arm第七次课
成都2024年10版小学三年级下册第七次英语第2单元测验卷
成都2024年10版小学三年级下册英语第2单元测验卷考试时间:60分钟(总分:120)考试人:_________题号一二三总分得分评级介绍:本试卷为成都2024年版小学三年级下册第七次英语测验,主要考查学生对第二单元的理解与运用。
难度适中,重点关注词汇和简单句型的运用。
一、(选择题)总分:45分(1分/题)1、跟新朋友第一次见面,应该说:_________。
A, Nice to meet you.B, How are you?C,Good afternoon!2、What do we call the sound a cat makes?A, BarkB, MeowC, RoarD, Quack3、What is the main function of the lungs?A, Pump bloodB, Digest foodC, BreatheD, Produce hormones4、What do we call an animal that lives both on land and in water?A, TerrestrialB, AquaticC, Amphibian5、What part of the plant holds it up?植物的哪个部分支撑它?A, RootsB, StemC, LeavesD, Flowers6、Which sport uses a bat and a ball?A, BasketballB, SoccerC, BaseballD, Tennis7、What do we call the person who plays a musical instrument? A, SingerB, MusicianC, DancerD, Actor8、选出下列各组单词中与其他两项不同类的一项。
9、What do you call a place where you can see wild animals? A, ZooB, FarmC, AquariumD, Park10、Which of these is a form of transportation that flies?A, TrainB, BusC, AirplaneD, Car11、What is the English word for "鱼"?A, MeatB, FishC, ChickenD, Seafood12、What do you call the place where you buy groceries?中文解释:买食品杂货的地方叫什么?A, SupermarketB, RestaurantC, Bakery13、What is the English word for "植物科学研究平台"?A, Plant science research platformB, Agricultural platformC, Environmental platformD, Ecological platform14、What do we call the process by which plants take in nutrients?中文解释:我们称植物吸收养分的过程为?A, AbsorptionB, TranspirationC, Digestion15、What do we call the language spoken in France?A, SpanishB, FrenchC, ItalianD, German16、What is the English word for "盐"?A, SugarB, SpiceC, SaltD, Pepper17、She is wearing a blue hat. 她戴着一顶蓝色的帽子。
船厂工人常用英语

造船知识扫盲系列-船厂工人常用英语第一课船舶名称1.船舶工程Ship engineering2.船舶Ship, Vessel3.艇Boat, Craft4.商船Merchant ship, Commercial ship5.运输船Transport ship6.客船Passenger ship7.客货船Passenger-cargo ship8.货船Cargo ship, Freighter, Cargo carrier9.干货船Dry cargo ship10 杂货船General cargo ship11 多用途货船Multipurpose cargo ship12 散货船Bulk carrier, Bulk cargo ship13 运煤船Coal carrier14 运木船Timber carrier, Log carrier15 矿砂船Ore carrier16 液货船Tanker, Liquid cargo17 油船Oil tanker, Oil carrier18 成品油轮Product carrier19 穿梭油轮Shuttle tanker20 滚装船Roll on-Roll off ship, Ro-Ro ship21 集装箱船Container ship22 载驳船Barge carrier, Lighter aboard ship23 渡船Ferry24 驳船Barge, Lighter第二课船舶总布置甲板及舱室1,总布置General arrangement2,舱室布置Interior arrangement3,机舱布置Engine room arrangement 4,梯道布置Stair way and passage way arrangement5,舱Compartment6,舱室Space7,艏尖舱Fore peak 8,艉尖舱After peak9,底边舱Bottom side tank10 顶边舱Top side tank11 边舱Wink tank12 底舱Hold13 双层底舱Double bottom tank14 深舱Deep tank15 甲板间舱Between deck space16 空隔舱Cofferdam17 罗经甲板Compass deck18 驾驶甲板Navigation deck, Bridge deck19 艇甲板Boat deck20 游步甲板Promenade deck21 起居甲板Accommodation deck22 直升机甲板Helicopter deck23 上甲板Upper deck24 起货机甲板Winch platform25 通道Passage, Alleyway26 内通道Interior alleyway27 外通道Exterior passage way28 跳板Ramp29 驾驶室Wheel house, Navigation bridge30 海图室Chart room31 报务室Radio room32 雷达室Radar room33 机舱Engine room34 锅炉室Boiler room35 泵舱Pump room36 锚链舱Chain locker37 舵机舱Steering engine room38 通风机室Fan room39 消防控制室Fire-control room40 桅室Mast room41 声呐室Sonar transducer space42 机修间Work shop43 起居舱室Accommodation living quarter44 居住舱室Cabin45 船长室Captain room46 大副室Chief officer room47 轮机长室Chief engineer room48 大管轮室First engineer room49 船员室Crew room50 客舱Passenger cabin51 货舱Cargo hold, Cargo space52 货油舱Cargo oil tank53 集装箱舱Container hold54 冷藏货舱Refrigerated cargo55 车辆舱Vehicle hold56 液化天然气舱Liquefied natural gas tank57 行李舱Luggage room58 液舱Liquid tank59 燃油舱Fuel oil tank60 滑油舱Lubricating oil tank61 污油舱Sludge tank, Dirty oil tank62 压载水舱Ballast water tank63 淡水舱Fresh water tank64 饮水舱Drinking water tank第三课基本投影面与船舶主要尺度1.船体型表面Molded hull surface2.型排水体积Hull volume3.中站面Mid-station plane 4.基面Base plane5.中线面Center line plane 6.基线Base line7.主尺度Principal dimensions 8.总长Length overall 9.最大长度Extreme length10 垂线间长Length between perpendiculars(Lpp)11 水线长Waterline length12 设计水线长Designed waterline length(Lwl)13 满载水线长Load waterline length14 型宽Molded breadth15 最大宽Extreme breadth16 型深Molded depth17 吃水Draft, Draught18 型吃水Molded draft19 设计吃水Designed draft20 结构吃水Scantling draft21 艏吃水Fore draft22 艉吃水After draft 23 平均吃水Mean draft24 满载吃水Loaded draft25 型线图Lines plan26 艏垂线Forward perpendicular27 艉垂线After perpendicular28 站Ordinate station29 中站Mid-station30 型线Molded lines31 型值表Table of offsets32 横剖面Transverse sections33 水线面Water plane34 纵剖面Longitudinal section35 梁拱Camber第四课油船外观,装置1.船首标志Head mark2.锚Anchor3.首吃水标志Forward draft mark 4.球鼻首Bulbous bow5.中部吃水标志Mid-ship draft mark 6.螺旋桨Propeller7.舵Rudder8.起锚机Windlass9.