鼠笼条参数设置
三星鼠笼异步电动机设计报告
基于Ansoft Maxwell的三相鼠笼异步电机综合设计报告一、三相鼠笼异步电机设计方案算例(6)1.性能数据额定功率P N:15 kW;额定频率f N:50 Hz极数2p:6额定转速n N:977 r/min 堵转电流倍数:6.37空载励磁电流:7.97A 绝缘等级:F级工作制:连续(S1)额定电压U N:380V额定电流I N:17.71 A功率因数cosφ:0.828 ind 额定效率ηN:89.76 %堵转转矩倍数:2.38防护等级:IP542.定子数据定子铁心:定子铁心外径D1:290 mm;定子铁心内径D i1:205 mm;铁心长度l i:170 mm;气隙长度δ:0.45 mm;定子槽数z1:54;铁心材料:Steel1008 定子绕组:绕组型式:双层叠绕组,Δ接;绕组节距:1-9;并联支路数a1:3;定子每槽匝数N s1:38;直线部分伸出铁心长l d:15 mm;端部投影长f d:32.9 mm;绕组材料:漆包铜圆线定子采用梨形槽,如图所示:定子槽形尺寸:b01:3.50 mm;b11:6.05 mm;b21:8.37 mm;h01:0.80 mm;h1:16.11 mm;α1:30°3.转子数据转子铁心:转子铁心外径D2:204.1 mm;轴径D i2:70 mm;铁心长度l i:170 mm;转子槽数z2:44;斜槽:1个齿距;铁心材料:Steel1008;转子绕组:绕组型式:笼型绕组;端环气隙处直径D R:196 mm;端环高度b R:28 mm;端环长度l R:20 mm;绕组材料:铸铝;转子采用圆底平行槽,如图所示:转子槽形尺寸:b02:1.30 mm;b12:4.81 mm;b22:4.81 mm;h02:0.80 mm;h2:27.20 mm;α2:30°二、创建几何模型及设定材料属性1.定子铁心设置(设置窗口)截图(属性窗口)截图2.转子铁心设置(设置窗口)截图(属性窗口)截图3.定子绕组设置(设置窗口)截图4. 转子绕组设置(设置窗口)截图(属性窗口)截图5.边界条件设置(单击边界条件“Boundaries”,绘图窗口)截图(设置窗口)截图6.电机几何模型(模型窗口+绘图窗口)截图三、空载磁场仿真设置1.激励设置A相线圈为Current激励,其中电流值58.29A,(线圈)A1-1、A1-2方向为Positive,As1_1、As1-2方向为Negative。
基于Maxwell与Simplo...

基于Maxwell与Simplo...一、写在前面本文是笔者之前写给ANSYS 官方案例文档(精简版),文章比较长,请大家选择性观看。
对于那些已经报名且学完了我的线上课程《ANSYS Maxwell技能培训10讲,掌握Maxwell十大仿真分析能力》的200+位学员,请联系仿真小助手索要模型认真练习,遇到疑问,欢迎在VIP群交流。
二、前言本章以异步电机的启动计算为例,运用ANSYS19.0,先在RMxprt模块进行电机设计,并完成计算。
再利用RMxprt模块与二维和三维模块之间强大的无缝链接技术,将RMxprt中的电机模型一键导入到Maxwell 2D模块,在Maxwell 2D模块进行有限元分析计算。
最后在Simplorer中建立电路与Maxwell 2D中的电机模型进行场路耦合联合仿真,从而计算异步电机启动后突加负载时三相电流磁链等的变化情况。
三、设计目标异步电机是应用最为广泛的电机类型之一,广泛应用于冶金、煤炭、矿山、机械和油田等各个工业生产领域。
在本例中采用国标Y系列作为计算样机,先在RMxprt模块中建立基本样机模型,再送入Maxwell 2D模块进行有限元分析。
以一台55kW的三相异步电机为例,该电机的定子和转子铁芯轴长为255mm,铁芯材料采用热轧硅钢片D23。
定子绕组采用三相60度相带,线规为Φ1.4铜线,5股作为1匝,每槽22匝,双层绕组,节距为11。
通过本例的学习,希望读者能掌握电机在RMxprt中的建模计算、模型导入Maxwell 2D的方法以及与simplorer外电路进行场路耦合等。
读者可以尝试运用这些方法技巧建立其他电机模型进行计算分析,包括永磁无刷直流电机、永磁同步电机、磁阻电机。
四、操作步骤1、新建工程打开ANSYS仿真软件,找到Maxwell模块对应的图标,单击图标中的下三角,选择RMxprt模块,在弹出的电机类型选择窗口中选择“Three-Phase Induction Motor”,点击“OK”确定。
小鼠隔离饲养笼系统技术要求
参数7
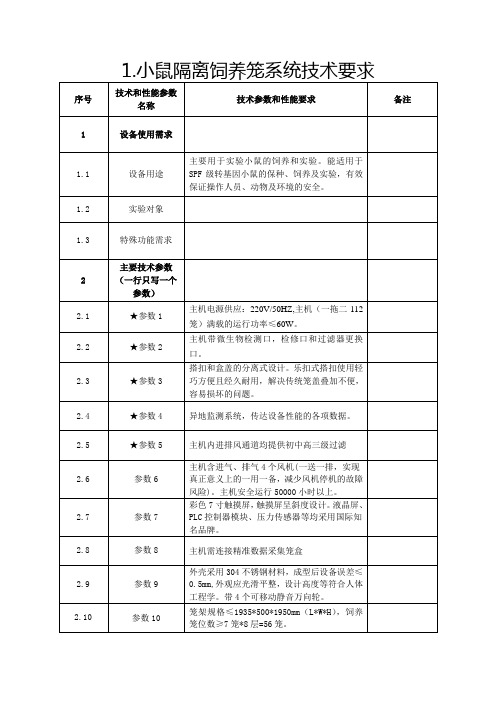
彩色7寸触摸屏,触摸屏呈斜度设计。液晶屏、PLC控制器模块、压力传感器等均采用国际知名品牌。
