加计数四位数码管显示(按键消抖)
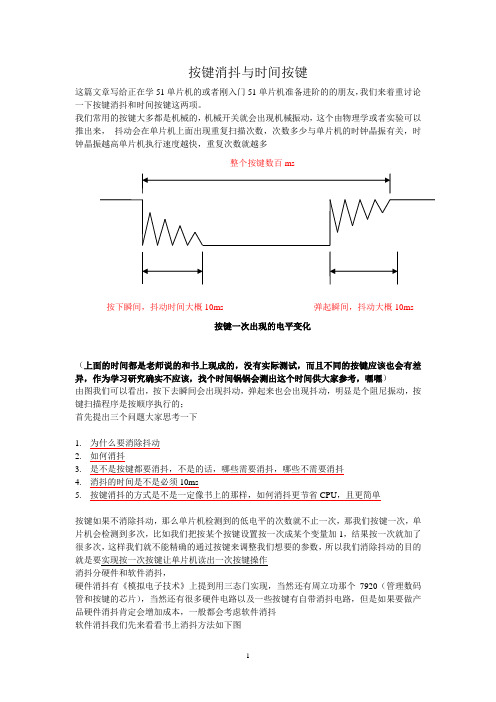
按键消抖与时间按键
case 0xdf:return 6;break;
case 0xbf:return 7;break;
case 0x7f:return 0;break;
}
}
}
定时器函数
void timer0 ()interrupt1
TR0=1;
if(T>100)
{
TR0=0;
T=0;
}
if(TR0=1&&T<100)
continue;//在定时器里面设置初值让定时器中断一次1ms并且T自加1,100次就100ms
switch(key)
{//返回键值
case 0xfe:return 1;break;
case 0xfd:return 2;break;
消抖分硬件和软件消抖,
硬件消抖有《模拟电子技术》上提到用三态门实现,当然还有周立功那个7920(管理数码管和按键的芯片),当然还有很多硬件电路以及一些按键有自带消抖电路,但是如果要做产品硬件消抖肯定会增加成本,一般都会考虑软件消抖
软件消抖我们先来看看书上消抖方法如下图
例程
Unsignedchar keyscan()//这里是用的P2口作为按键的输入口
第4个问题了,从物理上我们可以知道,既然是阻尼振动,必定到振动到某个时候肯定是和稳定的状态一致的,所以肯定不是必须10ms的延时的,比如按下去假设10ms振动后机械才稳定,但是电平上当触点挨得很近振动的时候就算触点不是挨着,还是显示低电平
第5个问题实际上前面已经说了,有硬件消抖肯定对CPU占用最少,软件消抖当然就是尽量不要用些没用的语句,分配好时序
2.如何消抖
3.是不是按键都要消抖,不是的话,哪些需要消抖,哪些不需要消抖
机器人五级

青少年机器人技术等级考试理论综合试卷(五级)分数:100 题数:30一、单选题(共20题,共80分)正常情况下,ESP32 WROOM 模块的工作电压是?()1.A. 3.0VB. 3.3VC. 5VD. 7~12V试题编号:20220608102413012试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:ESP32 for Arduino函数ledcSetup(channel,freq,bit_num)中,freq的含义是?()2.A. 设置PWM的频率B. 设置PWM的分辨率C. 设置PWM的输出通道号D. 设置PWM的占空比试题编号:20220608102413528试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:3UART通信的起始位是?().A. 高电平B. 低电平C. 上升沿D. 下降沿试题编号:20220608102413669试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:下列程序通过串口分别发送数据,采用偶校验,对应的校验位数值分别为?()4.A. 0 0B. 1 1C. 0 1D. 1 0试题编号:20220608102414201试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:Serial类库的下列成员函数中,用于返回串口接受缓冲区中字节数的是?()5.A. begin()B. find()C. available()D. length()试题编号:20220608102413967试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:ESP32 for Arduino采用DAC外设进行模拟输出时,所对应的函数是?()6.A. adcWrite()B. dacWrite()C. analogWrite()D. ledcWrite()试题编号:20220608102413607试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:7ESP32 for Arduino,电路如图所示,当按键释放时触发中断,对应的中断触发模式是?().A. ONLOWB. ONHIGHC. RISINGD. FALLING试题编号:20220608102414296试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:下列程序执行后,串口监视器显示的相应内容为?()8.A. ABB. ABCC. 2D. 3试题编号:20220608102413935试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:74HC595移位寄存器芯片级联时,与引脚Q7’连接的引脚是?()9.A. SH_CPB. ST_CPC. DsD. Q0试题编号:20220608102413638试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:下列选项中,ESP32WROOM模组所不具备的外设是?()1.A. GPIOB. UARTC. 霍尔传感器D. 姿态传感器试题编号:20220608102413199试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:程序执行后val的值是?()11.A. 0x18B. 0x11C. 0x30D. 0x0试题编号:20220608102414045试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:标准的ASCII码表示字符的位数是?()12.A. 4 bitB. 7 bitC. 8 bitD. 16 bit试题编号:20220608102413121试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:1ESP32 for Arduino程序如下,串口监视器显示的值为?()3.A. 6B. 8C. 12D. 24试题编号:20220608102413857试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:1 4 .ESP32 for Arduino采用LEDC方式进行模拟输出时,向指定通道输出模拟信号的函数是?()A. ledcSetup()B. ledcAttachPin()C. analogWrite()D. ledcWrite()试题编号:20220608102413497试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:15.ESP32 for Arduino中,程序Serial.printf()中表示十进制整数输出的格式字符为?()A. %oB. %dC. %xD. %f试题编号:20220608102414014试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:0xF<<2的值是?()16.A. 0x3CB. 0x1EC. 0x3D. 0x7试题编号:20220608102413904试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:1有关按键消抖下列说法错误的是?()7.A. 按键抖动是因为按键内金属簧片在接触瞬间是一个连续通断的过程。