前桅Fore mast10 通风筒Ventilator11 十字缆柱Cross bite12 甲板部门仓库Deck store13 吊杆Derrick boom14 吊柱Derrick post15 天线桅Antenna pole16 救生艇Life boat17 桥楼Bridge18 雷达桅Radar mast19 烟囱Funnel20 舷梯Accommodation ladder21 货油装载站Loading station22 通用导缆器Universal chock23 水线Draft line24 货油舱口Cargo oil hatch25 货油管Cargo oil pipe第五课尾机型货船1. 舵Rudder2. 螺旋桨Propeller3. 尾锚,大流锚Stream anchor4. 舭龙骨Bilge keel5. 舷梯Accommodation ladder6. 绞缆机Mooring winch7. 双柱系缆桩Ballard8. 导缆孔Fair-leader9. 蔬菜库Vegetable chamber10 天窗Skylight11 烟囱Funnel12 菌型通风筒Mushroom ventilator13 喇叭形通风筒Cowl head ventilator14 救生艇Lifeboat15 吊艇装置Lifting gear16 雷达桅Radar mast17 测向仪天线Direction finder antenna18 航迹灯Range light19 桅顶灯Mast head light20 舷灯Side light21 吊杆柱King post22 起货机Winch23 吊货杆Derrick boom24 吊杆柱Derrick post25 前桅Hatch26 货仓口On-deck girder第六课小型客货船1.螺旋桨Propeller 2.尾柱Stern frame 3.舵Rudder 4.辅助船,小船,舢板Tender5.吊艇柱Boat davit 6.尾灯Stern light 7.旗杆Ensign staff 8.吊锚杆Anchor davit 9.导缆钳Fair-lead10 扇形格子Quadrant grating第七课军舰装置1.首声纳Bow sona 2.锚Anchor 3.导缆钳和首旗杆Fair-lead & Jack staff4.挡浪板,防浪板Wave screen 5.绞盘Capstan 6.高平两用炮Dual purpose gun7.反潜火箭发射器ASROC Launcher8.带缆桩Bitt9.驾驶桥楼Navigation bridge10 高平两用炮中央瞄准仪Director for dual purpose gun11 火炮雷达Fire control system radar12 对空搜索雷达Air search radar13 水面警戒雷达Surface search radar14 烟囱Stack15 桁架桅Lattice mast16 小艇Cutter17 鱼雷发射管Anti-submarine torpedo tube18 鞭状天线Whip aerial19 探照灯Searchlight20 对空发射架Tarter launcher21 舭龙骨Bilge keel22 螺旋桨Propeller23 救生筏箱Life raft container24 舵Rudder25 对空导弹瞄准雷达Tarter anti-air missile guided radar第八课驱逐舰装置1.首旗杆Jack staff2.锚Anchor3.舱口Hatch4.挡(防)浪板Wave screen5.绞盘Capstan6.单管高射炮High angle gun 7.反潜火箭ASROC (Anti-submarine rocket)8.舷梯Accommodation ladder9.驾驶桥楼Navigation bridge 10 机舱中央瞄准仪Direction for machine gun11 信号楼桥Flag deck12 对空搜索雷达Air search radar13 水面警戒雷达Surface search radar14 烟囱Stack15 桁架桅Lattice mast16 小艇Cutter17 鱼雷发射管Torpedo tube18 鞭状天线Whip aerial19 探照灯Searchlight20 吊车Crane21 舭龙骨Bilge keel22 声纳导流罩Sona dome23 救生筏Life raft24 整流尾鳍Skeg25 尾轴架Shaft bracket26 螺旋桨Propeller27 螺旋桨护栏Propeller guard28 舵Rudder29 带缆桩Bollard30 直升机库Helicopter hanger31 直升机甲板Helicopter deck32 闭式导缆钳Closed fair-lead33 导缆钳Fair-lead34 尾旗杆Ensign staff35 海军军旗Naval ensign第九课船体结构名称1.中内龙骨Center girder2.旁内龙骨Side girder3.船底纵骨Bottom longitudinal 4.内底纵骨Top longitudinal of double bottom5.实肋板Solid floor6.龙骨底板Keel7.A列板,龙骨翼板 A strake8.船底外板Bottom plating 9.舭列板Bilge strake10 舷侧外板Side plating11 舷顶次列板Top side strake12 舷顶列板Sheer strake13 内底板Inner bottom plating14 舭肋板Tank side bracket15 内底缘板扣板Gusset plate16 内舱肋骨Hold frame17 甲板间肋骨Between deck frame18 第二层甲板梁Second deck beam 19 梁肘板Beam bracket20 第二层甲板Second deck21 上甲板Upper deck22 甲板边板Stringer plate23 肋骨肘板Tripping bracket24 强横梁Deck transverse beam25 甲板纵骨Deck longitudinal26 甲板纵桁Deck girder27 舱口围板Hatch coaming28 强横梁Strong beam29 强肋骨Web frame30 货仓支柱Hold pillar31 甲板间支柱Between deck pillar32 舷墙板Bulwark plate33 舷墙扶手Hand rail34 舷墙撑材Bulwark branchet35 水平防挠材Horizontal stiffener36 舭龙骨Bilge keel37 中肘板Docking bracket38 内底边板肘板Bracket to margin plate39 水密肋板Watertight floor40 水密肋板肘板Bracket to watertight floor41 垂直扶强材Vertical stiffener42 支柱Strut43 扇形孔,锯齿孔Scallop or Serration44 减轻孔Lightening hole45 内底边板Margin plate46 人孔Manhole47 水密舱壁Watertight bulkhead48 舱壁扶强材Bulkhead stiffener49 覆板Doubling第十课艏部舣装1.起锚机Windlass2.锚链止动器Chain cable compressor3.锚链筒Hawse pipe 4.锚链Anchor chain 5.双柱带缆桩Ballard6.导缆钳Fair-lead7.导缆孔Mooring pipe 8.甲板端导缆滚轮Deck end roller 9.钢索导轮Wire reel10 喇叭形通风筒Cow head ventilator11 吊货杆Derrick boom12 吊杆支托架Boom support13 通风测深管Air and sounding pipe14 旗杆Flag staff15 吊锚杆Anchor davit16 无杆锚Stockless anchor17 锚卸扣Anchor shackle18 锚柄Anchor shank , Anchor shall19 锚冠Anchor crown20 锚臂Anchor arm21 锚掌Anchor palm22 锚爪Anchor fluke23 停泊灯柱,锚灯柱Anchor light davit24 栅栏栏杆Open rail25 栏杆扶手Hand rail stanchion26 扶手Hand rail27 锚穴Anchor recess28 首导缆钳Bow chock29 锚链筒喇叭口Bell-mouth of hawse pipe30 锚链筒甲板法兰Deck flange of hawse pipe31 有杆锚Stock anchor32 燕尾锚33 锚杆Anchor stock34 系船浮筒35 刹车带Brake band36 主齿轮Main gear wheel37 链轮Gypsy wheel, star wheel38 制动器,刹车闸Brake39 带缆卷筒Warping drum40 汽缸Cylinder41 离合器控制杆Clutch lever第十一课房间内部舣装1.办公桌Desk2.转椅Revolving chair 3.书柜Book case 4.小橱End lock 5.茶几Table6.角形沙发Sofa7.扶手软椅Arm chair 8.方舷窗Square window 9.台灯Desk light10 电话Telephone11 舷窗帘Curtain12 窗帘盒Curtain box13 时钟Clock14 舱顶灯Ceiling light15 扩散器Diffuser16 床Bed17 床头柜Bed side locker18 五屉柜Chest of drawer19 安乐椅Easy chair20 衣柜Wardrobe21 救生衣柜Life jacket locker22 镜子Mirror23 镜灯Mirror lamp24 床头灯Bed lamp25 衣帽挂钩Hat & coat hook26 梳妆柜Toilet locker27 洗脸盆Wash basin28舷窗Side scuttle29 书架Book rack30 防溅板Splash board31 水瓶架Bottle holder32 立柜Locker33 球形导向送风头Punkah louver34 餐桌Mess table35 椅子Mess chair36 带泄水槽的餐具柜Dresser with sink37 服务台Serving table38 食品柜Food locker39 餐具搁架Plate rack40 开水炉Water boiler41 水冷却器Water cooler42 电视机Television43 娱乐品小柜Game locker44 记事板Notice board45 合页Hinge46 锁孔板Escutcheon47 把手Handle48 橡皮密封圈Rubber seating ring49 风暴盖Dead light50 绞链Hinge51 舷窗Side light52 窗框Frame53 蝶形夹扣Butterfly clip54 舷窗Port or Scuttle55 玻璃Glass cover56 活动窗框Side light frame57 固定窗框Port frame58 滴水盒Saveall第十二课楼桥,驾驶室设备1. 