电动摩托车用电动机及其控制器(报批稿)
非道路电动车辆电机控制器通用技术要求及试验方法
非道路电动车辆电机控制器通用技术要求及试验方法非道路电动车辆电机控制器是非道路推土机、叉车、堆高机等产品的核心部件,其性能和质量直接影响着车辆的动力系统和使用寿命。
因此,制定并遵守一系列通用技术要求及试验方法是非常重要的。
非道路电动车辆电机控制器的技术要求包括但不限于以下几个方面:1. 高效率和变速范围:电机控制器应具备高效能转换能力,以保证车辆具备良好的加速性能和高速驱动能力;同时还应支持多段变速,灵活适应不同工况需求。
2. 高可靠性和稳定性:电机控制器应具备良好的抗干扰能力,能够适应车辆在各种复杂环境和工况下的正常运行;同时还应具备过流、过温、过压等保护功能,以确保车辆及其驾乘人员的安全。
3. 自动识别和系统监测:电机控制器应具备自动识别电机类型和参数的功能,并能根据实际情况自动调整电机工作状态;同时还应具备系统监测功能,及时发现故障并采取相应措施,保证车辆的稳定运行。
针对非道路电动车辆电机控制器的试验方法可以根据以下几个方面进行评估:1. 效能测试:通过对电机控制器的转换效率和输出功率进行测量,评估其能量利用效率和输出性能。
2. 环境适应性测试:在极端气候条件下,检测电机控制器的工作性能和稳定性,评估其在不同温度、湿度和海拔等环境下的适应能力。
3. 故障保护测试:模拟电机控制器可能遇到的过流、过温、过压等故障情况,检验其保护功能的可靠性和响应速度。
制定非道路电动车辆电机控制器通用技术要求及试验方法的目的在于确保电机控制器的质量和性能,为非道路电动车辆的运行提供可靠保障。
只有符合规定要求的电机控制器才能获得认证,并在市场上合法销售和使用。
这将有助于推动非道路电动车辆行业的发展,并提高产品的竞争力和可持续性。
非道路电动车辆电机控制器通用技术要求及试验方法的制定是非常必要的,它能够规范电机控制器的生产和使用,提高产品的质量和可靠性,为用户提供更好的使用体验。
同时,加强监管和执行,确保规范的实施,将为非道路电动车辆行业的可持续发展提供良好保障。
电动摩托车用无刷直流电动机控制器设计
罩
2 2
De i n fBr s e s DC o o n r l r f r El c rc M o o c ce sg o u hls M t r Co t ol o e t i e t r y l
WA G C n, u — ig L i N a MAR i qn , I n j£ T N B L g— um,A o
维普资讯
触 持电棚 27 第 期 0年 3 O
… 一… … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … … - c, / /
驱 控
! 争 … 一
电动摩 托 车 用 无 刷 直 流 电动 机 控 制器 设 计
车连续 调速的要求 。
( 西北工业大学 , 陕西西安 7 0 7 ) 10 2
吾
童 童
关键词 : 开关 电源 ; 无刷直 流电动机 ; 电流截止 负反馈 ;WM P 中图分类号 : M3 T 3 文献标识码 : A 文章 编号 :04— 08 2 0 )3一 0 5— 3 10 7 1 (0 7 0 o2 0
暑
( otw s r o t h i l nv r t, in7 0 7 ,C ia N r et nP l e nc i sy X h 1 0 2 hn ) h e yc aU ei
Ab t a t A B DCM o t l rwh c S c mp s d o w th p w r s p l , W M d lt g c i s ta d h r w r sr c : L c n r l ih Wa o o e f s i o e u p y P oe c mo u ai hp e n a d a e n lgc g ts cr u t wee i t d c d, n h t rc n r l rwa s d t o t lee t c mo oc ce w t ih —p w ro t o i a e i i r n r u e a d t e mo o o t l s u e o c nr lcr tr y l i h g c s o oe o i h o e u・ p t . h y tm d p s d s me o e us T es s e a o te o v r—c r n ,o e —v l g r tc in a d c re tc t—o e b c i ut o i r v u r t v r ot e p oe t n u n u e a o f f d a k cr i t mp o e e c s
电动摩托车用小型电机的种类、特性介绍
