DSP3_new_电工出版社_2_采用
DSP原理与应用 第三版

运算速度 以上。TMS320C6201执行1024点复数FFT运算时间只有66uS。
高度集成化
集滤波、A/D、D/A、ROM、RAM和DSP内核于一体的
运算精度和动态范围
模拟混合式DSP芯片已有较大的发展和应用。 DSP字长从8位已增到64位,累加器长度也增到40位,
开发工具
提高了运算精度。同时,采用超长字指令字(VLIW)结构和
2. TMS320C55x概况
目前C55x系列芯片主要有:
C5501/2(主频300MHz, McBSP,HPI接口), C5503/6/7/9A (主频200MHz, McBSP, HPI,
优点:成本低廉 缺点:性能差、
速度慢
DSP处理器
优点:速度高、大规模生产成本低; 缺点:开发成本高、通用性差。
针对数字信号处理的要求而设计,是数 字信号处理系统设计中采用的主流芯片。 优点:灵活、高速、便于嵌入式应用
7
1.2 DSP芯片简介
1.2.1 DSP芯片的发展历史、现状和趋势 1.2.2 DSP芯片的特点 1.2.3 DSP芯片的分类 1.2.4 DSP芯片的应用领域 1.2.5 选择DSP芯片考虑的因素
可同时进行取指令和多个数据存取操作,使CPU
在一个机器周期内可多次对程序空间和数据空
采用哈佛结构 间进行访问, 大大地提高了DSP的运行速度。
采用多总线结构
T1
T2
T3
T4
时钟
采用流水线结构
取指令
N
N+1
N+2
N+3
指令译码
N-1
N
N+1
N+2
配有专用的硬件乘法-累加器 取操作数 N-2
DSP题库
DSP原理及应用考试题库电子技术应用教研室2012.05.20目录一、填空题 (1)二、选择题 (6)三、判断题 (10)四、简答题 (13)五、程序阅读题 (18)六、指令分析 (24)七、程序改错题 (28)八、程序编写 (30)九、程序识读 (31)十、硬件电路分析 (33)一、填空题1、累加器A分为三个部分,分别为;;。
2、TMS320VC5402型DSP的内部采用条位的多总线结构。
3、TMS320VC5402型DSP采用总线结构对程序存储器和数据存储器进行控制。
4、TMS329VC5402型DSP有个辅助工作寄存器。
5、DSP处理器TMS320VC5402中DARAM的容量是字。
6、TI公司的DSP处理器TMS320VC5402PGE100有___________个定时器。
7、在链接器命令文件中,PAGE 1通常指________存储空间。
8、C54x的中断系统的中断源分为中断和中断。
9、TI公司DSP处理器的软件开发环境是__________________。
10、DSP处理器TMS320VC5402外部有___________根地址线。
11、直接寻址中从页指针的位置可以偏移寻址个单元。
12、在链接器命令文件中,PAGE 0通常指________存储空间。
13、C54x系列DSP处理器中,实现时钟频率倍频或分频的部件是_____________。
14、TMS320C54x系列DSP处理器上电复位后,程序从指定存储地址________单元开始工作。
15、TMS320C54x系列DSP处理器有_____个通用I/O引脚,分别是_________。
16、DSP处理器按数据格式分为两类,分别是_______;_____。
17、TMS329VC5402型DSP的ST1寄存器中,INTM位的功能是。
18、MS320C54X DSP主机接口HPI是________位并行口。
19、在C54X系列中,按流水线工作方式,分支转移指令的分为哪两种类型:_______;_______。
dsp课件

在代码实现完成后,进行代码调试,确保程序的正确性和稳定性。
调试与测试结果分析总结
调试过程
在代码调试完成后,进行系统调试,确保各个模块之间的协调和正 常运行。
测试结果分析
对测试结果进行分析,包括性能测试、功能测试等,找出可能存在 的问题和不足。
总结
根据调试和测试结果,对项目进行总结,包括经验教训、改进方向等 ,为后续的项目提供参考和借鉴。
DSP课件
目录
• DSP概述 • DSP硬件结构与工作原理 • DSP软件编程与开发环境 • 典型应用案例分析 • DSP发展趋势与挑战 • 实践项目设计与实现
01 DSP概述
定义与发展
定义
数字信号处理(Digital Signal Processing,简称DSP)是一门涉及多个学科 的交叉学科,主要研究将模拟信号转换为数字信号,并对数字信号进行各种处 理。
通信信号处理应用
总结词
通信信号处理是数字信号处理的另一个重要应用领域,涉及信号的调制、传输和解调等环节。
详细描述
