STM32F103RCT6
北京金朗鸿新信息技术有限公司 STM32F103RCT6 核心板 使用说明 V1.0.1说明书
STM32F103RCT6核心板使用说明STM32F103RCT6核心板模块说明:该模块核心处理器为ST(意法半导体)公司的Cortex-M3架构内核的32位处理器,采用封装LQFP-64的嵌入式单片机,具体资源配置参考STM32F103RCT6数据手册。
技术参数:1、工作电压2V~3.6V2、独立SWD下载3、I/O全部引出4、除下载外采用全贴片元件节省空间5、拥有上电复位和按键复位两种选择(默认按键复位)6、板对板连接器方便更换以及二次开发7、启动方式采用拨码开关调节8、尺寸:60mm X42mm实物图:功能介绍:1、STM32F103RCT6:是ST公司的Cortex-M3架构内核的32位处理器封装为LQFP-64的单片机2、该部分为核心板板载的复位按键,当STM32F1系统需要复位时,可按下复位键,死机时可操作此按键3、在ISP下载电路中,我们需要配置BOOT引脚,有关BOOT引脚不同的配置会产生不同的启动方式,具体见表格4-1BOOT配置。
BOOT0BOOT1启动方式启动说明0X内部FLASH 用户闪存存储区,也就是FLASH 启动10系统存储器系统存储器启动,用于串口下载11内部SRAM SRAM启动,用于SRAM中调试代码4、由于STM32支持SWD调试,该部分为SWD下载,该模式只需要2个I/O 口,节约IO口数量,当我们的进行实验时,如果占用的IO口过多,导致JTAG 无法下载,我们选择SWD模式下载,JTAG模式与SWD模式实现的功能是一致的。
原理图:1、最小系统2、电源滤波3、BOOT4、复位5、SWD下载6、背部连接器封装图:注意事项:该核心板需要配合有同样连接器的底板使用,可进行选购或开发者自行设计(要注意连接器方向),此核心板电源电压为3.3V。
如高于额定电压值会将单片机烧毁。
STM32F103RCT6使用说明

STM32开发板使用手册风帆 STM32开发板是风帆电子为初学者学习STM32 Cortex M3 系列ARM 而设计的学习板。
以STM32F103RCT6芯片为核心,配套寸彩色TFT屏模块,板载UART、USB、ADC电压调节、按键、JTAG接口、彩屏接口、流水灯、SD卡接口、IO引出口等多种硬件资源。
v1.0 可编辑可修改JTA2个LEDGPIOA引出1O USB 串口DS10B 20预HS0038红外接红外温度传感器连接GPIOB@C引出IO OLED@LCD 共用接口STM32F103寸LCD 接485芯片 RS485接口 1:A; 3:BNRF24L01W25Q16 FLASHSD 卡接口(在JF24C 模块预留GPIOC @D 引出IO蜂鸣器跳PS/2鼠标键盘三个按键: WAKEUPRESET按键Rs232电源开关 USB 接口 电源指自恢复保MAX232电源芯24c02、5V 电源输出; 线序为: GND/GND/5V BOOT 设置 线序为:GND /GND BOOT1/BOOT0此板子不管硬件还是软件完全无缝接兼容正点原子的MINSTM32,并对MINSTM32进行了完美的升级,让我们用最少的钱做更多的事,具体升级的部分包括:1、C PU的升级利用ST意法半导体的CPU兼容性强的优点,此板采用比STM32F103RBT6性能更强、且完全兼容的的STM32F103RCT6升级CPU,把完美的MINNI STM板子的功能发挥到极致,具体2个CPU的主要资源对比如下:可以看出,FLASH增加了一倍,达到256K,RAM也增加了1倍,让我们不用再为FLASH\RAM小而烦恼,使我们的存储空间更为强大;增加了一个16位普通IC/OC/PWM),2个16位基本(IC/OC/PWM),1个STI,2个USART,这里比STM32F103RB还多了一个DAC通道,这个STM32F103RB是没有的2、由于STM32F103RCT6有多达5个USART,因此在这个开发板上我们增加了个RS485芯片,我们可以进行485通信;3、STM32F103RCT6有多达5个USART,其中有3个支持7816协议,可以实现智能卡的设计,对于想学习、研究、设计智能一卡通的同学最好的选择;4、STM32F103RCT6比STM32F103RBT6多一个DAC通道,我们可以用杜邦线从我们的引出IO引脚上引出引脚,进行学习、设计。
STM32F103RCT6, STM32F103RDT6, STM32F103RET6 引脚功能定义

- -290 -70 180 Degrees
Pin 24
PC4
PC4/ADC12_IN14
I/O - -290 -80 180 Degrees
Pin 25
PC5
PC5/ADC12_IN15
I/O - -290 -90 180 Degrees
Pin 26
PB0
PB0/ADC12_IN8/TIM3_CH3/TIM8_CH2N/ TIM1_CH2N
I/O FT 290 -70 0 Degrees
PA10/USART1_RX/TIM1_CH3
I/O FT 290 -60 0 Degrees
PA11/USART1_CTS/USBDM/CAN_RX/TI M1_CH4
I/O
FT 290 -50 0 Degrees
PA12/USART1_RTS/USBDP/CAN_TX/TI M1_ETR
Pin 11
PC3
PC3/ADC123_IN13
I/O - -290 60 180 Degrees
Pin 12
VSSA
VSSA
Power - -290 50 180 Degrees
Pin 13
VDDA
VDDA
Power - -290 40 180 Degrees
Pin
14
PA0-WKUP
PA0/WKUP/USART2_CTS/ADC123_IN0/T IM2_CH1_ETR/TIM5_CH1/TIM8_ETR
Pin 34
PB13