2.8
参数8
主机需连接精准数据采集笼盒
2.9
参数9
外壳采用304不锈钢材料,成型后设备误差≤0.5mm,外观应光滑平整,设计高度等符合人体工程学。带4个可移动静音万向轮。
2.10
参数10
笼架规格≤1935*500*1950mm(L*W*H),饲养笼位数≥7笼*8层=56笼。
2.2
★参数2
主机带微生物检测口,检修口和过滤器更换口。
2.3
★参数3
搭扣和盒盖的分离式设计。乐扣式搭扣使用轻巧方便且经久耐用,解决传统笼盖叠加不便,容易损坏的问题。
2.4
★参数4
异地监测系统,传达设备性能的各项数据。
2.5
★参数5
主机内进排风通道均提供初中高三级过滤
2.6
参数6
主机含进气、排气4个风机(一送一排,实现真正意义上的一用一备,减少风机停机的故障风险)。主机安全运行50000小时以上。
2.5
参数5
封闭注药,内部容量不低于120ml,浓度范围0-5%,精度小于±0.1%
2.6
参数6
颅骨钻可通过颅钻夹持器固定到脑立体定位仪,通过操作臂的上下移动进行微步进控制
2.7
参数7
配备大小鼠标准夹持器-对角式,广泛的用于注射针头或电极的夹持,夹持范围0.3mm-1.5mm
2.8
参数8
操作臂移动范围上下、左右、前后≥80mm
2.11
参数11
笼盒采用聚亚苯基砜(PPSU)材料一次成型,使用寿命大于5年。笼盒含笼盒、盒盖、不锈钢网盖、水瓶、塑料标示牌。
施耐德软启动参数设置
施耐德软启动参数设置
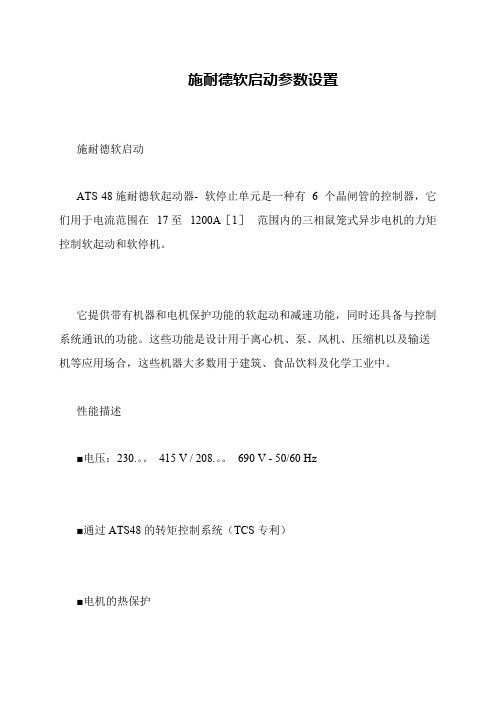
施耐德软启动
ATS 48施耐德软起动器- 软停止单元是一种有 6 个晶闸管的控制器,它们用于电流范围在17至1200A[1]范围内的三相鼠笼式异步电机的力矩控制软起动和软停机。
它提供带有机器和电机保护功能的软起动和减速功能,同时还具备与控制系统通讯的功能。
这些功能是设计用于离心机、泵、风机、压缩机以及输送机等应用场合,这些机器大多数用于建筑、食品饮料及化学工业中。
性能描述
■电压:230.。
415 V / 208.。
690 V - 50/60 Hz
■通过ATS48的转矩控制系统(TCS专利)
■电机的热保护。
三相鼠笼异步电动机

能调速,进一步提高能效。
智能化控制技术
传感器技术应用
利用传感器实时监测电机 的运行状态和参数,为控 制算法提供准确的数据支 持。
控制算法优化
研究和发展先进的控制算 法,如矢量控制、直接转 矩控制等,提高电机的动 态响应和稳态性能。
网络化与远程监控
实现电机与上位机的通讯, 通过远程监控和诊断系统, 实时监测电机的运行状态 和故障预警。
改变极对数调速
通过改变电动机定子绕组的极对数来改变同步转速,实现调速。
变频调速
01
变频器的工作原理
变频器通过改变电源的频率来改变电动机的转速,从而实现调速。
02
变频器的种类
按照工作原理可分为交-直-交变频器和交-交变频器,按照输出电压的
调制方式可分为脉冲宽度调制(PWM)和脉频调制(PFM)。
03
应用领域
工业领域
广泛应用于各种类型的 机械装置,如压缩机、 泵、风机、传送带等。
农业领域
建筑领域
其他领域
用于农业机械,如拖拉 机、灌溉设备等。
用于电梯、电动工具等。
如家电、办公设备等。
02
三相鼠笼异步电动机的 启动与调速
启动方式
01
02
03
直接启动
直接将电动机的定子绕组 接入额定电压的电源,是 最简单、最经济的启动方 式。
工作原理
三相鼠笼异步电动机利用三相交流电 产生旋转磁场,该磁场与转子中的电 流相互作用,使转子转动。转子中的 电流是由磁场旋转产生的感应电流。
结构与特点
结构
三相鼠笼异步电动机主要由定子 、转子和机座组成。定子包括铁 心和三相绕组,转子包括鼠笼导 条和两端环。
特点
结构简单、运行可靠、维护方便 、价格低廉、启动性能好、过载 能力强等。
起重机变频参数设置参考表
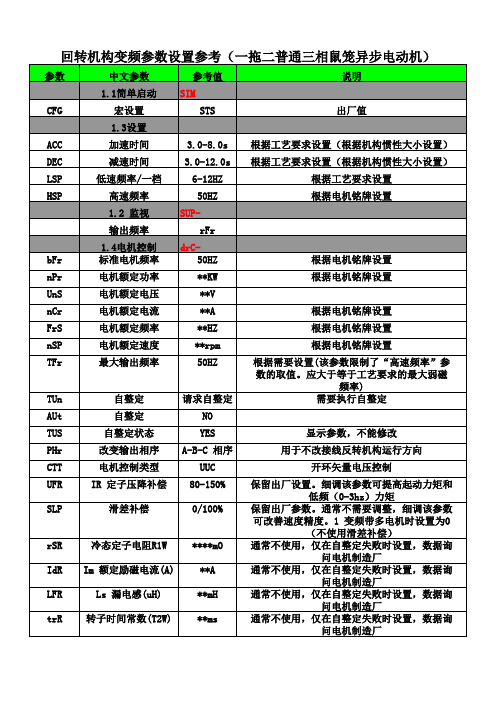
TUn AUt TUS PHr CTT UFR SLP
自整定 自整定 自整定状态 改变输出相序 电机控制类型 IR 定子压降补偿 滑差补偿
请求自整定 NO YES A-B-C 相序 UUC 80-150% 0/100%
rSR IdR LFR trR
冷态定子电阻R 冷态定子电阻R1W 额定励磁电流( Im 额定励磁电流(A) 漏电感(uH) Ls 漏电感(uH) 转子时间常数(T2W) 转子时间常数(
注入时间可调 第一静止直流注入电流的等级 第一静止直流注入时间 第二静止直流注入电流的等级 第二静止直流注入时间
预置速度2 预置速度2/二档 预置速度3 预置速度3/三档 预置速度5 预置速度5/四档 根据工艺要求设置 根据工艺要求设置 根据工艺要求设置 制动电阻过载时锁定