机舱传令钟Engine telegraph2. 自动操舵仪Gyro pilot telemeter3. 雷达显示器Radar indicator4. 磁罗经Magnetic compass5. 舵轮Steering wheel6. 通航行桥楼的传声筒V oice tube to flying bridge7. 旋转了望窗Clever view screen8. 号钟Signal bell9. 液压遥控操舵器Transmitter, Telemeter10 船长Captain11 驾驶员Officer12 舵工Quarter master13 计程仪指示器Indicator of log14 雷达扫描装置Scanner of radar15 无线电测向仪16 汽笛拉线Wire of whistle17 扶手Hand rail18 导风板Wind screen19 六分仪Sextant20 起重柱Derrick post21 雷达Radar22 信号发送接收机Signal transmitter-receiver23 喇叭口Horn24 发射器Reflector25 波导管Wave guide26 扫描器传动装置Scanner drive assemble27.游标Index arm28.水平镜Horizontal glass 29.色屏Shades30.动镜Index mirror 31.手柄Handle32.望远镜Telescope33.弧形板Arc34.色屏Shades35.微调螺钉Tangent screw36. 测微计Micrometer37. 信号匹配显示器Signal matching indicator38. 舵轮Steering wheel39. 自动舵操舵台Gyro-pilot steering stand40. 雷达显示器Radar indicator41 楼桥集中操纵台Bridge console stand42. 投影磁罗经Projector compass43. 连通上桥楼的传话筒V oice tube to flying bridge44. 旋转视窗Clear view screen45. 信号钟Signal bell46. 电话Telephone47.电罗经Gyro-compass48.记事板Blackboard49. 舷侧出入口Outside doorway50. 双筒望远镜Binoculars51. 侧推器操纵手柄Side thruster lever52. 可调螺距螺旋桨调节手柄CPP lever53. 球形导向送风头Paunch louver54. 室内灯Room light55. 仪表板(发动机用)Gauge board(engine)56. 仪表板(航海用)Gauge board(navigation)第十三课救生器材1.救生筏放置处Stowage position 2.充气救生筏容器Survival pack 3.绳梯Jumping ladder 4.浮锚Sea anchor 5.蓬架Arch6.浮体Buoyancy tube 7.救生索Life line8.天棚Tent9.灯Light10 自动发烟式烟幕筒11 自燃灯Autolight lamp12 救生索Life line13 系绳栓及绳Toggle and line14 哨子Whistle15 充气阀Inflation valve16 气胀式救生筏Inflatable life-raft17 带格栅救生浮具Carley life float18 充气式救生衣Inflatable life jacket19 救生圈Life-buoy20 手持烟火信号Hand fire signal21 救生服Immersion suit22 救助艇Rescue boat23 耐火救生艇Fire-resistant lifeboat24 全封闭救生艇Totally enclosed lifeboat25 救生设备Life-saving appliance26 救生艇Lifeboat27 开敞式救生艇Open lifeboat28 部分封闭救生艇Partially enclosed lifeboat第十四课工人常用会话1.我是电工车间的工人。
ARM7跟ARM9的区别跟ARM体系结构新

ARM7与ARM9的区别及ARM体系结构一、 ARM7与ARM9的区别新一代的ARM9处理器,通过全新的设计,采用了更多的晶体管,能够达到两倍以上于ARM7处理器的处理能力。
这种处理能力的提高是通过增加时钟频率和减少指令执行周期实现的。
1 时钟频率的提高ARM7处理器采用3级流水线,而ARM9采用5级流水线。
增加的流水线设计提高了时钟频率和并行处理能力。
5级流水线能够将每一个指令处理分配到5个时钟周期内,在每一个时钟周期内同时有5个指令在执行。
在同样的加工工艺下,ARM9TDMI处理器的时钟频率是ARM7TDMI的1.8~2.2倍。
2 指令周期的改进指令周期的改进对于处理器性能的提高有很大的帮助。
性能提高的幅度依赖于代码执行时指令的重叠,这实际上是程序本身的问题。
对于采用最高级的语言,一般来说,性能的提高在30%左右。
2.1 loads 指令矛n stores指令指令周期数的改进最明显的是loads指令和stores指令。
从ARM7到ARM9这两条指令的执行时间减少了30%。
指令周期的减少是由于ARM7和ARM9两种处理器内的两个基本的微处理结构不同所造成的。
(1)ARM9有独立的指令和数据存储器接口,允许处理器同时进行取指和读写数据。
这叫作改进型哈佛结构。
而ARM7只有数据存储器接口,它同时用来取指令和数据访问。
(2)5级流水线引入了独立的存储器和写回流水线,分别用来访问存储器和将结果写回寄存器。
以上两点实现了一个周期完成loads指令和stores指令。
2.2 互锁(interlocks)技术当指令需要的数据因为以前的指令没有执行完而没有准备好就会产生管道互锁。
当管道互锁发生时,硬件会停止这个指令的执行,直到数据准备好为止。
虽然这种技术会增加代码执行时间,但是为初期的设计者提供了巨大的方便。
编译器以及汇编程序员可以通过重新设计代码的顺序或者其他方法来减少管道互锁的数量。
2.3 分枝指令ARM9和ARM7的分枝指令周期是相同的。
ARM开发环境搭建 eclipse for arm实验报告
实验报告实验题目ARM开发环境搭建 eclipse for arm姓名:学号:课程名称:所在学院:专业班级:任课教师:一、实验目的与要求:1、掌握 ARM 汇编语言的基本使用和一些伪指令的使用;2、熟悉 eclipse 开发工具建立汇编工程和仿真;四、实验过程、步骤及内容1、win7环境安装FS_JTAG工具(1)安装GCC 编译工具双击安装“华清远见-CORTEXA9 资料\工具软件\Windows\FS-JTAG\Yagarto 工具包”目录下的文件:yagarto-bu-2.21_gcc-4.6.2-c-c++_nl-1.190_gdb-7.3.1_eabi_20111119.exe(2)装Yagarto 工具包双击安装“华清远见-CORTEXA9 资料\工具软件\Windows\FS-JTAG\Yagarto 工具包”目录下的文件:yagarto-tools-20100703-setup.exe(3)安装FS_JTAG调试软件双击“x包”下的setup.exe安装FS_JTAG工具(4)安装FS_JTAG驱动将FS_JTAG通过USB线与PC连接,右键点击“我的电脑”选择“管理”,在左侧栏里选择“设备管理”选择“其他设备”右键点击选择“更新驱动”选择“浏览计算机以查询驱动程序软件(R)”;点击浏览选择“FS-JTAG 调试工具(安装包)\DRIVER”目录主要“包括子文件夹”必须选择,点击“下一步”。
安装过程出现上图提示,点击“始终安装此驱动程序软件(I)“继续安装点击“关闭“完成安装注意:此安装过程需要进行 3 次,直到设备管理器中没有叹号标记或未知设备。
这是设备管理器中会出现如下选项:如果下面选项没有全部出现,右键点击有黄色叹号的选项更新驱动,过程同上。
(5)安装JRE双击安装“华清远见-CORTEXA9 资料\ 工具软件\Windows\FS-JTAG\JRE ”目录下的文件: jre-6u7-windows-i586-p-s.exe2、连接硬件平台按下图所示,连接仿真器、USB 转串口线、电源。
剑桥一级教学大纲

guitar, hit, hobby,
hockey, jump, kick, kite,
listen to, paint(ing), photo, piano, picture, play (with), radio, read, ride, run, sing, song,
story, sport, table tennis, television/TV,
alphabet, answer, ask,
school?
board, book, bookcase, --I study English at
class, classroom, close,
school.
color, computer,
correct, cross,
cupboard, desk, door,
watch, wear, black,
--I like… 2. --Do you like black?
-- Yes, I do./ No, I don’t
3. --What color is it? --It’s …
blue, brown, color,
green, grey, orange,
pink, purple, red, white,
第二课时
4.I am like a small ball.