在通信信号处理中,数字信号处理技术可以用于信号的调制、编码、解调和解码等环节,同时还可以 进行信号特征提取、分类和识别等任务。具体的应用包括移动通信、卫星通信、数字电视和雷达信号 处理等。
未来DSP将进一步提高处理速度和效率,满足更 多复杂应用的需求。
更低的功耗
通过不断优化技术,降低DSP的功耗,延长设备 的使用寿命。
更广泛的应用领域
DSP将在更多领域得到应用,如智能家居、自动 驾驶、医疗保健等。
06 实践项目设计与 实现
项目需求分析与设计思路
明确项目目标
01
在开始实践项目之前,需要明确项目的目标,包括要实现的功
DSP基本介绍及CCS软件分解PPT课件

次浮点操作/ ➢ 秒。表征浮点DSP运算性能的重要指标。 ➢ MBPS (Million-bits Per S第e1c8o页n/d共)43页:百万位/秒。用于衡量DSP的数据
电路等
第26页/共43页
通用IO
• 在TMS320F281 x处理器有限的引脚当中,相当一部分都是特殊功能引脚和GPIO引脚公用的。实际上, GPIO作为与其他设备进行数据交换的通道,也是非常有用的。
• GPIOMux寄存器选择这些引脚的功能,如果配置成通用的数字 IO引脚,则还需要通过DATDIR数据和方向 控制寄存器来控制。
第33页/共43页
• 为了避免产生不必要的复位,要求用户定期对看门狗定时器进行复位。 • 如果不明的原因使CPU中断程序,看门狗将产生一个复位信号,使CPU复位,程
序从系统软件的开始执行。 • 看门狗有效地提高了系统的可靠性。
第32页/共43页
PLL时钟模块
• 锁相环(PLL)模块主要用来控制DSP内核的工作频率,外部提供一个参考 时钟输入,经过锁相环倍频或分频后提供给DSP内核。C281 x数字信号处 理器能够实现0.5~10倍的倍频。
第20页/共43页
、 4 TMS320F2812 性能概述
1. TMS320F28X 介绍 2. TMS320F28X功能框图
第21页/共43页
1. TMS320F28X介绍
TMS320C28x系列是TI公司最新推出的DSP芯片,是目前国际市场 上最先进、功能最强大的32位定点DSP芯片。它既具有数字信号处理能力, 又具有强大的事件管理能力和嵌入式控制功能,特别适用于有大批量数据处理 的测控场合,如工业自动化控制、电力电子技术应用、智能化仪器仪表及电机、 交直流伺服控制系统等。
基于双DSP的三相四线制二重化静止无功发生器设计

配 电系 统 中配 备 有 大 量 带整 流 、 逆 变 等 非 线 性 负
荷 ,它 们 在 使 用 过程 中 会 产 生 大 量 的 谐 波 和 电负荷 占总容 量
其 不但 具有补 偿 无功功 率 的基本 功 能 ,而 且还 具有
的 7%左 右 ,采用 单相 供 电造 成三 相配 电负荷不 平 0 衡 ,中 性 点 偏 移 ,存 在 较 大 的 中线 电流 。 这 些 无
0 引言
随 着 现 代 电 力 电 子 技 术 的 飞 速 发 展 , 在 低 压
有 一定 的局 限性 :装 置 的功率等 级较 低 ,而且 一般 仅 局 限于补 偿无 功功 率 ,对 于应 用 到三相 四线 系统 的 S G则更较 少提 及 。 V 本 文针 对上 述 应用 场合 研 制 了一 台基 于双 D P S 三 相 四线制 二重化 S G V 装置 ,该装 置相 对于 普通S G V
摘 要:介 绍了三相 四线N-重化静止无功发生器 (V ) S G 的工作 原理和主 电路结构 ,根据其特点设计
了基于双 D P的数模混 合控制系统 ,给 出了控 制系统硬件结 构 以及软件实现 。实验结果表 明采用 二重化 S 结构很好地 缓解 了系统容量和 开关频 率 的矛盾 ;同时该装置不但能很好地 补偿无功功率 ,还 能补偿负载
Ab ta t It d ci s d rigp ic l a dma i ut r cueo d a s t a e eao (VG) t rep aefu — sr c :nr u t nwa et wokn r i e n i cr i S t tr f u l t i v r n rtr S o o ma o np n c ’s u a a c g wi t e - h s r hh o
DSP

DSP(digital singnal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。
DSP器件是一种特别适合于进行数字信号处理运算的微处理器,其主要应用是实时快速地实现各种数字信号算法处理。
按数据格式划分,DSP器件可以分为定点和浮点两种。
发展史:世界上第一个单片DSP芯片应当是1978年AMI公司发布的S2811,1979年美国Intel 公司发布的商用可编程器件2920是DSP芯片的一个主要里程碑。
