利用Simulink对变电站电压无功综合模糊控制的仿真概要
Simulink模糊控制教程

给出复杂模糊控制器设计实例和 结果展示
实战演练三:模糊控制器优化与改进
模糊控制器优化方法:遗传算法、粒子群算法等 改进模糊控制器性能的措施:调整隶属度函数、增加模糊规则数量等 实际应用中模糊控制器的调试与测试 案例分析:某工业过程控制中模糊控制器的应用与优化
实战演练四:模糊控制器在实时系统中的应用
更多可能性。
模糊控制理论的研 究将更加注重实际 应用,与工程实践 的结合将更加紧密, 推动工业自动化领 域的进步与发展。
模糊控制在工业自动化领域的应用前景
工业自动化领域的现状和 趋势
模糊控制技术的优势和特 点
模糊控制在工业自动化领 域的应用案例
模糊控制在工业自动化领 域的未来发展前景
感谢观看
汇报人:XX
控制器性能评估
评估指标:准确性、稳定性、鲁棒性 评估方法:仿真实验、实际测试 评估工具:Simulink、Matlab/Simulink 评估步骤:设计控制器、搭建仿真模型、进行实验测试、分析实验结果
05
Simulink模糊控制应用实例
模糊控制在电机控制系统中的应用
模糊控制原理简介
模糊控制在电机控制中的应用实 例
练
01
添加章节标题
02
Simulink模糊控制简介
模糊控制基本概念
模糊控制是一种 基于模糊集合理 论的控制方法, 通过将输入变量 模糊化,将模糊 逻辑应用于控制
系统。
模糊控制的基 本原理是通过 模糊化、模糊 推理和去模糊 化三个步骤实
现控制。
模糊集合理论是 模糊控制的基础, 它通过模糊集合 来表示输入和输 出变量,并使用 模糊逻辑规则进
去模糊化操作
定义:将模糊逻辑系统输出 的模糊集合转换为清晰值的 过程
电力系统的MATLABSIMULINK仿真与应用_第1章

电力系统的MATLABSIMULINK仿真与应用_第1章第1章概述教:电力系统的材ATMLB/ASmuiinl仿k及应真用王晶国翁庆有兵张西电子安科大技学版出社论理教学:0学3时上机教:1学学8第1章时概述第章概述111.电系力统用常真仿软简介1件2.MATLAB/ISMUILKN述1概3.简电单演路示习题第1章述概1.1电系力常统仿用真件软介简力系电是统一个规模、大变的时杂复统系在国,民济经有中非重常的作用要。
电力系统字仿数真成已为力电系研统、究规划、行、运设计各等方面不可个缺或的具,特工是电力别系统新术的技开研究发新、装置设的、计参数确的定更是需要过仿真来确认。
目通常前用的电力系统真软件仿有:(1邦纳)维尔力电局Bonn(vileleowePrdmAniirtaiton,BP)A开发的PA程B和EMT序P(ElcteroagnmetiTcaniretnProram)程序;g1章第概述()2尼托巴曼高直压输电研流究心(M中natioabHDCReVaechrCenet)开r的发PCSDAEM/DC(TPoerwySemCtmoputrAideedDein/glectEoramngticeTranient PrgrominacudilngDirceturrenC)t序程;(3)德西国子公门司制研的力系电仿统真件软NEOMTAC(NtweokrToroniacMhnieCnotrl)o;4)(中电力科学国研究院开的电发力系分统析合综程序PSASP(oPweryStmAneayliSftowaerPackage;)()5MatWhro公k司发开的科与学工程算软件计ATLMABMat(riL某barotoary矩,实验室阵。
)第1章述概电力统分析系软件了除以几上,还有美种国加大学州伯克利校分制研的PPSCIES(miulaiotnPogramwrithnItegaretCircdiuEmthapi)美国、TP 公司开发I的PSSE/美、EPRI公国司开的ETMS发P、BBA公司开发的YMSPO程W序美和国ESAD公开发的电司力统分析系软件DSAE等。
MATLAB-SIMULINK在电力系统工程仿真中的应用

MATLAB-SIMULINK在电力系统工程仿真中的应用MATLAB/SIMULINK在电力系统工程仿真中的应用随着电力系统的规模日益庞大和复杂性的增加,为确保电力系统的安全可靠运行,电力系统工程仿真成为了工程设计和运维过程中的重要环节。
MATLAB/SIMULINK作为一种强大的仿真工具,可以有效地模拟电力系统的各种电路、设备与系统,为电力系统工程提供精确的仿真分析与设计。
电力系统工程仿真是一种通过计算机模拟的方法,用以预测和分析电力系统的运行状况和特性。
在传统的电力系统工程中,工程师们常常使用基于经验公式和简化模型的手工计算方法进行设计和评估。
然而,由于电力系统的复杂性和不确定性,采用手工计算方法不仅效率低下,而且容易出现误差。
相比之下,MATLAB/SIMULINK具有更高的仿真精度和灵活性,能够更准确地模拟电力系统的各个方面。
首先,MATLAB/SIMULINK可以用来模拟电力系统的电路和设备。
在电力系统中,包括变压器、发电机、电动机等各种电器设备都是电路连接的要素。
MATLAB/SIMULINK提供了丰富的电路模型和元件库,可以很方便地构建各种电路模型。
例如,我们可以根据电路拓扑结构和参数数据构建一个发电机的模型,通过输入不同的工作条件和控制信号,可以模拟发电机在各种负载情况下的工作状态。
其次,MATLAB/SIMULINK还可以用来模拟电力系统的控制策略。
在电力系统中,各种控制策略被用来保持电力系统的稳定运行。
例如,电力系统中常用的电压控制和频率控制都是通过调节发电机和变压器的控制信号来实现的。
在MATLAB/SIMULINK中,我们可以根据电力系统的实际控制策略,构建相应的控制模型,通过输入系统的状态量和反馈信号,并根据设计的控制逻辑进行仿真分析。
这使得工程师们可以在设计阶段对控制策略进行优化,以提高电力系统的稳定性和鲁棒性。
此外,MATLAB/SIMULINK还可以用于电力系统的故障分析和可靠性评估。
simulink的电力系统仿真实验原理

simulink的电力系统仿真实验原理电力系统仿真实验原理:电力系统仿真实验是利用Simulink软件对电力系统进行建模、仿真和分析的过程。
该实验主要包括如下几个步骤:1. 建立电力系统模型:在Simulink环境中,根据实际电力系统的结构和特性,利用各种电力元件如发电机、变压器、传输线路、负荷等构建电力系统模型。
可以根据具体需要设置不同的电路参数和拓扑结构,以便对各种电力系统问题进行仿真分析。
2. 设定仿真参数:根据实验要求,设定仿真的时域范围、仿真步长以及模型的输入和输出要求。
例如,可以设定仿真时间为几百毫秒或几秒钟,仿真步长为毫秒级别,以获取系统各个节点的电压、电流等参数。
3. 添加模型控制器:根据需要,可以在模型中添加各种控制器如PID控制器、调速器等,以实现对电力系统的调节和控制。
控制器的参数可以根据实验要求进行设定和调整,以达到理想的控制效果。