Verilog写的按键消抖程序

前几天看了特权同学用Verilog写的按键消抖程序,感觉很经典。
在这里将程序贴出来分享一下。
module lcd_button2(clk,rst,seg,wei,sw1,sw2,sw3,sw4);//按键按下,数码管依次显示0-9input clk;input rst;input sw1,sw2,sw3,sw4;output [3:0] wei;output[7:0] seg;reg [7:0] seg;reg [3:0] wei;integer num;initial beginnum = 0;endreg[3:0] key_rst;always @(posedge clk or negedge rst)if(!rst)key_rst <= 4'b1111;elsekey_rst <= {sw4,sw3,sw2,sw1};reg[3:0] key_rst_r;always @(posedge clk or negedge rst)if(!rst)key_rst_r <= 4'b111;elsekey_rst_r <= key_rst;wire[3:0] key_an = key_rst_r & (~key_rst);reg[19:0] cnt;always @(posedge clk or negedge rst)if(!rst)cnt <= 0;else if(key_an) cnt <= 0;else cnt <= cnt+1'b1;reg [3:0] low_sw;always @(posedge clk or negedge rst)if(!rst)low_sw <= 4'b1111;else if(cnt==10'hfffff)low_sw <= {sw4,sw3,sw2,sw1};reg[3:0] low_sw_r;always @(posedge clk or negedge rst)if(!rst)low_sw_r <= 4'b1111;elselow_sw_r <= low_sw;wire [3:0] led_ctrl = low_sw_r[3:0] & (~low_sw[3:0]);reg d1,d2,d3,d4;always @(posedge clk or negedge rst)if(!rst) begind1 <= 0;d2 <= 0;d3 <= 0;d4 <= 0;endelse beginif(led_ctrl[0]) beginnum <= num+1;if(num==9)num <= 0;endendalways @(posedge clk ) beginwei <= 4'b1111;case(num)0: seg <= 8'hfc;1: seg <= 8'h60;2: seg <= 8'hda;3: seg <= 8'hf2;4: seg <= 8'h66;5: seg <= 8'hb6;6: seg <= 8'hbe;7: seg <= 8'he0;8: seg <= 8'hfe;9: seg <= 8'hf6;default: seg <= 8'h02;endcaseendendmodule参考了特权的代码。
四位拨动开关控制数码管显示系统设计书

四位拨动开关控制数码管显示系统设计书1.设计背景单片机具有人机对话功能,开关,键盘是实现人机对话的主要输入设备,也是最常用的设备,通过它能发出各种控制指令和数据到单片机。
而二极管,数码管,LED显示器是常用的输出设备,单片机接受一系列指令到,执行一定功能后,可通过这些设备输出。
为了更好的掌握单片机的硬件特性以及用汇编语言进行编程设计,我们运用目前所学的知识,来设计了一个单片机最小系统——用拨码开关控制数码管显示系统。
2.设计方案2.1方案一使用单片机P1口,由4位DIP开关从P1口低四位输入,高四位输出,译码部分采用74LS247译码器,送往共阳极数码管显示。
本方案编程简单,占用I/O端口少,但电路设计较复杂,硬件增多,成本增高。
2.2方案二本方案的译码部分由单片机编程实现,P1口接共阳数码管,由4位DIP开关从P0口低四位输入,经软件译码,送往P1口,在数码管显示相应的数字。
由于译码部分采用了软件实现,省去了译码电路,成本降低,电路设计简单,但编程较方案一复杂,而且占用I/O端口多,占用系统资源。
综合考虑,确定采用方案二实现。
3.方案实施3.1输入输出电路设计该设计以AT89S52单片机为核心部件,AT89S52单片机有4个双向的8位并行I/0口,分别记为P0、P1、P2和P3口。
本次设计中主要使用P0作为输入口,P1作为输出口。
P0口:P0口为一个8位漏级开路双向I/O口,每个脚可吸收8TTL门电流。
当P1口的管脚第一次写1时,被定义为高阻输入。
P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。
在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口是一个部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL 门电流。
P1口管脚写入1后,被部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于部上拉的缘故。
4位数码管计时器程序
/******************************************************************************************* **/#include<STC12C2052AD.H>//STC头文件/******************************************************************************************* ***///“程序开发调试设置项”#define DY_LI 9 //设置LED显示的亮度(值域:~9)#define DY_DELAY 12 //设置每一个点显示的时间长度(~20)/******************************************************************************************* ***/sbit DY_LED1_H1 =P3 ^ 0; //设置LED点阵屏连接的I/O口sbit DY_LED1_H2 =P3 ^ 