For personal use only in study and research; notfor commercial useFor personal use only in study and research; notfor commercial use电动摩托车用小型电机的种类、特性报告电动机是电动摩托车的一个重要部件,目前在电动摩托车驱动领域,主要有直流电动机驱动系统、交流永磁电动机驱动系统和开关磁阻电动机驱动系统应用范围比交广泛。
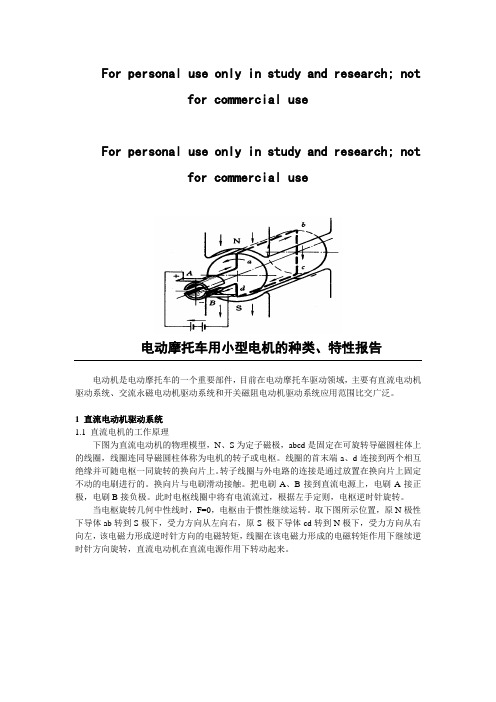
1 直流电动机驱动系统1.1 直流电机的工作原理下图为直流电动机的物理模型,N、S为定子磁极,abcd是固定在可旋转导磁圆柱体上的线圈,线圈连同导磁圆柱体称为电机的转子或电枢。
线圈的首末端a、d连接到两个相互绝缘并可随电枢一同旋转的换向片上。
转子线圈与外电路的连接是通过放置在换向片上固定不动的电刷进行的。
换向片与电刷滑动接触。
把电刷A、B接到直流电源上,电刷A接正极,电刷B接负极。
此时电枢线圈中将有电流流过,根据左手定则,电枢逆时针旋转。
当电枢旋转几何中性线时,F=0,电枢由于惯性继续运转。
取下图所示位置,原N极性下导体ab转到S极下,受力方向从左向右,原S 极下导体cd转到N极下,受力方向从右向左,该电磁力形成逆时针方向的电磁转矩,线圈在该电磁力形成的电磁转矩作用下继续逆时针方向旋转,直流电动机在直流电源作用下转动起来。
1.2 直流电机的数学方程 1.2.1 电枢中感应电动势电枢中通入直流电流后,产生电磁转矩,使电机在磁场中转动。
而通电线圈在磁场中转动,又会在线圈中产生感应电动势E 。
感应电动势为:n K EE φ=式中,K E ——与电机结构相关的参数; Φ——电机每极磁通量,Wb ; n ——电机转速,r/min 。
1.2.2 电枢电压方程如图所示,a a R I E U += 式中,U ——外接电源电压,V ; I a ——电枢电流,A ; R a ——电枢电阻,Ω。
XR 1141.13-2010 电动车用控制器(已发布)
的规定。
表7
V
控制器的额定输入电压
36
48
60
64
72
80
控制器欠压保护值
32.5
43.5
53.5
57.5
64.5
72.5
4.13.3 过流保护功能 当控制器电流超过规定值时,控制器应能自动限流,限流值应不大于电动机额定电流的 3 倍。控制
器过流保护值应符合双方共同确认的技术标准或产品技术条件的规定。 4.13.4 制动断电功能
控制器应能在制动时自动切断电源电流,其有效性为 100%;输入给控制器的刹车断电信号为低电 平有效。 4.13.5 堵转保护功能
控制器在电机堵转情况下,5 秒内应自动切断电源电流。 4.13.6 相间短路保护功能
当电动机的相线有两根发生短路时,控制器在 1 秒内应自动控制电动机停止转动。 4.13.7 防飞车保护功能 4.13.7.1 启动时防飞车功能
编制
制定单位 审核
会签单位
批准
年月日
2
Q/XR 1141.13-2010
电动车用控制器
1 范围
本标准规定了电动车用控制器的型号命名、要求、试验方法、检验规则、标志、包装、运输、贮存。 本标准适用于电动自行车及电动轻便摩托车用控制器。
2 规范性引用文件
下列文件中的条款通过本标准的引用而成为本标准的条款,凡是注日期的引用文件,其随后所有的 修改单(不包括勘误表)或修订版均不适用于本标准。凡是不注日期的引用文件,其最新版本适用于本 标准。
GB/T 191 包装储运图示标志 GB/T 2423.5 电工电子产品环境试验 第 2 部分:试验方法 试验 Ea 和导则:冲击 GB/T 2423.10 电工电子产品环境试验 第 2 部分:试验方法 试验 Fc 和导则:振动 GB/T 4208 外壳防护等级(IP 代码) JB/T 8139 公路车辆用低电压电缆(电线) Q/XR 1141.8 电动车 接插器
电动车控制器
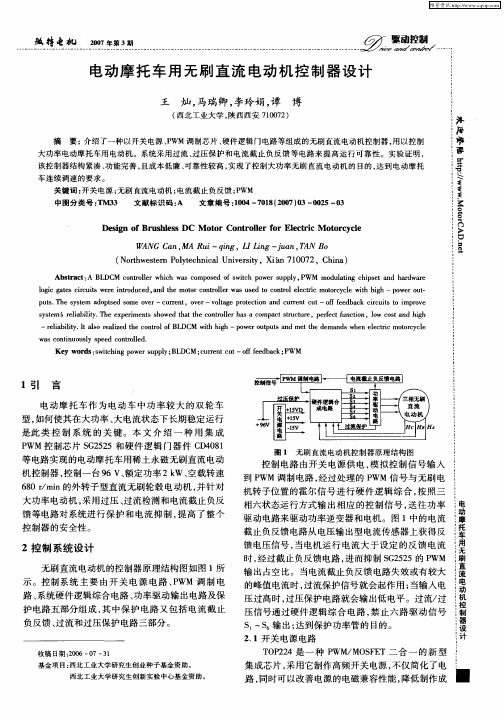
控制电路主要包括以下几部分:控制芯片及其驱动系统、AD采样系统、功率模块及其驱动系统、硬件保护系 统、位置检测系统、母线支撑电容等。
谢谢观看
功率主回路采用三相逆变全桥,其中主功率开关器件为IGBT。在大电流、高频开关状态下,从电解电容到功 率开关模块的杂散电感对功率回路的能耗、模块上的尖峰电压影响较大,因而采用层叠式母线基板使电路的杂散 电感尽可能小,以适应控制系统低电压、大电流工作的特点。
失效原因
失效原因
电动自行车有很多不起眼,但是很重要的小部件而电ቤተ መጻሕፍቲ ባይዱ自行车控制器就是其中之一。别看控制器不起眼,但 是你的电动自行车的启动、进退、停止可全靠它了。那么是那些原因能导致电动车控制器的失效呢?
