L293D直流电机驱动电路图和解答
智能循迹避障小车设计分析解析

毕业设计(论文)课题名称智能循迹避障小车设计学生姓名XXX学号00000000000000系、年级专业XXXXXXXXXXXXXXXXXXX指导教师XXX职称讲师2016年5月18日摘要自从首个工业智能设施诞生以来,智能设施的发展已经扩展到了包括机器、刻板、电子、冶金、交通、宇航、国防等产业领域。
近年来智能设施水平迅速上升,大大的改变了大多数人类的生活方式。
在人类的智能化技术不断飞速进步的过程中,能够取代手动的机器人在更加人性化的同时也越来越智能化。
本文主要讨论了基于单片机的智能循迹避障小车的设计。
智能自动循迹制导系统在驱动电路的基础上,实现自动跟踪汽车导线,而智能避障是使用红外传感器测距系统来实现功能来规避障碍。
智能寻光避障小车是一种采用了多种传感器,以单片机为核心,电力马达驱动和自动控制为技术,根据程序预先确定的模式,而不是人工管理来实现避障导航的自动跟踪高新技术。
这项技术已广泛应用于智能无人驾驶、智能机器人、全自动工厂等许多领域。
这个设计使用STC89C52单片机[1]作为小车的智能核心,使用红外传感器对智能小车跟踪模块识别引导线跟踪,收集模拟信号并将信号转换成为数字信号,使用C 语言编写程序,设计的电路结构简单,易于实现,时效性高。
关键词:智能化;单片机最小系统;传感器;驱动电路ABSTRACTFrom the first level of industrial intelligent facilities since birth, the development of intelligent facilities has been broadened to include machinery, electronics, metallurgy, transportation, aerospace, defense and other fields. Intelligent facilities level rising in recent years, and rapidly, significantly changed the way people live. People in the process of thinking, improvement, learning and intelligence of replace the manual machine is more and more.This paper mainly discusses the intelligent tracking based on single chip microcomputer control process of the obstacle avoidance car. Intelligent automatic tracking is based on the driving circuit of the guidance system, to achieve automatic tracking car line; obstacle avoidance is the use of infrared sensor ranging system to realize the function to evade obstacles. Intelligent tracking obstacle avoidance car is a use different sensor , motor drive for power and automatic control technology to realize according to the procedures predetermined mode, not by artificial management can realize the automatic tracking of obstacle avoidance navigation of high and new technology. The technology has been widely used in unmanned intelligent unmanned line, intelligent robot and so on many fields.Using infrared sensors for car tracking module to identify the guide line tracking, collecting analog signal and converts the signal into digital signal; Using C language to write the program, the design of the circuit structure is simple, easy to implement,timeliness is high.Keywords: Intelligent; Single chip microcomputer minimum system; The Sensor; Driver circuit目录第1章绪论 (1)1.1智能小车的发展近况与趋势 (1)1.2课题研究的目的及意义 (1)1.3课题研究的主要内容 (2)第2章方案设计 (3)2.1系统概述 (3)2.2硬件模块方案 (3)2.3软件模块方案 (5)第3章硬件设计 (6)3.1电源模块 (6)3.2核心控制模块 (6)3.3循迹模块 (7)3.4避障模块 (8)3.5无线遥控模块 (9)3.6电机驱动模块 (10)3.7拓展模块 (13)第4章软件模块 (15)4.1循迹程序模块 (15)4.2避障程序模块 (16)4.3无线遥控程序模块 (17)4.4寻光拓展程序模块 (18)4.5驱动电机程序模块 (19)第5章系统测试与分析 (20)5.1硬件调试 (20)5.2软件调试 (21)总结 (22)参考文献: (23)附录 (24)致谢 (25)第1章绪论1.1智能小车的发展近况与趋势1.1.1智能小车的发展近况现阶段智能汽车的发展十分的迅速,从智能玩具到其他各行各业都有实质性的结果[1]。
