NC7SZ18中文资料
JZX-18FF中文资料

-4Z1
There pins aren't available for 2 form c
There pins aren't available for 2 form C
2.5 14- 1.2x2.2
8- 1.2x2.2
35max.
5.3
1 4
21.5max.
2 5 3
35max.
4
1
21.5max.
8-ø1.3
11-ø1.3
14-ø1.3
2C(DPDT)
3C(3PDT)
4C(4PDT)
1
3 6 9
1 4 7
2 5 8
3 6 9
1 5 9
2 6 10
3 7 11
4 8 12
Wiring Diagram
4 7
13
14
13
14
13
14
2C(DPDT)
3C(3PDT)
4C(4PDT)
CHARACTERISTICS CURVE
Initial Insulation Resistance Between coil and Contacts Dielectric Between open contacts Strength Between contact sets Operate time (at nomi. Volt.) Release time (at nomi. Volt.) Shock Resistance Vibration Resistance Humidity Ambient temperature Termination Unit weight Construction Functional Destructive 1000M , 500VAC 1500VAC 1min. 1000VAC 1min. 1500VAC 1min. 25ms 25ms 100 m/s2 1000 m/s2 1mm, 10 to 55Hz 98%RH, +40 -55 to +70 37g Dust Cover PCB & Socket
NC7系列 交流接触器 说明书

129
137
NC7-250
备注说明
kW
A
315
132
250
132
250
160
170
160
170
NC7-300
备注说明
kW
A
380
160
300
160
300
220 235
220 235
B
可加配附件
更多附件参数请查看第8页~第9页
顶挂辅助触头
空气延时头
机械联锁模块
热过载继电器
电子式过载继电器
B-024
接触器类
NJLc-GH NC7-205和NC7-250~300任1台组合
NJLc-GK NC7-205和NC7-410~475任1台组合
NC7-115~170 机械联锁
NJLc-GL NC7-205和NC7-620组合 NJLc-HH NC7-250~300任意两台组合
NJLc-HK NC7-250~300任1台和NC7-410~475任1台组合
型号
NC7-09 NC7-12 NC7-18 NC7-25 NC7-32 NC7-38 NC7-40 NC7-50 NC7-65 NC7-80 NC7-95
额定
AC-3 9
12
18
25
32
38
4050Leabharlann 658095
380V/400V
工作
AC-4 3.5
5
7.7
8.5
12
12
18.5
24
28
37
44
电流
电流规格
410A
475A
620A
本体不带辅助 触头可加装两 个顶挂辅助
NC7SZ14中文资料

−0.5V to +6V −0.5V to +6V −0.5V to +6V −50 mA +20 mA −50 mA +20 mA ±50 mA ±50 mA −65°C to +150 °C
150 °C
Recommended Operating Conditions (Note 2)
Supply Voltage Operating (VCC) Supply Voltage Data Retention (VCC) Input Voltage (VIN) Output Voltage (VOUT) Operating Temperature (TA) Thermal Resistance (θJA) SOT23-5 SC70-5 300°C/W 425°C/W 1.65V to 5.5V 1.5V to 5.5V 0V to 5.5V 0V to VCC
© 2003 Fairchild Semiconductor Corporation
DS012176
元器件交易网
NC7SZ14
Absolute Maximum Ratings(Note 1)
Supply Voltage (VCC ) DC Input Voltage (VIN) DC Output Voltage (VOUT) DC Input Diode Current (IIK) @VIN < −0.5V @VIN > 6V DC Output Diode Current (IOK) @VOUT < −0.5V @VOUT > 6V, VCC = GND DC Output Current (IOUT) DC VCC/GND Current (ICC/IGND) Storage Temperature (TSTG) Junction Temperature under Bias (TJ) Junction Lead Temperature (T1); (Soldering, 10 seconds) Power Dissipation (PD) @ +85°C SOT23-5 SC70-5 200 mW 150 mW 260 °C
NCP1117DT18G资料
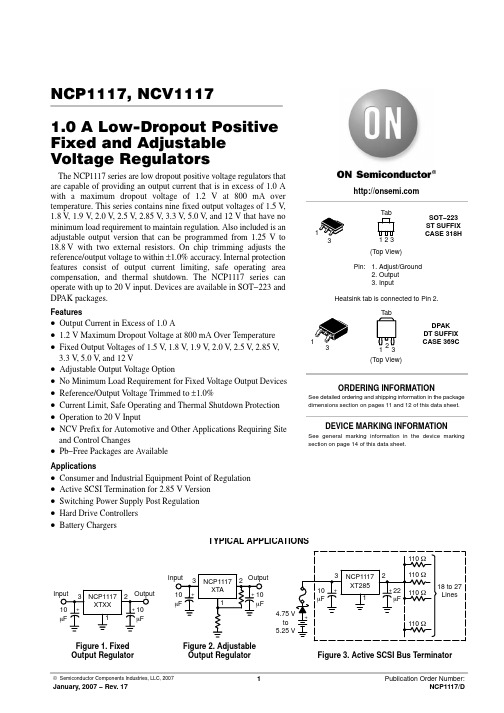
NCP1117, NCV11171.0 A Low−Dropout Positive Fixed and Adjustable Voltage RegulatorsThe NCP1117 series are low dropout positive voltage regulators that are capable of providing an output current that is in excess of 1.0 A with a maximum dropout voltage of 1.2 V at 800 mA over temperature. This series contains nine fixed output voltages of 1.5 V, 1.8 V, 1.9 V, 2.0 V, 2.5 V, 2.85 V, 3.3 V, 5.0 V, and 12 V that have no minimum load requirement to maintain regulation. Also included is an adjustable output version that can be programmed from 1.25 V to 18.8 V with two external resistors. On chip trimming adjusts the reference/output voltage to within ±1.0% accuracy. Internal protection features consist of output current limiting, safe operating area compensation, and thermal shutdown. The NCP1117 series can operate with up to 20 V input. Devices are available in SOT−223 and DPAK packages.Features•Output Current in Excess of 1.0 A•1.2 V Maximum Dropout V oltage at 800 mA Over Temperature •Fixed Output V oltages of 1.5 V, 1.8 V, 1.9 V, 2.0 V, 2.5 V, 2.85 V, 3.3 V, 5.0 V, and 12 V•Adjustable Output V oltage Option•No Minimum Load Requirement for Fixed V oltage Output Devices •Reference/Output V oltage Trimmed to ±1.0%•Current Limit, Safe Operating and Thermal Shutdown Protection •Operation to 20 V Input•NCV Prefix for Automotive and Other Applications Requiring Site and Control Changes•Pb−Free Packages are AvailableApplications•Consumer and Industrial Equipment Point of Regulation •Active SCSI Termination for 2.85 V Version •Switching Power Supply Post Regulation•Hard Drive Controllers•Battery ChargersFigure 1. Fixed Output RegulatorFigure 2. AdjustableOutput RegulatortoFigure 3. Active SCSI Bus Terminator TYPICAL APPLICATIONSSee detailed ordering and shipping information in the packagedimensions section on pages 11 and 12 of this data sheet.ORDERING INFORMATIONSee general marking information in the device markingsection on page 14 of this data sheet.DEVICE MARKING INFORMATIONMAXIMUM RATINGSRating Symbol Value Unit Input Voltage (Note 1)V in20VOutput Short Circuit Duration (Notes 2 and 3)−Infinite−Power Dissipation and Thermal CharacteristicsCase 318H (SOT−223)Power Dissipation (Note 2)Thermal Resistance, Junction−to−Ambient, Minimum Size Pad Thermal Resistance, Junction−to−CaseCase 369A (DPAK)Power Dissipation (Note 2)Thermal Resistance, Junction−to−Ambient, Minimum Size Pad Thermal Resistance, Junction−to−CaseP DR q JAR q JCP DR q JAR q JCInternally Limited16015Internally Limited676.0W°C/W°C/WW°C/W°C/WMaximum Die Junction Temperature Range T J−55 to 150°C Storage Temperature Range T stg−65 to 150°COperating Ambient Temperature Range NCP1117NCV1117T A0 to +125−40 to +125°CStresses exceeding Maximum Ratings may damage the device. Maximum Ratings are stress ratings only. Functional operation above the Recommended Operating Conditions is not implied. Extended exposure to stresses above the Recommended Operating Conditions may affect device reliability.1.This device series contains ESD protection and exceeds the following tests:Human Body Model 2000 V per MIL−STD−883, Method 3015.Machine Model Method 200 V.2.Internal thermal shutdown protection limits the die temperature to approximately 175°C. Proper heatsinking is required to prevent activation.The maximum package power dissipation is:P D+T J(max)*T AR q JA3.The regulator output current must not exceed 1.0 A with V in greater than 12 V.ELECTRICAL CHARACTERISTICS (C in = 10 m F, C out = 10 m F, for typical value T A = 25°C, for min and max values T A is the operating ambient temperature range that applies unless otherwise noted. (Note 4)Characteristic Symbol Min Typ Max UnitReference Voltage, Adjustable Output Devices(V in–V out = 2.0 V, I out = 10 mA, T A = 25°C)(V in–V out = 1.4 V to 10 V, I out = 10 mA to 800 mA) (Note 4)V ref1.2381.2251.25−1.2621.270VOutput Voltage, Fixed Output Devices1.5 V(V in = 3.5 V, I out = 10 mA, T A = 25 °C)(V in = 2.9 V to 11.5 V, I out = 0 mA to 800 mA) (Note 4)1.8 V(V in = 3.8 V, I out = 10 mA, T A = 25 °C)(V in = 3.2 V to 11.8 V, I out = 0 mA to 800 mA) (Note 4)1.9 V(V in = 3.9 V, I out = 10 mA, T A = 25 °C)(V in = 3.3 V to 11.9 V, I out = 0 mA to 800 mA) (Note 4)2.0 V(V in = 4.0 V, I out = 10 mA, T A = 25 °C)(V in = 3.4 V to 12 V, I out = 0 mA to 800 mA) (Note 4)2.5 V(V in = 4.5 V, I out = 10 mA, T A = 25 °C)(V in = 3.9 V to 10 V, I out = 0 mA to 800 mA,) (Note 4)2.85 V(V in = 4.85 V, I out = 10 mA, T A = 25 °C)(V in = 4.25 V to 10 V, I out = 0 mA to 800 mA) (Note 4)(V in = 4.0 V, I out = 0 mA to 500 mA) (Note 5)3.3 V(V in = 5.3 V, I out = 10 mA, T A = 25 °C)(V in = 4.75 V to 10 V, I out = 0 mA to 800 mA) (Note 4)5.0 V(V in = 7.0 V, I out = 10 mA, T A = 25 °C)(V in = 6.5 V to 12 V, I out = 0 mA to 800 mA) (Note 4)12 V(V in = 14 V, I out = 10 mA, T A = 25 °C)(V in = 13.5 V to 20 V, I out = 0 mA to 800 mA) (Note 4)V out1.4851.4701.7821.7551.8721.8621.9701.9602.4752.4502.8212.7902.7903.2673.2354.9504.90011.88011.7601.500−1.800−1.9001.9002.000−2.500−2.850−−3.300−5.000−12.000−1.5151.5301.8181.8451.9291.9382.0302.0402.5252.5502.8792.9102.9103.3333.3655.0505.10012.12012.240VLine Regulation (Note 5)Adjustable (V in = 2.75 V to 16.25 V, I out = 10 mA)Reg line−0.040.1%1.5 V (V in =2.9 V to 11.5 V, I out = 0 mA) 1.8 V (V in =3.2 V to 11.8 V, I out = 0 mA)1.9 V (V in = 3.3 V to 11.9 V, I out = 0 mA)2.0 V (V in =3.4 V to 12 V, I out = 0 mA) 2.5 V (V in = 3.9 V to 10 V, I out = 0 mA)2.85 V (V in = 4.25 V to 10 V, I out = 0 mA)3.3 V (V in =4.75 V to 15 V, I out = 0 mA)5.0 V (V in =6.5 V to 15 V, I out = 0 mA) 12 V(V in = 13.5 V to 20 V, I out = 0 mA)−−−−−−−−−0.30.40.50.50.50.80.80.91.01.01.02.52.52.53.04.56.07.5mVLoad Regulation (Note 5)Adjustable (I out = 10 mA to 800 mA, V in = 4.25 V)Reg line−0.20.4%1.5 V (I out = 0 mA to 800 mA, V in =2.9 V) 1.8 V (I out = 0 mA to 800 mA, V in =3.2 V)1.9 V (I out = 0 mA to 800 mA, V in = 3.3 V)2.0 V (I out = 0 mA to 800 mA, V in =3.4 V) 2.5 V (I out = 0 mA to 800 mA, V in = 3.9 V)2.85 V (I out = 0 mA to 800 mA, V in = 4.25 V)3.3 V (I out = 0 mA to 800 mA, V in =4.75 V)5.0 V (I out = 0 mA to 800 mA, V in =6.5 V) 12 V(I out = 0 mA to 800 mA, V in = 13.5 V)−−−−−−−−−2.32.62.73.03.33.84.36.7165.56.06.06.07.58.0101528mV4.The regulator output current must not exceed 1.0 A with V in greater than 12 V.5.Low duty cycle pulse techniques are used during testing to maintain the junction temperature as close to ambient as possible.ELECTRICAL CHARACTERISTICS (C in = 10 m F, C out = 10 m F, for typical value T A = 25°C, for min and max values T A is the operating ambient temperature range that applies unless otherwise noted. (Note 6)Characteristic Symbol Min Typ Max UnitDropout Voltage (Measured at V out− 100 mV)(I out = 100 mA)(I out = 500 mA)(I out = 800 mA)V in−V out−−−0.951.011.071.101.151.20VOutput Current Limit (V in−V out = 5.0 V, T A = 25°C, Note 6)I out100015002200mA Minimum Required Load Current for Regulation, Adjustable Output Devices(V in = 15 V)I L(min)−0.8 5.0mAQuiescent Current1.5 V(V in = 11.5 V)1.8 V(V in = 11.8 V)1.9 V(V in = 11.9 V)2.0 V(V in = 12 V)2.5 V(V in = 10 V)2.85 V(V in = 10 V)3.3 V(V in = 15 V)5.0 V(V in = 15 V)12 V(V in = 20 V)I Q−−−−−−−−−3.64.24.34.55.25.56.06.06.0101010101010101010mAThermal Regulation (T A = 25°C, 30 ms Pulse)−0.010.1%/WRipple Rejection (V in−V out = 6.4 V, I out = 500 mA, 10 V pp 120 Hz Sinewave) Adjustable1.5 V1.8 V1.9 V2.0 V2.5 V2.85 V3.3 V5.0 V12 V RR6766666664626260575073727072706868646154−−−−−−−−−−dBAdjustment Pin Current (V in = 11.25 V, I out = 800 mA)I adj−52120m AAdjust Pin Current Change(V in−V out = 1.4 V to 10 V, I out = 10 mA to 800 mA)D I adj−0.4 5.0m A Temperature Stability S T−0.5−% Long Term Stability (T A = 25°C, 1000 Hrs End Point Measurement)S t−0.3−% RMS Output Noise (f = 10 Hz to 10 kHz)N−0.003−%V out6.NCP1117: T low = 0°C ,T high = 125°CNCV1117: T low = −40°C,T high = 125°CT A , AMBIENT TEMPERATURE (°C)I a d j , A D J U S T P I N C U R R E N T (m A )020406080100Figure 8. Adjust Pin Currentvs. Temperature Figure 9. Quiescent Current Changevs. Temperature2.0I o u t , O U T P U T C U R R E N T (A )V o u t , O U T P U T V O L T A G E C H A N G E (%)−50−250255075100125150T A , AMBIENT TEMPERATURE (°C)−50−25255075100125150t, TIME (m s)−2007.56.54080120160O U T P U T V O L T A G E D E V I A T I O N (m V )I N P U T V O L T A G E (V )20020020406080100101001.0 k10 k100 k204060801002004006008001000I out , OUTPUT CURRENT (mA)R R , R I P P L E R E J E C T I O N (d B )f ripple , RIPPLE FREQUENCY (Hz)R R , R I P P L E R E J E C T I O N(d B )Figure 10. NCP1117XTA Ripple Rejectionvs. Output CurrentFigure 11. NCP1117XTA Ripple Rejectionvs. FrequencyFigure 12. NCP1117XT285Line Transient ResponseFigure 13. NCP1117XT285Load Transient ResponseFigure 14. NCP1117XT50Line Transient Response Figure 15. NCP1117XT50Load Transient ResponseC in = 10 m F C out = 10 m F V in = 6.5 VPreload = 0.1 A T A = 25°Ct, TIME (m s)00.500.1−0.14080120160L O A D C U R R E N T C H A N G E (A )O U T P U T V O L T A G E D E V I A T I O N (V )200C in = 10 m F C out = 10 m F V in = 4.5 VPreload = 0.1 A T A = 25°Ct, TIME (m s)00.500.1−0.14080120160L O A D C U R R E N T C H A N G E (A )O U T P U T V O L T A G E D E V I A T I O N (V )200t, TIME (m s)−2005.254.254080120160O U T P U T V O L T A G E D E V I A T I O N (m V )I N P U T V O L T A G E (V )200C in = 1.0 m F C out = 10 m F I out = 0.1 A T A = 25°C20C in = 1.0 m F C out = 10 m F I out = 0.1 A T A = 25°CFigure 16. NCP1117XT12 LineTransient ResponseFigure 17. NCP1117XT12 LoadTransient Responset, TIME (m s)C in = 10 m F C out = 10 m F V in = 13.5 V Preload = 0.1 A T A = 25°C00.500.1−0.14080120160200L O A D C U R R E N T C H A N G E (A )O U T P U T V O L T A G E D E V I A T I O N (V )60801001201401601800.40.60.81.01.21.41.6010203025155.0L, LENGTH OF COPPER (mm)405060708090100010203025155.0L, LENGTH OF COPPER (mm)0.60.81.01.21.41.6Figure 18. SOT−223 Thermal Resistance and MaximumPower Dissipation vs. P .C.B. Copper LengthR q J A , T H E R M A L R E S I S T A N C E ,J U N C T I O N −T O −A I R (°C W )P D , M A X I M U M P O W E R D I S S I P A T I O N (W )R q J A , T H E R M A L R E S I S T A N C E ,J U N C T I O N −T O −A I R (°C W )0.4Figure 19. DPAK Thermal Resistance and MaximumPower Dissipation vs. P .C.B. Copper Lengtht, TIME (m s)−20014.513.54080120160O U T P U T V O L T A G E D E V I A T I O N (m V )I N P U T V O L T A G E (V )20020C in = 1.0 m F C out = 10 m F I out = 0.1 A T A = 25°CP D , M A X I M U M P O W E R D I S S I P A T I O N (W )APPLICATIONS INFORMATIONIntroductionThe NCP1117 features a significant reduction in dropout voltage along with enhanced output voltage accuracy and temperature stability when compared to older industry standard three−terminal adjustable regulators. These devices contain output current limiting, safe operating area compensation and thermal shutdown protection making them designer friendly for powering numerous consumer and industrial products. The NCP1117 series is pin compatible with the older LM317 and its derivative device types.Output VoltageThe typical application circuits for the fixed and adjustable output regulators are shown in Figures 20 and 21.The adjustable devices are floating voltage regulators. They develop and maintain the nominal 1.25 V reference voltage between the output and adjust pins. The reference voltage is programmed to a constant current source by resistor R1, and this current flows through R2 to ground to set the output voltage. The programmed current level is usually selected to be greater than the specified 5.0 mA minimum that is required for regulation. Since the adjust pin current, I adj , is significantly lower and constant with respect to the programmed load current, it generates a small output voltage error that can usually be ignored. For the fixed output devices R1 and R2 are included within the device and the ground current I gnd , ranges from 3.0 mA to 5.0 mA depending upon the output voltage.External CapacitorsInput bypass capacitor C in may be required for regulator stability if the device is located more than a few inches from the power source. This capacitor will reduce the circuit’s sensitivity when powered from a complex source impedance and significantly enhance the output transient response. The input bypass capacitor should be mounted with the shortest possible track length directly across the regulator’s input and ground terminals. A 10 m F ceramic or tantalum capacitor should be adequate for most applications.Figure 20. Fixed Output RegulatorFrequency compensation for the regulator is provided by capacitor C out and its use is mandatory to ensure output stability. A minimum capacitance value of 4.7 m F with an equivalent series resistance (ESR) that is within the limits of 0.25 W to 2.2 W is required. The capacitor type can be ceramic, tantalum, or aluminum electrolytic as long as it meets the minimum capacitance value and ESR limits over the circuit’s entire operating temperature range. Higher values of output capacitance can be used to enhance loop stability and transient response with the additional benefit of reducing output noise.Figure 21. Adjustable Output RegulatorV out +V ref ǒ1)R2R1Ǔ)I adj R2The output ripple will increase linearly for fixed and adjustable devices as the ratio of output voltage to the reference voltage increases. For example, with a 12 V regulator, the output ripple will increase by 12 V/1.25 V or 9.6 and the ripple rejection will decrease by 20 log of this ratio or 19.6 dB. The loss of ripple rejection can be restored to the values shown with the addition of bypass capacitor C adj , shown in Figure 21. The reactance of C adj at the ripple frequency must be less than the resistance of R1. The value of R1 can be selected to provide the minimum required load current to maintain regulation and is usually in the range of 100 W to 200 W .C adj u12p f ripple R1The minimum required capacitance can be calculated from the above formula. When using the device in an application that is powered from the AC line via a transformer and a full wave bridge, the value for C adj is:f ripple +120Hz,R1+120W ,then C adj u 11.1m FThe value for C adj is significantly reduced in applications where the input ripple frequency is high. If used as a post regulator in a switching converter under the following conditions:f ripple +50kHz,R1+120W ,then C adj u 0.027m FFigures 10 and 11 shows the level of ripple rejection that is obtainable with the adjust pin properly bypassed.Protection DiodesThe NCP1117 family has two internal low impedance diode paths that normally do not require protection when used in the typical regulator applications. The first path connects between V out and V in , and it can withstand a peak surge current of about 15 A. Normal cycling of V in cannot generate a current surge of this magnitude. Only when V in is shorted or crowbarred to ground and C out is greater than 50 m F, it becomes possible for device damage to occur.Under these conditions, diode D1 is required to protect the device. The second path connects between C adj and V out , and it can withstand a peak surge current of about 150 mA.Protection diode D2 is required if the output is shorted or crowbarred to ground and C adj is greater than 1.0 m F.Figure 22. Protection Diode PlacementD1A combination of protection diodes D1 and D2 may be required in the event that V in is shorted to ground and C adj is greater than 50 m F. The peak current capability stated for the internal diodes are for a time of 100 m s with a junction temperature of 25°C. These values may vary and are to be used as a general guide.Load RegulationThe NCP1117 series is capable of providing excellent load regulation; but since these are three terminal devices,only partial remote load sensing is possible. There are two conditions that must be met to achieve the maximum available load regulation performance. The first is that the top side of programming resistor R1 should be connected as close to the regulator case as practicable. This will minimize the voltage drop caused by wiring resistance RW + from appearing in series with reference voltage that is across R1.The second condition is that the ground end of R2 should be connected directly to the load. This allows true Kelvin sensing where the regulator compensates for the voltage drop caused by wiring resistance RW −.Figure 23. Load SensingRemote LoadThermal ConsiderationsThis series contains an internal thermal limiting circuit that is designed to protect the regulator in the event that the maximum junction temperature is exceeded. When activated, typically at 175°C, the regulator output switches off and then back on as the die cools. As a result, if the device is continuously operated in an overheated condition, the output will appear to be oscillating. This feature provides protection from a catastrophic device failure due to accidental overheating. It is not intended to be used as a substitute for proper heatsinking. The maximum device power dissipation can be calculated by:P D +T J(max)*T AR q JAThe devices are available in surface mount SOT−223 and DPAK packages. Each package has an exposed metal tab that is specifically designed to reduce the junction to air thermal resistance, R q JA , by utilizing the printed circuit board copper as a heat dissipater. Figures 18 and 19 show typical R q JA values that can be obtained from a square pattern using economical single sided 2.0 ounce copper board material. The final product thermal limits should be tested and quantified in order to insure acceptable performance and reliability. The actual R q JA can vary considerably from the graphs shown. This will be due to any changes made in the copper aspect ratio of the final layout,adjacent heat sources, and air flow.Figure 24. Constant Current Regulator Figure 25. Slow Turn−On RegulatorFigure 28. Battery Backed−Up Power SupplyFigure 29. Adjusting Output of FixedVoltage RegulatorsThe 50 W resistor that is in series with the ground pin of the upper regulator level shifts its output 300 mV higher than the lower regulator. This keeps the lower regulator off until the input source is removed.Constant CurrentI out +Vref R)I adjORDERING INFORMATIONDeviceNominal Output VoltagePackage Shipping †NCP1117DTA AdjustableDPAK 75 Units / Rail NCP1117DTAG DPAK (Pb−Free)NCP1117DTARK DPAK 2500 / Tape & ReelNCP1117DTARKG DPAK (Pb−Free)NCP1117DTAT5DPAK NCP1117DTAT5G DPAK (Pb−Free)NCP1117STAT3SOT−2234000 / Tape & Reel NCP1117STAT3G SOT−223(Pb−Free)NCP1117DT1212DPAK 75 Units / Rail NCP1117DT12G DPAK (Pb−Free)NCP1117DT12RK DPAK 2500 / Tape & Reel NCP1117DT12RKG DPAK (Pb−Free)NCP1117ST12T3SOT−2234000 / Tape & Reel NCP1117ST12T3G SOT−223(Pb−Free)NCP1117DT15 1.5DPAK 75 Units / Rail NCP1117DT15G DPAK (Pb−Free)NCP1117DT15RK DPAK 2500 / Tape & Reel NCP1117DT15RKG DPAK (Pb−Free)NCP1117ST15T3SOT−2234000 / Tape & Reel NCP1117ST15T3G SOT−223(Pb−Free)NCP1117DT18 1.8DPAK 75 Units / Rail NCP1117DT18G DPAK (Pb−Free)NCP1117DT18RK DPAK 2500 / Tape & ReelNCP1117DT18RKG DPAK (Pb−Free)NCP1117DT18T5DPAK NCP1117DT18T5G DPAK (Pb−Free)NCP1117ST18T3SOT−2234000 / Tape & Reel NCP1117ST18T3G SOT−223(Pb−Free)NCP1117DT19RKG1.9DPAK (Pb−Free)2500 / Tape & Reel †For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging Specifications Brochure, BRD8011/D.*NCV prefix is for automotive and other applications requiring site and control changes.ORDERING INFORMATIONDeviceShipping †Package Nominal Output VoltageNCP1117DT20 2.0DPAK 75 Units / Rail NCP1117DT20G DPAK (Pb−Free)NCP1117DT20RK DPAK 2500 / Tape & Reel NCP1117DT20RKG DPAK (Pb−Free)NCP1117ST20T3SOT−2234000 / Tape & Reel NCP1117ST20T3G SOT−223(Pb−Free)NCP1117DT25 2.5DPAK 75 Units / Rail NCP1117DT25G DPAK (Pb−Free)NCP1117DT25RK DPAK 2500 / Tape & ReelNCP1117DT25RKG DPAK (Pb−Free)NCP1117DT25T5DPAK NCP1117DT25T5G DPAK (Pb−Free)NCP1117ST25T3SOT−2234000 / Tape & Reel NCP1117ST25T3G SOT−223(Pb−Free)NCP1117DT285 2.85DPAK 75 Units / Rail NCP1117DT285G DPAK (Pb−Free)NCP1117DT285RK DPAK 2500 / Tape & Reel NCP1117DT285RKG DPAK (Pb−Free)NCP1117ST285T3SOT−2234000 / Tape & Reel NCP1117ST285T3G SOT−223(Pb−Free)NCP1117DT33 3.3DPAK 75 Units / Rail NCP1117DT33G DPAK (Pb−Free)NCP1117DT33RK DPAK 2500 / Tape & ReelNCP1117DT33RKG DPAK (Pb−Free)NCP1117DT33T5DPAK NCP1117DT33T5G DPAK (Pb−Free)NCP1117ST33T3SOT−2234000 / Tape & Reel NCP1117ST33T3G SOT−223(Pb−Free)NCP1117DT50 5.0DPAK 75 Units / Rail NCP1117DT50G DPAK (Pb−Free)NCP1117DT50RK DPAK 2500 / Tape & Reel NCP1117DT50RKG DPAK (Pb−Free)NCP1117ST50T3SOT−2234000 / Tape & Reel NCP1117ST50T3GSOT−223(Pb−Free)†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging Specifications Brochure, BRD8011/D.*NCV prefix is for automotive and other applications requiring site and control changes.ORDERING INFORMATIONDeviceShipping †Package Nominal Output VoltageNCV1117DTARK*AdjustableDPAK 2500 / Tape & ReelNCV1117DTARKG*DPAK (Pb−Free)NCV1117STAT3*SOT−2234000 / Tape & ReelNCV1117STAT3G*SOT−223(Pb−Free)NCV1117ST12T3*12SOT−223NCV1117ST12T3G*SOT−223(Pb−Free)NCV1117DT15RK* 1.5DPAK 2500 / Tape & Reel NCV1117DT15RKG*DPAK (Pb−Free)NCV1117ST15T3*SOT−2234000 / Tape & Reel NCV1117ST15T3G*SOT−223(Pb−Free)NCV1117DT18RKG* 1.8DPAK (Pb−Free)2500 / Tape & Reel NCV1117DT18T5*DPAK NCV1117DT18T5G*DPAK (Pb−Free)NCV1117DT20RK* 2.0DPAK NCV1117DT20RKG*DPAK (Pb−Free)NCV1117ST20T3*SOT−2234000 / Tape & Reel NCV1117ST20T3G*SOT−223(Pb−Free)NCV1117DT25RK* 2.5DPAK 2500 / Tape & Reel NCV1117DT25RKG*DPAK (Pb−Free)NCV1117ST25T3*SOT−2234000 / Tape & Reel NCV1117ST25T3G*SOT−223(Pb−Free)NCV1117DT33T5* 3.3DPAK 2500 / Tape & Reel NCV1117DT33T5G*DPAK (Pb−Free)NCV1117ST33T3* 3.3SOT−2234000 / Tape & Reel NCV1117ST33T3G*SOT−223(Pb−Free)NCV1117DT50RK* 5.0DPAK 2500 / Tape & Reel NCV1117DT50RKG*DPAK (Pb−Free)†For information on tape and reel specifications, including part orientation and tape sizes, please refer to our Tape and Reel Packaging Specifications Brochure, BRD8011/D.*NCV prefix is for automotive and other applications requiring site and control changes.117AJG ALYWW17−15G ALYWW17−18G ALYWW117−2G ALYWW17−25G ALYWW17285G ALYWW17−33G ALYWW117−5G ALYWW17−12G ALYWWAYW 117−A GG 1SOT−223ST SUFFIX CASE 318HA = Assembly Location L = Wafer Lot Y = YearWW, W = Work WeekG or G = Pb−Free PackageMARKING DIAGRAMS − NCP PREFIXDPAK DT SUFFIX CASE 369C23123123123123123123123123123Adjustable1.5 V1.8 V2.0 V2.5 V2.85 V3.3 V5.0 V12 VAdjustable1.5 V1.8 V2.0 V2.5 V2.85 V3.3 V5.0 V12 V(Note: Microdot may be in either location)AYW 17−15GG123AYW 17−18GG123AYW 117−2G G123AYW 17−25GG123AYW 7−285GG 123AYW 17−33GG123AYW 117−5G G123AYW 17−12GG1231.9 VAYW 17−19GG12317−19G ALYWW1231.9 V17AJVG ALYWW1715VG ALYWW1718VG ALYWW1172VG ALYWW1725VG ALYWW1733VG ALYWW1175VG ALYWWAYW 117AV GG 1SOT−223ST SUFFIX CASE 318HA = Assembly Location L = Wafer Lot Y = YearWW, W = Work WeekG or G = Pb−Free PackageMARKING DIAGRAMS − NCV PREFIXDPAK DT SUFFIX CASE 369C23123123123123123123123Adjustable1.5 V2.0 V2.5 V3.3 V12 VAdjustable1.5 V1.8 V2.0 V2.5 V3.3 V5.0 V(Note: Microdot may be in either location)AYW 1715V GG123AYW 1172V GG123AYW 1725V GG 123AYW 1733V GG123AYW 1712V GG123PACKAGE DIMENSIONSSOT−223ST SUFFIX CASE 318H−01ISSUE ONOTES:1.DIMENSIONS ARE IN MILLIMETERS.2.INTERPRET DIMENSIONS AND TOLERANCES PER ASME Y14.5M, 1994.3.DIMENSION E1 DOES NOT INCLUDE INTERLEAD FLASH OR PROTRUSION. INTERLEAD FLASH OR PROTRUSION SHALL NOT EXCEED 0.23 PER SIDE.4.DIMENSIONS b AND b2 DO NOT INCLUDEDAMBAR PROTRUSION. ALLOWABLE DAMBAR PROTRUSION SHALL BE 0.08 TOTAL IN EXCESS OF THE b AND b2 DIMENSIONS AT MAXIMUM MATERIAL CONDITION.5.TERMINAL NUMBERS ARE SHOWN FOR REFERENCE ONLY.6.DIMENSIONS D AND E1 ARE TO BE DETERMINED AT DATUM PLANE H.DIM MIN MAX MILLIMETERS A −−− 1.80A10.020.11b 0.600.88b10.600.80b2 2.90 3.10b3 2.90 3.05c 0.240.35c10.240.30D 6.30 6.70E 6.707.30E1 3.30 3.70e2.30e1 4.60L0.25−−−T10 __*For additional information on our Pb−Free strategy and solderingdetails, please download the ON Semiconductor Soldering and Mounting Techniques Reference Manual, SOLDERRM/D.SOLDERING FOOTPRINT*PACKAGE DIMENSIONSDPAK DT SUFFIX CASE 369C−01ISSUE Oǒmm inchesǓSCALE 3:1*For additional information on our Pb−Free strategy and solderingdetails, please download the ON Semiconductor Soldering and Mounting Techniques Reference Manual, SOLDERRM/D.SOLDERING FOOTPRINT*VSDIMMIN MAX MIN MAX MILLIMETERSINCHES A 0.2350.245 5.97 6.22B 0.2500.265 6.35 6.73C 0.0860.094 2.19 2.38D 0.0270.0350.690.88E 0.0180.0230.460.58F 0.0370.0450.94 1.14G 0.180 BSC 4.58 BSC H 0.0340.0400.87 1.01J 0.0180.0230.460.58K 0.1020.114 2.60 2.89L 0.090 BSC 2.29 BSC R 0.1800.215 4.57 5.45S 0.0250.0400.63 1.01U 0.020−−−0.51−−−V 0.0350.0500.89 1.27Z0.155−−−3.93−−−NOTES:1.DIMENSIONING AND TOLERANCING PER ANSI Y14.5M, 1982.2.CONTROLLING DIMENSION: INCH.ON Semiconductor and are registered trademarks of Semiconductor Components Industries, LLC (SCILLC). SCILLC reserves the right to make changes without further notice to any products herein. SCILLC makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does SCILLC assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation special, consequential or incidental damages.“Typical” parameters which may be provided in SCILLC data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. SCILLC does not convey any license under its patent rights nor the rights of others. SCILLC products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the SCILLC product could create a situation where personal injury or death may occur. Should Buyer purchase or use SCILLC products for any such unintended or unauthorized application, Buyer shall indemnify and hold SCILLC and its officers, employees, subsidiaries, affiliates,and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that SCILLC was negligent regarding the design or manufacture of the part. SCILLC is an Equal Opportunity/Affirmative Action Employer. This literature is subject to all applicable copyright laws and is not for resale in any manner.PUBLICATION ORDERING INFORMATION。
NC7WZ07P6X_NL中文资料