PB13/SPI2_SCK/I2S2_CK/USART3_CTS/T IM1_CH1N
I/O
FT 290 -150 0 Degrees
MEMORY存储芯片STM32F103RCT6中文规格书
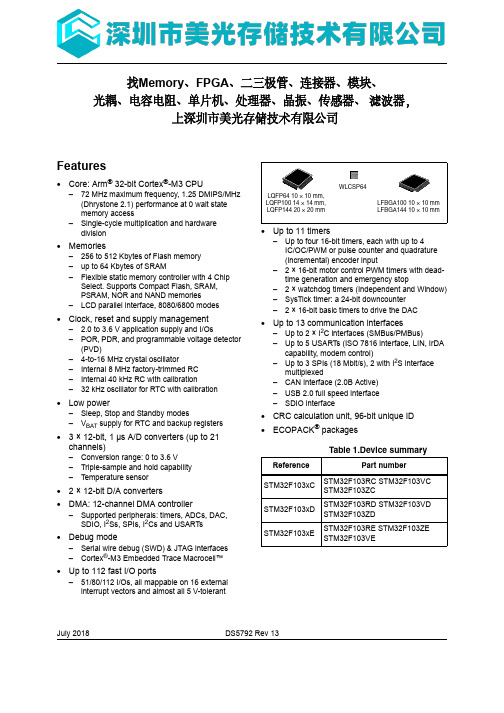
Features•Core: Arm® 32-bit Cortex®-M3 CPU–72 MHz maximum frequency, 1.25DMIPS/MHz (Dhrystone 2.1) performance at 0 wait statememory access–Single-cycle multiplication and hardwaredivision•Memories–256 to 512 Kbytes of Flash memory–up to 64 Kbytes of SRAM–Flexible static memory controller with 4 Chip Select. Supports Compact Flash, SRAM,PSRAM, NOR and NAND memories–LCD parallel interface, 8080/6800 modes •Clock, reset and supply management – 2.0 to 3.6V application supply and I/Os–POR, PDR, and programmable voltage detector (PVD)–4-to-16 MHz crystal oscillator–Internal 8 MHz factory-trimmed RC–Internal 40 kHz RC with calibration–32 kHz oscillator for RTC with calibration •Low power–Sleep, Stop and Standby modes–V BAT supply for RTC and backup registers • 3 × 12-bit, 1 µs A/D converters (up to 21channels)–Conversion range: 0 to 3.6 V–Triple-sample and hold capability–Temperature sensor• 2 × 12-bit D/A converters•DMA: 12-channel DMA controller–Supported peripherals: timers, ADCs, DAC, SDIO, I2Ss, SPIs, I2Cs and USARTs •Debug mode–Serial wire debug (SWD) & JTAG interfaces–Cortex®-M3 Embedded Trace Macrocell™•Up to 112 fast I/O ports–51/80/112 I/Os, all mappable on 16 external interrupt vectors and almost all 5V-tolerant •Up to 11 timers–Up to four 16-bit timers, each with up to 4IC/OC/PWM or pulse counter and quadrature(incremental) encoder input– 2 × 16-bit motor control PWM timers with dead-time generation and emergency stop– 2 × watchdog timers (Independent and Window)–SysTick timer: a 24-bit downcounter– 2 × 16-bit basic timers to drive the DAC•Up to 13 communication interfaces–Up to 2 × I2C interfaces (SMBus/PMBus)–Up to 5 USARTs (ISO 7816 interface, LIN, IrDA capability, modem control)–Up to 3 SPIs (18 Mbit/s), 2 with I2S interface multiplexed–CAN interface (2.0B Active)–USB 2.0 full speed interface–SDIO interface•CRC calculation unit, 96-bit unique ID •ECOPACK® packagesTable 1.Device summary Reference Part numberSTM32F103xCSTM32F103RC STM32F103VCSTM32F103ZCSTM32F103xDSTM32F103RD STM32F103VDSTM32F103ZDSTM32F103xESTM32F103RE STM32F103ZESTM32F103VE找Memory、FPGA、二三极管、连接器、模块、光耦、电容电阻、单片机、处理器、晶振、传感器、滤波器,上深圳市美光存储技术有限公司July 2018DS5792 Rev 13STM32F103xC, STM32F103xD, STM32F103xE Electrical characteristicsElectrical characteristics STM32F103xC, STM32F103xD, STM32F103xEDS5792 Rev 135.3 Operating conditions5.3.1General operating conditionsTable 9. Thermal characteristicsSymbol RatingsValue