直流电机驱动模块初步设计
详解直流电机驱动电路设计

详解直流电机驱动电路设计
直流电机驱动电路设计概述
电机驱动电路是控制电机运行的电路,也称作动力源电路,它的主要
作用是提供电机所需要的适当电压和频率的电能,以控制电机的转速和转
动方向。
一般讲,电机驱动电路包括三个部分:驱动器,控制器和电源电路。
一、直流电机驱动电路的设计
1、驱动器的设计
直流电机驱动电路主要由驱动器、控制器和电源电路组成。
在这里,
驱动器主要负责将控制器的控制信号转换为适合电机工作的电流。
现在,
基于IGBT的驱动器已经成为直流电机驱动电路中的主要组成部分。
驱动
器电路很复杂,包括用于驱动电机的晶体管,用于传输控制信号的晶体管,以及调节电流的电阻等。
2、控制器的设计
控制器是电机驱动电路的核心部分,它负责接收外部输入信号,并根
据设定的参数来调整电机的转速、转向和加速等。
控制器设计非常复杂,
一般包括两个主要部分:控制电路和放大路由部分。
控制电路负责检测电
机的运行状态和外部输入,并根据这些信息来调整电机的转速。
放大部分
负责将控制电路的输出信号放大,并将其转换为能够驱动电机的标准控制
信号。
3、电源电路的设计。
简析直流有刷电机的驱动设计
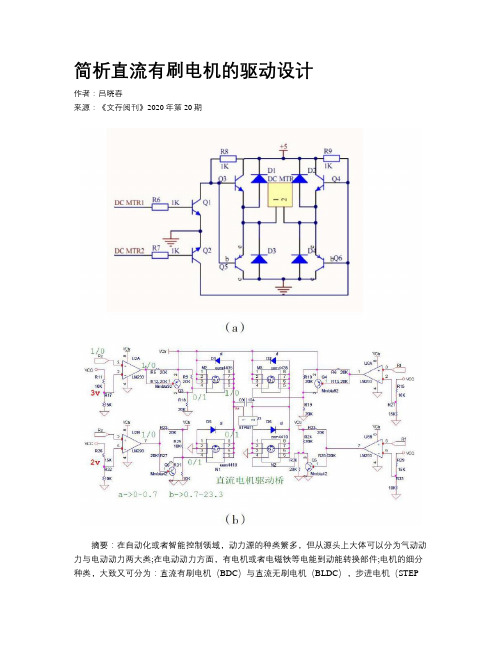
简析直流有刷电机的驱动设计作者:吕晓春来源:《文存阅刊》2020年第20期摘要:在自动化或者智能控制领域,动力源的种类繁多,但从源头上大体可以分为气动动力与电动动力两大类;在电动动力方面,有电机或者电磁铁等电能到动能转换部件;电机的细分种类,大致又可分为:直流有刷电机(BDC)与直流无刷电机(BLDC),步进电机(STEPMOTOR);伺服电机(SERVO MOTOR),与交流电机(AC MOTOR)。
有刷直流电机虽然有结构与可靠性上的一些缺点,但是有刷直流电机价格在性价比上,即满足必要的性能,相对合适的成本,有刷电机依旧是一个很好的选择;直流有刷电机的驱动看似简单,但实际有很多问题,主要在于:电机启动、停止、换向时容易损坏驱动器,在启动停止换向瞬间的冲击电流比正常工作电流大十倍以上;这就要求驱动器的负载能力与各种保护措施都要求强壮才能保证驱动器可靠。
关键词:直流电机;驱动器;电机驱动器;通用驱动器1.直流有刷电机驱动器的设计概述方案1,使用继电器实现电机驱动、或者换向和制动;这种方式由于继电器开合次数寿命非常有限,在开合时触点上产生电弧,以及在电流较大时触点接触电阻导致触点发热,导致触点加速氧化导致接触不良,这种方案用在课堂教学中问题不大,但如果频繁换向或者制动的工业应用场合,继电器就很容易损坏,这种方案就不是一个可靠方案。
方案2,驱动器使用半导体功率器件来实现全桥,如下图所示:这种控制方式,在启动或者负载电流较大时,功率器件进入完全导通或者完全关断的状态是有一个过程的,功率器件处于半导通的状态的过程,在功率器件上的压降大,而导致功率器件发热严重;另外这种方案还有上下桥臂的功率管直通的过程出现,虽然在整个控制启停过程中可能直通过程很短暂,但即便短暂也很有可能直接就导致烧毁;方案3,基于MOS管的H桥。
这种类型的驱动电路有很多的经典电路,甚至都有很多现成H桥集成电路芯片可选,比如MC33HB2000等,举例的这个芯片负载电流可以到3A,峰值电流能到16A,电机工作电压可以高达28V;集成过热保护,短路保护,可以说能满足很大部分中小额定电流的直流电机驱动的应用场合;但这种方案也不是本设计要讨论的重点,因为RdsOn的典型值为235mOhm,这个值还是有点偏大;在可靠性要求比较苛刻的工业控制环境下,对于需要频繁启动停止与换向的应用场合,发热还是偏大,这个可靠性无法保证;另外如果需要驱动的直流电机的额定电流接近3A甚至是超过3A,设计出的驱动器额定功率与负载功率接近,功率余量不足,甚至不够,这个场合就不能采用这个芯片方案;基于MOS管的非集成芯片的H桥驱动方案,更普遍地应用到直流电机的驱动方案中,而基于MOS 管的H桥分立驱动方案有两大类:A方案,上下桥臂都使用NMOS管,上桥臂通过一个电荷泵升电路控制通断; B方案,上桥臂采用PMOS管,下桥臂采用NMOS管;在A方案的设计中,可以考虑采用IR2104S半橋驱动器去驱动H桥功率电路,该芯片厂商也提供了经典的设计方案;A方案的最大问题是怎么确保上下桥臂不出现桥臂直通现象;功率管开关通断时,会产生比较大的电源振铃波动,这个波动会影响IR2104S的驱动波形,这个方案对供电的电源要求相对较高;为规避上述这些方案的问题,在当前芯片制造工艺下PMOS造价与导通电阻都与NMOS接近情况下,采用B方案的是本方案设计的讨论重点。
