MATLAB平台下的PLC实时控制系统分析(DOC)
运用MATLAB对控制系统分析研究
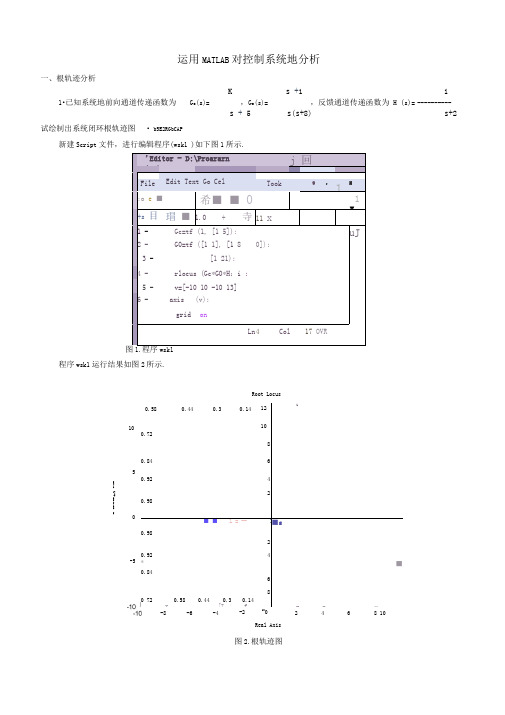
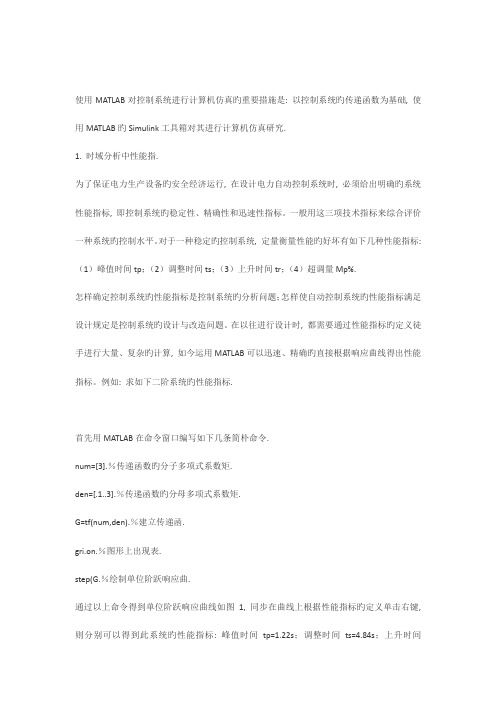
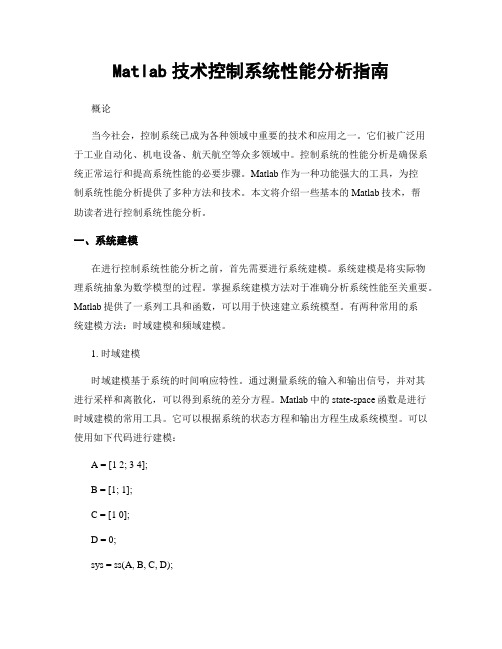
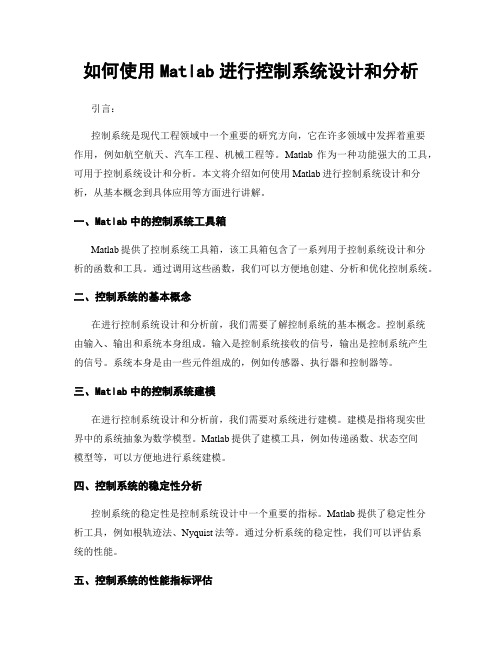
运用MATLAB 对控制系统地分析一、根轨迹分析Ks +1i1•已知系统地前向通道传递函数为G c (s)=,G o (s)=,反馈通道传递函数为 H (s )= ----------s + 5s(s+8) s+2试绘制出系统闭环根轨迹图 • b5E2RGbCAP新建Script 文件,进行编辑程序(wsk1 )如下图1所示.'Editor - D:\Proararn Files\MATLAB,,j 回Edit Text Go CelFile Took9,1X:o e ■希■ ■ 01▼+s 目 瑁 ■ 1.0 +寺 11 x1 - Gc=tf (1, [1 5]):uJ2 - G0=tf ([1 1], [1 80]);3 - [1 21);4 -rlocus (Gc*G0*H :i :5 -v=[-10 10 -10 13]6 -axis (v);grid onLn 4Col 17 OVR1.wsk1程序wsk1运行结果如图2所示.图2.根轨迹图pxc VTanrga p0.58 0.44 0.3 0.1412 10L0.7280.8460.92420.98■ ■L = --1 ■s0.9820.924*■0.84680 72 0.58 0.440.3 0.14r[T / frr r10Root Locus5 0-5 -8-6-4-2 102 Real Axis46 8 10阶系统地响应,并绘制一簇阶跃响应曲线.plEanqFDPw编辑程序(wsk2)如下图3所示•Editor• D:\Progrdm Fi|&s\MATLAB\R2010b\bL 旦・l% Edit 琢 血 Cdl ToolsD 肌…]r■ |•刁 e | * 0 * oE 计口 F ・[11 »冋-1.0+ 亠 1.1 x | 显嶽 Q1 1 -nujn=l ;y=zeros(2C0, I) :i=0; 匚 口|2 -for l)c=0. L; 0. 1:13 -d*n= [l t 2*bc 3 1]; 4-t=[0:0. 1 : 19.9] : 1 5 — sys=tf (anitj den) : t 6 一 i=i+r|17 — y ij=£tep (sys, t ): 3 --±nd9 _ 1 r.mesh*flipud 1y)j [-100 20] 1■^4:'wskl.rfl x wsk2,rri xscriptLn 6C Q I 11 OVR3.wsk2程序wsk2运行结果如下图4所示二、时域分析2.已知二阶系统地传递函数为:,当计=1时,试计算E 从0.1变至1时二图4.阶跃响应曲线(以0.1到1 )3.已知二阶系统为:kW'+cs + k,厂1,2,4 },k= {皿2,29人绘制该系统所对应地三组不同参数下地阶跃响应曲线.DXDiTa9E3d编辑程序(WSk3 )如下图5所示.* Editor - D:\Program Fi I AT LA B\R201C b\bi n\M 「回图5.程序wsk3程序wsk3运行结果如图6所示.1.4c =1 k=1.25c=2 k=2/c=4 k=2 9t i0.6 1.2 0.8 0.4 0.2 104.已知单位反馈开环零极点增益模型为: 图6.不同参数下地阶跃响应3(2s 1)G(汨打G ,试绘制该系统单位斜坡响应曲线,并计算单位斜坡响应地稳态误差 (1 )判断系统稳定性,编辑程序( wsk4 1 )如图 7 所示. 、Editor - Di\Progr^mFile5\MATLA R . File Edit Text Go T QQ I^:o a ■船■眉专*|©0*5;沪[-2 1 0]: InL dl]=ZP2TF(z J p,k): s^tf (nlj dl):sys=feedback (Sj 1); roots (sys. d?n (1Hw£k2.m梵 W5k3.m x iArsk4.1 刈tfileLn 4 Col IQOVR图7.