基于链码的二维碎片轮廓匹配算法
基于Freeman链码二维图像轮廓的提取与匹配
和背景在图像 的灰度、颜色或者纹理特征等方面的 差异提取 图像 中不同特征区域间的分界线。边缘信
息包含 了所有的轮廓信息。利用边缘检测技术 ,本 文阐述 了基于F ema 链码二维 图像轮廓 的提取与 re n
匹配算法 。
1图像轮廓 的提取
关键词 :r mn Fe & 链码 ; e 动态规 划算 法; 轮廓提 取 ; 轮廓 匹配
中图分类号 :P 1. T 374
文献标识码 : A
文章编号 :6 l 2 5 (0 60 0 2 ・ 3 17 _ 132 0 )5・ 0 4 0
0引言
用链码表示线条模式 的方法最初是 由F ema re n 在 16 年提 出的 ,根据二维线条的不同走势方向 , 91
踪结束 , 所有存储点 的集合就是一 幅完整 的轮廓 图
像点 的信息 ,如 图 3 所示 。
21 1
4 0
配 问题就转换成了序列联配( tec l n n)  ̄: nea g met问 u i
题 。Nede n Wu sh首先将动态 规划编程 的 e lma 和 nc 思想 引入到序 列联配 中来 ,设 计 了 Ne d e n e lma — Wu sh动 态规划算法 。动态规 划算法 是在建立动 nc 态规划 矩阵的基础上 , 计算矩阵 中每一元素相对应 的联配得分 ,得到序列联配得分矩阵 ,同时记录联 配分数的获取路径 , 根据路径所描述的序列联配的 具体信息 , 回溯 路径 , 用递归 的方法得到联配结果 。
收稿 日期 :0 6 5 2 20 —0 — 2
作者简介 : 姚文君(9 1 ) 17 - ,女 ,浙江宁波人 ,东南大学 无线 电工程系硕士研究生 。
二维非规则碎片匹配的算法
M a c i gAl o i m f wo d m e so a r e u a a m e t t h n g rt h 0 T — i n i n l r g l rFr g n s I
Z a - a Z HU Y nj n, HOU L i h i L UY u a. u I i s ,
中 蟹分类号:P1 T31
二 维 非规 则碎 片 匹 配 的算 法
朱延娟 ,周来水 ,刘 毅
(.同济 大学 航 空航 天 与 力 学 学 院 ,上 海 20 9 ;2 1 00 2 .南 京 航 空 航 天 大 学 CA CA 工 程 研 究 中 心 ,南 京 2 0 1 ) D/ M l0 6
p i t n t e c n o ra e d t c e a e n t ec r au e o v r o n . e f a u e p i t n t egh r o d p i t c n t ut e t r e o n s o h o t u r ee td b s d o u v t r fe ey p i t Th e t r o n d i n i bo h o o n s o si e ff au e s gme t h a s t l n. h s t e c n o r ma c i g t s s r d c d i t i l iy me s r nd f a i ii e i ai o e t r e me s T u h o t u th n a k i e u e n o s mi rt a u e a e sb l y v rfc t ff a u e s g nt.Th th b e c n o r e a t i on e ma c a l o t u s a r r t t d a d ta sa e O f l l f a me t e s e l .Th n t e d tc i s c ri d ou u o t a l,f r c e k n e h r t e e a e o e l p o ae r n l td t u f l r g n s r a s mb y n i e ee t h on i a re t a t ma i ly o h c i g wh t e h r v ra s c r b t e e t o t r n e i t a s o m a i n h e c n o r wi o t o e l p a e f r e O f n w o t u ,a d t e e we n t wo c n ou s u d r t s r n f r to .T o t u s t u v ra o h h h r m d t e c n o r n mac i g p o e s i l h thn r c s s c nt u d u tl e r c n tu to sf l l d T ee p rme t l e u t e n ta e t e ag rt m se ce t n ob s. o i e n i t e o sr c i n i u f l . n h i e h x e i n a s l d mo sr t h l o h i f i n d r u t r s i i a
基于序列图像的二次曲面体轮廓曲线匹配
基于序列图像的二次曲面体轮廓曲线匹配摘要:该文提出一种二次曲面体轮廓曲线匹配方法。
首先提取图像的轮廓边缘,用分段二次曲线描述边缘,得到每段曲线的坐标点集并进行标准化;再对经标准化后的坐标进行二次曲线拟合,得到二次曲线方程的参数;最后通过二次曲线的三个不变量来进行曲线匹配。
实验表明,该方法能够有效地匹配二次曲面体轮廓边缘,并具有较高的匹配精度。
关键词:曲线匹配;边缘检测;曲线拟合;二次曲线;不变量中图分类号:tp311 文献标识码:a 文章编号:1009-3044(2013)11-2695-04轮廓曲线匹配[1]是计算机视觉的一个基本问题,它是衡量形状间相似性的一种技术,在众多领域得到了广泛的应用,如文字识别、图像的拼接、基于内容的图像检索等。
因此,开展轮廓曲线匹配技术的研究具有重要的理论意义和实用价值。
根据工业物体大多是二次曲面的特点,该文主要研究二次曲面体的轮廓曲线匹配。
关于轮廓曲线的匹配算法,国内外学术界进行了广泛的研究。
文献[1]提出了基于曲率特征的轮廓匹配方法,首先对轮廓曲线进行多边形近似,然后通过 hermite插值曲线求出多边形各顶点的曲率作为特征,最后以hausdorff距离为准则进行轮廓线匹配。
文献[2]针对普通曲线匹配算法不能处理旋转和缩放曲线的不足,提出freeman链码描述的曲线匹配方法。