****mO **A **mH **ms
TCC TCT rrS R2
输入/ 1.5 输入/ 输出设置 I-O2/3 线控制 2 线控制 2 线控制 反转 继电器 R2分配 LI*延时 LI* 1.6 命令 0/1 电平 Lห้องสมุดไป่ตู้2 bLC 20ms 保留出厂设置 FUN斜坡停车 有 0.7In 2s 0.5In 1s √ LI3 LI4 LI5 25HZ 35HZ 50HZ FLTFLT 8KW 14Ω L16
通常用2 通常用2 线控制 通常采用0 通常采用0/1 电平控制
LI1-LI6/LI*d
设置为20ms 可减少干扰 设置为20ms 20
Stt Adc sdc1 tdc1 sdc2 tdc2 PSS PS2 PS4 PS8 SP2 SP3 SP5 bro brp bru rst
1.7 应用功能 停车类型 自动直流注入 自动直流注入电流1 自动直流注入电流1 自动直流注入时间1 自动直流注入时间1 自动直流注入电流2 自动直流注入电流2 自动直流注入时间2 自动直流注入时间2 预设速度 2个预置速度 4个预置速度 8个预置速度 预置速度2 预置速度2/二档 预置速度3 预置速度3/三档 预置速度5 预置速度5/四档 1.8 故障管理 制动电阻过载保护 制动电阻功率 制动电阻阻值 故障复位
鼠笼式弹性支承的柔度计算及影响因素分析

收稿日期:2021-07-08基金项目:航空动力基础研究项目资助作者简介:白孝栋(1994),男,硕士,工程师。
引用格式:白孝栋,蔚夺魁,冯国全.鼠笼式弹性支承的柔度计算及影响因素分析[J].航空发动机,2023,49(5):149-154.BAI Xiaodong ,YU Duokui ,FENG Guoquan.Flexibility calculation and influencing factors analysis of squirrel-cage elastic support[J].Aeroengine ,2023,49(5):149-154.第49卷第5期2023年10月Vol.49No.5Oct.2023航空发动机Aeroengine鼠笼式弹性支承的柔度计算及影响因素分析白孝栋,蔚夺魁,冯国全(中国航发沈阳发动机研究所,沈阳110015)摘要:鼠笼式弹性支承常用于现代航空发动机调整临界转速以实现振动抑制。
针对理论公式在工程应用中预测柔度较小的鼠笼式弹性支承的柔度时存在一定误差的问题,基于有限元法进行了鼠笼式弹性支承柔度数值计算。
讨论了弹支数值仿真计算边界条件的合理性,分析了笼条根部倒圆、非笼条鼓筒及工艺简化导致笼条截面形状改变等因素对鼠笼式弹性支承柔度的影响;将非笼条局部增大刚度模型的仿真计算结果与理论公式计算结果进行了对比,以验证有限元数值计算的可靠性。
结果表明:由非笼条局部增大刚度模型得到的数值仿真计算结果与理论公式得到的理论解吻合很好;理论公式未考虑的非笼条鼓筒部分、笼条根部倒圆等因素对柔度预测有一定的影响。
采用有限元数值仿真方法进行弹支结构的柔度设计,可以克服理论解析方法无法考虑倒角等结构细节特征影响的局限性,从而获得更逼近真实条件的鼠笼式弹性支撑结构设计方案。
关键词:鼠笼式弹性支承;支承柔度;整机振动;航空发动机中图分类号:V231.91文献标识码:Adoi :10.13477/ki.aeroengine.2023.05.020Flexibility Calculation and Influencing Factors Analysis of Squirrel-cage Elastic SupportBAI Xiao-dong ,YU Duo-kui ,FENG Guo-quan(AECC Shenyang Engine Research Institute ,Shenyang 110015,China )Abstract :The squirrel-cage elastic support is often used in modern aeroengines to adjust the critical speed and suppress vibration.In view of the fact that significant error exists in using the theoretical formula to predict the flexibility of the squirrel-cage elastic support with lower flexibility in engineering applications ,numerical calculation of the