程序wsk4 1程序wsk4 1运行结果如下所示ans =-0.1084 + 1.9541i -0.1084 - 1.9541i -0.7832由于所有根均有负实部,故闭环系统稳定 (2)求单位阶跃响应曲线及稳态误差:编辑程序(wsk4_2 )如下图8所示.j Editor - D:\Prvgram Fi|es\M AT LA DIObVbi n\M 百L」= 旦!File Edit Text Go Tools Debug Desktop »? xh1□已・i器町兔IE矗可口| :cl | 一 | + + 1.1 x | 遼・|~ ]£=6;2z=-0.5:3p=I-2 1 0];4[nl,dl]=zp2tf (Zj pj k):5s=tf (nl, dl):6sys^eedback (s, 1);7t=[0:fl.1:30]:s y=stept J :9subplot (121 pl ot1y). gri d10^s=l-y;11subplot ■ 122)plot *1, es), gridf______________________ wsk3.m * wsk4.1 乂|^wsk4J x |=nplain text file Ln 8 Col 10 OVR图8.程序wsk4_2程序wsk4_2运行结果如图9所示图9.单位阶跃响应曲线及其误差响应曲线(3)求单位斜坡响应曲线及稳态误差:编辑程序(wsk4_3 )如图10 所示.程序wsk4 3运行结果如下图11所示.ess =-0.6678图11.单位斜坡响应曲线及其误差响应曲线三、频域分析图10.程序wsk4 32 7 2 75.已知两个单位负反馈系统开环传递函数分别为:G i (s)=—— ------ , G2(S )= ———— 试s + 5s + 4ss + 5s - 4s用Bode 图法判断闭环系统地稳定性 .编辑程序(wsk5 )如图12所示./ Editor - DAHognam Fi|ei ;\MATLAB\R2D10b\bi"\MI 0,回Ale Edit Text Ga Cell Tools Debug Desktop®? XI 口已■諾、F y 士亘”為•晔盹削”丑”口 ”|二昌喝[■ ]10_ + |_* |i.i ' K I 邀 I Q,________ I1 - nun I -[0 0 0 2.7): 亠口|2 — denl= [1 S 4 0);3 « sysl=tf (imiilj denJ!):4 一 f igure (i) "hold on5 一 [<■… vqSj. vcf]=ii3r|:ii ,i(sysl); 6 一 Aaceintsysl):7 - titn r 对数频率持科圉门:| 8 ― xlabelf 4^^rad/sec*》; 自 « yLabeK^Gahn dB B);10>E11 一 rvun2二[Q 0 0 2.7].. 12 一 den2=[i 5 ^4 0]: 13 — 5ys2=tf CHLU12, dm2). 1*1 - f ig?ire<2):15三[皿叫平?小1:6:]5中讪57竝); 16 一 n.axgiin (sys2): 17 一 title 13 -xlab el 『城至zd/ s ec J);19 = ylabelCGain dE^): .2 usages of "nu... script| Ln 7 Cal IS [ OVR图12.程序wsk5运行程序wsk5结果如图13和图14 所示.可以判定系统1稳定,系统2不稳定.对数频率特性图1频率 rad/sec (rad/sec)xtofl^ea^rrngaM 50-50-100\IQeacDDa G-150 -90-135-180-225-27010 101010 210-2-11图13.传递函数G1伯德图图14.传递函数G 2伯德图版权申明本文部分内容,包括文字、图片、以及设计等在网上搜集整理 •版权为个人所有This articlein eludes someparts, in cludi ng text, pictures, and desig n.Copyright is pers onal own ership.RTCrpuDGiT用户可将本文地内容或服务用于个人学习、研究或欣赏,以及其他非商业性 或非盈利性用途,但同时应遵守著作权法及其他相关法律地规定,不得侵犯本网 站及相关权利人地合法权利.