这两种芯片内部都没有现代DSP芯片所必须有的单周期乘法器。
1980年,日本NEC公司推出的μPD7720是第一个具有乘法器的商用DSP芯片。
在这之后,最成功的DSP芯片当数美国德州仪器公司(TexasInstruments,简称TI)的一系列产品。
TI公司在1982年成功推出其第一代DSP芯片TMS32010及其系列产品TMS32011、TMS320C10/C14/C15/C16/C17等。
目前已推出速度最快的第六代DSP芯片TMS320C62X/C67X等。
与传统GPP相比,dsp具有以下优点:1 对密集的乘法运算的支持DSP 处理器使用专门的硬件来实现单周期乘法。
DSP处理器还增加了累加器寄存器来处理多个乘积的和。
2 存储器结构传统上,GPP 使用冯.诺依曼存储器结构。
这种结构中,只有一个存储器空间通过一组总线连接到处理器核。
大多数DSP采用了哈佛结构,将存储器空间划分成两个,分别存储程序和数据。
它们有两组总线连接到处理器核,允许同时对它们进行访问。
3 零开销循环所谓零开销循环是指处理器在执行循环时,循环计数.条件转移等循环机制由专门硬件控制,而处理器不花费任何时间。
4 专门的寻址方式DSP 处理器往往都支持专门的寻址模式,它们对通常的信号处理操作和算法是很有用的。
例如,模块(循环)寻址(对实现数字滤波器延时线很有用)、位倒序寻址(对FFT很有用)。
这些非常专门的寻址模式在GPP中是不常使用的,只有用软件来实现。
《DSP原理与应用》课件

DSP与模拟信号处理的比较
原始信号
模拟信号处理基于连续信号,数字信号处理基于离散信号。
处理方式
数字信号处理能够使用计算机技术来高效地实现复杂的处理算法。
系统复杂度
数字信号处理系统通常比模拟信号处理系统更加复杂,但可以实现更高的处理精度。
数字信号处理中的时间和频率分析
时间域分析
时间域分析用于了解信号随时间变化的规律,以便 更好地理解信号。
DSP在音频信号处理中的应用
音频数字信号处理
音频数字信号处理可以提高音质,混响消除,消回声降噪等方面都可以运用。
立体声
DSP在立体声方面可以实现环绕音效、模拟融合等处理。
语音识别
DSP技术在语音识别中发挥着极其重要的作用。
DSP在视频信号处理中的应用
视频编解码
DSP在视频编解码方面可以提高压缩速度和压缩比;
数字滤波器分为有限脉冲响应(FIR)和无限脉 冲响应(IIR)两种类型。
数字滤波器的特点
数字滤波器可以实现各种复杂滤波算法,具有 高精度和处理速度快等特点。
FIR与IIR数字滤波器的比较
FIR数字滤波器
FIR数字滤波器具有线性相位、相对稳定的稳态性能,但计算复杂度通常较高。
IIR数字滤波器
IIR数字滤波器具有更低的计算复杂度,但是在一些特殊情况下可能会出现不稳定性。
先进芯片技术
先进芯片技术是DSP未来发展的必要条件,新的芯片 技术必将会为DSP的智能化、小型化开辟新的道路。
人工智能
随着人工智能的发展,DSP将有更广泛的应用场景, 如机器人、自动驾驶等领域。
DSP在智能控制领域的应用前景
自动控制
在自动控制领域,DSP可以用于传感器数据采集、处理、控制回路与调节等方面。
dsp3_Q
3.2周期序列的离散傅里叶级数(DFS)及性质
1.周期序列的离散傅里叶级数
若离散时间序列x(n)为周期序列,则 x(n)=x(n+rN)
其中N(正整数)为信号的周期,该周期序列记作:
~
x
(
n
)
周期序列可以用傅里叶级数(DFS)来表示,其定义公式为:
x ~(n)1N 1X ~(k)ej2 N nkID F S[X ~(k)]n0,1,..N ..,1
2 n e v e n
n
例3-3 若序列h(n)是实因果序列,其傅里叶变换的实部为
HR(ej)1cos,求序列h(n)及其傅里叶变换 H ( e j )
解:由题意知:
比较两式得: 由于h(n)是实因果序列,根据共轭对称性得:
因此 H (ej)h e(n )ejn 1 ej2 ej 2co s n
第3章 离散时间系统的频域分析——傅里叶变换
3.1 非周期序列的傅里叶变换及性质 3.2 周期序列的离散傅里叶级数(DFS)及性质 3.3 有限长序列的离散傅里叶变换(DFT) 3.4 频率抽样理论 3.5 利用DFT对连续时间信号处理时应注意的问题
3.1 非周期序列的傅里叶变换及性质
3.1.1 非周期序列傅里叶变换
5.时间反转
设 D TFT[x(n)]X(ej)
则 D TF T[x(n)]X(ej)
6.尺度变换 DTFT[anx(n)]X(1ej) a
7.频域微分
DTFT[nx(n)]jdX(ej)
d
3.1.2 非周期序列傅里叶变换的性质
8.共轭性
设 D TFT[x(n)]X(ej) 则 D TF T[x*(n)]X*(ej)
5
DSP320系列介绍