直流电机驱动控制装置H桥驱动的设计与制作毕业设计

直流电机驱动控制装置(H桥驱动)的设计与制作毕业设计摘要 (I)ABSTRACT (II)目录 (III)第一章绪论 (1)1.1概述 (1)1.2国外发展现状 (1)1.3本设计目的和思路 (2)第二章直流电机驱动控制概述 (4)2.1直流电机的工作原理 (4)2.2直流电机的调速特性 (5)2.3直流电机的几种调速方法 (5)2.4直流电机调速PWM信号形成原理 (8)2.5直流电机H桥驱动原理 (11)第三章驱动控制方案论证和选择 (14)3.1稳压电源的选择 (14)3.2直流电机驱动模块的选择 (14)3.3 PWM调速实现方式 (15)3.4 PLC实现电机控制 (16)第四章直流电机驱动控制系统总体硬件电路设计 (17)4.1稳压电源电路设计 (17)4.2 H桥驱动电路设计 (19)4.3 PLC可编程控制器电路设计 (21)4.4 PWM信号发生器设计 (25)第五章直流电机驱动控制系统软件设计 (26)5.1 PLC梯形图程序设计 (26)5.2 PWM 信号发生器软件设计 (28)第六章直流电机驱动控制装置制作与演示 (29)6.1稳压电源的设计制作 (29)6.2 H桥驱动电路设计制作 (30)6.3可编程控制器安装接线 (31)6.4直流电机驱动控制装置演示 (34)第七章结论 (36)参考文献 (37)致谢 (38)附录1直流电机H桥驱动硬件原理总图 (39)附录2 PWM发生器程序清单 (40)附录3 PLC可编程控制器梯形图程序 (45)附录4元器件清单 (46)附录5直流电机驱动控制装置PLC控制操作使用说明书 (49)第一章绪论1.1概述19世纪70年代前后相继诞生了直流电动机和交流电动机,从此人类社会进入了以电动机为动力设备的时代。
以电动机作为动力机械,为人类社会的发展和进步、工业生产的现代化起到了巨大的推动作用。
在用电系统中,电动机作为主要的动力设备而广泛地应用于工农业生产、国防、科技及社会生活等各个方面。
微型直流电机驱动原理及设计PPT演示课件

H桥驱动电路原理
要使电机运转,必须使对角线上的一对三极管导通。例如, 如下图所示,当Q1管和Q4管导通时,电流就从电源正极经 Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电 流箭头所示,该流向的电流将驱动电机顺时针转动。当三极 管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机 按特定方向转动(电机周围的箭头指示为顺时针方向)。
直流电动机应用
• 录音机、录像机、电动剃须刀、电动玩具、电动 自行车等
• 控制内容:直流电动机启动、暂停或转速、旋转 方向等
• 驱动电路构成:直流电源、开关、调速装置等 • 直流电机工作原理不讲,自己看书
电机的种类
电机是一种将电能转换成机械能的装置,在各个领域都有 广泛的应用。电机有多种不同的类型,常见电机分类如下:
直流电动机的调速方法
• 1、变电枢电压调速。这种方法具有启动力矩大,阻尼效 果好,响应速度快,线性度好等优点,应用较多。
• 2、变磁通调速。实际上是改变励磁磁场的大小,对于励 磁电机来说,改变励磁电压可以进行变磁通调速。这种调 速方式调速范围小,而且会使电机的机械特性变软,一般 只作为变电枢电压调速的辅助方式。
H桥驱动芯片-L298