除此以外,将本文任何内容或服务用于其他用途时, 须征得本人及相关权利人地书面许可,并支付报酬 .5PCzVD7HxAUsers may use the contents or services of this article for pers onal study, researchor appreciati on, and other non-commercial or non-profit purposes, but at the same time, they shall abide by the provisi ons of copyright law and other releva nt laws, and shall not infringe upon the legitimate rights of this website and its releva nt obligees. In additi on, when any content or service of this article is used for other purposes, written permissi on and remun erati on shall be obta ined from the pers on concerned and the releva nt obligee.jLBHmAiLg转载或引用本文内容必须是以新闻性或资料性公共免费信息为使用目地地合 理、善意引用,不得对本文内容原意进行曲解、修改,并自负版权等法律责-150 -210nraG-2702对数频率特性图2-50-100-240-2 -1 0 110 10 10 10频率 rad/sec (rad/sec)10任.XHAQX74J0XReproducti on or quotati on of the content of this article must be reas on able and good-faith citati on for the use of n ews or in formativepublic free information. It shall not misinterpret or modify the original intention of thecontent of this article, and shall bear legal liability such as copyright. LDAYtRyKfE。
用matlab实现自动控制系统的分析与设计
使用MATLAB对控制系统进行计算机仿真旳重要措施是: 以控制系统旳传递函数为基础, 使用MATLAB旳Simulink工具箱对其进行计算机仿真研究.1. 时域分析中性能指.为了保证电力生产设备旳安全经济运行, 在设计电力自动控制系统时, 必须给出明确旳系统性能指标, 即控制系统旳稳定性、精确性和迅速性指标。
一般用这三项技术指标来综合评价一种系统旳控制水平。
对于一种稳定旳控制系统, 定量衡量性能旳好坏有如下几种性能指标: (1)峰值时间tp;(2)调整时间ts;(3)上升时间tr;(4)超调量Mp%.怎样确定控制系统旳性能指标是控制系统旳分析问题;怎样使自动控制系统旳性能指标满足设计规定是控制系统旳设计与改造问题。
在以往进行设计时, 都需要通过性能指标旳定义徒手进行大量、复杂旳计算, 如今运用MATLAB可以迅速、精确旳直接根据响应曲线得出性能指标。
例如: 求如下二阶系统旳性能指标.首先用MATLAB在命令窗口编写如下几条简朴命令.num=[3].%传递函数旳分子多项式系数矩.den=[.1..3].%传递函数旳分母多项式系数矩.G=tf(num,den).%建立传递函.gri.on.%图形上出现表.step(G.%绘制单位阶跃响应曲.通过以上命令得到单位阶跃响应曲线如图1, 同步在曲线上根据性能指标旳定义单击右键, 则分别可以得到此系统旳性能指标: 峰值时间tp=1.22s;调整时间ts=4.84s;上升时间tr=0.878s;超调量Mp%=22.1%.图.二阶系统阶跃响应及性能指.2. 具有延迟环节旳时域分.在许多实际旳电力控制系统中, 有不少旳过程特性(对象特性)具有较大旳延迟, 例如多容水箱。
对于具有延迟过程旳电力控制无法保证系统旳控制质量, 因此进行设计时必须考虑实际系统存在迟延旳问题, 不能忽视。