• 器件封装:40 脚双列直插(DIP)/44 脚塑封(PLCC) 2.3.1.2 TMS320C10 TMS320 DSP 芯片的第一代产品是基于 TMS32010 和它的 CMOS 版本 TMS320C10 的 结构。TMS32010 于 1982 年推出,是第一个能够达到 5 个 MIPS 的微处理器。 TMS32010 采用改进的哈佛结构,即程序和数据空间相互独立。程序存储器可在片内 (1.5K 字)或片外(4K 字)。片内数据 RAM 为 144 字。有四个基本的算术单元:算术逻 辑单元(ALU)、累加器(ACC)、乘法器和移位器。 (1) ALU:32 位数据操作的通用算术逻辑单元。ALU 可进行加、减和逻辑运算; (2) ACC:累加器存储 ALU 的输出,也是 ALU 的一个输入。它采用 32 位字长操作, 分高 16 位和低 16 位两部分。处理器提供高 16 位和低 16 位的专门指令:SACH(高 16 位) 和 SACL(低 16 位); (3) 乘法器:16×16 位并行乘法器由三个单元组成:T 寄存器、P 寄存器和乘法器阵列。 T 寄存器存储被乘数,P 寄存器存储 32 位乘积。为了使用乘法器,被乘数首先必须从数据 RAM 中装入到 T 寄存器,可用 LT、LTA 和 LTD 指令。然后执行 MPY(乘)或 MPYK(乘 立即数)指令。乘和累加器操作可用 LTA、LTD 和 MPY、MPYK 指令在两个指令周期内完 成; (4) 移位器:有两个移位器可用于数据移位。一个是桶形移位器,另一个是并行移位器。 桶形移位器又称定标移位器。当数据存储器的数据送入累加器或与累加器中的数据进行运 算时,先通过这个移位器进行 0~16 位左移,然后再进行运算。并行移位器即输出移位器, 其作用是将累加器中的数据左移 0、1 或 4 位后再送入数据存储器中,以实现小数运算或小 数乘积的调整。 在 TMS32010/C10 基础上又派生了多个处理器,它们可提供不同的处理器速度、存储 器扩展和各种 I/O 集成。
DSP技术与应用(第三版)
1.DSP芯片的结构特点有哪些,如何分类特点:1、改进型的哈佛结构 2、采用多总线结构 3、采用流水线技术4、配有专用的硬件乘法-累加器5、具有特殊的DSP指令6、快速的指令周期7、硬件配置强8、支持多处理器结构9、省电管理和低功耗分类:1、按基础特性分类2、按用途分类3、按数据格式分类2.试述TSM320C54X芯片在提高芯片运算速度方面采用了哪些措施?1、采用了单个指令周期实现乘加运算的处理技术2、单周期实现多个运算单元并行处理3、数据搬运工作由DMA处理,无需CPU干涉4、提供针对高级数学运算(指数、开方、FFT等)的库函数3. TSM320C54X芯片的总线有哪些?它们各自的作用和区别是什么?答:C54XDSP片内有8条16位总线,即4条程序/数据总线和4条地址总线。
程序总线(PB):传送取自程序存储器的指令代码和立即操作数。
数据总线(CB、DB和EB)。
将内部各单元(如CPU、数据地址生成电路、程序地址生成电路、芯片外围电路及数据存储器)连接在一起。
其中,CB和DB传送读自数据存储器的操作数,EB传送写到存储器的数据。
地址总线共有四组,分别为PAB、CAB和EAB,主要用来提供执行指令所需的地址。
4. DSP采用多处理单元结构有何好处?可完成巨大运算量的多处理器系统,即将算法划分给多个处理器,借助高速通信接口来实现计算任务并行处理的多处理器阵列5. TSM320C54X芯片的CPU主要包括哪些部分?它们的功能是什么?答:1)算术逻辑单元(ALU):40位的算术逻辑单元(ALU)和两个40位的累加器ACCA和ACCB用来二进制补码算术运算和布尔运算,可完成宽范围的算术逻辑运算。
2)累加器(ACCA和ACCB):可用于存放从ALU或乘/加单元输出的数据,也能输出数据到ALU或乘/加单元。
3)桶形移位寄存器:一个40位输入与累加器或数据总CB、DB相连,一个40位输出与ALU或数据总线EB相加。
DSP在三相无刷直流电机中的应用
DSP在三相无刷直流电机中的应用浏览5325次1 概述无刷直流电机是随着电力电子器件及新型材料发展而迅速成熟起来的一种新型机电一体化电机,它既具有交流电机的结构简单,运行可靠,维护方便等优点,又具备直流电机那样良好的调速特性而无由于机械式换向器带来的问题,还具有运行转速稳定、效率高、相对成本低等优点,因此被广泛应用于各种调速驱动场合[1]。
以往的无刷直流电机多由单片机附加许多种接口设备构成.不仅复杂,而且速度也受到限制,难于实现从位置环到速度、电流环的全数字控制,也不方便扩展。
而应用数字信号处理器(DSP)实现的电机伺服系统却可以只用一片DSP就可以替代单片机和各种接口, 扩展方便,可以实现位置、速度和电流环的全数字化控制[2]。