L293D直流电机驱动电路图和解答
我没有自己设计电路来实现“H”桥,而是决定查找一种商用的解决方案。
本应用选择了Unitrode的“293D”电机驱动芯片,因为它连接简单,而且能够控制在各种电压下向电机、继电器或其他磁性元件提供最大2安培的电流。
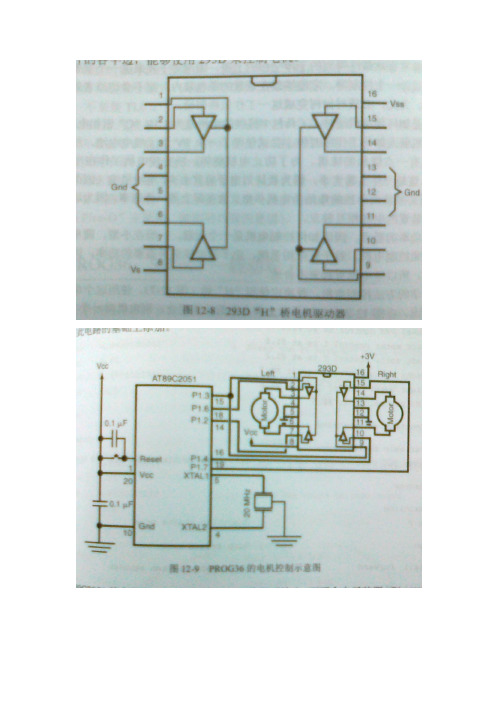
图12-8没有实际画出293D的引出线,以“H“桥连接方式,通过将电机的两个导线连接在芯片的各半边,能够使用293D来控制电机。
第一个也许也是最重要的一项功能是4各驱动器中的每一个都有嵌位二极管来抑制电机关断时的反EMF。
这一点很重要,因为在驱动器关闭时,所有的磁性元件都会产生大的电压尖峰信号。
这些大的尖峰信号是由电流断开时正在消失的磁场引起的。
因此,在线圈的两端接一个二极管,以便防止这些反EMF干扰或者损坏任何的电子元件。
293D的另一个特性是每个驱动器有一个允许信号。
不必修改驱动器控制部分,就能够使用这些信号实现脉宽调制(PWM)速度控制。
293D的晶体管控制会在芯片内产生1.5V的压降,也就是说,如果想让机器人电机工作在1.5V,因此使用两个1.5V电池串联来控制完全没有问题。
最后一个特点是该芯片能够控制和传递给驱动器的电压范围宽。
对于大电流应用系统,安装该芯片的印制板应该是293D地线引脚周围设计大的散热区。
这个区域能够为该芯片提供更多的铜,以便让电流产生的热辐射出去。
使用293D,能够建立图12-9所示的电路来控制墙角老鼠的两个电机。
这个电路是后面的5各应用示例的基础。
后面将只说明硬件的增强以及它们如何与AT89C2051连接,而不是在此电路的基础上添加。
——飘风抄自《精通80C51程序设计》【Myke Predko编著,田玉敏等译】,这本书里面的语言是汇编语言,以美语为母语的人说汇编就跟我们说成语似的。
兄弟啊,出个人吧,编本以汉子为基础的程序语言吧。
那样的话,中华的技术爱好者比例将超过60%。
而你。
会获得大量的财富的。
中华人会感激你一辈子的。
L293D,额在长春的电子市场买的,价格是10块钱一个。
l293d

L293D介绍L293D是一种常见的集成电路芯片,用于驱动直流电机和步进电机。
它具有多种功能,包括电机驱动、电流放大器、逻辑电平转换等。
L293D可广泛应用于机器人、无人机、汽车等电动装置中。
在本文档中,我们将介绍L293D的主要特点和功能,并提供使用L293D驱动电机的示例电路。
特点以下是L293D的主要特点:1.可同时控制两个直流电机或一个步进电机。
2.具有过热保护功能,确保芯片在超过额定温度时能自动断电。
3.具有内部电流限制功能,可确保电机不会超过额定电流。
4.可以通过外部电源提供电源电压以驱动电机。
5.具有4个输入引脚,用于控制电机的运行方向和速度。
引脚配置L293D芯片的引脚配置如下:L293D引脚配置L293D引脚配置以下是每个引脚的功能:•1号引脚:使能1(Enable 1)- 连接到控制电机1的PWM输入引脚。
•2号引脚:输出1(Output 1)- 与电机1的正极连接。
•3号引脚:输出2(Output 2)- 与电机1的负极连接。
•4号引脚:地(Ground)- 连接到电路的地线。
•5号引脚:输入1(Input 1)- 连接到控制电机1的方向控制引脚。
•6号引脚:输入2(Input 2)- 连接到控制电机1的方向控制引脚。
•7号引脚:使能2(Enable 2)- 连接到控制电机2的PWM输入引脚。
•8号引脚:输出3(Output 3)- 与电机2的正极连接。
•9号引脚:输出4(Output 4)- 与电机2的负极连接。
•10号引脚:电源电压(VCC2)- 连接到外部电源电压引脚。
•11号引脚:地(Ground)- 连接到电路的地线。
•12号引脚:输入3(Input 3)- 连接到控制电机2的方向控制引脚。
•13号引脚:输入4(Input 4)- 连接到控制电机2的方向控制引脚。
•14号引脚:电源电压(VCC1)- 连接到外部电源电压引脚。
使用示例下面是使用L293D驱动直流电机的示例电路图:- 将电源正极连接到VCC1引脚,电源负极连接到地引脚和V CC2引脚。
L293D电机驱动模块使用手册
一、直流电机驱动模块的参数 输入逻辑电压:5.0V 输入电机电压:5.0V-36.0V 输出驱动电流:1000mA 尺寸:(长)34mm * (宽)18mm * (高)8mm
连接方式: P1:控制 M1 电机 PWM1 输入引脚。 D1:控制 M1 电机转向输入引脚。 P2:控制 M2 电机 PWM2 输入引脚。 D2:控制 M2 电机转向输入引脚。 GND:电源地接口。 5V:逻辑电源+5V 接口。 VC:输入电机驱动电压接口。 GND: 电源地接口。 M1+:M1 电机驱动输出引脚正极。 M1-:M1 电机驱动输出引脚负极。 M2+:M2 电机驱动输出引脚正极。 M2-:M2 电机驱动输出引脚负极
}
}
六、测试图
日期:2010-04-25
4/4
ห้องสมุดไป่ตู้
本模块具有体积小,控制方便的特点。采用此模块定会使您的电机控制自如, 应对小车题目轻松自如。
三、两台直流电机的控制方框图
日期:2010-04-25
2/4
新动力电子
L293D 小功率电机驱动模块
/
四、两台直流电机的控制实例
使用直流/步进两用驱动器可以驱动两台直流电机。分别为 M1 和 M2。引 脚 P1,P2 可用于输入 PWM 脉宽调制信号对电机进行调速控制。实现电机正反 转就更容易了,输入信号端 D1 接高电平,电机 M1 正转。(如果信号端 D1 接低 电平,电机 M1 反转。)控制另一台电机是同样的方式,输入信号端 D2 接高电 平,电机 M2 正转。(反之则反转),PWM 信号端 P1 控制 M1 调速,PWM 信号 端 P2 控制 M2 调速。 两台直流电机控制逻辑图表:
