一种电动式轮履复合试验小车行走装置的研制
轮履复合行走机构设计与研究
关键词 : 机器人 ; 轮履复合行走机构 ; 轮履转换机构
中 图分 类号 : T P 2 4 0 引言 文 献标 识 码 : B
D OI : 1 0 . 1 6 6 2 1 / j . c n k i . i s s n l 0 0 1 — 0 5 9 9 . 2 0 1 7 . 1 1 D . 5 7
[ 4 ] 胡 国清 , 忻志 明. v 一 2 2 坠毁事故暴露 出的驾驶舱信息和显示 问题
[ J ] . 国际航空 , 1 9 9 4 ( 5 ) : 6 2 — 6 3 .
螺旋 桨的输 出功率 , 使 两个 涵道螺旋桨产生不 同的推力 , 产生偏 航力矩 , 即可实现偏航操纵 。 ( 3 ) 滚转操纵。水平飞行 时 , 通过调整固定翼 中 2 个涵道螺 旋 桨的晴转 角度 , 使 2个涵道螺旋 桨的晴转角度产生差动 , 从而
( 2 ) 尾部风扇 。“ s Q ” 运 输机尾部风扇设计 为两 自由度可调
动作 根据轮履复合式行走机构 的特点与功能要求 ,提 出一种轮
二者在产生 向后推进的推力的同时,分别产生向上和 向下的分 力, 从而进而实现飞机滚转操纵 。
4 结 论
结构 。这样一方 面是能取代原有 的水 平尾翼和垂直 尾翼 , 实现
“ 动力舵 面” 的作用 , 飞行 器操纵灵 活性更 高 ; 另一方 面是可 以 在垂 直起 降过 程 中多一个动力 输 出点 ,从 而更好地 保持 飞机
的平 衡 。
在 v一 2 2 “ 鱼鹰 ” 的基 础上 , 改进设 计 了一 款“ s Q ” 新概念 垂 直起 降倾转旋翼运输机 。主要是将 v 一 2 2的 2个可倾 转旋翼去 除, 取而代之在固定翼 中嵌入涵道螺旋桨 。 取消原飞行器水平尾
电动轮履两用救援灭火小车的创新设计
电机 均选 择 传 动 比 为 l 行星 减 速 电机 , 率 为 50 6的 功 0
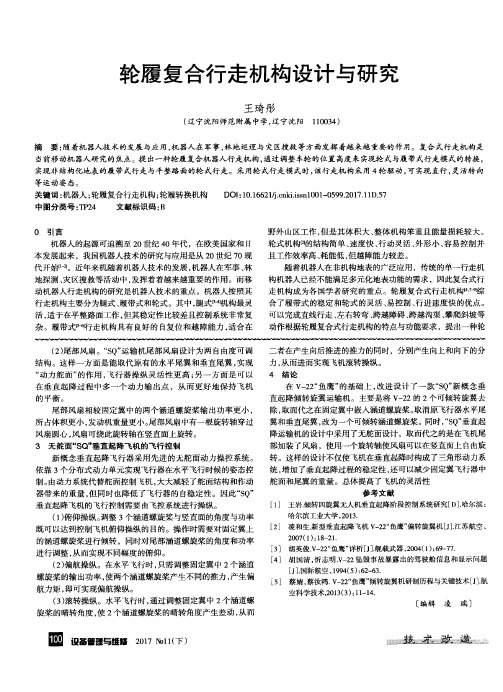
1前 轮 ;. 架 ;. 架 ;. 轴 器 ;. 落 电 机 ; . 2叉 3车 4联 5起
6 转 向 电机 ;. 向 蜗 轮 蜗 杆 ;. 落 蜗 轮 蜗 杆 ; . 7转 8起 9 蜗 轮 轴 ;0 转 向轴 . 1. 图 2 轮 式 行 走 系统 前 轮 示 意 图
过 能 力 和 现 场 环 境 实 时 显 示 功 能 的 电 动 轮 履 两 用 救 援 灭 火 小
三 轮 车 的运 动 原 理 进 行 设 计 , 一 转 向 轮 和 两 驱 动 轮 构 由
成 , 动 轮 采 用 差 速 器 经 一 台 电 机 集 中驱 动 。轮 履 转 换 驱
车 。提 出 小车 的 总 体 设 计 思 想 , 分 别 对 该 小 车 的 行 走 系统 、 并
的 F me i 下 自定 义 串 口通 信 驱 动 示 例 模 板 进 行 二 次 a Ve w
开发的 。 .