1、功率器件损坏; 功率器件的损坏,一般有以下几种可能:电机损坏引起的;功率器本身的质量差或选用等级不够引起的;器 件安装或振动松动引起的;电机过载引起的;功率器件驱动电路损坏或参数设计不合理引起的。 2、控制器内部供电电源损坏; 控制器内部电源的损坏,一般有以下几种可能:控制器内部电路短路;外围控制部件短路;外部引线短路。 3、控制器工作时断时续; 控制器工作起来时断时续,一般有以下几种可能:器件本身在高温或低温环境下参数漂移;控制器总体设计 功耗大导致某些器件局部温度过高而使器件本身进入保护状态;接触不良。 4、连接线磨损及接插件不良或脱落引起控制信号丢失。
第一步,功能定义和离线仿真。首先根据应用需要明确控制器应该具有的功能,为硬件设计提供基础;然后 基础Matlab建立整个控制系统的仿真模型,并进行离线仿真,运用软件仿真的方法设计和验证控制策略。
电动自行车控制器电路及原理大全
电动自行车控制器电路及原理大全目前流行的电动自行车、电动摩托车大都使用直流电机,对直流电机调速的控制器有很多种类。
电动车控制器核心是脉宽调制(PWM)器,而一款完善的控制器,还应具有电瓶欠压保护、电机过流保护、刹车断电、电量显示等功能。
电动车控制器以功率大小可分为大功率、中功率、小功率三类。
电动自行车使用小功率的,货运三轮车和电摩托要使用中功率和大功率的。
从配合电机分,可分为有刷、无刷两大类。
关于无刷控制器,受目前的技术和成本制约,损坏率较高。
笔者认为,无刷控制器维修应以生产厂商为主。
而应用较多的有刷控制器,是完全可以用同类控制器进行直接代换或维修的。
本文分别介绍国内部分具有代表性的电动自行车控制器整机电路,并指出与其他产品的不同之处及其特点。
所列电路均是根据实物进行测绘所得,图中元件号为笔者所标。
通过介绍具体实例,达到举一反三的目的。
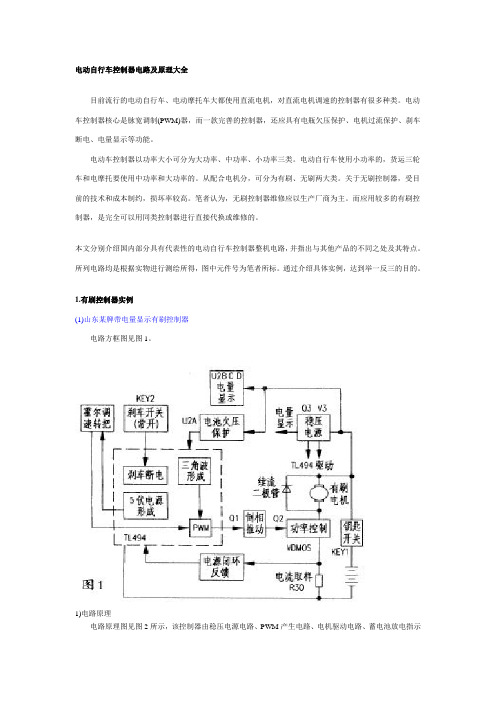
1.有刷控制器实例(1)山东某牌带电量显示有刷控制器电路方框图见图1。
1)电路原理电路原理图见图2所示,该控制器由稳压电源电路、PWM产生电路、电机驱动电路、蓄电池放电指示电路、电机过流及蓄电池过放电保护电路等组成。
稳压电源由V3(TL431),Q3等元件组成,从36V蓄电池经过串联稳压后得到+12V电压,给控制电路供电,调节VR6可校准+12V电源。
PWM电路以脉宽调制器TL494为核心组成。
R3、C4与内部电路产生振荡,频率大约为12kHz。
H是高变低型霍尔速度控制转把,由松开到旋紧时,其输出端可得到4V—1V的电压。
该电压加到TL494的②脚,与①脚电压进行比较,在⑧脚得到调宽脉冲。
②脚电压越低,⑧脚输出的调宽脉冲的低电平部分越宽,电机转速越高,电位器VR2用于零速调节,调节VR2使转把松开时电机停转再过一点。
电机驱动电路由Q1、Q2、Q4等元件组成。
电机MOTOR为永磁直流有刷电机。
TL494的⑧脚输出的调宽脉冲,经Q1反相放大驱动VDMOS管Q2。
TL494的⑧脚输出的调宽脉冲低电平部分越宽,则Q2导通时间越长,电机转速越高。
浅析电动摩托车(自行车)的电路图与工作原理
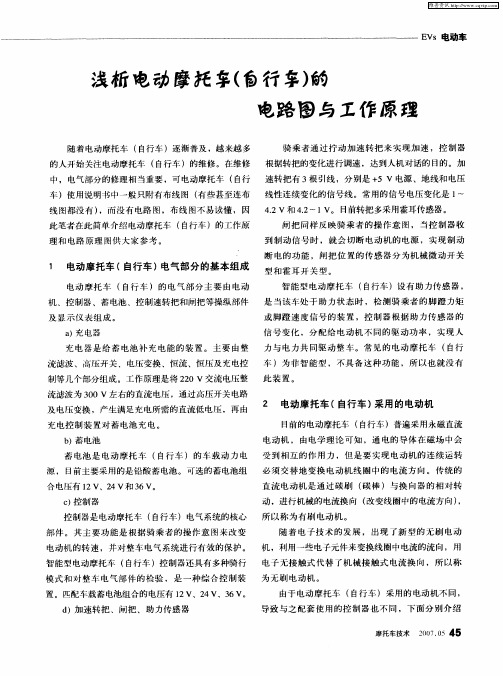
. .~1 V。 线 图都没 有 ) ,而没 有 电路 图 ,布线 图不易读懂 ,因 42V和 42 目前转把多采用霍耳传感器 。 此笔者在此 简单介绍 电动摩 托车 ( 自行 车 )的工作原 理和 电路原 理 图供大 家参 考 。 闸把 同样 反映 骑 乘 者的 操作 意 图 , 当控 制器收 到 制 动信号 时 ,就 会切 断 电动 机 的 电源 ,实现 制 动 断 电的 功 能 ,闸把 位 置的 传感 器分 为机 械微 动 开关
及 显脚蹬 速 度信 号 的装 置 ,控制 器 根据 助 力传感 器 的
信 号变 化 ,分 配给 电 动机 不 同的驱 动功 率 ,实 现人
自行 充 电 器是 给 蓄 电池 补 充 电能的 装 置 。主 要 由整 力 与 电力共 同驱动 整 车。常 见 的 电动摩 托 车 ( 流 滤波 、高压开关 、电压变换 、恒 流、恒压及充 电控 车 )为非 智 能型 ,不具 备这种 功 能 ,所 以也 就没 有
应的脉冲宽度方波给大功率 MO S管驱动 电路 。P WM 是脉 冲宽 度调 制 装置 ,通 过调 节脉 冲 的 占空 比来获
得 MOS管输 出平均 电压 变化 ,实现对 电动机端 电压 的控制 。MOS管 是大 电流开关元 件 ,其导通 与关断
批注本地保存成功开通会员云端永久保存去开通
维普资讯
E Vs电动车
浅析 咆 动 廖托 拿( 自行 拿) 的
咆路 与 工作 原 理
随 着电动摩托车 ( 自行车 )逐渐普 及 ,越来越 多 骑乘 者通 过 拧动 加 速转 把来 实 现加 速 ,控 制 器 的人开始关注 电动摩托车 ( 自行车 )的维修 。在维修 根据转把 的变化进 行调速 ,达到 人机对话的 目的 。加 5V 中,电气部分 的修 理相 当重要 ,可 电动摩托 车 ( 自行 速转把 有 3根 引线 ,分别是 + 电源 、地线和 电压 车 )使用说 明书 中一 般只附有布线 图 ( 有些甚至连 布 线性连续 变化的信号 线 。常 用的信号 电压变化是 1 ~