© 2005 Fairchild Semiconductor Corporation DS500218March 1999Revised February 2005NC7WZ07 TinyLogic £ UHS Dual Buffer (Open Drain Outputs)NC7WZ07TinyLogic £ UHS Dual Buffer (Open Drain Outputs)General DescriptionThe NC7WZ07 is a dual buffer with open drain outputs from Fairchild's Ultra High Speed Series of TinyLogic £ in the space saving SC70 6-lead package. The device is fab-ricated with advanced CMOS technology to achieve ultra high speed with high output drive while maintaining low static power dissipation over a very broad V CC operating range. The device is specified to operate over the 1.65V to 5.5V V CC range. The inputs and outputs are high imped-ance when V CC is 0V. Inputs tolerate voltages up to 7V independent of V CC operating voltage.Featuress Space saving SC70 6-lead packages Ultra small MicroPak ¥ Pb-Free leadless package s Ultra High Speed: t PZL 2.3 ns Typ into 50 pF at 5V V CC s High I OL Output Drive: 24 mA at 3V V CC s Broad V CC Operating Range: 1.65V to 5.5V s Matches the performance of LCX when operated at 3.3V V CC s Power down high impedance inputs/outputss Overvoltage tolerant inputs facilitate 5V to 3V translation s Patented noise/EMI reduction circuitry implementedOrdering Code:Pb-Free package per JEDEC J-STD-020B.Note 1: “_NL” indicates Pb-Free product (per JEDEC J-STD-020B). Device is available in Tape and Reel only.TinyLogic £ is a registered trademark of Fairchild Semiconductor Corporation.MicroPak ¥ is a trademark of Fairchild Semiconductor Corporation.Order Package Product Code Package DescriptionSupplied AsNumber Number Top Mark NC7WZ07P6X MAA06A Z076-Lead SC70, EIAJ SC88, 1.25mm Wide3k Units on Tape and ReelNC7WZ07P6X_NL (Note 1)MAA06A Z07Pb-Free 6-Lead SC70, EIAJ SC88, 1.25mm Wide3k Units on Tape and ReelNC7WZ07L6XMAC06AD3Pb-Free 6-Lead MicroPak, 1.0mm Wide5k Units on Tape and Reel 2N C 7W Z 07Logic SymbolIEEE/IECPin DescriptionsFunction TableY AH HIGH Logic Level L LOW Logic LevelConnection DiagramsPin Assignments for SC70(Top View)Pin One Orientation DiagramAAA represents Product Code Top Mark - see ordering codeNote: Orientation of Top Mark determines Pin One location. Read the top product code mark left to right, Pin One is the lower left pin (see diagram).Pad Assignments for MicroPak(Top Thru View)Pin Names Description A 1, A 2Data Inputs Y 1, Y 2OutputInput Output A Y L L HZNC7WZ07Absolute Maximum Ratings (Note 2)Recommended Operating Conditions (Note 3)Note 2: Absolute maximum ratings are DC values beyond which the device may be damaged or have its useful life impaired. The datasheet specifica-tions should be met, without exception, to ensure that the system design is reliable over its power supply, temperature, and output/input loading vari-ables. Fairchild does not recommend operation outside datasheet specifi-cations.Note 3: Unused inputs must be held HIGH or LOW. They may not float.DC Electrical CharacteristicsSupply Voltage (V CC ) 0.5V to 7V DC Input Voltage (V IN ) 0.5V to 7V DC Output Voltage (V OUT ) 0.5V to 7VDC Input Diode Current (I IK )@ V IN 0.5V50 mA DC Output Diode Current (I OK )@ V OUT 0.5V 50 mA DC Output Current (I OUT ) 50 mA DC V CC /GND Current (I CC /I GND )r 100 mAStorage Temperature (T STG )65q C to 150q CJunction Temperature under Bias (T J )150q CJunction Lead Temperature (T L )(Soldering, 10 seconds)260q C Power Dissipation (P D ) @ 85q C180 mWSupply Voltage Operating (V CC ) 1.65V to 5.5V Supply Voltage Data Retention (V CC ) 1.5V to 5.5V Input Voltage (V IN )0V to 5.5V Output Voltage (V OUT )0V to 5.5VOperating Temperature (T A ) 40q C to 85q CInput Rise and Fall Time (t r , t f )V CC 1.8V, 2.5V r 0.2V 0 ns/V to 20 ns/V V CC 3.3V r 0.3V 0 ns/V to 10 ns/V V CC 5.0V r 0.5V 0 ns/V to 5 ns/VThermal Resistance (T JA )350q C/W Symbol ParameterV CC T A 25q CT A 40q C to 85q C Units Conditions(V)Min TypMaxMin MaxV IH HIGH Level Input Voltage 1.65 to 1.950.75 V CC0.75 V CC V 2.3 to 5.50.7 V CC0.7 V CCV IL LOW Level Input Voltage 1.65 to 1.950.25 V CC 0.25 V CC V 2.3 to 5.50.3 V CC0.3 V CC I LKG HIGH Level Output 1.65 to 5.5r 5r 10P AV IN V IHLeakage CurrentV OUT V CC or GNDV OLLOW Level Output Voltage1.650.00.10.0VV IN V ILI OL 100 P A1.80.00.10.12.30.00.10.13.00.00.10.14.50.00.10.11.650.080.240.24VI OL 4 mA 2.30.100.30.3I OL 8 mA 3.00.160.40.4I OL 16 mA 3.00.240.550.55I OL 24 mA 4.50.250.550.55I OL 32 mAI IN Input Leakage Current 0 to 5.5r 0.1r 1.0P A 0 d V IN d 5.5V I OFF Power Off Leakage Current 0.0110P A V IN or V OUT 5.5V I CCQuiescent Supply Current1.65 to 5.51.010P A V IN 5.5V, GND 4N C 7W Z 07AC Electrical CharacteristicsNote 4:C PD is defined as the value of the internal equivalent capacitance which is derived from dynamic operating current consumption (I CCD ) at no output loading and operating at 50% duty cycle. (See Figure 2.) C PD is related to I CCD dynamic operating current by the expression: I CCD (C PD )(V CC )(f IN ) (I CC static).AC Loading and WaveformsC L includes load and stray capacitance Input PRR 1.0 MHz; t W 500 nsFIGURE 1. AC Test CircuitInput AC Waveform; t r t f 1.8 ns;PRR 10 MHz; Duty Cycle 50%FIGURE 2. I CCD Test CircuitFIGURE 3. AC WaveformsSymbol ParameterV CC T A 25q CT A 40q C to 85q C UnitsConditionsFigure (V)Min Typ Max Min Max Numbert PZLPropagation Delay1.65 1.8 6.611.5 1.812.6nsFigures 1, 31.8 1.8 5.59.5 1.810.5C L 50 pF2.5 r 0.2 1.23.7 5.8 1.2 6.4RU 500:3.3 r 0.30.8 2.94.40.8 4.8RD 500:5.0 r 0.50.5 2.3 3.50.5 3.9V I 2 x V CCt PLZPropagation Delay1.65 1.8 5.511.5 1.812.6nsFigures 1, 31.8 1.8 4.39.5 1.810.5C L 50 pF2.5 r 0.2 1.2 2.8 5.8 1.2 6.4RU 500:3.3 r 0.30.8 2.14.40.8 4.8RD 500:5.0 r 0.50.51.4 3.50.53.9V I 2 x V CCC IN Input Capacitance 0 2.5pF C OUT Output Capacitance 0 4.0pF C PDPower Dissipation 3.33pF(Note 4)Figure 2Capacitance5.04NC7WZ07Tape and Reel SpecificationTAPE FORMAT for SC70TAPE DIMENSIONS inches (millimeters)PackageTape Number Cavity Cover Tape DesignatorSection Cavities Status Status Leader (Start End)125 (typ)Empty Sealed P6XCarrier 3000Filled Sealed Trailer (Hub End)75 (typ)EmptySealedPackage Tape Size DIM A DIM B DIM F DIM K o DIM P1DIM W SC70-68 mm0.0930.0960.138 r 0.0040.053 r 0.0040.1570.315 r 0.004(2.35)(2.45)(3.5 r 0.10)(1.35 r 0.10)(4)(8 r 0.1) 6N C 7W Z 07Tape and Reel Specification (Continued)TAPE FORMAT for MicroPakREEL DIMENSIONS inches (millimeters)PackageTape Number Cavity Cover Tape DesignatorSection Cavities Status Status Leader (Start End)125 (typ)Empty Sealed L6XCarrier 5000Filled Sealed Trailer (Hub End)75 (typ)EmptySealedTape Size A B C D N W1W2W38 mm7.00.0590.5120.795 2.1650.331 0.059/ 0.0000.567W1 0.078/ 0.039(177.8)(1.50)(13.00)(20.20)(55.00)(8.40 1.50/ 0.00)(14.40)(W1 2.00/ 1.00)NC7WZ07 Physical Dimensions inches (millimeters) unless otherwise noted6-Lead SC70, EIAJ SC88, 1.25mm WidePackage Number MAA06A8N C 7W Z 07 T i n y L o g i c £ U H S D u a l B u f f e r (O p e n D r a i n O u t p u t s )Physical Dimensions inches (millimeters) unless otherwise noted (Continued)Pb-Free 6-Lead MicroPak, 1.0mm WidePackage Number MAC06AFairchild does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and Fairchild reserves the right at any time without notice to change said circuitry and specifications.LIFE SUPPORT POLICYFAIRCHILD ’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR CORPORATION. As used herein:1.Life support devices or systems are devices or systems which, (a) are intended for surgical implant into the body, or (b) support or sustain life, and (c) whose failure to perform when properly used in accordance with instructions for use provided in the labeling, can be rea-sonably expected to result in a significant injury to the user. 2. A critical component in any component of a life support device or system whose failure to perform can be rea-sonably expected to cause the failure of the life support device or system, or to affect its safety or effectiveness.。
【研究】Inconel718(N07718)性能、特性、参数...
材料牌号:Inconel718镍基合金美国牌号:NO7718德国牌号:W.Nr.2.4668/NiCr19Fe19Nb5法国牌号:Nc19FeNb一、Inconel718(N07718)镍基合金概述:Inconel718合金是以体心四方的γ"和面心立方的γ′相沉淀强化的镍基高温合金,在-253~700℃温度范围内具有良好的综合性能,650℃以下的屈服强度居变形高温合金的首位,并具有良好的抗疲劳、抗辐射、抗氧化、耐腐蚀性能,以及良好的加工性能、焊接性能和长期组织稳定性,能够制造各种形状复杂的零部件,在宇航、核能、石油工业中,在上述温度范围内获得了极为广泛的应用。
该合金的另一特点是合金组织对热加工工艺特别敏感,掌握合金中相析出和溶解规律及组织与工艺、性能间的相互关系,可针对不同的使用要求制定合理、可行的工艺规程,就能获得可满足不同强度级别和使用要求的各种零件。
供应的品种有锻件、锻棒、轧棒、冷轧棒、圆饼、环件、板、带、丝、管等。
可制成盘、环、叶片、轴、紧固件和弹性元件、板材结构件、机匣等零部件在航空上长期使用。
1、Inconel718材料牌号:Inconel718。
2、Inconel718相近牌号:Inconel718(美国),NC19FeNb(法国)。
加工和热处理Inconel718合金在机械加工领域属难加工材料。
预热工件在加热之前和加热过程中都必须进行表面清理,保持表面清洁。
若加热环境含有硫、磷、铅或其他低熔点金属,Inconel718合金将变脆。
杂质来源于做标记的油漆、粉笔、润滑油、水、燃料等。
燃料的硫含量要低,如液化气和天然气的杂质含量要低于0.1%,城市煤气的硫含量要低于0.25g/m3,石油气的硫含量低于0.5%是理想的。
加热的电炉最好要具有较精确的控温能力,炉气必须为中性或弱碱性,应避免炉气成分在氧化性和还原性中波动。
热加工Inconel718合金合适的热加工温度为1120-900℃,冷却方式可以是水淬或其他快速冷却方式,热加工后应及时退火以保证得到最佳的性能。
CY7C1411AV18资料