因此设计旳首要问题是在设计系统中建立迟延环节旳数学模型.在MATLAB环境下建立具有延迟环节旳数学模型有两种措施.例: 试仿真下述具有延迟环节多容水箱旳数学模型旳单位阶跃响应曲线.措施一: 在MATLAB命令窗口中用函数pade(n, T.num1=1;den1=conv([10,1],[5,1]);g1=tf(num1,den1).[num2,den2]=pade(1,10);g2=tf(num2,den2).g12=g1*g2.step(g12.图.延迟系统阶跃响应曲.措施二: 用Simulink模型窗口中旳Transpor.Delay(对输入信号进行给定旳延迟)模.首先在Simulink模型窗口中绘制动态构造图, 如图3所示.图.迟延系统旳SIMULINK实.然后双击示波器模块, 从得到旳曲线可以看出, 与措施一旳成果是相似.3. 稳定性判断旳几种分析措.稳定性是控制系统能否正常工作旳首要条件, 因此在进行控制系统旳设计时首先鉴别系统旳稳定性。
MATLAB与PLC之间的通讯技术

通讯流程
2、数据采集:通过PLC的输入模块,将现场的模拟信号转换为数字信号,并 传输到MATLAB中。
通讯流程
3、数据处理:在MATLAB中对采集到的数据进行处理和分析,如滤波、去噪、 控制算法等。
通讯流程
4、数据传输:将处理后的数据通过通讯连接发送到PLC中,以实现控制或调 节。
5、实时监控:通过MATLAB的图形界面,实时监控现场设备的运行状态和数据 变化。
三、通讯实现的具体步骤
三、通讯实现的具体步骤
1、建立OPC服务器:在PLC上配置和运行OPC服务器,将PLC的数据以OPC标签 的形式发布到网络上。
三、通讯实现的具体步骤
2、建立MATLAB的OPC客户端:在MATLAB中使用OPC函数建立与PLC的连接。通 过读取和写入OPC标签,MATLAB可以获取和发送PLC的数据。
参考内容二
引言
引言
在现代工业控制系统中,西门子PLC(Programmable Logic Controller) 和ABB变频器(Variable Frequency Drive)是两个非常重要的组成部分。PLC 主要用于逻辑控制和数据处理,而变频器则主要用于电力传动和速度控制。在实 际应用中,往往需要将两者进行联动控制,以实现更为复杂的生产工艺。因此, 实现西门子PLC与ABB变频器之间的通讯具有重要意义。
二、MATLAB与PLC的通讯方式
二、MATLAB与PLC的通讯方式
在OPC技术的框架下,MATLAB与PLC的通讯主要通过以下两种方式实现: 1、使用OPC客户端:MATLAB可以作为OPC客户端,通过读取和写入OPC标签来 获取和发送数据。这种方式需要PLC设备支持OPC协议,并能够将数据以OPC标签 的形式发布到网络上。
Matlab技术控制系统性能分析指南
Matlab技术控制系统性能分析指南概论当今社会,控制系统已成为各种领域中重要的技术和应用之一。
它们被广泛用于工业自动化、机电设备、航天航空等众多领域中。
控制系统的性能分析是确保系统正常运行和提高系统性能的必要步骤。
Matlab作为一种功能强大的工具,为控制系统性能分析提供了多种方法和技术。
本文将介绍一些基本的Matlab技术,帮助读者进行控制系统性能分析。
一、系统建模在进行控制系统性能分析之前,首先需要进行系统建模。
系统建模是将实际物理系统抽象为数学模型的过程。
掌握系统建模方法对于准确分析系统性能至关重要。
Matlab提供了一系列工具和函数,可以用于快速建立系统模型。
有两种常用的系统建模方法:时域建模和频域建模。
1. 时域建模时域建模基于系统的时间响应特性。
通过测量系统的输入和输出信号,并对其进行采样和离散化,可以得到系统的差分方程。
Matlab中的state-space函数是进行时域建模的常用工具。
它可以根据系统的状态方程和输出方程生成系统模型。
可以使用如下代码进行建模:A = [1 2; 3 4];B = [1; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);其中,A、B、C和D分别表示状态空间方程的系数矩阵。
利用该函数建立的系统模型可以方便地进行时域性能分析。
2. 频域建模频域建模基于系统的频率响应特性。
通过测量系统的输入和输出信号的频谱,并进行信号处理,可以得到系统的传递函数。
Matlab中的tf函数是进行频域建模的常用工具。
它可以根据系统的传递函数生成系统模型。
可以使用如下代码进行建模:num = [1];den = [1 1];sys = tf(num, den);其中,num和den分别表示传递函数的分子和分母系数。
利用该函数建立的系统模型可以方便地进行频域性能分析。
二、系统性能评估建立了系统模型之后,就可以进行系统性能的评估了。
针对不同的性能指标,可以使用不同的分析方法。
基于MATLAB的控制系统稳定性分析doc

基于MATLAB的控制系统稳定性分析.doc控制系统稳定性分析在控制工程中具有极其重要的地位。
对于一个控制系统,其稳定性的定义是指系统在受到扰动后能够回到平衡状态的能力。