L298是著名的SGS公司的产品,内部包含4通道逻辑驱 动电路,具有两套H桥电路。L298内置两个H桥,每个桥 提供1A的额定工作电流,和最大3A的峰值电流。它能驱动 的马达不超过可乐罐大小。
伺服电机
电动机
控制电机
步进电机 力矩电机 无刷直流电机
详解直流电机驱动电路设计

直流电机(direct current machine)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
它是能实现直流电能和机械能互相转换的电机。
当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。
直流电机的基本构成直流电机由定子和转子两部分组成,其间有一定的气隙。
直流电机的定子由机座、主磁极、换向磁极、前后端盖和刷架等部件组成。
其中主磁极是产生直流电机气隙磁场的主要部件,由永磁体或带有直流励磁绕组的叠片铁心构成。
直流电机的转子则由电枢、换向器(又称整流子)和转轴等部件构成。
其中电枢由电枢铁心和电枢绕组两部分组成。
电枢铁心由硅钢片叠成,在其外圆处均匀分布着齿槽,电枢绕组则嵌置于这些槽中。
换向器是一种机械整流部件。
由换向片叠成圆筒形后,以金属夹件或塑料成型为一个整体。
各换向片间互相绝缘。
换向器质量对运行可靠性有很大影响。
直流电机的组成结构直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
01定子主磁极主磁极的作用是产生气隙磁场。
主磁极由主磁极铁心和励磁绕组两部分组成铁心一般用0.5mm~1.5mm厚的硅钢板冲片叠压铆紧而成,分为极身和极靴两部分,上面套励磁绕组的部分称为极身,下面扩宽的部分称为极靴,极靴宽于极身,既可以调整气隙中磁场的分布,又便于固定励磁绕组。
励磁绕组用绝缘铜线绕制而成,套在主磁极铁心上。
整个主磁极用螺钉固定在机座上。
换向极换向极的作用是改善换向,减小电机运行时电刷与换向器之间可能产生的换向火花,一般装在两个相邻主磁极之间,由换向极铁心和换向极绕组组成。
电机驱动模块课程设计
电机驱动模块课程设计一、课程目标知识目标:1. 理解电机驱动模块的基本原理,掌握电机种类、结构及其工作特性;2. 掌握电机驱动电路的设计方法,了解驱动模块的参数设置与调整;3. 了解电机转速、转向的控制原理,能够运用相关公式进行计算。
技能目标:1. 能够正确选择合适的电机驱动模块,并进行基本的电路连接与调试;2. 学会使用相关软件对电机驱动模块进行编程与控制,实现电机的启动、停止、转速调节等功能;3. 培养实际操作与动手能力,能够解决电机驱动模块在实际应用中遇到的问题。
情感态度价值观目标:1. 培养学生对电机驱动模块的兴趣,激发学习热情,形成积极探索的学习态度;2. 培养学生的团队合作意识,学会在小组合作中共同解决问题,互相学习,共同进步;3. 增强学生的环保意识,了解电机驱动模块在节能减排方面的意义,提高社会责任感。
课程性质:本课程为电机驱动模块的实践应用课程,注重理论联系实际,强调学生的动手操作能力和实际应用能力的培养。
学生特点:学生具备基本的电子电路知识,具有一定的编程基础,对电机驱动模块有一定了解,但对实际应用和动手操作经验有限。
教学要求:教师需结合学生特点和课程性质,采用讲授、实践、讨论等多种教学方式,引导学生主动参与,注重培养学生的实际操作能力和解决问题的能力。
通过课程学习,使学生能够将所学知识应用于实际项目中,提高综合运用能力。
二、教学内容1. 电机原理与种类:介绍直流电机、步进电机、伺服电机等常见电机的结构、原理及特性,结合教材第二章内容,让学生了解电机的基本知识。
2. 电机驱动电路设计:讲解电机驱动电路的基本组成、功能及设计方法,结合教材第三章内容,学习驱动模块的选型、参数设置与调整。
3. 电机控制编程:学习电机控制的基本编程方法,包括启动、停止、转速调节等,结合教材第四章内容,掌握相关编程技巧。
4. 电机驱动模块应用实例:分析实际应用案例,如智能车、机器人等,结合教材第五章内容,让学生了解电机驱动模块在不同场景的应用。
直流有刷电机驱动项目需求分析,超实用!