考虑传 动系统 效率和行驶路 面 的复杂 性 , 根据 功率 、 力矩 的计算结果 , 用 70W 的无刷 电机 为小车 提供动 选 5
力 ( 额 定 转 速 40转 / n 额 定 扭 矩 为 1 . 2N ・ 。 其 8 mi, 4 9 m)
根 据 小 车 的设 计 要 求 , 履 带 驱 动 轮 为 1 0×5 负 重 其 3 0,
轮 为 中1 8×5 履 带 宽 度 为 1 0 ml , 度 为 38 0 mm; 8 0, 1 T 长 1 0
( ) 程通 信 : 程 通 信 采 用 某 公 司 的 解 决 方 案 , 3远 远 直 接通过 T P I C /P协议 由 Itre 通 信 。 nen t
一种新型的轮履转换行走装置[发明专利]
![一种新型的轮履转换行走装置[发明专利]](https://img.taocdn.com/s3/m/a5e3246d6529647d262852d5.png)
专利名称:一种新型的轮履转换行走装置专利类型:发明专利
发明人:赵江坤,江帆,李伟
申请号:CN202010401331.1
申请日:20200513
公开号:CN111591360A
公开日:
20200828
专利内容由知识产权出版社提供
摘要:本发明的一种新型的轮履转换行走装置,包括车架,轮式行走机构和履带行走机构;履带行走机构,包括车架两侧的履带,每个履带包括一个连接有履带驱动电机的履带驱动轮和三个导向轮,而与履带驱动轮处于同一水平的导向轮上转动安装有导向轮轴,即导向轮轴的转动不会驱动导向轮,导向轮轴上连接有履带变形电机,履带驱动轮和三个导向轮通过三个曲柄连接并形成平行四边形结构,三个曲柄的其中一个为主动曲柄,并与导向轮轴固定,另外两个曲柄为从动曲柄。
本发明即利用了履带行走装置在越障能力方面的优势,也利用了轮式行走装置行进速度快灵活的优点。
不仅能够提高机器人对复杂环境的适应能力,也提高了救援效率。
申请人:中国矿业大学
地址:221116 江苏省徐州市大学路1号
国籍:CN
代理机构:南京经纬专利商标代理有限公司
代理人:石艳红
更多信息请下载全文后查看。
一种自动往返小车教学实训装置[实用新型专利]
![一种自动往返小车教学实训装置[实用新型专利]](https://img.taocdn.com/s3/m/688f53f96c175f0e7cd137ee.png)
专利名称:一种自动往返小车教学实训装置专利类型:实用新型专利
发明人:孙祖保,孙轶烈,王邵旭,龙俊芳,孙舵申请号:CN201220686712.X
申请日:20121213
公开号:CN202929892U
公开日:
20130508
专利内容由知识产权出版社提供
摘要:一种自动往返小车教学实训装置,本实用新型涉及实验器材领域。
包括基础框架、枕木、导轨、小车、直流电机、小车位置传感器、呼叫按钮以及可编程控制器,基础框架上部设有枕木、导轨,导轨上设小车,小车上设触碰块,小车内设直流电机、下部设轮子,轮辐与轮轴中间设置有绝缘体,两个导轨分别与可编程控制器输出端相连,直流电源通过可编程控制器的输出端与导轨连接,直流电机由安装在轮子上的碳刷获取直流电,可编程控制器的输出端控制小车直流电机与直流电源之间接通、断开和送给直流电机的直流电源的正负极倒换,基础框架中部设有通过导线与可编程控制器输入端相连的呼叫按钮和小车位置传感器,本实用新型用于增加实训的趣味性。
申请人:伊春技师学院
地址:153000 黑龙江省伊春市南岔区技校路1号