日期:2010-04-25
基于51单片机的四驱无线遥控小车(附电路图,源代码)

基于51单片机的四驱无线遥控小车(附电路图,源代码)遥控小车大家都玩过,网上也有各种DIY小车的制作详解,本文介绍的这个遥控小车和其他的作品大同小异,但作为单片机设计,这次设计主要强调单片机控制,就是说,这个小车是由单片机控制的,把单片机按键发送程序、无线模块使用、电机驱动是本教程的核心内容。
一硬件组装1 小车运动部分所需工件:直流电机4个,L293D电机驱动模块,蓄电池一块,车身底盘说明:车身底盘大家根据自己的购买力自行购买,蓄电池也是,至于L293D模块,淘宝上卖的比较贵,不过我用的就是成品模块,效果非常好,钱不多的同学可以自己买芯片,自制模块,原理很简单,官方资料是很详细的;或者改为继电器控制都可以,具体看自己的实际购买力。
用模块的好处是,模块可以输出5V 电源给系统供电,详细请参考淘宝网。
如果你买的是现成的底盘,那就和我的一样了,组装实在是没啥可说的,把电机固定上去就是,不行?别开玩笑了,小学生都会的!至于想自己做底盘的,我想说,要搞结实点,咱这次的小车马力是很足的,因为有电机驱动,速度比较快(不带减速齿轮的底盘一定要小心,速度非常的快),后劲也足,不小心撞墙很正常,所以不好的底盘就得小心了!组装好后,就是电机和驱动模块的接线了,下面我就详细的说一下L293D模块的使用:L293D是专门的电机驱动芯片,工作电压5V,驱动电压输入可达36V,输出电流正负600ma,4个控制端,4个输出端,原理如图:其中A为输出控制端,Y为输出控制端,1A即控制1Y,以此类推。
1,2EN 3,4EN需要短接,芯片最大工作电压不得超过7V。
封装图:Vcc1接工作电压,5V,Vcc2接电机的驱动电源,一般来说,这个电压要比5V 高,我用的是12V蓄电池,就把12v的正极接到VCC2,要记住的是,芯片、单片机、蓄电池电源是需要共地的,不要觉得你电机是12V,单片机控制部分是5V就把电源完全独立开来,正极是完全独立的没错,但是GND(负极)都必须是接在一起的。
直流电机驱动控制电路
1 引言长期以来,直流电机以其良好的线性特性、优异的控制性能等特点成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。
特别随着计算机在控制领域,高开关频率、全控型第二代电力半导体器件(GTR、GTO MOSFET IGBT等)的发展,以及脉宽调制(PWM)直流调速技术的应用,直流电机得到广泛应用。
为适应小型直流电机的使用需求,各半导体厂商推出了直流电机控制专用集成电路,构成基于微处理器控制的直流电机伺服系统。
但是,专用集成电路构成的直流电机驱动器的输出功率有限,不适合大功率直流电机驱动需求。
因此采用N 沟道增强型场效应管构建H 桥,实现大功率直流电机驱动控制。
该驱动电路能够满足各种类型直流电机需求,并具有快速、精确、高效、低功耗等特点,可直接与微处理器接口,可应用PWM 技术实现直流电机调速控制。
2 直流电机驱动控制电路总体结构直流电机驱动控制电路分为光电隔离电路、电机驱动逻辑电路、驱动信号放大电路、电荷泵电路、H 桥功率驱动电路等四部分,其电路框图如图一图1『就电机乂动控制电路框图由图可以看出,电机驱动控制电路的外围接口简单。
其主要控制信号有电机运转方向信号Dir电机调速信号PWM及电机制动信号Brake, Vcc为驱动逻辑电路部分提供电源,Vm为电机电源电压,M+、M-为直流电机接口。
在大功率驱动系统中,将驱动回路与控制回路电气隔离,减少驱动控制电路对外部控制电路的干扰。
隔离后的控制信号经电机驱动逻辑电路产生电机逻辑控制信号,分别控制H桥的上下臂。
由于H桥由大功率N沟道增强型场效应管构成,不能由电机逻辑控制信号直接驱动,必须经驱动信号放大电路和电荷泵电路对控制信号进行放大,然后驱动H桥功率驱动电路来驱动直流电机。
3 H桥功率驱动原理直流电机驱动使用最广泛的就是H 型全桥式电路,这种驱动电路方便地实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。
H 桥功率驱动原理图如图2 所示。
直流电机控制原理图
直流电机控制原理图
直流电机是一种常见的电动机,它通过直流电源驱动,能够将
电能转换为机械能,广泛应用于工业生产、交通运输、家用电器等
领域。
直流电机的控制原理图是直流电机控制系统的重要组成部分,它能够帮助我们了解直流电机的工作原理和控制方式,本文将介绍
直流电机控制原理图的相关知识。
首先,直流电机控制原理图包括直流电机、电源、控制器等组件。
直流电机通常由定子、转子、碳刷、电枢等部分组成,电源为
直流电源,控制器则是用来控制电机运行的设备。
在直流电机控制
原理图中,这些组件通过电气连线连接在一起,形成一个完整的控
制系统。
在直流电机控制原理图中,电源为直流电源,它可以是电池、
直流发电机、直流稳压电源等。
电源的电压和电流大小将直接影响
到直流电机的运行性能,因此在设计直流电机控制系统时,需要根
据实际需要选择合适的电源。
控制器是直流电机控制系统中的关键部件,它可以根据外部输
入信号控制电机的启停、正反转、速度调节等功能。
常见的直流电
机控制器有直流调速器、直流电机驱动器、直流电机控制板等,它们可以根据具体的控制要求选择使用。
在直流电机控制原理图中,还会包括一些辅助元件,如限流电阻、过载保护器、电流传感器等。
这些辅助元件能够提高电机控制系统的稳定性和安全性,保护电机免受过载、短路等异常情况的影响。
总的来说,直流电机控制原理图是直流电机控制系统的重要组成部分,它通过电气连线将直流电机、电源、控制器等组件连接在一起,形成一个完整的控制系统。
掌握直流电机控制原理图的相关知识,能够帮助我们更好地理解直流电机的工作原理和控制方式,为实际应用提供参考和指导。
四种直流电机驱动电路图及设计思路讲解,有图有真相!