flexibility of the squirrel-cage elastic support was conductedbased on the finite element method.The rationality of the boundary conditions for the numerical simulation of the elastic support was dis⁃cussed ,and the influencing factors on the flexibility of the squirrel cage elastic support ,such as the cage bar root fillet ,the non-cage bar drum ,and the change of the cross-sectional shape of the cage bar due to process simplification ,were analyzed.In order to verify the accu⁃racy of finite element numerical calculation ,the simulation results of the local stiffness increase of the non-cage bars were compared with the results of the theoretical formula.The results show that the numerical simulation results obtained by the non-cage bar local stiffness in⁃crease model are in good agreement with the theoretical solution obtained by the theoretical formula.Factors such as the non-cage bar drum part ,the cage bar root fillet ,etc.are not considered by the theoretical formula ,so the flexibility prediction results are affected.Itshould be emphasized that the use of the finite element numerical simulation method for the flexibility design of the elastic support struc⁃ture can overcome the limitation of the theoretical analysis method which ignores the influence of the structural details such as chamfers ,so as to obtain a more realistic design of the squirrel-cage elastic support structures.Key words :squirrel-cage elastic support ;support flexibility ;engine vibration ;aeroengine0引言鼠笼式弹性支承常用于日益趋于柔性化的现代航空发动机和燃气轮机,以实现调整临界转速和振动抑制[1]。
TeslaMultiSCADA(中文版用户手册)V1.8

KOC200系列电机软起动器说明书

KOC200系列电机软起动器深圳市科创力源电子有限公司SHENZHEN KCLY ELECTRIC CO., LTD.地址:深圳市龙岗区上雪科技工业城东区8号A栋5楼电话:0755-********传真:0755-********网址:邮箱:info@.cn深圳市科创力源电子有限公司KOC200系列软起动说明书前言前言感谢您选用本公司的智能化电机软启动器产品,该产品用于三相鼠笼式异步电动机软起、软停控制,在使用前请仔细阅读和理解本说明书中的内容。
在本软启动产品的安装、使用、维护过程中必须注意以下事项:安装前请务必详细阅读本操作说明。
必须由专业技术人员安装本软启动器。
必须让电动机的规格与本软启动器相匹配。
严禁在软启动器输出端(U.V.W) 接电容器。
安装后裸露的接线端子必须用绝缘胶带包好。
软启动器或相关的其他设备应可靠接地。
设备维修时必须切断输入电源。
不得私自拆卸、改装、维修本产品。