本文采用TI公司推出的240xDSP作为无刷直流电机全数字控制核心,组成的伺服系统只需要很少的系统元件。
TMS320F240X是美国TI公司推出的高性能16位数字信号处理器(DSP),是专门为电机的数字化控制而设计的。
这种DSP包括一个定点DSP内核及一系列微控制器外围电路,将数字信号处理的运算能力与面向电机的高效控制能力集于一体,可以实现用软件取代模拟器件,方便地修改控制策略,修正控制参数,兼具故障检测、自诊断和与上位机通信等功能。
2 硬件介绍TMS320LF2407A的内核是TMS320C2XX(图1),内部采用了哈佛结构,流水线作业,在20MHz的时钟频率下,指令周期仅为50ns,且多数指令都能在一个指令周期内完成。
其中央算术逻辑部分包括32位中央算术逻辑单元(CALU),32位累加器,CALU的输入/输出数据定标移位器,16位×16位乘法器,乘积定标移位器,数据地址发生逻辑(包括8个辅助寄存器和1个辅助寄存器算术单元(ARAU),程序地址发生逻辑。
当处理器连续工作时,还能同时执行:a、经由串行口的数据接收和发送;b、内部定时器减数;c、产生三相脉宽调制(PWM)波形;d、采集4个模拟信号;e、看门狗定时器减数。
DSP原理及应用第二版课件
RS (复位、外部硬件中断)。
NM I (外部硬件中断)。
29
第6章 TMS320C54x片内外设 也可以用软件进行 RS 和 NM I 中断。 NM I 中断不会对
TMS320C54x的任何操作方式发生影响。 NM I中断响应时, 所有其他的中断将被禁止。而复位 RS 是一个对TMS320C54x 所有操作方式产生影响的非屏蔽中断,复位后,TMS320C54x 的相关内部资源设置的状态如下:
31
第6章 TMS320C54x片内外设
ARP = 0 C16 = 0 DROM = 0 OVB = 0 XF = 1
ASM = 0 CLKOFF = 0 FRCT = 0 OVLY = 0
AVIS = 0 CMPT = 0 HM = 0 OVM = 0
BRAF = 0 CPL = 0 INTM = 1 SXM = 1
第6章 TMS320C54x片内外设
6.1 时 钟 发 生 器
图6-1 时钟电路时钟发生器为TMS320C54x提供时钟信 号,它包括一个内部振荡器和一个锁相环电路。时钟发生器可 以由内部振荡电路或外部时钟源驱动。
1
第6章 TMS320C54x片内外设 内部振荡电路驱动方式:将一个晶体跨接到X1和X2/
21
第6章 TMS320C54x片内外设 3.IDLE3模式 IDLE3模式类同于IDLE2,它使片内锁相环PLL暂停工作,
这样就完全使TMS320C54x停止了工作。与IDLE2相比, IDLE3更显著地降低了功耗。此外,如果系统需要工作在较低 频率,则IDLE3状态可重新配置PLL。进入和结束IDLE3模式 的方法同IDLE2。
C=1 DP = 0 OVA = 0 TC = 1
基于DSP的三相交流异步电机矢量控制系统共3篇
基于DSP的三相交流异步电机矢量控制系统共3篇基于DSP的三相交流异步电机矢量控制系统1基于DSP的三相交流异步电机矢量控制系统随着现代工业技术的不断发展,电机产业也在不断进步和创新。
三相交流异步电机是电机中最常见的一种电机。
它具有结构简单、维护方便、使用范围广泛、价格便宜等特点。
因此,三相交流异步电机在各个领域得到广泛的应用。
然而,由于其控制复杂度和效率的问题,导致其在当今的应用中仍然存在一些不足。
为此,我们需要采用先进的技术来提高其性能表现,这就是基于DSP的三相交流异步电机矢量控制系统。
基于DSP的三相交流异步电机矢量控制系统是一种新型的电机控制系统,它的核心是数字信号处理器(DSP)。
在这个系统中,利用DSP最强大的计算处理能力,将三相交流异步电机的控制精度提高到了一个新的高度。
其原理非常简单,就是利用恰当的控制方法,控制三相交流异步电机的电流和磁通,使得电机具有良好的动态性能和静态性能,达到电机的最佳控制效果。
矢量控制系统是实现基于DSP的三相交流异步电机控制的核心思想。
该方法利用磁通和电流矢量的旋转定向控制电机的转矩和转速。
在该系统中,两个正交轴上的矢量可以分别控制电机的力矩和转速,从而实现对电机的控制。
此外,该系统还可以提供多种工作模式,满足不同工作环境的需求,提高电机的适应能力。
该系统的控制效果主要体现在以下三个方面:1. 精度高。
采用矢量控制方法,可以使得电机的控制精度比传统的控制方法更高,精度达到了0.1%左右,表现出了非常优秀的控制效果。
2. 动态性能好。
基于DSP的三相交流异步电机矢量控制系统具有良好的动态性能,其响应速度快,控制静态误差小,电机响应灵敏,转速范围广,可以适应各种工作环境。
3. 稳定性强。