4. 进行仿真实验:单击Simulink软件中的"运行"按钮,系统便开始进行仿真计算。
Simulink根据所设定的仿真参数和模型的输入,采用数值计算方法对电力系统进行仿真计算,并输出各个节点的电压、电流等参数。
仿真的过程也可以通过实时仿真功能进行可视化展示。
5. 分析仿真结果:根据仿真结果,可以对电力系统的运行情况进行分析和评估。
例如,可以分析系统的稳定性、安全性、损耗情况等。
如果仿真结果与实际情况存在差异,可以进一步调整电力系统模型和仿真参数,以提高仿真的准确性。
通过Simulink软件的电力系统仿真实验,可以有效地分析和解决实际电力系统中的问题。
同时,仿真实验也为电力系统的运行和优化提供了可靠的依据,减少了实验成本和风险。
模糊控制实例及simulink仿真实验报告
模糊控制实例及simulink仿真实验报告
一、背景介绍
模糊控制是一种基于模糊逻辑的控制方法,其优点在于可以很好地处理复杂的非线性和不确定性系统,而且不需要精确的数学模型和计算,能够快速实现控制的优化。
二、实例介绍
本次实例采用一个双轮小车为对象,实现小车在平面上向指定位置运动的控制。
通过小车的速度和转向角两个输入变量,输出一个模糊控制信号,控制小车前进和转向。
三、实验过程
1. 建立模糊控制系统模型
打开Simulink软件,建立一个新模型,模型中包括输入变量、输出变量和控制器。
2. 设计输入变量和输出变量
(1)设计输入变量
本实例选择小车速度和转向角两个输入变量,每个变量包含三个模糊集合,速度变量分别为“慢速”、“中速”、“快速”,转向角变量分别为“左转”、“直行”、“右转”。
(2)设计输出变量
模糊控制信号输出变量选择小车的前进和转向,每个变量包含三个模糊集合,分别为“慢行”、“中行”、“快行”、“左转”、“直行”、“右转”。
3. 建立控制器
建立模糊控制器,包含输入变量和输出变量的关系,建立控制规则库和模糊关系。
4. 仿真实验
在Simulink下进行仿真实验,调整控制器参数,观察小车运动状态,对比试验。
四、实验结果
经过多次试验和调整,得到最优的小车模糊控制参数,可以实现小车的平滑运动
和准确转向。
五、实验结论
本实验通过建立一个小车的模糊控制系统,可以有效实现小车的平滑运动和准确转向,控制效果优于传统的PID控制方法。
模糊控制可以很好地处理非线性、不确定性和模糊性的系统,适合许多需要快速优化控制的场合。
基于simulink的模糊控制仿真
基于simulink的模糊控制仿真已知系统的传递函数为:1/(10s+1)*e(-0.5s)。
假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计(1)常规的pid控制器;(2)常规的模糊控制器;(3)比较两种控制器的效果;(4)当通过改变模糊控制器的比例因子时,系统响应有什么变化?一、基于Simulink的PID控制器仿真与调试:调节后的kp,ki,kd分别为:10,1,0.05。
示波器观察到的波形为:二、基于Simulink的模糊控制器仿真与调试:(1)启动matlab后,在主窗口中键入fuzzy回车,屏幕上就会显现出如下图所示的“fiseditor”界面,即模糊推理系统编辑器。
(2)双击“输入数量”或“输出数量”模块框中的任意一个,弹出成员资格函数编辑器,缩写为MF编辑器。
(3)在fiseditor界面顺序单击菜单editor―rules出现模糊规则编辑器。
本设计采用双输入(偏差E和偏差变化EC)单输出(U)模糊控制器。
E的域为[-6,6],EC的域为[-6,6],u的域为[-6,6]。
它们的状态为负大(NB)、负中(nm)、负小(NS)、零(Zo)、正小(PS)、正中(PM)和正大(PB)。
语言值的隶属函数选择三角形的隶属函数。
选择Mamdani控制规则作为推理规则。
该控制器的控制规则表如图所示:Simulink仿真图如下:在调试过程中发现加入积分调节器有助于消除静差,通过试凑法得出量化因子,比例因子以及积分常数。
ke,kec,ku,ki分别是:3,2.5,3.5,0.27三、实验经验:通过比较pid控制器和模糊控制器,我们可知两个系统观察到的波形并没有太大的区别。
相对而言,对于给出精确数学模型的控制对象,pid控制器显得更具有优势,其一是操作简单,其二是调节三个参数可以达到满意的效果;对于给出给出精确数学模型的控制对象,模糊控制器并没有展现出太大的优势,其一是操作繁琐,其二是模糊控制器调节参数的难度并不亚于pid控制器。
利用Simulink对变电站电压无功综合模糊控制的仿真的开题报告
利用Simulink对变电站电压无功综合模糊控制的仿真的开题报告【研究背景】在现代电力系统中,电压和无功功率是非常重要的电气量,它们对电网的稳定性和功率质量具有非常大的影响。
因此,电力系统运行管理的目标之一就是通过控制电压和无功功率来保持电网的稳定和功率质量。
近年来,随着控制技术和数学方法的不断进步,综合模糊控制在电力系统中得到了广泛的应用。
利用综合模糊控制技术,可以针对不同的电压和无功功率控制问题,设计出适用于多种场景的控制方案。
变电站是电力系统的重要组成部分,它是电网的高、中、低压之间进行能量转换和传输的重要节点。
变电站的运行状态关系到整个电力系统的稳定性和能量传输质量,因此对变电站的电压和无功功率进行控制是非常重要的。
目前,变电站电压和无功功率的控制主要采用PID控制和模糊控制。
但是,这些控制方法无法处理控制参数的模糊和不确定性,同时也无法满足复杂的控制需求。
因此,利用综合模糊控制技术对变电站电压和无功功率进行控制是非常有必要的。
【研究目的】本课题旨在通过利用Simulink软件对变电站电压和无功功率进行综合模糊控制的仿真,研究综合模糊控制在变电站电压和无功功率控制中的应用效果。
具体研究目的如下:1.设计一个可以实现变电站电压和无功功率控制的综合模糊控制系统。
2.分析综合模糊控制系统对变电站电压和无功功率控制的效果,并与传统的PID控制和模糊控制进行比较。
3.通过仿真结果,探讨综合模糊控制技术在变电站电压和无功功率控制中的应用优势和局限性。
【研究内容】本课题的研究内容主要包括以下三个方面:1.变电站电压和无功功率控制系统的建模:利用Simulink软件建立变电站电压和无功功率的模型,并实现基本的控制逻辑。
2.变电站电压和无功功率的综合模糊控制设计:根据变电站电压和无功功率的模型,设计一个综合模糊控制系统,包括模糊控制器的建立、模糊规则库的构建和规则推理机制的设计等。
3.仿真分析:利用Simulink软件对所设计的变电站电压和无功功率的综合模糊控制系统进行仿真,并与传统的PID控制和模糊控制进行比较分析,探讨综合模糊控制技术在变电站电压和无功功率控制中的应用效果和优势。
基于MATLAB_SIMUINK的模糊控制系统设计与仿真