四种直流电机驱动电路图及设计思路讲解,有图有真相!本文详细介绍直流电机驱动设计需要注意的事项,低压驱动电路的简易栅极驱动、边沿延时驱动电路图解及其设计思路。
以上是直流电机驱动电路图,下面为您详细介绍直流电机驱动设计需要注意的事项,低压驱动电路的简易栅极驱动、边沿延时驱动电路图解及其设计思路。
一、直流电机驱动电路的设计目标在直流电机驱动电路的设计中,主要考虑一下几点:1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2. 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4)对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5)可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
1.输入与电平转换部分:输入信号线由DATA引入,1脚是地线,其余是信号线。
注意1脚对地连接了一个2K欧的电阻。
当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。
当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。
或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。
基于L293的双向电机驱动器

基于L293的双向电机驱动器
发布: | 作者:—— | 来源: 华强卡卡 | 查看:1044次 | 用户关注:驱动器
所有的输入兼容TTL。
每个输出是一个完整的图腾柱驱动电路,达林顿晶体管片和伪达林源。
驱动程序中启用对,1,2 EN和司机3日和4由3,4 EN启用启用驱动器1和2。
当使能输入高,相关的驱动程序已启用,其输出活跃,在与他们的投入阶段。
当使能输入低,这些驱动程序被禁用,并且其输出关闭,在高阻抗状态。
有了正确的数据输入,每个司机对形成一个完整的H(或桥)可逆驱动器适合电磁铁或电机应用。
使用高电流的L293翻两番半- H的驱动集成电路,我们可以设计一个很简单的的高效率电机控制L293的设计提供4.5伏的电压双向驱动电流为1 A到36 V的L293D 旨在提供双向驱动电流600毫安电压从4.5 V至36五,这两款器件均设计用于驱动感性负载,如继电器,螺线管,直流和双极步进电机,以及其他high-current/high 正电源应用中电压负载。
所有的输入兼容TTL。
每个输出是一个完整的图腾柱驱动电路,达林顿晶体管片和伪达林源。
驱动程序中启用对,1,2 EN和司机3日和4由3,4 EN启用启用驱动器1和2。
当使能输入高,相关的驱动程序已启用,其输出活跃,在与他们的投入阶段。
当使能输入低,这些驱动程序被禁用,并且其输出关闭,在高阻抗状态。
有了正确的数据输入,每个司机对形成一个完整的H(或桥)可逆驱动器适合电磁铁或电机应用。
直流电机驱动芯片L293与L298

直流电机驱动芯片L293与L298
一、
描述:L293电机驱动原理图
图片:L293,内部包含4通道逻辑驱动电路,除L293E为20脚,其它均为16脚,额定工作电流1A,最大可达1.5A,Vss最小4.5V,最大可达36V;Vs电压最大值也是36V,一般Vs电压应该比Vss电压高,否则有时会出现失控现象。
二、
L298比较常见的是15脚Multiwatt封装,带散热片,感觉主要是因为驱动电流大点。
L293普通双列直插,只是引脚比一般芯片粗点,另外293内置续流二极管,所以电路更简单点,初期我用的L298,后来换成293,也很稳定。
也不热。
实例一:用L298驱动两台直流减速电机的电路。
引脚A,B 可用于PWM控制。
如果机器人项目只要求直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制A,B即可实现直行、转弯、加减速等动作。
请楼主看下手册:如果从6脚输入PWM,“两个使能端”IN1和IN2都接高的话是刹车啊。
只有这两个一高一低电机才能动。
附加:
MEGA16+L298+直流电机小车完整电路图描述:小车完整电路图
图片:4传感器巡线循迹小车电路,在proteus中仿真过的...[font=楷体_GB2312][/font]RS232转CAN CAN转RS232 模块。
L293DH桥驱动集成电路引脚图及相关参数

L293DH桥驱动集成电路引脚图及相关参数
L293DH桥驱动集成电路引脚图及相关参数
L293D 是推挽式四通道H 桥驱动器(带二极管)。
输出电流600mA,每通道1.2A峰值输出电流每通道(不可重复,估计将会损坏)。
温度过高保护,使用简易,逻辑"0"输入电压为1.5V,可以免除1.5V以下的干扰。
这个设备适用于高达5KHz的开关应用。
L293D是16引脚塑料封装,中间的4个引脚是短路的(为了散热)。
最高工作电压为36V,最低工作电压为7V。
输入输出逻辑表及引脚图如下图1所示。
图1 L293D的引脚图与真值表
L293D 是单块集成电路,高电压,高电流,四通道驱动,设计用来接受DTL或者TTL逻辑电平,驱动感性负载(比如继电器,直流和步近马达),和开关电源晶体管。
简单的使用是作为2个桥,一对通道连接起来有一个使能输入。
分离的输入引脚提供某种逻辑,允许用低电压操作,并且还包括内置的钳位二极管。
L293D驱动两只直流电机的电路图
上图是使用L293D驱动两只直流电机的电路图。
L298电机驱动器引脚配置、规格参数及电路图
L298电机驱动器引脚配置、规格参数及电路图L298电机驱动器IC是一种单片芯片,用于电机驱动器模块以控制直流电机的速度。
目前,与L298相比,最常用的电机驱动IC是L293D和L2938N。
L298电机驱动器常用于遥控车和自动机器人,提供给电机驱动器模块的输入来自Arduino等控制器。
所以这个逻辑输入只是用来控制连接到电机驱动器IC的电机的方向。
电机驱动模块主要包括电机驱动IC,是该模块必不可少的组成部分。
这个单一的IC可以单独控制电机,但通过与Arduino接口使用电机驱动器模块可以使其变得简单。
基本介绍L298 IC的大功率版本是L293电机驱动器 IC,它是一种具有高电流和电压的双全桥驱动器IC,主要设计用于允许典型的TTL逻辑电平来控制不同的电感负载,如直流电机、螺线管、继电器、步进电机等。
此外,电机驱动器是一个小电流放大器,使用低电流信号提供高电流信号来驱动电动机。
L298 IC包含四个独立的功率放大器,其中两个放大器可以形成H桥A,另外两种放大器可以形成H桥B。
这里,一个H桥用于切换极性以控制电机方向,而一对H电桥用于控制双极步进电机。
该IC中的每个桥都包括两个电流检测引脚(如CSA和CSB)和使能引脚(如ENA和ENB)。
在这里,电流检测引脚连接到接地端子,但也可以包括一个低阻值电阻,其电压读数与电流相关。
同样,使能引脚也可用于同时激活所有输出。
与此同时,L298 IC中的所有使能和输入引脚都与5V TTL逻辑一起使用,以简化与不同类型微控制器的连接。
引脚配置L298双全桥驱动器IC的引脚配置包括15个引脚,包括双桥,即H桥A和H桥B。
•Pin1 (Current Sensing A):此引脚用于控制负载电流的流动。
•Pin2和3(输出1和2):这两个引脚是H桥A的输出引脚,其中电流供应整个负载,在引脚1处进行监控。
•Pin4 (VS):这是一个电压电源引脚,连接到+5V。
•Pin5和7 (Inputs1&2):桥A的控制输入和兼容TTL。
51单片机智能小车PWM调速前进程序源代码、电路原理图和器件表
51单片机智能小车PWM调速前进程序源代码、电路原理图、电路器件表从控制电路角度划分,智能小车电路板分为核心板和驱动板。
核心板上的处理器的芯片型号是:STC15W4K56S4,这是一款51单片机。
驱动板上有电源电路、电机驱动电路以及一些功能模块接口。
智能小车前进只要控制智能小车四个轮子向前转动就可以了。
智能小车四个轮子由四个直流减速电机驱动。
直流减速电机驱动芯片采用L293D,一片电机驱动芯片L293D可以驱动两个直流减速电机,智能小车用到4个直流减速电机,需要用到两片L293D电机驱动芯片。
但有时候我们需要控制智能小车的速度,不希望智能小车全速前进。
比如在“智能小车循迹实验”中,如果智能小车速度过快,来不及反应做出方向的调整,智能小车会很容易跑离轨迹,这样就需要调整控制智能小车的速度了。
那么怎么样实现智能小车前进速度的调节呢?调节智能小车的速度,实际上是调节电机的运转速度,PWM调速是目前电机的主流调速方式。
智能小车采用脉宽调制(PWM)的办法来控制电机的转速,从而控制智能小车的速度。
在此种情况下,电池电源并非连续地向直流电机供电,而是在一个特定的频率下为直流电机提供电能。
不同占空比的方波信号,调节对直流电机的通断电,能起到对直流电机调速作用。
这是因为电机实际上是一个大电感,它有阻碍输入电流和电压突变的能力,因此脉冲输入信号被平均分配到作用时间上。
这样,改变L293D使能端EN1和EN2上输入方波的占空比就能改变加在电机两端的电压大小,从而改变了直流电机转速。
智能小车PWM调速前进程序如下:首先,定义了2个变量,这2个变量用于设置智能小车的速度。
unsigned char pwmval_left_init=6; //调节此值可以调节小车的速度。
unsigned char pwmval_right_init=6; //调节此值可以调节小车的速度。
通过以下函数初始化定时器0,每1毫秒中断一次。
void Timer0_Init(void) //定时器0初始化{TMOD=0x01;TH0=0xf8;TL0=0xcd;TR0=1;ET0=1;EA=1;}下面我们看定时器0的中断处理函数。