Unit T STG Storage temperature range –65 to +150°C T JMaximum junction temperature150°CTable 10. General operating conditionsSymbol ParameterConditionsMin Max Unitf HCLK Internal AHB clock frequency -0 72MHz f PCLK1Internal APB1 clock frequency -0 36f PCLK2Internal APB2 clock frequency -0 72V DDStandard operating voltage -2 3.6V V DDA (1)1.When the ADC is used, refer to Table 59: ADC characteristics .Analog operating voltage(ADC not used)Must be the same potential as V DD (2)2.It is recommended to power V DD and V DDA from the same source. A maximum difference of 300mVbetween V DD and V DDA can be tolerated during power-up and operation.2 3.6VAnalog operating voltage (ADC used)2.43.6V BATBackup operating voltage- 1.8 3.6V P DPower dissipation at T A = 85°C for suffix 6 or T A = 105°C for suffix 7(3)3.If T A is lower, higher P D values are allowed as long as T J does not exceed T J max (see Table 6.7: Thermalcharacteristics on page 132).LQFP144-666mW LQFP100-434LQFP64-444LFBGA100-500LFBGA144-500WLCSP64-400T AAmbient temperature for 6 suffix versionMaximum power dissipation -4085°C Low-power dissipation (4)4.In low-power dissipation state, T A can be extended to this range as long as T J does not exceed T J max (seeTable 6.7: Thermal characteristics on page 132).-40105Ambient temperature for 7 suffix versionMaximum power dissipation -40105°CLow-power dissipation (4)-40125T JJunction temperature range6 suffix version -40105°C7 suffix version-40125STM32F103xC, STM32F103xD, STM32F103xE Electrical characteristics5.3.2 Operating conditions at power-up / power-downThe parameters given in Table 11 are derived from tests performed under the ambienttemperature condition summarized in Table 10.Table 11. Operating conditions at power-up / power-downSymbol ParameterConditionsMin Max Unit t VDDV DD rise time rate -0∞µs/VV DD fall time rate20∞Electrical characteristics STM32F103xC, STM32F103xD, STM32F103xE5.3.4 Embedded reference voltageThe parameters given in Table 13 are derived from tests performed under ambienttemperature and V DD supply voltage conditions summarized in Table 10.Table 13. Embedded internal reference voltageSymbol ParameterConditions Min Typ Max Unit V REFINTInternal reference voltage –40 °C < T A < +105 °C 1.16 1.20 1.26V–40 °C < T A < +85 °C1.16 1.20 1.24T S_vrefint(1)1.Shortest sampling time can be determined in the application by multiple iterations.ADC sampling time when reading the internal reference voltage-- 5.117.1(2)2.Guaranteed by design.µsV RERINT(2)Internal reference voltage spread over the temperature rangeV DD = 3 V ±10 mV--10mV T Coeff (2)Temperature coefficient---100ppm/°C。