课次
课时
必会词汇
必会句型
第九次课
第一课时
主题词汇:方位&时间 behind, between, here, in, in front of , next to, on, park, shop, store, there, under. afternoon,
形体教学大纲

形体训练课教案
教学目的:用形体训练来改变学生的自然体态,再加上舞蹈组合,以提高形体的美感,培养良好的气质,陶冶美的情操,提高审美品位。
教学重难点:如何掌握正确的形体训练方法。
教学内容:
形体训练是构成动作语汇最基本的单位,是通向艺术教育的必经之路。
形体训练的主要特征是以人体生理科学原理、美学原理为指导,以身体训练为主要手段,以发展专项素质为基础,以塑造健康优美的形象为核心,以提高形体的控制力与表现力为重点,以培养学生的良好个性与高雅气质为目的。
形体训练是对学生进行艺术美育教育的过程,是获得形体美和心理美以及美的表现的主要途径。
《嵌入式系统基础》课程教学大纲
嵌入式系统基础课程教学大纲(EmbeddedMicroprocessorSystem)学时数:32其中:实验学时:0课外学时:0学分数:2适用专业:计算机科学与技术一、课程的性质、目的和任务本课程是计算机科学与技术专业本科生的一门专业选修课程。
通过本课程的学习,使学生掌握嵌入式系统的基础知识,熟悉典型的嵌入式微处理器及嵌入式操作系统,掌握嵌入式系统的一般设计方法与开发过程,具备初步的嵌入式系统的软硬件设计开发能力,为嵌入式系统的实际应用打下基础。
二、课程教学的基本要求(一)掌握嵌入式系统的基本概念、基本组成及发展、嵌入式处理器及嵌入式操作系统分类(二)掌握ARM嵌入式微处理器体系结构、ARM指令系统及ARM汇编语言(H)掌握嵌入式1inUX 操作系统内核结构及文件系统(四)掌握嵌入式系统的一般设计流程、典型开发环境及开发工具(五)掌握基于ARM嵌入式微处理器的典型接口设计(六)初步掌握基于嵌入式1inUX操作系统的软件设计三、课程的教学内容、重点和难点第一章嵌入式系统基础知识一、嵌入式系统简介二、嵌入式处理器第二章嵌入式系统一般设计方法一、嵌入式系统的层次结构二、嵌入式系统的设计流程第三章ARM处理器体系结构及指令系统一、ARM微处理器的体系结构二、指令系统三、基于ARM体系的汇编语言程序设计第四章基于ARM处理器的硬件平台设计一、基于微处理器的嵌入式系统的硬件设计二、存储系统的分析与设计三、通用I/O接口的设计第五章嵌入式1inux操作系统一、1i1IUX及其应用二、嵌入式1inux内核三、嵌入式1inUX文件系统第六章嵌入式1inux系统的Boot1oader设计一、Boot1oader的基本概念二、Boot1oader的具体实现重点:Boot1oader的基本概念难点:BOOt1Oader的具体实现第七章嵌入式1inux程序设计基础一、嵌入式1inUX开发基础二、1inUX的常用工具三、嵌入式1inUX操作系统的开发工具四、交叉开发环境重点:嵌入式1inUX操作系统的开发工具、难点:交叉开发环境第八章嵌入式1inux系统的驱动开发一、1inUX下的设备驱动程序简介二、设备驱动程序的开发过程三、典型设备驱动程序设计分析第九章嵌入式网络程序设计一、嵌入式以太网基础知识二、以太网接口设计三、1in1IX网络编程实现重点:以太网接口设计、1inUX网络编程实现难点:1inUX网络编程实现第十章嵌入式1inux图形用户界面编程一、1inux图形开发基础二、嵌入式1inIIX图形用户界面简介四、课程各教学环节要求(一)作业根据课程学习需要,安排适当课外作业。
冀教版三年级英语单词

V ocabulary上册Aarm 胳膊[ɑ:m] (17)Bblue [blu:]蓝色(的)(11)body [bɔdi ]身体(17)book 书(3)boy 男孩(2)brother[brʌðə]哥哥;弟弟(28)Cchair[tʃɛə]椅子(3)cold[kəuld]的(18)cry(ing) 哭(25)Ddaughter 女儿(25)desk 书桌(3)Eear 耳朵(19)eight 八(14)elbow 肘(20)eye 眼(19)Ffamily 家庭(25)father 父亲(25)finger 手指(20)five 五(5)foot 脚(复数为feet)(17)four 四(5)Ggirl 女孩(2)Hhand 手(17)happy 高兴的(17)head 头(17)hello 喂(表示问候)(1)hi (=hello)喂(1)hot 热的(18)Iin 在……之内(13)Kknee 膝盖(20)Llaugh(ing) 笑(25)leg 腿(17)Mmarker 水彩笔(7)mother 母亲(25)mouth 嘴(19)Nname 名字(1)nine 九(14)nose 鼻子(19)Oold 老的(28)on 在……上面(13)one 一(5)orange 橙子;橘色(的)(11)Ppen 钢笔(7)pencil 铅笔(7)play(ing) 玩(31)Rred 红色(的)(11)Ssad 悲伤的(17)school 学校(4)seven 七(14)short 短的;矮的(26)shoulder 肩膀(20)sick 有病的(23)sing(ing) 唱歌(25)sister 姐姐;妹妹(28)six 六(14)son 儿子(25)stomach 胃;肚子(20)Ttalk(ing)说话;交谈(25)tall 高的(26)teacher 教师(2)ten 十(14)three 三(5)toe 脚趾(复数为toes)(20)two 二(5)Uunder 在……下面(13)Wwork(ing) 工作(31)Yyellow 黄色(的)(11)young 年轻的(28)下册Aabove 在……上方(28)afternoon 下午(4)apple 苹果(9)Bball 球(30)banana 香蕉(9)bed 床(25)below 在……下方(28)beside 在……旁边(28)big 大的(21)blouse 女衬衫(17)breakfast 早餐(5)Cchicken 鸡(2)coat 外套;大衣(19)Ddoll 洋娃娃(30)donut 面包圈(12)dress 连衣裙(20)dresser 梳妆台(25)drink 喝(1)dumplings 饺子(3)Eeat 吃(1)eighteen 十八(10)eleven 十一(2)evening 傍晚;晚上(4)Ffifteen 十五(2)fish 鱼(2)fourteen 十四(2)French fries 炸薯条(11)Friday 星期五(22)fruit 水果(4)Ggrapes 葡萄(9)Hhamburger 汉堡包(11)hat 帽子(19)hot dog 热狗(12)hungry 饥饿的(1)Jjuice 果汁(6)Kkite 风筝(30)Llunch 午餐(5)Mmeat 肉(2)melon 瓜(9)milk 牛奶(7)Monday 星期一(22)morning 早上;上午(4)Nnew 新的(18)nineteen 十九(10)noodles 面条(3)Oold 旧的;老的(18)Ppants 裤子(17)pizza 比萨饼(11)pop 汽水(11)Rrice 米;米饭(3)SSaturday 星期六(22)seventeen 十七(10)shirt (男士)衬衫;衬衣(17)shoes 鞋(20)sixteen 十六(10)skirt 裙子(17)small 小的(21)socks 短袜(20)soup 汤(3)strawberry 草莓(复数为strawberries) (9)Sunday 星期天(22)supper 晚餐;晚饭(5)sweater 毛衣(17)T tea 茶(9)telephone 电话(27)thirsty 渴的(1)thirteen 十三(2)thirty 三十(28)Thursday 星期四(22)Tuesday 星期二(22)TV 电视;电视机(27)twelve 十二(2)twenty 二十(10)twenty-one 二十一(28)Vvegetables 蔬菜(4)Wwater 水(9)Wednesday 星期三(22)备注:最后括号里写的是第几课,1~7课属于第一单元;9~15课属于第二单元;17~23课属于第三单元;25~27课属于第四单元。
北邮 嵌入式 实验报告
北邮嵌入式实验报告北邮嵌入式实验报告一、引言嵌入式系统是将计算机技术与其他工程领域相结合的一种综合应用技术,广泛应用于各个领域。
本实验旨在通过对北邮嵌入式系统的学习与实践,深入了解嵌入式系统的原理和应用。
二、实验背景北邮嵌入式实验是计算机科学与技术专业的一门重要实践课程。
通过该实验,学生可以掌握嵌入式系统的基本原理、设计方法和调试技巧,提高对计算机硬件和软件的综合应用能力。
三、实验内容1. 硬件平台本实验使用的硬件平台为北邮嵌入式系统开发板,该开发板集成了ARM Cortex-M3内核的处理器,具有丰富的外设接口和扩展能力。
2. 软件开发环境本实验使用的软件开发环境包括Keil MDK-ARM集成开发环境和ST-Link调试工具。
Keil MDK-ARM提供了一套完整的软件开发工具链,包括编译器、汇编器、链接器和调试器等,方便学生进行嵌入式软件的开发和调试工作。
3. 实验任务本实验主要包括以下几个任务:(1) 学习嵌入式系统的基本原理和架构,了解处理器的工作原理和寄存器的使用方法。
(2) 学习嵌入式软件开发的基本流程,包括编译、烧写和调试。