1; //设置LED点阵屏连接的I/O口sbit DY_LED1_H3 =P3 ^ 2; //设置LED点阵屏连接的I/O口sbit DY_LED1_H4 =P3 ^ 3; //设置LED点阵屏连接的I/O口sbit DY_LED1_L1 =P1 ^ 0; //设置LED点阵屏连接的I/O口sbit DY_LED1_L2 =P1 ^ 1; //设置LED点阵屏连接的I/O口sbit DY_LED1_L3 =P1 ^ 2; //设置LED点阵屏连接的I/O口sbit DY_LED1_L4 =P1 ^ 3; //设置LED点阵屏连接的I/O口sbit DY_LED1_L5 =P1 ^ 4; //设置LED点阵屏连接的I/O口sbit DY_LED1_L6 =P1 ^ 5; //设置LED点阵屏连接的I/O口sbit DY_LED1_L7 =P1 ^ 6; //设置LED点阵屏连接的I/O口sbit DY_LED1_L8 =P1 ^ 7; //设置LED点阵屏连接的I/O口//sbit DY_BEEP =P2 ^ 2; //扬声器//sbit DY_KEY1 =P0 ^ 2; //按键(M键)(连接在P1.3和P0.2,读P0.2为低时表示有按键动作)//sbit DY_KEY2 =P3 ^ 0; //按键(+键)(连接在P4.6和P3.0,读P3.0为低时表示有按键动作)//sbit DY_KEY3 =P3 ^ 6; //按键(-键)(连接在P2.4和P3.6,读P3.6为低时表示有按键动作)#define DY_P1M0SET 0x00 //设置I/O口工作方式//00000000(左到右,高到低位)#define DY_P1M1SET 0x00 //设置I/O口工作方式//00101000#define DY_P3M0SET 0x00 //设置I/O口工作方式//00000000#define DY_P3M1SET 0xff //设置I/O口工作方式//10010100data unsigned char TIME_DD,TIME_MO,TIME_YY,TIME_WW,TIME_HH,TIME_MM,TIME_SS,ty;//设置日、月、年、周、时、分、秒和温度存放区data unsigned char cou = 0; // 软计数器,对ms时基信号累加到sdata unsigned char bn;//扫描映射全局变量data unsigned char KEY_BIT = 0;//按键值data unsigned char DY_PWM;//显示亮度data unsigned char DY_PWM2;//显示暂存unsigned char code disdata[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f //无小数点数码管段码表(0~9)};/******************************************************************************************* **/void delay (unsigned int a){ // 用于点扫描的延时unsigned int i;while( --a != 0){for(i = 0; i < DY_DELAY; i++);}}/******************************************************************************************* **/void delay1ms (unsigned int a){ // 1ms延时程序(MHz 10倍于单片机速度时)unsigned int i;while( --a != 0){for(i = 0; i < 600; i++);}}/******************************************************************************************* **/void dis_off (void){P1 = ~DY_P1M1SET; //关所有显示P3 = ~DY_P3M1SET;delay(10-DY_PWM);}/******************************************************************************************* **/void displayHH1 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H1 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H1 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H1 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H1 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();i = d & 0x10;if(i == 0x10){DY_LED1_H1 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H1 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H1 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H1 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void displayHH2 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H2 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H2 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H2 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H2 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();i = d & 0x10;if(i == 0x10){DY_LED1_H2 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H2 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H2 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H2 