持,从而使Swarm越来越有利于非计算机专业的人士使用。
python 库 粒子群算法

python 库粒子群算法粒子群算法是一种基于群体智能的优化算法,常用于解决复杂的优化问题。
它模拟了自然界中鸟群、鱼群等群体行为的思想,通过群体中的个体之间的信息传递和相互协作,找到全局最优解。
Python提供了一些库可以帮助我们实现粒子群算法,并应用于各种优化问题。
下面将介绍几个常用的Python库和它们在粒子群算法中的应用。
1. PySwarm:PySwarm是一个强大的粒子群优化(PSO)库,它提供了丰富的功能和灵活的接口,可以用于解决各种优化问题。
它使用Python语言实现了标准的粒子群算法,并提供了多种适应性函数和优化目标函数的定义方式。
通过PySwarm,我们可以快速构建并解决自己的优化问题,从而得到满足要求的最优解。
2. DEAP:DEAP是一个用于进化计算的Python库,也可以用于实现粒子群算法。
它提供了进化算法和进化策略中常用的工具和方法,并支持多种遗传进化搜索算法的实现。
DEAP中的粒子群算法模块可以方便地创建并运行粒子群算法,并通过自定义适应度函数和问题参数来优化不同的目标。
3. PyGMO:PyGMO是一个高性能的开源优化库,可以用于求解优化问题和执行各种优化算法,包括粒子群算法。
它提供了多种算法实现和问题建模的方式,支持并行计算和多线程优化,并提供了友好的Python接口和可视化工具。
PyGMO可以帮助我们快速构建并解决各种优化问题,并得到高质量的优化结果。
4. Optunity:Optunity是一个基于Python的优化库,提供了多种优化算法和搜索方法的实现。
它可以用于解决参数选择、模型优化等问题,也可以用于实现粒子群算法。
Optunity支持自定义目标函数和约束条件的定义,通过灵活的接口和参数设置,可以用于解决各种复杂的优化问题,并得到满意的优化结果。
以上是几个常用的Python库,在粒子群算法中的应用。
它们提供了灵活多样的接口和强大的功能,可以帮助我们快速构建并解决各种优化问题。
使用Docker Swarm进行容器化的分布式任务调度的最佳实践

使用Docker Swarm进行容器化的分布式任务调度的最佳实践传统的任务调度方式经常面临着许多挑战,如复杂的配置、资源利用率低下以及可伸缩性限制等。
然而,随着容器化技术的不断发展,越来越多的企业选择采用Docker Swarm进行分布式任务调度。
本文将介绍使用Docker Swarm进行容器化的分布式任务调度的最佳实践,并探讨其中的优势和挑战。
一、什么是Docker SwarmDocker Swarm是Docker官方推出的用于容器编排和调度的集群管理工具。
它允许用户在多个主机上部署和管理容器化应用程序,并提供高可用性、弹性伸缩以及负载均衡等功能。
与传统的任务调度方式相比,Docker Swarm通过自动分配任务到合适的节点,大大提高了资源利用率和系统的可伸缩性。
二、容器化的分布式任务调度最佳实践1. 设计合理的集群架构在使用Docker Swarm进行容器化的分布式任务调度之前,首先需要设计合理的集群架构。
可以考虑使用多层级的集群,将不同的主机组织成逻辑集群,以实现更好的资源管理和任务调度。
同时,还可以配置Swarm中的服务发现和负载均衡机制,以确保容器化应用程序的高可用性和性能。
2. 利用标签进行任务调度Docker Swarm提供了灵活的标签筛选功能,可以根据容器的标签选择合适的节点进行任务调度。
通过合理设置标签,可以实现按照应用程序类型、资源需求、地理位置等特点进行任务调度,提高容器化应用程序的性能和效率。
3. 使用服务模式进行应用程序管理Docker Swarm的服务模式可以方便地管理容器化的应用程序。
通过定义服务的副本数和容器的资源需求,Docker Swarm可以自动进行任务调度和负载均衡。
同时,通过更新服务的镜像版本,可以实现应用程序的无缝升级,提供更好的用户体验。
4. 监控和日志管理在使用Docker Swarm进行容器化的分布式任务调度时,监控和日志管理是至关重要的。
可以使用各种监控工具和日志收集器,如Prometheus、Grafana和ELK 等,对容器化应用程序和集群进行实时监控和日志管理。
使用Jenkins和Docker Swarm进行自动化部署的架构设计(三)