基于MATLAB/SIMUINK 的模糊控制系统设计与仿真一. 目的进一步深入理解模糊控制的原理,学习设计模糊控制器的方法。
掌握用SIMULINK 进行模糊控制系统仿真分析的方法。
二.基于SIMULINK 平台的模糊控制系统设计一个模糊控制器去控制下面的被控对象(每人选一个)。
系统输入是阶跃信号,达到的性能指标:超调小于15%,调节时间尽可能短。
1. 二阶被控对象 12()(1)(1)sK e G s T s T s τ-=++其中 K=20,T 1=10,T 2=30,τ=3K=30,T 1=5, T 2=35,τ=5K=40,T 1=10,T 2=15,τ=2K=10,T 1=8, T 2=30,τ=4K=20,T 1=10,T 2=25,τ=6 K=4 ,T 1=8, T 2=30,τ=4 K=20,T 1=20,T 2=5, τ=6K=15,T 1=20,T 2=20,τ=4K=10 T 1=20,T 2=5, τ=10K=15,T 1=2,T 2=20, τ=6三阶被控对象 12()(1)(1)K G s s T s T s =++其中 K=10,T 1=5, T 2=15K=5, T 1=10,T 2=30K=20,T 1=20,T 2=25K=10,T 1=40,T 2=15K=30,T 1=50,T 2=30K=20,T 1=60,T 2=252. 用SIMULINK 的Fuzzy 控制器和被控对象组成模糊控制系统。
3. 设计模糊控制器参数:二输入单输出(控制量有限幅:-8 < u < 8。
)确定输入、输出的隶属函数(可选三角形、梯形、高斯函数),语言变量取5~9个左右;设计模糊控制规则;模糊推理方法(可选极大-极小、极大-乘积);清晰化方法(可选centroid 重心法,bisector 面积平分法等)。
每人做两个不同的组合。
4.做阶跃信号的跟踪仿真实验。
记录系统的输出,控制器输出。
Matlab模糊控制器的设计以及simulink下对模糊控制器系统的仿真(word文档良心出品)
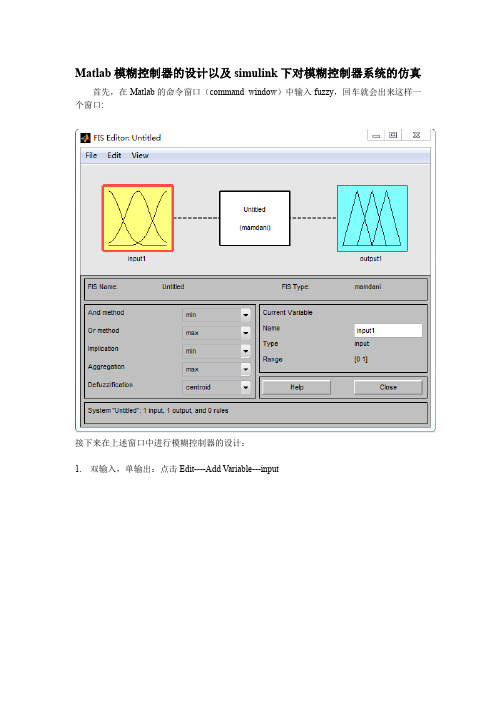
Matlab模糊控制器的设计以及simulink下对模糊控制器系统的仿真首先,在Matlab的命令窗口(command window)中输入fuzzy,回车就会出来这样一个窗口:接下来在上述窗口中进行模糊控制器的设计:1.双输入,单输出:点击Edit----Add Variable---input2.为E添加隶属度函数,E的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},E的模糊集合为{NB,NM,NS,NZ,PZ,PS,PM,PB},Edit—Membership Function edit,如下图所示:3.为EB添加隶属度函数,EB的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},EB的模糊集合为{NB,NM,NS,ZE,PS,PM,PB},Edit—Membership Function edit,如下图所示:4.为U添加隶属度函数,U的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},U的模糊集合为{NB,NM,NS,ZE,PS,PM,PB},Edit—Membership Function edit,如下图所示:其中E,EB,U均为模糊量。
5.为模糊控制器设计模糊规则,由于E的语言变量有8个,EB的语言变量有7个,所以模糊控制器的模糊规则总共有8*7=56条,接下来为模糊控制器添加规则:双击untitled,则有下面的表格:制定完成后,会形成模糊规则矩阵,系统会根据模糊输入量E,EB,经过模糊控制规则[56条],进而确定输出量U。
6.对输入量模糊化以及对输出量清晰化,我们采取最小最大重心法。
7.点击export—to file. ***#$.fis文件就是所设计的控制器。
8.下面对我们设计的模糊控制器进行检验,所构建的系统如下:系统分析:模糊控制器:双输入单输出,输入为误差以及误差的变化率的模糊量,输出为控制量的模糊量,模糊控制器中有56条规则。
模糊pid_matlab(simulink)仿真详细步骤
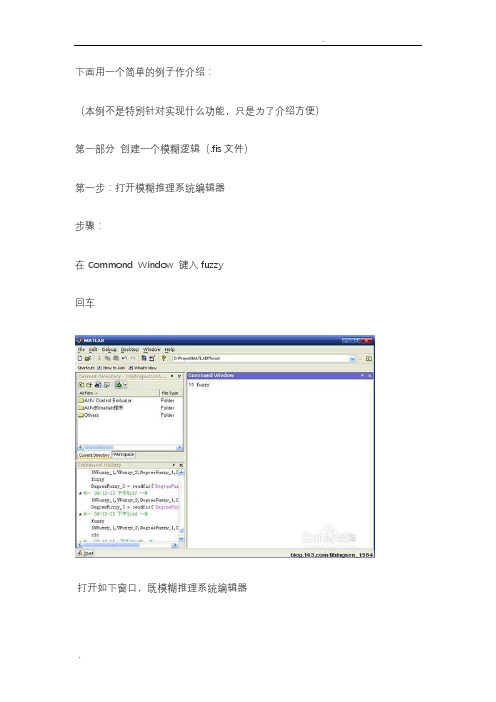
下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为 probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值围,本例中In_x和In_y的取值围均为[0 10], Out_x和Out_y的取值围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs 设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name 中键入名称,在Type 中选择形状,在Params中键入围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
模糊控制系统的MATLABSIMULINK仿真与分析

收稿日期:2000207203 基金项目:河南省教委自然科学基金项目(97465001) 作者简介:王东云(19642),男(汉族),湖南津市人,中原工学院电气工程系副教授、工学博士. 第11卷第4期郑州纺织工学院学报V ol.11 N o.42000年12月JOURNA L OF ZHENGZH OU TEXTI LE INSTITUTE Dec.,2000 文章编号:100724945(2000)0420001204模糊控制系统的MAT LAB ΠSI MULINK 仿真与分析王东云1,凌德麟2(1.中原工学院电气工程系;2.中原工学院院部,河南郑州 450007)摘要: 针对M AT LAB ΠSI M U LI NK 的模糊控制工具箱的使用方法和应用的相关文献尚未见到的情况,介绍了基于M AT 2LA B ΠSI M U LI NK 的模糊控制系统仿真分析的方法与步骤.在仿真的基础上,研究了量化因子、比例因子对模糊控制性能的影响.关 键 词: M AT LAB ΠSI M U LI NK;模糊推理系统;模糊控制;隶属度函数中图分类号:TP273.5 文献标识码:A MAT LAB 软件自1984年由美国的Math W orks 公司推出以来,其应用范围越来越广泛.目前的MAT LAB 已经成为国际上最为流行的软件之一[1].它除了传统的交互式编程之外,还提供了丰富的矩阵运算、图形绘制、数据处理、图像处理、方便的Windows 编程等便利工具.另外,MAT LAB 有很强的开放性,针对不同的应用学科,在MAT LAB 上可以推出不同的工具箱,这样就大大扩展了MAT LAB 的运用范围.