毕业设计(论文)-电动自行车智能控制器的设计与制作
分类号密级无锡职业技术学院毕业设计说明书题目:电动自行车控制器设计英文题目;Design of electric bicycle controller****:***专业:机电一体化指导教师:石炳存职称:副教授毕业设计说明书提交日期:2013年4月15日地址:机电学院毕业设计任务书毕业设计任务书无锡职业技术学院机电工程系2013年2月20日目录目录摘要 (2)英文摘要 (2)第一章引言 (3)1.1电动自行车的意义及发展状况 (3)1.1.1自行车的历史背影及意义 (3)1.1.2 电动自行车的优点 (4)1.1.3电动自行车的发展前景 (4)第二章控制器系统的分析 (5)2.1 智能控制器的系统框图 (5)2.2 系统主要硬件介绍 (6)2.2.1 无刷直流电动机 (6)2.2.2 AT89C51 (8)2.2.3 MC14585B和CD4040B (9)2.3 系统具体实现方法 (10)2.3.1 无刷直流电动机的调速 (11)2.3.2 测速电路 (13)2.3.3 速度预置与显示 (14)2.3.4 电机驱动电路 (15)2.3.5 无刷直流电动机及控制器的保护 (16)第三章系统软件设计 (18)第四章结束语 (20)参考文献 (21)附录 (22)摘要电动自行车用于轻便灵活,节能环保,价格适中而得到人们的广泛使用,成为人们短途出行的理想交通工具。
同时中国具有庞大的自行车市场,电动自行车产业在中国有着非常广阔的应用前景,因此发展电动自行车具有良好的社会意义和客观的经济效益基于单片机系统为核心的,以无刷直流电动机驱动的电动自行车智能控制器的设计方案。
该系统包括PWM控制方案、速度测量和显示方案、刹车控制方案和电路保护方案等。
本设计主要是以单片机为核心,特别采用软硬件相结合的方式,可以极大地提高系统的安全性和可靠性。
关键词:电动自行车;智能控制;脉冲宽度调制;单片机;电机保护Abstrac tElectric bicycle for portable and flexible, energy-saving environmental protection, moderate in price and are widely used in people, an ideal vehicle for the people in the travel. At the same time, China has a huge market of bicycle, electric bicycle industry has a very broad application prospects in China, and so the development of electric bicycle has a good social significance This paper introduces a design program of intelligent control of the electronic bicycle which is based on the single chip computer system. It is derived by no brush DC motor.This system introduces speed PWM control project, speed measure and display project, brake control project, electro circuit protection project. This design is based on the single chip computer,its specialties adopt combining hardware with software for improving credibility and security.Key Words:electric bicycle ;intelligent control ;PWM; single chip computer;electro circuit protection第一章引言随着人们物质生活水平的提高,电动自行车作为一种新兴的交通工具正在越来越多地走进人们的生活。
电动摩托车电机控制器的辐射抗扰对策
电动摩托车电机控制器的辐射抗扰对策摘要:电动摩托车的传动系统与传统的摩托车动力系统有很大的区别,它的电源系统中,大功率半导体开关设备的开关导致电压和电流在很短的时间内发生变化,再加上驱动电机的高感负载,产生了很强的电磁辐射,这些辐射感应到电路上形成共模传导骚扰会对弱电回路和附近的电子设备产生强烈的影响。
此外,由于电动摩托车在空间狭小,各种功率、电子器件的整合,给电动车EMC带来了许多问题。
随着电动车的不断发展,汽车的EMC问题也日益引起了世界范围内的关注。
根据GB34660-2017标准,在对电动摩托车控制器进行电磁辐射抗扰度试验时,发现控制电动机的速度不稳定,并与标准偏差有关。