电机驱动芯片资料 L293 L298N

在自制机器人的时候,选择一个合适的驱动电路也是非常重要的,本文详细介绍了几种常用的机器人驱动芯片。
介绍几种机器人驱动芯片(注:本文已经投稿至《电子制作》)在自制机器人的时候,选择一个合适的驱动电路也是非常重要的。
最初,通常选用的驱动电路是由晶体管控制继电器来改变电机的转向和进退,这种方法目前仍然适用于大功率电机的驱动,但是对于中小功率的电机则极不经济,因为每个继电器要消耗20~100mA的电力。
当然,我们也可以使用组合三极管的方法,但是这种方法制作起来比较麻烦,电路比较复杂,因此,我在此向大家推荐的是采用集成电路的驱动方法:马达专用控制芯片LG9110芯片特点:低静态工作电流;宽电源电压范围:2.5V-12V ;每通道具有800mA 连续电流输出能力;较低的饱和压降;TTL/CMOS 输出电平兼容,可直接连CPU ;输出内置钳位二极管,适用于感性负载;控制和驱动集成于单片IC 之中;具备管脚高压保护功能;工作温度:0 ℃-80 ℃。
描述:LG9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC之中,使外围器件成本降低,整机可靠性提高。
该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过750 ~800mA 的持续电流,峰值电流能力可达1.5 ~2.0A ;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。
LG9110 被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。
管脚定义:1 A 路输出管脚、2和3 电源电压、4 B 路输出管脚、5和8 地线、6 A 路输入管脚、7 B 路输入管脚2、恒压恒流桥式1A驱动芯片L293图2是其内部逻辑框图图3是其与51单片机连接的电路原理图L293是著名的SGS公司的产品,内部包含4通道逻辑驱动电路。
l293D电机驱动资料

D Peak Output Current 2 A Per Channel (1.2 A for L293D)DOutput Clamp Diodes for Inductive Transient Suppression (L293D)description/ordering informationThe L293 and L293D are quadruple high-current half-H drivers. The L293 is designed to provide bidirectional drive currents of up to 1 A at voltages from 4.5 V to 36 V. The L293D is designed to provide bidirectional drive currents of up to 600-mA at voltages from 4.5 V to 36 V. Both devices are designed to drive inductive loads such as relays, solenoids, dc and bipolar stepping motors, as well as other high-current/high-voltage loads in positive-supply applications.All inputs are TTL compatible. Each output is a complete totem-pole drive circuit, with a Darlington transistor sink and a pseudo-Darlington source. Drivers are enabled in pairs, with drivers 1 and 2 enabled by 1,2EN and drivers 3 and 4enabled by 3,4EN. When an enable input is high, the associated drivers are enabled, and their outputs are active and in phase with their inputs. When the enable input is low, those drivers are disabled, and their outputs are off and in the high-impedance state. With the proper data inputs, each pair of drivers forms a full-H (or bridge)reversible drive suitable for solenoid or motor applications.ORDERING INFORMATIONT APACKAGE †ORDERABLEPART NUMBER TOP-SIDE MARKING HSOP (DWP)Tube of 20L293DWP L293DWP C to 70PDIP (N)Tube of 25L293N L293N 0°C to 70°C PDIP (NE)Tube of 25L293NE L293NE PDIP (NE)Tube of 25L293DNEL293DNE†Package drawings, standard packing quantities, thermal data, symbolization, and PCB design guidelines are available at /sc/package.PRODUCTION DATA information is current as of publication date.Products conform to specifications per the terms of Texas Instruments standard warranty. Production processing does not necessarily include testing of all parameters.Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.123456789101112131428272625242322212019181716151,2EN1A 1Y NC NC NCNC NC 2Y 2A V CC2V CC14A 4Y NC NC NCNC NC 3Y 3A 3,4ENL293...DWP PACKAGE(TOP VIEW)HEAT SINK AND GROUND HEAT SINK AND GROUNDdescription/ordering information (continued)On the L293, external high-speed output clamp diodes should be used for inductive transient suppression.A V CC1 terminal, separate from V CC2, is provided for the logic inputs to minimize device power dissipation.The L293and L293D are characterized for operation from 0°C to 70°C.block diagramV CC2V CC1NOTE: Output diodes are internal in L293D.FUNCTION TABLE(each driver)INPUTS†A EN OUTPUTYH H HL H LX L ZH = high level, L = low level, X = irrelevant, Z = high impedance (off)†In the thermal shutdown mode, the output is in the high-impedance state, regardless of the input levels.logic diagram1A 1,2EN2A3A 3,4EN4A 1Y 2Y 3Y 4Yschematics of inputs and outputs (L293)InputV CC2OutputGND TYPICAL OF ALL OUTPUTSEQUIVALENT OF EACH INPUT V CC1CurrentSourceGNDschematics of inputs and outputs (L293D)InputV CC2OutputGND TYPICAL OF ALL OUTPUTSEQUIVALENT OF EACH INPUTV CC1CurrentSourceGNDabsolute maximum ratings over operating free-air temperature range (unless otherwise noted)†Supply voltage, V CC1(see Note 1) 36 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Output supply voltage, V CC236 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Input voltage, V