使用Jenkins和Docker Swarm进行自动化部署的架构设计引言随着软件开发的快速发展,自动化部署成为了一个关键的环节。
自动化部署可以提高开发效率、降低错误率,并且能够快速响应市场需求。
本文将介绍如何使用Jenkins和Docker Swarm进行自动化部署的架构设计。
一、Jenkins与Docker Swarm的介绍Jenkins是一个开源的自动化构建工具,它提供了构建、测试和部署应用程序的一系列功能。
Docker Swarm是Docker官方提供的一个容器编排工具,它可以轻松管理多个Docker节点,并且实现应用程序的高可用性和负载均衡。
二、架构设计概述在使用Jenkins和Docker Swarm进行自动化部署之前,我们需要先设计一个合适的架构。
一个典型的架构如下图所示:[图1:Jenkins和Docker Swarm自动化部署架构图]在这个架构中,Jenkins负责代码构建和测试,然后将构建好的Docker镜像推送到Docker仓库中。
Docker Swarm负责从Docker仓库中拉取镜像,并在集群中部署应用程序。
整个过程中,Jenkins和Docker Swarm通过API进行通信。
三、Jenkins与Docker Swarm的配置1. 配置Jenkins首先,我们需要在Jenkins中安装相关插件,例如Docker插件和SSH插件,以便能够与Docker Swarm集群进行交互。
然后,我们需要配置Jenkins的构建任务,包括源代码的获取、构建过程和测试过程等。
2. 配置Docker Swarm在Docker Swarm集群中,我们需要配置一个主节点和多个工作节点。
主节点负责管理整个集群的状态,并将任务分发给工作节点进行处理。
工作节点负责在自己的主机上运行容器,并接收主节点的指令。
四、自动化部署流程一旦我们完成了Jenkins和Docker Swarm的配置,我们就可以开始自动化部署的流程了。
使用Docker Swarm进行容器化应用的集群管理

使用Docker Swarm进行容器化应用的集群管理随着云计算和容器技术的发展,容器化应用已成为现代软件开发和部署的主流方式。
而在大规模应用中,如何有效管理和部署容器化应用就显得尤为重要。
Docker Swarm作为Docker官方提供的容器集群管理工具,可以帮助我们轻松地管理和扩展容器化应用,提供了一种灵活且高效的解决方案。
1. 什么是Docker SwarmDocker Swarm是Docker官方提供的一种容器集群管理工具,它基于Docker引擎构建而成,可以将多个Docker主机组成一个集群,对外提供一个统一的接口。
借助Docker Swarm,我们可以将容器化应用分布在多台主机上,实现高可用性和负载均衡。
2. Docker Swarm的特性2.1 高可用性通过使用Docker Swarm,我们可以将多个Docker主机组成一个集群,其中一个节点可以作为主节点,负责管理整个集群的状态和任务调度。
当主节点出现故障时,集群内的其他节点可以自动选举一个新的主节点,确保集群的稳定运行。
2.2 负载均衡Docker Swarm可以自动将容器分配到不同的主机上,实现负载均衡。
通过在Swarm集群中使用代理机制,请求可以根据不同的算法(如轮询、随机)分发到不同的容器实例,从而实现对负载的均衡和响应能力的提升。
2.3 服务发现Docker Swarm提供了内置的服务发现机制,可以让容器之间轻松地相互通信。
每个容器都可以通过服务名称访问其他容器,而不需要关心具体的IP地址或端口号。
这使得容器化应用的部署和扩展变得更加方便和灵活。
3. Docker Swarm的使用3.1 集群初始化在使用Docker Swarm之前,需要先初始化一个Swarm集群。
可以通过运行命令`docker swarm init`来创建一个Swarm主节点。
初始化完成后,会生成一个加密令牌,其他节点可以使用这个令牌加入集群。
3.2 添加节点要将其他Docker主机加入到集群中,可以使用初始化时生成的加密令牌。
lua sqlite3 事务写法

一、Lua语言简介Lua是一种轻量级的脚本语言,广泛用于游戏开发、嵌入式系统以及各种应用程序的脚本化。
它是一种动态类型的脚本语言,具有简洁而灵活的语法,易于学习和使用。
在Lua语言中,可以方便地调用外部C/C++代码,因此也被广泛用于扩展其他语言的功能。