stm32f103rct6程序例子
stm32f103rct6程序例子以stm32f103rct6程序例子为题,我们来介绍一些关于该例子的内容。
1. 引言在这个例子中,我们将使用stm32f103rct6微控制器来实现一个简单的LED闪烁程序。
该程序将通过设置GPIO引脚状态来控制LED的亮灭。
2. 初始化设置我们需要进行初始化设置。
我们将使用stm32的库函数来配置GPIO 引脚和时钟。
代码如下:```c#include "stm32f10x.h"void GPIO_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOC, &GPIO_InitStructure);}```在上述代码中,我们使用GPIOC的第13号引脚作为输出引脚,并将其配置为推挽输出模式。
3. 主函数接下来,我们将在主函数中实现LED闪烁的逻辑。
代码如下:```cint main(void){GPIO_Init();while(1){GPIO_SetBits(GPIOC, GPIO_Pin_13);Delay(1000000);GPIO_ResetBits(GPIOC, GPIO_Pin_13);Delay(1000000);}}```在上述代码中,我们使用GPIO_SetBits()函数将GPIOC的第13号引脚设置为高电平,从而点亮LED。
然后,我们使用Delay()函数进行延时,以保持LED亮的时间。
stm32f103rct6单片机工作原理
stm32f103rct6单片机工作原理STM32F103RCT6 单片机工作原理简介STM32F103RCT6 是一款由意法半导体(STMicroelectronics)推出的高性能、低功耗的ARM Cortex-M3 内核的32位单片机。
什么是单片机单片机(Microcontroller)是一种集成电路芯片,内部包含处理器核心、存储器、输入输出端口以及各种外设接口等多个功能模块。
相比于传统的微处理器,单片机具有体积小、功耗低、集成度高等优点,因此广泛应用于嵌入式系统中。
单片机的工作原理单片机在工作时,首先需要将程序代码加载到它的存储器中,并通过处理器核心的执行来完成各种任务。
单片机的工作原理可以简单概括为以下几个步骤:1.初始化:单片机上电后,首先执行初始化操作,包括对时钟系统、各种外设和寄存器进行配置等。
2.程序执行:单片机根据存储器中的指令逐条执行,并按照程序设计完成各种功能。
3.信号输入输出:单片机通过输入输出端口与外部环境进行数据交互,接收外部信号并控制外部设备。
4.中断处理:当发生外部事件需要中断处理时,单片机会立即响应并执行特定的中断服务程序。
STM32F103RCT6 单片机的特点STM32F103RCT6 单片机作为一款高性能的嵌入式系统控制器,具有以下主要特点:•基于ARM Cortex-M3 内核,运行速度快,指令集丰富;•集成了丰富的外设接口,包括通用输入输出端口、串口、SPI、I2C、定时器等;•支持低功耗模式,适合电池供电和功耗要求严格的应用;•内置Flash 存储器,可存储程序代码和数据;•强大的开发环境和工具链支持。
STM32F103RCT6 单片机的工作流程要正确使用STM32F103RCT6 单片机,我们需要了解其工作流程,一般包括以下几个步骤:1.初始化系统配置:包括时钟系统的配置、中断系统的初始化、外设的初始化等。
这些配置会直接影响到单片机的工作效率和正确性。
STM32F103RCT6之FLASH读写操作

STMFLASH_Lock();//操作结束后,锁定 } 10、从指定的地址读指定长度的数据 void STMFLASH_Read(u32 ReadAddr,u16 *pBuffer,u16 NumToRead)
{ u16 i; for(i=0;i { pBuffer[i]=STMFLASH_ReadHalfWord(ReadAddr);//读取改地址数据 ReadAddr+=2;// 一次读取两字节的数据,因此地址要相应的+2 } } 以上是根据正点原子迷你 STM32 开发板的历程做的解析,其实懂得了 操作原理后,完全可以自己去写了。
STM32F103RCT6 之 FLASH 读写操作
一、STM32F103 的 FLASH 简介 1、如图所示,STM32F103 内部 FLASH 存储区分为三个区域:主存储 区、信信息块和闪存存储器接口寄存器。 储存储区是我们读写 FLASH 的主要的存储区,MCU 程序以及一些需要 掉电保存的数据都是存储在这个区域的。 信息快:程序启动代码被存储在这部分。 最后的寄存器则是 FLASH 读写需要配置的一些寄存器位置。
} 4、等待操作完成函数
u8 STMFLASH_WaitDone(u16 time) { u8 res; do { res=STMFLASH_GetStatus();//读取 FLASH 状态是否处于忙碌状态 if(res!=1)break;//非忙碌状态则 break
delay_us(1);
time--; }while(time); if(time==0)res=0xff;//TIMEOUT 超时了,res 等于 0xff return res;//操作完成返回 0
主存储器的起始位置 0x08000000,除去程序占用的空间,剩余部分就可 以作为数据保存的区域了,所以在利用内部 FLASH 存储数据的时候, 一定不要占用程序本身所占用的空间,否则会导致死机。
STM32F103RCT6引脚功能及使用