直流有刷电机驱动项目需求分析,超实用!一、项目名称:《直流电机驱动器设计》二、项目需求分析:我们想设计一款直流有刷电机驱动器,那么在设计驱动器之前,我们需要明确驱动器的控制对象,知道控制对象的参数,这样才能设计出一款适合控制对象、稳定、鲁棒性强的驱动器。
所以,下面我们需要先来介绍下项目的控制对象。
控制对象信息:电机型号:140有刷电机电压范围:1.5V-6V电流:500mA转速:14000转/分,有正负5%的误差电机重量:16g电机内阻(实测):1.2欧姆如下图一为电机实物展示图。
图一:140直流有刷电机明确了控制对象的参数之后,接下来就需要根据这些参数来设计属于这款电机的驱动器了。
那么,我们可以根据电机的电压参数,确定出Vbus电压,因为电压的范围是1.5V至6V,而一般5V比较常用,所以我们决定选5V作为Vbus电压。
电压确定好之后,我们需要根据要实现的控制功能来选择相应的控制方案。
或者说,我们要使用单片机控制的话,需要根据功能来对单片机选型。
所以,接下来先对我们要实现的控制功能进行说明(注意:如果项目是别人或者别的公司的话,控制功能需要由项目提供者给出)。
这里我们就自己定一个需要实现的功能来实现驱动器的设计了。
下面将控制功能罗列如下:1.实现电机正反转调速控制。
2.LED灯状态显示。
3.电压采集。
4.电压保护。
那么,要实现电机正反转调速控制的话,正反转的实现,就需要用到H桥了,调速的话,就要使用到PWM波了。
那么,也就是说,至少需要选型的这款单片机至少能够输出2路PWM信号,其它两路的话可以使用电平控制。
这样的话,我们可以选择H桥的上桥用电平来控制,只需要两个普通的IO口即可实现。
H桥的下桥用PWM控制来实现电机调速的功能,所以下桥的驱动信号使用PWM即可。
然后LED显示的话,使用一个普通的IO口就可以实现。
要实现电压保护的话,需要用到ADC模块了,需要一个模拟IO 口。
PWM占空比的调节可以通过一个电位器来实现,电位器的电压采集也需要ADC模块,同样需要一个模拟IO口。
基于IR2136的无刷直流电机驱动电路的设计

基于IR2136的无刷直流电机驱动电路的设计随着电力电子技术和高性能永磁材料的开展,无刷直流电机的应用在航空航天、医疗、家电及自动化领域获得了迅猛的开展。
无刷电机驱动电路是数字控制电路和无刷直流电机联系的纽带,它采用功率电子开关和霍尔位置传感器代替有刷电机中的电刷和换相器,接收来自数字电路的控制信号,将电流分配给无刷电机定子上的U、V、W三相绕组。
相对于数字控制局部,驱动电路是电机控制系统中的薄弱环节。
因此,电机功率驱动模块电路性能的好坏将直接关系到系统的整体性能和可靠性。
以IR公司的专用驱动功率芯片IR2136为中心,采用MOSFET作为功率开关器件,完成了三相全桥逆变电路的设计,选用的MOSFET管为RFP2 60N。
驱动电路接收电机输出的代表转子位置的3个霍尔信号HA、HB、HC,并接收经过隔离处理过的PWM波和控制电机转向的方向信号DIR,经过组合逻辑运算,输出按一定次序控制6个功率MOSFET导通与关断的信号。
在MOSFET的应用中,驱动、保护这两个问题必须全面考虑。
文中详细介绍了功率驱动电路中驱动局部和保护局部的设计,并在分析计算的根底上对电路的关键参数进展了选择。
1 功率驱动电路采用的驱动电路原理框图如图1所示,共包括4个局部:信号隔离局部、驱动局部、三相逆变桥局部及过流保护局部。
1.1 信号隔离局部电机控制信号PWM和DIR产生电路为数字电路,工作频率比拟高,工作电压及电流都比拟低。
而功率驱动模块的电压和电流比拟大,如果驱动模块的高压大电流串入前端控制数字电路,将会对数字控制电路造成干扰。
为了保证DSP可靠工作,必须实现弱信号的DSP硬件系统与大电流的功率放大电路之间进展隔离与匹配。
本设计中采用集成光耦HCPL2231模块,外围电路如图2所示,该模块由两通道独立光耦组成。
光耦隔离实现了单方向传递信号,寄生反应极小,传输信号带宽为6 MHz,完全可以满足需要传输的PWM和DIR信号带宽要求。
电机驱动模块课程设计
电机驱动模块课程设计一、教学目标本课程的教学目标是使学生掌握电机驱动模块的基本原理、运行方式和应用场景。
具体包括:1.知识目标:学生能够描述电机的工作原理、结构特点和分类,理解电机驱动模块的功能和性能指标,掌握电机控制的基本方法。
2.技能目标:学生能够分析电机驱动模块在实际应用中可能遇到的问题,并采取合适的措施解决。
能够根据项目需求,设计和优化电机驱动模块的电路和控制系统。
3.情感态度价值观目标:培养学生对电机驱动模块技术的兴趣和好奇心,提高学生解决实际问题的能力,培养学生的创新精神和团队合作意识。
二、教学内容本课程的教学内容主要包括电机驱动模块的基本原理、运行方式、应用场景和控制方法。
具体安排如下:1.电机的基本原理和结构:介绍电机的工作原理、各种电机的结构特点和分类。
2.电机驱动模块的功能和性能:讲解电机驱动模块的功能、性能指标及其测试方法。
3.电机控制技术:介绍电机控制的基本方法,包括开关控制、模拟控制和数字控制等。
4.电机驱动模块的应用案例:分析实际应用中电机驱动模块的设计和优化方法。
5.电机驱动模块的故障分析和维修:讲解电机驱动模块的常见故障及其原因,提供故障分析和维修方法。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学。
包括:1.讲授法:讲解电机驱动模块的基本原理、运行方式和应用场景。
2.案例分析法:分析实际应用中电机驱动模块的设计和优化案例,提高学生的应用能力。
3.实验法:学生进行电机驱动模块的实验操作,培养学生的动手能力和实际问题解决能力。
4.小组讨论法:学生进行小组讨论,分享学习心得和经验,提高学生的团队合作意识。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选择合适的教材,为学生提供系统的学习资料。
2.参考书:提供相关的参考书籍,丰富学生的知识储备。
3.多媒体资料:制作精美的PPT、视频等多媒体资料,提高学生的学习兴趣。
4.实验设备:准备充足的实验设备,确保每个学生都能动手进行实验操作。
直流电机驱动模块

一.方案论证由于使用的是永磁式直流电机,因此只能对电枢电压进行控制来实现电机转速和方向的控制,因此电机驱动模块要能方便的实现对输出电压的大小和极性控制。
可以考虑的方案有:方案一:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。