目前,已经推出了控制系统的工具箱、系统辨识工具箱、神经网络工具箱、信号处理工具箱及模糊推理系统工具箱等许多学科性的工具箱,但针对具体的学科性的工具箱的使用方法和应用的相关文献尚未见到.因此本文详细介绍了利用MAT LAB5.0模糊推理工具箱,进行模糊控制系统的仿真与分析的方法与步骤.1 MAT LAB ΠSIMU LINK 简介MAT LAB 语言是一种面向科学与工程计算的高级语言,基本语法单元是矩阵.变量的赋值采用:变量=表达式的形式,变量有全局变量和局部变量两种.MAT LAB 的数据结构非常简单,只有数据变量和字符变量两种.MAT LAB 语言有三种基本的程序结构:顺序结构、循环结构及分支结构.其中循环结构有FOR -E ND 循环和WHI LE -E ND 循环两种.FOR -E ND 循环的一般形式为:FOR x =表达式(形如x =起点:步长:终点)循环体E ND WHI LE -E ND 循环的一般形式为:WHI LE 表达式(表达式非零,则执行循环体)循环体E ND 分支、结构的一般形式为:IF (表达式(非零)) 语句体 1E LSE 语句体 2E NDMAT LAB 的M 文件在功能上可分为两种类型:文本文件和函数文件.这两种文件都是ASCII 码的文本格式.文本文件包含一系列专门的MAT LAB 语句,当运行一个文本文件时,将自动执行一系列命令直至给出最终结果,而不是交互地等待键盘输入,如M 文件的第一行包“FUNCTI ON ”,则这个文件就是函数文件.其一般形式:FUNCTI ON[输出函数1,输出函数2,…]=函数名(输入参数1,输入参数2,…).函数调用格式:[输出参数1,输出参数2,…]=函数名(输入参数1,输入参数2,…).M A T LA B 有很强的绘图功能,用命令plot ()实现.SI MU LI NK 子库是一个建模、分析各种物理和数学系统的软件.它用框图表示各系统的各个环节,用带方向的连线表示各环节的输入输出关系.SI M U LI NK 的启发十分丰富,只需在命令窗口键入“SI M U LI NK ”命令,此时出现一个SI M U LI NK 窗口,包含七个模型库和一个DE M OS ,分别是:信号源库、输出库、离散系统库、线性系统库、非线性系统库及扩展系统库.在这些库中你可以找到你所需的每个环节,必要时,你还可以建立自己的环节库.具体方法可参见文献[2].2 利用M A T LA B 建立模糊控制仿真系统2.1 利用图形编辑器编辑模糊推理系统(FIS )在MAT LAB 的命令状态下键入Fuzzy.模糊推理系统图形编辑器如图1所示.它显示了模糊推理系统的高层信息.在顶部有一标名为输入和输出的系统图表,通过双击输入或输出框,产生隶属函数编辑器;双击图表中心的模糊规则框,产生规则编辑器.图1 模糊推理系统图形编辑器 图表的下方是显示当前FIS 名的文本区.窗口的左下角有一系列弹出菜单使你能定义用于模糊隐含程序的变量函数,右下方是提供关于当前变量信息的区域.通过单击输入或输出框来决定当前变量.如此我们构造了一个模糊推理系统,即建立了模糊控制器的输入输出变量名称、个数、变量的论域、分档、隶属度函数的形式、模糊运算方法、去模糊的方法、模糊规则集等.实际上我们可以利用show fis ()函数来查阅有关模糊推理系统的信息.另外还可以给刚刚建立的模糊推理系统取个名字,如:Firstfis.2.2 利用SIMU LINK 的图形编辑器构造模糊控制系统图2为一常规模糊控制系统.图2 常规的模糊控制系统结构其中:K 1、K 2为量化因子;K 3为比例因子.对如图2所示的模糊控制系统我们可以使用SI M 2U LI NK 的图形编辑器构造出,其步骤如下:(1)键入simulink ,进入SI MU LI NK 的图形编辑器.(2)在File ΠNew 下建立一个M odel 文件.(3)根据控制系统结构,利用SI MU LI NK 的图形编辑器,从SI MU LI NK 的模型库中“拖出”所需的各个环节,如在Blockets &T oolboxes 中的SI MU LI NK Fuzzy 库中,我们可以“拖出”Fuzzy logical controller ,在Linear 库或其它库中,我们可以设定控制对象.最后我们可以构造出所需的控制系统(见图3).图3 模糊控制系统控制框图 注意在“拖出”所需的各个环节后,可以设置各环・2・ 郑州纺织工学院学报 2000年 第11卷 节的参数.如设置比例环节的比例系数等.注意在设置模糊控制器时,要把在第一步建立的模糊推理系统与之统一起来,这样就可以在仿真时使用.这时我们可以使用MAT LAB 命令:afuzzycontroller =readfis (‘firstfis ’)其中firstfis 为在第一步建立的模糊推理系统名,接下来我们可以开始仿真.3 基于MAT LAB 的模糊控制仿真分析实例 对图2的一个经典的二维模糊逻辑控制器,比例因子K 1和K 2分别相当于模糊控制的比例作用和微分作用的系数,K 3则相当于总的放大倍数[3,4].K 1,K 2增大,相当于控制器的比例作用、微分作用增强;而K 3增大,相当于控制器的放大倍数加大.如图4为不同K 1时系统的阶跃响应.如图5为不同K 3时系统的阶跃响应.由以上仿真结果,我们不难分析出量化因子和比例因子对控制系统性能的影响:图4 K 1为不同值的系统响应图5 K 3为不同值的系统响应 (1)K 1越大,系统调节惰性越小,上升速率越快.(2)K 1过大,系统上升速率过大,产生的超调大,使调节时间增长,严重时还会产生振荡乃至系统不稳定.(3)K 1过小,系统上升速率较小,系统调节隋性变大,同时也影响系统的稳态性能,使稳态精度降低.(4)K 3增大,相当于系统总的放大倍数增大,系统的响应速度加快.(5)K 3过大,会导致系统输出上升速率过大,从而产生过大的超调乃至振荡和发散.(6)K 3过小,系统的前向增益很小,系统输出上升速率较小,快速性变差,稳态精度变差.4 结 语利用MAT LAB 来实现模糊控制器的仿真分析非常简便,为研究模糊控制理论、设计模糊控制器提供了有力的工具.如何利用MAT LAB 来实现自适应模糊控制器的仿真分析与设计,应是我们下一步要研究的问题.参考文献:[1] 张培强.M AT LAB 语言—演算纸式的科学工程计算语言[M].合肥:中国科技大学出版社,1995.228-327.[2] 施阳,李涛,许忻等.M AT LAB 语言精要及动态仿真工具S imulink[M].西安:西北工业大学出版社,1998.356-367.[3] 孙庚山,兰西柱.工程模糊控制[M].北京:机械工业出版社,1995.76-81.[4] 章正斌,吴汝善,于健.模糊控制工程[M].四川:重庆大学出版社,1995.288-290.(下转第7页)・3・ 第4期 王东云等:模糊控制系统的M AT LAB ΠSI M U LI NK 仿真与分析 (2)与静态冰蓄冷相比,动态冰蓄冷有以下特点:蓄冰槽内水温分布较均匀,不会出现温度不均及槽体的结构产生的“死区”.