经分析,建议采用短皮包线进行再焊,以取代长环路铜导线。
经过改造,电动摩托车的控制系统运行良好。
关键词:电机;电动摩托车;辐射;控制器;抗扰对策一、EMC检测电动摩托车电机控制器的标准1.目前电动摩托车公告试验中,电磁辐射发射测试的标准有GB34660-2017《道路车辆电磁兼容性要求和试验方法》、GB14023-2011《车辆、船和内燃机无线电骚扰特性用于保护车外接收机的限值和测量方法》和GB/T18387-2017《电动车辆的电磁场发射强度的限值和测量方法》。
2. 电磁辐射抗扰度测试的标准是GB34660-2017《道路车辆电磁兼容性要求和试验方法》。
GB34660-2017是在GB14023-2011电磁辐射发射的基础上加上电磁辐射抗扰的内容,两者电磁辐射发射测试条件差不多,区别在于宽带测试中,电器件是否打开,以及窄带限值线的不同。
GB34660-2017的电磁辐射抗扰度测试频率范围在20M-2GHz之间,标准不但适用于车辆,也包含电子电气部件。
为此,本论文着重讨论了电动机控制系统的电磁辐射抗扰度及存在的问题,并提出了相应的改进措施。
为了便于研究分析,本试验是整车上测试,毕竟零部件最终还是应用在整车上使用。
二、摩托车电动机控制系统电磁辐射抗扰度的实验研究1. 试验环境:试验温度:(23±5)℃,地点:电波暗室(3米)2. 试验布置:3.试验等级:30V/m,按整车的新产品型式试验测试,只测天线垂直极化;4.车辆试验条件和失效判定准则本研究的样本是一家公司的电机控制器,见图1。
踏板式电动两轮轻便摩托车-2023标准
踏板式电动两轮轻便摩托车1范围本文件规定了踏板式电动两轮轻便摩托车的术语和定义、分类、技术要求、试验方法、检验规则、标志、包装、运输和贮存。
本文件适用于踏板式电动两轮轻便摩托车(以下简称轻便摩托车)。
2规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB518摩托车轮胎GB4599汽车用灯丝灯泡前照灯GB4660机动车用前雾灯配光性能GB/T5359.1摩托车和轻便摩托车术语第1部分:车辆类型GB/T5359.2摩托车和轻便摩托车术语第2部分:车辆性能GB/T5359.3摩托车和轻便摩托车术语第3部分:两轮车和三轮车尺寸GB/T5359.4摩托车和轻便摩托车术语第4部分:两轮车和三轮车质量GB/T5373摩托车和轻便摩托车尺寸和质量参数的测定方法GB/T5374摩托车和轻便摩托车可靠性试验方法GB/T5375摩托车和轻便摩托车型号编制方法GB/T5378摩托车和轻便摩托车道路试验方法GB7258机动车运行安全技术条件GB11554机动车和挂车用后雾灯配光性能GB11564机动车回复反射器GB14023车辆、船和内燃机无线电骚扰特性用于保护车外接收机的限值和测量方法GB15084机动车辆间接视野装置性能和安装要求GB15235汽车及挂车倒车灯配光性能GB15365摩托车和轻便摩托车操纵件、指示器及信号装置的图形符号GB/T15367摩托车和轻便摩托车两轮车和三轮车零部件名称GB15742机动车用喇叭的性能要求及试验方法GB16735道路车辆车辆识别代号(VIN)GB17352摩托车和轻便摩托车后视镜的性能和安装要求GB17353摩托车和轻便摩托车防盗装置GB17509汽车及挂车转向信号灯配光性能GB17510摩托车光信号装置配光性能GB18100.1摩托车照明和光信号装置的安装规定第1部分:两轮摩托车GB18100.2摩托车照明和光信号装置的安装规定第2部分:两轮轻便摩托车GB18100.3摩托车照明和光信号装置的安装规定第3部分:三轮摩托车3术语和定义GB/T24158界定的术语和定义适用于本文件。
正在制定的电动摩托车标准(已完成征求意见稿)
4 O
3 O
2 O
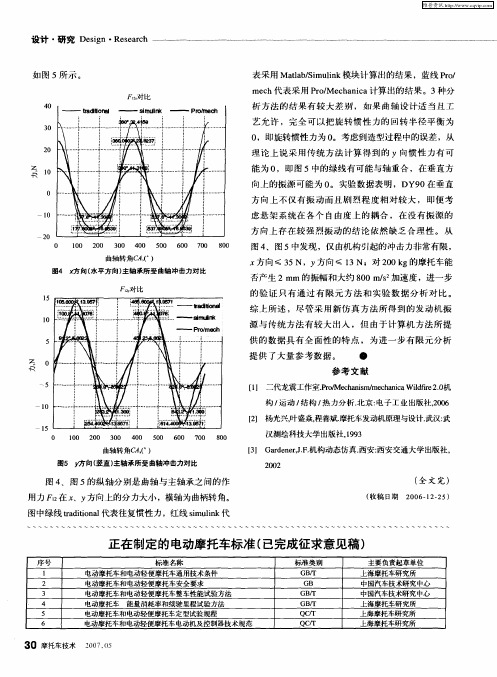
理 论上 说采 用传 统方 法 计算 得 到的 Y向惯 性 力有 可 能为 0 ,即 图 5中的绿线 有可能与轴 重合 ,在垂直方 向上的振源 可能 为 0 。实验数据表 明 ,DY9 0在垂 直
委1 0
O
方向上 不 仅有振 动而 且剧 烈 程 度相对 较大 ,即便 考
l O
虑 悬架 系统 在各 个 自由度上 的耦 合 ,在 没有振 源 的
方 向上存 在较 强 烈振 动的结 论 依然 缺 乏合理 性 。从
l0 0 20 0 30 0 40 0 50 0 60 0 70 0 80 0
—
—
2 0
O
图4 、图 5中发现 ,仅 由机构 引起的冲击力非常有限 ,
3 摩托车技术 0
20 5 070
20 o 2
图5 访 向 ( ) 竖直 主轴承所受 曲轴冲击力对 比
图4 、图 5的纵轴分 别是 曲轴 与主轴承之 间的作
( 文完) 全
( 收稿 日期 2 0 —2 2 ) 0 6 1 - 5
用力 Fz - 在 、Y 方向上的分 力大小 ,横轴为曲柄转 角。 图中绿线 t dt nl r io a代表往复惯性 力,红线 s l k ai i i 代 mu n
维普资讯