Errata Revision: *CMay 02, 2007RAM9 QDR-I/DDR-I/QDR-II/DDR- II ErrataCY7C129*DV18/CY7C130*DV25CY7C130*BV18/CY7C130*BV25/CY7C132*BV25CY7C131*BV18 / CY7C132*BV18/CY7C139*BV18CY7C191*BV18/CY7C141*AV18 / CY7C142*AV18/CY7C151*V18 /CY7C152*V18This document describes the DOFF issue for QDRII/DDRII and the Output Buffer and JTAG issues for QDRI/DDRI/QDRII/DDRII. Details include trigger conditions, possible workarounds and silicon revision applicability.This document should be used to compare to the respective datasheet for the devices to fully describe the device functionality.Please contact your local Cypress Sales Representative for availability of the fixed devices and any other questions.Devices AffectedTable 1. List of Affected devicesProduct StatusAll of the above densities and revisions are available in sample as well as production quantities.QDR/DDR DOFF Pin, Output Buffer and JTAG Issues Errata SummaryThe following table defines the issues and the fix status for the different devices which are affected.Density & Revision Part Numbers Architecture 9Mb - Ram9(90 nm)CY7C130*DV25QDRI/DDRI 9Mb - Ram9(90 nm)CY7C129*DV18QDRII 18Mb - Ram9(90nm)CY7C130*BV18CY7C130*BV25CY7C132*BV25QDRI/DDRI18Mb - Ram9(90nm)CY7C131*BV18CY7C132*BV18CY7C139*BV18CY7C191*BV18QDRII/DDRII36Mb - Ram9(90nm)CY7C141*AV18CY7C142*AV18QDRII/DDRII 72Mb -Ram9(90nm)CY7C151*V18CY7C152*V18QDRII/DDRIIItemIssueDeviceFix Status1.DOFF pin is used for enabling/dis-abling the DLL circuitry within the SRAM. To enable the DLL circuitry, DOFF pin must be externally tied HIGH. The QDR-II/DDR-II devices have an internal pull down resistor of ~5K . The value of the external pull-up resistor should be 500 or less in order to ensure DLL is enabled.9Mb - “D” Rev - Ram918Mb - “B” Rev - Ram936Mb - “A” Rev - Ram972Mb - Ram9QDR-II/DDR-II DevicesThe fix involved removing the in-ternal pull-down resistor on the DOFF pin. The fix has been im-plemented on the new revision and is now available.ΩΩTable 2.Issue Definition and fix status for different devices1. DOFF Pin Issue•ISSUE DEFINITIONThis issue involves the DLL not turning ON properly if a large resistor is used (eg:-10K ) as an external pullup resistor to enable the DLL. If a 10K or higher pullup resistor is used externally, the voltage on DOFF is not high enough to enable the DLL.•PARAMETERS AFFECTEDThe functionality of the device will be affected because of the DLL is not turning ON properly. When the DLL is enabled, all AC and DC parameters on the datasheet are met. •TRIGGER CONDITION(S)Having a 10K or higher external pullup resistor for disabling the DOFF pin.•SCOPE OF IMPACTThis issue will alter the normal functionality of the QDRII/DDRII devices when the DLL is disabled.•EXPLANATION OF ISSUEFigure 1 shows the DOFF pin circuit with an internal 5K internal resistor. The fix planned is to disable the internal 5K leaker.•WORKAROUND2.O/P Buffer enters a locked up unde-fined state after controls or clocks are left floating. No proper read/write access can be done on the device until a dummy read is performed.9Mb - “D” Rev - Ram918Mb - “B” Rev - Ram936Mb - “A” Rev - Ram972Mb - Ram9QDR-I/DDR-I/QDR-II/DDR-II Devices The fix has been implemented onthe new revision and is now avail-able.3.The EXTEST function in the JTAG test fails when input K clock is floating in the JTAG mode.9Mb - “D” Rev - Ram918Mb - “B” Rev - Ram936Mb - “A” Rev - Ram972Mb - Ram9QDR-I/DDR-I/QDR-II/DDR-II DevicesThe fix involved bypassing the ZQ circuitry in JTAG mode. This was done by overriding the ZQ circuit-ry by the JTAG signal. The fix has been implemented on the new re-vision and is now available.Figure 1.DOFF pin with the 5K internal resistorItemIssueDeviceFix StatusΩΩΩΩΩΩThe workaround is to have a low value of external pullup resistor for the DOFF pin (recommended value is <500). When DOFF pins from multiple QDR devices are connected through the same pull-up resistors on the board, it is recommended that this DOFF pin be directly connected to Vdd due to the lower effective resistance since the "leakers" are in parallel.Figure 2 shows the proposed workaround and the fix planned.•FIXSTATUSFix involved removing the internal pull-down resistor on the DOFF pin. The fix has been implemented on the new revision and is now available. The new revision is an increment of the existing revision. The following table lists the devices affected, current revision and the new revision after the fix.Table 3.List of Affected Devices and the new revison2.Output Buffer IssueFigure 2.Proposed workaround with the 500 external pullupCurrent Revision New Revision after the FixCY7C129*DV18CY7C129*EV18CY7C131*BV18CY7C131*CV18CY7C132*BV18CY7C132*CV18CY7C139*BV18CY7C139*CV18CY7C191*BV18CY7C191*CV18CY7C141*AV18CY7C141*BV18CY7C142*AV18CY7C142*BV18CY7C151*V18CY7C151*AV18CY7C152*V18CY7C152*AV18ΩΩ•ISSUE DEFINITIONThis issue involves the output buffer entering an unidentified state when the input signals (only Control signals or Clocks) are floating during reset or initialization of the memory controller after power up. •PARAMETERS AFFECTEDNo timing parameters are affected. The device may drive the outputs even though the read operation is not enabled. A dummy read is performed to clear this condition.•TRIGGER CONDITION(S)Input signals(namely RPS# for QDR-I/QDRII , WE# and LD# for DDR-I/DDRII) or Clocks (K/K# and/or C/C#) are floating during reset or initialization of the memory controller after power up.•SCOPE OF IMPACTThis issue will jeopardize any number of writes or reads which take place after the controls or clock are left floating. This can occur anywhere in the SRAM access ( all the way from power up of the memory device to transitions taking place for read/write accesses to the memory device) if the above trigger conditions are met.•EXPLANATION OF ISSUEFigure 3 shows the output register Reset circuit with an SR Latch circled. This latch has two inputs with one of them coming from some logic affected by the clock and RPS#(QDR) or WE# and LD#(DDR).The issue happens when clocks are glitching/toggling with controls floating. This will cause the SR latch to be taken into an unidentified state. The SR Latch will need to be reset by a dummy read operation if this happens. Array•WORKAROUNDThis is viable only if the customer has the trigger conditions met during reset or initialization of the memory controller after power up. In order for the workaround to perform properly, Cypress recommends the insertion of a minimum of 16 “dummy” READ operations to every SRAM device on the board prior to writing any meaningful data into the SRAM. After this one “dummy” READ operation, the device will perform properly.“Dummy” READ is defined as a read operation to the device that is not meant to retrieve required data. The “dummy” READ can be to any address location in the SRAM. Refer to Figure 4 for the dummy read implemen-tation.In systems where multiple SRAMs with multiple RPS# lines are used, a dummy read operation will have to be performed on every SRAM on the board. Below is an example sequence of events that can be performed before valid access can be performed on the SRAM.1) Initialize the Memory Controller2) Assert RPS# Low for each of the memory devicesNote:For all devices with x9 bus configuration, the following sequence needs to be performed:1) For the 72M / 36M / 18M x9 devices drive address pin A2 / A10 / A3 low respectively and perform dummyread.2) For the 72M / 36M / 18M x9 devices drive address pin A2 / A10 / A3 high respectively and perform dummyread.If the customer has the trigger conditions met during normal access to the memory then there is no workaround at this point.•FIX STATUSThe fix has been implemented on the new revision and is now available. The new revision is an increment of the existing revision. Please refer to Table 4 for the list of devices affected, current revision and the new revision after the fix.3. JTAG Mode Issue•ISSUE DEFINITIONIf the input clock (K Clock) is left floating when the device is in JTAG mode, spurious high frequency noise on this input can be interpreted by the device as valid clocks. This could cause the impedance matching circuitry (ZQ) on the QDR/DDR devices to periodically load itself with incorrect values. These incorrect values in the ZQ register could force the outputs into a High-Impedance state. The ZQ circuitry requires at least 1000 valid K clock cycles to drive the outputs from high impedance to low impedance levels.•PARAMETERS AFFECTEDThis issue only affects the EXTEST command when the device is in the JTAG mode. The normal functionality of the device will not be affected.•TRIGGER CONDITION(S)EXTEST command executed immediately after power-up without providing any K clock cycles.•SCOPE OF IMPACTThis issue only impacts the EXTEST command when device is tested in the JTAG mode. Normal functionality of the device is not affected. •EXPLANATION OF ISSUEImpedance matching circuitry (ZQ) is present on the QDR/DDR devices to set the desired impedance on the outputs. This ZQ circuitry is updated every 1000 clock cycles of K clock to ensure that the impedance of the O/P is set to valid state. However, when the device is operated in the JTAG mode immediately after power-up, high frequency noise on the input K clock can be treated by the ZQ circuitry as valid clocks thereby setting the outputs in to a high-impedance mode. If a minimum of 1000 valid K clocks are applied before performing the JTAG test, this should clear the ZQ circuitry and ensure that the outputs are driven to valid impedance levels.•WORKAROUNDElimination of the issue: After power-up, before any valid operations are performed on the device, insert a minimum of 1000 valid clocks on K input.•FIX STATUSThe fix involved bypassing the ZQ circuitry in JTAG mode. This was done by overriding the ZQ circuitry by the JTAG signal. The fix has been implemented on the new revision and is now available. The new revision is an increment of the existing revision. Please refer to Table 4 for the list of devices affected, current revision and the new revision after the fix..Table 4.List of Affected devices and the new revisionCurrent Revision New Revision after the FixCY7C129*DV18CY7C129*EV18CY7C130*DV25CY7C130*EV25CY7C130*BV18CY7C130*CV18CY7C130*BV25CY7C130*CV25CY7C132*BV25CY7C132*CV25CY7C131*BV18CY7C131*CV18CY7C132*BV18CY7C132*CV18CY7C139*BV18CY7C139*CV18CY7C191*BV18CY7C191*CV18CY7C141*AV18CY7C141*BV18CY7C142*AV18CY7C142*BV18CY7C151*V18CY7C151*AV18CY7C152*V18CY7C152*AV18ReferencesAll 90nm QDRI/DDRI/QDRII/DDRII datasheets:-Table 5.List of Datasheet spec# for the Affected devicesSpec#Part#DensityArchitecture38-05628CY7C1304DV259-MBIT QDR(TM) SRAM 4-WORD BURST 38-05632CY7C1308DV259-MBIT DDR-I SRAM 4-WORD BURST 001-00350CY7C1292DV18/1294DV189-MBIT QDR- II(TM) SRAM 2-WORD BURST 38-05621CY7C1316BV18/1916BV18/1318BV18/1320BV1818-MBIT DDR-II SRAM 2-WORD BURST 38-05622CY7C1317BV18/1917BV18/1319BV18/1321BV1818-MBIT DDR-II SRAM 4-WORD BURST 38-05623CY7C1392BV18/1393BV18/1394BV1818-MBIT DDR-II SIO SRAM 2-WORD BURST 38-05631CY7C1323BV2518-MBIT DDR-I SRAM 4-WORD BURST 38-05630CY7C1305BV25/1307BV2518-MBIT QDR(TM) SRAM 4-WORD BURST 38-05627CY7C1303BV25/1306BV2518-MBIT QDR(TM) SRAM 2-WORD BURST 38-05629CY7C1305BV18/1307BV1818-MBIT QDR(TM) SRAM 4-WORD BURST 38-05626CY7C1303BV18/1306BV1818-MBIT QDR(TM) SRAM 2-WORD BURST 38-05619CY7C1310BV18/1910BV18/1312BV18/1314BV1818-MBIT QDR - II (TM) SRAM 2-WORD BURST 38-05620CY7C1311BV18/1911BV18/1313BV18/1315BV1818-MBIT QDR - II SRAM 4-WORD BURST 38-05615CY7C1410AV18/1425AV18/1412AV18/1414AV1836-MBIT QDR-II(TM) SRAM 2-WORD BURST 38-05614CY7C1411AV18/1426AV18/1413AV18/1415AV1836-MBIT QDR(TM)-II SRAM 4-WORD BURST 38-05616CY7C1416AV18/1427AV18/1418AV18/1420AV1836-MBIT DDR-II SRAM 2-WORD BURST 38-05618CY7C1417AV18/1428AV18/1419AV18/1421AV1836-MBIT DDR-II SRAM 4-WORD BURST 38-05617CY7C1422AV18/1429AV18/1423AV18/1424AV1836-MBIT DDR-II SIO SRAM 2-WORD BURST 38-05489CY7C1510V18/1525V18/1512V18/1514V1872-MBIT QDR-II SRAM 2-WORD BURST 38-05363CY7C1511V18/1526V18/1513V18/1515V1872-MBIT QDR(TM)-II SRAM 4-WORD BURST 38-05563CY7C1516V18/1527V18/1518V18/1520V1872-MBIT DDR-II SRAM 2-WORD BURST 38-05565CY7C1517V18/1528V18/1519V18/1521V1872-MBIT DDR-II SRAM 4-WORD BURST 38-05564CY7C1522V18/1529V18/1523V18/1524V1872-MBITDDR-II SIO SRAM 2-WORD BURSTDocument History PageDocument Title: RAM9 QDR-I/DDR-I/QDR-II/DDR- II Errata Document #: 001-06217 Rev. *CREV.ECN NO.IssueDateOrig. ofChange Description of Change**419849See ECN REF New errata for Ram9 QDR2/DDR2 SRAMs.*A493936See ECN QKS Added Output buffer and JTAG mode issues, Item#2 and #3Added 9Mb QDR-II Burst of 2 and QDR-1/DDR-I part numbers.*B733176See ECN NJY Added missing part numbers in the title for Spec#’s 38-05615,38-05614,38-05363,38-05563 on Table 5 on page 7.*C1030020 See ECN TBE Updated the fix status of the three issues, and modified the description forthe Output Buffer workaround for x9 devices on page 5.。
CN18J中文资料

NUMBER OF CYCLES AT 60Hz
FIG 4 . - TYPICAL JUNCTION CAPACITANCE JUNCTION CAPACITANCE, (pF)
2000 1000 500
FORWARD CURRENT, AMPERES
TJ = 25 °C
10
100 50
UPDATE : APRIL 23, 1998
元器件交易网
RATING AND CHARACTERISTIC CURVES ( CN18A - CN18M )
AVERAGE FORWARD OUTPUT CURRENT, AMPERES
FIG.1 - DERATING CURVE FOR OUTPUT RECTIFIED CURRENT PEAK FORWARD SURGE CURRENT, AMPERES
Typical Junction Capacitance (Note 1) Thermal Resistance, Junction to Case Junction Temperature Range Storage Temperature Range
Note : (1) Measured at 1.0 MHz and applied reverse Voltage of 4.0 V DC
CELL RECTIFIER DIODES
C18A
6.20
5.4
ANODE 1.43 CATHODE
0.51
0.38ቤተ መጻሕፍቲ ባይዱ
MECHANICAL DATA :
* Case : C18A * Terminals : Solderable per MIL-STD-202, Method 208 guaranteed * Polarity : Cathode to bigger size slug, For Anode to bigger size slug use "R" suffix. * Mounting position : Any * Weight : 0.29 gram Dimensions in millimeter
4.正泰控制产品介绍知识讲稿

接触器
三、交流接触器介绍 NC1系列
1、概述 NC1交流接触器主要用于交流交流50Hz/60Hz,额定电压至660V,在AC-3
使用类别下额定电流至95A的电路中,供远距离接通和分断线路之用,并可于 适当的热继电器组成电磁起动器,控制电动机的起动、停止等。
接触器
2.型号含义
N C 1 -□ □ □ □
NC7 9~620A
替代LC1-E
NC8 06M~500A、06M~38/Z
NC1
9~95A、 9~95Z
NC2
115~800A、115~400Z 500、800A无4极
NC6 6~9
接触器
CKJ5 125~630
CJ12 100~600A
CJ12Z
CZ0 40~600A 40C、40CA瞬时操作
3TB40 3TB41 3TB42 3TB43 3TB44
—
3TB46 3TB47 3TB48
—
3TB50
CJX1-9
CJX1-12
Hale Waihona Puke CJX1-16CJX1-22
CJX1-32
(CJX145)
CJX1-45
CJX1-63
CJX1-75
CJX1-85
CJX1110
3TF51 3TF52 3TF53 3TF54 3TF55 3TF56 3TF57 3TF68 3TF69
接触器
空气延时头
机械联锁机构
延时接触器 可逆接触器
接触器
热继电器 限流触头组
空气延时头 辅助触头组
磁力起动器 切换电容接触器
星三角起动器
接触器
1)额定工作电压至660V。 2)产品标称电流指380V额定工作电压下AC-3工作制的额定工作电流,
SC18IM700中文资料