但如果误检测的角点较多,就会大大影响匹配效果。
文献[3]把轮廓曲线进行多尺度平滑,计算曲线的特征矢量,通过比较特征矢量以判断轮廓曲线的相似性,实现三维曲线匹配。
文献[4]提出了一种基于复数矩的形状轮廓描述与匹配方法,利用串匹配算法实现了形状的轮廓匹配,但其匹配正确率有待提高。
本文主要研究序列图像二次曲面体轮廓曲线的匹配,提出一种以二次曲线的三个不变量作为匹配基元对二次曲面体的边缘曲线进行精确匹配方法。
这种方法以具有稳定结构的棱线做匹配基元,具有更好的精确性。
同时该算法简单,处理时间较短,有利于硬件实现。
二维碎片轮廓曲线的匹配算法_刘爽
d ;
+
Y( t, ) = y( t) * G ( t, ) =
( t1 e 2 2 )2
2
-
y( )*
d 。
1. 2
离散点曲率的计算
对于具有二阶连续导数的曲线 , 曲线在各点处
为权值, 将积分离散化后 2 d 为步长。对于所取步长 , 不可能保证每一个权 值都与轮廓曲线上的离散点一一对应。为此, 运用 e 一种线性插值的 方法对轮廓曲 线进行重新采样。 给定两个点 P i 和 P i+ 1 , 由式 ( 3) 计算得插入点 Pt 的值 :
电气技术与自动化
刘
爽 , 等 二维碎片轮廓曲线的匹配算法 到[ 6] , 而经过实 际测量得到的 二维碎片轮廓 曲线 是由离散的数据点组成的, 不能通过这样的方法计 算曲率。本文运用一种对轮廓曲线插值的方法计 算轮廓曲线在各离散点的曲率。 首先 , 通过卷积积分的方法对各离散点去噪 , 使原始数据能够尽可能减少由于各种原因 ( 例如 : 测量仪器存在缺陷 ; 噪声的影响或者对曲线的不均 匀采样等 ) 带来的误差。具体说来 , 设二维轮廓曲 线可用式 ( 2) 表示: r = ( x ( t) , y( t) ) , ap } 和 B
两条轮廓曲线的相似程度 , 首先根据公式 ( 4) 计算 出两条轮廓曲线上所有离散点的曲率, 然后遍历两 条轮 廓曲 线上 的 数据 点集 合 P 1 = { p
1 n- 1 } 1 p 0,
p
1 1,
,
和 P2 = {
2 p 0,
p
2 1,
,
2 p m- 1 } ,
Yt ( t , ) = Ytt ( t , ) =
t
(y ( t ) * G( t, ) ) = y ( t ) * G t ( t , );
二维轮廓曲线匹配算法研究
1 常见 的二 维轮 廓 线 匹配 算 法
形状 匹配是 通过一 定 的度量 准则来 衡量 形
收稿 日期 :0 70 —4 2 0等 .二 维 轮廓 曲线 匹配算法 研 究
距离 来 度 量分 段 轮廓 之 间 的相 似 性 , 获得 匹 配
结果 。Hea aC i iad maL i o3等 人 ln r t aGa et l sn a_
介绍 了一种 重新 组装二 维碎 片 的算 法 。该算 法
的 中心 思 想是 定 义一 个 判别 式 和 一个 门限值 ,
貌 。能 够合成 原貌 的两 片碎 片 中的那两段 对应
边 称 为一 个 匹配 , 匹配 的两条 边 中互 相 匹 配 的
点称为 对应 点 。在 这些 碎 片 匹 配 问题 中 , 及 涉 到一个重 要 的数学 问题 , 就是 曲线 的匹配 。 这 当碎 片数 量特 别 大 时 , 手 工 的方 法 把 大 用 量 的碎 片 复原 是 一项 非 常 困难 的工作 , 把 许 而 多碎 片重新 恢 复成一个 整 体 的作 用是不 言 而喻 的 , 如 考 古 的 碎 片 , 安 破 案需 要 的破 碎 照 例 公 片 , 贵而 破碎 的艺 术 品 。因此 碎 片 匹 配 不 仅 珍 具有学 术价 值 , 同时具 有非 常重要 的现实 意义 。 笔 者提 出一 种 高效 的 曲线 匹 配算 法 , 该方 法充分 利用 了轮廓 的局 部特征 点信 息和特 征点 之 间轮 廓 曲线段 的几 何属 性 确 定候 选 匹配 段 , 提高 了 匹配 的运 算 速 度 , 最后 应 用特 征 段 之 间 Ha so f距 离来 验 证 匹配 , 高 了 曲 线 匹 配 ud r f 提
轮廓匹配原理

轮廓匹配原理轮廓匹配是一种图像处理方法,用于比较和匹配图像中的轮廓。
它可以用于物体识别、目标跟踪、图像匹配等领域。
本文将介绍轮廓匹配的原理、应用及优缺点。
一、轮廓匹配的原理轮廓匹配的原理是通过计算图像中物体的轮廓特征,然后将其与预先存储的模板进行比较,从而判断物体是否匹配。
其基本步骤如下:1. 图像预处理:首先对输入图像进行预处理,包括灰度化、二值化、滤波等操作,以便获取物体的轮廓。
2. 轮廓提取:利用边缘检测算法(如Canny算子)提取图像中的轮廓。
3. 轮廓匹配:将提取得到的轮廓与模板进行比较。
常用的匹配方法有基于形状的匹配(如Hu矩)、基于统计的匹配(如归一化相关系数)、基于几何特征的匹配(如面积、周长)等。
4. 匹配度评估:根据匹配结果计算匹配度,可以使用欧氏距离、相关系数等指标。
二、轮廓匹配的应用1. 物体识别:通过比较待识别物体的轮廓与数据库中的模板进行匹配,实现物体识别和分类。
2. 目标跟踪:在视频监控、自动驾驶等领域中,通过与模板匹配,实现对目标物体的跟踪和定位。
3. 图像匹配:在图像检索、图像拼接等应用中,通过比较图像的轮廓特征,寻找相似或相同的图像。
4. 缺陷检测:在制造业中,通过比较产品轮廓与标准模板,实现对产品缺陷的检测和分类。
三、轮廓匹配的优缺点轮廓匹配具有以下优点:1. 鲁棒性强:轮廓匹配对图像的光照、尺度变化和一定程度的噪声具有较好的鲁棒性。
2. 计算简单:轮廓匹配只需要计算轮廓特征,不需要对整个图像进行处理,因此计算复杂度较低。
3. 灵活性高:轮廓匹配可以根据具体应用需求选择不同的匹配方法和参数,具有较高的灵活性。
然而,轮廓匹配也存在一些缺点:1. 对噪声敏感:轮廓匹配对图像中的噪声比较敏感,噪声会引入误匹配的情况。
2. 对形变敏感:轮廓匹配对图像的形变比较敏感,当物体发生形变时,匹配结果可能不准确。
3. 对遮挡敏感:轮廓匹配对图像中的遮挡比较敏感,当物体被遮挡时,匹配结果可能不可靠。
基于Freeman链码二维图像轮廓的提取与匹配
基于Freeman链码二维图像轮廓的提取与匹配
姚文君
【期刊名称】《宁波职业技术学院学报》
【年(卷),期】2006(10)5
【摘要】在边缘检测技术的基础上,利用Freeman链码的性质实现了二维图像轮廓的提取;并运用动态规划编程,提出了一种新的图像轮廓匹配算法.结果表明,该算法比传统的图像轮廓匹配算法更简洁有效.