本使用说明书中内容可能会因技术原因随时变更或修改。
我们保留更改的权力。
目录KOC200系列软起动说明书目录第1章KOC200系列电机软启动器 (1)1.1软启动器概况 (1)1.2软启动器的主要作用 (1)1.3软启动器的主要特点 (1)1.4软启动器的主要技术参数 (2)第2章产品型号说明与开箱检查 (3)第3章使用条件与安装要求 (4)3.1软启动器的使用条件 (4)3.2软启动器的安装要求 (4)3.3软启动器的外形与安装尺寸 (5)3.4软启动器的安装实图 (6)第4章外接端子与通信接口说明 (8)4.1软启动器外接端子说明 (8)4.2软启动器主回路接线简图 (9)4.3软启动器通讯接口与说明 (10)第5章控制面板与操作 (11)5.1键盘操作方法 (11)5.2参数设置与说明 (12)5.3可编程继电输出功能 (14)5.4其它设置项说明 (15)5.5帮助信息及说明 (15)5.6成套厂家出厂或用户调试方案 (16)第6章保护功能及说明 (17)6.1保护功能及其参数 (17)6.2保护级别设定说明 (17)第7章试运行与应用 (19)7.1通电试运行 (19)7.2起动模式及应用 (20)7.3停机模式及应用 (23)7.4特殊应用 (23)7.5应用举例 (24)附录 (25)保修协议 (29)KOC200系列软起动说明书第1章KOC200电机软启动器第1章KOC200系列电机软启动器1.1软启动器概况电机软启动器概况:智能化数字式电机软启动器,采用智能化数字式控制;以单片机为智能中心,可控硅模块为执行元件对电动机进行全自动控制。
「三相鼠笼式异步电动机设计实例」
「三相鼠笼式异步电动机设计实例」鼠笼式异步电动机是一种常见的三相感应电动机,由于其结构简单、耐久可靠、成本较低等特点,在工业领域得到了广泛应用。
本文将以三相鼠笼式异步电动机的设计实例为主题,详细介绍其设计原理和步骤。
首先,我们需要确定设计的目标和参数。
假设我们要设计一台额定功率为20kW、三相380V、50Hz的鼠笼式异步电动机。
根据这些参数,我们可以开始设计。
第一步是确定定子绕组的电气参数。
根据所给的电压和功率,可以计算出对应的电流值。
假设我们要求电流密度为6 A/mm²,根据功率和电压得到额定电流值为40 A,根据定子槽数的设计要求,可以计算出定子绕组的导体截面积。
第二步是计算定子槽数和转子槽数。
一般来说,定子槽数和转子槽数的比值在2.5~3之间。
根据这个比值,我们可以计算出定子和转子的槽数。
第三步是确定空载电流和满载电流的比值。
一般来说,空载电流和满载电流的比值范围为1.4~1.8、根据给定的功率和额定电流值,可以计算出空载电流和满载电流。
第四步是确定磁链密度和定子绕组的电磁参数。
磁链密度是电机设计中的一个重要参数,它会影响电机的输出功率、效率和性能。
根据给定的功率和电压,可以计算出磁链密度。
然后,根据导体截面积和定子槽数,可以计算出定子绕组的电阻、电感和导纳。
第五步是确定转子电阻和转子槽数。
转子电阻是电机设计中的另一个重要参数,它会影响电机的起动性能和负载特性。
根据给定的功率和电压,可以计算出转子电阻。
然后,根据转子电阻和转子槽数,可以计算出转子的电感和电纳。
第六步是根据电磁参数,计算出电机的等效电路参数。
这些参数包括定子和转子的电阻、电感和导纳。
通过电机的等效电路参数可以进行电机的性能分析和计算。
第七步是进行电机的磁路设计。
根据所给的电压和功率,可以计算出磁路的长度、磁链密度和磁通。
根据磁路的长度和磁链密度,可以确定磁路的尺寸和磁通。
第八步是进行电机的槽设计。
根据定子和转子的槽数,可以确定槽的尺寸和形状。
三相鼠笼式异步电动机设计讲解
三、本课题研究内容:中小型三相感应电动机电磁计算程序是根据技术条件或技术任务书(技术建议书)的规定,参照生产实践经验,通过计算和方案比较,来确定与所设计电机电磁性能有关的尺寸和数据,选定有关材料,并核算其电磁性能。
其主要内容包括以下四个步骤,分别是:a)额定数据及主要尺寸的计算;b)磁路计算;c)参数计算;d)起动计算。
四、本课题研究方案:在核算原方案的基础上,进一步设计三个方案,其中多个方案亦有不同的要求,从而找出最佳方案:方案一:节省材料,将铁芯缩短5毫米,尽量减少定子绕组用铜量、用硅铜量、用铁量和转自绕组用铝量。
方案二:提高性能,提高效率、减少起动电流、增大起动转矩和最大转矩。
方案三:既节省又提高性能。
目录摘要........................................... 错误!未定义书签。
ABSTRACT .......................................... 错误!未定义书签。