二、SQLite3数据库简介SQLite3是一个轻量级的数据库引擎,它以其小巧、快速、可靠的特性而备受开发者青睐。
SQLite3是一种嵌入式的数据库引擎,不需要独立的服务器进程,而是直接在应用程序中使用。
对于一些小型的应用程序来说,SQLite3是一个理想的数据库解决方案。
三、事务的概念在数据库操作中,事务是一组操作单元,要么全部成功执行,要么全部失败回滚。
事务可以确保数据库中数据的完整性和一致性。
对于一些需要保证数据的安全性和可靠性的应用场景,事务就显得尤为重要。
四、Lua中对SQLite3进行事务操作在Lua中,可以使用SQLite3的API对数据库进行事务处理。
在SQLite3数据库中,事务可以通过BEGIN、COMMIT和ROLLBACK来进行开启、提交和回滚。
下面我们将介绍如何在Lua中利用SQLite3进行事务控制。
五、事务的开启在Lua中,使用SQLite3的API可以很方便地开启一个事务。
使用SQLite3的connect函数连接数据库,然后使用其execute函数执行BEGIN语句,即可开启一个事务。
[代码示例]```local sqlite3 = require "lsqlite3"local db = sqlite3.open("test.db")db:execute("BEGIN")```六、事务的提交在数据操作完成后,如果所有的操作都执行成功,可以使用COMMIT 语句来提交事务,将之前的操作永久保存到数据库中。
[代码示例]```db:execute("COMMIT")```七、事务的回滚如果在事务期间发生了错误或者需要取消之前的操作,可以使用ROLLBACK语句来回滚事务,将数据库恢复到事务开始之前的状态。
Swarm主要类与方法

Swarm for Java一、Swarm模型程序结构表2-1 Swarm模型的程序结构二、Swarm的类库结构:Swarm、Activity、Analysis、Collections、Defobj、Gui、Objectbase、Simtools、Random、Simtoolsgui、Space。
三、Swarm的基本类表9-1 Swarm库的方法介绍表9-2 SwarmEnvironmentImpl类的主要变量表9-3 Globals类的常用方法2.Selector类选择器由swarm.Selector类来实现。
Selector(ng.Class ng.String methodName,boolean theObjcFlag)。
这里的3个参数,他们的意义分别是:定义方法的类;表示动作的方法名,方法包含在前面定义方法的类中;一个是否允许适用男Objective-C 方法的布尔值,如果不实用Obfective-C的羽凡,则该标志应该为false,否则为true。
四、主体集合的操作表10-1 Swarm.Collection包中的类1.数组操作类表10-2 ArrayImpl类的常用方法2.字符串操作类表10-3 StringImpl类的常用方法3.主体链表的基本操作类表10-4 ListImpl类的常用方法4.主体链表的映射处理类表10-5 MapImpl类的常用方法五、随机数的产生表10-6 Swarm.Random包中的类1.均匀分布随机数类表10-7 UniformDoubleDistImpl类的常用方法2.正态分布表10-8 NormalDistImpl类的常用方法3.对数正态分布随机数类表10-9 LogNurmalDistImpl类的常用方法4.指数分布随机数类表10-10 ExponentialDistImpl类的常用方法5.伽玛分布随机数类表10-11 GammaDistImpl类的常用方法六.Swarm的基本操作表10-12 Swarm的defobj类库1.Arguments类表10-13 Arguments类的常用方法2.HDF5Impl表10-14 HDF5Impl类的常用方法3.Zone类表10-15 Zone类的常用方法七.集合创建与调度表11-1 Swar.Activity包中的类1.行为集合创建表11-2 ActionGroupImpl类的常用方法2.序列时间调度表11-3 ScheduleImple类的常用方法3.并发事件调度八、对象集合的管理表11-5 Swarm.Simtools包中的类容1.