1.General descriptionThe SC18IM700is designed to serve as an interface between the standard UART port of a microcontroller or microprocessor and the serial I 2C-bus;this allows the microcontroller or microprocessor to communicate directly with other I 2C-bus devices. The SC18IM700can operate as an I 2C-bus master. The SC18IM700 controls all the I 2C-bus specificsequences,protocol,arbitration and timing.The host communicates with SC18IM700with ASCII messages protocol; this makes the control sequences from the host to the SC18IM700 become very simple.2.Featuress UART host interface s I 2C-bus controllers Eight programmable I/O pinss High-speed UART: baud rate up to 460.8kbit/s s High-speed I 2C-bus: 400kbit/s s 16-byte TXFIFO s 16-byte RXFIFOs Programmable baud rate generator s 2.3V and 3.6V operation s Sleep mode (power-down)s UART message format resembles I 2C-bus transaction format s I 2C-bus master functions s Multi-master capabilitys 5V tolerance on the input pinss 8N 1 UART format (8 data bits, no parity bit, 1 stop bit)sAvailable in very small TSSOP16 package3.Applicationss Enable I 2C-bus master support in a system s I 2C-bus instrumentation and control s Industrial control s Medical equipment s Cellular telephones sHandheld computersSC18IM700Master I 2C-bus controller with UART interfaceRev. 01 — 28 February 2006Product data sheet4.Ordering information5.Block diagramTable 1:Ordering informationType numberPackage NameDescriptionVersionSC18IM700IPWTSSOP16plastic thin shrink small outline package;16leads;body width 4.4mmSOT403-1Fig 1.Block diagram of SC18IM700SC18IM700I 2C-BUS CONTROLLER002aab743V DDUARTSCLSDA GPIO REGISTERGPIOsRX TXWAKEUP8RESET V SS6.Pinning information6.1Pinning6.2Pin descriptionFig 2.Pin configuration for TSSOP16SC18IM700IPWGPIO0GPIO7GPIO1GPIO4RESETGPIO5V SS WAKEUP GPIO2V DD GPIO3GPIO6SDA TX SCLRX002aab79812345678109121114131615Table 2:Pin description Symbol Pin Type DescriptionGPIO01I/O programmable I/O pin GPIO12I/O programmable I/O pin RESET 3I hardware reset input V SS 4-groundGPIO25I/O programmable I/O pin GPIO36I/O programmable I/O pin SDA 7I/O I 2C-bus data pin SCL 8O I 2C-bus clock output RX 9I RS-232 receive input TX 10O RS-232 transmit input GPIO611I/O programmable I/O pin V DD 12-power supplyWAKEUP13IWake up SC18IM700 from Power-down mode. Pulling LOW by the host to wake up the device. A 1k Ω resistor must be connected between V DD and this pin.GPIO514I/O programmable I/O pin GPIO415O programmable I/O pin GPIO716Oprogrammable I/O pin7.Functional descriptionThe SC18IM700 is a bridge between a UART port and I2C-bus. The UART interfaceconsists of a full-functional advanced UART. The UART communicates with the hostthrough the TX and RX pins. The serial data format is fixed: one start bit, 8 data bits, andone stop bit.After reset the baud rate defaults to9600bit/s,and can be changed throughthe Baud Rate Generator (BRG) registers.After a power-up sequence or a hardware reset,the SC18IM700will send two continuousbytes to the host to indicate a start-up condition. These two bytes are 0x4F and 0x4B;‘OK’ in ASCII.7.1UART message formatThe host initiates an I2C-bus data transfer, reads from and writes to SC18IM700 internalregisters through a series of ASCII commands.Table3 lists the ASCII commandssupported by SC18IM700, and also their hexadecimal value representation.Unrecognized commands are ignored by the device.To prevent the host from handing the SC18IM700 due to an unfinished commandsequence, the SC18IM700 has a time-out feature. The delay between any two bytes ofdata coming from the host should be less than 655ms. If this condition is not met, theSC18IM700 will time-out and clear the receive buffer. The SC18IM700 then starts to waitfor the next command from the host.Table 3:ASCII commands supported by SC18IM700ASCII command Hex value Command functionS0x53I2C-bus ST ARTP0x50I2C-bus STOPR0x52read SC18IM700 internal registerW0x57write to SC18IM700 internal registerI0x49read GPIO portO0x4F write to GPIO portZ0x5A power down7.1.1Write N bytes to slave deviceThe host issues the write command by sending an S character followed by an I2C-busslave device address,the total number of bytes to be sent,and I2C-bus data which beginswith the first byte (DAT A 0) and ends with the last byte (DATA N). The frame is thenterminated with a P character. Once the host issues this command, the SC18IM700 willaccess the I2C-bus slave device and start sending the I2C-bus data bytes.Note that the second byte sent is the I2C-bus device slave address. The least significantbit (W) of this byte must be set to 0 to indicate this is an I2C-bus write command.7.1.2Read N byte from slave deviceThe host issues the read command by sending an S character followed by an I 2C-bus slave device address, and the total number of bytes to be read from the addressedI 2C-bus slave. The frame is then terminated with a P character. Once the host issues this command,the SC18IM700will access the I 2C-bus slave device,get the correct number of bytes from the addressed I 2C-bus slave, and then return the data to the host.Note that the second byte sent is the I 2C-bus device slave address. The least significant bit (R) of this byte must be set to 1 to indicate this is an I 2C-bus write command.7.1.3Write to 18IM internal registerThe host issues the internal register write command by sending a W character followed by the register and data pair. Each register to be written must be followed by the data byte.The frame is then terminated with a P character.Remark:Write and read from the internal 18IM register is processed immediately as soon as the intended register is determined by 18IM.Fig 3.Write N bytes to slave device002aac048NUMBER OF BYTESS CHAR.SLAVE ADR.+ Whost sends DATA 0DATA NP CHAR.Fig 4.Read N byte from slave device002aac049NUMBER OF BYTESS CHAR.SLAVE ADR.+ Rhost sends 18IM respondsP CHAR.DATA 0DATA NFig 5.Write to 18IM internal register002aac050W CHAR.REGISTER 0DATA 0REGISTER N DATA N P CHAR.7.1.4Read from 18IM internal registerThe host issues the internal register read command by sending an R character followed by the registers to be read. The frame is then terminated with a P character.Once the command is issued,SC18IM700will access its internal registers and returns the contents of these registers to the host.7.1.5Write to GPIO portThe host issues the output port write command by sending an O character followed by the data to be written to the output port. This command enables the host to quickly set any GPIO pins programmed as output without having to write to the SC18IM700 internal IOState register.7.1.6Read from GPIO portThe host issues the input port read command by sending an I character. This command enables the host to quickly read any GPIO pins programmed as input without having to read the SC18IM700 internal IOState register.Once the command is issued, SC18IM700 will read its internal IOState register and returns its content to the host.7.1.7Repeated START: read after writeThe SC18IM700 also supports ‘read after write’ command as specified in the Philips’I 2C-bus specification. This allows a read command to be sent after a write command without having to issue a STOP condition between the two commands.The host issues a write command as normal, then immediately issues a read command without sending a STOP (P) character after the write command.Fig 6.Read from 18IM internal register002aac051R CHAR.REGISTER 0REGISTER N P CHAR.18IM responds DATA 0DATA NFig 7.Write to output port002aac052O CHAR.DATA P CHAR.Fig 8.Read from output port002aac053I CHAR.18IM respondsDATAP CHAR.7.1.8Repeated START: write after writeThe SC18IM700 also supports ‘write after write’ command as specified in the Philips’I 2C-bus specification. This allows a write command to be sent after a write command without having to issue a STOP condition between the two commands.The host issues a write command as normal, then immediately issues a second write command without sending a STOP (P) character after the first write command.7.1.9Power-down modeThe SC18IM700can be placed in a low-power mode.In this mode the internal oscillator is stopped and SC18IM700 will no longer respond to the host messages. Enter thePower-down mode by sending the power-down character Z (0x5A) followed by the two defined bytes,which are 0x5A and followed by 0xA5.If the exact message is not received,the device will not enter the power-down state.Upon entering the power-down state, SC18IM700 places the WAKEUP pin in a HIGH state.T o have the device leave the power-down state,the WAKEUP pin should be brought LOW. A 1k Ω resistor must be connected between the WAKEUP pin and V DD .Fig 9.Repeated START: read after write002aac054NUMBER OF BYTESS CHAR.SLAVE ADR.+ W S CHAR.NUMBER OF BYTESSLAVE ADR. + RDATA 0DATA NP CHAR.18IM responds DATA 0DATA NFig 10.Repeated START: write after write002aac055NUMBER OF BYTESS CHAR.SLAVE ADR.+ W S CHAR.NUMBER OF BYTESSLAVE ADR. + WDATA 0DATA 0DATA N P CHAR.DATA N Fig 11.Power-down mode002aac056Z CHAR.0x5A 0xA5P CHAR.8.I 2C-bus serial interfaceThe I 2C-bus uses two wires (SDA and SCL) to transfer information between devices connected to the bus, and it has the following features:•Bidirectional data transfer between masters and slaves •Multi-master bus (no central master)•Arbitration between simultaneously transmitting masters without corruption of serialdata on the bus•Serial clock synchronization allows devices with different bit rates to communicate viaone serial bus•Serial clock synchronization can be used as a handshake mechanism to suspend andresume serial transfer.A typical I 2C-bus configuration is shown in Figure 12. The SC18IM700 device provides a byte-oriented I 2C-bus interface that supports data transfers up to 400kHz.9.Internal registers available9.1Register summaryFig 12.I 2C-bus configurationR PU002aab801V DDSC18IM700I 2C-BUS DEVICEI 2C-BUS DEVICEI 2C-busSDA SCLR PUTable 4:Internal registers summary Register address RegisterBit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0R/WGeneral register set0x00BRG0bit 7bit 6bit 5bit 4bit 3bit 2bit 1bit 0R/W 0x01BRG1bit 7bit 6bit 5bit 4bit 3bit 2bit 1bit 0R/W 0x02PortConf1GPIO3.1GPIO3.0GPIO2.1GPIO2.0GPIO1.1GPIO1.0GPIO0.1GPIO0.0R/W 0x03PortConf2GPIO7.1GPIO7.0GPIO6.1GPIO6.0GPIO5.1GPIO5.0GPIO4.1GPIO4.0R/W 0x04IOState GPIO7GPIO6GPIO5GPIO4GPIO3GPIO2GPIO1GPIO0R/W 0x05reserved bit 7bit 6bit 5bit 4bit 3bit 2bit 1bit 0-0x06I2CAdr bit 7bit 6bit 5bit 4bit 3bit 2bit 1bit 0R/W 0x07I2CClkL bit 7bit 6bit 5bit 4bit 3bit 2bit 1bit 0R/W 0x08I2CClkH bit 7bit 6bit 5bit 4bit 3bit 2bit 1bit 0R/W 0x09I2CTO TO7TO6TO5TO4TO3TO2TO1TER/W0x0AI2CStat1111I2CStat[3]I2CStat[2]I2CStat[1]I2CStat[0]R9.2Register descriptions9.2.1Baud Rate Generator (BRG)The baud rate generator is an 8-bit counter that generates the data rate for the transmitter and the receiver.The rate is programmed through the BRG register and the baud rate can be calculated as follows:Remark:To calculate the baud rate the values in the BRG registers must first be converted from hex to decimal.Remark:For the new baud rate to take effect, both BRG0 and BRG1 must be written in sequence (BRG0,BRG1)with new values.The new baud rate will be in effect once BRG1is written.9.2.2Programmable port configuration (PortConf1 and PortConf2)GPIO port 0 to port 7 may be configured by software to one of four types. These are:quasi-bidirectional, push-pull, open-drain, and input-only. Two bits are used to select the desired configuration for each port pin. PortConf1 is used to select the configuration for GPIO3to GPIO0, and PortConf2 is used to select the configuration for GPIO7to GPIO4.A port pin has Schmitt triggered input that also has a glitch suppression circuit.9.2.2.1Quasi-bidirectional output configurationQuasi-bidirectional output type can be used as both an input and output without the need to reconfigure the port. This is possible because when the port outputs a logic HIGH, it is weakly driven, allowing an external device to pull the pin LOW. When the pin is driven LOW, it is driven strongly and able to sink a fairly large current. These features aresomewhat similar to an open-drain output except that there are three pull-up transistors in the quasi-bidirectional output that serve different purposes.The SC18IM700is a 3V device,but the pins are 5V tolerant.In quasi-bidirectional mode,if a user applies 5V on the pin,there will be a current flowing from the pin to V DD ,causing extra power consumption. Therefore, applying 5V in quasi-bidirectional mode is discouraged.A quasi-bidirectional port pin has a Schmitt triggered input that also has a glitch suppression circuit.Baud rate 7.3728106×16BRG1BRG0,()+--------------------------------------------------=Table 5:Port configurations GPIOx.1GPIOx.0Port configuration00quasi-bidirectional output configuration 01input-only configuration 10push-pull output configuration 11open-drain output configuration9.2.2.2Input-only configurationThe input-only port configuration has no output drivers. It is a Schmitt triggered input that also has a glitch suppression circuit.9.2.2.3Push-pull output configurationThe push-pull output configuration has the same pull-down structure as both theopen-drain and the quasi-bidirectional output modes, but provides a continuous strong pull-up when the port latch contains a logic 1. The push-pull mode may be used when more source current is needed from a port output. A push-pull port pin has a Schmitt triggered input that also has a glitch suppression circuit.Fig 13.Quasi-bidirectional output configuration002aac0762 SYSTEM CLOCK CYCLESweakstrongvery weakV DDPPPV SS pin latch dataGPIOnglitch rejectioninput dataFig 14.Input-only configuration002aab884GPIO pinglitch rejectioninput dataFig 15.Push-pull output configuration002aab885strongV DDPV SSpin latch dataGPIO pinglitch rejectioninput dataN9.2.2.4Open-drain output configurationThe open-drain output configuration turns off all pull-ups and only drives the pull-down transistor of the port driver when the port latch contains a logic 0. To be used as a logic output,a port configured in this manner must have an external pull-up,typically a resistor tied to V DD .An open-drain port pin has a Schmitt triggered input that also has a glitch suppression circuit.9.2.3Programmable I/O pins state register (IOState)When read, this register returns the actual state of all I/O pins. When written, each register bit will be transferred to the corresponding I/O pin programmed as output.9.2.4I 2C-bus address register (I2CAdr)The contents of the register represents the device’s own I 2C-bus address. The most significant bit corresponds to the first bit received from the I 2C-bus after a STARTcondition. A logic 1 in I2CAdr corresponds to a HIGH level on the I 2C-bus, and a logic 0corresponds to a LOW level on the I 2C-bus.The least significant bit is not used,but should be programmed with a ‘0’.I2CAdr is not needed for device operation, but should be configured so that its address does not conflict with an I 2C-bus device address used by the bus master.9.2.5I 2C-bus clock rates (I2CClk)This register determines the serial clock frequency. The various serial rates are shown in Table 7. The frequency can be determined using the following formula:I2CClkH determines the SCL HIGH period,and I2CClkL determines the SCL LOW period.Fig 16.Open-drain output configuration002aab883V SS pin latch dataGPIO pinglitch rejectioninput dataTable 6:IOState - Programmable I/O pins state register (address 0x04h) bit description Bit Symbol Description7:0IOLevelSet the logic level on the output pins.Write to this register:logic 0 = set output pin to zero logic 1 = set output pin to oneRead this register returns states of all pins.bit frequency 7.3728106×2I2CClkH I2CClkL +()×---------------------------------------------------------------=Remark:The numbers used in the formulas are in decimal, but the numbers to program I2CClkH and I2CClkL are in hex.9.2.6I 2C-bus time-out (I2CTO)The time-out register is used to determine the maximum time that SCL is allowed to be LOW before the I 2C-bus state machine is reset.When the I 2C-bus interface is running,I2CTO is loaded after each I 2C-bus state transition.The least significant bit of I2CTO (TE bit) is used as a time-out enable/disable. A logic 1will enable the time-out function. The time-out period can be calculated as follows:The time-out value may vary, and it is an approximate value.9.2.7I 2C-bus status register (I2CStat)This register reports the I 2C-bus transmit and receive frame status, whether the frame transmits correctly or not.Table 7:I 2C-bus clock frequencyI2CClk(I2CClkH +I2CClkL)I 2C-bus clock frequency 10 (minimum)369kHz 15246kHz 25147kHz 30123kHz 5074kHz 6061kHz 10037kHzTable 8:I2CTO - I 2C-bus time-out register (address 0x09h) bit description Bit Symbol Description 7:1TO[7:1]time-out valueTEenable/disable time-out function logic 0 = disable logic 1 = enabletime-out period I2CTO[7:1]256×57600-------------------------------------------seconds=Table 9:I 2C-bus status Bit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1Bit 0I 2C-bus status description 11110000I2C_OK11110001I2C_NACK_ON_ADDRESS 11110010I2C_NACK_ON_DAT A 11111I2C_TIME_OUT10.Limiting values[1]This product includes circuitry specifically designed for the protection of its internal devices from thedamaging effects of excessive static charge.Nonetheless,it is suggested that conventional precautions be taken to avoid applying greater than the rated maximum.[2]Parameters are valid over operating temperature range unless otherwise specified. All voltages are with respect to V SS unless otherwise noted.[3]Based on package heat transfer, not device power consumption.Table 10:Limiting valuesIn accordance with the Absolute Maximum Rating System (IEC 60134).[1][2]Symbol ParameterConditions Min Max Unit T amb(bias)bias ambient temperature −55+125°C T stg storage temperature −65+150°C V I input voltagereferenced to V SS −0.5+5.5VI OH(I/O)HIGH-level output current per input/output pin GPIO3 to GPIO7-20mA all other pins-8mA I OL(I/O)LOW-level output current per input/output pin -20mA I I/O(tot)(max)maximum total I/O current-120mA P tot /packtotal power dissipation per package[3]-1.5W11.Static characteristics[1]Typical ratings are not guaranteed. The values listed are at room temperature, 3V .[2]See Table 10 “Limiting values” for steady state (non-transient) limits on I OL or I OH . If I OL /I OH exceeds the test condition, V OL /V OH may exceed the related specification.[3]Pin capacitance is characterized but not tested.[4]Measured with GPIO in quasi-bidirectional mode.[5]Measured with GPIO in high-impedance mode.[6]GPIO in quasi-bidirectional mode with weak pull-up (applies to all GPIO pins with pull-ups). Does not apply to open-drain pins.[7]GPIO pins source a transition current when used in quasi-bidirectional mode and externally driven from logic 1to logic 0.This current is highest when V I is approximately 2V .Table 11:Static characteristicsV DD =2.4V to 3.6V; T amb =−40°C to +85°C; unless otherwise specified.Symbol Parameter Conditions MinTyp [1]MaxUnitI DDsupply currentV DD =3.6VOperating mode; f =7.3728MHz -915mA Idle mode; f =7.3728MHz - 3.255mA Power-down mode (sleep);GPIO0 to GPIO7 as inputs;inputs at V DD-5070µAV POR power-on reset voltage--0.2V V th(HL)negative-going threshold voltageexcept SCL, SDA 0.22V DD 0.4V DD -V V IL LOW-level input voltage SCL, SDA only −0.5-0.3V DD V V th(LH)positive-going threshold voltageexcept SCL, SDA-0.6V DD 0.7V DD V V IH HIGH-level input voltage SCL, SDA only0.7V DD- 5.5V V OL LOW-level output voltageI OL =20mA [2]-0.6 1.0V I OL =3.2mA[2]-0.20.3V V OHHIGH-level output voltageI OH =−20mA; Push-pull mode;GPIO3 to GPIO70.8V DD--V I OH =−3.2mA; Push-pull mode;GPIO0to GPIO2V DD −0.7V DD −0.4-V I OH =−20mA; quasi-bidirectional mode; all GPIOsV DD −0.3V DD −0.2-V C io input/output capacitance [3]--15pF I IL LOW-level input current logical 0; all ports; V I =0.4V [4]--−80µA I LI input leakage currentall ports; V I =V IL or V IH[5]--−10µA I T(HL)negative-going transition current logical 1-to-0; all ports; V I =2.0V at V DD =3.6V [6][7]−30-−450µA R RESET_N(int)internal pull-up resistance on pin RESET10-30k Ω12.Dynamic characteristicsTable 12:I 2C-bus timing characteristicsAll the timing limits are valid within the operating supply voltage and ambient temperature range; V DD =2.4V to 3.6V;T amb =−40°C to +85°C; and refer to V IL and V IH with an input voltage of V SS to V DD .SymbolParameterConditionsStandard modeI 2C-bus Fast mode I 2C-bus UnitMinMax Min Max f SCL SCL clock frequency01000400kHz t BUF bus free time between a STOP and START condition4.7- 1.3-µs t HD;STA hold time (repeated) ST ART condition 4.0-0.6-µs t SU;ST A set-up time for a repeated ST ART condition 4.7-0.6-µs t SU;STO set-up time for STOP condition 4.0-0.6-µs t HD;DA T data hold time0-0-ns t VD;ACK data valid acknowledge time -0.6-0.6µs t VD;DA T data valid time LOW-level -0.6-0.6µs HIGH-level-0.6-0.6µs t SU;DA T data set-up time250-100-ns t LOW LOW period of the SCL clock 4.7- 1.3-µs t HIGH HIGH period of the SCL clock 4.0-0.6-µs t f fall time of both SDA and SCL signals -0.3-0.3µs t r rise time of both SDA and SCL signals -1-0.3µs t SPpulse width of spikes that must be suppressed by the input filter-50-50ns Fig 17.I 2C-bus timingSDASCL002aab271t fSSrPSt HD;STAt LOWt rt SU;DATt ft HD;DATt HIGH t SU;ST At HD;ST At SPt SU;STOt rt BUF13.Package outlineFig 18.Package outline SOT403-1 (TSSOP16)UNIT A 1A 2A 3b p c D (1)E (2)(1)e H E L L p Q Z y w v θ REFERENCESOUTLINE VERSION EUROPEAN PROJECTIONISSUE DATE IECJEDEC JEITAmm0.150.050.950.800.300.190.20.15.14.94.54.30.656.66.20.40.30.400.0680oo 0.130.10.21DIMENSIONS (mm are the original dimensions)Notes1. Plastic or metal protrusions of 0.15 mm maximum per side are not included.2. Plastic interlead protrusions of 0.25 mm maximum per side are not included.0.750.50SOT403-1MO-15399-12-2703-02-18w Mb pD Ze0.2518169θAA 1A 2L p Qdetail XL(A )3H EE cv M AXAy0 2.5 5 mmscaleTSSOP16: plastic thin shrink small outline package; 16 leads; body width 4.4 mmSOT403-1Amax.1.1pin 1 index14.Soldering14.1Introduction to soldering surface mount packagesThis text gives a very brief insight to a complex technology. A more in-depth account ofsoldering ICs can be found in our Data Handbook IC26; Integrated Circuit Packages(document order number 939865290011).There is no soldering method that is ideal for all surface mount IC packages. Wavesoldering can still be used for certain surface mount ICs,but it is not suitable forfine pitchSMDs. In these situations reflow soldering is recommended.14.2Reflow solderingReflow soldering requires solder paste (a suspension of fine solder particles, flux andbinding agent) to be applied to the printed-circuit board by screen printing, stencilling orpressure-syringe dispensing before package placement. Driven by legislation andenvironmental forces the worldwide use of lead-free solder pastes is increasing.Several methods exist for reflowing; for example, convection or convection/infraredheating in a conveyor type oven. Throughput times (preheating, soldering and cooling)vary between 100seconds and200seconds depending on heating method.Typical reflow peak temperatures range from215°C to270°C depending on solder pastematerial. The top-surface temperature of the packages should preferably be kept:•below 225°C (SnPb process) or below 245°C (Pb-free process)–for all BGA, HTSSON..T and SSOP..T packages–for packages with a thickness≥2.5mm–for packages with a thickness <2.5mm and a volume≥350mm3 so calledthick/large packages.•below 240°C (SnPb process) or below 260°C (Pb-free process) for packages with a thickness <2.5mm and a volume <350mm3 so called small/thin packages.Moisture sensitivity precautions, as indicated on packing, must be respected at all times.14.3Wave solderingConventional single wave soldering is not recommended for surface mount devices(SMDs) or printed-circuit boards with a high component density, as solder bridging andnon-wetting can present major problems.To overcome these problems the double-wave soldering method was specificallydeveloped.If wave soldering is used the following conditions must be observed for optimal results:•Use a double-wave soldering method comprising a turbulent wave with high upwardpressure followed by a smooth laminar wave.•For packages with leads on two sides and a pitch (e):–larger than or equal to 1.27mm, the footprint longitudinal axis is preferred to beparallel to the transport direction of the printed-circuit board;–smaller than 1.27mm, the footprint longitudinal axis must be parallel to the transport direction of the printed-circuit board.The footprint must incorporate solder thieves at the downstream end.•For packages with leads on four sides, the footprint must be placed at a 45° angle tothe transport direction of the printed-circuit board. The footprint must incorporate solder thieves downstream and at the side corners.During placement and before soldering, the package must be fixed with a droplet of adhesive. The adhesive can be applied by screen printing, pin transfer or syringe dispensing. The package can be soldered after the adhesive is cured.Typical dwell time of the leads in the wave ranges from 3seconds to 4seconds at 250°C or 265°C, depending on solder material applied, SnPb or Pb-free respectively.A mildly-activated flux will eliminate the need for removal of corrosive residues in most applications.14.4Manual solderingFix the component by first soldering two diagonally-opposite end e a low voltage (24V or less) soldering iron applied to the flat part of the lead. Contact time must be limited to 10seconds at up to 300°C.When using a dedicated tool, all other leads can be soldered in one operation within 2seconds to 5seconds between 270°C and 320°C.14.5Package related soldering information[1]For more detailed information on the BGA packages refer to the (LF)BGA Application Note (AN01026);order a copy from your Philips Semiconductors sales office.[2]All surface mount (SMD) packages are moisture sensitive. Depending upon the moisture content, the maximum temperature (with respect to time) and body size of the package, there is a risk that internal or external package cracks may occur due to vaporization of the moisture in them (the so called popcorn effect). For details, refer to the Drypack information in the Data Handbook IC26; Integrated Circuit Packages; Section: Packing Methods .[3]These transparent plastic packages are extremely sensitive to reflow soldering conditions and must on no account be processed through more than one soldering cycle or subjected to infrared reflow soldering with peak temperature exceeding 217°C ±10°C measured in the atmosphere of the reflow oven.The package body peak temperature must be kept as low as possible.Table 13:Suitability of surface mount IC packages for wave and reflow soldering methodsPackage [1]Soldering method Wave Reflow [2]BGA, HTSSON..T [3], LBGA, LFBGA, SQFP ,SSOP ..T [3], TFBGA, VFBGA, XSONnot suitable suitable DHVQFN, HBCC, HBGA, HLQFP , HSO, HSOP ,HSQFP , HSSON, HTQFP , HTSSOP , HVQFN,HVSON, SMS not suitable [4]suitablePLCC [5], SO, SOJ suitablesuitable LQFP , QFP , TQFPnot recommended [5][6]suitable SSOP , TSSOP , VSO, VSSOPnot recommended [7]suitable CWQCCN..L [8], PMFP [9], WQCCN..L [8]not suitablenot suitable。
NC7SZ18P6X;NC7SZ18L6X;NC7SZ18FHX;中文规格书,Datasheet资料

Ultra-High Speed: tPD 2.5ns Typical at 5V VCC High Impedance Output when Deselected Broad VCC Operating Range: 1.65V to 5.50V Power Down High Impedance Inputs/Outputs Over-Voltage Tolerance Inputs Facilitate 5V to 3V Translation Proprietary Noise/EMI Reduction Circuitry Ultra-Small MicroPak™ Packages
Condition Min.
TA=+25°C Typ. Max.
TA=-40 to +85°C Min.
0.75VCC 0.70VCC
Unit
Max.
V 0.25VCC 0.30VCC V
VIH VIL
0.75VCC 0.70VCC 0.25VCC 0.30VCC 1.55 VIN=VIH, IOH=-100µA 2.20 2.90 4.40 IOH=-4mA IOH=-8mA IOH=-16mA IOH=-24mA IOH=-32mA 1.29 1.90 2.40 2.30 3.80 1.65 2.30 3.00 4.50 1.52 2.15 2.80 3.68 4.20 0.00 VIN=VIL IOL=100µA 0.00 0.00 0.00 IOL=4mA IOL=8mA IOL=16mA IOL=24mA IOL=32mA VIN=5.5V, GND VIN=VIL or VOH 0<VOUT 5.5V VIN or VOUT=5.5V 0.08 0.10 0.15 0.22 0.22 0.10 0.10 0.10 0.10 0.24 0.30 0.40 0.55 0.55 ±0.1 ±0.5 1 1
NC车床常用资料