在该系统中,通过对电机的电流和磁通进行控制,使得电机始终处于稳定状态,防止了电机产生“异步转速”现象。
同时,该系统还具有很好的抗干扰能力,工作稳定可靠。
总之,基于DSP的三相交流异步电机矢量控制系统是目前在电机控制领域中一种非常有效的控制方法,其控制精度高、动态性能好、稳定性强等优点具有非常广阔的应用前景。
DSP控制三相PFX
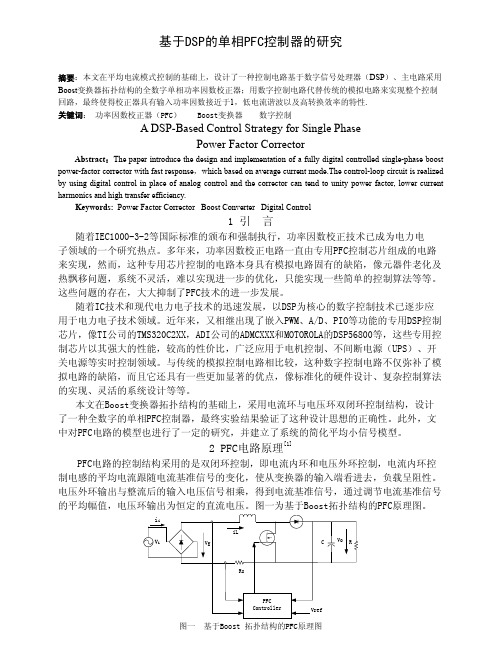
基于DSP的单相PFC控制器的研究摘要:本文在平均电流模式控制的基础上,设计了一种控制电路基于数字信号处理器(DSP)、主电路采用Boost变换器拓扑结构的全数字单相功率因数校正器;用数字控制电路代替传统的模拟电路来实现整个控制回路,最终使得校正器具有输入功率因数接近于1,低电流谐波以及高转换效率的特性.关键词:功率因数校正器(PFC) Boost变换器 数字控制A DSP-Based Control Strategy for Single PhasePower Factor CorrectorAbstract:The paper introduce the design and implementation of a fully digital controlled single-phase boost power-factor corrector with fast response,which based on average current mode.The control-loop circuit is realized by using digital control in place of analog control and the corrector can tend to unity power factor, lower current harmonics and high transfer efficiency.Keywords: Power Factor Corrector Boost Converter Digital Control1 引 言随着IEC1000-3-2等国际标准的颁布和强制执行,功率因数校正技术已成为电力电子领域的一个研究热点。
多年来,功率因数校正电路一直由专用PFC控制芯片组成的电路来实现,然而,这种专用芯片控制的电路本身具有模拟电路固有的缺陷,像元器件老化及热飘移问题,系统不灵活,难以实现进一步的优化,只能实现一些简单的控制算法等等。
基于dsp三相逆变整流电源的课程设计

综合课设报告一、背景意义和目的近年来,随着微机,中小型计算机的普及和航天航空数据通信,交通邮电等专业的迅速发展,以及为了各种自动化仪器、仪表和设备套的需要,当代对电源的需求不仅日益增大,而且对电源的性能、效率、重量、尺寸和可靠性以及诸如程序控制、电源通/端、远距离操作和信息保护等线性稳压电源功能提出了更高的要求,对于这些要求。
传统的线性稳压电源无法实现,和线性稳压电源相比,开关电源具有:效率高,稳压范围宽,体积小重量轻,安全可靠。
学习目的:1. 巩固电力电子以及dsp 课程的理论知识;2. 学习和掌握中电力电子系统控制系统设计的基本方法,设计一个三相50Hz 交流稳压电源;3.培养学生独立分析和解决工程问题的工作能力及实际工程设计的基本技能4.提高编写技术文件和制图的技能。
二、任务要求对三相50Hz 交流稳压电源的理论进行研究,设计一台样机,参数为50Hz ,电压36V ,容量为100V A ,电压稳定度95%,失真度小于5%,效率80%。
三、设计内容1.研究三相50Hz 交流稳压电源的理论,并进行仿真;2.了解三相50Hz 交流稳压电源的算法,软件设计编程及调试;3.相应的硬件电路设计和调试。
四、系统原理1.系统主电路,采样调理电路,控制电路,光电隔离电路,和保护电路组成,系统组成框图如图1所示,负负负负负负负负负负负负负负负DSP负负负负负负图1 系统组成框图2.系统主电路系统主电路是典型的AD-DC-AD 逆变电路,由整流电路、中间电路、逆变电路和隔离变压器构成。
整流电路将输入的三相交流电经整流;中间电路滤波后的直流供给逆变器;逆变电路将直流电逆变为50Hz 的三相正弦交流电。
主电路系统组成框图如图2所示。
负负图2 主电路系统组成框图 1)主电路参数的确定为了得到36V 的电压,我们知道逆变过来的电路中的关系,直流侧的电压U d =V vM U 807.020*2*2*2*2==这里的调制度M=0.7; U=36/1.732=20V . 逆推过去,U d 是经过不可控整流过来的,U d =2.45*U 0;所以U 0=32.65V 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Smem