设计 ・ 研究 D s n・ ee rh ei g R sac
如 图 5所示 。
“
表采用 Ma a/i l k模块计算出的结果 ,蓝线 Po t bSmui l n r/
对 比
me h代表采用 P oMeh nc 计算 出的结果 。3 c r/ c a i a 种分 析 方法 的结 果 有较 大差 别 ,如 果 曲轴 设计适 当且 工 艺 允许 ,完 全 可以把 旋 转惯 性 力的 回转 半径 平衡 为 0 ,即旋转惯性 力为 0 。考虑到造 型过程 中的误差 ,从
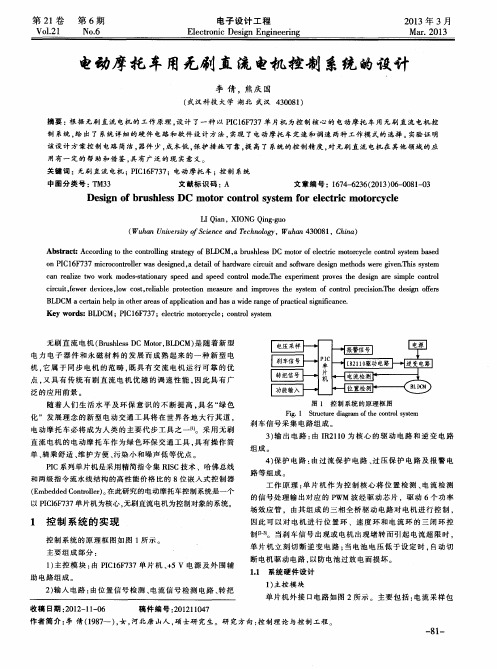
电动摩托车用无刷直流电机控制系统的设计
( 武汉科技 大学 湖 北 武汉 4 3 0 0 8 1 )
摘要 : 根 据 无 刷 直 流 电机 的 工作 原 理 , 设 计 了一 种 以 P I C1 6 F 7 3 7单 片机 为控 制 核 心 的 电动 摩 托 车 用 无 刷 直 流 电机 控
制 系统 , 给 出 了 系统 详 细 的硬 件 电路 和 软件 设 计 方 法 , 实现 了电 动摩 托 车 定 速 和 调 速 两种 工 作 模 式的 选 择 。 实验 证 明 该 设 计 方案 控 制 电路 简 洁 , 器件 少 , 成本低 , 保 护措 施 可 靠 , 提 高 了 系统 的控 制 精 度 。 对 无 刷 直 流 电 机 在 其 他 领 域 的应 用 有 一 定 的 帮助 和借 鉴 。 具 有 广 泛 的现 实 意 义
电动 摩 托 车 必 将 成 为 人 类 的 主 要 代 步 工 具 之 一 I l I 。 采 用 无 刷
直 流 电机 的 电 动 摩 托 车作 为 绿 色 环 保 交 通 工 具 。 具 有 操 作 简 单、 骑乘舒 适 、 维护方便 、 污染小和噪声低等优点 。 P I C系列 单 片机 是 采 用精 简 指 令 集 R I S C技 术 、 哈佛 总 线 和 两 级 指 令 流 水 线 结 构 的 高性 能 价 格 比 的 8 位 嵌 入 式 控 制 器
第2 1卷 第 6期
V0 1 . 21 No . 6
电子 设计 工程
El e c t r o n i c De s i g n E n g i n e e r i n g
2 0 1 3年 3月
Ma r . 2 0 1 3
电动摩 托 车 用无刷 直 流 电机 控制 系统 的设计
电动自行车用电动机及控制器现行标准
电动自行车用电动机及控制器现行标准下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!电动自行车用电动机及控制器现行标准解读1. 引言随着电动自行车的普及,电动机及其控制器的标准化变得尤为重要。
电动摩托车无刷直流电动机智能控制器设计
度 和反 馈速度 n的误 差 e和误差 变化 率 e 。 作 为
输入 变 量 , 输 出变 量 、 K 作为 P I 控制 器 的输 入 。
根据 电机 的运行 特性建 立模糊 规则 表 :
收稿 日期: 2 0 1 3 - 0 3 - 1 4
( 1 ) 在 电机 起 动 或 加减 速 阶段 , 误差 l e l 较大 , 为 了加 快起 动 速 度 , 取较 大 的值 ; 为 了避 免 超 调
I n t e l l i g e nt Con t r o l l e r De s i g n o f El e c t r i c Mo t o r c y c l e Br us h l e s s DC Mo t o r
HU A NG Ha i — b o, ME I J i a n - we i , L A N J i aБайду номын сангаасn - p i n g, Z H A NG Ka i
…
…
c,
/ / ,
驱动
… 一 … …
… ・ …
… …
… … …
…
… … …
… …
… …
… …
… …
儆持电棚 2 0 1 3 年 第 4 1 卷 第 2 期 黄 海 波, 等 … - 二 … … … … … … … … … … … … …
电动摩 托 车无 刷 直 流 电动 机 智 能控 制器 设 计
取 较 大 的
( ) = k p e ( k ) + 眺J ∑e ( ) T = 0
这里 , 为采 样 时 间 , 也 是 电 流 调 节 的计 算 周 期 。卢是 积分 项 的开关 系数 , 当l e ( ) l ≤ 时 , 卢=1 ,
QXR 1141.9-2011 电动自行车、电动摩托车和电动轻便摩托车 电机20111223
Q/XR 江苏新日电动车股份有限公司企业标准Q/XR 1141.9-2011代替Q/XR 1141.9-2010电动自行车、电动摩托车和电动轻便摩托车电机Electric bicycle, Electric motorcycle and Electric mopeds-Motors2011-XX-XX 发布 2011-XX-XX 实施江苏新日电动车股份有限公司发布前言本标准参照QC/T 792-2007《电动摩托车和电动轻便摩托车用电机及控制器技术条件》、QB/T2946 -2008《电动自行车用电机及控制器》、GB 24155-2009《电动摩托车和电动轻便摩托车安全要求》等有关标准并结合本公司实际而制定。