这个方案的优点是电路比较简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命较短可靠性不高。
方案二:采用功率管组成H桥型电机驱动电路,并利用PWM波来实现对输出电压的有效值大小和极性进行控制。
这种调速方式具有调速特性优良、调整平滑、调速范围广、过载能力大,能承受频繁的负载冲击,能耗小等优点,还可以实现频繁的无级快速启动和反转等优点。
方案三:采用L298专用芯片进行驱动。
L298芯片的工作原理和方案二一致,但是其工作时较方案二稳定,且编程较为简单,便于调试。
另外L298内部集成了两个H桥,能同时驱动两个电机,硬件实现较方案二简单。
基于上述理论分析,拟定方案三,为了防止电机驱动电路对控制模块的影响,采用光电耦合进行隔离。
二.电路原理分析图E.1 电机驱动电路(注:图见智能小车论文模块)图E.2 L298内部结构图由于系统有两个电机时使用PWM 信号控制直流电机电枢电压有效值来改变电机速度和方向,所以需采用L298芯片来控制两个电机,引脚6,11用来PWM 控制,将5,7和7,12分别接高低电平,仅用单片机的两个端口输出PWM 控制6,11引脚就可以实现直行,转弯和后退,由于前轮的驱动能力较大,提高控制的可靠性,缩短导通时间;六个光耦器件起到隔离作用,将单片机发出的控制与电机驱动电路隔离(起来),防止干扰,在电机的两端并联一个104的小电容。
滤去高频谐波信号。
其工作原理如下:当P1^0和P1^1的信号输入为高电平和PWM 电平时,L298的2和3引脚分别输出高低电平,电机正传,如果改变P1^0和P1^1信号,则L298的2和3引脚分别输出低高电平,电机反转。
直流电机驱动设计
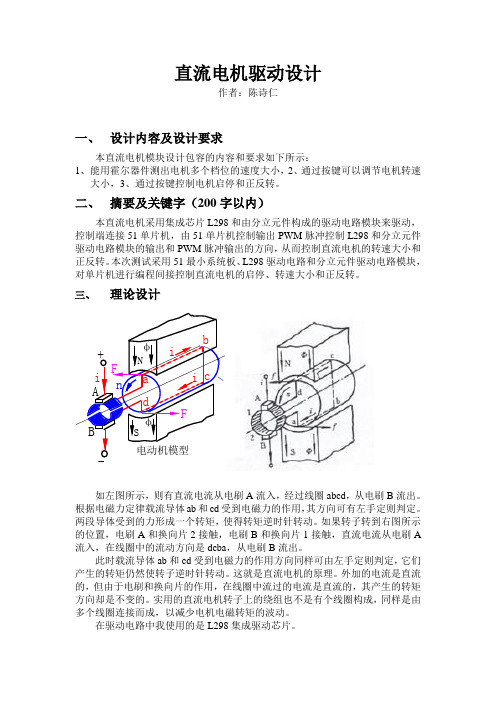
直流电机驱动设计作者:陈诗仁一、设计内容及设计要求本直流电机模块设计包容的内容和要求如下所示:1、能用霍尔器件测出电机多个档位的速度大小,2、通过按键可以调节电机转速大小,3、通过按键控制电机启停和正反转。
二、摘要及关键字(200字以内)本直流电机采用集成芯片L298和由分立元件构成的驱动电路模块来驱动,控制端连接51单片机,由51单片机控制输出PWM脉冲控制L298和分立元件驱动电路模块的输出和PWM脉冲输出的方向,从而控制直流电机的转速大小和正反转。
本次测试采用51最小系统板、L298驱动电路和分立元件驱动电路模块,对单片机进行编程间接控制直流电机的启停、转速大小和正反转。
三、理论设计如左图所示,则有直流电流从电刷A流入,经过线圈abcd,从电刷B流出。
根据电磁力定律载流导体ab和cd受到电磁力的作用,其方向可有左手定则判定。
两段导体受到的力形成一个转矩,使得转矩逆时针转动。
如果转子转到右图所示的位置,电刷A和换向片2接触,电刷B和换向片1接触,直流电流从电刷A 流入,在线圈中的流动方向是dcba,从电刷B流出。
此时载流导体ab和cd受到电磁力的作用方向同样可由左手定则判定,它们产生的转矩仍然使转子逆时针转动。
这就是直流电机的原理。
外加的电流是直流的,但由于电刷和换向片的作用,在线圈中流过的电流是直流的,其产生的转矩方向却是不变的。
实用的直流电机转子上的绕组也不是有个线圈构成,同样是由多个线圈连接而成,以减少电机电磁转矩的波动。
在驱动电路中我使用的是L298集成驱动芯片。
L298是SGS 公司的产品,比较常见的是15脚Multiwatt 封装的L298N ,内部同样包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
图为L298驱动芯片L298N 可接受标准TTL 逻辑电平信号V SS ,V SS 可接4.5~7 V 电压。
4脚V S接电源电压,V S 电压范围V IH 为+2.5~46 V 。
基于H桥控制直流电机驱动电路设计
基于H桥控制直流电机驱动电路设计林海滨※张镐(厦门蒙发利电子有限公司,福建厦门361100)摘要:基于H桥控制技术设计了1款用于直流电机的驱动电路,该电路自带开路和短路保护功能。
系统由MCU信号生成电路、光电隔离电路、电机逻辑驱动电路、H桥功率驱动电路、电流采样电路、滤波检波电路、线性放大隔离电路等五部分组成。
电机逻辑驱动电路是核心部分,其主要由单片机时序控制、信号缓冲处理、光电隔离电路、滤波电路等组成;H桥功率驱动电路,由4个MOS管组成,上下桥臂分别用2个P沟道功率MOS管和2个N沟道功率MOS管。
通过对逻辑电路时序的巧妙控制,遏制了H桥驱动的直通现象,无需增加死区的控制电路。
系统最大的特点是结构简单,可靠性强,且输出功率优于IC驱动,易形成性价比高的方案。
关键词:H桥;,PWM;直流电机;驱动;逻辑控制DC Motor Driver Design Base on the H-bridge ControlledLIN Haibin ZHANG Hao(XIAMEN COMFORT SCIENCE & TECHNOLOGY GROUP)Abstract: Based on the h-bridge control technology, a driver circuit for dc motor is designed. The circuit has the function of open circuit and short circuit protection.System consists of MCU signal generated logic circuit, photoelectric isolation circuit, motor drive circuit, H bridge power drive circuit, current sampling circuit, filter detection circuit, linear amplification of isolating circuit and so on five parts.The motor logic drive circuit is the core part, which consists of single chip computer time series control, signal buffer processing, optoelectronic isolation circuit and filter circuit.H bridge power drive circuit consists of four MOS tubes, with two P channel power MOS tubes and two n-channel power MOS tubes respectively.By controlling the sequence of logic circuits, the direct current of h-bridge is restrained, and the control circuit of the dead zone is not required.The system is characterized by simple structure, strong reliability and better output power than IC drive.Key words: H bridge;PWM;Dc motor;Drive;Logic control0 引言直流电机具有良好的线性特性、优异的控制性能等特点,成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。