(3) 编写简单的嵌入式应用程序,实现对外设的控制和数据处理功能。
(4) 调试和测试嵌入式应用程序,验证程序的正确性和稳定性。
四、实验过程1. 学习嵌入式系统的基本原理和架构在实验开始前,我们首先学习了嵌入式系统的基本原理和架构。
了解了处理器的工作原理,包括指令执行过程、寄存器的使用方法等。
同时,我们还了解了嵌入式系统的外设接口和扩展能力,为后续的实验任务做好准备。
2. 学习嵌入式软件开发的基本流程在掌握了嵌入式系统的基本原理后,我们开始学习嵌入式软件开发的基本流程。
首先,我们安装了Keil MDK-ARM集成开发环境,并配置了相应的编译器和调试器。
然后,我们学习了嵌入式软件的编译、烧写和调试方法,掌握了如何将编写的程序烧写到开发板上,并通过调试工具进行程序的调试和测试。
第七课:肩关节镜下肩袖修补术
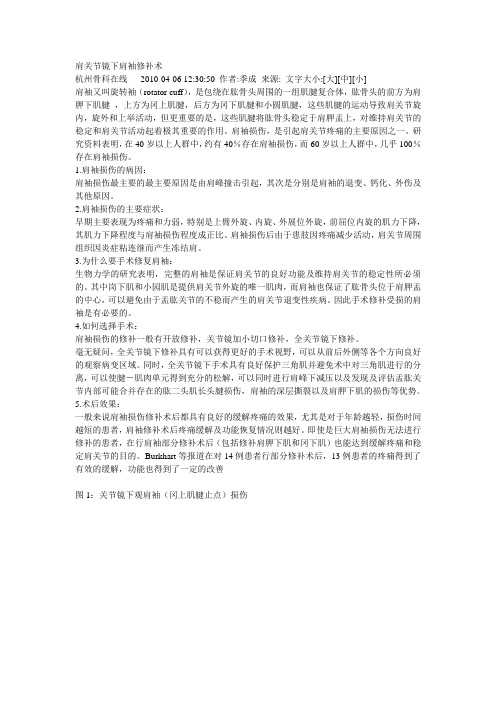
肩关节镜下肩袖修补术杭州骨科在线2010-04-06 12:30:50 作者:季成来源: 文字大小:[大][中][小]肩袖又叫旋转袖(rotator cuff),是包绕在肱骨头周围的一组肌腱复合体,肱骨头的前方为肩胛下肌腱,上方为冈上肌腱,后方为冈下肌腱和小圆肌腱,这些肌腱的运动导致肩关节旋内,旋外和上举活动,但更重要的是,这些肌腱将肱骨头稳定于肩胛盂上,对维持肩关节的稳定和肩关节活动起着极其重要的作用。
肩袖损伤,是引起肩关节疼痛的主要原因之一。
研究资料表明,在40岁以上人群中,约有40%存在肩袖损伤,而60岁以上人群中,几乎100%存在肩袖损伤。
1.肩袖损伤的病因:肩袖损伤最主要的最主要原因是由肩峰撞击引起,其次是分别是肩袖的退变、钙化、外伤及其他原因。
2.肩袖损伤的主要症状:早期主要表现为疼痛和力弱,特别是上臂外旋、内旋、外展位外旋,前屈位内旋的肌力下降,其肌力下降程度与肩袖损伤程度成正比。
肩袖损伤后由于患肢因疼痛减少活动,肩关节周围组织因炎症粘连继而产生冻结肩。
3.为什么要手术修复肩袖:生物力学的研究表明,完整的肩袖是保证肩关节的良好功能及维持肩关节的稳定性所必须的。
其中岗下肌和小园肌是提供肩关节外旋的唯一肌肉,而肩袖也保证了肱骨头位于肩胛盂的中心,可以避免由于盂肱关节的不稳而产生的肩关节退变性疾病。
因此手术修补受损的肩袖是有必要的。
4.如何选择手术:肩袖损伤的修补一般有开放修补,关节镜加小切口修补,全关节镜下修补。
毫无疑问,全关节镜下修补具有可以获得更好的手术视野,可以从前后外侧等各个方向良好的观察病变区域。
同时,全关节镜下手术具有良好保护三角肌并避免术中对三角肌进行的分离,可以使腱-肌肉单元得到充分的松解,可以同时进行肩峰下减压以及发现及评估盂肱关节内部可能合并存在的肱二头肌长头腱损伤,肩袖的深层撕裂以及肩胛下肌的损伤等优势。
5.术后效果:一般来说肩袖损伤修补术后都具有良好的缓解疼痛的效果,尤其是对于年龄越轻,损伤时间越短的患者,肩袖修补术后疼痛缓解及功能恢复情况则越好。
微处理器系统结构与嵌入式系统设计教学大纲教案
《微处理器系统结构与嵌入式系统设计》教学大纲教案课程英文名称:Microcomputer System Theory and Embedded System Design课程代码:E0130340 学时数:64 学分数:4课程类型:学科基础课程适用学科专业:工学,仪器仪表类、电气类、电子信息类、自动化类、计算机类各专业以及机械类、测绘类、航空航天类、能源动力类、交通运输类、生物医疗工程类各相关专业先修课程:数字逻辑设计及应用,高级语言程序设计,软件技术基础执笔者:编写日期:审核人:一、课程简介本课程是工学电子电气信息工程及相关专业的学科基础课程,与实践类课程《微处理器系统与嵌入式系统综合设计》(课程代码:K0175010)互为配套课程。
本课程在阐述通用微处理器系统的架构、组成及工作原理的基础上,介绍了基于ARM CPU的、现代嵌入式微系统的设计与实现技术。
课程全面涵盖了微处理器、存储器、总线及接口等计算机子系统,重点体现了嵌入式系统/片上系统中硬件电路和软件程序的协同工作原理与设计方法,具体讲述了微处理器中数据通路、控制部件及指令的实现技术、分层存储器设计技术、输入/输出接口控制技术,以及ARM微处理器程序设计技术、异常处理技术,嵌入式系统引导程序设计、接口驱动程序设计及操作系统移植等内容。
This course is a basic subject-centered course in electrical and electronic information engineering and other related specialties. It will be helpful to understand the knowledge of the co-requisite experimental course K0175010 - Microprocessor and Embedded System Laboratory.The architecture, organization and operation principles of general-purpose microprocessor systems will be elaborated, as well as the design and implementation technology for current embedded microsystems based on ARM CPU. The subsystems in a computer, including microprocessor, memories, buses, input/output interfaces and others, will be completely involved. The primary goal of this course is to studying the cooperated relationship between the hardware and software in an embedded system or a System-on-Chip, by discussing in detail on the design method for data path and the controller inside CPU, the implementation technology for hierarchy storage system, the control mode for peripherals, and the program skill for APPs, exception handlers, boot codes, drivers and operating system transplantation, and so on.二、课程目标本课程旨在培养学生深入理解微处理器芯片与嵌入式系统的架构、组成及工作原理,熟练掌握现代嵌入式微系统中硬件电路和软件程序的基本分析、设计与实现方法。
新概念英语一第七课

CompetitionEngland1.a/an + 可数名词2.This is 介绍3. 它是什么牌子?4. 音标认读[a:] [ә:] [i:] [ɔ:] [u:]二. Translate the following into English:布莱克先生:早上好。
学生:早上好,布莱克先生。
布莱克先生:这位是索菲娅.杜邦小姐。
索菲娅是个新学生。
她是法国人。
布莱克先生:索菲娅,这位是汉斯。
他是德国人。
汉斯:很高兴见到你。
布莱克先生:这位是直子。
她是日本人。
直子:很高兴见到你。
布莱克先生:这位是昌宇。
他是韩国人。
昌宇:很高兴见到你。
布莱克先生:这位是鲁明。
他是中国人。
鲁明:很高兴见到你。
布莱克先生:这位是晓惠。
她也是中国人。
小惠:见到你很高兴。
Lesson 4元音音标[ei] [ai] [ɔi] [au]练习[ei] 发这个音的字母和字母组合a ai aya: cake make name game snake gate lazy ai: rain train waitay:day May play taday wa y•[ai] 发这个音的字母和字母组合i y ie uy •i: kite bike nice tiger write knife •y: by cry fly my sky try why •ie:tie pie•uy:buy•[ɔi] 发这个音的字母和字母组合oi oy •oi: oil boil coin•oy: boy toy•[au] 发这个音的字母和字母组合ou ow •ou: house mouse mouth trousers •ow: flower cow how now down•音标[ei] [ai] [ɔi] [au]练习选出下列没有发相同发音的词•( ) 1. cake egg rain May •( ) 2. kite cry broom fly •( ) 3. boy joy cat noise •( ) 4. blouse sun cow house •( ) 5. tower flower mouth armLesson 7Are you a teacher?词汇辨析New Words 新单词1 I pron.我2 am v.be动词3 are v.be动词4 name n.名字5 what a.& pron.什么6 nationality n.