国籍:CN
更多信息请下载全文后查看。
一种智能小车实验装置和方法[发明专利]
![一种智能小车实验装置和方法[发明专利]](https://img.taocdn.com/s3/m/b413a7c6af45b307e9719766.png)
专利名称:一种智能小车实验装置和方法
专利类型:发明专利
发明人:王岩,张辉,陈燕,张亚,吴磊,黄迪,谈学操,江浩,朱逸轩申请号:CN202010629381.5
申请日:20200624
公开号:CN111673710A
公开日:
20200918
专利内容由知识产权出版社提供
摘要:本发明公开了一种智能小车实验装置和方法,该实验装置包括该履带机构、车架、机械臂、储物台、摄像头、控制模块;履带机构设于车架下部,机械臂、储物台、控制模块设于车架上部,摄像头设于机械臂前部。
本实验装置具有自动识别物块、抓取物块、运输物块、存放物块、自主规划路径等功能,结构简单,采用单片机编程,抓取准确,运行效率高,适用于学生做机器人控制编程的实验。
申请人:嘉兴学院
地址:314001 浙江省嘉兴市南湖区越秀南路56号
国籍:CN
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
叶 装备制造技术曳 2019 年第 08 期
一种电动式轮履复合试验小车行走装置的研制
朱节宏,谢述双,蔡超锐
渊 北海职业学院袁广西 北海 536000冤
摘 要:本文以轮履复合技术的现有研究为切入点袁提出了一种电动式轮履复合试验小车行走装置袁并对该小车行走装 置进行总体设计袁电动零部件的选型设计袁详细的结构设计袁控制线路设计以及小车样机制造袁研究轮履复合技术在纯电 动设备领域实际应用的可能性与可行性遥 试验表明袁样机能够实现独立的轮式行走和履带式行走袁两种行走方式的切换 顺利有效袁具有良好的机动性能和通过能力遥 关键词:电动式曰轮履复合曰行走装置曰研制曰C reo
轮式行走电机驱动功率和பைடு நூலகம்带式行走电机驱动 功率参考计算过程如下遥
轮式行走以设计最高速度 60 km/h 计算袁所需单 个轮毂电机功率 P1 = f自/浊 = 滋mg自/浊 = 0.02 伊 200 伊 9.8 伊 60 000渊/ 3 600 伊 0.87冤 = 750.96 W 渊 其中 f 为 车轮滚动摩擦力曰滋 为摩擦系数袁 取 滋 = 0.02曰自 为速 度曰mg 为车轮所承受的重量曰浊 为电机效率袁 取 浊 = 0.87冤 遥
中图分类号:TU603
文献标识码:A
文章编号:1672-545X(2019)08-0055-03
0 引言
轮履复合指的是机械设备的行走或行驶部分具 有履带式行走和轮胎式行走两种行走机构袁 可随时 根据路况选择变换行走或行驶方式袁或履带式行走袁 或轮胎式行驶遥 近年来袁工程机械轮履复合行走方式 的研究日益深入袁 已出现主要产品有轮履复合式起 重机尧轮履复合挖掘机和轮履复合特种救援装备袁此 外袁随着人工智能与机器人技术的发展进步袁国内轮 履复合式机器人的应用研究袁也开始出现在医学尧救 援尧工业生产尧农业尧林业及消防等领域遥 履带式行走 的优势是支撑面大尧接地比压小尧通过能力强袁轮胎 式行走则具有速度快尧机动性好的特点袁轮履复合袁 就是基于两种行走方式的优势互补袁 使主机设备具 有更强的工况适应能力袁提高工作效率袁更好地满足 不同行业尧 不同地形条件及不同使用人员的工作需 求[1-3]遥 一种电动式轮履复合试验小车行走装置渊 下称 野 轮履复合行走装置冶冤 的研制袁考虑的就是这种电动 轮履复合技术的可能性或可行性袁 为后续实际工程 工业装备的研究和试验做准备遥