随机选择对象表11-6 NselectImpl类的常用方法2.集合对象排序表11-7 QsortImpl类的常用方法3、标记对象表11-8 UnameImpl类的常用方法九.环境变量观测显示器表11-9 Swarm.Objectbase包中的类1、变量观测器表11-10 VarProImpl类的常用方法2、行为观测器表11-11 MessageProbeImpl类的常用方法3、行为与变量观测显示表11-12 EmptyProbeMapImpl类的常用方法4、关联变量和类表11-13 ProbeLibraryImpl类的常用方法十.统计分析结果显示表12-1 Swarm.analysis类库1.统计分析函数表12-2 AveragerImpl类的常用方法2.时序曲线图表12-3 EZGraph类的常用方法3、绝对量的柱状图表12-4 swarm.analysis.EZBinImpl类的常用方法5、数据分布柱状图表12-5 EZBin类的常用方法十一、图形界面显示表12-6 SwarmGui包中的类1、构建调色板表12-7 ColormapImpl类的常用方法2、构建光栅表12-8 RasterImpl类的常用方法3、显示一个二维栅格表12-9 ZoomRasterImpl类的常用方法4、在图框中画图形表12-10 GraphImpl类的常用方法5、在画板上画图形表12-11 在面板上作图类的相关方法介绍十二、二维空间及显示设计表12-12 SwarmSpace包中的类1、二维离散空间表12-13 Discrete2dImpl类的常用方法2.二维空间汇总值的显示表12-14 Value2dDisplay类的常用方法3、二维对象空间表12-15 Grid2dImpl类的常用方法4、二维空间中对象的显示表12-16 Object2dDisplayImpl类的常用方法十三、仿真控制面板设计表12-17 Swarm.simtoolsgui类介绍1、观测设计步骤2、控制面板设计表12-18 GUISwarmImpl类的常用方法4.通过界面对变量与行为进行观测表12-19 ProbeDisplayManagerImpl类的常用方法。
供应链建模与仿真8_Swarm仿真程序的建立

2010-4-72010-4-7主要内容Swarm仿真程序的建立Swarm仿真程序的层次结构 Swarm仿真程序的建立步骤2010-4-72010-4-71. Swarm仿真程序的层次结构Swarm仿真程序的层次结构Widgets ProbesModelSwarmObserverSwarm 仿真程序ObserverSwarmAgentsAgents和环境ModelInanimate objects 模型视图2010-4-71.1 ModelSwarm: Swarm2010-4-71.2 ObserverSwarm: SwarmObserverSwarm的作用是通过探测器接口观察ModelSwarm 是仿真程序的核心。
1)ModelSwarm 是一个主体对象的容器,定义了模型 中出现的Agent的种类、每一类Agent的数目和这些 Agent活动的环境;它包含了模型的一切对象(用户界面 对象除外) 2)ModelSwarm定义了模型中Agent行为执行顺序的动 作序列表,通过产生一系列具有特定顺序的行为或具有因 果关系的事件来体现模型中的各个Agent之间的交互。
ModelSwarm还包括一系列输入和输出参数。
ObserverSwarm也是一个Swarm对象,它也包 括一个动作序列表,这个动作序列表描述各个探测器 采样的间隔和顺序。
ModelSwarm对象中各个主体状态的变化,并以图 形的方式输出。
2010-4-71.3 仿真主体和环境Agent : SwarmObjectSwarm仿真过程中,模型中的Agent与现实系统中的2010-4-71.4 Swarm仿真程序的层次结构个体是一一对应的。
Agent通常作为一组对象在仿真系 统中存在,它们都是SwarmObject类的子类。
这些Agent 都有各自的属性和方法,具有一定的学习能力和自适应 性,并通过离散事件进行交互。
仿真主体通常生活在一个环境中,环境本身也可以 看做一个仿真主体。
pyswarm 实例

pyswarm 实例使用`pyswarm`库实例化粒子群优化器并进行优化可以参考以下步骤。