一种24V直流电机驱动器设计

一种24V直流电机驱动器设计一种24V直流电机驱动器设计电动机分为交流电机和直流电机两大类。
长期以来,直流电机以其良好的线性特性、优异的控制性能、较强的过载能力成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择,一直处在调速领域主导地位。
传统的直流电机调速方法很多,如调压调速、弱磁调速等,它们存在着调速响应慢、精度差、调速装置复杂等缺点。
随着全控式电力电子器件技术的发展,以大功率晶体管作为开关器件的直流脉宽调制(PWM)调速系统已成为直流调速系统的主要发展方向。
为配套24V直流电机,设计了一种直流无刷电机驱动器。
采用美国Microchip公司的PIC16F690单片机作为控制器,MOSFET为驱动元件,配以相应的控制软件构成控制系统。
实践表明,整个系统的精度、快速性以及可靠性等指标都能满足实际需求。
1PWM直流调速原理在PWM调速系统中,一般可以采用定宽调频、调宽调频、定频调宽3种方法改变控制脉冲的占空比,但是前两种方法在调速时改变了控制脉宽的周期,从而引起控制脉冲频率的改变,当该频率与系统的固有频率接近时将会引起振荡。
为避免之,设计采用定频调宽改变占空比的方法来调节直流电动机电枢两端电压。
定频调宽法的基本原理是按一个固定频率来接通和断开电源,并根据需要改变一个周期内接通和断开的时间比(占空比)来改变直流电机电枢上电压的占空比,从而改变平均电压,控制电机的转速。
在PWM调速系统中,当电机通电时其速度增加,电机断电时其速度减低。
只要按照一定的规律改变通、断电的时间,即可控制电机转速。
而且采用PWM技术构成的无级调速系统,启停时对直流系统无冲击,并且具有启动功耗小、运行稳定的优点。
为了说明问题,现假定电机始终接通电源时,电机最大转速为Vmax,占空比为D=t/T,则电机的平均速度Vd=D*Vmax,由公式可知,当改变占空比D=t/T时,就可以得到不同的电机平均速度Vd,从而达到调速的目的。
在一般应用中,可将平均速度与占空比D近似地看成线性关系。
直流电机驱动电路设计

直流电机驱动电路设计应用越来越广泛的直流电机,驱动电路设计Source:电子元件技术| Publishing Date:2009-03-20中心论题:•在直流电机驱动电路的设计中,主要考虑功能和性能等方面的因素•分别介绍几种不同的栅极驱动电路并比较其性能优缺点•介绍PWM调速的实现算法及硬件电路•介绍步进电机的驱动方案解决方案:•根据实际电路情况以及要求仔细选择驱动电路•使用循环位移算法及模拟电路实现PWM调速•对每个电机的相应时刻设定相应的分频比值,同时用一个变量进行计数可实现步进电机的分频调速直流电机驱动电路的设计目标在直流电机驱动电路的设计中,主要考虑一下几点:功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
性能:对于PWM调速的电机驱动电路,主要有以下性能指标。
1。
输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2。
效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3。
对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4。
对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5。
可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
三极管-电阻作栅极驱动1.输入与电平转换部分:输入信号线由DATA引入,1脚是地线,其余是信号线。
L6203直流电机驱动设计原理图及例程

L6203直流电机控制驱动器【简要说明】一、尺寸:长66mmX宽33mm X高28mm二、主要芯片:L6203三、工作电压:控制信号直流4.5~5.5V;驱动电机电压7.2~30V四、可驱动直流(7.2~30V之间电压的电机)五、最大输出电流4A六、最大输出功率20W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制一台直流电机6、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)7、可实现正反转8、此驱动器非常时候控制飞思卡尔智能车,驱动器压降小,电流大,驱动能力强。
【标注图片】直流电机的控制实例使用驱动器可以控制一台直流电机。
电机分别为OUT1和OUT2。
输入端EN可用于输入PWM脉宽调制信号对电机进行调速控制。
(如果无须调速可将EN使能端,接高低电平,高电平启动,低电平停止。
也可由单片机输出直接控制)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机正转。
(如果信号端IN1接低电平,IN2接高电平,电机反转。