I7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Output voltage range, V O −3V toV CC2 + 3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Peak output current, I O (nonrepetitive, t ≤ 5 ms): L293 ±2 A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Peak output current, I O (nonrepetitive, t ≤ 100 µs): L293D ±1.2 A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Continuous output current, I O: L293 ±1 A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Continuous output current, I O: L293D ±600 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Package thermal impedance, θJA (see Notes 2 and 3):DWP package TBD°C/W. . . . . . . . . . . . . . . . . . . . . . .N package 67°C/W. . . . . . . . . . . . . . . . . . . . . . . . . . . .NE package TBD°C/W. . . . . . . . . . . . . . . . . . . . . . . . .Maximum junction temperature, T J 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Storage temperature range, T stg −65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .†Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, andfunctional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is notimplied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.NOTES: 1.All voltage values are with respect to the network ground terminal.2.Maximum power dissipation is a function of T J(max), q JA, and T A. The maximum allowable power dissipation at any allowableambient temperature is P D = (T J(max) − T A)/q JA. Operating at the absolute maximum T J of 150°C can affect reliability.3.The package thermal impedance is calculated in accordance with JESD 51-7.recommended operating conditionsMIN MAX UNITSupply voltage V CC1 4.57Supply voltageV CC2V CC136VHigh level input voltage V CC1≤ 7 V 2.3V CC1VV IH High-level input voltageV CC1≥ 7 V 2.37VV IL Low-level output voltage−0.3† 1.5VT A Operating free-air temperature070°C†The algebraic convention, in which the least positive (most negative) designated minimum, is used in this data sheet for logic voltage levels. electrical characteristics, V CC1 = 5 V, V CC2 = 24 V, T A = 25°CPARAMETER TEST CONDITIONS MIN TYP MAX UNITV OH High-level output voltage L293: I OH = −1 AL293D: I OH = −0.6 AV CC2 − 1.8V CC2 − 1.4VV OL Low-level output voltage L293: I OL= 1 AL293D: I OL = 0.6 A1.2 1.8VV OKH High-level output clamp voltage L293D: I OK = −0.6 A V CC2+1.3V V OKL Low-level output clamp voltage L293D: I OK = 0.6 A 1.3VHigh level input current A7V0.2100I IH High-level input currentEN V I = 7 V0.210µALow level input current A−3−10I IL Low-level input currentEN V I = 0−2−100µA All outputs at high level1322I= 0All outputs at low level3560I CC1Logic supply current O 0All outputs at high impedance824mAAll outputs at high level1424I Output supply current I = 0All outputs at low level26mA CC2p pp y OAll outputs at high impedance24 switching characteristics, V CC1 = 5 V, V CC2 = 24 V, T A = 25°CTEST CONDITIONS L293NE, L293DNEPARAMETER TEST CONDITIONSMIN TYP MAXUNIT t PLH Propagation delay time, low-to-high-level output from A input800nst PHL Propagation delay time, high-to-low-level output from A input=30pF See Figure1400nst TLH Transition time, low-to-high-level output C L = 30 pF, See Figure 1300nst THL Transition time, high-to-low-level output300nsswitching characteristics, V CC1 = 5 V, V CC2 = 24 V, T A = 25°CL293DWP, L293NL293DNPARAMETER TEST CONDITIONSMIN TYP MAXUNIT t PLH Propagation delay time, low-to-high-level output from A input750nst PHL Propagation delay time, high-to-low-level output from A input=30pF See Figure1200nst TLH Transition time, low-to-high-level output C L = 30 pF, See Figure 1100nst THL Transition time, high-to-low-level output350nsPARAMETER MEASUREMENT INFORMATIONTEST CIRCUITOH VOLTAGE WAVEFORMSOLNOTES: A.C L includes probe and jig capacitance.B.The pulse generator has the following characteristics: t r≤ 10 ns, t f≤ 10 ns, t w = 10 µs, PRR = 5 kHz, Z O = 50 Ω.Figure 1. Test Circuit and Voltage WaveformsAPPLICATION INFORMATION24 V5 V10 k ΩV CC1V CC2Control AControl B4, 5, 12, 13GNDThermal ShutdownMotor1683611144Y 3Y 2Y 1Y 1,2EN1A 2A 3,4EN3A 4A 15109721Figure 2. Two-Phase Motor Driver (L293)APPLICATION INFORMATION24 V5 V10 k ΩV CC1V CC21681,2EN11A 22A 73,4EN93A 104A 15Control AControl B4, 5, 12, 