STM32F103RCT6引脚功能及使用脚号引脚名称主功能默认复用重定义备注1VBAT VBAT----说明1 2PC13-TAMPER-RTC PC13TAMPER-RTC--说明3 3PC14-OSC32_IN PC14OSC32_IN--说明3 4PC15-OSC32_OUT PC15OSC32_OUT--说明3 5OSC_IN OSC_IN--CAN_RX晶振6OSC_OUT OSC_OUT--CAN_TX晶振7NRST NRST----复位8PC0PC0ADC123_IN10--ADC 9PC1PC1ADC123_IN11--ADC 10PC2PC2ADC123_IN12--ADC 11PC3PC3ADC123_IN13--ADC 12VSSA VSSA----模拟地13VDDA VDDA----模拟电14PA0-WKUP PA0WKUP--说明4 USART2_CTS说明5 ADC123_IN0TIM2_CH1_ETR说明6 TIM5_CH1TIM8_ETR15PA1PA1USART2_RTS--ADC123_IN1TIM2_CH2TIM5_CH216PA2PA2USART2_TX--ADC123_IN2TIM2_CH3TIM5_CH317PA3PA3USART2_RX--ADC123_IN3TIM2_CH4TIM5_CH418VSS_4VSS_4----数字地19VDD_4VDD_4----数字电20PA4PA4USART2_CK--ADC12_IN4SPI1_NSSDAC_OUT121PA5PA5ADC12_IN5--SPI1_SCKDAC_OUT222PA6PA6ADC12_IN6TIM1_BKIN TIM3_CH1TIM8_BKINSPI1_MISO23PA7PA7ADC12_IN7TIM1_CH1N TIM3_CH2TIM8_CH1NSPI1_MOSI24PC4PC4ADC12_IN14--25PC5PC5ADC12_IN15--26PB0PB0ADC12_IN8TIM1_CH2N TIM3_CH3TIM8_CH2N27PB1PB1ADC12_IN9TIM1_CH3N TIM3_CH4TIM8_CH3N28PB2PB2----BOOT129PB10PB10USART3_TXTIM2_CH3 I2C2_SCL30PB11PB11USART3_RXTIM2_CH4 I2C2_SDA31VSS_1VSS_1----数字地32VDD_1VDD_1----数字电33PB12PB12USART3_CK--TIM1_BKINSPI2_NSS说明7 I2C2_SMBAI2S2_WS34PB13PB13USART3_CTS--TIM1_CH1NSPI2_SCKI2S2_CK35PB14PB14USART3_RTS--TIM1_CH2NSPI2_MISO36PB15PB15TIM1_CH3N--SPI2_MOSII2S2_SD37PC6PC6TIM8_CH1TIM3_CH1I2S2_MCKSDIO_D6说明838PC7PC7TIM8_CH2NTIM3_CH2 I2S3_MCKSDIO_D739PC8PC8TIM8_CH3NTIM3_CH3 SDIO_D040PC9PC9TIM8_CH4TIM3_CH4 SDIO_D141PA8PA8USART1_CK--TIM1_CH1MCO42PA9PA9USART1_TX--TIM1_CH243PA10PA10USART1_RX--TIM1_CH344PA11PA11USART1_CTS--TIM1_CH4USBDMCAN_RX45PA12PA12USART1_RTS--TIM1_ETRUSBDPCAN_TX46PA13JTMS--PA13 SWDIO47VSS_2VSS_2----数字地48VDD_2VDD_2----数字电49PA14JTCK--PA14SWCLK50PA15JTDI SPI3_NSS PA15I2S3_WSTIM2_CH1_ETRSPI1_NSS51PC10PC10UART4_TX USART3_TXSDIO_D252PC11PC11UART4_RX USART3_RXSDIO_D353PC12PC12UART5_TX USART3_CKSDIO_CK54PD2PD2UART5_RX--TIM3_ETRSDIO_CMD55PB3JTDO SPI3_SCKPB3TIM2_CH2 I2S3_CKSPI1_SCKTRACESWO56PB4NJTRST SPI3_MISOPB4 TIM3_CH1 SPI1_MISO57PB5PB5SPI3_MOSI TIM3_CH2 I2C1_SMBASPI1_MOSI I2S3_SD58PB6PB6TIM4_CH1USART1_TXI2C1_SCL59PB7PB7TIM4_CH2USART1_RXI2C1_SDA60BOOT0BOOT0----61PB8PB8TIM4_CH3I2C1_SCL SDIO_D4CAN_RX62PB9PB9TIM4_CH4I2C1_SDA SDIO_D5CAN_TX63VSS_3VSS_3----数字地64VDD_3VDD_3--数字电说明:1)VBAT:VBAT给RTC和备份区域供电,目的是在VDD断电时保证相关区域的数据内容有效,一般连接到外部电池。
STM32F103RCT6芯片IO口模式个人理解
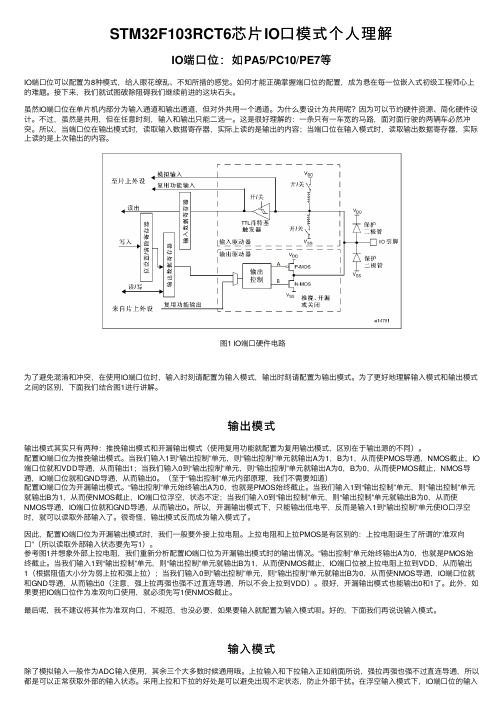
STM32F103RCT6芯⽚IO⼝模式个⼈理解IO端⼝位:如PA5/PC10/PE7等IO端⼝位可以配置为8种模式,给⼈眼花缭乱、不知所措的感觉。
如何才能正确掌握端⼝位的配置,成为悬在每⼀位嵌⼊式初级⼯程师⼼上的难题。
接下来,我们就试图破除阻碍我们继续前进的这块⽯头。
虽然IO端⼝位在单⽚机内部分为输⼊通道和输出通道,但对外共⽤⼀个通道。
为什么要设计为共⽤呢?因为可以节约硬件资源、简化硬件设计。
不过,虽然是共⽤,但在任意时刻,输⼊和输出只能⼆选⼀。
这是很好理解的:⼀条只有⼀车宽的马路,⾯对⾯⾏驶的两辆车必然冲突。
所以,当端⼝位在输出模式时,读取输⼊数据寄存器,实际上读的是输出的内容;当端⼝位在输⼊模式时,读取输出数据寄存器,实际上读的是上次输出的内容。