本标准代替Q/XR 1141.9-2010《电动车电机》。
本标准与Q/XR 1141.9-2010原标准内容相比,主要变化如下:——对原标准的格式、章节重新进行了编排;——对原有内容进行了校核;——范围将“电动车”改为“电动自行车、电动摩托车和电动轻便摩托车”。
本标准自实施之日起Q/XR 1141.9-2010作废。
本标准由江苏新日电动车股份有限公司提出本标准由江苏新日电动车股份有限公司工程技术中心标准化部归口本标准由江苏新日电动车股份有限公司工程技术中心负责起草本标准主要起草人: 徐斌、高利明本标准第一次修订人:徐斌、高利明张刚本标准于2008年首次发布,2011年12月31日为第一次修订。
制定单位编制工程技术中心:审核工程技术中心:会签单位供应商管理部质量管理部无锡工厂天津工厂襄阳工厂批准陈凯建 2011年 12月 31日电动自行车、电动摩托车和电动轻便摩托车电机1范围本标准规定了电动自行车、电动摩托车和电动轻便摩托车用电机的型号编制、技术参数、要求、试验方法、检验规则和标志、包装、运输、贮存等。
本标准适用于江苏新日电动车股份有限公司生产的电动自行车、电动摩托车和电动轻便摩托车用电机。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
电动摩托车电机原理
电动摩托车电机原理
电动摩托车的电机原理是基于电磁感应和电动原理工作的。
电动摩托车的电机是由电动机、变速器、控制器和电池组成的。
在电动摩托车的电机中,电池作为能量的供应来源,将直流电转换为摩托车电机所需的电能。
电池的电能经过控制器的调节后,进入电动机。
电动机利用电磁感应原理工作。
当电流通过电动机的线圈时,会在电动机内部产生磁场。
根据法拉第电磁感应定律,当磁场改变时,将会在线圈中产生感应电动势。
感应电动势的大小与电流的变化率成正比。
电动机的线圈通电后,产生的磁场和感应电动势将相互作用,使电动机内部的转子开始旋转。
通过变速器的调节,可以改变电动机输出的转速和扭矩。
控制器则负责控制电池组向电动机供应恰当的电能,并根据车速、负荷和驾驶需求进行调节。
控制器还可以根据需要反馈信息给仪表盘,供驾驶者实时监控电动摩托车的工作状态。
通过电磁感应原理和电流的作用,电动摩托车的电机能够将电能转化为机械能,驱动摩托车行驶。
这种工作原理不仅使得电动摩托车更加环保,还具备高效、低噪音和零排放等特点。
电动摩托车工作原理
电动摩托车工作原理电动摩托车是一种以电动机为驱动力的两轮交通工具。
相较于传统的内燃机摩托车,它具有环保、高效、低噪音等特点。
在了解电动摩托车的工作原理之前,我们先来了解一下它的基本组成部分。
一、电动摩托车的基本组成1. 电机:电动摩托车的核心部件之一,用于将电能转化为动力,驱动车轮运动。
通常采用直流无刷电机或交流异步电机。
2. 电源:提供电能给电机驱动摩托车运行。
电源可以是电池组,也可以是超级电容器或燃料电池等其他形式的电能储存装置。
3. 控制器:负责控制电动摩托车各个部件的工作状态,包括控制电机的启停、速度调节、制动等功能。
4. 传动系统:将电机的转速通过齿轮、链条等传输给摩托车的车轮,实现车辆的运动。
5. 电池管理系统:用于监测电池组的电压、电流、温度等参数,以提供安全可靠的电能供应。
二、电动摩托车的工作原理电动摩托车的工作原理可以简单概括为电能转化为机械能。
当摩托车启动时,电源供给的电能经过控制器的调节进入电机。
根据驾驶者的操作,控制器会改变电机的电流和相位角度,使电机产生适当的转矩。
电流的大小控制了电机的输出功率,而相位角度的改变则控制了电机的转速。
通过电机的运转,电能被转化为了机械能,从而带动车轮转动,实现电动摩托车的行驶。
电源则起到供能的作用。
电动摩托车通常采用可充电的电池组作为电源,如锂电池、铅酸电池等。
电池组将储存的电能通过控制器提供给电机驱动摩托车运行。
电动摩托车也可以采用其他形式的电源,如超级电容器或燃料电池,其工作原理和供能方式有所不同,但都属于电能转化为机械能的基本原理。
控制器在电动摩托车系统中起到了关键的作用。
通过控制器对电机的调节,可实现摩托车的启停、速度调节、制动等功能。
控制器接收来自驾驶者的操作信号,并通过电控系统对电机的电流和相位角度进行调节,以实现对电动摩托车的精确控制。
传动系统起到将电机输出的转矩和功率传递给摩托车车轮的作用。
常见的传动方式包括链传动和齿轮传动,其主要作用是将电机的输出转速转化为车轮的转速,并通过不同齿数的齿轮或链条来实现不同的速比。
电动摩托车用电动机及其控制器(报批稿)
ICS备案号:QC电动摩托车和电动轻便摩托车用电动机及其控制器Motors and controllers for electric motorcycles and electric mopeds(报批稿)国家发展和改革委员会发布目次前言 (Ⅱ)1 范围 (1)2 规范性引用文件 (1)3 术语和定义 (1)4 产品型号编制 (1)5 要求 (2)6 试验方法 (6)7 检验规则 (10)8 标志、包装、运输和贮存 (12)前言制定本标准的目的是指导并规范电动摩托车和电动轻便摩托车驱动用电动机及其控制器的生产,促进电动摩托车和电动轻便摩托车驱动用电动机及其控制器产品质量的提高。