【总页数】3页(P24-26)
【作者】姚文君
【作者单位】东南大学,无线电工程系,江苏,南京,210096
【正文语种】中文
【中图分类】TP317.4
【相关文献】
1.基于Android平台的地震云轮廓提取与匹配研究 [J], 苏琳琳;关桂霞;赵海盟;谭翔;徐振亮;吕书强;马蔼乃;晏磊
2.基于闭合轮廓提取和部分特征匹配的飞机识别 [J], 张名成;吴秀清;王鹏伟
3.基于轮廓匹配的前视红外建筑目标提取 [J], 刘松林;李新涛;巩丹超;赵明瑜;
4.基于特征线匹配的建筑轮廓线提取算法仿真 [J], 郭可义;李晶
5.基于轮廓提取模板匹配方法的雷康自动识别系统设计 [J], 郭旭;张瀚斌
因版权原因,仅展示原文概要,查看原文内容请购买。
基于链码和多线程的图像分段轮廓跟踪

多线程的图像分段轮廓跟踪方法,并进行了程序实现。 1 基于多线程和链码的轮廓跟踪
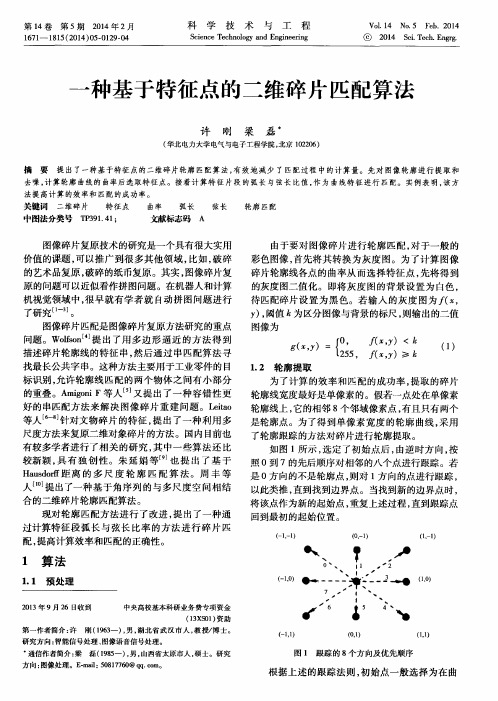
1.1 链码和链码表 链码采用中心点指向它的 8 个邻点的方向来定义,如图
2 所示:ຫໍສະໝຸດ 图 1 太湖太湖湖岸线分属 江浙两省,需要对 某省湖岸线轮廓单 独进行或两省湖岸线轮廓同时进行轮廓跟踪。现有的轮廓跟 踪方法一般是按某种探测准则找到第一个边界点,然后对整 个区域轮廓进行跟踪,但当整个区域轮廓又分为几段,而根 据实际需要只需跟踪某几段轮廓时,现有的方法不能达到这 样的目的。同时,若跟踪时需要进行其它耗时操作(如边跟 踪边将跟 踪结果写 入文件等) 或各段轮 廓的跟踪 存在交互 (如其中一段轮廓的跟踪依赖于另一段的跟踪结果)时,如 果采用逐段按顺序跟踪的方法,则程序主界面需要等待整个 跟踪过程 结束才能 响应用户输 入,这造 成程序界 面的不友 好,影响人机交互;而且各段轮廓的跟踪相互独立,彼此之 间不能相互联系。由于多线程具有多任务、并发性、线程间 易于通信、后台运行不影响主界面等特点,能满足对多区段 轮廓同时或单独进行轮廓跟踪的需求,因此,在对基于链码 [1]的轮廓跟踪 算法[2~4]进行改 进的基础上,本文 提出了基于
Micr ocomputer Applica tions Vol. 27, No. 12, 2011
研究与设计
微型电脑应用
2011 年第 27 卷第 12期
文章编号:1007-757X(2011)12-0030-03
基于链码和多线程的图像分段轮廓跟踪
李贞培,李平
摘 要:针对将图像轮廓分段,并对每段轮廓单独进行或对所有段轮廓同时进行轮廓跟踪的需求,提出了基于链码和多线程
基于链码的轮廓跟踪过程是:从区域边界上的跟踪起点 出发,依次搜寻下一边界点,找到下一边界点后将进入该点 的链码存入链码表,并将该边界点置为当前边界点,然后确 定新的探测始点链码,进入下一个边界点的搜寻,直到跟踪 结束为止。 1.2.2 探测始点的确定
基于角序列的二维碎片轮廓匹配算法
第 7卷 第 1 5期 20 0 7年 8月 17 - 89 20 )5 35 -4 6 1 1 1 (0 7 1-7 70
科
学
技
术
与
工
程
Vo . No. 5 17 1
Au . 20 7 g 0
S e e Te hn lg n En i e i g cinc c oo y a d gne rn
碎 片。
( ) 片 的拼 接 合 并 , 相互 匹 配 的碎 片拼 接 3碎 将
在一起 得 到最 终 的结果 。
1 角序列匹配算法
轮廓 线 的特 征 串 表 示 是 匹 配算 法 的 基 础 。特
征值的选取及计算直接影 响匹配 的结果。同时, 由
于每 块碎 片 是 独 立 扫 描 的 , 方 向也 是 任 意 的 , 其 因 此 , 轮 廓 线 的 特 征 表 示 必 须 是 旋 转 和 平 移 不 变 其 的。碎 片拼接 问题 是 轮 廓 线 的 局 部 匹 配 , 须 采用 必 局部 边界 描述 符 。 由于 角 度 在 刚 体 运 动下 不 变 , 并
⑥
2 0 S i T c. nn . 0 7 c . eh E gg
基于 角序列的二维碎 片轮廓 匹配算法
周 丰 黄 晓 呜
( 京 交 通 大 学 理 学 院 数 学 系 , 京 104 北 北 0 04)
摘
要
提 出了一种基于角序列 的二维碎 片轮廓 匹配 算法 , 用于获 得两块 碎 片间的最 可能 的拼 接结 果。将该 算法 与多尺度
线可用 样 点 的位置 坐标 序列 表示 。
对 于碎 片 的轮 廓 匹 配 , 内# g 多学 者提 出 了 国 tl - ̄ 大量 的算 法 。如 ,ea … 探 讨 了多 尺 度 技 术 在 Lio等 t 轮廓 匹配 方 面 的 应 用 。K n og等 提 出用 轮 廓 线 的 近似 多 边 形 的 配 合 情 况 来 衡 量 碎 片 的 匹 配 程 度 。 朱延 娟 等 提 出基 于 Hasof距 离 的多 尺 度 轮 廓 udr 匹配算 法 等 。这 些 算 法 都 在 一 定 程 度 上 对 轮 廓 进 行 了匹配 , 但是 它们 大多 是 采 用 轮 廓 曲线 上点 的 曲 率特 征进 行 匹 配 , 就存 在 了尖 角 问 题 ( 文 称 曲 这 本 率无 穷 大点 为 尖 角 ) 一 些 尖 角会 因 平 滑 受 到 破 坏 , 或者 无法 表示 。而 尖 角 在 碎 片 拼 合 过 程 中具 有 更 为重 要 的作用 , 规则 碎 片 的轮 廓 线 上存 在很 多尖 不
一种基于特征点的二维碎片匹配算法
1 算法
1 . 1 预 处理
2 0 1 3年 9月 2 6日收到 中央高校基本科研业务费专项资金 ( 1 3 x s 0 1 ) 资助
2
( _ l ' o )
刚( 1 9 6 3 一) , 男, 湖 北省武 汉市 人 , 教授/ 博 士。 磊( 1 9 8 5 一) , 男, 山西省太原市人 , 硕士。研究
⑥
2 0 1 4 S c i . T e c h . E n g r g .