由于减少了管外冰壳造成的热阻,使水温下降较快,提高了整体结冰速度;且水流均匀冲刷盘管壁面,增大了管外的换热系数,充分利用了水的显热与潜热蓄冷的能力.(3)建议在冰蓄冷的过程中,采用动态的蓄冷过程.提高水的显热及潜热的利用能力.同时由于动态蓄冰时,槽体内水温低并且均匀,使释冷水温在较长时间保持稳定,提供较大的释冷速率,适应于短时间内需要大量的冷量的场合.国内一些公共建筑,如:体育馆、影剧院、会堂等均可采用动态冰蓄冷技术,提高经济效益.5 致谢本实验得到了中原工学院暖通空调教研室周光辉、范晓伟、王军及其专业实验室付光轩、刘寅等老师的大力帮助,在此表示感谢.参考文献:[1] 方贵银.蓄冷平板堆积床动态蓄冷性能研究[J ].制冷,1999,(2):1-6.[2] 华泽钊,刘道明.蓄冷技术及其在空调中的应用[M].北京:科学出版社,1997.48-64.[3] 张永铨.蓄冷空调系统[M].北京:中国建筑工业出版社,1998.20-38.[4] W.D.马克劳斯基.陈义雄译.冰蓄冷与区域供冷[J ].暖通空调,1996,(1):71-73.Experimental R esearch of W ater T emperature Form ation in theCooling Storage T ank for Dynamic and Static Perform ance Cooling SystemsLI U Jian 1,G ONG Y i2(1.X i ′an University of Architecture &T echnology ,X i ′an 710049;2.Zhongyuan Institute of T echnology ,Zhenzhou 450007,China ) Abstract : The purpose of this paper focuses specially on the experimental research on the water tem perature formation mechanism of the ice storage processes on the external melt ice 2on 2coil system in the ice storage tank ,in which the system op 2erats with different performance.Through the research of this system ,the characteristic of the initial tem perature of the cooling water with the time is studied.The result can be used by engineering designer.K ey w ords : evaporator helical coil ;ice storage am ount ;cooling space(上接第3页)Simulation and Analysis for Fuzzy ControlSystem B ased on MAT LAB ΠSIMU LINKWANG Dong 2yun ,LI NG De 2lin(Zhongyuan Institute of T echnology ,Zhengzhou 450007,China ) Abstract : Methods for simulating and analyzing fuzzy control system with MAT LAB ΠSI MU LI NK are introduced in thispaper ,for no relating references were published.Further m ore effect on performance of fuzzy control system by quantum factor and proportional factor is studied.K ey w ords : MAT LAB ΠSI MU LI NK;fuzzy inference system (FIS );fuzzy control ;membership function・7・ 第4期 刘 建等:动、静态冰蓄冷蓄冷槽水温变化的实验分析 。
基于MatlabSimulink的电力变压器仿真建模及特性分析-(文献综述)
基于Matlab/Simulink的电力变压器仿真建模及特性分析二O一四年三月前言额定容量是一个表现功率的惯用值,它是表征传输电能的大小,以k·V A或M·V A表示,当对变压器施加额定电压时,根据它来确定在规定条件下不超过温升限值的额定电流。
较为节能的电力变压器是非晶合金铁心配电变压器,其最大优点是,空载损耗值特低。
最终能否确保空载损耗值,是整个设计过程中所要考虑的核心问题。
当在产品结构布置时,除要考虑非晶合金铁心本身不受外力的作用外,同时在计算时还须精确合理选取非晶合金的特性参数。
国内生产电力变压器较大的厂家有一开投资集团,中电电气,保变天威,西电集团,山东明大电器,山东电力设备厂等。
[2]当一次绕组通以交流电时,就产生交变的磁通,交变的磁通通过铁芯导磁作用,就在二次绕组中感应出交流电动势。
二次感应电动势的高低与一二次绕组匝数的多少有关,即电压大小与匝数成正比。
主要作用是传输电能,因此,额定容量是它的主要参数。
[1]电力变压器是一种静止的电气设备,是用来将某一数值的交流电压〔电流〕变成频率相同的另一种或几种数值不同的电压〔电流〕的设备在电力系统传送电能的过程中,必然会产生电压和功率两部分损耗,在输送同一功率时电压损耗与电压成反比,功率损耗与电压的平方成反比。
利用变压器提高电压,减少了送电损失。
[3]电力变压器是发电厂和变电所的主要设备之一。
变压器的作用是多方面的不仅能升高电压把电能送到用电地区,还能把电压降低为各级使用电压,以满足用电的需要。
总之,升压与降压都必须由变压器来完成在过去十年的发展中,我国电力建设快速发展,成绩斐然。
其中,发电装机容量高速增长,电网建设速度突飞猛进,电源结构调整不断优化,技术装备水平大幅提升,节能减排降耗效果显著,电力建设实现了跨越式发展。
这为我国经济社会平稳较快发展提供了强大动力,对改善人民生活起到了重要支撑和保障作用。
国家统计局数据显示,2007-2011年,电力变压器制造行业的销售规模不断扩大,销售收入每年以13%以上的速度增长,2011年销售收入到达1784.36亿元,同比增长16.53%;实现利润总额102.14亿元,同比减少5.43%。
基于MATLAB_SIMULINK直流电机模煳控制系统的建模与仿真

Appliances Technology