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void displayHH3 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H3 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H3 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H3 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H3 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();i = d & 0x10;if(i == 0x10){DY_LED1_H3 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H3 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H3 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H3 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void displayHH4 (unsigned char d){ //第列横向显示程序unsigned char i;i = d & 0x01;if(i == 0x01){DY_LED1_H4 = 1;DY_LED1_L1 = 0;}delay(DY_PWM);dis_off();i = d & 0x02;if(i == 0x02){DY_LED1_H4 = 1;DY_LED1_L2 = 0;}delay(DY_PWM);dis_off();i = d & 0x04;if(i == 0x04){DY_LED1_H4 = 1;DY_LED1_L3 = 0;}delay(DY_PWM);dis_off();i = d & 0x08;if(i == 0x08){DY_LED1_H4 = 1;DY_LED1_L4 = 0;}delay(DY_PWM);dis_off();if(i == 0x10){DY_LED1_H4 = 1;DY_LED1_L5 = 0;}delay(DY_PWM);dis_off();i = d & 0x20;if(i == 0x20){DY_LED1_H4 = 1;DY_LED1_L6 = 0;}delay(DY_PWM);dis_off();i = d & 0x40;if(i == 0x40){DY_LED1_H4 = 1;DY_LED1_L7 = 0;}delay(DY_PWM);dis_off();i = d & 0x80;if(i == 0x80){DY_LED1_H4 = 1;DY_LED1_L8 = 0;}delay(DY_PWM);dis_off();}/******************************************************************************************* **/void diplay_data (unsigned char l,unsigned char d){switch (l){//显示的列位置case 1://displayHH1(d); //将显示数据送入break;//case 2://displayHH2(d); //将显示数据送入break;//case 3://displayHH3(d); //将显示数据送入break;//case 4://displayHH4(d); //将显示数据送入break;//}}/******************************************************************************************* **/void init (void){ //上电初始化P1M0 = DY_P1M0SET;P1M1 = DY_P1M1SET;P3M0 = DY_P3M0SET;P3M1 = DY_P3M1SET;////dis_off();DY_PWM = DY_LI;////TMOD = 0x11; // 定时/计数器,1工作于方式TH0 = 0x3c; // 预置产生ms时基信号EA = 1; // 开总中断ET0 = 1; // 定时/计数器允许中断TR0 = 1; // 开闭定时/计数器//////TIME_DD = 18; //时间在首次使用的值,之后会在EEPROM自动记录上一天的值//TIME_MO = 5; //初始时间:年月日周一,时分秒//TIME_YY = 9;//TIME_WW = 1;//TIME_HH = 22;//TIME_MM = 13;//TIME_SS = 40;}/******************************************************************************************* **/void main (void){ //主程序init();while (1){diplay_data (1,disdata[TIME_MM/10]);diplay_data (2,disdata[TIME_MM%10]);diplay_data (3,disdata[TIME_SS/10]+0x80);diplay_data (4,disdata[TIME_SS%10]+0x80);}}/******************************************************************************************* ***/void tiem0(void) interrupt 1{ // T/C0中断服务程序(产生ms时基信号)cou++; // 软计数器加if(cou > 19){ // 计数值到(1s)cou = 0; // 软计数器清零TIME_SS++; // 秒计数器加(进位ms*100=1s)if(TIME_SS > 59){ // 秒计数值到TIME_SS = 0; // 秒计数器清零TIME_MM++; // 分计数器加(进位s=1m)if(TIME_MM > 59){ // 分计数到TIME_MM = 0; // 分计数器清零TIME_HH++; // 时计数器加(进位m=1h)if(TIME_HH > 23){ // 时计数到TIME_HH = 0; // 时计数器清零}}}}TH0 = 0x3c; // 重置定时常数TL0 = 0xb0;}/******************************************************************************************* ***//*************************************************************/*************************************************************/。