绪论........................................... 错误!未定义书签。
第1章异步电机概念............................... 错误!未定义书签。
1.1异步电机的类型、特点和用途................... 错误!未定义书签。
1.2异步电机的发展趋势........................... 错误!未定义书签。
第2章三相异步电动机的基本结构和工作原理.. (1)2.1三相异步电动机的基本结构 (1)2.2三相异步电动机的铭牌数据与主要系列 (2)2.3三相异步电动机的工作原理 (4)2.4三相异步电动机的机械特性和工作特性 (5)第3章电机设计基本理论 (6)3.1电机制造与设计的概况 (6)3.2电磁设计 (6)第4章毕业设计手算程序及优化方案 (9)4.1手算程序 (9)4.2优化方案 (28)结论 (32)参考文献 (33)附录I.CAD图 (35)第2章三相异步电动机的基本结构和工作原理2.1 三相异步电动机的基本结构三相异步电动机主要是由定子和转子两大部分组成,转子有鼠笼型及绕线型转子两种。
Maxwell与Simplorer联合仿真方法及注意问题(特选借鉴)

三相鼠笼式异步电动机的协同仿真模型实验分析
本文所采用的电机是参照《Ansoft 12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。
由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。
1.1 Maxwell与Simplorer联合仿真的设置
1.1.1Maxwell端的设置
在Maxwell 2D模型中进行一下几步设置:
第一步,设置Maxwell和Simplorer端口连接功能。
右键单击Model项,选择Set Symmetry Multiplier项,如图1.1所示,单击后弹出图1.2的对话框。
图1.1 查找过程示意图
图1.2 设计设置对话框
在对话框中,选择Advanced Product Coupling项,勾选其下的Enable tr-tr link with Sim 。
至此,完成第一步操作。
第二步,2D模型的激励源设置。
单击Excitation项的加号,显示Phase A、Phase B、Phase C各项。
双击Phase A项,弹出如图1.3所示的对话框。
图1.3 A相激励源设置。
电脑鼠使用说明

电脑鼠使用说明1界面简介:2传感和运动控制模块说明:功能:初始化电脑鼠硬件,以及清零电脑鼠的记忆内存。
参数:双击设置四个参数,分别为初始X坐标、初始Y坐标、初始方向、迷宫大小。
相应地一般设置为0、0、MazeUP、8。
功能:电脑鼠待机,静止不动。
参数:时间(毫秒),默认值是100。
功能:电脑鼠搜索前进、不断检测周围迷宫信息。
参数:前进格数、速度、显示数据、遇到岔路是否停止,前进格数一般设置为迷宫边长的一半、速度值一般设置为100步/秒、显示数据就是现实墙壁的信息、一般情况下设置遇到岔路停止。
功能:电脑鼠转弯。
参数:转向、速度,转向分为四个方向,也可以设置为变量,速度一般设置为50。
功能:获取电脑鼠当下在迷宫中的位置信息及运行方向。
参数:自动获取功能:获取单元地图的墙壁信息。
选择地图获取方式:单元地图的存储值,单元的某一方向是否存在墙壁,单元是否已被搜索过。
需要输入的量为单元X和Y坐标,墙壁方向。
参数:X、Y坐标、墙壁方向值,X、Y坐标都是根据相应的函数GetMouseCoorX()和GetMouseCoorY()自动获取的,墙壁方向值就是想要获取的墙壁方向。
功能:获取输入的按键ID。
参数:按键从1到4。
功能:提供三种数据显示方式:显示电脑鼠和迷宫的信息(坐标,方向,单元地图);显示红外传感器和电压数据(调试用);在1~4位上显示自定义的信息(十六进制00~FF)。
参数:基本上是测试、调试、研究、创新的时候才用。
功能:选择相对方向和绝对方向之间的转换方式,需要输入要转换的方向和电脑鼠当前的运动方向。
参数:输入要转换的方向,可以选择变量,然后通过函数GetMouseDir()自动获取当前运行方向,最后赋值到相应的变量里面。
功能:通过对传感器数据进行标定来调整电脑鼠在迷宫中的运动控制。
每一个标定组所对应的参数调整请参照说明书的详细介绍参数:四个选项对应相应的标定项目。
3迷宫简介:迷宫是由18cm×18cm的方格组成,其行列各有8个方格。
适用于API 541标准的鼠笼式感应电动机的参数选择

适用于API 541标准的鼠笼式感应电动机的参数选择摘要API 541为375kW(500HP)以上等级的电动机的通用规范。