一
种基于特征点 的二维碎 片匹配算法
许 刚 梁 磊
( 华北 电力大学 电气与 电子工程学院 , 北京 1 0 2 2 0 6 )
摘
要
提 出 了一种基 于特征 点的二维碎 片轮廓 匹配算法 , 有效地 减少 了匹配过 程 中的计算 量。先对 图像 轮廓进 行提取 和
, ,
碎片轮廓线各点的 曲率从而选择特征点 , 先将得到 的灰度图二值 化。即将灰度 图的背景设置为 白色 , 待 匹配 碎 片设 置 为 黑 色 。若 输 人 的灰 度 图为 f ( , Y ) , 阈值 k 为 区分 图像 与背 景 的标尺 , 则输 出的二值 图像 为
过计算特征段弧长与 弦长 比率 的方法进行碎 片匹 配, 提 高计算 效 率和 匹配 的正确 性 。
去噪 , 计 算轮廓 曲线的 曲率后选取特征点 。接着计 算特征 片段 的弧长 与弦长 比值 , 作 为 曲线特 征进 行 匹配。实例表 明, 该 方
法提高计算 的效率和 匹配的成功 率。
关键词 二维碎片
特征 点
曲率
弧长
弦长
轮廓 匹配
中图法分类 号 T P 3 9 1 . 4 1 ;
基于轮廓线匹配的2-D碎片拼接研究
1 问题 和预 处 理
破碎物体数量 的增加 , 导致一 条轮廓 曲线可能 和其它许多 破碎物体的轮廓曲线匹配 , 这样就形成 了匹配轮廓线对的集合 , 从复原 的 目的看 , 仅有一对是 有效的 , 利用全局搜索方 法 , 找出 其有效的一对匹配的轮廓线就是拼接研 究的首要 问题 。显然这
原 形状 的 首 要 一 步 就 是 找 出 匹 配 的 曲线 对 。
对是有效的 , 即能形成物体 的原形状 。目前 , 许多 学者专 注于
匹配的研究 , 碎片用轮廓 曲线表示 , 轮廓 曲线先进行局部 匹配 用
进 而 进 行 拼 接 重 构 , 一 方 法 仅 对 两 个 碎 片 时 是 可 行 的 。 当 碎 这
Ab t a t sr c
T e d f c l fr 一 e l fa lr e n mb ro rg lrf g n si n lz d a d a p l y fr2 D f g n sr — s e l s h i u t o e  ̄s mb y o a g u e f re u a a me t sa a y e , n o i o - a me t e a s mb yi i y i r c r
配 ; 后 通 过全 局 搜 索拼 接 重构 物 体 形 状 , 然 由于 匹 配 的 特征 集选 择 了带 有 几 何 结 构 属 性 的连 接 点 , 点是 不 仅 局 部 匹 配 的 速 度 提 高 优 而且 全 局 拼 接 重 构 的有 效 性 提 高 。 试验 对 比表 明提 出的 算 法 更 有 效 。 关 键 词 轮廓 线 匹 配 拼 接
题 的研究是将这一 问题看 成物体识 别问题 的特殊情 况 , 即通过
物体 的轮廓线识别 。因此 , 自动拼接 问题可 以描述为 : 首先给定 碎 片的轮廓 曲线 的子 曲线 匹配对 , 然后在这 些 匹配 对 中确定 哪
二维碎片的轮廓匹配方法
二维碎片的轮廓匹配方法
一、简介
轮廓匹配是指在图像处理和计算机视觉中一种常用的匹配方法,其目
的是将其中一个物体的轮廓与其他物体的轮廓进行匹配,以找出相同物体
或者类似物体。
轮廓匹配可以用于图像中的特征,也可以用于图像分类、
寻找图像内容中的结构以及查找相似的形状,以此作为精准识别或跟踪目
标的基础。
而二维碎片的轮廓匹配则是指将二维碎片物体的轮廓进行匹配,以及构建二维碎片的轮廓特征。
二、二维碎片匹配原理
二维碎片轮廓匹配是基于经典轮廓匹配算法,有两个主要步骤:
1.提取轮廓。
首先,需要从图像中提取二维碎片的轮廓,需要进行图
像预处理,以增强边缘,然后运用Canny边缘检测算法提取二维碎片的轮廓。
2.构建轮廓特征。
接下来,需要构建二维碎片的轮廓特征,例如,可
以使用中点矢量,圆环矢量和特征矢量等特征矢量来构建特征矢量。
最后,可以使用最小二乘法来拟合二维碎片的轮廓特征,从而得到最佳的匹配结果。
三、二维碎片匹配的优点
1.可以识别复杂的形状:二维碎片的轮廓匹配可以有效识别复杂的形状,如圆形、三角形等,因此可以大大提高识别效率。
2.精确的匹配:二维碎片。
一种基于链码向量的图像匹配算法
■
网 3 玉噪后 的边缘
】
假边缘均得到有效 的去除。
2 边缘特征 匹配
在数字图像中 , 边缘是 南一系列离散的像素点组成的。边 界链码是对图像边缘点的一种编码表示方法 ,其特点是利用一 系列具有 特定长 度和方 向的相连 的直 线段来 表示 目标 的边缘 。
根据链的斜率不同 , 4向链码和 8 有 向链码 ,如图 4 所示 。 在数字图像中,任意像素点周 围均有 8 个像素点,8向链
中图分类号 :T 3 1 1 P 9. 4 文献标志码 :A 文章编号 :10 — 8 X 2 1)6 0 2— 4 0 7 94 (0 1 — 0 5 0 0
图像匹配是 目 标识别 、图像合成 、视频监控 、 计算机视觉等领域中的核心技术之一”。迄今为止,图 。
像匹配领域的研究者们提出了多种匹配算法 ,可归纳为两大类 ,即密集点匹配和稀疏点匹配。密集点匹配
) 和 ) 。现将 {:所有的方向值构成向量 ,对 ) a) 也做 同样的处理 ,得到向量 。使用的匹配原则
是 : 个链码向量 和 的夹角越小 ,则 2 2 个边界链码匹配度越高 ;反之 ,匹配度越低。2 个向量的夹角
可 以通过 下式计算
c 础 :
:
1 lI I j】 ×
本文提出的图像匹配算法是 以边缘轮廓为匹配基元 ,丰富的边缘曲线能够在更大程度上准确的描述 目 标体的内在信息 ,因此对图像中 目标体边缘信息检测的精度直接决定了后续图像匹配的成功与否。好的边
缘检测算法不仅能够检测到丰富的边缘轮廓 ,而且还能够有效 的克服噪声的影响。
Lp c 算子是一种常用的边缘检测算子 , al e a 它具有旋转不变性和位移不变性的优点 , 但同时也具有丢失 边缘方向信息和加重噪声的缺陷。因此通常的做法是把高斯平滑滤波和 Lp c al e算子结合起来 , a 先平滑掉 噪声 ,再进行边缘检测 。针对现有的 Lpae算子的缺陷 ,以及为满足边界链码 向量匹配对边缘信息精度 al c
基于轮廓特征与文字特征的二维碎片匹配
基于轮廓特征与文字特征的二维碎片匹配马元魁;牛浩时【摘要】针对二维不规则实物碎片,提出了一种基于多种碎片特征的碎片匹配算法.对碎片进行预处理,提取碎片的轮廓特征以及文字特征.文中主要采用高斯滤波对图像进行平滑,基于数学形态学边缘检测算法进行边缘检测,基于曲率尺度空间进行角点检测.通过提取角点处的灰度值进行刻画碎片的文字特征.对提取的角度特征和灰度特征进行加权,应用模式匹配算法寻找其公共子列进行特征匹配.通过数值实验,可以得到较好的匹配效果,且算法简单,降低了匹配误差.%An algorithm for fragments matching based on contour features and character features is proposed to solve the problem of 2D irregular fragments.The fragments are preprocessed first,and then their contour features and character features are extracted.In this study,Gaussian filter was used for image smoothing,the mathematical morphology edge detection for the edge detection,and the curvature scale space for the corner detection.Grey values of corners were extracted to describe the character features.Then the contour features and character features were weighted.Finally the pattern matching algorithm was used to find the public column to match the features.The results show that the proposed algorithm is simple and reduces matching errors with good matching result.