第一部分基本常识一.车床静态精度测量:1.机械重量及占地面积:V16: 3200KG 3290×1500 V20: 3200KG 3290×1500V26/60: 4200KG 3770×1740 V26/110:6000KG 3770×1740V36/85: 8500KG 4675×1985 V36/125:9100KG 5075×1985V46: 13500KG 6210×29802.电源容量及电线规格:(是在220V下的,括号内为380V的)电源容量电线规格开关规格V16: 23KVA 14(10) 100A(60)V20: 23KVA 14(10) 100A(60)V26: 40KVA 22(14) 150A(100)V36: 54KVA 38(22) 225A(150)V46: 75KVA 50(30) 225A(150)3.静态测试:1).主芯轴偏转:表针与被测物成90°2).主芯轴孔的偏转:主芯轴孔中装上试棒,主轴旋转3).主心轴孔与刀塔Z轴的平行度:主轴孔内装试棒,表置于刀塔,移动刀塔,试棒长150MM4).主心轴凸圆端面的偏差:5).顶尖偏转:主轴装顶尖,表触于顶尖锥面上,与表成直角,主轴旋转.此项包括主心轴用顶尖及尾座用旋转顶尖6).主心轴及尾座心轴的中心线的高度差:主心轴及尾座间支顶试棒,表放于刀塔上,移动刀塔,测量两端.用200长试棒主轴端低,尾座端高7).尾座心轴中心线与刀塔Z轴中心线的平行度4.动态切削:1.外径切削: 材料:45#φ75×200. 允许公差0.015, 真圆度0.005切削条件:S1200--1500RPM, F0.12 U0.152.顶尾座:材料:45# φ50×300 允许差0.02 真圆度:0.02 切削条件:同上3.端面:材料:FC25(铸铁), φ200或φ300 平坦度0.02(中凹) 端面摆幅:0.005 切削条件:S370 F0.12 4.刀塔重复定位精度:测量长度:150 允许差:±0.0035.刀塔换刀定位精度:360度5次换刀, 指示值的1/2加上±号为测定值. 允许差为±0.003 ±0.0055.接电后检查:1. 主开关ON后,看机台的压力表(夹头,主压力,尾座心轴压力的压力表),主轴马达及电气箱的散热风扇运转正常.若不正常表示相位接反2.强电箱内NFB2 ON后,强电板及轴向卡有电:强电板的过电流保护开关:内部资料严禁外传1NF1 ON:则电源灯亮NF2 ON:则TR1有电源输入(小变压器)NF3 ON:则有110V电源输入NF4 ON :则工作灯有亮NF5 ON:则25,26脚的电压为DC24V NF6 ON :则润滑油泵有电3.压下POWER ON,并在压下紧急停止开关情形下,在诊断画页下确认面板的每个按键均工作正常后打开急停二.G指令:1.G32:直线螺纹G32 Z F F:螺距L1:不完整螺纹. L1=S*P/400 L2:不完整螺纹. L2=S*P/18002.G92:螺纹切削 G92 X(U) Z(W) (R) F ;R:切斜度螺纹,外径为+,内径为- X:第一刀深度Z:车牙长度3.G76:螺纹循环G76 P(M)(R)(A)Q(DMIN)R(D); G76X(U)Z(W)R(I)P(K)Q(D)F(F);M:精加工次数,1--99. R:倒角量 00--99 A:刀尖角度,两位数D:最小切削深度,可用参数0726指定R:精车留量,1/1000MM K:最终螺纹高度, D:第一次切深,半径4.G90:轴向复循环G90 X Z F ;G94:径向复循环 G94 X Z F :5.G71:自动车削复循环 G71 U R ; U:每次切深,半径R:每次提刀量G71 P Q U W F ; U:X精车予留量,半径,内径为负W:Z予留量 G70:精车G70 P Q F ;注:1.G70,G71起点必须一样, 2.循环开始单节必须以G00,X移动,不能有Z移动G01;3.循环中F是精车的4.G71可单独使用,G70不可6.G72:纵向复循环G72 W R ; G72 P Q U W F ;7.G74:Z啄式钻孔G74 R ; G74 X Z P Q F ;R:退刀量P:X\方向每次移动量,半径无正负,钻孔不用Q:Z方向每次切深,无正负单位:1/1000MM8.G75:X轴啄式沟槽循环G75 R ; G75 X Z P Q F ;P:X每次切深,半径值,无正负, 单位:1/1000MMQ:Z每次切移量,让其小于刀宽, 单位:1/1000MM9.G97:用于螺纹切,钻孔,半径段差较小,主轴转速一定 S=1000*V/(3.14*D) S:一定10.G96:主轴线速一定 V:一定11.G50:最高转速设定内部资料严禁外传2第二部分故障排除一.电器故障排除一).AL--1047 TOOL NO.ERROR 数刀SENSOR故障1).检查刀架板,重焊接OK2).试车半小时又复发3).量刀架板电压太低17DCV4).检查继电器板OK5).跳线板M101-29/32至M111-17脚假焊6).重新焊接,测试OK二).刀塔无法旋转原因:110A对64信号线1).查马达上方之电磁阀SOL3A电阻是否为12).查动力线110A对64号是否110V电压3).将断线接妥,测试OK三).刀塔定位后无法再启动原因:定位SENSOR未感应到1).检查DGN16的信号2).发现16.3的信号未感应到3).拆钣金将其调整到有感应四).刀具选择灯不亮原因:RELAY不良1).开机后测试换刀2).刀塔伸出后无法旋转,检查电磁阀是否动作,测量110A,71,72线是否110V3).检查CR7,CR8是否动作4).更换CR7RELAY五).刀塔不定位原因:铁屑造成刀塔SENSOR不良1).检查诊断16信号:X16.0 正常 X16.1一直为1 X16.2正常 X16.3 正常2).正常要感应到才为13).消除SENSOR上铁屑(X16.1的SENSOR)六).AL-414原因:三相电压跳掉1).送电后油压马达动作2).电表量其无3).检查BREAK无跳脱4)再检查外部电压发现BREAK坏常无缘无故自动跳掉七).1070 AL-414原因:LA-AL放电晶体烧坏1).查伺服马达动力线有否断线2).查伺服机对调是否正常内部资料严禁外传33).查中层板放电晶体S3885坏,电阻值太小4).更换S38851070:MACHINE READY ERROR1).TIMER设定错2).RELAY故障3).断线414 SERVO ALARM:X轴DETECT ERR八).AL-414原因:刹车器可变电阻不良1).测试机台原点100%时会发生414AL2).查DGN720无AL3).检查刹车器电压0V4).调整时有时无电压,拆下电阻接点已炭化5).更换电阻OK6).测试原点100%正常九).AL-401:SERVO ALARM(VRDY OFF)原因:POWER SUPPLY不良1).检查110V正常,过载保护器无跳脱2).检查PMC Y48.0-F148.6无信号3).更换POWER SUPPLY OK4).试车OK十).AL-400,AL-408,AL-414,AL-424原因:电源供应模组故障1).检查三相电压2).检查POWER SUPPLY模组的DC 300V输出3).检查POWER SUPPLY模组的DC24V4).判断POWER SUPPLY模组故障,更换OK十一).AL-400,AL-414,AL-424原因:1).Z轴伺服PCB板烧坏2).Z轴伺服全波整流组及伺服功率晶体烧坏3).X轴伺服中层板故障对策: 1).X轴PCB板LV-ALARM灯亮2).Z轴15A的BREAK开关跳脱3).1,2为在客户理发现的问题4).检查Z轴伺服功率晶体短路(烧坏),全波整流组(短路,烧坏) 更换OK5).检查Z轴伺服PCB板故障及放电晶体OK更换基板6).检查X轴伺服PCB板功率晶体,放电晶体全波整流组OK7).检查三相输入电压228,225,2278).检查110\V的电压为1099).CHECK轴向卡OK10).更换X轴伺服中层板,试车OK十二).AL-401原因:油压电磁开关线圈短路1).开机时并无油压动作2).检查油压保护电驿OK3).检查电磁开关线圈短路4).请客户购买3A1A的电磁接触器更换OK 十三).1).未装图形卡 2).车牙90度退刀 3).RCA 4).M65M66相反内部资料严禁外传4对策:1)将MEM卡的CCX5的CONNENCT改至CCX4,改参数909.0,12),3)改参数109为0,907.3为1,916.7为04).将电磁阀的线路对调OK十四).AL1071,408,409,424原因:断线检查线路发现脚踏开关的线路破皮造成漏电十五).AL-945,408原因:串列式子板坏1).更换MEM卡无效2).更换主轴串列式子板OK十六).加工中产生AL930(偶发)原因:主机板故障1).更换轴向卡无效2).更换主机板观察一个月确定正常十七).AL-910原因:IC接触不良1).开机后产生AL-910 2).检查MEM卡,120ROM IC3).将IC拆下,发现IC脚弯曲4).将IC脚打直,重新安装,OK十八).准备不足原因:刀控板(130号)线断1).开机检查诊断21.4无信号2).检查紧急开关正常3).检查X,Z轴极限正常4).量刀控板X轴线路至Z轴线路有断线(130号线--133号线)5).重新压接130号线至刀控板130号端子座6).试车OK十九).X轴无法原点原因:铁屑造成1).检查X16.5讯号永为1 2).拆下X轴侧黑盖板金将铁屑清除3).放大参数700为999999 4).执行原点复归5).将参数700改为100000二十).无法开机原因:记忆卡故障1).查荧幕影象管后方是否有灯亮2).查POWER ON,OFF 动作是否可开机3).查记忆卡CRT线有否断线4).更换记忆卡,测试OK二十一).1).ER2无法开机2).乱刀原因:1).0V,24V短路,自制I/O卡烧毁,FUSE烧毁2).插销磨毁对策:1).将POWER UNIT上之FUSE和I/O卡之FUSE更换OK2).因面板信号已不正常鼓换自制I/O卡,并量其电阻,正常3).0V,24V的电阻158左右,正常4).检查SENSOR电阻正常,SENSOR信号也无误5).检查并整理刀架板OK6).还是无效,但因都是逆转较易无法定位,顾应为插销磨毁二十三).无法开机内部资料严禁外传5原因:电源线路短路1).检查电源线路阻抗2).检查24N线路3).I/O卡线路烧断,IC破裂,RELAY板24N线路短路4).带回厂维修5).维修完毕,安装,开机测试,ER2亮6).检查DGNY10.7为1,检查CR01线路7).检查MCH,MCL1,MCL2电磁开关8).更换MCL2,过载保护器及保险丝5.0A9).试车OK二十四).荧幕无法开启原因:轴向卡不良1).开机后POWER UNIT跳脱亮红灯2).检查POWER UNIT输出电源线路24N,正负15V,5V3).检查24N与0V阻抗值约146欧母,正常,15V与0V短路4).检查电脑各PCB板,轴向卡15V与0V短路5).更换轴向卡,试车OK二十五).荧幕加工时会消失(偶发)原因:荧幕(CRT)不良1).将图形卡CCX4的CONNECT座改至MEM卡之CCX5的CONNECT2).并将图形卡脱离拆下3).测试观察,隔日再发4).量POWER UNIT输出至CRT电压正常5).更换荧幕测试6).隔日未发生二十六).荧幕无显示原因:POWER UNIT故障1).将POWER ON打开,查看POWER UNIT出现红灯ALARM2).检查主机板0V,5V及0V,24N无短路现象3).将POWER UNIT脱离测试结果POWER UNIT出现ALARM4).更换POWER UNIT二十七).银幕无法翻页原因:老鼠咬断M3至荧幕按键信号线1).检查银幕按键正常2).检查MEM卡(M3)至荧幕按键20C的线路有断路3).在输送带接头处有老鼠咬断线路4).重新用开口端子压接20C线路5).测试OK二十八).荧幕无字幕(反黄)原因:MEM卡故障1).将图形卡CCX4的CONNECT座改至MEM卡的CCX5的CONNECT2).并将图形卡脱离3).测试重新开机无效4).将机台做重新INITIAL无效内部资料严禁外传65).更换MEM卡重新INTIAL OK6).重新记忆参数,诊断7).试车OK二十九).操作模式无法转到手动位置(JOG)原因:信号线断一条1).检查DGN10.4,10.5,10.6,10.72).发现10.6的信号无3).检查后发现焊接线脱落,接回OK三十).选择性停止灯不亮原因:断线1).检查客户反应按键可动作但灯不亮2).检查Y82.4的讯号输出OK3).检查按键LED灯OK4).检查跳线板M109-13到M117-13断线,重接,OK三十一).AL-1007(AL-01)原因:接触不良1).检查马达是否真的过热,马达正常2).检查CN2灯CONNECT OK3).检查主轴马达9 PIN的线路正常4).无断线,接回后试车OK三十二)主轴转速失控原因:老鼠咬断线1).手动转速启动时转速成递增至3500RPM2).检查可变电阻1千欧的优劣3).检查主轴模组4).检查JY1至手动可变电阻的线路断线5).重新接妥断线,试车OK三十三).刹车器无法放开原因:端子台上的端子接触不良(松脱)1).检查端子台25,26直流电是否为20V左右,时有时无2).检查电路图,端子9,20,24,25,26发现端子20号在端子台上松脱3).重新固定端子台上的端子,试车OK三十四).1).油压打不上来,2).520AL 3).101AL 4).AL-414 5).X轴异音6).1047AL原因:1).马达转向错误 2).程式当机3).可变电阻不良1).修改线路2).X轴移动时有异音并产生AL4143).检查可变电阻输出电压调整无效4).更换可变电阻OK5).换刀测试OK,观察讯号OK6).可户试车突然产生101 P/SAL7).将PWE=0改为18).将参数46.7,64.4改为1,翻页至诊断修改C9B9的DATA,将之复原为09).将46.7,64.4改为0,试车OK内部资料严禁外传7三十五).油压无动作,轴向无动作原因:保险丝坏1).开机查看故障信号,面板ER1,ER2亮2).查看主轴驱动器上七段显示器所显示故障信号,显示AL-033).检查驱动器,保险丝坏4).R相150A保险丝断,更换保险丝,试车OK三十六).AL-01原因:主轴马达温度检出器坏1).用表量CN2的CONNECT第2,3脚,测得阻抗断路现象2).将CN2第2,3脚短路,开机测试主轴旋转,OK三十七).主轴高档无效原因:桥式整流器坏1).检查桥式整流器阻抗43-110为7欧左右,低档,OK 43-111为10欧左右,高档OK2).将离合器电线拆除,检查整流器输入电压28V OK,输出电压无3).更换整流器,OK三十八).ER1机板 AL-12原因:功率晶体坏1).检查功率晶体必须拆除动力线,这样量比较准确2).采用比较方式,电表转至二极体档,量得结果坏1只3).检查机板做初步判定,保险丝与电晶体若是无坏可直接装上试车,不然就必须更换机板,以免功率晶体又烧坏三十九).主轴无法定位原因:主轴不动,动力线断1).拆主轴盖板金,量测马达为0.3欧,OK2).查看主轴驱动器是否会跳AL,无3).测量主轴马达控制器到马达的动力线W相断4).将W相断线接妥,测试OK四十).当机原因:ER11).查CN2信号线没断线2).查参数设定更正3003.1为0,0.3为0,0.4为13).查外部接线紧急停止24N断线接妥,测试OK四十一).主轴刹车时间过长(约10秒)原因:P TYPE机板烧毁1).检查功率晶体,管状保险丝正常2).量测机板电晶体烧毁,更换机板OK3).量测电压227V正常,试车OK四十二).ER1原因:CONNECT脱落1).检查功率晶体OK 2).检查推动板正常 3).CONNECT接触不良,重新接回,OK 四十三).ER1原因:I/O卡不良1).检查功率晶体,机板正常2).测试时主轴无问题,ER1 LAMP依然亮内部资料严禁外传83).检查ER1 LAMP的灯号线路正常4).拆下I/O卡发现有油渍造成短路5).更换新品,试车OK四十四).主轴刹车无效原因:1)功率晶体烧毁2)管状保险丝烧毁1).检查主轴DRIVER DC,AC管状FUSE,更换烧毁的FUSE2).检查功率晶体,更换不良品3).检查机板推动部分正常,OK四十五).准备不足原因:KEY-BOARD的重置键会卡住1).查EMERGENCY STOP线路是否断线2).查CR01及CR31是否有动作及LED亮3).查为KEY-BOARD重置键会卡住,拆回厂维修,安装OK四十六).暂停键无效原因:按键不良1).检查暂停键讯号X14.6未输入2).检查线路判断不置于诊断线情形3).研判按键不良,更换OK四十七).Z轴无法原点原因:LIMIT99号损坏1).采取原点快速进给无效2).采取手轮方式Z轴可移动3).检查DGN信号X0.1错误4).更换OK四十八).切削水不动作原因:防水接头不良1).检查切削水(强制)是否有信号,信号正常2).检查R,S,T三相是否有输入至电磁开关电压为220V3).检查电磁开关,过载保护器正常4).检查切削水防水接头的电压无220V,欠相,有烧焦现象5).更换OK四十九).AL-1024原因:POT DOWN SENSOR1).检查PMC的AL-1024的信号2).发现6.2,6.3未感应3).AL-1024的AL SENSOR不可两个都感应4).调整到适当位置五十).1).机台无法启动2).按键不良原因:客户接错线路1).开机MACHINE NOT READY,量0V,24N欧姆驱近"0"2).排除面板按键上的0V,24N短路的现象,更换POWER UNIT上的F14 FUSE和I/O卡上的FUSE(5A) OK3).0V,24N电阻为147左右,OK4).将不良按键更换,OK内部资料严禁外传9五十一).尾座带动销无法带动原因:尾座碰杆调整不良1).检查DGN X0.0,X0.1,X0.2,X0.3信号正常2).带动销无法带动,调整碰杆位置,OK3).后拖尾座无误,前拖调整DGN 325 OK五十二).感应不良原因:SENSOR不良1).DGN511---2 2).以手动测试ATC换刀3).检查DGN信号X8.0--X8.3 4).检查SENSOR线路5).更换SENSOR,OK五十三).输送带不动原因:电磁开关坏1).检查110V电压2).检查过载保护器3).检查电磁开关线圈4).更换电磁开关,OK 五十三).换档启动键灯号一直闪烁原因:LIMIT松脱1).测试换档,无法入档2).检查LIMIT线路,24N,102,103,104号线3).拆变速箱板金4).检查LIMIT是否可正常动作5).调整LIMIT高度6).测试换档,检视X2.7,X4.0,X4.1 DGN信号,试车OK五十四).2024 AL(尾座LIMIT信号错误)原因:LIMIT(近接开关)坏1).检查DGN信号2).X17.2正常,X17.3异音,一直为13).更换X17.3上的LIMIT4).调整尾座带动销距离,OK五十五).输送带不走原因:过载保护器烧坏1).查U4,V4,W4导线有无断线2).查防水接头公及母的有没有潮湿烧坏3).查过载保护器有无异味烧坏4).查马达有无短路或开路-0,或23.5或1号5).更换过载保护器,测试OK五十六).工作灯不亮原因:工作灯泡坏1).检查工作灯座有24V电压2).工作灯二段式开关正常3).工作灯线圈断4).更换工作灯炮,试车OK五十七).AL-1047原因:铁屑造成SENSOR感应不良1).手动测试换刀,刀塔伸出,无法旋转内部资料严禁外传102).检查110A,64,65号线路3).检查电磁阀4).检查SENSOR信号,DGN X16.0,X16.1,X16.2,X16.35).刀塔伸出后X16.3保持为1,无法消除6).拆刀塔板金,检查SENSOR7).消除覆盖在SENSOR上的铁屑,试车OK五十八).ATC不动作(马达过热)原因:ATC马达坏1).将马达三相电源线接回2).开机检查ATC马达的刹车器电压在DC99V OK3).接回刹车器电线4).开机测试换刀30分5).用手感应马达没有发热现象,OK五十九).强力切削水不动作原因:U1电源线断线(端子台至连接器)1).检查泵线圈,OK2).检查电磁开关及过载保护器,OK3).检查电磁开关输入侧有220VAC电源(开机中),强力切削按键压下,电磁开关动作但泵不动作4).检查线路发现端子台至马达连接器的U1线路断线5).将普通切削线路(U2,V2,W2)与强力切削线路(U1,V1,W1)对调,测试OK六十).尾座芯轴不动作原因:电磁阀坏1).检查尾座芯轴按键,OK(IN--X18.3,OUT--X18.7)2).检查电磁阀110A--67阻抗32欧姆左右,OK, 110A--66阻抗无穷大坏3).更换电磁阀,OK六十一).刹车时间太长 AL-1012原因:1).修改P6580--40改为50 OK (不可高于55)2).修改D335--1500改为1350,OK (不可低于1000,向客户讲解修改的危险性) 六十二).手动正反转无效原因:参数未开(SPINDLE JOG OK)1).模式在自动执行位置,按正转主轴不转2).由CRT检查PLC图至D688.0断线3).将PWE=0改为1,程式保护键OFF4).将D688.0设定为15).测试OK六十三).无法原点原因:第三代按键面板坏1).检查+X,+Z按键信号,无信号(X20.3,20.1)2).检查面板,其它按键,开关信号OK3).更换第四代面板4).测试按键信号功能,OK六十四).无法连线原因:烧掉一组传输IC 更换第二组传输IC内部资料严禁外传111).I/O—2 2).参数50.0与50.7改13).914.4为1 4).参数250--105).MEM卡的M5插座改至M74六十五).尾座无法带动原因:感应碰块位置跑掉1).查看DGN0.0,0.1,0.2,0.3的信号2).当1101时为正常,看带动销伸出位置(太早)3).将带动杆调紧,直到对准位置,OK六十六).520AL原因:尾座拖过头1).查更改701行程放大无效2).查为尾座极限过行程3).更改参数15号为100 4).将ER2消除尾座往前拖5).更改参数为15号为0 6).测试OK六十七).程式尾座无法完成原因:DGN设定错误1).测试程式2).程式执行至M12或M13后,程式无法继续执行3).检查DGN Y84.0,Y86.7信号4).检查PLC图,因DGN445.2--1,使信号保持住,无法切换5).DGN445.2--0六十八).刚性功牙时会跳准备不足原因:主轴参数(p6500--P6599)不符1).检查Z轴马达,快速进给时不会发生准备不足2).核对Z轴马达参数(P8300--P8399)正确3).核对主轴参数(P6500--P6599)有不符4).此机台是双段P6556需更改981,P6559需更改4189未改之前为P6556--1000,P6559--1000此参数为单段六十九).刀架异常1.刀架旋转不停1).95号的感应不良,诊断16.3为0所致.将板金拆下,调整感应开关,使16.3为12).节流阀有异物,清除即可3).电器问题2.刀架精度:1).X轴方向,量外径公差2丝.2).Z轴方向是刀架刀座面公差2丝3).旋转定位不准:固定刀架的螺帽松;吻合齿轮内的M8×35,8支,M8×45,8支松拆下刀架固紧;吻合齿轮已打到底部,更换;X轴斜销活动面无法吃油;予拉螺帽松所致3.刀架卡刀:1).刀架选1号跳2号2).油量过大3).齿轮间隙大,调偏心轮轴,或调整大齿轮的定位键螺丝松4.油不良问题:油多久未更换,使用的是何种油5.冷机状况下产生先行主轴旋转,使油箱热后,方可旋转七十).荧幕无法开机:1.检查POWET ON/OFF按键是否正常,线路有无开路内部资料严禁外传122.检查POWER SUPPLY 的R.S 相电源是否有输入,电压是否为220A.CP1使用插PIN 方式连接,若PIN 孔受损,强行安装将使PIN 后退,而产生接触不良,造成电压无法输入或电压不足B.POWER SUPPLY 内的VS11(R.S 相突波吸收器)是否遭突波电压袭损3.检查POWER SUPPLY 的RY3,RY4 RELAY 是否内阻过大(RY3,RY5)在动作时, 如火花过大,RELAY 接点将被磨损,而使电流过大4.检查MASTER 上的+5V-0V 是否短路A.假如短路POWER SUPPLY 取下测试正常,一安装至MASTER 测试POWER ON 时,POWER SUPPLY的ALM 红灯亮B.一般可先拆下I/O 卡AXES 卡及MEMORY(M4,M12,M26,M27) 以先排除外部短路5.检查POWER SYPPLY 输出的24V DC 电压是否正常A.检查CP15 PIN 安装是否正确(供应CRT 电源用)B.检查24V 电源是否送至CRT(可拆下CRT 电源线检查)6.检查CRT 的映像管是否有亮光(在正常的CRT 输入24V 电源后,映像管应微微亮,否则CRT 坏) 七十一).荧幕出现准备不足:1.检查荧幕上是否有故障,2.是否是过硬体极限所致3.检查RELAY 板上的CR31是否有动作,一般在ESP 放开后,CR31 RELAY 将动作,否则在CR31线路上必有断路4.按CONTROL ON 键,是否能READY,如可,POWER ON TIMER 设没定时间可能太长,依正确输入七十二).X 轴可移动Z 轴无法移动:1.检查油压马达是否动作,压力是否足够2.检查尾座带动开关检出环是否脱落,无法检出,尾座带动杆,动作时力量很大,常使带动开关检出环的SET螺丝脱落而无法检出,可在带动杆上攻牙,使杆与环成为一体3.检查尾座行程LIMIT 是否被检出(会产生520报警)内部资料 严禁外传13七十三).510 ALARM(+X 过行程)发生原因可由X 轴机械坐标值判断1.机械坐标值大于参数700,此为原点检出SENSOR 检出不良或X 轴跳PITCH,调整SENSOR 或重校X轴安全距离2.机械坐标值小于参数700,此为机械关机时,X 轴滑落引起,可先放大参数700,再原点,在原点位置压ESP观察X 轴滑落情形,正常情形为压下ESP,X 轴电源切断与刹车器开始动作有一个时间差,会造成X 轴轻微下滑,当刹车器动作后,即停止滑落.滑落值太大或一直滑落为刹车器故障,而完全没有滑落,则为加工中,刹车器根本未动作,亦为不正常七十四).520 ALARM可由Z 轴机械坐标值或移动判断1.机械坐标值大于参数701, 此为原点检出SENSOR 检出不良或Z 轴跳PITCH,调整SENSOR 或重校X轴安全距离2.Z 轴只能前进,不能后退,此为尾座后退极限被尾座碰块感应引起,一般为将参数15.2设定为1(+Z 过行程无效),将Z 轴原点,再将尾座带至机械中央,参数15.2设定为0,再将尾座带回.(也可拆除尾座过行程碰块)七十五).一般故障:1.开机后READY 即产生ER2而无其他故障:START 按键卡住为1,让机械误判为未原点即执行程式2.程式执行至M03无法往下执行:A.安全门是否锁紧 C.未输入S 转速指令B.夹头监视灯是否动作 D.检查正反转按钮指示灯是否亮3.程式执行至M03产生ER2:A.检查夹头监视时间是否太短(当夹头开始动作至按下启动键时间快于夹头监视时间(一般设定为1.5秒),即产生ER2,勿任意更改此参数,以免工件飞出B.电池松动,荧幕下方出现BAT ALARM4.部分M 机能无效:同一程式单节中有两个以上M 机能,后面M 机能无效5.主轴转速不稳定:A.主轴速度检出器皮带是否太松B.DRIVER 参数设定错误C.DA2输入电压不稳定:CR15(手动/自动)RELAY A OR B 内阻过大,VR1可]变电阻故障;M26-7与CN1-31线路间内阻过大D.PCB 的VCMD 漂移过大(需更换PCB)2-20接地不良或未接F.速度检出器故障G.使用G96机能未消除H.轴向移动引起转速变化七十六).活动门太紧的处理:1.除污片太紧的处理:将活动门处的除污片拆除后拉活动门看是否还太紧,如已松了则一片一片装回看装到哪一块变紧将此片除污片处理2.底部滑轮与滑轨干涉:一般拆除除污片后后如还是太紧可将门拆下看下面轮子是否有干涉,一般干涉为轮子的两边可用车床将他车掉一点.二.机械故障排除:内部资料 严禁外传14 一).尾座不良讯号:1.尾座无法带动:A.过极限,改参数15.2B.尾座强制,将Z 轴以手动摇至芯轴带动处,将尾座强制带动C.将尾座底的极限板金拆除,再将尾座带动至负方向再至正方向,板金复原且不要碰到极限开关2.Z轴无法移动至原点:检查尾座的诊断0.0无变1所致,调整尾座芯轴的带动芯轴下方的近接开关,开关接触不良3.尾座无法带动:芯轴的近接开关的诊断0.1无变1所致,与(2)相同处理二)常用动作:各轴的安全距离调整, 中心距的调整, 头部的调整,X轴的拆装常识,刀架的拆装精度调整, 吃油太凶的维修, 润滑泵的清洁无压力的基本调整三)车床的基本调整精度:1.刀架X轴方向精度为±0.022.刀架Z轴方向精度为±0.023.头部精度100L+0.01,200L+0.0154.中心钻A.快速夹为例4.0中心钻+0.1内 B.成形夹为例4.0中心钻+0.2内5.中心补正标准补法:比中心点大为负,加原508的数值例:508中原为-750.0,机械坐标测为-221.5,中心点为-220.0,则221.5-220.0=1.5,比中心点大,则508中补为-1500-750=-22506.尾座的调整为:200L的两顶心切削为0.015,300L为0.02以内PS:尾座的工件夹持需工件的20MM内夹持为正确,调整后检查尾座芯轴伸出精度,为Z轴负方向开始至正方向其芯轴精度为0.015以内,必须负方向高于正方向,其作用为顶刀用四).中心调整:1.将X轴移至中心位置:V16,20为-220.0, V26为-360.0, V36为-540.0, V46为-610.02.表针压在内径刀座内3.调整X轴上下移动至45º,床轨方向上下的读数基本一致4.读出此时X轴坐标位置,得出中心点差值5.修改参数508,关机重开6.调整安全距离五).主轴异音:1.工具:千分表,六角扳手,铁锤,錾子,夹头扳手,活动扳手,一字起子,黄油2.判断方法: 1).去除检出皮带检查是否检出器异音2).去除主轴皮带检查主轴马达或主轴异音3).去除油压缸旋转主轴检查油压缸是否异音3.更换方法: 1).利用夹头扳手将拉杆与夹头分离(在放松,拉紧状况时)2).在拉杆拉的情况下去除夹头6根固定螺丝,拆除夹头3).X.Z退到原点4).关机,去除回转缸,油管及回油5).去除盛水槽6).去除连接板与回转缸固定螺丝7).拉出回转缸8).去除主轴皮带及检出器皮带9).放松<图一>螺帽后将连接板去除10).将<图二>螺帽去除(须先放松三个固定螺丝)拉出皮带轮11).<图三>螺母去除,及<图四>22螺丝去除内部资料严禁外传1512)拉出主轴4.安装方法: 1).擦净主轴及箱体本身,接触后涂黄油2).装入箱体内,锁紧<图四>22螺丝(图五有一排水口须向下)3).将<图二>螺帽敲紧.4).齿形皮带轮及皮带轮内孔涂黄油后装入主轴(皮带轮倒角较大的与齿形带接触5).<图二>螺帽敲紧三个固定螺丝锁紧(螺纹部分涂黄油)6).<图一>螺母先选入主轴内连接板敲紧7).<图一>螺母敲紧以压紧连接板8).量表量连接板与回转缸接触面跳动0.01~0.039).将螺母固定螺丝锁紧10).装皮带及检出皮带11).装上回转缸测其光滑面精度在0.02以内(先锁上3根螺丝以锤敲35处,如表回乱跳表示锁的不紧,不会跳表示锁的太紧12).3根螺丝锁紧后将其他螺丝锁紧13).锁上油管,回油管,盛水槽座开机,检查是否漏油14).将主轴及夹头锥度接触面擦净后先用3根螺丝将主轴固定在主轴上15).利用夹头拆除扳手将夹头与拉杆连接16).在夹头夹的情况下量其精度17).锁上小黑盖,及<图七>54螺丝,试运转注:1.各接触面不可有毛边,并保持清洁2.螺纹处涂黄油六).Z轴异音:1.Z轴后培林不良:1).拆除后伸缩护板2).将螺帽放松3).用快速移动Z轴看是否还有声音,如没有表示后培林损坏2.Z轴前培林不良1).一般如果后培林没坏而移动时还有声音则有可能前培林损坏2).将传动箱上黑盖拆除3).将Z轴伺服马达拆下试转有无异音(先将马达与球螺杆作记号)4)拆除予压盖5).用手将球螺杆旋出来(此时不可硬转)6).将固定螺帽敲除,培林拆下(如黄油变成不是白色的就是已经损坏,拆下时须注意三个培林的方向性)7).更换后按方向装回3.大档板及伸缩护板不良1).大档板异音:A.检查除污片是否有坏B.检查大档板是否撞到Z轴伺服马达,如有可调整大档板后面与一块白色耐磨塑料尼龙2).伸缩护板异音:A.检查是否积屑或润滑不良B.调整伸缩护板固定螺丝在最佳状况七).V-36 X轴上下培林及刹车器更换步骤A.工具及料件:内部资料严禁外传16。
CY7C1515AV18资料