功能: T=Smem,(Smem+1)= Smem 将单数据存 储器Smem的数据,送入寄存器T,并延时。
11
2.存储指令 是将源操作数或立即数存入指定存储器或寄存 器,共计14条。 格式: 操作码 源操作数 [,移位数] ,目的操作数
功能: 源操作数按移位数进行移位,将移位结果存入
Smem DST src 源累加器A或B 5位移位数 16位单数据 SHIFT 目的存储器或寄存器。 存储器操作数 ST T 暂存器 -16SHIFT15 Xmem 16位双数据 STH TRN 状态寄存器 4位移位数 SHFT 存储器操作数 STL #lK 16位长立即数 0SHFT15 STLM MMR ASM 5位移位数 存储器映像寄 STM 存器 -16ASM15
ADD Xmem,Ymem,dst
ADD #lk[,SHFT],src[,dst]
ADD #lk,16,src[,dst] ADD src,[,SHIFT][,dst]
src
ADD src,ASM[,dst]
22
(1)加法指令
操作码
ADDC ADDM ADDS
源操作数
Smem #lk Smem
指令格式
13
3.条件存储指令
根据条件将源操作数存入目的存储器,共计4条 指令。
(1) CMPS src,Smem
功能: 若src(31~16)> src(15~0),则Smem=src(31~16); 若src(31~16) src(15~0),则Smem=src(15~0)。 即比较累加器的高、低位,并存储最大值。
Lmem = src Smem = T Smem = TRN Smem = #lk Smem = src(31-16) Smem = src(31-16)<<ASM Xmem = src(31-16)<<SHFT Smem = src(31-16)<<SHIFT Smem = src(15-0) Smem = src(15-0)<<ASM Xmem = src(15-0)<<SHFT Smem = src(15-0)<<SHIFT MMR = src(15-0) MMR = #lk
目的操作数:src、dst、Smem
21
(1)加法指令 操作码 源操作数 Smem Xmem ADD #lk 指令格式
ADD ADD ADD ADD ADD Smem,src Smem,TS,src Smem,16,src[,dst] Smem,[,SHIFT],src[,dst] Xmem,SHIFT,src
5
1.装载指令 (4) LD
Smem,16,dst
功能: dst=Smem<<16 将Smem所指定的单数据存 储器的数据左移16位后送入A或B。 (5) LD Smem [,SHIFT],dst 功能: dst=Smem<<SHIFT 将Smem所指定的单数据 存储器的数据,按SHIFT所给定的移位数移 位,然后送入A或B。 (6) LD Xmem,SHFT,dst 功能: dst=Xmem<<SHFT 将Xmem所指定的双数据 存储器的数据,按SHFT所给定的移位数移 位,然后送入A或B。 6
18
4.混合装载和存储指令 (10) PORTW Smem,PA
功能: PA = Smem 将数据存储器Smem中的数据传送到 以PA为地址的I/O口中。
(11) READA
Smem
功能: Smem = Pmem(A) 将以累加器A为地址的程序存 储器中的数据传送到数据存储器Smem中。
(12) WRITA
12
存储指令
序 号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 指 令 DST src , Lmem ST T , Smem ST TRN , Smem ST #lk , Smem STH src , Smem STH src ,ASM ,Smem STH src ,SHFT ,Xmem STH src [,SHIFT],Smem STL src , Smem STL src ,ASM ,Smem STL src ,SHFT ,Xmem STL src [,SHIFT],Smem STLM src , MMR STM #lk , MMR 功 能 说 明
ADDC Smem,src ADDC #lk,Smem ADDC Smem,src
23
加法指令功能
功能: ASM = #k5 将5位立即数送入累加器移 位方式位ASM。
9
1.装载指令 (16) LD #k3,ARP 功能: ARP = #k3 将3位立即数送入ARP(3位辅 助寄存器指针位)。 (17) LD Smem,ASM 功能: ASM = Smem(4-0) 将Smem所指定的单数 据存储器的低5位数据送入ASM。 (18) LDM MMR,dst 功能: dst = MMR 将MMR寄存器中的数据,送 入累加器dst。