【期刊名称】《西安工业大学学报》【年(卷),期】2017(037)001【总页数】7页(P36-41,86)【关键词】碎片匹配;轮廓特征;文字特征;角点控制【作者】马元魁;牛浩时【作者单位】西安工业大学理学院,西安710021;西安工业大学理学院,西安710021【正文语种】中文【中图分类】TP391日常生活中我们时常会遇到不小心将花瓶打碎,或者把重要的票据撕碎,遇到这种情况这就需要我们把那些碎片一个一个的拼接起来,复原物体原来的形状或结构,这样的工作看似普通却大有用处,碎片复原在司法物证复原,历史文献修复、军事情报获取以及文物复原等领域都有着重要的应用.传统上,拼接复原工作需由人工完成,准确率较高,但效率很低.特别是当碎片数量巨大,人工拼接很难在短时间内完成任务.随着计算机技术的发展,人们试图开发碎片的自动拼接技术,以提高拼接复原效率.目前,在国际上,德国等发达国家对碎片的自动修复技术有了相当长时间的研究.但由于技术封锁的原因,能够得到的资料微乎其微.而在国内,还没有相对成功的研究成果问世.因此结合应用背景,把计算机视觉和模式识别应用于碎片复原,开展对碎片匹配的研究具有重要的理论和现实用意义.关于二维不规则碎片复原需要提取碎片的特征进行碎片复原,目前国内外关于提取碎片特征这方面的研究主要集中在以下三方面:文字特征、边界特征、纹理特征. 国外方面,文献[1]提出的算法主要思想是根据特征点的相似性和与邻域的距离得到初始概率,然后不断地迭代,直到特征点的概率达到稳定值,提出的这种概率框架的曲线匹配算法,也适合于平面曲线的匹配.文献[2]提出先把曲线用同心圆的角度的集合重新表征,并要求两条曲线匹配的条件是对应的同心圆的角度集合必须相等,并以此条件进行曲线匹配.文献 [3]把轮廓线先进行曲率编码,实质上也就是用特征向量来重新表征轮廓线,然后比较曲率编码的轮廓线是否匹配.在国内,近几年也有一些研究成果.文献[4]基于同一文档的字体大小、行高等文字特征基本相同,这些信息的提取方便可行,基于这一思路提出基于文字特征的文档碎片拼接复原方法.主要提取的文字特征有文档碎片左侧白色灰度距离及文档碎片中心距离向量,通过得到文字特征建立中心匹配法及最小距离模型,对文档碎片进行拼接复原.文献[5]则主要从碎纸片中文字和背景的灰度值差异出发,通过对比任意两张图片灰度值矩阵边界找到相互匹配的纸片.文献[6]提出了一种基于动态聚类的文档碎纸片自动拼接算法.基于边界特征的拼接方面,文献[7]则提出基于线段扫描的碎纸片边界检测算法和罗智中[8]对边缘相似的碎纸片的拼接,提出了利用文字行方向和表格线方向的算法.文献[9]分别针对中文、英文文件碎片设计不同拼接复原算法,并针对双面文件开发了全自动拼接算法.文献[10]利用Fourier 变换谱分析方法进行拼块的纹理分析,提取拼块的纹理特征,根据图像的纹理特征找到具有与某拼块相似纹理的拼块组.文献[11]以概率论中的区间估计为理论基础,建立了基于区间估计与矩阵像素点匹配算法的碎片拼接模型.文献[12]提出一种结合碎片边缘轮廓和断裂面匹配的混合拼接方法.文献[13]利用改进遗传算法实现图像特征点的匹配,其算法是一种匹配策略或框架.文献[14]提出用小波变换结果的局部范围内的极大值进行信息检测和定位,从而提取图像的角点.文献[15]提出了基于Fourier变换的曲线匹配算法,通过比较两条曲线的Hash矢量来分析曲线的相似度.从国内外的研究情况来看,虽然碎片复原技术已经取得了一定的研究成果,但其中还有很多需要改进和深入研究.例如很多的研究都只围绕着单一的碎片特征进行,很少能将多种特征结合起来应用于碎片的复原当中.文中把轮廓特征和文字特征相结合进行碎片匹配,可以降低匹配误差,提高匹配效率.1.1 碎片的预处理文中假设已经用平面扫描仪或照相机对实物碎片进行了数字化处理,获取了图像碎片.在图像碎片预处理阶段,主要考虑滤波噪声和锐化边缘处理.图像处理常见的噪声有:高斯噪声、瑞利噪声、伽马噪声、指数分布噪声、均匀分布噪声等,文中采用高斯滤波器去除噪声.去除噪声的同时可能使图像碎片变的模糊而退化,为了使边缘和轮廓更清晰,需要对图像碎片进行锐化.1.2 文字特征提取对图像碎片进行预处理之后,接下来提取碎片的文字特征.通过提取图像碎片的像素灰度值进行刻画的,所以如果原始图像是彩色图像,首先进行灰度化.首先建立图像碎片所在坐标系,图像碎片的每一个像素都对应自己的坐标.像素灰度值以矩阵的形式保存,图像中的每一个像素都对应矩阵中的一个值,这样,矩阵中的每一个灰度值都对应一个坐标.在特征匹配过程中,将特征点(比如角点)的灰度值从矩阵中提取,存储在相应的数组中以用于匹配.1.3 轮廓特征提取轮廓特征提取包括对图像碎片进行轮廓线提取,即提取图像碎片的边缘,然后提取轮廓线的角点.由于提取的边缘不仅包括碎片轮廓,而且也包含了碎片内部文字的边缘,所以在提取轮廓线的角点之前需要对图像进行填充,去掉内部的文字.文中主要基于数学形态学边缘检测算法[16]进行边缘检测,基于曲率尺度空间的角点检测的算法进行角点检测[17].数学形态学图像处理可以简化图像数据,保持他们基本形状特征,并除去不相干的结构.数学形态学的基本运算有四个:腐蚀,膨胀,开启,闭合.轮廓形状表示方法分为两类:一类是编码,一类是对轮廓的简化表示形式.简化的轮廓就是提取一些重要意义的关键点.角点是图像边缘曲线上曲率极大值的点.这些点在保留图像图形重要特征的同时,可以有效地减少信息的数据量,使其信息的含量很高,有效地提高了计算的速度,有利于图像的可靠匹配.所以对图像碎片轮廓的角点进行了提取.在提取轮廓线的基础上,基于曲率尺度空间的角点检测的算法具体步骤如下[17]:①用一个固定的低尺度值计算轮廓曲线上任意一点处的曲率.②把局部曲率最大点放入候选角点集.错误角点可以分为边缘噪声干扰产生的角点和圆角点,分别剔除这两类错误角点,最后得到正确角点.③在较低的尺度下对已提取的角点进行定位.对角点序列的匹配是通过角点的一些特征作为角点匹配条件,文中采用文献[18]的方法选取角点处的角度作为判定角点的匹配条件,对于两个碎片的匹配处,以角点为顶点的角度应该相同.文中把图像碎片的像素灰度值作为进行图像碎片匹配的另一个特征.将角度特征和灰度特征进行加权,得到综合特征,用于匹配,可以降低匹配的误差,提高匹配的准确性和效率.把角点的坐标以二维数组的形式存储,以相邻的三个角点之间的夹角的度数作为匹配的依据,对从二维数组的第二对元素开始到倒数第二对元素,分别根据相邻三个点的坐标计算每个角点处的度数,并存储.对第二张碎片,因为要与第一张碎片的角点相匹配所以需要对其坐标进行逆序存储之后再计算每一点的角度值.根据上一步骤计算出两个碎片的角序列,设它们分别为a={ai|i=1,2,3…},b={bi|i=1,2,3…}在碎片匹配的过程中容易知道匹配点的角度应该是相同的.如果‖ai-bi‖<ε,其中ε为容许误差,则认为第一条轮廓上的第i个点和第二条轮廓上的第j个点匹配.这样就可以把a和b看作两个字符串,求得两个字符串的最长公共字符串.依据模式匹配算法(Knuth-Morris-Pratt,KMP)[19]的思想来查找两个最长公共子序列.对于互补的轮廓,两轮廓线上的灰度值理论上也应该是相同的,由于图像的质量易于受到拍照环境的影响而发生变化,所以,当提取碎片时,应尽量保证碎片的拍照环境要相同.通过上一节已经检测到了图像的角点的位置,将每一角点的灰度值从矩阵中提取,存储在相应的数组中,同样通过模式匹配的方法,便可以找出在误差范围内的最长的灰度匹配序列.通过以上方法可以找出角度特征和灰度特征各自最长的公共子序列,然后取二者的交集,将交集对应的角点处的角度特征和灰度特征进行加权,得到综合特征,用于匹配,可以降低匹配的误差.文中的特征提取主要有以下几个步骤:① 对已有碎片图像进行预处理,将其变换成实验所需的碎片图像格式.② 对碎片图像进行文字特征提取.③ 基于数学形态学方法对图像进行边缘的提取,提取的边缘不仅包括碎片轮廓,而且也包含了碎片内部文字的边缘.④ 对图像进行填充,去掉内部的文字.⑤ 应用基于曲率尺度空间的角点检测的算法对碎片进行角点检测.图1和图2是经过高斯滤波预处理的碎片.图3和图4是应用数学形态学方法检测的碎片轮廓.图5和图6是应用基于曲率尺度空间的角点检测算法检测的角点.碎片1和碎片2的数据见表1~2.根据KMP算法进行模式匹配,寻找最长匹配的角度序列.找到的最长公共子序列见表3(误差在5度以内).对于碎片1和碎片2的角点处的灰度值信息应用KMP算法寻找它们的在误差(误差在5以内)范围内的最长公共子序列得到表4.对于表3和表4中的角点的角度信息和灰度信息,寻找它们的公共子序列见表5.分别对角度值和灰度值做加权,若取角度权值为0.9,灰度权值为0.1,并计算它们的和作为匹配序列,见表6.对表6角度和灰度的公共子序列可以计算两个序列的欧氏距离衡量序列的相似度.距离越小表示两个序列的匹配程度越高.通过比较表3和表6相应角点之间的误差可以看出,加入了灰度值之后的匹配序列的误差相较于只有角度信息的匹配序列明显下降.将表5中碎片1和碎片2的角度和灰度分别赋以不同的权重相加得到关于碎片1和碎片2的两个特征序列,计算这两个特征序列之间的距离,得到表7.