API 541内分别介绍了在IEC及NEC两套规范体系内电动机的制造标准及参数选择。
本文针对在NEC标准下,简述电动机各项参数及附件类别的选择,常规测试的方法及相关要求。
关键词鼠笼式感应电动机、绕组、轴承、绝缘系统、测温元件1、概述在国民生产生活中,电动机是将电能转化为各种机械能的主要设备,电动机广泛的应用于工业,商业,民用等诸多领域。
大到三峡大坝,小到风扇马达,电动机作为各种设备的驱动动力,其稳定性,方便性,可靠性,牢固性就显得尤为重要。
尤其近年来随着我国经济的高速发展,大型电动机越来越多的被应用于石油化工,电力等行业。
如何选择电动机的各项参数,使其合理的应用于生产中,不仅关系到能源的经济合理利用,更直接关乎到生产人员的人身安全。
本文针对应用在石油、化工及其他工业领域、适用于API 541标准的电动机从电气参数的选择,机械参数的选择,各种附件的选择及测试、试验内容等方面进行简要的介绍。
2、电动机的分类电动机按照工作电源主要分为:交流电动机与直流电动机。
直流电动机按结构及工作原理可分为:无刷直流电动机和有刷直流电动机。
交流电动机可分为:交流三相电动机和交流单相电动机。
电动机按照结构和工作原理可划分为:直流电动机、异步电动机、同步电动机。
同步电动机可划分为:永磁同步电动机,磁阻同步电动机和磁滞同步电动机。
异步电动机可划分为:感应电动机和交流换向器电动机。
其中感应电动机又可划分为:三相异步电动机、单相异步电动机和罩极异步电动机。
按照用途可划分为:驱动用电动机和控制用电动机。
驱动式电动机包括电动工具用电动机,家电用电动机,通用型机械设备用电动机等。
控制用电动机可划分为:步进电动机和伺服电动机等。
按照转子的结构可划分为:笼型感应电动机,绕线转子感应电动机。
3、适用于API 541标准的电动机类型API 541标准适用于:应用于石油,化工及其他工业领域,375kW(500HP)及以上具有特殊用途的鼠笼式感应电动机。
变频器控制鼠笼电的使用方法及参数
变频器控制鼠笼电的使用方法及参数变频器是一种电力控制设备,用于控制交流电机的转速和运行。
它通过改变电源电压和频率,实现对电机的精确控制,从而适应不同工况下的运行要求。
而鼠笼电机是一种常见的交流电机类型,它结构简单、使用可靠,广泛应用于各个领域。
1.安装正确:首先要确保变频器和鼠笼电机的正确安装。
根据厂家提供的安装说明,将变频器和电机正确地接线,并固定在合适的位置上。
2.参数设置:使用变频器前,需要根据实际应用需求进行参数设置。
主要包括:-电机额定电压和频率:设置电机的额定电压和额定频率,保证变频器输出的电压和频率符合电机的要求。
-起动和停止方式:设置变频器的起动和停止方式,可以选择自动或手动控制方式。
-转速控制:设置变频器的转速范围和控制方式,可以选择定速控制、跟随控制、开环控制等方式。
-保护功能:设置变频器的保护功能,包括过载、短路、过温等保护功能,以确保鼠笼电机的安全运行。
3.运行控制:设置好参数后,可以通过变频器的控制面板或远程控制器进行运行控制。
可以实现启停、设定转速、切换运行模式等操作。
4.监测和维护:在鼠笼电机运行过程中,通过变频器可以实时监测电机的运行状态,如电流、频率、转速等,以及变频器本身的工作状态。
定期进行维护维修,保持设备安全可靠的运行。
1.额定功率:指鼠笼电机在额定转速和额定电压下的输出功率,单位为千瓦(kW),一般为固定值。
2.额定电流:指鼠笼电机在额定转速和额定电压下的输出电流,单位为安培(A),通常为固定值。
3.额定频率:指鼠笼电机在额定转速下的供电频率,单位为赫兹(Hz),通常为50Hz或60Hz。
4.额定电压:指鼠笼电机在额定转速下的供电电压,单位为伏特(V),通常为220V、380V等。
5.最大转速:指鼠笼电机在变频器控制下可达到的最大转速,可以根据运行需求进行调整。
6.转矩控制方式:包括定转矩、跟随矩控制等,用于调节鼠笼电机的负载特性,以适应不同负载需求。
7.起动方式:包括定频起动、减压起动、电流限制起动等,用于实现鼠笼电机的起动控制。
基于Maxwell的感应电机涡流场分析实例
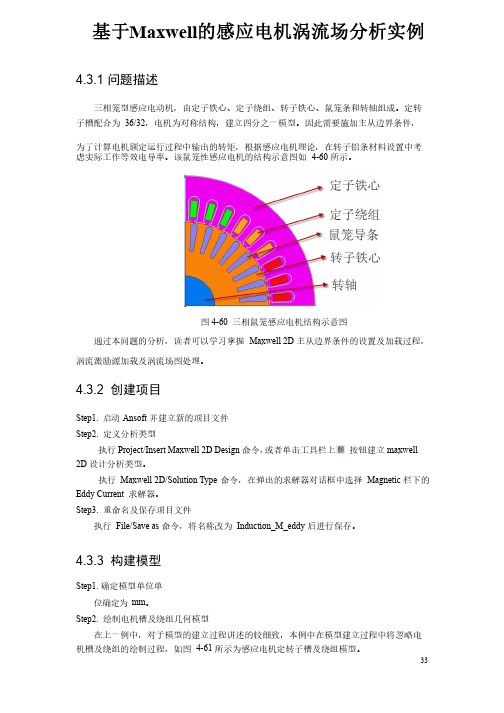
基于Maxwell 的感应电机涡流场分析实例4.3.1 问题描述三相笼型感应电动机,由定子铁心、定子绕组、转子铁心、鼠笼条和转轴组成。
定转子槽配合为子槽配合为 36/32,电机为对称结构,建立四分之一模型。
因此需要施加主从边界条件,,电机为对称结构,建立四分之一模型。
因此需要施加主从边界条件, 为了计算电机额定运行过程中输出的转矩,根据感应电机理论,在转子铝条材料设置中考虑实际工作等效电导率。
该鼠笼性感应电机的结构示意图如虑实际工作等效电导率。
该鼠笼性感应电机的结构示意图如 4-60 所示。