国籍7 job n.工作8 keyboard n.电脑键盘9 operator n.操作人员10 engineer n.工程师New Words 新单词1 policeman n.警察2 policewoman n.女警察3 taxi driver 出租汽车司机4 air hostess 空中小姐5 postman n.邮递员6 nurse n.护士7 mechanic n.机械师8 hairdresser n.理发师9 housewife n.家庭妇女10 milkman n.送牛奶的人Nice to meet you ! Myname is Sophie.见到你很高兴!Are you French ?Yes , I .amAre y ou French ,too ?notNo, I am .What nationality you ?areamI Italian .Are No ,I am .you a teacher??notyour job ? What ’sanI’m engineer.What’syour job ?I’m a keyboard operator .doctor teacher studentkeyboardoperator1.What is Robert's job?2.What is Sophie's job?3.What nationalityis Sophie?4.What nationalityis Robert?Answer1.What is Robert's job?2.What is Sophie's job?3.What nationalityis Sophie?4.What nationalityis Robert?Language points: 1.人称代词主格宾格I 我you 你,你们she 她he 他it 它they 他们we 我们2. Be动词用法3 .My name’s Robert. 我的名字叫罗伯特。
ARM开发调试教程(转贴)

ARM开发调试教程(转贴)标签:无标签ARM开发调试教程(转贴)说明:本文是我学习ARM开发以来的一些经验总结,以自己设计的S3C44B0X板为例,给出我调试开发ARM开发板的一些最基础知识。
我只是在自己的开发板调试过并且经验有限,有些知识只能做为参考,不一定准确,就算给大家一个“例程”吧,如果大家有不同意见,希望多多指正!硬件篇(一)开发板的整体架构我设计的开发板是在三星44B0 demo板的基础上,参考网络上相关的资料,加入我的思想开发的。
以下是该开发板的整体架构:(二)开发板的焊接贴片式元器件的拆卸、焊接宜选用200~280℃调温式尖头烙铁。
贴片式电阻器、电容器的基片大多采用陶瓷材料制作,这种材料受碰撞易破裂,因此在拆卸、焊接时应掌握控温、预热、轻触等技巧。
控温是指焊接温度应控制在200~250℃左右。
预热指将待焊接的元件先放在100℃左右的环境里预热1~2分钟,防止元件突然受热膨胀损坏。
轻触是指操作时烙铁头应先对印制板的焊点或导带加热,尽量不要碰到元件。
另外还要控制每次焊接时间在3秒钟左右,焊接完毕后让电路板在常温下自然冷却。
以上方法和技巧同样适用于贴片式晶体二、三极管的焊接。
贴片式集成电路的引脚数量多、间距窄、硬度小,如果焊接温度不当,极易造成引脚焊锡短路、虚焊或印制线路铜箔脱离印制板等故障。
拆卸贴片式集成电路时,可将调温烙铁温度调至260℃左右,用烙铁头配合吸锡器将集成电路引脚焊锡全部吸除后,用尖嘴镊子轻轻插入集成电路底部,一边用烙铁加热,一边用镊子逐个轻轻提起集成电路引脚,使集成电路引脚逐渐与印制板脱离。
用镊子提起集成电路时一定要随烙铁加热的部位同步进行,防止操之过急将线路板损坏。
换入新集成电路前要将原集成电路留下的焊锡全部清除,保证焊盘的平整清洁。
然后将待焊集成电路引脚用细砂纸打磨清洁,均匀搪锡,再将待焊集成电路脚位对准印制板相应焊点,焊接时用手轻压在集成电路表面,防止集成电路移动,另一只手操作电烙铁蘸适量焊锡将集成电路四角的引脚与线路板焊接固定后,再次检查确认集成电路型号与方向,正确后正式焊接,将烙铁温度调节在250℃左右,一只手持烙铁给集成电路引脚加热,另一只手将焊锡丝送往加热引脚焊接,直至全部引脚加热焊接完毕,最后仔细检查和排除引脚短路和虚焊,待焊点自然冷却后,用毛刷蘸无水酒精再次清洁线路板和焊点,防止遗留焊渣。
arm7(lpc2138)实验例程

微机原理实验报告实验名称:步进电机控制院系:物理与机电工程学院专业班级:0 8电子信息工程学号:**********学生姓名:***指导教师:完成时间:2011年5月5日报告成绩:一、实验目的1、掌握四相五线步进电机的工作原理2、以单四拍的方式用LPC2138与L297、L298控制步进电机二、实验原理1、用软件的方式通过对P1_21与P1_22的控制,并通过L297、L298驱动5V直流步进电机,原理图如下:2、同时用按键产生外部中断控制电机的转速与转向。
转速的控制主要是脉冲的频率,为了控制的简单,可以直接利用软件延时的方法实现。
3、程序再增加上位机控制步进电机指令4、程序流程图三、实验设备微机、EasyARM2131-LYXY V1.14学习开发板四、实验效果上电时步进电机按初始化的速度转动,按下4个按键分别执行增、减速;正、反转,同时上位机显示控制指令。
五、实验总结1、此次实验由于不是精细控制步进电机的步进量,所以只用简单的延时程序就可以控制速度,但要注意延时变量的取值避免步进电机出现失步现象。
2、写中断服务程序时记得清除相应的中断标志,且一定不要忘了VICVectAddr =0x00;即通知VIC中断处理结束。
一开始实验时由于少了此句,程序一直不正常。
七、程序清单#include "config.h"int DelayTime=60; //延时参数typedef struct UartMode{uint8 datab; //字长度,5/6/7/8可选uint8 stopb; //停止位,1/2可选uint8 parity; //奇偶校验位,0:无校验;1:奇检验;2:偶检验}UARTMODE;uint8 rcv_buf; //UART0数据接收缓冲区uint8 rcv_new; //接收数据标志void delay(int dly){int i,j;for(i=0; i<dly; i++)for(j=0; j<1200; j++);}//串口0数据发送函数void UART0_SendByte(uint8 dat){U0THR=dat;while((U0LSR&0x20)==0); //等待数据发送完毕}//串口0初始化函数uint8 UART0_Init(uint32 baud, UARTMODE set){uint32 bak;//参数过滤if((baud==0)||(baud>115200))return(0);if((set.datab<5)||(set.datab>8))return(0);if((set.stopb==0)||(set.stopb>2))return(0);if(set.parity>4)return(0);//设置串口的波特率U0LCR=0x80; //DLAB=1bak=(Fpclk>>4)/baud;U0DLM=bak>>8;U0DLL=bak&0xff;//设置串口模式bak=set.datab-5; //设置字长if(set.stopb==2)bak|=0x04; //判断是否为2位停止位if(set.parity!=0){set.parity=set.parity-1;bak|=0x08;}bak|=set.parity<<4; //设置奇偶校验U0LCR=bak;return(1);}//中断初始化函数void Int_Init(void){EXTMODE=0x00; //设置外部中断为电平触发IRQEnable(); //使能IRQ中断VICIntSelect=0x00000000; //设置所有分配为IRQ中断VICVectCntl4=0x20|0x0e; //分配外部中断4到向量中断0VICVectCntl1=0x20|0x0f; //分配外部中断1到向量中断0VICVectCntl2=0x20|0x10; //分配外部中断2到向量中断0VICVectCntl3=0x20|0x11; //分配外部中断3到向量中断0VICVectCntl0=0x20|0x06; //分配Uart0中断到向量中断0//设置中断服务程序地址VICVectAddr4=(uint32)IRQ_Eint0;VICVectAddr1=(uint32)IRQ_Eint1;VICVectAddr2=(uint32)IRQ_Eint2;VICVectAddr3=(uint32)IRQ_Eint3;VICVectAddr0=(uint32)IRQ_UART0;EXTINT=0x0f; //清除所有外部中断标志VICIntEnable=(1<<0x0e)|(1<<0x0f)|(1<<0x10)|(1<<0x11)|(1<<0x06);//使能所用到的中断}//工作模式设置函数void SetWorkMode(char WorkMode){//WorkMode:控制信号// '+':加速 '-':减速'<':逆时针'>':顺时针switch(WorkMode){case '+':if(DelayTime>20)DelayTime=DelayTime-20; //减少延时,即加速break;case '-':if(DelayTime<100)DelayTime=DelayTime+20; //增加延时,即减速break;case '<':IO0CLR=0x01<<21; //设置的步进电机的运转方向为逆时针break;case '>':IO0SET=0x01<<21; //设置的步进电机的运转方向为顺时针break;default :break;}}//外部中断0服务程序void __irq IRQ_Eint0(void){IO0CLR=0x01<<21; //设置的步进电机的运转方向为逆时针while((EXTINT&0x01)!