由表7可以看出当角度的权重和灰度的权重分别取0.6,0.4时,公共子列的匹配程度最高.匹配过程中,加入了灰度信息以后(即灰度权重不为0)的距离都小于只用角度信息进行匹配的距离(灰度权重等于0).通过以上的分析可以看出在碎片匹配中,轮廓特征和文字特征都是非常重要的要素,两者结合起来应用于碎片匹配效果更好,在以后的研究中应该注重于将多种要素结合,以达到更好的效果.文中研究的主要问题是如何根据二维碎片的特征进行碎片匹配.本文应用数学形态学方法进行了边缘检测,采用了基于曲率尺度空间的角点检测方法对碎片的角点进行检测,并提取了角点处的灰度信息作为文字特征,把轮廓特征与文字特征进行加权,应用模式匹配方法寻找最长匹配序列,进行匹配.降低了匹配误差,提高了匹配效率.不足之处是只利用了角点处的灰度信息,碎片轮廓边缘的大量的灰度信息未能有效利用.尺度空间的几何不变相关理论在三维空间是成立的,所以文中的碎片匹配方法可以扩展到三维空间.(in Chinese)[16] 孙明.数字图像处理与分析基础—Matlab和VC++实现[M].北京:电子工业出版社,2013.SUN Ming.Digital Image Processing and Analysis Based on MATLAB and VC++[M].Beijing:Electronics Industry Press,2013.(in Chinese)[17] 汪华琴,谈国新,钱小红,等.一种基于曲率尺度空间的自适应角点检测方法[J].计算技术与自动化, 2007,26(2):123.WANG Huaqin,TAN Guoxin,QIAN Xiaohong,et al.An Adaptive Corner Detector Based on Curvature Scale Space[J].Computing Technology and Automation,2007,26(2):123.(in Chinese)[18] 周丰,黄晓鸣.基于角序列的二维碎片轮廓匹配算法[J].科学技术与工程,2004,10(3):24ZHOU Feng,HUANG Xiaoming.Algorithm for 2D Contours Matching Based on Angle Sequence[J].Science Technology andEngineering,2004,10(3):24.(in Chinese)[19] 严蔚敏,吴伟民.数据结构(C语言版)[M].北京:清华大学出版社,1997. YAN Weimin,WU Weimin.Data Structure (C Language Version)[M].Beijing:Tsinghua University Press,1997.(in Chinese)【相关文献】[1] SHAN Ying,ZHANG Zhengyou.New Measurements and Corner-Guidance for Curve Matching with Probabilistic Relaxtion[J].International Journal of ComputerVision,2002,46(2):157.[2] AL-KHAIYAT M,KAMANGAR F.Planar Curve Representation andMatching[C]//Proceedings of the 9th British Machine VisionConference,Southampton,UK:British Machine Vision Association.1998,174.[3] GAMA H,STOLFI J.A Multiscale Technique for Computer Assisted Reassembly of Fragment Object[R].Technical Report IC-01-04,Institute of Computer,University of Campinas,Mar,2001,123.[4] 耿文欣.基于文字特征的文档碎片拼接复原研究[J].焦作大学学报,2014,4(2):93.GENG Wenxin.Research on the Restoration of Document Fragments Based on TextCharacteristics[J].Journal of Jiaozuo University,2014,4(2):93.(in Chinese)[5] 陈泽.基于文字特征的碎纸片拼接复原[J].学园, 2013(26):60.CHEN Ze.Restoration of Document Fragments Based on Text Characteristics[J].Xueyuan,2013(26):60.(in Chinese)[6] 尹玉萍,刘万军,张冲等.基于动态聚类的文档碎纸片自动拼接算法[J].计算机工程与应用,2014,50(18):162.YIN Yuping,LIU Wanjun,ZHANG Chong,et al.Automatic Documents Fragment Re-assembly Algorithm Based on Dynamic Clustering[J].Computer Engineering andApplications,2014,50(18):162.(in Chineses)[7] 罗智中.基于线段扫描的碎纸片边界检测算法研究[J].仪器仪表学报, 2011,32(2):289.LUO Zhizhong.Research on Edge Detection Algorithm for Scrapped Paper with Line Segment Scanning[J].Chinese Journal of Scientific Instrument,2011,32(2):289.(in Chinese) [8] 罗智中.基于文字特征的文档碎纸片半自动拼接[J].计算机工程与应用, 2012,48(5):207.LUO Zhizhong.Semi-auto Stitching of Scrapped Paper Based on Character Characteristic[J].Computer Engineering and Applications,2012,48(5):207.(in Chinese)[9] 鲁嘉琪.基于文字信息的碎纸片拼接复原算法[J].现代电子技术,2014,37(4):28.LU Jiaqi.Algorithm for Torn Paper Restoration Based on Character Information[J].Modern Electronics Technique,2014,37(4):28.(in Chinese)[10] 韩煜,葛庆平,刘真.纹理分析在计算机自动拼图中的应用[J].计算机工程与应用,2008,44(30):199. HAN Yu,GE Qingping,LIU Zhen.Application of Texture Analysis in Automatic Computer Puzzles[J].Computer Engineering andApplications,2008,44(30):199.(in Chinese)[11] 霍达.基于像素匹配的碎纸片拼接复原[J].吕梁学院学报, 2014,4(2):43HUO Da.Torn Paper Restoration Based on Pixel Matching[J].Journal of Lüliang University,2014,4(2):43.(in Chinese)[12] 刘军,周明全,耿国华,等.基于轮廓与断面匹配的秦俑碎片拼接方法[J].计算机工程,2014,40(1):181.LIU Jun,ZHOU Mingquan,GENG Guohua,et al.Fragments Splicing Method for Terra-cotta Figures of Qin Dynasty Based on Contours and Fracture Surfaces Matching[J].Computer Engineering,2014,40(1):181.(in Chinese)[13] 陈海峰,纪圣谋,叶桦,等.利用改进遗传算法实现图像特征点的匹配[J].南京大学学报(自然科学), 2000,36(2):171.CHEN Haifeng,JI Shengmou,YE Hua,et al.Image Token Correspondence Based on Genetic Algorithm[J].Journal of Nanjing University (Natural Sciences),2000,36(2):171.(in Chinese) [14] 王展,皇甫堪,万建伟,等.基于多尺度小波变换的二维图像角点检测技术[J].国防科技大学学报,1999,21(2):46.WANG Zhan,HUANGFU Kan,WAN Jianwei,et al.Multi-Scale Wavelet Based TwoDimensional Corner Detection[J].Journal of National University of Defense Technology,1999,21(2):46.(in Chinese)[15] 吕科,耿国华,周明全,等.基于傅里叶变换的三维轮廓线快速匹配算法[J].西北大学学报, 2003,33(2):1551.LU Ke,GENG Guohua,ZHOU Mingquan,et al.Rapid 3D Contour Matching Based on the Fourier Transform[J].Journal of Northwest University(Natural Science Edition),2003,33(2):1551.。