基于 MATLAB/SIMULINK 直流电机模糊控制系 统的建模与仿真
肖文英 1 ,李军红 2 ,阳武娇 2 ( 1 . 湖南工学院电气与信息工程系,湖南衡阳 4 2 1 0 0 8 ;
2 . 南华大学,湖南衡阳 4 2 1 0 0 1 ) 摘 要: 将 M A T L A B 中的模糊控制工具箱和 S I M U L I N K 有机结合起来,实现了直流电 机模糊控制系统的建模与仿真。 关键词: 模糊控制; 直流电机; S I M U L I N K
1 引言
计算机仿真技术是应用电子计算机对研究对象的 数学模型进行计算和分析的方法。M A T L A B 是目前控制 系统计算机辅助设计最有效的工具,它不仅能解决控 制论中大量的矩阵运算问题,而且提供了强有力的工 具箱支持[ 1 ] 。另外,M A T L A B 中还嵌入了控制系统模型输 入与仿真工具 S I M U L I N K 。S I M U L I N K 具有建模简单直观、 动态修改系统参数、界面友好、功能强大等优点,是动 态建模与仿真方面应用最广泛的软件包之一[ 2 ] 。本文将 M A T L A B 中的模糊控制工具箱和 S I M U L I N K 有机结合起 来,实现了直流电机模糊控制系统的建模与仿真。
43
MATLAB/SIMULINK- Based Modeling and Simulation of Fuzzy Control
SystemforDC Motor XIAO Wen-ying LI Jun-hong YANG Wu-jiao Nanhua University, Hengyang, 421001, China Abstract: This paper introduces the modeling and simulation of fuzzy control system for DC motor. It is realized by combining the fuzzy control box and the SIMULINK module in MATLAB. Key words: Fuzzy control; DC motor; SIMULINK
如何使用Simulink模糊控制
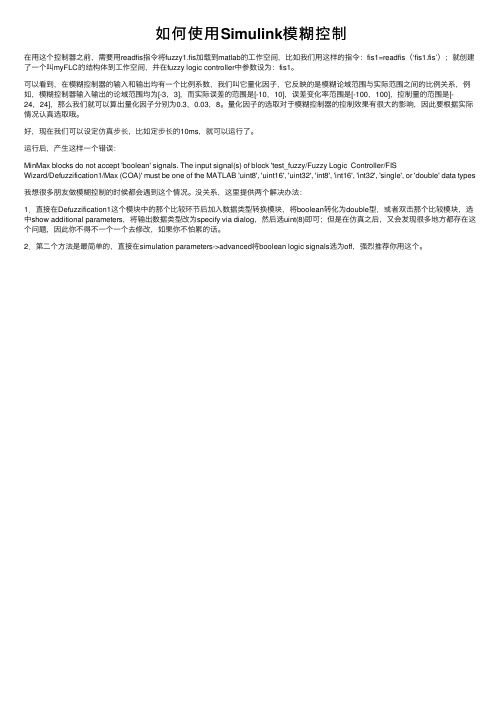
如何使⽤Simulink模糊控制在⽤这个控制器之前,需要⽤readfis指令将fuzzy1.fis加载到matlab的⼯作空间,⽐如我们⽤这样的指令:fis1=readfis(‘fis1.fis’);就创建了⼀个叫myFLC的结构体到⼯作空间,并在fuzzy logic controller中参数设为:fis1。
可以看到,在模糊控制器的输⼊和输出均有⼀个⽐例系数,我们叫它量化因⼦,它反映的是模糊论域范围与实际范围之间的⽐例关系,例如,模糊控制器输⼊输出的论域范围均为[-3,3],⽽实际误差的范围是[-10,10],误差变化率范围是[-100,100],控制量的范围是[-24,24],那么我们就可以算出量化因⼦分别为0.3,0.03,8。
量化因⼦的选取对于模糊控制器的控制效果有很⼤的影响,因此要根据实际情况认真选取哦。
好,现在我们可以设定仿真步长,⽐如定步长的10ms,就可以运⾏了。
运⾏后,产⽣这样⼀个错误:MinMax blocks do not accept 'boolean' signals. The input signal(s) of block 'test_fuzzy/Fuzzy Logic Controller/FISWizard/Defuzzification1/Max (COA)' must be one of the MATLAB 'uint8', 'uint16', 'uint32', 'int8', 'int16', 'int32', 'single', or 'double' data types 我想很多朋友做模糊控制的时候都会遇到这个情况。
没关系,这⾥提供两个解决办法:1.直接在Defuzzification1这个模块中的那个⽐较环节后加⼊数据类型转换模块,将boolean转化为double型,或者双击那个⽐较模块,选中show additional parameters,将输出数据类型改为specify via dialog,然后选uint(8)即可;但是在仿真之后,⼜会发现很多地⽅都存在这个问题,因此你不得不⼀个⼀个去修改,如果你不怕累的话。
Simulink模糊控制教程

在20世纪70年代和80年代,模糊控制的理论框架逐渐形成,模糊 集合、模糊逻辑和模糊推理等基本概念得到深入研究和应用。
应用
随着计算机技术的发展,模糊控制的应用领域不断扩大,涉及工业控 制、智能家居、医疗等领域。
模糊控制的应用领域
01
工业控制
模糊控制在工业控制领域中得到了广泛应用,例如温度控制、压力控制、
最小值清晰化
将最小值推理得到的输出模糊集合映射到清晰输出上,通常采用中心平均法或 中心最大值法。
04
模糊控制系统的仿真与实 现
模糊控制系统的仿真
模糊逻辑工具箱
使用Simulink的模糊逻辑工具箱 进行模糊控制系统的仿真,可以 方便地创建模糊控制器并进行仿 真分析。
模糊化与去模糊化
在仿真过程中,需要将输入信号 模糊化,将输出信号去模糊化, 以模拟实际模糊控制器的行为。
使用这个工具箱,用户可以轻松地构建和测试各种类 型的模糊控制系统,包括单输入单输出(SISO)系统
和多输入多输出(MIMO)系统。
03
模糊控制器设计
模糊化方法
输入模糊化
将输入信号映射到对应的模糊集合上 ,通常采用三角形、梯形或任何可用 的形状来表示模糊集合。
输出模糊化
根据系统输出和期望输出的偏差,调 整模糊集合的中心和宽度,以实现输 出模糊化。
模糊控制在液位控制系统中的应用
总结词
液位控制系统要求精确控制液位高度,同时要考虑到液体的流动性和容器的形状等因素,模糊控制能够实现高精 度的液位控制。
详细描述
在液位控制系统中,模糊控制器可以根据液位传感器的实时数据和设定值,通过模糊逻辑推理快速调整进液或出 液阀门的开度,实现液位的精确控制。同时,模糊控制器还可以根据液体的物理特性和容器的大小等因素对液位 变化进行预测和控制。
变电站无功电压综合调节的模糊控制研究

Uo
-
对无功电压模型的电压和功率 因数 的上下限边 界进行模糊化处理 , 模糊控制器的输入量 为电压偏 差和功率因数偏差 , 出量为变 比和补偿 电容值 。 输 以双回 10k 1 V的线路 向某变电所供 电为例进行模
糊 控制 器试 验 。
导线采用 L J 8 , G 一15 水平排列 , 间距离 4m, 线 线路长 10k 变 电所装设 S Z 1— 10/ 1 0 m, F L 350 10的 有载调压变压器 , 额定 电压为 10± 2 5 6 3 1 3× . %/ .