arduino四位数码管的点
arduino四位数码管的点Arduino是一款开源硬件平台,能够轻松实现各种电子设备的控制。
其中,四位数码管在Arduino项目中被广泛应用,它能够显示数字、字符和符号等内容,具有直观、方便的特点。
在本文中,我将一步一步回答关于Arduino四位数码管上的点的问题,帮助读者更好地了解和应用这一功能。
首先,让我们简单介绍一下Arduino四位数码管的点。
四位数码管是由四个七段显示器组成的,每个七段显示器包含七个可控发光二极管(LED),能够显示数字0-9和一些常用的字母、符号。
而在四位数码管中的每个数字、字母或符号的显示位置上,都会有一个小小的点,用于提供额外的信息显示。
那么,接下来的问题就是:如何在Arduino中控制四位数码管上的点?为了回答这一问题,我们需要进行一系列的步骤。
第一步:准备材料要控制Arduino四位数码管上的点,我们需要准备以下材料:1. Arduino开发板2. 四线四位数码管3. 面包板4. 杜邦线5. 220欧姆电阻(可选)第二步:连接电路首先,在面包板上连接Arduino开发板和四位数码管。
将杜邦线连接到Arduino开发板的数字引脚,并将其逐一连接到四位数码管的控制引脚上。
根据具体的接线方式,你可能需要使用220欧姆电阻来限制电流,以保护Arduino和四位数码管。
第三步:编写代码在Arduino集成开发环境(IDE)中,打开一个新的项目,并编写代码来控制四位数码管上的点。
代码的实现方式将取决于你使用的具体型号和规格。
以下是一个示例代码,它通过Arduino的数字引脚来控制四位数码管上的点:c++定义数码管引脚int a = 2;int b = 3;int c = 4;int d = 5;int dp = 6;void setup() {设置引脚为输出模式pinMode(a, OUTPUT);pinMode(b, OUTPUT);pinMode(c, OUTPUT);pinMode(d, OUTPUT);pinMode(dp, OUTPUT);}void loop() {控制引脚输出高电平(点亮数码管上的点)digitalWrite(dp, HIGH);delay(1000); 等待1秒钟控制引脚输出低电平(熄灭数码管上的点)digitalWrite(dp, LOW);delay(1000); 等待1秒钟}在上述代码中,我们通过设置数字引脚为输出模式,并通过控制`dp`引脚的电平来点亮或熄灭四位数码管上的点。
数码管显示4×4键盘矩阵按键实验
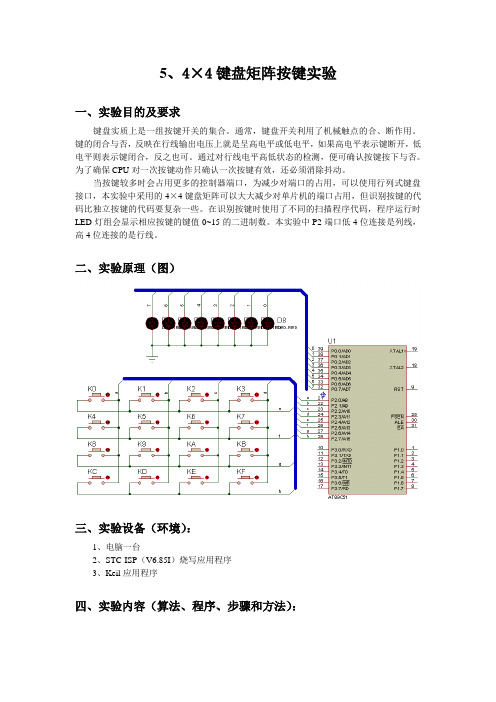
5、4×4键盘矩阵按键实验一、实验目的及要求键盘实质上是一组按键开关的集合。
通常,键盘开关利用了机械触点的合、断作用。
键的闭合与否,反映在行线输出电压上就是呈高电平或低电平,如果高电平表示键断开,低电平则表示键闭合,反之也可。
通过对行线电平高低状态的检测,便可确认按键按下与否。
为了确保CPU对一次按键动作只确认一次按键有效,还必须消除抖动。
当按键较多时会占用更多的控制器端口,为减少对端口的占用,可以使用行列式键盘接口,本实验中采用的4×4键盘矩阵可以大大减少对单片机的端口占用,但识别按键的代码比独立按键的代码要复杂一些。
在识别按键时使用了不同的扫描程序代码,程序运行时LED灯组会显示相应按键的键值0~15的二进制数。
本实验中P2端口低4位连接是列线,高4位连接的是行线。
二、实验原理(图)三、实验设备(环境):1、电脑一台2、STC-ISP(V6.85I)烧写应用程序3、Keil应用程序四、实验内容(算法、程序、步骤和方法):#include<STC15F2K60S2.h> //此文件中定义了STC15系列的一些特殊功能寄存器#include"intrins.h"#define uint unsigned int#define uchar unsigned charuchar code dsy_code[]={0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x0A,0x0B,0x0C,0x0D,0x0E,0x0 F,0xff};uchar Pre_keyno=16,keyno=16;void delayMS(char x){uchar i;while(x--)for(i=0;i<120;i++) ;}void keys_scan(){uchar tmp;P2=0x0f;delayMS(5);tmp=P2^0x0f;switch(tmp){case 1:keyno=0;break;case 2:keyno=1;break;case 4:keyno=2;break;case 8:keyno=3;break;default:keyno=16;}P2=0xf0;delayMS(5);tmp=P2>>4^0x0f;switch(tmp){case 1:keyno+=0;break;case 2:keyno+=4;break;case 4:keyno+=8;break;case 8:keyno+=12;break;}}main(){P0=0x00;while(1){P2=0xf0;if(P2!=0xf0)keys_scan();if(Pre_keyno!=keyno){P0=~dsy_code[keyno];Pre_keyno=keyno;}delayMS(50);}}五、实验结论(结果):本实验实现了XXX功能,核心算法采用了XXX的方式,达到了预期目的。
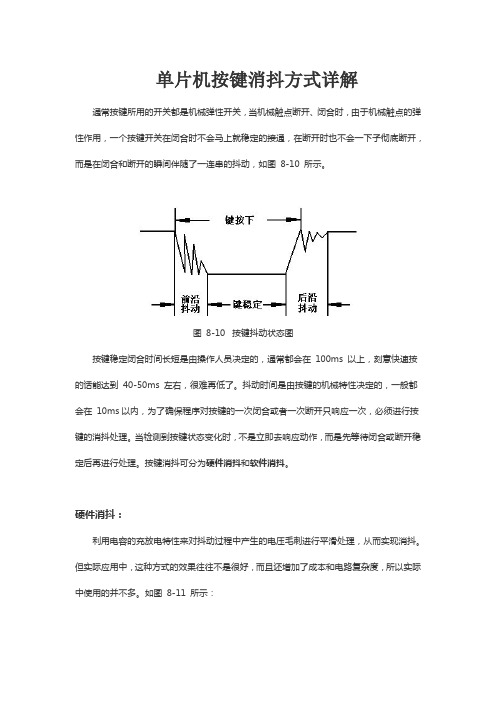
单片机按键消抖方式详解
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E };
void delay(); void main(){
程序如下: #include <reg52.h>
sbit ADDR0 = P1^0; sbit ADDR1 = P1^1; sbit ADDR2 = P1^2; sbit ADDR3 = P1^3; sbit ENLED = P1^4; sbit KEY1 = P2^4; sbit KEY2 = P2^5; sbit KEY3 = P2^6; sbit KEY4 = P2^7;
KeySta = 1; } else{
//其它情况则说明按键状态尚未稳定,则不对 KeySta 变量值进行更新 } } 这个算法是我们在实际工程中经常使用按键所总结的一个比较好的方法,介绍给大家,
今后都可以用这种方法消抖了。当然,按键消抖也还有其它的方法,程序实现更是多种多样,
大家也可以再多考虑下其它的算法,拓展下思路。
那么消抖操作所需要的延时该怎么处理呢?