请注意,此代码是基于`pyswarm`库提供的默认参数,可能需要根据你的特定问题调整参数。
首先,需要导入所需的库和函数:```pythonfrom pyswarm import psoimport numpy as np```然后,定义一个优化目标函数。
这里以一个简单的二次函数为例:```pythondef obj_func(x):return sum(x2)```接下来,定义约束条件。
在这个例子中,假设没有约束条件:```pythondef constraint_func(x):return _like(x) 0 返回0表示无约束条件```然后,设置粒子群优化器的参数。
这里以一个有10个粒子的粒子群为例:```pythonoptions = {'c1': , 'c2': , 'w': } 粒子群优化器的参数bounds = [(-5, 5)] len(x) 变量的上下界```最后,实例化粒子群优化器并执行优化:```pythonx = (-5, 5, len(x)) 初始化粒子的位置和速度cost, x = pso(obj_func, x, bounds, constraint_func=constraint_func, options) 执行优化```在这个例子中,`pso`函数返回了目标函数的最小值和最优解的位置。
你可以根据需要修改目标函数、约束条件和参数来适应你的问题。
容器编排工具Docker Swarm的可视化界面与操作指南

容器编排工具Docker Swarm的可视化界面与操作指南近年来,随着云计算和容器技术的快速发展,Docker Swarm作为一种容器编排工具,逐渐受到了广大开发者和运维人员的关注与喜爱。
相对于其他容器编排工具,Docker Swarm具有易用性和扩展性的优势。
而对于初次接触Docker Swarm的用户来说,掌握其可视化界面与操作指南,将能更好地发挥其功能,提高工作效率。
一、Docker Swarm的可视化界面Docker Swarm的可视化界面提供了一种直观且易于掌握的方式来管理和监控容器集群。
通过可视化界面,用户可以更加方便地查看和管理容器的状态、资源使用情况、网络配置等。
同时,可视化界面还可以提供图形化的方式来创建和管理服务、容器、网络等。
例如,在可视化界面中,用户可以通过简单的拖拽操作来创建和管理服务。
只需要选择需要的镜像、设定服务的副本数和端口映射等参数,就可以轻松创建出一个新的服务。
而且,可视化界面还提供了对服务的实时监控功能,用户可以随时查看服务的运行情况和各个容器的资源使用状况。
除了服务的管理,可视化界面还支持容器和网络的管理。
用户可以通过可视化界面来查看容器的状态、日志和资源使用情况,并进行相应的管理操作,例如停止、重启或删除容器。
而对于网络的管理,用户可以轻松地创建、配置和管理不同类型的网络,以满足不同应用场景的需求。
二、Docker Swarm的操作指南在使用Docker Swarm时,掌握一些基本的操作指南将有助于提高工作效率。
以下是一些常用的操作指南:1. 初始化一个Docker Swarm集群:首先要创建一个Docker Swarm管理节点,可以使用命令行工具执行"docker swarm init"命令来完成初始化操作。
初始化后,该节点将成为Swarm集群的管理节点。
2. 加入一个Docker Swarm集群:其他节点可以通过执行"docker swarm join"命令来加入到已存在的Docker Swarm集群中。
系统建模与仿真-第21讲 SWARM建模介绍

亲的决策表 – 同时,在拷贝决策表的过程中会发生变异
• 变异1:决策表中的某一项发生任意突变 • 变异2:决策表的项数随机增加或减少 • 变异3:Agent的内部状态数增加或减少
Agent的计算能力
复杂自适应系统特点2
• 更重要的是,CAS理论认为,正是这种主 动性以及它与环境的反复的、相互的作用, 才是系统发展和进化的基本动因。
• Holland把个体与环境之间这种主动的、反 复的交互作用用‘适应”一词加以概括。 这就是CAS理论的基本思想---适应产生复 杂性。
基于Agent的计算机仿真
Agent的。什么样的简单规则能造就复杂行为 呢?该问题没有答案 – Tierra中的数字人工生命具有“任意的”自编 程能力,但却不具备良好的界面表现力 – 能否用进化的方法进化出一个直观、良好界面 的人工生命模型?