基于链码的二维碎片轮廓匹配算法_饶芮菱
收稿日期:2006-09-14作者简介:饶芮菱(1982—),女,四川巴中人,硕士研究生,研究方向:模式识别与智能系统(E -mail :raoruiling17@ )。
文章编号:1003-6199(2007)02-0034-04基于链码的二维碎片轮廓匹配算法饶芮菱,金雪峰,鲁怀伟(兰州交通大学数理与软件工程学院,甘肃兰州 730070)摘 要:首先利用边界链码的跟踪技术,提取出二维碎片的轮廓信息,同时对轮廓线进行细化、去噪和编码处理,得到二维轮廓线的一维链码信息描述,并在此基础上提出一种基于链码的二维碎片轮廓匹配方法。
将二维碎片的形状匹配变为只对一维字符的处理,从而使得二维碎片的拼合简单化。
实验表明该方法能够有效的找出一对复杂轮廓线上恰当的对应特征段,实现碎片物体的复原。
关键词:轮廓匹配;边界跟踪;链码;细化;去噪中图分类号:TP391 文献标识码:AA Method of Contour MatchingB ased on Chain CodeRAO Rui 2ling ,J IN Xue 2feng ,L U Huai 2wei(C ollege of Mathematics ,Physics and S oftware Engineering ,Lanzhou Jiaotong University ,Lanzhou 730070,China ) Abstract :In this paper ,a boundary chain -code tracing method is used to extract the contour information ,the process ofthinning ,de -noising ,and encoding for contour are realized at one time ,so a 1D string represented the 2D contour shape informa 2tion is obtained ,then a contour matching method based on chain -code is presented.The 2D fragments matching task is reduced into a 1D string matching problem so that the 2D fragments reassembling is simple.Experimental results show that the proposed method is efficient and accurate.K ey w ords :contour matching ;boundary tracing ;chain -code ;thinning ;de -noising1 引 言轮廓匹配是计算机视觉、图像分析和模式识别中的一个重要课题,国内外学者已经对二维轮廓曲线匹配和相似性问题从不同角度展开了研究。
二维碎片拼接的局部匹配
二维碎片拼接的局部匹配房然然;黄发忠;辛化梅【摘要】The 2⁃D irregular fragments reassembling issue based on contour is usually divided into two steps:local matching and global matching. A new local matching method based on improved Tank algorithm is proposed. Firstly the sequence of polygon vertices is obtained by polygonal approximation to the contour,then the corner sequence signature of the polygon is acquired, the distance between two adjacent vertices is calculated. The improved Tank algorithm is applied in the corner sequence to find some candidate matching information of the polygon vertices by some screening rules. The improved algorithm can reduce time complexity and improve matching efficiency.%基于轮廓的二维非规则碎片拼接问题,通常分为局部匹配和全局匹配两个步骤,这里提出一种新的局部匹配的方法,首先对轮廓进行多边形逼近得到多边形顶点序列,然后获取多边形顶点的转角序列特征并计算相邻顶点间长度,对该转角序列使用改进过的“坦克算法”,应用一定筛选规则,寻找到多边形顶点的若干候选匹配信息。
基于角序列的二维碎片轮廓匹配算法_周丰
第7卷 第15期 2007年8月167121819(2007)1523757204 科 学 技 术 与 工 程Science Technol ogy and Engineering Vol .7 No .15 Aug .2007 2007 Sci .Tech .Engng .基于角序列的二维碎片轮廓匹配算法周 丰 黄晓鸣3(北京交通大学理学院数学系,北京100044)摘 要 提出了一种基于角序列的二维碎片轮廓匹配算法,用于获得两块碎片间的最可能的拼接结果。
将该算法与多尺度空间相结合,不但有效地解决了碎片拼合过程中的尖角问题,还提高了计算效率及碎片匹配的准确率。
关键词 轮廓匹配 角度 多尺度中图法分类号TP391; 文献标识码 A2007年3月9日收到第一作者简介:周 丰(1982—),女,吉林人,硕士研究生,Email:finny007@s ohu .com 。
3通信作者简介:黄晓鸣(1962—),男,副教授,E mail:x mhuang@bjtu .edu .cn 。
碎片的自动拼合问题有很大的实用价值。
如,考古研究中对破碎珍贵文物的修复,公安机关破案时遇到的破碎证物的修复等。
碎片拼合就是从许多散乱的碎片中,借助于计算机,通过特征匹配技术来识别出相邻接的碎片,进而重现整个物体的原貌。
其中,特征匹配是拼合问题中最重要的一步。
根据特征又可以分为基于色彩、纹理、材质、轮廓等碎片拼合。
这里我们主要讨论了基于轮廓特征的碎片拼合。
对于碎片的轮廓匹配,国内外很多学者提出了大量的算法。
如,Leitao 等[1]探讨了多尺度技术在轮廓匹配方面的应用。
Kong 等[2]提出用轮廓线的近似多边形的配合情况来衡量碎片的匹配程度。
朱延娟等[3]提出基于Hausdorff 距离的多尺度轮廓匹配算法等。
这些算法都在一定程度上对轮廓进行了匹配,但是它们大多是采用轮廓曲线上点的曲率特征进行匹配,这就存在了尖角问题(本文称曲率无穷大点为尖角),一些尖角会因平滑受到破坏或者无法表示。
基于链码的二维碎片轮廓匹配算法
基于链码的二维碎片轮廓匹配算法
饶芮菱;金雪峰;鲁怀伟
【期刊名称】《计算技术与自动化》
【年(卷),期】2007(26)2
【摘要】首先利用边界链码的跟踪技术,提取出二维碎片的轮廓信息,同时对轮廓线进行细化、去噪和编码处理,得到二维轮廓线的一维链码信息描述,并在此基础上提出一种基于链码的二维碎片轮廓匹配方法.将二维碎片的形状匹配变为只对一维字符的处理,从而使得二维碎片的拼合简单化.实验表明该方法能够有效的找出一对复杂轮廓线上恰当的对应特征段,实现碎片物体的复原.