图 3中: P为出线的有功功率 ; Q为出线的无功
维普资讯
2 8
继 电 器
即无 功 电压控 制 模 型 。
2 模糊控 制器设计
图 3 等效电路图
F g 3 E uv ln ic i i . q ia e t r ut c
功率 ; 为补偿 容量 ; 为主变压器 的等效阻抗 Q R ( K台)其损耗为 P ∑ ∑ , ; 主变压器的等效电抗 ( K 台) 其损耗为 q∑ P ∑ , ; 。为主变压器的空载有功损耗 ( K台 )g ;。 为主 变压 器 的空 载 无 功损 耗 ( 台) n K ; 为变 压器 的变 比。 考虑电容器组 的有功损耗式 P = c 式中, KQ , K 为补偿装置的功率损耗系数 ( 一般取 K = .0 c 0 04 k ka) W/ vr 。并把参数归算到低压侧 , 由图 3 得到 电
维普资讯
第 3 卷 第 1 期 4 8
2 0 年 9 1 t 06 月 6E
继 电器
RELAY
Байду номын сангаас
Vo . 4 13 No 1 .8
模糊pidmatlab(simulink)仿真详细步骤
下面用一个简单的例子作介绍:(本例不是特别针对实现什么功能,只是为了介绍方便)第一部分创建一个模糊逻辑(.fis文件)第一步:打开模糊推理系统编辑器步骤:在Commond Window 键入fuzzy回车打开如下窗口,既模糊推理系统编辑器第二步:使用模糊推理系统编辑器本例用到两个输入,两个输出,但默认是一个输人,一个输出步骤:1、添加一个输入添加一个输出得如下图2、选择Input、output(选中为红框),在Name框里修改各输入的名称并将And method 改为prod,将Or method 改为probor提示:在命名时’_’在显示时为下标,可从上图看出。
第三步:使用隶属函数编辑器该编辑器提供一个友好的人机图形交互环境,用来设计和修改模糊推理系中各语言变量对应的隶属度函数的相关参数,如隶属度函数的形状、范围、论域大小等,系统提供的隶属度函数有三角、梯形、高斯形、钟形等,也可用户自行定义。
步骤:1、双击任何一个输入量(In_x、In_y)或输出量打开隶属度函数编辑器。
2、在左下处Range和Display Range处添加取值范围,本例中In_x和In_y的取值范围均为[0 10], Out_x和Out_y的取值范围均为[0 1]3、默认每个输入输出参数中都只有3个隶属度函数,本例中每个输入输出参数都需要用到五个,其余几个需要自己添加:选中其中一个输入输出参数点击Edit菜单,选Add MFS…打开下列对话框将MF type设置为trimf(三角形隶属度函数曲线,当然你也需要选择其他类型) 将Number of MFs设置为2点击OK按钮同样给其他三个加入隶属度函数4、选中任何一个隶属度函数(选中为红色),在Name中键入名称,在Type 中选择形状,在Params中键入范围,然后回车如下图:5、关闭隶属函数编辑器第四步:使用规则编辑器通过隶规则编辑器来设计和修改“IF...THEN”形式的模糊控制规则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
总第44卷第503期电测与仪表Vol.44No.503Nov.20072007年第11期ElectricalMeasurement&Instrumentation利用Simulink对变电站电压无功综合模糊控制的仿真*孟伟,包蕊,朴在林(沈阳农业大学信息与电气工程学院,沈阳110161)摘要:本文利用MATLAB的模糊逻辑工具箱对实例变电站的电压无功综合控制设计模糊控制系统。
利用Simulink中的电力系统模块(SimPowerSystems)对实例变电站进行搭建,并将设计好的模糊控制系统与构建的变电站模型连接,完成对变电站电压无功的模糊控制,并对此运行模型得出仿真结果。
分析仿真结果,满足预先的设计思想及理论要求。
关键词:变电站;电压无功;模糊控制;仿真中图分类号:TM933;TM743文献标识码:B文章编号:1001-1390(2007)11-0017-04TheemulationofsubstationvoltagereactiveintegratedfuzzycontrolutilizingsimulinkMENGWei,BAORui,PIAOZai-lin(CollegeofInformationandElectricalEngineering,ShenYangAgriculturalUniversity,Shenyang110161,China)Abstract:ThisarticleusesMATLABthefuzzylogictoolboxdesignfuzzycontrolsystemforexampletransformersubstationvoltagereactiveintegratedcontrol.Buildtheexamplesubsta-tionmodelmakinguseofSimPowerSystemsofSimulink,conjunctingfuzzycontrolsystemandsubstationmodelwhichhasbeenbuilt,completingthecontroltosubstationvoltagereac-tive,runningthismodelandeducingemulationalresult.Analysisit’ssimulinkresult,satisfythedesignthoughtandtheoryrequestinadvance.Keywords:substation;voltage/reactive;fuzzycontrol;Simulink0引言1.1.1模糊控制系统概述凡采用模糊控制器的系统称为模糊控制系统[5]。
模糊控制器不同于常规的控制器那样,采用微分方程,传递函数或状态方程等精确的数学描述,而是通过定义模糊变量、模糊集合及相应的隶属度函数,采用一组模糊条件句来描述输入与输出之间的映射关系。
本文采用模糊控制方法对变电站电压无功进行综合控制[6],并利用MATLAB模糊逻辑工具箱设计相应的控制系统。
在选择模糊控制器各输入输出变量的模糊词集与隶属度函数时充分考虑了变电站电压无功对象的特点。
MATLAB[1]提供的Simulink工具箱是一个用来对动态系统进行建模、仿真和分析的软件包,它为用户提供方框图进行建模的模型接口,该模型接口直观、操作方便、灵活。
其中电力系统模块[2](SimPowerSys-电力tems)在Simulink环境下使用,可以对电路系统、电子系统、电机系统、电力传输过程等进行仿真。
MATLAB模糊逻辑工具箱[3-4]可以利用它所提供的工具在MATLAB框架下设计、建立以及测试模糊推理系统。
结合Simulink,还可以对模糊系统进行模拟仿真,以测试模糊系统的功能和效果。