模型的预期要求
• 应该让Agent(数字生命)生活在一个二维 空间中自由移动
• 每个Agent应该是一个可以任意进化的程序 体。
Agent的输出集合
• Agent的可能输出动作为前移、左转、右转,另外 还包括繁殖自身
• 当Agent移动到的方格刚好有一个食物,则把它吃 掉
• 因此输出动作集合O={0,1,2,3} • Agent如何根据输入选择输出变成了一个映射:
– F: IO – 然而,此映射的可能性过于简单,共有3*4=12种可能
• 丘奇-图灵论题:(Church-Turing thesis)
– 宇宙中的一切计算过程都可以用图灵机来建模 – 返回
隐性适应度
• 每个Agent都有一个能量水平Energy – 吃掉食物,则增加能量:Efood – 运动能够消耗能量:Enormal, Emove,Eturn,Ep – Energy=0则Agent就会死去 – 新生的Agent会得到固定的能量Ep
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Swarm提供了丰富的软件包来支持仿真模拟,归纳起来有10类。
下面用Java语言的形式一一介绍:
(1)Swarm 库Swarm库包括3个重要的类库,即
(2) Activity库全局控制Swarm执行。
它负责控制所有Agent的动作执行顺序,保证这些动作以正确的顺序发生在正确的、可预见的时间点上。
该包是在Swarm中进行动态的、面向对象的仿真模拟的基础。
该包中包含一些类和若干种接口:ActionGroupCImp,l ActionGroupImp,l ConcurrentScheduleCImp,l ConcurrentScheduleImp,l ScheduleCImp,l ScheduleImpl等。
(3) swarm. analysis———一个分析工具的集合。
比如,在Swarm和GUI之间连续提供数据的ActiveGraphCImpl类,动态地更新文件输出流的ActiveOutFileCImpl类,将数据取平均值的
A veragerCImpl类,用来生成柱状图的EZBinCImpl类等。
(4)swarm. defobj———Objective-C语言的标准对象集。
正是这个包支持了应用于整个Swarm 开发平台的面向对象编程思想。
在这个包中定义了创建对象和分配内存时的标准模式,如ZoneCImpl类、FArgumentsCImpl类、FCallCImpl类等;提供了异常处理和调试支持,如ErrorCImpl类、WarningCImpl类等。
(5) swarm. collections———该包可参照Java语言的Java.uti.l collection来理解。
该包中提供了ArrayCImp,l ListCImp,lListShufflerCImp,lMapCImp,l PermutationCImp,l StringCImpl等类
和接口。
(6)swarm. gui———为Swarm提供图形用户界面API的包。
用户仅需在程序中声明所需用到的界面对象,并简单地定制这些对象,而无须去理会这些界面代码是如何生成的。
事实上这些界面事先用Tcl/Tk语言写成,并封装在Swarm的库文件中。
Tcl/Tk语言是一种描述性语言和窗体图形集,关于它的一些细节可查看相关资料。
该包中提供了以下类: ColormapCImp,l ColormapImp,l RasterCImp,l RasterImp,l ZoomRasterCImp,ZoomRasterImpl。
(7) swarm. objectbase———为Swarm对象和Probe提供支持。
该包中包含用户设计Agent 和Swarm所要用到的基本对象,如SwarmObjectCImp,l SwarmCImpl等类;而且充当了Probe 探测机制的对象库,包括ProbeLibraryCImp,l ProbeMapCImpl等类。
(8)swarm. random———一个随机数生成模块。
在仿真模拟实验中将大量的用到随机数,这是由实验本身存在很大随机性而决定的。
该包中含有一系列生成随机数的类和接口,如BasicRandomGenerator等;及一些概率分布类,如BernoulliDistCImpl(贝努力分布)、ExponentialDistCImpl(指数分布)、NormalDistCImpl(正态分布)等。
(9)swarm. simtools———一些通用的仿真模拟工具。
包括NSelectCImpl类(随机地从一个类集(collection)中选择N个元素)、QSortCImpl类(在一个类集中排序)等。
(10)swarm simtoolsgui————包括控制探测器运行的类,它支持两种操作模式,一种是交互式探测的图形摸索,另一种是脱机数据收集的批处理模式。
这样就可以在模型的运行过程中观察或修改变量。
Simtools还提供了数据分析和显示支持的工具,能够产生统计数据汇总和画时序图等。
(11)swarm space————该库定义了管理二维空间的各种工具允许用户将主体、环境等添加到二维空间中。