所示。
图 4-60 三相鼠笼感应电机结构示意图三相鼠笼感应电机结构示意图通过本问题的分析,读者可以学习掌握通过本问题的分析,读者可以学习掌握 Maxwell 2D 主从边界条件的设置及加载过程,主从边界条件的设置及加载过程, 涡流激励源加载及涡流场图处理。
涡流激励源加载及涡流场图处理。
4.3.2 创建项目Step1. 启动启动 Ansoft 并建立新的项目文件并建立新的项目文件 Step2. 定义分析类型定义分析类型执行执行 Project/Insert Maxwell 2D Design命令,或者单击工具栏上 按钮建立按钮建立maxwell 2D 设计分析类型。
设计分析类型。
执行执行 Maxwell 2D/Solution Type 命令,在弹出的求解器对话框中选择命令,在弹出的求解器对话框中选择 Magnetic 栏下的栏下的 Eddy Current 求解器。
求解器。
Step3. 重命名及保存项目文件重命名及保存项目文件执行执行 File/Save as 命令,将名称改为命令,将名称改为 Induction_M_eddy 后进行保存。
后进行保存。
4.3.3 构建模型Step1. 确定模型单位单位确定为位确定为mm 。
Step2. 绘制电机槽及绕组几何模型绘制电机槽及绕组几何模型在上一例中,对于模型的建立过程讲述的较细致,本例中在模型建立过程中将忽略电机槽及绕组的绘制过程,如图机槽及绕组的绘制过程,如图 4-61 所示为感应电机定转子槽及绕组模型。
简谈绣眼的笼具设置
简谈绣眼的笼具设置
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
下面谈谈绣眼的笼具设置,以避免灌水的嫌疑。
1、绣眼笼的规格基本一致。
多少笼条倒没有仔细察看过。
不过,从笼框的第一根笼丝查到第6根。
在6上放杠子。
另一侧也一样。
中间有5根笼丝,我记得是这样的。
忽略笼框的丝和放杠子的丝。
边上各四4个笼丝。
有4加5等于9。
以体现长久之意。
2、鸟有下底的习惯。
最好是拉底线。
5根底线还不行,全部拉上。
密不透风。
也可以做2个小跳棍。
在下一排安装上。
放在从框开始的第2根上。
紧紧挨着即可。
鸟也会没事跳到上面呆会的。
可以减少下底次数。
3、溜鸟最好加内置的玻璃眼饮水器。
由于笼罩的需要。
外置的饮水器会使笼布鼓起来,不美观。
不上讲究。
4、专门的绣眼笼底部一侧有擦板口。
这个口,有的带三个连接丝。
这个需要回家后,自己用小刀锯断,磨光,上胶的。
之后就好清理卫生了。
5、板子最好有一个小突出。
如此可以使清理的时候,好拿出来。
可以捏住。
动物饲养IVC系统使用流程及注意事项
动物饲养IVC系统使用说明2012年7月14日一、IVC系统简介IVC系统是由几十个至上百个可独立换气的密闭透明塑料笼盒,放置在不锈钢通风换气管架上,联接可控制的专用空气净化柜所组成的一套设备。
单个笼盒内保证了空气洁净度、换气量、标准风速、温、湿度等一系列要求。
实验鼠分组饲养在各个笼盒内,与外界完全隔离,并且各笼盒间也不会交互感染。
一套IVC设备就是一架组合式的微型屏障系统,并且其性能和经济上的优越性大大高于屏障系统。
二、本实验室IVC系统实验室IVC系统包括两台主机以及90个大鼠饲养笼位和196个小鼠饲养笼位和相应的饲养笼,以及报警器组成。
就本实验室情况说明此设备的维护使用流程。
主机在使用过程中关注当前温度、当前湿度、笼内压差及换气次数四个指标,还有进风功率和出风功率两个参数。
如下图所示:(1)单前温度指空气进入系统时的温度,笼内的温度一般比当前温度高出1~2℃;大小鼠的适宜饲养温度为18~29℃,最好控制在18~22℃。
要保持温度的相对稳定,日温差不差过3℃。
实验室的温度主要由空调控制,可以根据实际的要求调节饲养室温度。
(2)单前湿度指空气进入系统时的湿度,笼内的湿度一般会比当前湿度高5~10%,大小鼠的适宜饲养湿度为40~70%,最好控制在50~60%,同样要求湿度相对稳定。
(3)笼内压差指笼内外的的压力的差值,最好保持在30~70之间,进风功率和出风功率可以调节压差和换气次数大小。
(4)换气次数指每小时笼内外换气的次数,资料上一般是10~20次/小时,我们的调不出来这么低是换气次数,就以现在的小鼠约50次/小时和大鼠的约80次/小时运行系统。
进风功率和出风功率可以调节压差和换气次数大小。
.(5)报警器是在主机四个指标中的指标低于最低值时回向设定的电话号码发出事故警报。
如下图所示:A:报警器连接在IVC系统后面,打开电源开关,便会出现解防指示灯亮,等待5秒左右入网指示灯也会亮,这时即使出现压差过低也不会发出警报,用配套钥匙可以调节设防按钮设置为设防状态。