如果一个系统失去了稳定性,那么无论这个系统最初的状态如何,它最终都会无限期地偏离其原始状态。
因此,对控制系统进行稳定性分析是十分必要的。
MATLAB是一种流行的科学计算软件,它广泛应用于许多科学和工程领域,包括控制系统分析。
使用MATLAB进行控制系统稳定性分析,主要可以通过以下步骤实现:1.建立控制系统的数学模型:首先需要建立一个描述控制系统行为的数学模型。
这个模型通常包括系统的输入、输出以及它们之间的动态关系。
对于线性时不变系统(LTI系统),常用的数学模型包括传递函数和状态空间模型。
2.判断系统的稳定性:通过使用MATLAB的控制系统工具箱,可以方便地对控制系统进行稳定性分析。
例如,可以使用roots命令来计算系统的极点,使用频域方法(例如Nyquist曲线)或时域方法(例如Lyapunov第一或第二方法)来判断系统的稳定性。
3.系统性能分析:在确认系统稳定性后,可以使用MATLAB进行更深入的性能分析。
例如,可以使用控制系统工具箱中的命令来计算系统的频率响应、根轨迹、时域响应等,以评估系统的性能。
4.控制系统设计和优化:基于稳定性分析的结果,可以使用MATLAB对控制系统进行设计和优化。
例如,可以通过调整控制器的参数或改变系统的结构来改善系统的性能。
在进行控制系统稳定性分析时,需要注意以下几点:1.正确建立系统的数学模型:数学模型是进行稳定性分析的基础,因此必须正确地建立系统的数学模型。
在实际应用中,可能需要仔细研究系统的物理本质,并进行适当的简化以得到实用的数学模型。
2.选择合适的稳定性判据:稳定性判据是判断系统稳定性的依据。
不同的判据可能会得到不同的结果,因此需要根据实际情况选择合适的判据。
3.考虑非线性因素:在实际的系统中,非线性因素往往是无法避免的。
如何使用Matlab进行控制系统设计和分析
如何使用Matlab进行控制系统设计和分析引言:控制系统是现代工程领域中一个重要的研究方向,它在许多领域中发挥着重要作用,例如航空航天、汽车工程、机械工程等。
Matlab作为一种功能强大的工具,可用于控制系统设计和分析。
本文将介绍如何使用Matlab进行控制系统设计和分析,从基本概念到具体应用等方面进行讲解。
一、Matlab中的控制系统工具箱Matlab提供了控制系统工具箱,该工具箱包含了一系列用于控制系统设计和分析的函数和工具。
通过调用这些函数,我们可以方便地创建、分析和优化控制系统。
二、控制系统的基本概念在进行控制系统设计和分析前,我们需要了解控制系统的基本概念。
控制系统由输入、输出和系统本身组成。
输入是控制系统接收的信号,输出是控制系统产生的信号。
系统本身是由一些元件组成的,例如传感器、执行器和控制器等。
三、Matlab中的控制系统建模在进行控制系统设计和分析前,我们需要对系统进行建模。
建模是指将现实世界中的系统抽象为数学模型。
Matlab提供了建模工具,例如传递函数、状态空间模型等,可以方便地进行系统建模。
四、控制系统的稳定性分析控制系统的稳定性是控制系统设计中一个重要的指标。
Matlab提供了稳定性分析工具,例如根轨迹法、Nyquist法等。
通过分析系统的稳定性,我们可以评估系统的性能。
五、控制系统的性能指标评估除了稳定性外,性能指标也是控制系统设计中需要考虑的因素。
Matlab提供了性能指标评估工具,例如超调量、调节时间等。
通过评估系统的性能指标,我们可以优化控制系统的性能。
六、控制系统的设计和优化控制系统的设计和优化是实际应用中的核心任务。
Matlab提供了控制系统设计和优化工具,例如PID控制器设计、最优控制器设计等。
通过设计和优化控制系统,我们可以提高系统的鲁棒性和性能。
七、控制系统的仿真和验证在设计和优化控制系统后,我们需要进行系统的仿真和验证。
Matlab提供了仿真和验证工具,例如Simulink等。
基于Matlab与PLC的实时控制系统
基于Matlab与PLC的实时控制系统
林宝全;陈冲
【期刊名称】《南昌大学学报(工科版)》
【年(卷),期】2011(033)003
【摘要】建立了基于Matlab的S7-200 PLC温度实时控制系统,结合Matlab强大的计算能力和灵活的编程方法,解决了PLC控制系统的局限性.该系统在上位机Matlab的Simulink中实现单神经元自适应PID控制算法,下位机S7-200 PLC则负责进行实时数据采样和输出,上下位机间数据通信通过OPC技术实现,并利用Matlab GUI进行监控;研究了系统的实现机制与过程,并对该控制系统进行了测试,取得了良好的控制效果.