举个例子:我们启用一个定时中断,每 2ms 进一次中断,扫描一次按键状态并且存储 起来,连续扫描 8 次后,看看这连续 8 次的按键状态是否是一致的。8 次按键的时间大 概是 16ms,这 16ms 内如果按键状态一直保持一致,那就可以确定现在按键处于稳定的 阶段,而非处于抖动的阶段,如图 8-12。
keybuf = (keybuf<<1) | KEY4; //连续 8 次扫描值都为 0,即 16ms 内都只检测到按下状态时,可认为按键已按下 if (keybuf == 0x00){
宽电压四位数码管显示模块产品使用手册
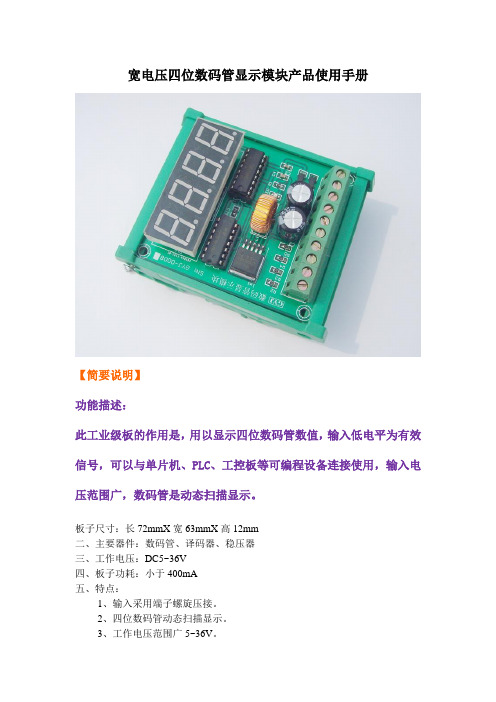
宽电压四位数码管显示模块产品使用手册【简要说明】功能描述:此工业级板的作用是,用以显示四位数码管数值,输入低电平为有效信号,可以与单片机、PLC、工控板等可编程设备连接使用,输入电压范围广,数码管是动态扫描显示。
板子尺寸:长72mmX宽63mmX高12mm二、主要器件:数码管、译码器、稳压器三、工作电压:DC5~36V四、板子功耗:小于400mA五、特点:1、输入采用端子螺旋压接。
2、四位数码管动态扫描显示。
3、工作电压范围广5~36V。
4、输入口可以和单片机IO口直接连接无需驱动。
5、工作稳定,功耗低。
6、输入电压端具有防接反功能,电源接反不会烧坏板子。
7、可以和72MM卡槽板配合安装在DIN导轨上。
【标示说明】【接线说明】【真值表说明】【单片机应用例程】应用接线图/********************************************************************汇诚科技实现功能:宽电压四位数码管显示模块测试例程使用芯片:STC89C52RC晶振:12MHZ编译环境:Keil作者:zhangxinchunleo网站:淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!显示效果:四位数码管分别显示1358*********************************************************************/#include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************初始定义*********************************************************************/code uchar seg7code[10]={ 0xF0,0xFE,0xFD,0xFC,0xFB,0xFA,0xF9,0xF8,0xF7,0xF6}; //显示段码数码管字跟uchar wei[4]={0XEf,0XDf,0XBf,0X7f}; //位的控制端/********************************************************************延时函数*********************************************************************/void delay(uchar t){uchar i,j;for(i=0;i<t;i++){for(j=13;j>0;j--);{ ;}}}/********************************************************************显示函数*********************************************************************/void Led(int date) //显示函数{/*****************数据转换*****************************/uint z,x,c,v;z=date/1000; //求千位x=date%1000/100; //求百位c=date%100/10; //求十位v=date%10; //求个位P2=0XFF;P0=seg7code[z];P2=wei[0];delay(80);P2=0XFF;P0=seg7code[x];P2=wei[1];delay(80);P2=0XFF;P0=seg7code[c];P2=wei[2];delay(80);P2=0XFF;P0=seg7code[v];P2=wei[3];delay(80);P2=0XFF;}/********************************************************************主函数*********************************************************************/ void main(){{int display_date=1358; //定义并赋值要显示的数据while(1){Led(display_date);//调用显示函数显示数据display_date}}}/********************************************************************结束*********************************************************************/ 【原理图】【元件清单】【PCB图】【实物图片展示】【模块加装壳体效果图】。
4位拨动开关控制数码管显示系统

课程设计说明书课程名称:单片机技术原理及应用设计题目:4位拨动开关控制数码管显示系统院系:电子信息与电气工程学院学生姓名:学号:专业班级:指导教师:2012年5月18 日课程设计任务书4位拨动开关控制数码管显示系统设计摘要:以AT89S52芯片为核心,用7805、桥堆、拨动开关等器件设计一个控制电路,实现由4位拨动开关控制共阳极数码管显示系统的设计。