)可参考下图表:电机旋转方式控制端IN1控制端IN2EN使能端M 正转高低高反转低高高调速* * 输入PWM信号直流电机测试程序【原理图】【测试程序】/********************************************************************汇诚科技实现功能:调试程序使用芯片:AT89S52 或者 STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技*********************************************************************/ #include<reg52.h>#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型sbit P2_0=P2^0;//启动sbit P2_1=P2^1;//停止sbit P2_2=P2^2;//正转sbit P2_3=P2^3;//反转sbit P1_0=P1^0;//使能sbit P1_1=P1^1;//IN1sbit P1_2=P1^2;//IN2/********************************************************************延时函数*********************************************************************/ void delay(uchar t)//延时程序{uchar m,n,s;for(m=t;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ main(){while(1){if(P2_0==0){delay(3);if(P2_0==0)//启动{P1_0=1;P1_1=1;P1_2=0;}}if(P2_1==0){delay(3);if(P2_1==0)//停止{P1_0=0;}}if(P2_2==0){delay(3);if(P2_2==0)//正转{P1_1=1;P1_2=0;}}if(P2_3==0){delay(3);if(P2_3==0)//反转{P1_1=0;P1_2=0;}}}}/********************************************************************结束*********************************************************************/L6203DMOS(消耗型金属氧化物半导体)全控桥驱动器⏹供电电压:48V⏹最大峰值电流5A(L6021最大2A)⏹电流有效值:⏹L6201: 1A; L6202: 1.5A; L6203/L6201PS: 4A ⏹R DS (ON) 电阻值0.3 Ω (室温25 ︒C)⏹击穿电压保护⏹兼容TTL电路⏹运行最高频率100KHz⏹热滞⏹集成逻辑电路使用⏹高效概述L6201是一种应用多源BCD(Bipolar,CMOS,DMOS)技术来控制电机的全控桥驱动器芯片,这种芯片能将独立的DMOS场效应晶体管和CMOS以及二极管集成在一块芯片上。
一种直流无刷电机驱动电路的设计与优化_宋慧滨

一种直流无刷电机驱动电路的设计与优化宋慧滨,徐 申,段德山(东南大学国家ASIC 系统工程技术研究中心 江苏南京 210096)摘 要:设计了一种用于直流无刷电机的控制驱动电路,该电路完全采用分立元件构成,具有成本低、易实现、可靠性高等特点。
在简单阐述直流无刷电机工作原理的基础上,分析了其驱动电路的设计要点。
结合设计的控制驱动电路,讨论了功率M OS 管栅极浮置驱动、互补脉宽调制死区时间设置的问题,分析了驱动电路中振荡产生的原因,并给出优化方法。
在最后的实际测试中,验证了该电机驱动电路的各种功能及优化改进后的效果。
关键词:直流无刷电机;驱动电路;功率M OS 管;脉宽调制中图分类号:T M 36+1 文献标识码:B 文章编号:1004373X (2008)0312203Design and Optimization for a Brushless DC Motor Drive CircuitSO NG Huibin ,XU Shen ,D U A N Deshan(Na tional ASIC Sy stem Enginee ring Resea rch Cente r ,So uthe ast Unive rsity ,Na njing ,210096,China )Abstract :In this paper ,a drive circuit for brushless DC mo to r is pro po sed .It is desig ned with discrete elements ,has the features of lo w price ,easy w ay to rea lize a nd hig h reliability .Based on the presentation of moto r ′s wo rking principle ,the paper analyses the impo r tant points of the drive circuit desig n .So me pro blems are discussed w ith the pro po sed circuit ,such as the flo ating g ate drive fo r the powe r M OSF ET ,the dead time setup of the co mplementary PWM o utputs ,the reasons to fo rm the oscillatio n and the way to o ptimize the drive circuitry .In the end o f this pa per ,a test is pe rfor med to verify the functions o f the circuit and o bser ve the effect after the o ptimizatio n .Keywords :brushless DC mo to r ;drive circuitry ;pow er M O SFET ;PW M收稿日期:20070910 直流无刷电动机既具有运行效率高、调速性能好,同时又具有交流电动机结构简单、运行可靠、维护方便的优点,是电机主要发展方向之一[1],现已成功应用于军事、航空、计算机、数控机床、机器人和电动自行车等多个领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工作电压为5-40V,输出端导通电阻为120毫欧姆,输入信号可为TTL/CMOS,工作时所采用的PWM频率应小于10KHz,即一般情况下其频率应小于10KHZ,其极限频率可达到20KHZ。(由下图可知当PWM频率小于10KHZ时,比如为1KHZ时,输出端可输出正常标准的PWM方波信号,若PWM频率大于10KHZ,则输出端不能输出标准的方波信号!)