4 轮毂电机控制器
5
蓄电池
使用数量 4个 4个 1个 1个 8个
型号规格
规格说明
TGF
轮式机构升降袁行程 500mm袁推力 2000N
HJ004 轮式行走袁双边开档
JU-TGE
轮式转向袁行程 200mm袁 推力 2000N
双驱 电位调速
12-150AH 4 个串联成一组袁共两组
2 轮履复合行走装置的研制过程
1
1 9
2
3 8
45 6 7 1.轮式机构收放机构 2.转向伸缩机构 3.转向轮 4.橡胶履带 5.蓄电池组 6.车架组件 7.电气控制组件 8.履带驱动组件 9.轮毂电机
图 1 轮履复合行走装置总体布局
1.2 轮履复合行走装置的零部件选型设计 该轮履复合行走装置的研制袁 采用的选型电动
部件主要有院轮式机构伸缩电动推杆尧轮式机构转向
1 轮履复合行走装置的总体设计与零部件选 型
1.1 轮履复合行走装置的总体设计 电动式轮履复合试验小车行走装置总体包括轮
式行走部分尧履带式行走部分尧转向机构尧轮式结构 收放驱动部分和车架等袁 轮式行走部分布置在履带 式行走部分内侧袁整车设计自重约为 400 kg遥 该行走 装置可实现履带式行走和轮胎式行走袁 在履带式行 走时袁前后轮式机构通过收放机构收起袁轮胎离地袁 在轮胎式行走时袁 前后轮式机构通过收放机构下放 撑起袁履带离地遥 轮履复合行走装置总体布局袁如图 1 所示遥
电动零部件的初始选型主要以试验小车轻载或 空载条件为参考袁 因为该试验小车研制的目的是为 了验证该电动式轮履复合技术的可行性袁 不做极限 工况的考虑设计袁 部分电动零部件的选型及技术参 数见下表 1遥
表 1 行走装置各零部件选型及技术参数
序号 零部件名称
1
直流电动推杆
2
直流轮毂电机
3 笔式直流电动推杆
2.1 轮履复合行走装置的结构设计 以外购件的形状尺寸及小车总体布局为基础袁自
制轮履复合行走装置的外形尺寸 1 300 mm 伊 1 500 mm 伊 1 400 mm袁整个车架材料为方管尧圆管及薄钢 板拼搭焊接而成遥 轮式行走机构在履带式行走机构 内侧且对称布置袁 轮式行走驱动采用双驱同步控制 轮毂电机袁 轮式转向则由笔式电动推杆驱动的简易 四杆机构组成袁小车转向机构组成如图 2 所示遥
西北海人袁副教授袁硕士袁主要从事电气自动化技术的教学及科研曰蔡超锐渊 1985- 冤 袁男袁广西北海人袁本科袁主要 从事焊工实训的教学与科研遥
55
Equipment Manufacturing Technology No.08袁2019
笔式电动推杆尧电动推杆控制开关尧轮毂电机尧轮毂 电机控制器尧履带行走直流减速电机及控制组件尧橡 胶履带尧蓄电池组及其他控制部件等遥 对于以上电动 零部件袁电动推杆的推力根据整车设计自重选择袁所 以这里主要考虑的是轮式机构行走轮毂电机的功率 和履带式行走减速电机的功率是否满足设计要求遥
收稿日期:2019-05-16 基金项目:2018 年度广西高校中青年教师基础能力提升项目渊 2018KY1185冤 曰北海职业学院野 十三五冶规划 2017 年度科研课
题第二批教改类重点课题渊 2017YJZ06冤 作者简介:朱节宏渊 1984- 冤 袁男袁广西合浦人袁讲师袁机械工程硕士袁主要从事机械设备的设计开发曰谢述双渊 1970-冤 袁女袁广