电路由电源模块、复位模块、时钟模块等。
它由5V直流电源供电,用拨动开关的低四位为输入,控制输出端数码管显示器的输出。
用编程语言编写程序,系统能够实现如下功能:上电后数码管默认显示为“8”,调整4位拨动开关按二进制输入,按确定键后数码管显示对应的数字“0”-“F”。
关键词:4位拨位开关;AT89S52芯片;共阳数码管;目录1.设计背景 (1)1.1.单片机设计背景 (1)1.2.设计目的 (1)2.设计方案 (1)2.1方案一 (1)2.2方案二 (1)3.方案实施 (2)3.1单片机的基本结构 (3)3.2硬件模块电路 (3)3.3软件程序设计 (6)4.结果与讨论 (8)4.1结果 (8)4.2讨论 (9)5.收获与致谢 (9)6.参考文献 (9)7.附件 (10)1. 设计背景1.1单片机设计背景目前单片机渗透到我们生活的各个领域。
导弹的导航装置,飞机上各种仪表的控制,计算机的网络通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能IC卡,民用豪华轿车的安全保障系统,录像机、摄像机、全自动洗衣机的控制,以及程控玩具、电子宠物等等,这些都离不开单片机。
更不用说自动控制领域的机器人、智能仪表、医疗器械了。
因此,单片机的学习、开发与应用将造就一批计算机应用与智能化控制的科学家、工程师。
1.2设计目的在理论学习的基础上,通过完成一个单片机多种资源应用并具有综合功能的小系统目标板的设计与编程应用,能够增强我们理论联系实际的能力,进一步熟练相关专业基础知识的综合应用,提高实际动手能力和设计能力。
arduino四位数码管的点 -回复

arduino四位数码管的点-回复关于Arduino四位数码管的点,以下是一篇回答该主题的文章。
标题:Arduino四位数码管的点:具体操作步骤引言:Arduino是一种开源的电子平台,可以用于开发各种项目。
在很多电子项目中,数码管是一种常见的显示设备。
而四位数码管则是常用的一种数码管类型。
本文将一步一步介绍Arduino中如何使用这种具有点的四位数码管。
第一部分:材料准备首先,我们需要准备一些必要的材料才能开始使用Arduino四位数码管。
你将需要以下物品:1. Arduino开发板2. 四位数码管(带有点的)3. 杜邦线(用于连接数码管与Arduino)4. 面包板(用于连接电路)5. 220欧姆电阻(用于保护数码管)6. 电源(如9V电池或者USB线连接计算机)第二部分:电路连接接下来,我们将连接电路,使得Arduino可以控制四位数码管显示。
请按照以下步骤进行连接:1. 将Arduino与面包板连接,确保它们的电源接口相连。
2. 在面包板上连接220欧姆电阻,其中一个引脚与数字引脚连接,另一个引脚通过杜邦线与数码管的共阴极引脚相连。
3. 将数码管的四个分阴极引脚分别与Arduino的数字引脚相连。
根据你的连接方式,可以使用杜邦线或者面包板进行连接。
4. 最后,将数码管的对应段与Arduino的数字引脚连接。
第三部分:编程一旦电路连接完成,我们可以编写Arduino代码,以控制四位数码管的显示。
以下是编写代码的步骤:1. 打开Arduino集成开发环境(IDE)。
2. 在IDE中,创建一个新的项目。
3. 引入数码管库,以便在代码中使用库的方法和功能。
4. 在setup()函数中,设置数码管的数字引脚作为输出引脚。
5. 在loop()函数中,编写代码以实现数码管显示不同的数字和字符。
6. 通过使用库中的函数,控制数码管的每个段的亮灭,实现所需的显示效果。
7. 编译和上传代码到Arduino开发板。
四位LED数码管编程

设计要求:一个基于单片机89S51的可编程定时器的程序,定时器由4个8段数码管显示,可以设置分和秒定时。
可以同时对四路控制对象进行定时控制,外部控件可以用于选择控制对象,设置定时,对定时进行暂停,重置等控制。
#include <AT89X52.H>//宏定义#define uchar unsigned char#define uint unsigned int#define ulong unsigned long int/****************************************************************************** TH0和TL0是计数器0的高8位和低8位计数器,计算办法:TL0=(65536-C)%256; ** TH0=(65536-C)/256,其中C为所要计数的次数即多长时间产生一次中断;TMOD是计数器** 工作模式选择,0X01表示选用模式1,它有16位计数器,最大计数脉冲为65536,最长时** 间为1ms*65536=65.536ms*******************************************************************************/#define V_TMOD 0x01 //工作方式1#define V_TH0 0x3C //50ms延时常数C=50000//0XDC#define V_TL0 0xB0 //50ms延时常数C=50000 /0X58 //#define V_TH1 0xFF //5ms延时常数C=5000 //0XDC//#define V_TL1 0xFB //5ms延时常数C=5000 /0X58#define V_TH1 0xDC //1ms延时常数C=1000 //0XDC#define V_TL1 0x58 //1ms延时常数C=1000 /0X58#define MAXFUN 6 //功能切换,表示最多的功能状态,sbit k10=P1^0;//sbit BEEP = P3^7; //蜂鸣器驱动线----------------请修改为sbit BEEP =P0^4;uchar bee; //蜂鸣器01开关uchar key; //键顺序吗uchar fun=10; //功能状态, <= MAXFUNuchar