图1 IO端⼝硬件电路为了避免混淆和冲突,在使⽤IO端⼝位时,输⼊时刻请配置为输⼊模式,输出时刻请配置为输出模式。
为了更好地理解输⼊模式和输出模式之间的区别,下⾯我们结合图1进⾏讲解。
输出模式输出模式其实只有两种:推挽输出模式和开漏输出模式(使⽤复⽤功能就配置为复⽤输出模式,区别在于输出源的不同)。
配置IO端⼝位为推挽输出模式。
当我们输⼊1到“输出控制”单元,则“输出控制”单元就输出A为1,B为1,从⽽使PMOS导通,NMOS截⽌,IO 端⼝位就和VDD导通,从⽽输出1;当我们输⼊0到“输出控制”单元,则“输出控制”单元就输出A为0,B为0,从⽽使PMOS截⽌,NMOS导通,IO端⼝位就和GND导通,从⽽输出0。
(⾄于“输出控制”单元内部原理,我们不需要知道)配置IO端⼝位为开漏输出模式。
“输出控制”单元始终输出A为0,也就是PMOS始终截⽌。
当我们输⼊1到“输出控制”单元,则“输出控制”单元就输出B为1,从⽽使NMOS截⽌,IO端⼝位浮空,状态不定;当我们输⼊0到“输出控制”单元,则“输出控制”单元就输出B为0,从⽽使NMOS导通,IO端⼝位就和GND导通,从⽽输出0。
stm32f103rct6使用内部晶振作为时钟源

stm32f103rct6使用内部晶振作为时钟源STM32F103RCT6是一款常用的ARM Cortex-M3内核微控制器,常常需要使用外部晶振作为时钟源来提供准确的时钟。
但实际上,STM32F103RCT6也可以使用内部晶振作为时钟源,取代外部晶振的使用。
本文将详细介绍STM32F103RCT6使用内部晶振的方法。
1. 内部RC振荡器STM32F103RCT6芯片内置了一个1MHz的RC振荡器,这是用于CPU、外设与Flash存储器的内部时钟源。
在复位时,MCU自动将内部RC振荡器作为系统时钟源,并且系统时钟频率为8MHz。
如果你不想使用外部晶振,并且不需要更快的时钟速度,那么内部RC晶振是一个简便、可靠的选择。
2. 改变系统时钟源如果要将内部RC振荡器作为时钟源,只需改变系统时钟源即可。
STM32F103RCT6有两种类型的时钟源:内部时钟源(HSI)和外部时钟源(HSE)。
通过改变时钟源,MCU就可以使用不同的晶振或振荡器作为时钟源。
使用内部晶振作为时钟源的步骤如下:(1)首先需要打开内部RC振荡器,可以使用如下代码:RCC_HSICmd(ENABLE);(2)接下来需要将HSI设置为系统时钟源:RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);这时系统时钟源就由外部晶振改变为内部RC晶振。
在MCU工作时,请确保输入电压符合数据手册中给出的要求,否则会导致MCU运行不稳定或损坏。
3. 选择合适的外设时钟源内部和外部时钟源可以被用作所有的外设的时钟源,但是需要注意使用每个外设时钟源时的时钟速度。
例如,如果你想让USART1外设运行在115200bps的速率下,那么这个外设需要使用8MHz的时钟速度。
这时就需要配合使用时钟计算器来计算。
如果需要不同的外设使用不同的时钟速度,那么需要分别进行配置。
4. 总结STM32F103RCT6内置了一个1MHz的内部RC振荡器作为系统时钟源。
STM32F103RCT6引脚功能及使用
STM32F103RCT6引脚功能及使用1.引脚定义:STM32F103RCT6一共有64个引脚,标有PA0~PA15、PB0~PB15、PC0~PC15、PD0~PD15、PE0~PE15等标识。
2.引脚功能:STM32F103RCT6引脚可以设置不同的功能,包括GPIO(通用输入输出)、外部中断、定时器、串口通信、SPI、I2C等。
3.引脚复用:STM32F103RCT6支持引脚的复用功能,通过将引脚配置为不同的复用功能,实现不同的外设功能。
比如可以将一些引脚配置为串口1的TX功能,将另一个引脚配置为串口1的RX功能。
4.引脚模式设置:对于GPIO引脚,可以设置为输入模式、输出模式或者复用功能模式。
输入模式可以获取外部信号并进行处理,输出模式可以控制外部设备。
5.引脚中断:STM32F103RCT6芯片支持外部中断功能,可以通过配置一些引脚为外部中断输入来实现外部中断的响应。
当外部信号引发中断时,芯片可以立即执行中断服务程序。
6.引脚状态检测:通过读取引脚的状态,可以检测引脚的逻辑电平,从而判断外部信号的状态。
7.引脚驱动能力:对于输出引脚,可以设置不同的驱动能力,以适应不同电平或者负载要求。
8.引脚电平转换:STM32F103RCT6芯片支持5V和3.3V两种电平转换方式,可以通过引脚配置来实现。
9.引脚数据通信:除了GPIO功能外,STM32F103RCT6芯片还支持多种串口通信协议,包括UART、SPI、I2C等。
这些通信协议可以通过引脚配置来实现。
总之,STM32F103RCT6芯片具有丰富的引脚功能,能够满足不同应用场景的需求。
用户可以根据具体的应用要求,通过配置芯片的引脚功能和模式,实现对外设的控制和通信。
同时,使用STM32系列的开发工具和文档,可以方便地进行开发和调试。
基于STM32F103RCT6车牌识别系统

基于STM32F103RCT6车牌识别系统【摘要】课题研究设计了一款基于STM32单片机的自动车牌识别信息系统。
主要软件包含一个STM32主控控制芯片,2.8寸的TFT三型液晶图像显示控制模块,摄像头采集控制模块(OV7670),指示灯控制,电源,蜂鸣器报警模块,按键等模块组成。
系统内部采用5v直流电源通过一个AMS1117芯片电压转换器作为3.3v光源电压为整个监控系统进行供电。
然后可以利用STM32F103RCT6等微控制器的OV7670摄像头自动采集车牌图像,通过模式识别,匹配,最后可以获得整个车牌管理信息并在一个TFT的液晶屏上实时进行数字显示,同时可以显示车牌计算机和收费,最后可以完成对整个车牌系统管理功能图的实现。
同时显示计算收费,最后完成对整个系统功能实现。