13GNDThermal ShutdownMotor1Y 32Y 63Y 114Y 14Figure 3. Two-Phase Motor Driver (L293D)APPLICATION INFORMATIONEN3A M14A M2H H Fast motor stopH RunH L RunL Fast motor stop LXFree-running motorstopXFree-running motor stopL = low, H = high, X = don’t careEN 1A 2A FUNCTIONH L H Turn rightH H L Turn left H L LFast motor stop H H H Fast motor stop LXXFast motor stopL = low, H = high, X = don’t careV CC2Figure 4. DC Motor Controls (connections to ground and tosupply voltage)GNDV CC2V CC1ENFigure 5. Bidirectional DC Motor ControlGNDAPPLICATION INFORMATION0.22V CC2D1−D8 = SES5001Figure 6. Bipolar Stepping-Motor Controlmounting instructionsThe Rthj-amp of the L293 can be reduced by soldering the GND pins to a suitable copper area of the printed circuit board or to an external heat sink.Figure 9 shows the maximum package power P TOT and the θJA as a function of the side of two equal square copper areas having a thickness of 35 µm(see Figure 7). In addition, an external heat sink can be used (see Figure 8).During soldering, the pin temperature must not exceed 260°C, and the soldering time must not exceed 12 seconds.The external heatsink or printed circuit copper area must be connected to electrical ground.L293, L293D QUADRUPLE HALF-H DRIVERS SLRS008C − SEPTEMBER 1986 − REVISED NOVEMBER 200411POST OFFICE BOX 655303 • DALLAS, TEXAS 75265APPLICATION INFORMATIONFigure 7. Example of Printed Circuit Board Copper Area(used as heat sink)Figure 8. External Heat Sink Mounting Example (θJA = 25°C/W)L293, L293D QUADRUPLE HALF-H DRIVERS SLRS008C − SEPTEMBER 1986 − REVISED NOVEMBER 200412POST OFFICE BOX 655303 •DALLAS, TEXAS 75265APPLICATION INFORMATION310201020P 4MAXIMUM POWER AND JUNCTIONvsTHERMAL RESISTANCE 30T O T − P o w e r D i s s i p a t i o n − W 602004080θJ A − T h e r m a l R e s i s t a n c e −°C /W 40Side − mm Figure 95053102−500504MAXIMUM POWER DISSIPATION vs AMBIENT TEMPERATURE100T A − Ambient Temperature −°CFigure 10150P T O T − P o w e r D i s s i p a t i o n − WPACKAGING INFORMATIONOrderable Device Status (1)Package Type PackageDrawing Pins Package Qty Eco Plan (2)Lead/Ball FinishMSL Peak Temp (3)Samples(Requires Login)L293DDWP OBSOLETE SOIC DW28TBD Call TI Call TI Samples Not Available L293DDWPTR OBSOLETE SOIC DW28TBD Call TI Call TI Samples Not Available L293DN OBSOLETE PDIP N16TBD Call TI Call TI Samples Not Available L293DNE ACTIVE PDIP NE1625Pb-Free (RoHS)CU NIPDAU N / A for Pkg Type Contact TI Distributoror Sales Office L293DNEE4ACTIVE PDIP NE1625Pb-Free (RoHS)CU NIPDAU N / A for Pkg Type Contact TI Distributoror Sales Office L293DSP OBSOLETE16TBD Call TI Call TI Samples Not Available L293DSP883B OBSOLETE16TBD Call TI Call TI Samples Not Available L293DSP883C OBSOLETE UTR TBD Call TI Call TI Samples Not Available L293DWP OBSOLETE SOIC DW28TBD Call TI Call TI Replaced by L293DNE L293DWPG4OBSOLETE SOIC DW28TBD Call TI Call TI Replaced by L293DNE L293DWPTR OBSOLETE SO PowerPAD DWP28TBD Call TI Call TI Samples Not Available L293N OBSOLETE PDIP N16TBD Call TI Call TI Replaced by L293DNE L293NE ACTIVE PDIP NE1625Pb-Free (RoHS)CU NIPDAU N / A for Pkg Type Contact TI Distributoror Sales Office L293NEE4ACTIVE PDIP NE1625Pb-Free (RoHS)CU NIPDAU N / A for Pkg Type Contact TI Distributoror Sales Office L293NG4OBSOLETE PDIP N16TBD Call TI Call TI Replaced by L293DNE(1) The marketing status values are defined as follows:ACTIVE: Product device recommended for new designs.LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in a new design.PREVIEW: Device has been announced but is not in production. Samples may or may not be available.OBSOLETE: TI has discontinued the production of the device.(2) Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check /productcontent for the latest availability information and additional product content details.TBD: The Pb-Free/Green conversion plan has not been defined.Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS compatible) as defined above.Addendum-Page 1Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)(3) MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder temperature.Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited information may not be available for release.In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI to Customer on an annual basis.Addendum-Page 2IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAmplifiers Audio /audioData Converters Automotive /automotiveDLP®Products Communications and /communicationsTelecomDSP Computers and /computersPeripheralsClocks and Timers /clocks Consumer Electronics /consumer-appsInterface Energy /energyLogic Industrial /industrialPower Mgmt Medical /medicalMicrocontrollers Security /securityRFID Space,Avionics&/space-avionics-defenseDefenseRF/IF and ZigBee®Solutions /lprf Video and Imaging /videoWireless /wireless-appsMailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2010,Texas Instruments Incorporated。
详解直流电机驱动电路设计

直流电机(direct current machine)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
它是能实现直流电能和机械能互相转换的电机。
当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。
直流电机的基本构成直流电机由定子和转子两部分组成,其间有一定的气隙。
直流电机的定子由机座、主磁极、换向磁极、前后端盖和刷架等部件组成。
其中主磁极是产生直流电机气隙磁场的主要部件,由永磁体或带有直流励磁绕组的叠片铁心构成。
直流电机的转子则由电枢、换向器(又称整流子)和转轴等部件构成。
其中电枢由电枢铁心和电枢绕组两部分组成。
电枢铁心由硅钢片叠成,在其外圆处均匀分布着齿槽,电枢绕组则嵌置于这些槽中。
换向器是一种机械整流部件。
由换向片叠成圆筒形后,以金属夹件或塑料成型为一个整体。
各换向片间互相绝缘。
换向器质量对运行可靠性有很大影响。
直流电机的组成结构直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
01定子主磁极主磁极的作用是产生气隙磁场。
主磁极由主磁极铁心和励磁绕组两部分组成铁心一般用0.5mm~1.5mm厚的硅钢板冲片叠压铆紧而成,分为极身和极靴两部分,上面套励磁绕组的部分称为极身,下面扩宽的部分称为极靴,极靴宽于极身,既可以调整气隙中磁场的分布,又便于固定励磁绕组。
励磁绕组用绝缘铜线绕制而成,套在主磁极铁心上。
整个主磁极用螺钉固定在机座上。
换向极换向极的作用是改善换向,减小电机运行时电刷与换向器之间可能产生的换向火花,一般装在两个相邻主磁极之间,由换向极铁心和换向极绕组组成。
最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)
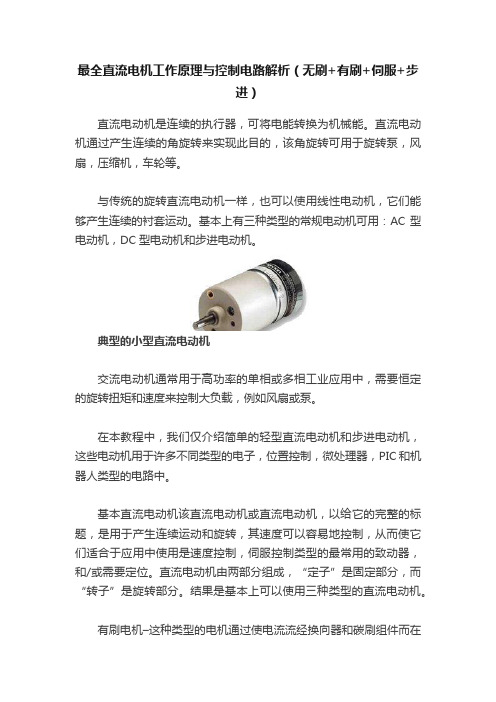
最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)直流电动机是连续的执行器,可将电能转换为机械能。
直流电动机通过产生连续的角旋转来实现此目的,该角旋转可用于旋转泵,风扇,压缩机,车轮等。
与传统的旋转直流电动机一样,也可以使用线性电动机,它们能够产生连续的衬套运动。
基本上有三种类型的常规电动机可用:AC型电动机,DC型电动机和步进电动机。
典型的小型直流电动机交流电动机通常用于高功率的单相或多相工业应用中,需要恒定的旋转扭矩和速度来控制大负载,例如风扇或泵。
在本教程中,我们仅介绍简单的轻型直流电动机和步进电动机,这些电动机用于许多不同类型的电子,位置控制,微处理器,PIC和机器人类型的电路中。
基本直流电动机该直流电动机或直流电动机,以给它的完整的标题,是用于产生连续运动和旋转,其速度可以容易地控制,从而使它们适合于应用中使用是速度控制,伺服控制类型的最常用的致动器,和/或需要定位。
直流电动机由两部分组成,“定子”是固定部分,而“转子”是旋转部分。
结果是基本上可以使用三种类型的直流电动机。
有刷电机–这种类型的电机通过使电流流经换向器和碳刷组件而在绕线转子(旋转的零件)中产生磁场,因此称为“有刷”。
定子(静止部分)的磁场是通过使用绕制的定子励磁绕组或永磁体产生的。
通常,有刷直流电动机便宜,体积小且易于控制。
无刷电动机–这种电动机通过使用附着在其上的永磁体在转子中产生磁场,并通过电子方式实现换向。
它们通常比常规的有刷型直流电动机更小,但价格更高,因为它们在定子中使用“霍尔效应”开关来产生所需的定子磁场旋转顺序,但是它们具有更好的转矩/速度特性,效率更高且使用寿命更长比同等拉丝类型。
伺服电动机–这种电动机基本上是一种有刷直流电动机,带有某种形式的位置反馈控制连接到转子轴。
它们连接到PWM型控制器并由其控制,主要用于位置控制系统和无线电控制模型。
普通的直流电动机具有几乎线性的特性,其旋转速度取决于所施加的直流电压,输出转矩则取决于流经电动机绕组的电流。
如何设计一个简单的电机驱动电路
如何设计一个简单的电机驱动电路电机作为现代工业和生活中常见的设备之一,广泛用于各种电力驱动系统中。
一个简单而高效的电机驱动电路设计对于电机的正常运行和性能发挥至关重要。
本文将介绍如何设计一个简单的电机驱动电路,以实现对电机的可靠控制。
一、电机驱动电路的作用电机驱动电路的主要作用是根据输入信号控制电机的启停、转向和转速等参数。
通过适当的设计,可以保证电机运行平稳、高效,并减少电机损耗。
一个简单的电机驱动电路通常包括功率电源、电机驱动芯片和外围电路等部分。
二、电机驱动电路的基本原理在设计电机驱动电路之前,我们需要了解一些基本的电机驱动原理。
1. 电机类型和特性:根据不同的应用和变量,常见的电机类型有直流电机(DC Motor)、交流电机(AC Motor)和步进电机(Stepper Motor)等。
不同类型的电机具有不同的特性,例如直流电机具有简单、易控制的优点,而交流电机适用于高功率和高效率的应用。
2. 电机驱动方式:电机驱动方式可分为直接驱动和间接驱动两种。
直接驱动是指电机直接与电源相连,通过改变电源电压或电流来控制电机的转速和方向。
间接驱动是指通过驱动器或控制器来控制电机的转速和方向。
3. 电机驱动电路稳定性:电机驱动电路的稳定性非常重要,可以通过控制环路的设计来保证。
一个稳定的电机驱动电路可以提高电机的响应速度和性能。
三、简单电机驱动电路的设计步骤下面我们将以直流电机为例,介绍如何设计一个简单的电机驱动电路。
1. 电源设计:选择适当的电源电压和电流,根据电机的额定参数来确定电源规格。
为了保证电机的正常运行,电源的输出应具有稳定性和低噪声。
2. 电机驱动芯片选择:根据电机类型和应用需求,选择适合的电机驱动芯片。
常见的电机驱动芯片有L298、L293D等,这些芯片具有较高的可靠性和输出功率。
3. 电机驱动电路设计:根据电机驱动芯片的数据手册和设计规范,设计电机驱动电路。
电路通常包括电源滤波电路、电机驱动芯片控制电路和保护电路等部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我没有自己设计电路来实现“H”桥,而是决定查找一种商用的解决方案。
本应用
选择了Unitrode的“293D”电机驱动芯片,因为它连接简单,而且能够控制在各种电
压下向电机、继电器或其他磁性元件提供最大2安培的电流。
图12-8没有实际画出293D的引出线,以“H“桥连接方式,通过将电机的两个导
线连接在芯片的各半边,能够使用293D来控制电机。
第一个也许也是最重要的一项功能是4各驱动器中的每一个都有嵌位二极管来抑制
电机关断时的反EMF。
这一点很重要,因为在驱动器关闭时,所有的磁性元件都会产
生大的电压尖峰信号。
这些大的尖峰信号是由电流断开时正在消失的磁场引起的。
因此,在线圈的两端接一个二极管,以便防止这些反EMF干扰或者损坏任何的电子元件。
293D的另一个特性是每个驱动器有一个允许信号。
不必修改驱动器控制部分,就
能够使用这些信号实现脉宽调制(PWM)速度控制。
293D的晶体管控制会在芯片内产生1.5V的压降,也就是说,如果想让机器人电机
工作在1.5V,因此使用两个1.5V电池串联来控制完全没有问题。
最后一个特点是该芯片能够控制和传递给驱动器的电压范围宽。
对于大电流应用系统,安装该芯片的印制板应该是293D地线引脚周围设计大的散热区。
这个区域能够
为该芯片提供更多的铜,以便让电流产生的热辐射出去。
使用293D,能够建立图12-9所示的电路来控制墙角老鼠的两个电机。
这个电路是
后面的5各应用示例的基础。
后面将只说明硬件的增强以及它们如何与AT89C2051连接,而不是在此电路的基础上添加。
——飘风抄自《精通80C51程序设计》【Myke Predko编著,田玉敏等译】,这本书里面的语言是汇编语言,以美语为母语的人说汇编就跟我们说成语似的。
兄弟啊,出个人吧,编本以汉子为基础的程序语言吧。
那样的话,中华的技术爱好者比例
将超过60%。
而你。
会获得大量的财富的。
中华人会感激你一辈子的。
L293D,额在长春的电子市场买的,价格是10块钱一个。