=0){EXTINT=0x01; //清除中断标志}VICVectAddr=0;}//外部中断2服务程序void __irq IRQ_Eint2(void){if(DelayTime>20)DelayTime=DelayTime-5; //减少延时,即加速while((EXTINT&0x04)!=0){EXTINT=0x04; //清除中断标志}VICVectAddr=0;}//外部中断1服务程序void __irq IRQ_Eint1(void){IO0SET=0x01<<21; //设置的步进电机的运转方向为顺时针while((EXTINT&0x02)!=0){EXTINT=0x02; //清除中断标志}VICVectAddr=0;}//外部中断3服务程序void __irq IRQ_Eint3(void){if(DelayTime<100)DelayTime=DelayTime+5; //增加延时,即减速while((EXTINT&0x08)!=0){EXTINT=0x08; //清除中断标志}VICVectAddr=0;}//串口0接收中断服务程序void __irq IRQ_UART0(void){if((U0IIR&0x0f)==0x04)rcv_new=1; //设置接收到新的数据标志rcv_buf=U0RBR; //读取FIFO的数据,并清除中断VICVectAddr=0;}int main (void){UARTMODE set;set.datab=8; //设置字长度为8位set.stopb=1; //设置停止位为1位set.parity=0; //设置检验方式为无校验rcv_new=0; //接收数据标志初始化PINSEL0=0x0005c0c5;PINSEL1=0x00000301;IO0DIR=0x03<<21; //设P0.21-P0.22为输出UART0_Init(9600, set); //串口初始化U0FCR=0x01; //使能FIFO,并设置触发点为1字节U0IER=0x01; //允许RBR中断,即接收中断Int_Init(); //中断初始化(外部中断、串口中断)while(1){if(rcv_new==1){rcv_new=0;SetWorkMode(rcv_buf);//根据输入控制信号改变步进电机的工作模式UART0_SendByte(rcv_buf); //把键盘输入发回虚拟终端回显}IO0SET=0x01<<22;delay(DelayTime);//DelayTime初始值设定为60IO0CLR=0x01<<22;delay(DelayTime);}return 0;}。
亲和层析法
第二节 操 作
一、基质的选择 理想的基质应满足下面的要求: 1.极低的非特异吸附性; 2.高度的亲水性。
亲和吸附剂要易与水溶液中的生命大分子物 质接近。 3.较好的理化稳定性。
当配体固化和各种因素(如pH、离子强度、 温度和变性剂等)变化时,基质很少甚至不受 影响;
4.大量的化学基团能被有效地活化,而且容易和配 体结合;
无亲和力或非特异吸附的物质则被起始缓冲液洗涤 出来,并形成了第一个层析峰;
然后,恰当地改变起始缓冲液的
pH值、
或增加离子强度、
或加入抑制剂等因子,
即可把物质S从固相载体上解离下来,并形成了第 二个层析峰(见图7-2B)。
如果样品液中存在两个以上的物质与固相载体具有亲 和力(其大小有差异)时,
抑制剂、 效应物、 酶的辅助因子、 类似底物、 抗体[包括半抗原(碱基、核苷、核苷酸、寡核苷酸)蛋白质复合物抗体]、 其他物质(如外源凝集素、polyA.polyU、染料和金属 离子)等。
优良的配体须具备两个条件:
1)与纯化的物质有较强亲和力
一般来说,
配体对大分子物质的亲和力越高(即Ki(抑制常数) 或Ka(解离常数)较小),在亲和层析中应用的价值 就越大。
•
B. 剧烈的洗脱条件(蛋白质变性剂)
• 如用盐酸胍、尿素等变性试剂配制的溶液洗脱下的 蛋白质等生命大分子物质;需要经过适当的处理方可 恢复活性。
六、亲和层析柱的再生
当洗脱结束后, 应连续用大量的洗脱液或 高浓度的盐溶液彻底洗涤柱子, 接着再 用平衡缓冲液使层析柱重新平衡。
经过这样处理的柱子可再次上样, 进行第 二次亲和层析。
样品的浓度、pH值、离子强度以及上样的速度等因 子对其影响也不可轻视。 若选择得当, 则可提高固相载体对欲分离物的亲和力。
迅饶 MB1001-ARM 安装说明书
安装说明书适用Modubs路由(Modubs Router)(一网两串:1个网口、1个RS232/485)型号:MB1001-ARM一、硬件参数二、产品图三、接线说明电源:交直流AC/DC 12~24V;网口:默认IP地址192.168.1.88;全隔离RS485接口:1个全隔离RS485接口A接正(+)B接负(-)GND(接地线)。
全隔离RS232接口:1个全隔离RS232接口Rx(2)TX(3)GND(5)。
(注:RS232与RS485为复用关系)四、安装示意图导轨式五、使用步骤⚫Modbus Router 是纯网页式配置,网关的出厂默认IP 地址是192.168.1.88,用户只需一根网线(交叉或直连都可以)和网关直连。
然后将PC 设置成和网关为同一个网段,如192.168.1.55。
在浏览器中输入IP 地址192.168.1.88,登录路由器的内置网页。
⚫登录用户名:admin 密码:admin123456,进入Modbus 路由器后台。
⚫在Modbus 路由器后台Router设置中开启启用COM口,选择TCP或UDP协议模式。
并设置所连接的COM上设备的端口号,波特率,站号等参数,要与采集设备参数一致。
⚫在上位机软件中设置连接参数,与Modbus 路由器后台Router设置中一致,之后建立Modbus TCP或UDP 协议的相应点位,通讯成功。
六、注意事项⚫Router每一个串口对应一个端口号,所以要求端口号不能重复。
⚫不同的COM口可以设定不同的波特率。
支持的波特率有300、600、1200、2400、4800、9600、19200、38400、56000、57600、115200。
七、常见问题答1:如何修改路由器的IP地址?答1:路由器出厂默认的IP地址192.168.1.88,子网掩码255.255.255.0,默认网关192.168.1.1。
用户第一次使用的时候用电脑和路由器之间用网线直连,然后把电脑IP地址改到和路由器同一个网段内(如电脑上的IP改为192.168.1.55),在ping通路由器IP地址的情况下,打开浏览器,输入路由器IP地址192.168.1.88,登录路由器的Web服务器,在“网口设置”一栏设置IP地址。
arm中断号计算
在ARM体系结构中,存在7种异常,中断是异常中的一种。
当外部事件或异常产生时,由硬件负责产生一个中断标记,CPU根据中断标记获得相应中断的中断向量号,然后由CPU 根据中断向量表的地址和中断向量号去查找相应的中断处理程序。
因此,计算ARM中断号的方法是根据中断向量表的地址和中断向量号去查找相应的中断处理程序。
具体来说,中断号等于中断向量表的地址加上中断向量号。
例如,如果中断向量表的地址为0x1000,中断号为3,则中断向量表中第3个中断处理程序的地址为0x1000+3=0x1003。
KB1教学计划

重点句型:1.Hello, I’m… 2.What’s your name? My name’s … 3.How old are you? I’m …
1。学会简短的自我介绍
2。记住Star家庭成员名字。 3。理解和使用数字1-10,
语音:/g/
1.说话时正在进行的动作提出问题和回答
2.学习练习/g/的发音,并进行更多的拼写练习
第二十五次课
Unit12 Party time!
重点录音: P72 Listen and point .
词汇:food, apple, banana, burger, ice cream, some cake, make a cake, chocolate, fish, party time,barbecue
有关复数
1.学习各种宠物的名称
2.讨论并描述和宠物有关的话题3。简单复数的运用
第十一次课
Unit5 Our pets
重点录音:P30 Listen and point 。
词汇:bird, long, short, big, small, clean, dirty, Penny penguin, pink, purple重点句型:Look at my cat. Where’s your pet?
1。学习身体各部位名称。
2。学会用have got讨论身体特征
第十三次课
Unit6 My face
重点录音:P36 Listen and point 。
词汇: hair, head, shoulders, knees, toes, body, Henry horse
重点句型:I've got purple hair。We’ve got...