11.1基于MATLAB模糊逻辑工具箱的变电站电压无模糊控制系统的设计[3]功综合控制系统的设计*国家科技支撑计划资助项目(2006BAJ04B06)1.1.2输入与输出变量模糊集的确定选择电压偏差(ev)的模糊子集为{NB,NS,NZ,PZ,PS,PB}能较为实际地反映变电站电压无功联调的目-17-总第44卷第503期电测与仪表Vol.44No.503Nov.20072007年第11期ElectricalMeasurement&Instrumentation标;选择分接头控制量(nT)的模糊子集为{DOWN,UC,UP}能较为确切地反映变压器分接头的控制特性,其中DOWN为下调分接头,UC为不变,UP为上调;选择无功偏差(eq)和电容器投切的控制量(Qc0)的模糊词集为{NB,NM,NS,Z,PS,PM,PB}。
对于电容器的投切,其中正表示投电容,负表示切电容;NB为负大,NM为负中,NS为负小,Z为零,PS为正小,PM为正中,PB为正大。
1.1.3输入与输出变量论域的选择考虑模糊子集对论域有较好的覆盖程度,按论域中元素总数为模糊子集总数2-3倍的规律,定义模糊输入变量ev(电压偏差)、eq(无功偏差)和输出变量Qc0(电容器组投切控制量)的模糊集论域为[-6,+6],而输出变量nT(分接头控制量)的模糊集论域为[-4,+4]。
1.1.4控制规则的确定控制规则的确定见表1。
表1控制规则表利用MATLAB模糊逻辑工具箱对输入与输出变量论域和模糊集的确定,隶属度函数的选择,控制规则的确定等设计出电压无功模糊控制系统rui.fis。
1.2模糊逻辑工具箱与Simulink的接口在Simulink的模糊逻辑库中最常用的模块是FuzzyLogicController[3],将该方块图拷贝到建立的Simulink仿真模块中,并使模糊逻辑控制器方块图的模糊推理矩阵名称与在MATLAB工作空间(Workspace)建立的模糊推理系统名称相同,即可完成将模糊推理系统与Simulink的连接。
例如本文所建立的模糊推理系统,在MATLAB窗口输入:br=readfis('rui.fis');然后在FuzzyLogicController模块的参数输入对话框中输入模糊推理系统变量名br,如图1所示。
这样就-18-使得上文所建立的模糊控制系统rui.fis通过模块FuzzyLogicController的调用连接到Simulink仿真模型中,从而完成将模糊推理系统与Simulink的连接。
图1参数输入2利用Simulink对实例变电站进行电压无功综合模糊控制的仿真2.1建立电路模型根据实例变电站的简化电路结构(如图2)进行仿真分析[7]。
图2实例变电站电路结构模型2.2建立仿真模型如图3所示,此仿真模型是根据图2所示电路结构设计的[8-10],针对Model1和Model2分别进行的两个独立模型。
其中Model1是没有通过模糊控制对变压器分接头进行调节,并且没有无功补偿装置的;而Model2通过引入模糊控制系统分别对变压器分接头和无功补偿装置进行调节。
系统输出即变压器一次侧电压为66kV,频率为50Hz,系统的视在功率为50MVA,变压器二次侧电压为10kV。
有载调压变压器分接头的初始档位为0。
线路、分支负荷及分散补偿的参数已在仿真模型中标出。
2.3电压无功模糊控制的具体实现2.3.1有载调压变压器模块双击FuzzyControllerBlock模糊控制模块(如图3所示)得到如图4所示的模糊控制子系统,其输入端为电压偏差ev和无功偏差eq,其goto模块nT即是模糊控制器FuzzyLogicController的一个输出端,用from模块nT与goto模块nT相匹配,将from模块nT与比较模块连接,进而与有载调压变压器的up和总第44卷第503期电测与仪表Vol.44No.503Nov.20072007年第11期ElectricalMeasurement&Instrumentationdown端口连接即可达到变压器分接头采用模糊控制的设计思想(如图5所示)。
图3变电站电压无功综合模糊控制的仿真模型图4模糊控制子系统图5采用模糊控制调节变压器分接头2.3.2无功补偿控制模块无功补偿控制的设计思想是采用模糊控制器的输出来控制电容器组的投切。
在设计时将select子系统(如图6所示)连接在STATCOM静止无功补偿器的Trip端。
在select1子系统中,设计了From模块S1,相应在select2子系统中有From模块M2,在select3子系统中有From模块B3。
这3个From模块对应的Goto模块在Qc0无功控制模块(如图3所示)中,双击此模块得到如图7所示的无功控制子系统。
在图7中可以看到From模块Qc0,这个模块与图4中的Goto模块Qc0相匹配,以实现采用模糊控制器的输出来控制电容器组投切的目的。
在图7中可以看到Judge模块,双击此模块得其子系统,此子系统的功能是对模糊控制器的输出Qc0进行判断,判断任意时刻的无功偏差值处在哪一范围内,进而选择投切电容器组数以满足实际要求来达到无功补偿的目的。
图6无功补偿控制图7无功控制子系统2.4分析仿真结果通过观察显示模块Scope,对比Model1和Model2仿真结果,如图8所示,其中蓝色线为Model1的仿真结果,绿色线为Model2的仿真结果,分析如下:(1)Tap1,Tap2(变压器分接头档位):由于Model2模型中采用模糊控制对变压器分接头进行调节,从仿真结果中可以明显看出其分接头调节次数比没有采用模糊控制的Model1模型的调节次数减少了很多,使变压器的使用寿命以及整个系统的电压稳定,从仿真结果看出本设计满足设计要求。
(2)VB2VB4(pu):VB2为Model1中变压器二次侧电压(标么值),VB4为Model2中变压器二次侧电压(标么值)。
可以看出通过模糊控制系统其仿真输出(绿色线)与没有通过控制的仿真输出的(蓝色线)相比,绿色线比蓝色线波动小且围绕着1上下波动,波动次数也明显少了很多,说明通过模糊控制使得系统变压器二次侧输出电压稳定,波动较小,满足设计要求。
(3)PB1PB3(MW):PB1为Model1中变压器一次侧有功功率,PB3为Model2中变压器一次侧有功功-19-总第44卷第503期电测与仪表Vol.44No.503Nov.20072007年第11期ElectricalMeasurement&Instrumentation率。
从仿真结果数值上看两个模型变压器一次侧的有功功率基本一致,由于两个模型在设计时所带的负载是相同的,消耗相同的有功功率,因此理论上两个模型变压器一次侧的有功功率应该是相同的,可见理论分析与实际仿真结果一致。
绿色线比蓝色线波动次数少,说明系统变压器一次侧有功功率输入稳定。
(4)QB1QB3(MVar):QB1为Model1中变压器一次侧无功功率,QB3为Model2中变压器一次侧无功功率。