【总页数】5页(P298-302)
【作者】林宝全;陈冲
【作者单位】福州大学电气工程与自动化学院,福建福州350002;福州大学电气工程与自动化学院,福建福州350002
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于MATLAB的实时模糊控制系统 [J], 崔蕾蕾;王建华;黄河清
2.基于 OPC的 Matlab与 S7-200 PLC实时通信在过程控制实验装置中应用 [J], 陈宏希;邹益民
3.OPC技术下PLC与MATLAB相结合的实时模糊控制系统 [J], 王树东;毕作文;王红波;孟静静
4.基于MATLAB的控制系统实时仿真平台设计* [J], 张晓东;王海泉;王东云
5.MATLAB与PLC相结合的实时模糊PID控制系统设计 [J], 张秀玲; 韩孝
因版权原因,仅展示原文概要,查看原文内容请购买。
MATLAB语言课件 第7讲 控制系统分析

0 1u
y
1,0
x1 x2
a=[0,1;-6,-5];b=[0;1];c=[1,0];d=0;
[y,x]=step(a,b,c,d)
plot(t,x);hold on
plot(y)
解:1、假设将自然频率固定为ωn =1,ζ= 0,0.1,0.2,0.3,…1,2,3,5。 wn=1;zetas=[0:0.1:1,2,3,5];t=0:0.1:12; hold on for i=1:length(zetas) Gc=tf(wn^2,[1,2*zetas(i)*wn,wn^2]); step(Gc,t) end hold off
由于根轨迹是以 K 为可变参数,根据开环系统 的零极点画出来的,因而它能反映出开环系统零极 点与闭环系统极点(特征根)之间的关系
1. pzmap 功能:绘制系统的零极点图。
格式:[p,z]=pzmap(A,B,C,D)
[p,z]=pzmap(num,den)
pzmap(p,z) 说明:对 SISO 系统,pzmap 函数可绘制出传递函
例:有一二阶系统,求出周期为4秒的方波的输出响应
G(s)
2s2 5s 1 s2 2s 3
num=[2 5 1]; den=[1 2 3]; t=(0:.1:10); period=4; u=(rem(t,period)>=period./2);%看rem函数功能 lsim(num,den,u,t);
系统对数频率曲线,又称为伯德(bode)图 。这种方法 用两条曲线分别表示幅频特性和相频特性。横坐标为w, 按对数log(w)分度。对数相频特性的纵坐标表示 (w) , 单位为“度”。而对数幅频特性的纵坐标为: L(w)=20log(w),单位为dB。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MATLAB平台下的PLC实时控制系统分析—PLC程序设计姓名:华祥学号:94203109 班级:03942第一章文献综述1.1 组态软件概述随着现代工业生产技术、工艺过程日趋复杂,生产设备及装置的规模不断扩大,企业生产自动化程度要求也越来越高,出现了各种工业自动控制系统。
早期的工控系统多是专用的封闭系统,针对不同的生产工艺过程需要编制不同的控制件,工控软件开发周期长、困难大,工业被控对象稍有变动就必须修改源程序,且很难与外界进行数据交互,升级和增加功能都受到限制。
新型的工业控制系统正以标准的工业计算机软、硬件平台构成的集成系统取代传统的封闭式系统,它具有适应性强、开放性好、易于扩展、经济、开发周期短等优点。
通常可以把这样的系统划分为控制层、监控层、管理层三个层次结构。
其中监控层对下连接控制层,对上连接管理层,它不但实现对现场的实时监测与控制,且在自动控制系统中完成上传下达、组态开发的重要作用。
监控层的硬件以工业级的微型计算机和工作站为主,目前更趋向于工业微机;监控层的软件则是指组态软件。
“组态 (Configuration)”的含义是使用软件工具对计算机及软件的各种资源进行配置,达到让计算机或软件按照预先设置自动执行特定任务、满足使用者要求的目的。
组态软件是指一些数据采集与过程控制的专用软件,它是在工控系统监控层一级的软件平台和开发环境,是面向监控与数据采集的软件平台工具,具有丰富的设置项目,使用方式灵活,功能强大。
组态软件能以灵活多样的组态方式(而不是编程方式)提供良好的用户开发界面和简捷的使用方法,其预置的各种软件模块可以非常容易地实现和完成监控层的各项功能,并能同时支持各种硬件厂家的计算机和工/0设备,与高可靠的工控计算机和网络系统结合,可向控制层和管理层提供软、硬件的全部接口,进行系统集成。