Page 2 of 31 [+] Feedback
元器件交易网
Logic Block Diagram (CY7C1513AV18)
CY7C1511AV18, CY7C1526AV18 CY7C1513AV18, CY7C1515AV18
18 D[17:0]
A(19:0) 20
■ Variable drive HSTL output buffers
■ JTAG 1149.1 compatible test access port
■ Delay Lock Loop (DLL) for accurate data placement
Configurations
CY7C1511AV18 – 8M x 8 CY7C1526AV18 – 8M x 9 CY7C1513AV18 – 4M x 18 CY7C1515AV18 – 2M x 36
Address Register
21
A(20:0)
2M x 8 Array 2M x 8 Array 2M x 8 Array 2M x 8 Array
Read Data Reg. 32 16
16
Control Logic
RPS
C C
Reg.
Reg. 8 8
Reg.
8
8
8
CQ CQ Q[7:0]
Logic Block Diagram (CY7C1526AV18)
Address Register
21
A(20:0)
2M x 9 Array 2M x 9 Array 2M x 9 Array 2M x 9 Array
Read Data Reg. 36 18
NC7SZ157

®TinyLogic UHS 2-Input Non-Inverting MultiplexerFeaturesBroad V CC Operating Range: 1.65V to 5.5VUltra High-SpeedPower Down High-Impedance Inputs/OutputsOver-Voltage Tolerance Inputs Facilitate 5V to 3V TranslationProprietary Noise/EMI Reduction CircuitryUltra-Small MicroPak™ PackagesSpace-Saving SC70 Package DescriptionThe NC7SZ157 is a single, high performance, 2-to-1 CMOS non-inverting multiplexer from Fairchild’s Ultra-High Speed series of TinyLogic®. The device is fabricated with advanced CMOS technology to achieve ultra high speed with high output drive while maintaining low static power dissipation over a broad V CC operating range. The device is specified to operate over the 1.65V to 5.5V V CC operating range. The inputs and outputs are high impedance when V CC is 0V. Inputs tolerate voltages up to 5.5V independent of V CC operating range.Ordering InformationPart Number Top Mark EcoStatus Package PackingMethodNC7SZ157P6X ZF7 RoHS 6-Lead SC70, EIAJ SC-88, 1.25mm Wide 3000 Units on Tape & ReelNC7SZ157L6X B9 RoHS 6-Lead MicroPak™, 1.00mm Wide 5000 Units on Tape & ReelNC7SZ157FHX B9 Green 6-Lead, MicroPak2, 1x1mm Body, .35mm Pitch 5000 Units on Tape & ReelFor Fairchild’s definition of Eco Status, please visit: /company/green/rohs_green.html.NC7SZ157 — TinyLogic ® UHS 2-Input Non-Inverting MultiplexerFigure 1. Logic SymbolPin ConfigurationsFigure 2. SC70 (Top View)Figure 3. MicroPak™ (Top Through View)Figure 4. Pin 1 OrientationNotes:1. AAA represents product code top mark (see Ordering Information ).2. Orientation of top mark determines pin one location.3. Reading the top mark left to right, pin one is the lower left pin.Pin DefinitionsPin # SC70Pin # MicroPakNameDescription1 1 I 1 Data Input2 2 GND Ground3 3 I 0 Data Input4 4 Z Output5 5 V CC Supply Voltage6 6 S Control InputFunction TableNC7SZ157 — TinyLogic ® UHS 2-Input Non-Inverting MultiplexerSymbol Parameter Min. Max. UnitV CC Supply Voltage -0.5 7.0 V V IN DC Input Voltage -0.5 7.0 V V OUT DC Output Voltage -0.57.0 V I IK DC Input Diode Current V IN ≤ 0.5V -50 mA I OK DC Output Diode Current V OUT ≤ -0.5V-50 mA I OUT DC Output Current±50 mA I CC or I GND DC V CC or Ground Current±50 mA T STG Storage Temperature Range -65 +150 °C T J Junction Temperature Under Bias+150 °C T L Junction Lead Temperature (Soldering, 10 Seconds)+260°CP DPower Dissipation at +85°CSC70-6 180 mW MicroPak-6 130 MicroPak2-6 120ESD Human Body Model, JEDEC:JESD22-A114 4000 VCharge Device Model, JEDEC:JESD22-C1012000Recommended Operating ConditionsThe Recommended Operating Conditions table defines the conditions for actual device operation. Recommended operating conditions are specified to ensure optimal performance to the datasheet specifications. Fairchild does not recommend exceeding them or designing to Absolute Maximum Ratings.Symbol ParameterConditions Min. Max. UnitV CCSupply Voltage Operating1.655.50VSupply Voltage Data Retention1.50 5.50 V IN Input Voltage 0 5.5 V V OUT Output Voltage0 V CC V T A Operating Temperature-40+85 °Ct r , t f Input Rise and Fall TimesV CC at 1.8V ± 0.15V, 2.5V ± 0.2V0 20 ns/VV CC at 3.3V ± 0.3V 0 10 V at 5.0V ± 0.5V5® UHS 2-Input Non-Inverting MultiplexerV OHHIGH LevelOutput VoltageV IN =V IL or V IH I OH = -100µAV2.30 2.20 2.30 2.203.00 2.90 3.00 2.904.50 4.40 4.50 4.401.65V IN =V ILor V IHI OH = -4mA1.29 1.52 1.292.30 I OH = -8mA1.902.15 1.903.00 I OH = -16mA2.40 2.80 2.403.00 I OH = -24mA 2.30 3.68 2.304.50 I OH = -32mA 3.904.203.80V OLLOW LevelOutput Voltage1.65V IN =V IL or V IHI OL = 100µA 0 0.10 0.10V2.30 0 0.10 0.103.00 0 0.10 0.104.50 0 0.10 0.101.65V IN =V ILor V IHI OL = 4mA0.08 0.24 0.24 V2.30 I OL = 8mA0.10 0.30 0.30 3.00 I OL = 16mA0.15 0.40 0.40 3.00 I OL = 24mA 0.22 0.55 0.55 4.5 I OL = 32mA0.22 0.55 0.55 I IN Input Leakage Current0 to 5.50V IN =5.5V, GND±0.1±1µA I OFF Power OffLeakage Current0 V IN or V OUT =5.5V 1 10 µAI CCQuiescent SupplyCurrent1.65 to 5.50 V IN =5.5V, GND10µA® UHS 2-Input Non-Inverting Multiplexert PLH, t PHLFigure 5Figure 6Propagation Delay I n to ZC L =15pF, R L =1M Ω, 5.00 ± 0.50 1.2 3.5 5.8 1.2 6.1 3.30 ± 0.30 0.8 2.6 3.9 0.8 4.2 5.00 ± 0.500.5 1.9 3.1 0.5 3.3 Propagation Delay S to Z3.30 ± 0.30 C L =50pF, R L =500Ω, 1.2 3.24.8 1.25.2 5.00 ± 0.50 0.8 2.4 3.8 0.8 4.1 Propagation Delay I n to Z3.30 ± 0.30 C L =50pF, R L =500Ω,1.2 3.2 4.6 1.2 5.05.00 ± 0.50 0.8 2.4 3.7 0.8 4.0C IN Input Capacitance 0.002pFC PDPower DissipationCapacitance (4)3.3014pF Figure 75.00 17Note:4. C PD is defined as the value of the internal equivalent capacitance which is derived from dynamic operatingcurrent consumption (I CCD ) at no output loading and operating at 50% duty cycle. C PD is related to I CCD dynamic operating current by the expression: I CCD =(C PD )(V CC )(f IN )+(I CC static).Note:5. C L includes load and stray capacitance.Input PRR=1.0MHz, t w =500ns.Figure 5. AC Test CircuitFigure 6. AC WaveformsInput=AC Waveform; PRR=Variable; Duty Cycle=50%.® UHS 2-Input Non-Inverting MultiplexerDETAIL ASCALE: 60X1.000.801.100.800.10C0.250.100.460.260.20GAGE PLANE(R0.10)30°0°SEATING PLANEC0.100.00NOTES: UNLESS OTHERWISE SPECIFIEDA) THIS PACKAGE CONFORMS TO EIAJ SC-88, 1996.B) ALL DIMENSIONS ARE IN MILLIMETERS. C) DIMENSIONS DO NOT INCLUDE BURRS OR MOLD FLASH.D) DRAWING FILENAME: MKT-MAA06AREV62.10±0.300.10A B0.651.30(0.25)0.300.15131.300.40 MINSEE DETAIL ALAND PATTERN RECOMMENDATIONFigure 8. 6-Lead, SC70, EIAJ SC-88, 1.25mm WidePackage drawings are provided as a service to customers considering Fairchild components. Drawings may change in any manner without notice. Please note the revision and/or date on the drawing and contact a Fairchild Semiconductor representative to verify or obtain the most recent revision. Package specifications do not expand the terms of Fairchild’s worldwide terms and conditions, specifically the warranty therein, which covers Fairchild products.Always visit Fairchild Semiconductor’s online packaging area for the most recent package drawings: /packaging/.® UHS 2-Input Non-Inverting Multiplexer2. DIMENSIONS ARE IN MILLIMETERS1. CONFORMS TO JEDEC STANDARD M0-252 VARIATION UAAD MAC06AREVCNotes:3. DRAWING CONFORMS TO ASME Y14.5M-1994TOP VIEWRECOMMENED LAND PATTERNBOTTOM VIEWA0.55MAX0.05C(0.52)(0.30)6X 1X6X PIN 1DETAIL A0.075 X 45CHAMFER0.250.150.350.250.400.300.5(0.05) 1.0DETAIL APIN 1 TERMINAL0.400.300.450.350.100.000.10C B A 0.05CC0.05C0.050.005X 5X 6X(0.13)4X6XFigure 9. 6-Lead, MicroPak™, 1.0mm WidePackage drawings are provided as a service to customers considering Fairchild components. Drawings may change in any manner without notice. Please note the revision and/or date on the drawing and contact a Fairchild Semiconductor representative to verify or obtain the most recent revision. Package specifications do not expand the terms of Fairchild’s worldwide terms and conditions, specifically the warranty therein, which covers Fairchild products.Always visit Fairchild Semiconductor’s online packaging area for the most recent package drawings: /packaging/.®UHS 2-Input Non-Inverting Multiplexer DETAIL A5XFigure 10. 6-Lead, MicroPak2, 1x1mm Body, .35mm PitchPackage drawings are provided as a service to customers considering Fairchild components. Drawings may change in any mannerwithout notice. Please note the revision and/or date on the drawing and contact a Fairchild Semiconductor representative to verifyor obtain the most recent revision. Package specifications do not expand the terms of Fairchild’s worldwide terms and conditions, specificallythe warranty therein, which covers Fairchild products.Always visit Fairchild Semiconductor’s online packaging area for the most recent package drawings:/packaging/.NC7SZ157 — TinyLogic ® UHS 2-Input Non-Inverting Multiplexer。
MAX8887EZK18中文资料
General DescriptionThe MAX8887/MAX8888 low-dropout linear regulators operate from a +2.5V to +5.5V input and deliver up to 300mA continuous (500mA pulsed) current. The MAX8887 is optimized for low-noise operation, while the MAX8888 includes an open-drain POK ouput flag. Both regulators feature exceptionally low 100mV dropout at 200mA. These devices are available in a variety of pre-set output voltages in the +1.5V to +3.3V range.An internal PMOS pass transistor allows the low 55µA supply current to remain independent of load, making these devices ideal for portable battery-powered equip-ment such as personal digital assistants (PDAs), cellu-lar phones, cordless phones, and notebook computers.Other features include a micropower shutdown mode,short-circuit protection, thermal shutdown protection,and an active-low open-drain power-OK (POK) output that indicates when the output is out of regulation. The MAX8887/MAX8888 are available in a thin 5-pin SOT23package that is only 1mm high.________________________ApplicationsNotebook Computers Wireless HandsetsPDAs and Palmtop Computers Digital Cameras PCMCIA Cards Hand-Held InstrumentsFeatureso Guaranteed 300mA Ouput Current (500mA for pulsed loads)o Low 100mV Dropout at 200mA Load o POK Output (MAX8888)o 42µV RMS Ouput Noise (MAX8887)o Preset Output Voltages (1.5V, 1.8V, 2.85V, and 3.3V)o 55µA No-Load Supply Currento Thermal-Overload and Short–Circuit Protection o Foldback Ouput Current-Limit Protection o 60dB PSRR at 1kHz o 0.1µA Shutdown Currento Thin 5-Pin SOT23 Package, 1mm HighMAX8887/MAX8888Low-Dropout, 300mA Linear Regulators in SOT23________________________________________________________________Maxim Integrated Products 1Pin ConfigurationsTypical Operating Circuit19-1859; Rev 0; 12/00For price, delivery, and to place orders,please contact Maxim Distribution at 1-888-629-4642,or visit Maxim’s website at .Ordering Information*Other versions (xy) between +1.5 and +3.3V are available in 100mV increments. Contact factory for other versions. Minimum order quantity is 25,000 units.M A X 8887/M A X 8888Low-Dropout, 300mA Linear Regulators in SOT232_______________________________________________________________________________________ABSOLUTE MAXIMUM RATINGSELECTRICAL CHARACTERISTICS(V IN = V OUT + 1V, SHDN = IN, T A = -40°C to +85°C, unless otherwise noted.) (Note 1)Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.IN, SHDN , POK, to GND........................................-0.3V to +6.0V OUT, BP to GND............................................-0.3 to (V IN + 0.3V)Output Short-Circuit Duration.....................................Continuous Continuous Power Dissipation (T A = +70°C)5-Pin SOT23 (derate 9.1mW/°C above +70°C)............727mWOperating Temperature Ranges..........................-40°C to +85°C Junction Temperature......................................................+150°C Storage Temperature Range.............................-65°C to +150°C Lead Temperature (soldering, 10s).................................+500°CMAX8887/MAX8888Low-Dropout, 300mA Linear Regulators in SOT23_______________________________________________________________________________________3ELECTRICAL CHARACTERISTICS (continued)(V IN = V OUT + 1V, SHDN = IN, T A = -40°C to +85°C, unless otherwise noted.) (Note 1)Note 2:Typical and maximum dropout voltage for different output voltages are shown in Typical Operating Characteristics curve.Typical Operating Characteristics(Typical Operating Circuit , T A = +25°C, unless otherwise noted.)01.00.52.01.53.02.53.52.03.03.52.54.04.55.05.5OUTPUT VOLTAGE vs. INPUT VOLTAGEINPUT VOLTAGE (V)O U T P U T V O L T A G E (V )-1.0-0.6-0.80.0-0.2-0.40.20.40.80.61.010050150200250300OUTPUT VOLTAGE ACCURACYvs. LOAD CURRENTM A X 8887-8 t o c 02LOAD CURRENT (mA)% D E V I A T I O N (%)0-0.05-0.02-0.03-0.04-0.010.00.010.020.030.040.05-4010-15356085OUTPUT VOLTAGE ACCURACYvs. TEMPERATURETEMPERATURE (°C)% D E V I A T I O NM A X 8887/M A X 8888Low-Dropout, 300mA Linear Regulators in SOT234_______________________________________________________________________________________020406080100120140160010050150200250300DROPOUT VOLTAGE vs. LOAD CURRENTLOAD CURRENT (mA)V D R O P O U T (m V )501001502002503002.5 2.7 2.93.1 3.3DROPOUT VOLTAGE vs. OUTPUT VOLTAGEV OUT (V)V D R O P O U T (m V )1.02.03.04.05.0INPUT VOLTAGE (V)0502510075125150GROUND-PIN CURRENT vs. INPUT VOLTAGEG R O U N D -P I N C U R R E N T (µA )02060408010010050150200250300GROUND-PIN CURRENT vs. LOAD CURRENTLOAD CURRENT (mA)G R O U N D -P I N C U R R E N T (µA )5056545258606264666870-4010-15356085GROUND-PIN CURRENT vs. TEMPERATURETEMPERATURE (°C)G R O U N D -P I N C U R R E N T (µA )700.010.111010010006050403020POWER-SUPPLY REJECTION RATIOvs. FREQUENCYFREQUENCY (kHz)P S R R (d B)10MAX8887OUTPUT NOISE DC TO 1MHzV OUT 50µV/divTIME (40ms/div)LOAD-TRANSIENT RESPONSE50mV/div AC-COUPLED 300mA10mAV OUTI OUTTIME (10µs/div)Typical Operating Characteristics (continued)(Typical Operating Circuit , T A = +25°C, unless otherwise noted.)MAX8887/MAX8888Low-Dropout, 300mA Linear Regulators in SOT23LINE-TRANSIENT RESPONSE20mV/div AC-COUPLED+4V+4.5VV OUTV INV OUT = +3.3V I LOAD = 100mATIME (100µs/div)SHUTDOWN WAVEFORMV SHDN1V/divDC-COUPLED2V/divV OUTTIME (20µs/div)POK WAVEFORMMAX8887-9 toc152V/div2V/div2V/divV OUT V POK V INV OUT = +3.3V, R LOAD = 100ΩTIME (20ms/div)Pin DescriptionFUNCTIONRegulator Input. Supply voltage can range from 2.5V to 5.5V. Bypass with 2.2Capacitor Selection and Regulator Stability ).Active-Low Shutdown Input. A logic low reduces the supply current to below 0.1In shutdown, POK and OUT are driven low. Connect to IN for normal operation.Open-Drain Active-Low POK Output. POK remains low while the output voltage (V below the reset threshold. Connect a 100k Ω pullup resistor to OUT to obtain a logic level output. POK is driven low in shutdown. If not used, leave this pin unconnected.Reference Bypass. Bypass with a low-leakage 0.01µF ceramic capacitor.LOAD-TRANSIENT RESPONSENEAR DROPOUT50mV/div AC-COUPLED300mA10mAV OUTI OUTTIME (10µs/div)Typical Operating Characteristics (continued)(Typical Operating Circuit , T A = +25°C, unless otherwise noted.)Detailed DescriptionThe MAX8887/MAX8888 are low-dropout, low-quies-cent-current linear regulators designed primarily for battery-powered applications. The devices supply loads up to 300mA and are available in several fixed output voltages in the +1.5 to +3.3V range. The MAX8887 is optimized for low-noise operation, while the MAX8888 includes an open-drain POK output flag.As illustrated in F igure 1, the MAX8888 consists of a 1.25V reference, error amplifier, P-channel pass tran-sistor, and internal feedback voltage divider.Internal P-Channel Pass TransistorThe MAX8887/MAX8888 feature a 0.5ΩP-channel MOSF ET pass transistor. Unlike similar designs using PNP pass transistors, P-channel MOSF ETs require no base drive, which reduces quiescent current. PNP-based regulators also waste considerable current in dropout when the pass transistor saturates and use high base drive currents under large loads. The MAX8887/MAX8888 do not suffer from these problems and consume only 55µA of quiescent current under heavy loads as well as in dropout.Ouput Voltage SelectionThe MAX8887/MAX8888 are supplied with various fac-tory-set output voltages ranging from 1.5V to 3.3V. The part number ’s two-digit suffix identifies the nominal out-put voltage. F or example, the MAX8887EUK33 has a preset output voltage of 3.3V (see Ordering Infor-mation ).ShutdownDrive SHDN low to enter shutdown. During shutdown,the output is disconnected from the input and supply current drops to 0.1µA. When in shutdown, POK and OUT are driven low. SHDN can be pulled as high as 6V, regardless of the input and output voltages.Power-OK OutputThe power-OK output (POK) pulls low when OUT is less than 93% of the nominal regulation voltage. Once OUT exceeds 93% of the nominal voltage, POK goes high impedance. POK is an open-drain N-channel output.To obtain a logic level output, connect a pullup resistor from POK to OUT. A 100k Ωresistor works well for most applications. POK can be used as a power-on-reset (POR) signal to a microcontroller (µC) or to drive other logic. Adding a capacitor from POK to ground creates POK delay. When the MAX8887 is shut down, POK is held low independent of the output voltage. If unused,leave POK grounded or unconnected.Current LimitThe MAX8887/MAX8888 monitor and control the pass transistor ’s gate voltage, limiting the output current to0.8A (typ). This current limit is reduced to 500mA (typ)when the output voltage is below 93% of the nominal value to provide foldback current limiting.Thermal-Overload ProtectionThermal-overload protection limits total power dissipa-tion in the MAX8887/MAX8888. When the junction tem-perature exceeds T J =+170°C, a thermal sensor turns off the pass transistor, allowing the device to cool. The thermal sensor turns the pass transistor on again after the junction temperature cools by 20°C, resulting in a pulsed output during continuous thermal overload con-ditions. Thermal overload protection protects the MAX8887/MAX8888 in the event of fault conditions. For continuous operation, do not exceed the absolute maxi-mum junction-temperature rating of T J =+150°C.Operating Region and Power DissipationThe MAX8887/MAX8888’s maximum power dissipation depends on the thermal resistance of the IC package and circuit board. The temperature difference between the die junction and ambient air, and the rate of air flow.The power dissipated in the device is P = I OUT ✕(V IN -V OUT ). The maximum allowed power dissipation is 727mW or:P MAX = (T J(MAX)- T A ) / (θJC + θCA )where T J(MAX)-T A is the temperature difference between the MAX8887/MAX8888 die junction and the surrounding air; θJC is the thermal resistance from the junction to the case; and θCA is the thermal resistance from the case through PC board, copper traces, and other materials to the surrounding air.Refer to Figure 2 for the MAX8887/MAX888 valid oper-ating region.Noise ReductionF or the MAX8887 only, an external 0.01µF bypass capacitor at BP creates a lowpass filter for noise reduc-tion. The MAX8887 exhibits 42µV RMS of output voltage noise with C BP = 0.01µF and C OUT = 2.2µF (see Typical Operating Characteristics ).Applications InformationCapacitor Selection and RegulatorStabilityConnect a 2.2µF ceramic capacitor between IN and ground and a 2.2µF ceramic capacitor between OUT and ground. The input capacitor (C IN ) lowers the source impedance of the input supply. Reduce noise and improve load-transient response, stability, and power-supply rejection by using a larger ceramic out-put capacitor such as 4.7µF.The output capacitor ’s (C OUT ) equivalent series resis-tance (ESR) affects stability and output noise. Use out-M A X 8887/M A X 8888Low-Dropout, 300mA Linear Regulators in SOT236_______________________________________________________________________________________put capacitors with an ESR of 0.1Ωor less to ensure sta-bility and optimum transient response. Surface-mount ceramic capacitors have very low ESR and are com-monly available in values up to 10µF. Connect C IN and C OUT as close to the MAX8887/MAX8888 as possible to minimize the impact of PC board trace inductance.Noise, PSRR, and Transient ResponseThe MAX8887/MAX8888 are designed to operate with low dropout voltages and low quiescent currents in bat-tery-powered systems while still maintaining excellent noise, transient response, and AC rejection. See the Typica l Opera ting Cha ra cteristics for a plot of power-supply rejection ratio (PSRR) versus frequency. When operating from noisy sources, improved supply-noise rejection and transient response can be achieved by increasing the values of the input and output bypass capacitors and through passive filtering techniques.Input-Output (Dropout) VoltageA regulator ’s minimum input-to-output voltage differen-tial (dropout voltage) determines the lowest usable sup-ply voltage at which the output is regulated. In battery-powered systems, this determines the useful end-of-life battery voltage. The MAX8887/MAX8888 use a P-channel MOSF ET pass transistor. Its dropout volt-age is a function of drain-to-source on-resistance (R DS(ON)) multiplied by the load current (see Typical Operating Characteristics ).V DROPOUT = V IN - V OUT = R DS(ON)✕I OUTChip InformationTRANSISTOR COUNT: 620PROCESS: BiCMOSMAX8887/MAX8888Low-Dropout, 300mA Linear Regulators in SOT23_______________________________________________________________________________________7Figure 1. Functional DiagramFigure 2. Power Operating Regions: Maximum Output Current vs. Input VoltageM A X 8887/M A X 8888Low-Dropout, 300mA Linear Regulators in SOT23Ma xim ca nnot a ssume responsibility for use of a ny circuitry other tha n circuitry entirely embodied in a Ma xim product. No circuit pa tent licenses a re implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.8_____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600©2000 Maxim Integrated ProductsPrinted USAis a registered trademark of Maxim Integrated Products.Package Information。
斯达森软起动器选型手册