it0=0,it1; //Timer0中断计数uchar text=0; //数字//uchar text_ctrl[4]={0xFE,0xFD,0xFB,0xF7}; //位选通值uchar text_ctrl[4]={0xE,0xD,0xB,0x7};//位选通值, 00001110, 00001101, 00001011, 00000111//uchar text_code[11]={ 0x28, 0x7E, 0xA2, 0x62, 0x74, 0x61, 0x21, 0x7A, 0x20,0x60,0xff};//0,1,2,3,4,5,6,7,8,9,关显示,数码管码表,高电平有效//uchar text_code[17]={0x28,0x7e,0xa2,0x62,0x74,0x61,0x21,0x7a,0x20,0x60,0x30,0x25,0xa9,0x26,0xa1,0xb1};//数码管代码uchar text_code[11]={ 0xFC, 0x60, 0xDA, 0xF2, 0x66, 0xB6, 0xBE, 0xE0,0xFE, 0xF6,0xff};//0,1,2,3,4,5,6,7,8,9,关显示,数码管码表,高电平有效uchar text_index=0; //当前显示第几个uchar dis_buf[4]; //显示缓存uchar refresh=0; //刷新否T1蜂鸣uchar min=0; //minutesuchar sec=0; //sccondsuchar hour=0; //sccondsuchar onsetup=0;uchar keydown0=0,keydown1=0;uchar data PWM=0xFf ;//PWM值增加,则占空比减小,LED 灯渐暗。
4位数码管循环

4位数码管循环4位数码管是一种常见的显示设备,它由4个七段数码管组成,可以显示0-9的数字。
这种设备广泛应用于各种计数、计时、计量和显示等场合。
本文将从不同角度介绍4位数码管的循环特性及其应用。
一、4位数码管的循环原理4位数码管的循环原理是通过逐个切换数码管的工作状态来实现的。
每个数码管在一段时间内显示一个数字,然后迅速切换到下一个数码管,如此循环往复。
通过快速切换的方式,人眼会产生视觉暂留效应,从而形成连续显示的效果。
二、4位数码管的应用领域1. 计数器:4位数码管可以用于制作计数器,如电子钟、秒表等。
它可以精确显示时间,方便人们进行时间的观测和计量。
2. 温度计:通过传感器获取温度数据,并将其转化为数字信号后,可以用4位数码管显示当前的温度值。
3. 汽车仪表盘:4位数码管可以用于显示汽车的速度、转速、油量等信息。
它可以直观地告知驾驶员车辆的状态。
4. 电子秤:通过传感器检测物体的重量,并将其转化为数字信号后,可以用4位数码管显示物体的净重。
5. 电子游戏:4位数码管可以用于制作各种电子游戏设备,如数独、俄罗斯方块等。
它可以实时显示游戏的得分、时间等信息,提升游戏体验。
6. 电子商标:4位数码管可以用于制作电子商标,如超市货架上的价格显示器,方便顾客了解商品的价格信息。
三、4位数码管的优势1. 显示效果好:4位数码管采用七段显示技术,可以显示数字、字母和符号等信息,显示效果清晰、鲜明。
2. 可读性强:4位数码管的显示字符大、亮度高,可以在远距离或强光环境下清晰可见。
3. 稳定可靠:4位数码管具有较高的抗干扰能力和稳定性,能够在各种环境下正常工作。
4. 使用方便:4位数码管可以通过数字输入接口或串行通信接口进行控制,操作简单、灵活。
四、4位数码管的发展趋势随着科技的不断进步,4位数码管在显示技术和应用领域上也在不断发展。
未来的4位数码管可能具备更高的分辨率、更丰富的显示效果和更强的互动性。
同时,4位数码管也将更广泛地应用于智能家居、智能交通、工业自动化等领域,为人们的生活和工作带来更多的便利和效益。
中国电子学会机器人水平五级考试编程操作题目汇总

主题1:串口交互四位数码管显示装置器件:四位数码管、74HC595串口寄存器。
要求:1、使用74HC595串口寄存器芯片控制四位数码管显示数字,显示的数字在0~9999之间依次循环。
2、相邻数字显示的时间间隔由串口输入数值控制,在串口监视器输入框中输入10~2000间的数值,点击【发送】,输入的数值同步在串口监视器显示,同时四位数码管按照输入的数值以毫秒为单位间隔显示。
3、再次发送不同的数值,数码管显示的时间间隔按照新输入数值随之改变,新输入的数值也同步显示到串口监视器。
4、程序编写时,要求使用数组存储0~9数字信息。
主题2:LED灯交互四位数码管显示装置器件:LED灯、电位器、四位数码管、74HC595串口寄存器。
要求:1、程序控制LED实现呼吸灯效果,即LED灯的亮度在最亮和熄灭之间渐变;2、将LED呼吸灯当前亮度对应的PWM值实时显示四位数码管;3、通过电位器控制LED呼吸灯亮度变化的频率。
旋转电位器,LED呼吸灯的呼吸频率发生变化,四位数码管上的数值的更新速度也随之变化;4、LED呼吸灯达到最亮状态时,对应的PWM值为1023,熄灭时对应的PWM值为0;5、程序编写时,要求使用数组存储0~9数字信息。
主题3:跳动的心器件:8x8LED点阵、74HC595串口寄存器、电位器、LED灯。
要求:使用74HC595串口寄存器芯片控制8x8LED点阵显示大小心形图案,通过电位器调整大小心形图案的切换频率;通过LED亮度的指示当前的切换频率,详细要求如下:1、在8x8LED点阵上分别连续显示大小两个心形图案。
2、通过旋转电位器切换大小心形图案的切换时间在100ms-500ms之间变化。
3、通过LED灯的亮度来指示当前心形图案的切换频率,当切换时间为100ms时,LED灯最亮;当切换时间为500ms时,LED灯熄灭;当切换时间为100ms-500ms之间时,LED灯亮度随之而变化。
202103按键控制数字“3”单步显示通过两个按键控制一位数码管从a至h各段位依次亮灭。