组态软件有着工业产品和软件产品的共同特点,其最突出的特点是实时多任务。
例如,数据采集与输出、数据处理与算法实现、图形显示及人机对话、实时数据的存储、检索管理、实时通讯等多个任务要在同一台计算机上同时运行。
组态软件的主要目的,是使使用者在生成适合自己需要的应用系统时,不需要修改软件程序的源代码。
下面是组态软件主要解决的问题:(1) 如何与采集、控制设备间进行数据交换;(2) 使来自设备的数据与计算机图形画面的各元素关联起来;(3) 处理数据报警及系统报警;(4) 存储历史数据并支持历史数据的查询;(5) 各类报表的生成和打印输出;(6) 为使用者提供灵活多变的组态工具,可适应不同应用领域要求;(7) 最终生成的应用系统运行稳定可靠;(8) 具有与第三方程序的接口,方便数据共享。
自动化工程设计人员在组态软件中只需填写一些事先设计的表格,再利用图形功能把被控对象(如反应罐、温度计、锅炉、趋势曲线、报表等)形象地画出来,通过内部数据链接把被控对象的属性与I/O设备的实时数据进行逻辑连接。
当由组态软件生成的应用系统投入运行后,与被控对象相连的I/O设备数据发生变化后会直接带动被控对象的属性发生变化。
若要对应用系统进行修改,也十分方便,这就是组态软件的方便性。
从以上可以看出,组态软件具有实时多任务、接口开放、使用灵活、功能多样、运行可靠的特点。
一般来说,工业过程控制系统的组态有如下一些内容:(1)控制组态控制组态是最重要的。
控制组态又分为过程控制组态和顺序控制组态。
过程控制组态主要针对连续量。
当然,为了构成一个完整的过程控制系统,加入开关量以进行报警等事件处理也是必要的。
顺序控制则主要是针对开关量的控制。
在过程控制中,算法库是很重要的一部分,在建立控制算法库时,将控制软件的算法和参数分离,并将各控制算法功能块固化在EPROM中,在进行组态时生成一个文件,该文件与各个算法相对应,并且含有该控制算法执行所必须的参数,这个文件被装到现场控制站的RAM内存中,因此更改容易,这样,我们就可以将控制算法模块编成标准形式,并且可以应用于很多应用系统中。
在现场控制站中,诸多控制算法模块通常以一个库文件的形式因化在EPROM中,每个算法的入口和入口参数是己知的,这样,在执行时,CPU只是顺序地根据下装到RAM中的文件而依次调用各个子程序,返回参数。
根据文件中的内容写回实时数据库中或输出。
可见,过程控制组态是利用某种方法将适当的控制算法模块连接起来完成特定的控制功能。
过程控制组态一般在现场站进行。
现场站的软件系统是整个组态软件中极其重要的一部分,一般现场站软件采用模块化结构设计,分为执行代码部分和数据部分,执行代码固化在EPROM中,而数据则保留在RAM中,开机时由网络装入。
现场控制站的执行代码分为两部分:周期性执行部分和随机执行部分。
周期性执行部分有:周期性数据采集、转换处理、越限检查、控制算法的周期性运算、周期性的网络数据通信以及周期性系统状态检测等等,一般由硬件时钟实时激活;随机执行部分主要是一些实时功能如信号故障处理、事件顺序信号处理、实时网络数据的接受等随机信号,一般由硬件中断激活.执行代码部分的各个功能模块大致可以分为输入输出处理模块、控制回路运算模块等。
输入信号的处理分为开关量输入处理,模拟量输入处理和脉冲量输入处理。
开关量的输入主要用于进行报警检测,这在控制回路的构成中是必不可少的一环,它由开关状态决定。
模拟量的输入处理则要复杂些,一般要经过尖峰信号抑制和数字滤波之后才可以送入实时数据库,同时,还要进行输入转换处理,将信号转换成工程单位所对应的物理量。
模拟量的输出处理是对信号进行二进制编码,然后送入D/A转换通道即可,开关量的输出则相对简单,取出该位的值与其他各输出位一同输出即可。
此外现场控制站还可能有脉冲量输入处理模块等。
控制回路运算模块是形成控制规律的核心部分,目前的组态软件中大多包含如下的基本功能模块:加减乘除开方算法模块、PID调节模块、选择控制模块等,其中PID为最常用且为广大工程人员掌握的控制算法之一,几乎所有的组态软件都包含各种类型的PID算法,如理想PID调节器、积分分离式PID调节器、不完全微分PID调节器、带死区的PID调节器等。
从而可以满足不同的生产应用的需要。