这个设计可以实现车牌的识别,可以应用与道路交通车牌识别,停车场车牌识别计时收费,小区车牌识别等实际情景当中。
关键词:STM32F103RCT6;TFT液晶显示;OV7670;AbstractA automatic license plate recognition information system based on STM32 single-chip microcomputer is studied and designed. The main software includes a STM32 main control chip,a 2.8-inch TFT liquid crystal image display control module, a camera acquisition control module(OV7670), indicator light control, power supply,buzzer alarm module,buttons and other modules.The system adopts a other modules. The system adopts a 5V DC power supply to power the whole monitoring system through an AMS1117 chip voltage converter as a 3.3v light source voltage.Then you can use OV7670 cameras of micro controllers such as STM32F103RCT6 to automatically collect license plate images, pass mode recognition, match,and finally obtain the whole license plate management information and digital display it in real time on a TFT LCD screen. At the same time, the license plate computer and At the end, the implementation of the whole license plate system management function diagram can be completed.At the same time, show the calculated fees and finally complete the implementation of the whole system function. This design can realize license plate recognition, can be applied to practical situations such as road traffic license plate recognition, parking lot license plate recognition time charge,community license plate recognition and other practical scenarios.Key words: STM32F103RCT6; TFT liquid crystal display; OV767目录引言 (1)一、系统的整体研究方案........................................................... 错误!未定义书签。
stm32f103rct6中文资料_数据手册_参数

家庭:嵌入式-微控制器 系列:STM32 芯体尺寸:32-位 速度:72MHz 连通性:CAN,I2C,IrDA,LIN,SPI,UART/USART,USB 外围设备:DMA,电机控制PWM,PDR,POR,PVD,PWM,温度传感器,WDT 输入/输出数:51 程序存储器容量:256KB (256K x 8) RAM容量:48K x 8 电压-电源(Vcc/Vdd):2 V ~ 3.6 V 振荡器型:内部 工作温度:-40°C ~ 85°C 封装/外壳:64-LQFP 包装:托盘 STM32F103RCT6是一种嵌入式-微控制器的集成电路(IC),是由ST公司开发的STM32F103RCT6系列的其中一种,芯体尺寸是32位,速度是72MHz,程序存储器容 量是256KB,程序存储器类型是FLASH,RAM容量是48K。 STM32F103F103通过I/O 接口与TFT液晶模块相连接,虽然很多的TFT液晶模块中内置的液晶屏控制器都支持SPI 接口通信(如ILI9325)但由于SPI传输速度较慢不利 于液晶数据的快速传输,因此很多液晶模块都选择采用并口通信。 其中PB0-PB15分别与D0-D15相连作为数据通信口,PA0、PA4、PA5、PA6、PA7 分别连接RESET、CS、RS、WR、RD,作为控制口,实现复位、片选、指令数 据切换、读写等控制功能。 软件部分的编程采用C语言,一方面主要完成STM32F103对I/O 管脚的配置,用来实现对四线电阻触摸屏端子状态的控制,通过中断方 式检测是否有触摸信息,配置A/D转换通道,读入电压根据公式计算出触点坐标。另一方面主要完成通过与TFT液晶模块的通信控制,实现触摸点坐标与液晶屏坐 标的对应并有效完成显示任务。软件的开发环境是MDK,MDK 将ARM 开发工具RealView DevelopmentSuite(简称为RVDS)的编译器RVCT与Keil的工程管理、调试 仿真工具集成在一起,支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模拟,性能分析等功能,与 ARM 之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%.本文提出了基于STM32F103RCT6单片机的EMS液晶显示触摸屏的设计方 案。STM32F103F103的高速、低耗的优越性能完全可以达到触摸屏的主控制芯片要求,TFT液晶显示器可以满足更复杂、多彩、灵活的显示任务,符合显示屏性能 不断攀升的发展趋势。本设计充分利用了STM32F103芯片的优势,抛弃了传统触摸屏控制器控制触摸屏的方案,利用自身A/D完成了触摸屏功能,本方案大大简化 了硬件电路结构,通信更可靠,编程也更加简洁,最终既能达到EMS显示要求,出色地显示和设置了系统所需要的数据,又能降低系统的成本,通过实际使用达到 了良好的效果。鉴于当前电动车的快速发展,本方案可以拥有不错的应用前景。