对于大惯量 , 高静摩擦力的负载 , 如 : 满载的运输带、搅拌机等 , 可依据用户的要
求提供此种起动方式。
SEC18C 提供用户二种停车方式
自由停车
V
软停车 ( 电压斜坡停车 )
用户可通过控制面板选择停车方式。若选择软停车 ( 电压斜坡停车 ), 可设置相应停
车时间。
电流限幅软起动
t
电压斜坡软起动
工作高度
海拔 1000m 以内不降容 , 海拔 1000m 以上额定电流降低 1%/100m
冷却方式
自然风冷
5
型号说明
SEC18C
380V 起动器选型对照表 1
起动器型号
额定电流 (A)
额定电压,M6 表示 660V,M11 表示 1140V,无表示 380V 额定电流 如 017 表示 17A 斯达森软起动器产品系列
880
1200
1000
1500
1200
额定限制短路电 适配快速熔断器 可选外接电流互
流 (kA)
规格 (A)
感器规格
50
50
50
63
50
100
75A/5A
50
100
50
SEC18C 系列电子式软起动器是专门为三相异步电动机而设计的一种全数字智能化起动设备。它将微型计算机控制技术、数 字信号处理技术、晶闸管控制技术、数字通信技术综合应用于电动机起动和停止的控制当中 , 采用电流限幅和电压斜率上升的工 作原理 , 控制输出给电动机的电压 , 从而限制和减少了起动电流 , 不仅可以保障电机的安全可靠运行 , 而且还可以实现远程监控 与操作。
功能说明
SEC18C 提供用户三种起动方式
电流限幅软起动
CSC-187Z工业以太网交换机说明书-V1.01

我公司联系,我们将为您提供相应的服务。
技术支持
电话:010-62986668 传真:010-62981900
重要提示
感谢您使用北京四方继保自动化股份有限公司的产品。为了安全、 正确、高效地使用本装置,请您务必注意以下重要提示:
1) 本说明书仅适用于 CSC-187Z 工业以太网交换机。 2) 请仔细阅读本说明书,并按照说明书的规定调整、测试和操作。
第五篇 CLI 命令............................................ 54
1.常用命令....................................................... 54 2.端口配置....................................................... 58 3.配置 VLAN ......................................................61 4.配置环网....................................................... 62 5.配置 RSTP ......................................................63
如有随机资料,请以随机资料为准。 3) 为防止装置损坏,严禁带电插拔装置各插件、触摸印制电路板
SYNTEC参数说明手册
SYNTEC参数说明手册- 0 -新代科技参数设定说明手册by : 新代科技date : 2006/11/20ver : 9.5SYNTEC参数说明手册- 1 -版本更新记录项次更改内容纪录更改日期作者更改后版本01 初版定稿2005/05/25 吴达钦V9.002 增加Embedded参数设定,Pr221~P226轴型态修正2005/09/22 赖春亿V9.103 增加伺服轴设定及加减速设定参数说明2005/09/22 赖春亿V9.204 增加六轴卡(servo6)指拨开关说明2006/07/21 赖春亿V9.305 修正内容编排格式2006/09/05 赖春亿V9.406 增加参数总表2006/11/20 赖春亿V9.5SYNTEC参数说明手册- 2 -目录1.参数总表............................................................................................................................................ (7)2.参数设定说明............................................................................................................................................ .. (36)2.1系统基本参数设定............................................................................................................................................ (36)2.1.1硬体环境设定............................................................................................................................................ .. (36)2.1.1.1轴卡基本参数设定............................................................................................................................................ . (36)2.1.1.1.1 Pr01 轴板基址............................................................................................................................................ .. (36)2.1.1.1.2 Pr09 轴板型态............................................................................................................................................ .. (37)2.1.1.1.3 Pr10 伺服警报接点型态............................................................................................................................................ . (37)2.1.1.1.4 Pr11 轴卡时脉来源............................................................................................................................................ (38)2.1.1.1.5 Pr12 SERVO6轴卡最高时脉............................................................................................................................................ (38)2.1.1.1.6 Pr13 轴卡数目............................................................................................................................................ .. (38)2.1.1.2 I/O卡基本参数设定............................................................................................................................................ . (39)2.1.1.2.1 Pr03 I/O板基址............................................................................................................................................ . (39)2.1.1.2.2 Pr05 I/O板组态............................................................................................................................................ . (39)2.1.1.2.3 Pr15 I/O卡数位滤波程度............................................................................................................................................ (42)2.1.1.3 控制精度设定............................................................................................................................................ .. (43)2.1.1.3.1 Pr17控制精度............................................................................................................................................ (43)2.1.1.4 萤幕功能键型态设定............................................................................................................................................ .. 432.1.1.4.1 Pr3205功能键型态............................................................................................................................................ .. (43)2.1.1.5 萤幕型别............................................................................................................................................ . (44)2.1.1.5.1 Pr3211 萤幕型别............................................................................................................................................ .. (44)2.1.1.6预设外部存取资料磁碟机代号 (44)2.1.1.6.1 Pr3213 磁碟机代号............................................................................................................................................ .. (44)2.1.1.7 选择控制面板键盘型态..........................................................................................................................................442.1.1.7.1 Pr3217 选择控制面板键盘型别............................................................................................................................................442.1.1.8系统扫瞄时间设定............................................................................................................................................ . (45)2.1.1.8.1 Pr3202 I/O扫描时间............................................................................................................................................ (45)2.1.1.8.2 Pr3203 运动补间时间............................................................................................................................................ . (45)2.1.1.8.3 Pr3204 PLC扫描时间............................................................................................................................................ .. (45)2.1.2软体介面环境参数设定............................................................................................................................................ . (46)2.1.2.1应用功能参数设定............................................................................................................................................ . (46)2.1.2.1.1 Pr411 G00运动方式............................................................................................................................................ . (46)2.1.2.1.2 Pr413 G92(G92.1)座标保留模式设定 (46)2.1.2.1.3 Pr414 工件座标系统保留模式............................................................................................................................................46SYNTEC参数说明手册- 3 -2.1.2.1.4 Pr415 重置或关机时保留目前刀长资料 (47)2.1.2.1.5 Pr3207 C/S界面版本编号............................................................................................................................................ . (47)2.1.2.1.6 Pr3215选刀时呼叫副程式............................................................................................................................................ (47)2.1.2.1.7 Pr3241 工件程式小数点型态............................................................................................................................................2.1.2.1.8 Pr3243 键盘重置键由PLC处理...........................................................................................................................................482.1.2.1.9 Pr3245刀长磨耗补偿输入增量最大值 (48)2.1.2.1.10 Pr3801 G95时进给量与主轴位置紧密偶合 (48)2.1.2.1.11 Pr3807圆弧终点不在圆弧上检查视窗 (49)2.1.2.1.12 Pr3809 UVW为XYZ轴增量指令 (49)2.1.2.1.13 Pr3815 刀具半径补偿预看模式..........................................................................................................................................492.1.2.1.14 Pr3816 刀长补偿模式............................................................................................................................................ (49)2.1.2.1.15 Pr3819过切检查型态............................................................................................................................................ (50)2.1.2.1.16 Pr3851断刀处理程式号码............................................................................................................................................ . (50)2.1.2.2 系统人机介面设定............................................................................................................................................ (51)2.1.2.2.1 Pr3201 设定启动车床规则............................................................................................................................................ .. (51)2.1.2.2.2 Pr3209 语言设定............................................................................................................................................ .. (51)2.1.2.2.3 Pr3219 系统安装组态............................................................................................................................................ . (52)2.1.2.2.4 Pr3221 除错模式............................................................................................................................................ .. (52)2.1.2.2.5 Pr3223启动系统管理功能............................................................................................................................................ (53)2.1.2.2.6 Pr3225 萤幕保护功能延迟时间............................................................................................................................................2.1.2.2.7 Pr3227 萤幕解析度............................................................................................................................................ .. (53)2.1.2.2.8 Pr3229 关闭工件座标系统功能...........................................................................................................................................532.1.2.2.9 Pr3247 速率显示方法............................................................................................................................................ . (54)2.2.伺服轴向参数设定............................................................................................................................................ .. (55)2.2.1各轴对应机械轴设定............................................................................................................................................ .. (55)2.2.1.1 Pr21~Pr40 伺服对应的机械轴 (55)2.2.2 轴向马达运动方向的设定............................................................................................................................................552.2.2.1 Pr41~Pr60 马达运动方向设定 (55)2.2.3 轴向命令与回授解析度设定........................................................................................................................................562.2.3.1 Pr61~Pr80 位置感测器解析度 (56)Pr81~Pr100 轴卡回授倍频............................................................................................................................................ . (56)Pr121~Pr160 螺杆侧齿轮齿数,马达侧齿轮齿数 (56)Pr161~Pr180 螺杆宽度(Pitch)..................................................................................................................................... (56)Pr181~Pr200 伺服系统的位置回路增益 (56)Pr201~Pr220 位置感测器型态.............................................................................................................................................56Pr341~Pr360 位置命令倍率分子.........................................................................................................................................56Pr361~Pr380 位置命令倍率分母.........................................................................................................................................562.2.4 各轴向应用型态设定............................................................................................................................................ .. (58)SYNTEC参数说明手册- 4 -2.2.4.1 Pr221~Pr226轴型态............................................................................................................................................ . (58)2.2.4.2 Pr281~Pr300选择半径轴或直径轴 (59)2.2.5 各轴向显示名称设定............................................................................................................................................ .. (59)2.2.5.1 Pr321~Pr340设定轴的名称 (59)2.2.6 轴向控制模式设定............................................................................................................................................ (60)2.2.6.1 Pr381~Pr400位置伺服控制模式 (60)2.2.7 定位检查功能设定............................................................................................................................................ (60)2.2.7.1 Pr421~Pr440切削时位置检查的视窗范围 (60)2.2.7.2 Pr481~Pr500 快速移动(Rapid Travel, G00)时位置检查的视窗范围 (61)2.2.7.3 Pr561~Pr580 遗失位置检查视窗 (61)2.2.7.4 Pr901~Pr920 零速检查视窗 (61)2.2.8 各轴向左右软体行程极限保护 (61)2.2.8.1 Pr2401~Pr2440 软体第一行程保护的范围 (61)2.2.8.2 Pr2441~Pr2480 软体第二行程保护的范围 (62)2.3.主轴参数设定............................................................................................................................................ . (63)2.3.1主轴对应命令输出埠设定.............................................................................................................................................632.3.1.1 Pr1621~Pr1630 主轴对应的机械轴或逻辑轴 (63)2.3.2 主轴命令参数设定............................................................................................................................................ (63)2.3.2.1 Pr.1631~Pr.1636 主轴零速offset速度 (63)2.3.2.2 Pr.1641~Pr.1646 主轴编码器极性 (63)2.3.2.3 Pr.1651~Pr.1656 主轴马达编码器一转的Pulse 数 (63)2.3.2.4 Pr.1661~Pr.1666 主轴回授倍频 (64)2.3.2.5 Pr.1671~Pr.1676 主轴马达增益 (64)2.3.2.6 Pr.1681~Pr.1692 主轴第一档齿数比 (64)Pr.1901~Pr.1952 主轴第四档齿数比 (64)2.3.2.7 Pr.1711~Pr.1716 主轴是否安装编码器 (65)2.3.3 主轴运动转速设定参数............................................................................................................................................ . (65)2.3.3.1 Pr.1721~Pr.1726 主轴寸动速度 (65)2.3.3.2 Pr.1731~Pr.1736 主轴最低转速 (65)2.3.3.3 Pr.1801~Pr.1806 主轴最高转速 (65)2.3.3.4 Pr.1821~Pr.1826 主轴伺服微分增益 (65)2.3.3.5 Pr.1831~Pr.1836 主轴加减速时间 (66)2.3.3.6 Pr.1851~Pr.1856 主轴重力加速度加减速时间 (66)2.3.4主轴定位设定参数............................................................................................................................................ (66)2.3.4.1 Pr.1741~Pr.1746 主轴定位速度 (66)2.3.4.2 Pr.1741~Pr.1746 主轴定位偏移量 (66)2.3.4.3 Pr.1771~Pr.1776 主轴原点偏移量 (66)2.3.4.4 Pr.1781~Pr.1786 主轴定位最低速度 (67)SYNTEC参数说明手册- 5 -2.3.4.5 Pr.1791~Pr.1796 主轴马达型态 (67)2.3.4.6 Pr.1811~Pr.1816 主轴编码器安装位置 (67)2.3.4.7 Pr.1841~Pr.1846 主轴Y-Delta切换速度 (67)2.4.轴向运动特性设定参数............................................................................................................................................ (69)2.4.1 切削时前加减速运动规划............................................................................................................................................692.4.1.1 Pr401 切削加减速时间........................................................................................................................................69Pr402 重力加速度加减速时间...........................................................................................................................................69Pr405 切削的最高进给速度............................................................................................................................................ (69)Pr541~Pr560 各轴切削的加减速时间 (69)Pr621~Pr640 各轴切削的最高进给速度 (69)Pr641~Pr660 各轴重力加速度加减速时间 (69)2.4.2 切削时后加减速运动规划............................................................................................................................................712.4.2.1 Pr404后加减速切削钟型加减速时间 (71)2.4.3 切削时直线转角自动减速功能 (73)2.4.3.1 Pr406转角参考速度............................................................................................................................................ . (73)2.4.4 切削时圆弧切削运动最高进给速度设定 (74)2.4.4.1 Pr408 半径5mm圆弧切削参考速度 (74)2.4.5 快速移动及JOG时的加减速规划 (75)2.4.5.1 Pr441~Pr460 各轴快速移动(G00)的加减速时间 (75)Pr461~Pr480 各轴快速移动(G00)的最高进给速度 (75)Pr501~Pr520 各轴快速移动(G00)的F0速度 (75)Pr521~Pr540 各轴JOG速度.............................................................................................................................................752.5.寻原点动作设定参数............................................................................................................................................ . (76)2.5.1寻原点方式设定参数............................................................................................................................................ .. (76)2.5.1.1 Pr961~Pr980 各轴寻原点方法 (76)2.5.2 寻原点动作规格与参数设定........................................................................................................................................762.5.2.1 Pr821~Pr840 各轴第一段寻原点速度 (76)Pr841~Pr860 各轴第二段寻原点速度 (76)Pr861~Pr880 各轴寻原点为负方向 (76)2.5.3 原点偏移功能设定参数............................................................................................................................................ . (77)2.5.3.1 Pr881~Pr900 原点的偏移量设定 (77)2.5.4 原点栅格量功能设定参数............................................................................................................................................782.5.4.1 Pr941~Pr960启动寻原点栅格功能 (78)2.6.手轮功能设定参数............................................................................................................................................ (80)2.6.1手轮讯号输入设定参数............................................................................................................................................ . (80)2.6.1.1 Pr2031~Pr2034 手轮对应的机械轴 (80)SYNTEC参数说明手册- 6 -2.6.2手轮讯号解析度设定参数.............................................................................................................................................802.6.2.1 Pr2041~Pr2044 手轮Encoder一转的Pulse 数 (80)Pr2051~Pr2054 手轮回授倍频...........................................................................................................................................802.6.3手轮段数设定参数............................................................................................................................................ (80)2.6.3.1 Pr2001手轮第四段倍率设定 (80)2.6.4手轮模拟功能设定参数............................................................................................................................................ . (81)2.6.4.1 Pr2003手轮模拟对应手轮号码 (81)2.6.5手轮驱动轴向功能设定参数.........................................................................................................................................812.6.5.1 Pr2031~Pr2033手轮对应的座标轴 (81)2.6.5手轮设定参数............................................................................................................................................ .. (81)2.6.5.1 Pr2031~Pr2033手轮对应的座标轴 (81)2.7.机构补偿功能设定参数............................................................................................................................................ (82)2.7.1尖角误差补偿设定参数............................................................................................................................................ . (82)2.7.1.1 Pr1361~Pr1380圆弧尖角正向误差补偿量 (82)Pr1381~Pr1400圆弧尖角误差补偿时间常数 (82)Pr1361~Pr1400圆弧尖角负向误差补偿量 (82)2.8.轴耦合功能设定参数............................................................................................................................................ . (85)2.8.1轴耦合功能设定参数............................................................................................................................................ .. (85)2.8.1.1 Pr1361~Pr1380圆弧尖角正向误差补偿量 (85)Pr1381~Pr1400圆弧尖角误差补偿时间常数 (85)Pr1361~Pr1400圆弧尖角负向误差补偿量 (85)SYNTEC参数说明手册- 7 -1.参数总表编号说明输入范围单位使用详细说明1 *第一轴轴板基址[0,65535] SERVO 4:ㄧ片或两片轴卡,第一片轴卡位置请设定800(320H).三片或四片轴卡,第一片轴卡位置请设定768(300H)SERVO6:请设定768(300H).ㄧ体机(Embedded):请设定512(200H).内定值800 (320H)3 *第一片IO板基址[0,65535] 第一片I/O卡位置设定,内定值512(200H)5 *IO板组态[0,9] 0:2PIO4+1PIO3(R1+HK)1: HK + 3R12: HK + R2 + 2R13: 2R2 + 4R14: HK2 + R2 + 2R15: HK + R2 + 4PIO46:PIO5 (不启动点矩阵扫描功能)7:PIO5(启动点矩阵扫描控制操作面板)9:虚拟IO卡9 *轴板型态[0,9] 0:EMP21:SERVO4+不检查伺服警报2:SVO4+伺服警报接点为常开接点Normal Open ( A 接点)3:SERVO4+伺服警报接点为常闭接点Normal Close ( B 接点)4:EMP45:SERVO69:虚拟轴卡SYNTEC参数说明手册- 8 -编号说明输入范围单位使用详细说明10 *伺服警报接点型态[0,1] 0:常开接点Normal Open (A接点) 1:常闭接点Normal Close(B接点)注:此参数仅对SERVO 6轴卡有效11 *轴板时脉来源[0,2] 设定轴板时脉来源:0时使用轴板自已时脉.1时共用IPC Bus时脉(486).2时共用IPC Bus时脉(586+).13 *轴板数目[0,6] 设定轴板个数15 设定I/O板数位滤波程度[0,3] 数值越大滤波效果越大,但反应灵敏度变弱.数值越小滤波效果越小,但反应灵敏度变快.17 *控制精度(1:条;2:微米;3:次微米)[1,3] 设定控制精度,基本长度单位长度单位, BLU, 此单位不会受公英制输入模式影响.1: 0.01 mm,0.01 deg,0.001 inch;2: 0.001 mm,0.001 deg,0.0001 inch;3: 0.0001 mm,0.0001 deg0.00001 inch;当此值改变时,所有有关BLU的长度单位参数必需重设,同时,刀具资料也必须重设.21~40 *对应的机械轴[0,20] 依配机规划,可指定各轴相对轴卡上的伺服机械轴输出埠编号41~60 马达运动方向反向[0,1] 设定各轴机台实际运动方向, 0:不反向,1:反向61~80 位置感测器解析度(编码器:Pulse/转;光学尺:Pulse/mm)[100,2500000]pulse/revpulse/mm各轴马达ENCODER每转PULSE 数81~100 轴卡回授倍频[1,4] 轴卡ENCODER倍频数设定, 全部设定4101~120 马达的增益[1,8000] RPM/V 马达指令增益亦即1V 的速度指令,相对马达转速是几转(rpm)SYNTEC参数说明手册- 9 -编号说明输入范围单位使用详细说明注:电压控制模式时有效121~160 螺杆侧齿轮齿数马达侧齿轮齿数[1,999999999]齿轮比设定,输入实际马达端的齿数,与螺杆端齿数161~180 螺牙宽度(Pitch) [1,1000000] BLU 螺杆的导程,螺杆每一转前进的牙距181~200 伺服系统的位置回路增益(Loop Gain)[1,3000] 1/sec 系统的刚性设定,增益值设定越大,系统刚性越好,加工精度越佳,但是设定太大,容易引起机台抖动,通常CNC 系统, 编码器场合设定30 ,光学尺场合,设定20201~220 位置感测器型别(0:编码器;1:光学尺;2:无回授)[0,2] 位置检测元件的类别设定(光学尺,编码器或无回授)221~240 轴的型态[0,5] 设定轴的型态(0:线性轴;1-5:旋转轴型态A-E)241~260 *双回授第二位置感测器对应的机械轴[0,20] 设定双回授中第二位置感测器(光学尺)对应轴卡上的机械轴261~280 双回授第二位置感测器解析度(Pulse/mm)[100,2500000]pulse/mm 双回授第二位置感测器解析度.直线轴:每毫米,mm,的脉波数,即A/B相的频率.旋转轴:一圈,360度,的脉波数,即A/B相的频率.281~300 选择半径轴或直径轴[0,1] 设定该轴为直径轴或半径轴:0:为半径轴;1为直径轴,当此参数变动后,该轴的下列参数也必须是直径量:1.原点偏移量2.参考点3.软体行程极限301~320 双回授第二位置感测器回授倍频[1,4] 双回授第二位置感测器卡ENCODER或光学尺倍频数设定,全部设定4321~340 设定轴的名称[00100,10999] 设定轴的名称,前两位数字决定是否显示轴向代号.00=>显示SYNTEC参数说明手册- 10 -编号说明输入范围单位使用详细说明10=>不显示第三码为英文字母代号的选择;其编码如下:X轴=>1;Y轴=>2;Z轴=>3;A轴=>4;B轴=>5;C轴=>6;U轴=>7V轴=>8W轴=>9后两位为下标号码.例如:X2设定值为102,W23设定值为923X设定为100341~360 位置命令倍率分子[1,999999999] 输出位置命令倍率的分子值361~380 位置命令倍率分母[1,999999999] 输出位置命令倍率的分母值381~400 位置伺服控制模式[0,2] 0: CW/CCW位置伺服控制模式.1: 电压位置伺服控制模式.2: A/B Phase位置伺服控制模式.SYNTEC参数说明手册- 11 -编号说明输入范围单位使用详细说明401 切削的加减速时间[0,60000] ms 8.00版(含之前)使用说明:G01,G02,G03,G33的加减速时间设定,此时间设定越大,加减速时间越长,运动越平顺9.00,10.00版使用说明:设定切削的加减速时间(G01/G02/G03/G31).此参数会与参数405切削的最高进给速度,一起用来计算切削时的合成最高加速度,以供切削时加减速依据.建议设定:每1 m/min的切削速度加减速时间10ms,例参数405设定为6000 (6 m/min) 时,此参数就设60(60ms).402 重力加速度加减速时间[0,60000] ms 设定重力加速度加减速时间.这个参数用来限制动程的冲量(Jerk)最大值.(建议Jmax=65333 mm/sec3)9.00版使用说明:Jmax=Pr405*1000000/(Pr401*Pr402*60)(mm/sec3)10.00版使用说明:Jmax=1G*1000/Pr402(mm/sec3)1G=9800 m/sec2404 后加减速时间[0,60000] ms 切削后加减速时间.提供线性后加减速的方式,平滑马达输出指令,以达到加减速的效果,建议值15ms~25ms405 切削的最高进给速度[0,3600000] mm/mindeg/min01. in/min加工(G01/G02/G03/G31/G33)最高速度设定406 设定转角参考速度[6,3600000] mm/mindeg/min01. in/min设定转角参考速度,此参考速度为转角90度时,允许的角隅最高速度值.此速度越大时加工越快,但角隅精度差,此速度越大加工越SYNTEC参数说明手册- 12 -编号说明输入范围单位使用详细说明慢,但角隅精度好.建议值500mm/min.408 设定半径5mm圆弧切削参考速度[6,3600000] mm/mindeg/min01. in/min由於圆弧切削时,伺服落后会造成圆半径内缩,其中,T为伺服系统时间常数;V为切线速度;R为圆半径.因此,我们利用此关系式,在内缩量保持固定与伺服特性固定的条件下,找出任何圆半径的最高允许速度.此参数即在设定此参考半径Rref,参数408用来设定参考速度Vref.建议值Rref = 5000 (5mm), Vref=500 (mm/min).409 螺纹切削加减速时间[0,60000] ms G33螺纹切削加减速时间410 手轮加减速时间[10,60000] ms 设定手轮加减速时间,内定值200 411 G00运动方式[0,1] 0:线性同动;1:各轴独立以各轴最高速移动.413 G92(G92.1)座标保留模式设定[0.,2] 0:重置时(Reset)不保留由G92(G92.1)设定的工作座标偏移量1:重置时(Reset) 保留由G92(G92.1)设定的工作座标偏移量,开关机不保留2: 重置时(Reset)与开关机保留由G92(G92.1)设定的工作座标偏移量414 工作座标系统座标保留模式设定[0,2] 0:重置时(Reset)回归内定工件座标系统(G54)1:重置时(Reset)保留当时工件座标系统2:重置时(Reset)与开关机保留当时工件座标系统415 *在重置(Reset)或关[0,1] 0: 在重置(Reset)或关机(Power SYNTEC参数说明手册- 13 -编号说明输入范围单位使用详细说明机(Power OFF)时目前刀子的刀长资料是否保留OFF)时不保留目前刀子的刀长资料1:在重置(Reset)或关机(PowerOFF)时保留目前刀子的刀长资料417 刚性攻牙速度回路增益[0,4000] 用来调整Z轴追随主轴在等速段的强度,此值越小Z 轴落后主轴越多,此值越大,Z轴落后越小,当此值太大,会造成超前,或摆动现象.418 刚性攻牙加速度回路增益[0,4000] 用来调整Z轴追随主轴在加速段的强度,此值越小Z 轴落后主轴越多,此值越大,Z轴落后越小,当此值太大,会造成超前,或摆动现象419 刚性攻牙主轴减速时间[0,60000] ms 刚性攻牙主轴减速时间,用来调整攻牙过切深度.421~440 切削时位置检查(In-Position)的视窗范围[0,300000] BLU BLOCK 的执行,以确定加工精度,但是设定太小,可能会影响加工速度441~460 快速移动(RapidTravel, G00)加减速时间[0,60000] ms G00,Home 与JOG 的加减速时间设定,建议值: G01 加减速速度一倍以上461~480 快速移动(RapidTravel, G00)进给速度[0,3600000] mm/mindeg/min0.1 in/minG00 的速度设定,此速度接受面板RAPID OVERRIDE 设定(F0,25,50,100)481~500 快速移动(RapidTravel, G00)时位置检查(In-Position)的视窗范围[0,300000] BLU G00 IN POSITION CHECK 的范围501~520 快速移动(RapidTravel, G00) F0速度值[0,15000] mm/mindeg/min0.1 in/minG00 RAPID OVERRIDE 设定为F0 时,机台运动速度521~540 JOG速度[0,3600000] mm/mindeg/min0.1 in/min各轴JOG 速度设定,接受面板旋钮的OVERIRDE541~560 各轴切削加减速时[0,60000] ms 8.00版(含之前)使用说明: SYNTEC参数说明手册- 14 -编号说明输入范围单位使用详细说明间PLC轴G01, G02, G03, G33 的加减速时间设定,此时间设定越大,加减速时间越长,运动越平顺,但是太大会影响到加工精度.9.00,10.00版使用说明:设定切削的加减速时间(G01/G02/G03/G31).此参数会与参数621~640各轴切削的最高进给速度,一起用来计算切削时的合成最高加速度,以供切削时加减速依据.建议设定每1 m/min的切削速度加减速时间10ms,例参数621设定为6000 (6 m/min) 时,此参数541就设60(60ms).561~580 遗失位置检查视窗[50,300000] BLU 控制器在马达静止的情况下,会自动检查马达回授位置与命令差是否超过此参数设定的范围,如果是就会发出遗失位置命令警报581~600 速度前馈补偿百分比[0,200]601~620 各轴转角参考速度[6,3600000] mm/mindeg/min01. in/min设定各轴转角参考速度,此参考速度为转角90度时,允许的角隅最高速度值.此速度越大时加工越快,但角隅精度差,此速度越大加工越慢,但角隅精度好.建议值500 mm/min.621~640 各轴切削的最高进给速度[0,3600000] mm/mindeg/min01. in/min加工(G01,G02,G03)最高速度设定641~660 各轴重力加速度加减速时间[0,60000] ms 设定各轴重力加速度加减速时间.这个参数用来限制动程的冲量(Jerk)最大值.Jmax=1G*1000/T1G=9.8 m/sec2T为此参数所设定的值PS:此参数对G00,G01,JOG,Home的轴向移动均有效SYNTEC参数说明手册- 15 -编号说明输入范围单位使用详细说明701~720 所属轴群代号[1,15] 本轴附属轴群.有关轴群的PLC 控制介面,请参考R520~R559.Bit 0 此轴属第一轴群Bit 1 此轴属第二轴群Bit 2 此轴属第三轴群Bit 3 此轴属第四轴群例如:设定1此轴属第一轴群;设定2此轴属第二轴群;设定3此轴属第一轴群,也属於第二轴群;设定15此轴属第一至四轴群.721~724 轴群对应的MST通道[1,4] 设定轴群使用的MST通道代号.目前系统提供多组独立的MST通道可进行CNC与PLC沟通.不同轴群可共用同一个通道,当使用共用通道,如发生同时来自不同轴群的MST要求时,其要求将依序通知PLC处理,会稍微影响效能,但PLC程式撰写较简单.第一组的PLC介面由C38/S30/S29/S54/S69 R1~R3构成第二~四组的PLC介面请参考R615~R626731 CNC主系统轴群[1,4] 指定CNC主系统包含的轴群数目.超过此参数的轴群,可由PLC直接驱动.有关轴群的PLC控制介面,请参考R520~R559.内定值2.例:设为2时:表示第一和第二轴群由CNC主系统控制($1,$2),第三和第四轴群由PLC控制.设为3时:表示第一,二,和第三轴群由CNCSYNTEC参数说明手册- 16 -编号说明输入范围单位使用详细说明主系统控制($1,$2,$3),第四轴群由PLC控制.~800 系统保留区保留803 *Home Dog来源(0:I/O; 1:轴卡)[0,1] HOME DOG 是由I/O 卡来,还是轴卡,建议由I/O 卡来注:此参数仅对EMP4卡有效821~840 寻原点速度[0,3600000] mm/min deg/min0.1 in/min寻原点时,轴向寻找HomeDOG的速度设定,试机时,先设定1mm/min ,没有问题后,再将速度调高到目标值841~860 寻原点的第二段的低速速度[0,3600000] mm/mindeg/min01 in/min轴向在找到HomeDOG后往回寻找马达INDEX的速度设定,试机时,先设定1 mm/min ,没有问题后,再将速度调高到目标值861~880 寻原点方向为负方向[0,1] 寻HOME 方向设定,0 为正, 1为负881~900 寻原点的偏移量[-999999999,+999999999]BLU 系统在找到马达INDEX后,会将机械座标零点从马达INDEX位置偏移到参数指定距离的位置上,这个参数通常用於将机台座标设定为单向范围901~920 零速检查视窗(count)[3,50] count 各轴零速检查视窗,当0.1sec内绝对位置纪录器变化量小於设定值时被视为零速度921~940 Home Dog极性(0:正;1:负)[0,1] HOME DOG 极性设定,正常配线是NORMAL CLOSE ,但是在进接开关使用场合是NORMALOPEN注:此参数仅对EMP4卡有效941~960 启动寻原点栅格功能[0,1] 当Home Dog位置太靠近马达索引讯号时,容易因HomeDog反应异常造成寻原点不准.当装好HomeDog后发现栅格量不为20~80,请打开此功能.此功能打开后,寻原点时会自动忽略离开HomeDog后半圈的索引讯号.SYNTEC参数说明手册- 17 -编号说明输入范围单位使用详细说明961~980 设X 轴寻原点方法[0,2] 0:有DOG开关;1:编码器索引2.有DOG开关,对原点偏移量的处理,采直接设定机械座标方式,而非位移.~1200 系统保留保留1221~1240 启动背隙补偿功能[0,1] 背隙补偿功能起动,关闭,进行背隙量测时,需将此功能先关掉1241~1260 背隙补偿量[0,999999999]BLU 背隙补偿功能起动后,以此设定量,进行背隙补偿1301~1320 启动齿节误差补偿功能[0,2] 节距补偿功能起动/关闭,进行节距补偿量测时,需先起动背隙补偿功能,0 : 不补偿,1: 单向补偿,2: 双向补偿1321~1340 齿节误差补偿间隔[1000,99999999]BLU 节距补偿功能起动后,以此设定量,设定补偿间距,每格的间距是多少1341~1360 原点在补偿表格的位置[1~100] 节距补偿功能起动,机械原点在补偿表的第几号,建议值是50。
KODEN MDC-1860 1810 1820 18英寸平面雷达系统说明书