MC33886可以方便控制电机的正、反转,刹车制动,它输出驱动由4个大电流场效应管组成,驱动开关特性好,效率高,本身护功能;
如下图为工作时的PWM频率分别为各种值时输出所对应的方波波形!
大赛规定使用的电机为RS-380SH型碳刷直流电机,使用MC33886芯片驱动。直流电机的输出功率为0.9W—40W.其正常情况下的工作电压范围为3伏—9伏。其空载情况下转速可以达到16200rpm。
芯片在本系统中的应用设计:
在由于赛车过程中不时用倒车,所以可以只使用其中的半桥;并且将两个半桥并联,即将芯片中的两个OUT1端连在一起,且两个OUT2端连在一起。以此来扩大芯片的驱动能力(因为其输出端的导通电阻为120毫欧,将各两端连起来后,相当于两个120毫欧的导通电阻并联起来,即此时的总导通电阻仅为60毫欧!从而在电路上的电压损耗就降低了,即加在电机上的电压相对加大,增加了驱动能力!同理若经济条件允许,则可使用多片MC33886芯片并联起来使用,以进一步增强驱动能力。
为了避免由于驱动电机转动时所引起的电磁干扰,在电路板设计中,在印制板上应该做敷铜处理,将电路中的“地”与敷铜面相连接。
鉴于以上本芯片在PWM频率上有限制,我们初步可选择PWM的频率为1KHZ。
查阅MC33886芯片的DATASHEET后我们知道,当输入IN1为高电平且IN2为低电平时,则输出OUT1为高且OUT2为低,即工作在前进状态。由于赛车过程中不用倒车,所以我们只需要考虑芯片前进的控制状态。所以我们就可以将IN2接地(永久为低电平),而把IN1接到单片机芯片的PWM口,通过调节PWM的占空比来调节电机的前进速度!在编程时可以设定若干个固定的不同的占空比的值来控制小车运行在各种状态时的速度,如运行在直道时的最大速度,正常速度,运行在弯道时的极限转弯速度等等芯片中的D1,D2其实就可以看成是电机运行的使能端,因为这两个引脚的信号都可以使本驱动芯片的输出为三态(即禁止状态),且当D1脚的输入为高或D2脚的输入为低时,将禁止芯片的输出功能。
真值表中的Free Wheeling Low和Free Wheeling High都表示自由惯性滑行状态,即当芯片的OUT1和OUT2都同时为高或低时,电机处于惯性滑行状态!
下图为本芯片的真值表!
下图为我初步设计的第1种方案用于驱动后轮直流电机的电路图!
下图为我初步设计的第2种方案用于驱动后轮直流电机的电路图!(在电机处连上一个300UH的电感,再并接一个续流二极管)
为解决这一干扰问题,第1种方案是在电路设计中,在电源输入端,各芯片电源引脚都加入了滤波电路。
第2种方案可以在电机与MC33886输出之间串联了一个300uH的电感,利用电感的隔交流通直流的特性,来稳定电机上的电流,由电池的输出电压公式:U*=Φ−r I(Φ为电池电动势,r为电池内阻),可知电源电压将稳定下来。但是由于电感会产生自感电动势,所以在关机时将形成一个强大反向冲击电压,故要MC33886的输出端反接了一个肖特基二管,用来吸收这个冲击脉冲,保护MC33886。
工作电压使用7.2V直流供电。电机转速我们采用PWM波控制,PWM控制的好处就是驱动电路耗能。但是一般PWM驱动电路有个较严重的缺点:MC33886打开自身场效应管驱动电机瞬间,7.2v电源的电压直接加到电机上,形成很大的冲击电流,由于电源内阻的存在,这将严重影响电源电压的稳定,进而影响MCU工作。