【总页数】4页(P34-37)
【作者】饶芮菱;金雪峰;鲁怀伟
【作者单位】兰州交通大学,数理与软件工程学院,甘肃,兰州,730070;兰州交通大学,数理与软件工程学院,甘肃,兰州,730070;兰州交通大学,数理与软件工程学院,甘肃,兰州,730070
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于轮廓特征与文字特征的二维碎片匹配 [J], 马元魁;牛浩时
2.基于曲率匹配的二维碎片匹配算法研究 [J], 周石林;廖文和
3.二维碎片轮廓曲线的匹配算法 [J], 刘爽;朱延娟;张丽艳
4.基于Freeman链码二维图像轮廓的提取与匹配 [J], 姚文君
5.基于角序列的二维碎片轮廓匹配算法 [J], 周丰;黄晓鸣
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Freeman链码的二维曲线匹配
基于Freeman链码的二维曲线匹配靳秋霞;张彩霞【期刊名称】《计算机应用》【年(卷),期】2015(000)0z1【摘要】快速地提取曲线的拐角点是进行曲线匹配的关键。
为了解决这一问题,提出提取拐角点的快速方法,根据Freeman链码在拐角点附近的变化规律,将Freeman链码分为两类,根据这两类的判断规律分别确定拐角点,然后根据特征线段的长度和特征点的曲率去除一些伪拐角点,以得到标准拐角点。
最后根据标准拐角点的曲率序列求得的归一化互相关系数进行粗匹配,再通过长序列的归一化互相关系数进行精确匹配。
这种方法不受曲线旋转和平移的影响,易于实现,根据实验证明该方法的合理性、有效性。
%It is one of the key issues of curve matching to extract corner points of 2D curves quickly and accurately. To solve this problem, a rapid method is proposed. Freeman code was divided into two categories based on the change of Freeman code near the corner point, then, two judgment criteria were used to determine corner points. Some false corner points were removed according to the lengths of the feature lines and the curvatures of the feature points to get the standard corner points. Finally, curves were matched together using the normalized cross correlation of the length and curvature. This method may be implemented easily and not affected by rotation and translation. The experiments show the rationality and effectiveness of this method.【总页数】5页(P247-251)【作者】靳秋霞;张彩霞【作者单位】北方工业大学模式识别与图像处理研究所,北京100144;北方工业大学模式识别与图像处理研究所,北京100144【正文语种】中文【中图分类】TP391.4【相关文献】1.基于多尺度Fourier描述符的二维轮廓曲线匹配 [J], 周术诚2.基于编辑距离的手写数字Freeman链码匹配算法 [J], 张凯兵3.基于Freeman链码二维图像轮廓的提取与匹配 [J], 姚文君4.Freeman链码描述的曲线匹配方法 [J], 余博;郭雷;赵天云;钱晓亮5.基于Freeman链码的B样条曲线轮廓拟合 [J], 吴桐树;张瑞林;邹敏因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(ol eo C lg fMahmai ,P yi n ot aeE gne n e te t s hs adS fw r n ier g,L nh uJatngUnvri c s c i a zo ioo4 iesy,Ln t ̄ 7 0 7 , hn ) t a z u 3 0 0 C ia z
维普资讯
第2 6卷 第 2期
计O. 2
2007年 6月
Co pu ig Te hn lgy a d Au o a in m tn c oo n t m to
好。
K n 【 等 提 出用轮廓 线 的 近似 多边 形 的配 合情 况 o gI I
来衡 量碎 片的匹 配程度 , 着 过多 的重复工 作。 有
L i o ’ 等 通过 选取 碎 片轮 廓 上 的离 散 点来 度 量 eaI3 t J 碎 片之 间 的可匹 配程度 , 有充分 利 用轮廓 线 的几 没
轮廓 曲线 的几 何信 息 , 基本达 到 了轮廓 自身 信息 无 丢失 的状 态 。在两 个碎 片轮廓 之 间 , 用该 方法 能 利 有效 的找 到两 条封 闭轮廓 线 的可 匹配特 征段 , 而 从 完成 轮廓 的快 速 匹 配 。该 方 法在 保 证 匹配 速度 的 同时 , 大大 提高 了匹 配 精度 , 碎 片 的拼 合效 果 良 且
J n.2 00 7 u
文 章 编 号 :0 3 19 20 }2 0 3 0 1 0 —6 9 f 0 7 0 0 4 4
基 于 链 码 的 二 维 碎 片 轮 廓 匹 配 算 法
饶 芮 菱 , 雪峰 ,鲁 怀伟 金
( 州 交 通 大 学 数 理 与 软 件 工 程 学 院 , 肃 兰州 7 0 7 兰 甘 3 00)
能 够 有 效 的 找 出一 对 复 杂 轮 廓 线 上 恰 当 的对 应 特 征 段 , 实现 碎 片 物 体 的 复 原 。
关 键 词 : 廓 匹配 ; 界 跟 踪 ; 码 ; 化 : 轮 边 链 细 去噪 中 图分 类 号 : P 9 T 31 文献标识码 : A
A e h d o nt u a c n s d o M t o fCo o r M t hi g Ba e n Cha n Co e i d
Ab ta t I hspa e , a b un a y c a n c de r cn m e h sus d O e ta tt e c n o r i o m ai n,t e p o e s o s r c : n t i p r o d r h i o ta ig t o i e t x r c h o t u nf r to d h r c s f t i i g, d hnn n e— n iig,a d e o n o o o ra er aie ton i e,S srn e r s ntd t e2D o t urs a e i o a osn n nc dig frc nt u r e l d a e tm z Oa1 D tig r p e e e h c n o h p nfr — m to so ane in i bti d, t e o o achn e h d b s d o han— c e i e e t d.T h D r g e t a c i g t s sr d e h n a c nturm t ig m t o a e n c i d o sprs n e e 2 fa m n sm t h n a k i e uc d i o a 1 srn a c n r blm h tt nt tig m t hig p o e S t a he2D rgm e t e se b ig i i pe. Exp rm e t lr s lss o t t t e p o os d D O fa n sr a s m ln ssm l e i n a e ut h w ha h r p e m e h se f inta c ur t . t o i fi e nd a c a e d c Ke r y wo ds:o o rm a c i g;b un r r cn c nt u t h n o da y ta i g;c an — c e;t i nig;de— n ii g hi d o hn n osn
法 , 出了具体 的实 现 步 骤 , 给 该方 法 能够 充 分 利 用
1 引 言
轮廓 匹配是 计算 机视 觉 、 图像分 析 和模式 识别 中 的一个重 要课 题 , 内外 学 者 已经 对 二维 轮廓 曲 国
线 匹 配 和 相 似 性 问题 从 不 同 角 度 展 开 了研 究 。
摘 要 : 先 利 用 边 界链 码 的 跟 踪 技 术 , 取 出二 维 碎 片 的轮 廓 信 息 , 时对 轮 廓 线 进 行 细 化 、 噪 和 首 提 同 去 编 码 处 理 , 到 二 维轮 廓 线 的 一 维链 码信 息 描 述 , 在 此 基 础 上 提 出一 种 基 于 链 码 的 二 维碎 片 轮 廓 匹配 方 得 并 法 。 将 二 维 碎 片 的 形 状 匹配 变为 只 对 一 维 字符 的 处理 , 而 使 得 二 维碎 片 的拼 合 简 单 化 。 实验 表 明 该 方 法 从