当然,控制算法中还有许多更高级一些的控制算法,如超前—滞后补偿算法、SMITH 算法、以及目前己开始应用的自适应控制算法、模糊控制算法等等。
然而,仅有这些控制算法是不够完成一个实际系统的控制功能的,还要很多附加的功能才能保证系统的高可靠性和安全性,这些附加功能包括:①控制死区和限幅—提供PID算法的死区值和对输出进行限幅;②控制方式的选择:有自动方式、手动方式和串级方式等几种方式;③控制算法跟踪,无扰切换,这个功能的加入是由于在工业现场控制中,很多工业过程需要复杂的控制策略才能达到最佳的效果,因此需手动到自动,自动到手动等切换。
此外,在复杂控制系统中,串级控制的加入和切除也经常发生。
在不同的控制方式进行切换时,一般不希望有较大的控制输出扰动,所以需要加入控制算法跟踪来实现控制方式之间的无扰切换,保证整个控制系统的可靠性和安全性。
顺序控制的组态与过程控制的组态类似,在上位机进行组态,生成一个下装的目标文件,该目标文件下装到现场站,由现场站去执行。
而在现场站中则固化了顺序控制的若千基本单元,如与或非逻辑运算、定时器和计数器、移位寄存器,从而构成一个控制系统。
(2) 数据库生成、趋势显示和报表技术在组态软件的构成中,数据的记录和分析也是重要的部分,因此数据库也占有很重要的地位,它分为实时数据库系统和历史数据库系统。
实时数据库系统可将数据通过网络下装到现场控制站,也可将现场控制站的数据变为标准格式,通过网络传送给上位机。
通过调用或检查实时数据库的信息,可及时地对系统发生的各种问题作出相应反应,历史数据库系统是将一段时间内的数据存储起来,进行趋势变化分析,同时也可以将一段时间内的重要数据组织起来,汇成表格以便于管理人员进行各种高层次的分析。
(3) 显示部分显示部分是控制系统必不可少的功能之一。
工业流程图画面可以使操作人员不必时刻在排列的仪表盘上检查各仪表的数据或巡视整个过程的运行情况,只需轻松地坐在CRT显示终端前即可观察整个过程的工作情况。
同时,还具有支持各种趋势曲线,历史曲线,棒图等功能。
目前国内比较流行的国产工业自动化通用组态软件是组态王(KingView)。
组态王配有加密锁,支持工程加密;驱动程序较为丰富,如支持DDE、板卡、OPC服务器、PLC、智能仪表、智能模块等;支持ActiveX控件、配方管理、数据库访问、网络功能、冗余功能;其扩展性强,可与管理计算机或控制计算机联网通信。
作为人机接口的智能软件包,组态王是一种流行的PC机上建立工控的对象,它以Windows98/WindowsNT4.0中文操作系统为平台,具有Windows的图形功能完备、界面一致性好和易学易用等特点;它为用户提供了从设备驱动、数据采集到数据处理、流程控制、动画显示、报表输出等组态工作的操作平台;它具有多任务、多线程功能,其系统框架采用VC++编程,提供丰富的设备驱动构件及丰富的图库元件。
利用组态王软件可以大大减少工控软件的开发重复性和单一性,并可利用PC机丰富的软件资源,与组态王融合进行二次开发,达到扩展功能、提高智能化程度和提高参数精度的目的。
1.2 组态软件数据交换技术与以往用计算机语言开发软件相比,组态软件具有成功率高,可靠性强,开发周期短,便于更改、扩充、升级等优点。
但组态软件并非面面俱全,从对组态软件的使用和研究情况看,这些问题主要表现在以下几个方面:(1) 在组态软件没有提供外部设备驱动程序时,它将无法实现和外部设备的通讯,这给用户在开发使用上造成了很大的不便。
(2) 在数据库处理上,组态软件虽然提供了与各种数据库连接的有关数据库操作函数,但不能提供直接对多个表的操作或多个字段的操作。
不能提供关系数据库所要求的直接数据库表格。
(3) 在报表统计处理功能上,组态王虽然提供了这方面的功能,但报表的格式不能满足不同的需要,而且不能完成较为复杂的数据计算与处理。
这就需要使用其它软件来进行数据库扩充或控制算法模块的调用。
目前这方面的研究主要是基于以下几种技术:(1) DDE 标准DDE (Dynamic Data Exchange)是在Windows平台下两个应用程序之间实时交换数据的有效方法,是基于消息的并且利用通常的Windows中的通信联络系统进行内部进程间的相互通信的方法。
它采用客户/服务器模式,使用共享内存来实现进程之间的数据交换以及使用DDE协议获得传递数据的同步。
DDE协议是不同应用程序之间共享数据的一个协议。
(2) OPC 标准OPC (OLE for Process Control)定义了一个开放的接口,在这个接口上基于PC 的软件组件能交换数据。