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STMIA STMEA LDMDB LDMEA LDMDA LDMFA
向下生长 满 空
LDMIB LDMED
LDMIA LDMFD STMDB STMFD STMDA STMED
空
之前 增加
之后 之前
减少
之后
IA(Increment After) 操作完成后地址递增 IB(Increment Before) 地址先递增而后完成操作 DA(Decrement After) 操作完成后地址递减 DB(Decrement Before) 地址先减而后完成操作
R9'
R5 R1 R0
STMDA R9! , {R0 , R1 , R5}
STMDB R9! , { R0 , R1 , R5 }
图中表明了如何将3个寄存器存到存储 器中,以及使用自动寻址时如何修改基址 寄存器。执行指令之前的基址寄存器值是 R9,自动寻址之后的基址寄存器是R9’
举例说明:下面的两条指令是从R0指向 的位置拷贝8个字到R1指向的位置。 LDMIA R0!,{R2-R9} STMIA R1,{R2-R9} 执行指令后,R0由于“!”的引用自动 寻址8个字,其值共增加32,而R1不变 。
满堆栈(Full Stack):堆栈指针指向最后压入堆
栈的数据或者指向第一个要读出的数据。
空堆栈(Empty Stack):堆栈指针指向最后压入
堆栈的数据的上或下一个空位置或者指向第一个
要读出的数据的上或下一个空位置(根据堆栈的
生长方向而定)。
堆栈寻址
根据以上的描述说明,堆栈有四种形式,分别是由递增、递减、满栈 、空栈组成的所有组合。
常见多字节传送指令
堆栈用 空向下生长型(之前增量) 满向下生长型(之后增量) 空向上生长型(之前增量) 满向上生长型(之后增量) 满向上生长型(之前增量) 空向上生长型(之后增量) 空向下生长型(之前增量) 满向下生长型(之后增量) LDMED LDMFD LDMEA LDMFA STMFA STMEA STMFD STMED 一般数据存取 LDMIB LDMIA LDMDB LDMDA STMIB STMIA STMDB STMDA L位 1 1 1 1 0 0 0 0 P位 1 0 1 0 1 0 1 0 U位 1 1 0 0 1 1 0 0
堆栈寻址
堆栈既可以向下增长(向内存低地址),也 可以向上增长:
向上生长:即访问存储器时,存储器的地址向高
地址方向生长,称为递增堆栈(ascending stack
)。
向下生长:即访问存储器时,存储器的地址向低 地址方向生长,称为递减堆栈(descending stack)。
堆栈寻址
根据堆栈指针指向的数据位置的不同,它又 可以分为:
<immediate>=immed_8循环右移(2×rotate_imm)
有效立即数问题——数据处理指令二进制编码
寄存器寻址
寄存器寻址就是利用寄存器中的数值作为操作 数,这种寻址方式是各类微处理器经常采用的 一种方式,也是一种执行效率较高的寻址方式 。以下指令: ADD R0,R1,R2 /*R0←R1+R2*/ 该指令的执行效果是将寄存器R1和R2的内容相 加,其结果存放在寄存器R0中。
寄存器寻址
第二操作数为寄存器型的移位操作 在ARM指令的数据处理指令中参与操作的第二操作 数为寄存器型时,在执行寄存器寻址操作时,可以选择 是否对第二操作数进行移位,即Rm,{<shift>},其中 Rm称为第二操作数寄存器,<shift>用来指定移位类型 (LSL,LSR,ASL,ASR,ROR或RRX)和移位位数 。移位位数可以是5位立即数(#<#shift>)或寄存器( Rs)。在指令执行时将移位后的内容作为第二操作数参 与运算。例如指令: ADD R3,R2,R1,LSR #2 ; R3<—R2 + R1÷4
满递减FD(Full
Decrement):
堆栈指针指向最后压入的数据,且由高地址向
低地址生成
入栈:STMFD,出栈:LDMFD 空递减ED(Empty
Decrement):
堆栈指针指向下一个将要放入数据的空位置,且由
高地ቤተ መጻሕፍቲ ባይዱ向低地址生成。
入栈:STMED,出栈:LDMED
STMFD R13!,{R0,R4-R12,LR} ;
注:FD, ED, FA, EA 后缀只在堆栈时使用。F 和 E 分别代表堆栈指针指向为 满或空。A 和 D 分别表示堆栈是否向上或向下生长。 例如:堆栈如果是向上生长,STM 指令向上存放,LDM指令向下读取。 IA, IB, DA, DB 后缀在一般数据传送时使用
相对寻址
与基址变址寻址方式相类似,相对寻址以程序计数器PC 的当前值为基地址,指令中的地址标号作为偏移量,将 两者相加之后得到操作数的有效地址。以下程序段完成 子程序的调用和返回,跳转指令BL采用了相对寻址方式 : BL …… NEXT …… MOV PC,LR ;从子程序返回 NEXT ;跳转到子程序 ; NEXT处执行
3.1.2 ARM寻址方式
寻址方式是根据指令编码中给出的地址码字段来寻找真实操作数的方 式。ARM处理器支持的基本寻址方式有以下七种方式。
立即寻址 寄存器寻址 寄存器间接寻址 基址加偏移寻址 堆栈寻址 块拷贝寻址
相对寻址
立即寻址
立即寻址也叫立即数寻址,这是一种特殊的寻址 方式,操作数本身就在指令中给出,只要取出指 令也就取到了操作数,这个操作数被称为立即数 ,对应的寻址方式也就叫做立即寻址。例如以下 指令: ADD R0,R0,#1 /*R0←R0+1*/ ADD R8,R7,#0x3f /*R8←R7+0x3f*/ 在以上两条指令中,第二个源操作数即为立即数 ,要求以“#”为前缀,对于以十六进制表示的 立即数,还要求在“#”后加上“0x”。
3.2.4 基址加偏址寻址
基址变址寻址就是将寄存器(该寄存器一般称作基址寄 存器)的内容与指令中给出的地址偏移量相加,从而得 到一个操作数的有效地址。变址寻址方式常用于访问某 基地址附近的地址单元。采用变址寻址方式的指令又可 以分为以下几种形式: 前变址模式: LDR R0,[R1,#4] ;R0←[R1+4] 自动变址模式: LDR R0,[R1,#4]! ;R0←[R1+4]、 R1←R1+4 后变址模式: LDR R0,[R1] ,#4 ;R0←[R1]、R1←R1+4
LDMIA R0,{R1,R2,R3,R4} ;R1←[R0],R2←[R0+4],R3←[R0+ 8],R4←[R0+12] STMIA R9!,(R0,R1,R5) STMIB R9!,(R0,R1,R5)
ARM指令的寻址方式
多寄存器寻址和堆栈寻址之间的关系
多寄存器 寻址
堆栈
向上生长 满
有效立即数问题
在32位指令编码中存放32位立即数的方法是: 在ARM数据处理指令中,当参与操作的第二操作数为立 即数型时,每个立即数都是采用一个8位的常数循环右 移偶数位而间接得到。其中循环右移的位数由一个4位 二进制的两倍表示,如果立即数记作<immediate>,8 位常数记作immed_8,4位的循环右移值记作 rotate_imm,有效的立即数是由一个8位的立即数循环 右移偶数位得到。 因此有效立即数immediate可以表示成:
堆栈寻址
从内存管理角度看,堆栈是一块用于保存
数据的连续内存,按如下顺序进行数据存
取:
“后进先出”(LIFO)
“先进后出”(FILO)
指向堆栈的地址寄存器称为堆栈指针(SP
)
堆栈的访问是通过堆栈指针(R13,ARM
处理器的不同工作模式对应的物理寄存器 各不相同)指向一块存储器区域(堆栈) 来实现的。
将寄存器列表中的寄存器(R0,R4到 R12,LR)内容存入堆栈。 LDMFD R13!,{R0,R4-R12,PC} ; 将堆栈内容恢复到寄存器(R0,R4到 ;R12,PC)中
块拷贝寻址
块拷贝寻址是多寄存器传送指令 LDM/STM的寻址方式。LDM/STM指令可以 把存储器中的一个数据块加载到多个寄存器 中,也可以把多个寄存器中的内容保存到存 储器中。寻址操作中的寄存器可以是R0-R15 这16个寄存器的子集或是所有寄存器。
指令格式使用举例 LDR R0,[R1] ; 读取R1地址上的存储单元内容给R0,执行条件AL。
BEQ DATAEVEN ; 条件执行分支指令,执行条件EQ,即相等则跳转到 DATAEVEN。 ADDS R2,R1,#1 ; 加法指令,R2<— R1+1,影响CPSR寄存器(S)。
SUBNES R2,R1,#0x20 ; 条件执行的减法运算,执行条件NE, R1-0x20=>R2影响CPSR寄存器(S)。
所有的操作数都是32位宽,或来自寄存器,或是在 指令中定义的立即数(符号或0扩展);
多寄存器传送示意图
R9' R5 R1 R0 101816 100C16 100016 R9' R5 R1 R0 101816 100C16 100016
R9
R9
STMIA R9! , {R0 , R1 , R5}
STMIB R9! , { R0 , R1 , R5 }
多寄存器传送示意图
101816 R9 R5 R1 R0 100C16 100016 R9 R9' 101816 100C16 100016
3.1.3 ARM指令的详细介绍
ARM指令集总体分为以下6类:
数据处理指令; 程序状态寄存器与通用寄存器之间的传送指令; Load/Store指令; 转移指令; 异常中断指令;