功能: T = Smem 将Smem所指定的单数据器的 8 数据送入暂存器T。
1.装载指令 (13) LD
Smem,DP
功能: DP = Smem(8-0) 将Smem所指定的单数 据存储器的低9位数据,送入数据存储 器页指针DP。 (14) LD # k9,DP 功能: DP = #k9 (15) LD #k5,ASM 将9位立即数送入DP。
将映像寄存器MMRx中的数据传送
功能: MMRy = MMRx 到MMRy中。
(8) MVPD
pmad,Smem
功能: Smem = pmad 将以pmad为地址的程序存储器中 的数据传送到数据存储器Smem中。
(9) PORTR
PA,Smem
功能: Smem = PA 将以PA为地址的I/O口中的数据传送 到数据存储器Smem中。
Smem
功能: Pmem(A) = Smem 将数据存储器Smem中的数据 传送到以累加器A为地址的程序存储器中。
19
3.4.2 算术运算指令
算术运算指令是实现数学计算的重要指令集合。
’C54x的算术指令具有运算功能强、指令丰富等特点。
包括: 加法指令(ADD) 减法指令(SUB) 乘法指令(MPY) 乘法-累加/减指令(MAC/MAS) 双字运算指令(DADD) 特殊用途指令
10
1.装载指令 (19) LDR
Smem,dst
功能: dst(31-16)=rnd(Smem) 将Smem所指定的 单数据存储器的数据舍入后送入累加器。
(20) LDU
Smem,dst
功能: dst = uns(Smem) 将Smem所指定的单数 据存储器的无符号数据,送入累加器。 (21) LTD
20
3.4.2 算术运算指令
(1)加法指令 ’C54x的加法指令共有13条,可完成两个操作数 的加法运算、移位后的加法运算、带进位的加法运算 和不带符号位扩展的加法运算。 指令格式:操作码 源操作数 [,移位数] ,目的操作数 操 作 码: ADD、ADDC、ADDM、ADDS 源操作数: Smem、Xmem、Ymem、#lk、src 移 位 数: TS、16、SHIFT、SHFT、ASM
功能: 若满足cond条件,则将T寄存器中的内容存入
15
4.混合装载和存储指令 用于完成数据存储器、程序存储器以及I/O口 之间的数据传输,共计12条。 (1) MVDD Xmem,Ymem
功能: Ymem = Xmem 将数据存储器Xmem中的数据传送 到数据存储器Ymem中。
(2) MVDK
Smem,dmad
DSP技术及应用
Digital Signal Processor 数字信号处理器 刘君
1
4.3 TMS320C54x的指令系统
’C54x的指令系统共有129条基本指令,由于操
作数的寻址方式不同,由它们可以派生多至205条
指令。 按指令的功能可分成六大类: 数据传送指令 算术运算指令 逻辑运算指令 程序控制指令
将数据存储器Smem中的数据传送 到以dmad为地址的数据存储器中。
功能: dmad = Smem
(3) MVDM
dmad,MMR
将以dmad为地址的数据存储器中的
16
功能: MMR = dmad
数据传送到MMR中。
4.混合装载和存储指令
(4) MVDP
功能:
Smem,pmad
pmad = Smem 将数据存储器Smem中的数据传送 到以pmad为地址的程序存储器中。
(5) MVKD
功能:
dmad,Smem
Smem = dmad 将以dmad为地址的数据存储器中 的数据传送到数据存储器Smem中。
(6) MVMD
功能:
MMR,dmad
dmad = MMR 将MMR中的数据传送到以dmad为地 址的数据存储器中。
17
4.混合装载和存储指令 (7) MVMM
MMRx,MMRy
累加器值存入长字存储单元 暂存器值存入存储单元
状态寄存器值存入存储单元 长立即数存入存储单元 累加器高阶位存入存储单元 累加器高阶位移位后存入存储单元 累加器高阶移位后存入存储单元 累加器高阶位移位后存入存储单元 累加器低阶位存入存储单元 累加器低阶位移位后存入存储单元 累加器低阶位移位后存入存储单元 累加器低阶位移位后存入存储单元 累加器低阶位存入MMR 长立即数存入MMR
7
1.装载指令 (10) LD
src,ASM [,dst]
功能: dst = src<<ASM 将源累加器src中的数 据,按ASM(-16SAM15)所给定的移位 数移位后,送入目的累加器dst。 (11) LD src [,SHIFT] [,dst] 功能: dst = src<<SHIFT 将源累加器src中的 数据,按SHIFT所给定的移位数移位后, 送入目的累加器dst。 (12) LD Smem,T