FEATURES• An 18-inch flat screen radar from KODEN!• Best suited for ocean going mid-size vessel.• Select from 6 kW, 12 kW or 25 kW power output, 4 ft or 6 ft type aerial.MDC-1860: 4 ft / 6 ft, 6 kW, Open Antenna MDC-1810: 4 ft / 6 ft, 12 kW, Open Antenna MDC-1820: 4 ft / 6 ft, 25 kW, Open Antenna• Flat screenA non-reflection, 18-inch high-resolution flat panel display provid es a flicker free non-fad ing picture, minimizing operator’s eye fatigue. The display color can be changed for daytime or nighttime operation.• Hands-free operationNewly developed auto tuning and video processing system sets the operator free from cumbersome adjustments such as setting up tuning, STC, gain, etc. With a hands free operation the navigator can concentrate on other tasks on the bridge.• High definition pictureHigh definition is available even on the short-range scales,1/2 NM down to 1/8 NM. This is a powerful feature for harbor and docking operations.• Collision assessmentUsing the built-in EPA (Electronic Plotting Aid) function other ship’s movement is displayed in vector form. This feature provides a direct and logical assessment of collision risk and urges the operator to take early maneuvering opera-tions.• Picture offset to any pointThe picture can be offset to any point within 2/3 of the screen radius to gain more viewing range.• Map functionsArtificial lines and marks can be created and overlaid on the radar screen to represent coastlines, boundaries, etc.• Alarm zoneA fan-shaped zone is created to monitor and alert the operator that ships are coming in and leaving a specified area. This feature becomes part of the ATA (Automatic Tracking Aid)functions when the optional ATA module is fitted.• Monitor display (Option)An external monitor display can be fitted on request, providing multiple radar operations from different stations on board the ship, one on the bridge the other in the captain’s cabin for instance.• Analog RGB outputRadar picture can be supplied to an external monitor or a VDR (Voyage Data Recorder) through the connector at the display’s rear panel.• Serial interfaceThe IEC 61162-1 serial interface is fitted to connect external navigation devices to display navigational information such as ship’s position, speed, course, etc.• Tracking data outputWith the ATA module installed, all tracked ship’s data can beoutput to an external device such as an electronic plotter unit.18-inch Color LCDMarine RadarAntenna unitOptional itemsMDC-1860MDC-1810MDC-1820Aerial length4 feet / 6 feet Peak power output 6 kW 12 kW 25 kWFrequency9410 ± 30 MHz Beam width Horizontal1.8°/1.2°Vertical22°Side lobes Within ± 10°Better than -23 dB Outside ± 10°Better than -30 dB Rotation 24 rpmTransmission 6 kW / 12 kW 25 kWpulse S (Short pulse)0.08 µs / 4000 Hz 0.08 µs / 2000 Hz width M1 (Medium 1 pulse)0.25 µs / 2000 Hz 0.3 µs / 1300 Hz M2 (Medium 2 pulse)0.5 µs / 1000 Hz 0.6 µs / 800 Hz L (Long pulse)1.0 µs / 500 Hz 1.2 µs / 500 Hz, 400 Hz(96 nm)IF center frequency 60 MHzIF bandwidth 15 MHz (S, M1) / 3 MHz (M2, L)Noise figureBetter than 6 dB Operation in wind 100 knots as relative Water proofing gradeIPX6 (IEC 60529)Display unitDisplay device 18 inch high resolution color LCDEffective diameter 269 mmResolution 1280 x 1024 pixels Video level8 levelsPresentation modes Head-up, North-up*, Course-up* and True motion*Range scales (nm)1/8, 1/4, 1/2, 3/4, 1.5, 3, 6, 12, 24, 48, 64, 72(12 kW), 96(25 kW)Rings interval (nm)1/16, 1/16, 1/8, 1/4, 1/2, 1, 2, 4, 8, 12(12 kW), 16(25 kW)Off-centeringSweep origin can be moved to any point within 2/3 of the screen radius.Trail display interval Every scan, 15 sec, 30 sec, 1 min, 3 min, 6 min, 12 min and OFF Alarm Entry alarm [alarm range (Minimum 0.5 nm), depth and bearing can be varied]EPAUp to 10 targets can be plotted, 5 points for one target eachATA (Option)Display of acquired/track data of up to 10 targets and Guard Zone are available. Display of guard zone is also available (any alarm range,width and bearing can be set).Data available for EPA Speed, course, CPA, TCPA, distance, bearing and age (time elapsed and ATA since the first plot, applicable to EPA only).Minimum detectable range 20 meters at 1/8 nm range Range resolution 20 meters at 1/8 nm range Range data accuracy 7 meters or 1% of the range scale selected, whichever is the greater.Bearing data accuracy ±1° maximumNavigation data display Data of own ship’s position (latitude/longitude)Input data format IEC 61162-1 / NMEA 0183 ver. 2.3 (BWC, GGA, GLC, GLL, HDT,RMB, RTE, VBW, VDR, VHW, VTG, WPL)Power supply 21.6 VDC to 41.6 VDC (24 V / 32 V, -10%, +30%)Power consumption 170 W nominal at 24 VDC inputAntenna Aerial RW701A-044 feet unitRW701A-066 feet Transceiver RB717A6 kW RB718A 12 kW RB719A25 kWDisplay unit MRD-100Operation unit MRO-100Connecting cable 242J159098B 15 m (49 3/16 ft) with connectors on both ends DC power cable CW-256-2M 3 m (16 3/8 ft) with 5-pin connector one end Spare parts kit MRD-100.SP Installation material M12-BOLT.KITFor antenna unit MRD-100.KITFor display unitOperation manual MDC-1800SER.OM.EStandard equipment07.12 Printed in JapanSafetyprecaution T o ensure proper and safe use of the equipment, please carefully read and follow the instructions in the Operation Manual.Tamagawa Office:2-13-24 Tamagawa, Ota-ku, Tokyo, 146-0095 Japan Tel: +81-3-3756-6501 Fax: +81-3-3756-6509Uenohara Office:5278 Uenohara, Uenohara-shi, Yamanashi, 409-0112 Japan Tel: +81-554-20-5860 Fax: +81-554-20-5875• Design and specifications are subject to change without notice.For details, please contact:www.koden-electronics.co.jp*****************************.jpATAMRE-300Auto MRE-330ManualGyro interface KSA-08A Built into display unit AIS interface AIS-100Built into display unitNavigator connecting cable CW-376-5M With 6-pin connector one end flying leads other end Power Rectifier PS-010With 2 spare fuses (5 A)AC power cable VV-2D8-3M Flying leads on both endsConnecting cable 242J159098C-20M 20 m with connector attached on both ends in extra length 242J159098D-30M30 m with connector attached on both ends*Requires heading, speed, and/or position signal input from external equipment including GPS Compass depending on application of user.ATA module MRE-300 (Option)Acquisition Manual TrackingAutomaticNumber of targets tracked Up to 10 targetsNumerical data output Distance, bearing, speed, course, CPA and TCPA AlarmCollision alarm and lost alarmOn screen display Symbols (acquired target, tracked target, target with data display and lost target), target number and vectors.Display modeRelative True Tracking distance range Up to 40.0 nmATA data outputTo be taken via the DATA 1 connector on the display rear panel.Signal level: RS422, Data format: IEC 61162-1Environmental conditionsAntennaDisplayOperating temperature -25°C to +55°C -15°C to +55°CStorage temperature +70°CHumidity93 % ± 3 % at +40°CFor selecting cable, contact your authorized Koden agent.Solid lines: Standard devices and connections.Dashed lines: Optional devices and connections.CW373/376Antenna unit Display unit Operation unitPower rectifier PS-01088 to 121 VAC 176 to 242 VAC10.8 to 41.6 VDC (RB717A/718A)21.6 to 41.6 VDC (RB719A)ATA MRE-300/330(Built into Display unit)Gyro/Log interfaceKSA-08A(Built into Display unit)Navigator Gyro compass Speed log。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
−40°C to +85°C
Note 1: Absolute maximum ratings are DC values beyond which the device may be damaged or have its useful life impaired. The datasheet specifications should be met, without exception, to ensure that the system design is reliable over its power supply, temperature, and output/input loading variables. Fairchild does not recommend operation outside datasheet specifications.
H = HIGH Logic Level L = LOW Logic Level Z = 3-STATE
Output A L H L H Y0 L H Z Z Y1 Z Z L H
Pin One Orientation Diagram
AAA = Product Code Top Mark - see ordering code Note: Orientation of Top Mark determines Pin One location. Read the top product code mark left to right, Pin One is the lower left pin (see diagram).
元器件交易网
NC7SZ18 TinyLogic UHS 1-of-2 Non-Inverting Demultiplexer with 3-STATE Deselected Output
September 1999 Revised May 2003
NC7SZ18 TinyLogic UHS 1-of-2 Non-Inverting Demultiplexer with 3-STATE Deselected Output
Features
s Space saving SC70 6-lead surface mount package s Ultra small MicroPak leadless package s High Impedance output when deselected s Ultra High Speed: tPD 2.5 ns Typ into 50 pF at 5V VCC s Broad VCC Operating Range; 1.65V to 5.5V s Power down high impedance inputs/outputs s Overvoltage tolerant inputs facilitate 5V to 3V translation s Patented noise/EMI reduction circuitry implemented
DC Electrical Characteristics
Symbol VIH VIL VOH Parameter HIGH Level Input Voltage LOW Level Input Voltage HIGH Level Output Voltage VCC (V) 1.65 − 1.95 2.3 − 5.5 1.65 − 1.95 2.3 − 5.5 1.65 2.3 3.0 4.5 1.65 2.3 3.0 3.0 4.5 VOL LOW Level Output Voltage 1.65 2.3 3.0 4.5 1.65 2.3 3.0 3.0 4.5 IIN IOZ IOFF ICC Input Leakage Current 3-STATE Output Leakage Power Off Leakage Current Quiescent Supply Current 0 to 5.5 1.65 to 5.5V 0.0 1.8 to 5.5 1.55 2.2 2.9 4.4 1.29 1.9 2.4 2.3 3.8 1.65 2.3 3.0 4.5 1.52 2.15 2.80 3.68 4.20 0.0 0.0 0.0 0.0 0.08 0.10 0.15 0.22 0.22 0.10 0.10 0.10 0.10 0.24 0.3 0.4 0.55 0.55 ±0.1 ±0.5 1 1 Min 0.75 VCC 0.7 VCC 0.25 VCC 0.3 VCC 1.55 2.2 2.9 4.4 1.29 1.9 2.4 2.3 3.8 0.10 0.10 0.10 0.10 0.24 0.3 0.4 0.55 0.55 ±1 ±5 10 10 µA µA µA µA V VIN = VIL IOL = 4 mA IOL = 8 mA IOL = 16 mA IOL = 24 mA IOL = 32 mA VIN = 5.5V, GND VIN = VIL or VIH 0 < VOUT ≤ 5.5V VIN or VOUT = 5.5V VIN = 5.5V, GND IOL = 100 µA V VIN = VIH IOH = −4 mA IOH = −8 mA IOH = −16 mA IOH = −24 mA IOH = −32 mA IOH = −100 µA TA = +25°C Typ Max TA = −40°C to +85°C Min 0.75 VCC 0.7 VCC 0.25 VCC 0.3 VCC Max Units V V Conditions
© 2003 Fairchild Semiconductor Corporation
DS500322
元器件交易网
NC7SZ18
Absolute Maximum Ratings(Note 1)
Supply Voltage (VCC ) DC Input Voltage (VIN) DC Output Voltage (VOUT) DC Input Diode Current (IIK) @ VIN ≤ −0.5V DC Output Diode Current (IOK) @ VIN ≤ −0.5V DC Output Current (IOUT) DC VCC or Ground Current (ICC/IGND) Storage Temperature Range (TSTG) Junction Temperature under Bias (TJ) Junction Lead Temperature (TL) (Soldering, 10 seconds) Power Dissipation (PD) @ +85°C 260 °C 180 mW
−0.5V to +7.0V −0.5V to +7.0V −0.5V to +7.0V −50 mA −50 mA ±50 mA ±100 mA −65°C to +150 °C
150 °C
Recommply Voltage Operating (VCC) Supply Voltage Data Retention (VCC) Input Voltage (VIN) Output Voltage (VOUT) Operating Temperature (TA) Input Rise and Fall Time (tr, tf) VCC @ 1.8V ± 0.15V, 2.5V ± 0.2V VCC @ 3.3V ± 0.3V VCC @ 5.0V ± 0.5V Thermal Resistance (θJA) 0 ns/V to 20 ns/V 0 ns/V to 10 ns/V 0 ns/V to 5 ns/V 350°C/W 1.65V to 5.5V 1.5V to 5.5V 0V to 5.5V 0V to VCC
Ordering Code:
Order Number NC7SZ18P6X NC7SZ18L6X Package Number MAA06A MAC06A Product Code Top Mark Z18 D5 Package Description 6-Lead SC70, EIAJ SC88, 1.25mm Wide 6-Lead MicroPak, 1.0mm Wide Supplied As 3k Units on Tape and Reel 5k Units on Tape and Reel
Pad Assignments for MicroPak
(Top Thru View)
TinyLogic is a registered trademark of Fairchild Semiconductor Corporation. MicroPak is a trademark of Fairchild Semiconductor Corporation.
Pin Descriptions
Pin Names A S Y0, Y1 Description Data Input Demultiplexer Select Outputs
Connection Diagrams
Pin Assignments for SC70
Function Table
Input S L L H H
2
元器件交易网
NC7SZ18
AC Electrical Characteristics
Symbol tPLH tPHL Parameter Propagation Delay A to Y0 or Y1 VCC (V) 1.8 ± 0.15 2.5 ± 0.2 3.3 ± 0.3 5.0 ± 0.5 tPLH tPHL tPZL tPZH Propagation Delay A to Y0 or Y1 Output Enable Time 3.3 ± 0.3 5.0 ± 0.5 1.8 ± 0.15 2.5 ± 0.2 3.3 ± 0.3 5.0 ± 0.5 tPLZ tPHZ Output Disable Time 1.8 ± 0.15 2.5 ± 0.2 3.3 ± 0.3 5.0 ± 0.5 CIN COUT CPD Input Capacitance Output Capacitance Power Dissipation Capacitance OPEN 3.3V 3.3 5.0 Min 2.0 1.0 0.8 0.5 1.2 0.8 3.0 1.8 1.2 0.8 2.5 1.5 0.8 0.3 TA = +25°C Typ 6.3 3.6 2.7 2.0 3.4 2.5 6.9 4.2 3.2 2.5 6.0 4.0 2.9 1.8 2.5 4.0 16 19.5 Max 10.1 5.7 4.0 3.1 4.9 3.9 12.0 6.8 5.0 4.0 10.0 6.8 4.9 3.5 TA = −40°C to +85°C Min 2.0 1.0 0.8 0.5 1.2 0.8 3.0 1.8 1.2 0.8 2.5 1.5 0.8 0.3 Max 10.5 6.0 4.3 3.3 5.4 4.2 12.5 7.3 5.5 4.3 10.5 7.1 5.3 3.7 ns ns ns CL = 50 pF, RL = 500Ω S1 = OPEN CL = 50 pF RD, RU = 500Ω S1 = GND for tPZH S1 = VIN for tPZL VI = 2 x VCC CL = 50 pF RD, RU = 500Ω S1 = GND for tPHZ S1 = VIN for tPLZ VI = 2 x VCC pF pF (Note 2) Figure 2 Figures 1, 3 Figures 1, 3 Figures 1, 3 ns Units Conditions CL = 15 pF, RD = 1 MΩ S1 = OPEN Figures 1, 3 Figure Number