基于STM32F103RCT6两轮自平衡小车设计

设计思路
设计思路
两轮自平衡小车的设计主要包括底盘、动力系统、平衡系统等几个关键部分。 底盘设计:小车的底盘应具有足够的刚性和稳定性,以支撑上部结构并保持 平衡。我们选择铝合金材料制作底盘,并使用精密加工技术确保其精度和稳定性。
设计思路
动力系统设计:动力系统包括电机、电调、电池等组件,为小车提供运动所 需的能量。我们采用无刷电机作为驱动源,通过电子调速器(电调)控制电机转 速,实现小车的运动控制。
参考内容
引言
引言
智能小车作为移动机器人的一种形式,具有广泛的应用前景和研究价值。随 着嵌入式系统、传感器和技术的不断发展,智能小车的性能和功能也不断提升。 本次演示旨在基于STM32F103单片机设计一款智能小车,并实现对其速度和方向 的控制,提高小车的自主性和适应性。
关键词
关键词
智能小车、STM32F103单片机、传感器、控制算法、自主性、适应性
为了验证小车的性能和稳定性,我们进行了多项测试,包括平衡性测试、稳 定性测试等。
平衡性测试:我们通过在光滑的地面上和小型障碍物上测试小车的平衡性能, 发现小车能够在不同情况下保持稳定平衡状态。
测试与结果
稳定性测试:我们对小车进行了不同速度和不同地形条件的稳定性测试,以 检验小车在不同情况下的稳定性能。测试结果显示,小车在各种条件下均具有较 好的稳定性。
实现方法
硬件制作:硬件制作包括底盘和车轮的制作、电路板的焊接和传感器元件的 安装等。我们利用铝合金材料制作底盘,精确加工车轮,并在电路板上焊接了电 源管理芯片、电机驱动芯片和传感器接口电路。在制作过程中,我们注意保证各 部分的装配精度和连接可靠性,以确保小车的稳定性和耐用性。
测试与结果
测试与结果
细节描述
STM32F103RCT6的基本定时器

STM32F103RCT6的基本定时器1、定时器的分类 STM32F103ZET6总共有8个定时器,它们是:TIM1~TIM8。
STM32的定时器分为基本定时器、通⽤定时器和⾼等定时器。
TIM6、TIM7是基本定时器。
基本定时器是只能向上计数的16位定时器,基本定时器只能有定时的功能,没有外部IO⼝,所以没有捕获和⽐较通道。
TIM2、TIM3、TIM4、TIM5是通⽤定时器。
通⽤定时器是可以向上计数,也可以向下计数的16位定时器。
通⽤定时器可以定时、输出⽐较、输⼊捕捉,每个通⽤定时器具有4个外部IO⼝。
TIM1、TIM8是⾼等定时器。
⾼等定时器是是可以向上计数,也可以向下计数的16位定时器。
⾼等定时器可以定时、输出⽐较、输⼊捕捉、还可以输出三相电机互补信号,每个⾼等定时器有8个外部IO⼝。
定时器分类图如下:2、基本定时器 基本定时器没有外部IO⼝,所以它只有定时的功能。
基本定时器只能向上计数,也就是说基本定时器只能递增计数。
基本定时器功能框图如下: 从功能图的1中可以看到,基本定时器的时钟TIMxCLK来⾃内部时钟,该内部时钟为经过APB1预分频器分频后提供的。
基本定时器跟APB1总线时钟的关系如下:如果APB1预分频系数为1,则基本定时器的时钟等于APB1总线时钟。
如果APB1预分频系数不为1,则基本定时器的时钟等于APB1总线时钟经过分频后的2倍。
⽐如APB1总线经过2分频后的时钟为36MHZ,那么基本定时器的时钟就是72MHZ3(36*2)。
功能图中的2是⼀个预分频器,来⾃内部的时钟经过预分器分频后的时钟,⽤来驱动基本定时器的计数器计数。
基本定时器的预分频器是⼀个16位的预分频器,预分频器可以对定时器时钟进⾏1~65536之间的任何⼀个数进⾏分频。
计算⽅式如下: 定时器⼯作时钟 = 来⾃APB1的时钟/(预分频系数+1) 功能图中的3是⼀个16位的计数器,该计数器能能向上计数,最⼤计数值位65535。
stm32f103rct6单片机毕业设计

stm32f103rct6单片机毕业设计
对于stm32f103rct6单片机的毕业设计,您可以考虑以下几个
方向:
1. 基于stm32f103rct6单片机的智能家居控制系统:设计一个
可以通过手机APP等方式控制家居设备(如灯光、电视、空
调等)的智能家居控制系统。
可以通过单片机的 GPIO口和UART通信来实现与设备的通信,并且可以在手机APP中进
行设备的远程控制。
2. 基于stm32f103rct6单片机的智能车辆导航系统:设计一个
智能车辆导航系统,利用单片机的ADC功能获取车辆的实时
位置信息并通过OLED显示屏显示。
同时利用单片机的
UART通信功能与GPS模块进行通信,获取车辆的导航信息,然后根据导航信息控制车辆的方向,并在OLED显示屏上显
示导航的路径及指示。
3. 基于stm32f103rct6单片机的无线传感器网络:设计一个利
用无线传感器网络来进行环境监测的系统。
通过单片机的SPI
通信功能与多个无线传感器节点进行通信,获取环境参数(如温度、湿度等),然后通过无线网络将这些数据传输到一个基站节点,再将数据保存到Flash存储器,并可以通过串口或无
线通信将数据传输到上位机,并通过上位机对数据进行分析和显示。
以上仅是一些示例,您可以根据自己的兴趣和能力进行选择和改进。
希望对您的毕业设计有所帮助!。