本标准由全国汽车标准化技术委员会提出。
本标准由全国汽车标准化技术委员会归口。
本标准负责起草单位:国家机动车产品质量监督检验中心(上海)、中国汽车技术研究中心。
本标准参加起草单位:上海安乃达驱动技术有限公司、宁波哈利斯顿机电有限公司、国家电动自行车产品质量监督检验中心、浙江星月神电动车有限公司、浙江钱江摩托股份有限公司、中国群升集团浙江千禧工贸有限公司、天津清源电动车辆有限公司、中国嘉陵工业股份有限公司(集团)、中国轻骑集团有限公司。
本标准主要起草人:童晓敏、贾爱萍、何云堂、陈明均、黄晓东、王强、叶建军、姚湘江、赵春明、黄金权、王业明。
电动摩托车和电动轻便摩托车用电动机及其控制器1 范围本标准规定了电动摩托车和电动轻便摩托车驱动用电动机(包括含减速器的电动机)及其控制器的产品型号编制、要求、试验方法、检验规则及对标志、包装、运输和贮存的要求。
本标准适用于电动摩托车和电动轻便摩托车驱动用电动机(以下简称电动机)及其控制器。
2 规范性引用文件下列文件中的条款,通过在本标准中引用而成为本标准的部分条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
电动摩托车原理
电动摩托车原理
电动摩托车是一种使用电能驱动的摩托车,其原理是通过电能转换为机械能,使摩托车产生动力,并驱动车辆行驶。
在电动摩托车中,电能是通过电池供应的。
电池是由多个电池单元连接而成,每个电池单元内部包含正极和负极,并通过电解液或固体材料进行电化学反应。
当外部电源向电池充电时,电化学反应使得正极和负极之间产生电势差,即电能储存起来。
当电动摩托车需要运行时,电能从电池中释放出来,进入电动机。
电动机是摩托车的关键部件之一,它有一个转子和一个定子。
当电能通过定子的线圈时,会产生一个旋转磁场。
这个旋转磁场与转子上的永磁体相互作用,使得转子产生旋转运动。
转子与摩托车的车轮通过传动系统相连,使得转子的旋转运动转化为车轮的动力,从而推动摩托车行驶。
为了控制电动摩托车的速度和行驶方向,还需要一套电子控制系统。
该系统通常包括电子调速器、变频器、控制器等部件。
电子调速器可以调整电动机的转速和力矩输出,以实现不同速度的行驶。
变频器则可以改变电动机输入电压和频率,控制电机的运行情况。
控制器则负责接收驾驶者的指令,并根据指令控制电动摩托车的加速、制动等操作。
总结起来,电动摩托车的原理是通过电能转化为机械能,实现车辆的动力驱动。
其中,电池储存电能,电动机将电能转化为旋转运动,传动系统将旋转运动转化为车轮动力,电子控制系
统控制速度和行驶方向。
这样,电动摩托车就能高效、清洁地运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ICS备案号:QC电动摩托车和电动轻便摩托车用电动机及其控制器Motors and controllers for electric motorcycles and electric mopeds(报批稿)国家发展和改革委员会发布目次前言 (Ⅱ)1 范围 (1)2 规范性引用文件 (1)3 术语和定义 (1)4 产品型号编制 (1)5 要求 (2)6 试验方法 (6)7 检验规则 (10)8 标志、包装、运输和贮存 (12)前言制定本标准的目的是指导并规范电动摩托车和电动轻便摩托车驱动用电动机及其控制器的生产,促进电动摩托车和电动轻便摩托车驱动用电动机及其控制器产品质量的提高。
本标准由全国汽车标准化技术委员会提出。
本标准由全国汽车标准化技术委员会归口。
本标准负责起草单位:国家机动车产品质量监督检验中心(上海)、中国汽车技术研究中心。
本标准参加起草单位:上海安乃达驱动技术有限公司、宁波哈利斯顿机电有限公司、国家电动自行车产品质量监督检验中心、浙江星月神电动车有限公司、浙江钱江摩托股份有限公司、中国群升集团浙江千禧工贸有限公司、天津清源电动车辆有限公司、中国嘉陵工业股份有限公司(集团)、中国轻骑集团有限公司。
本标准主要起草人:童晓敏、贾爱萍、何云堂、陈明均、黄晓东、王强、叶建军、姚湘江、赵春明、黄金权、王业明。
电动摩托车和电动轻便摩托车用电动机及其控制器1 范围本标准规定了电动摩托车和电动轻便摩托车驱动用电动机(包括含减速器的电动机)及其控制器的产品型号编制、要求、试验方法、检验规则及对标志、包装、运输和贮存的要求。
本标准适用于电动摩托车和电动轻便摩托车驱动用电动机(以下简称电动机)及其控制器。
2 规范性引用文件下列文件中的条款,通过在本标准中引用而成为本标准的部分条款。
凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB 191—2000 包装储运图示标志(ISO 780:1997,EQV)GB 14023—2006 车辆、船和由内燃机驱动的装置无线电骚扰特性限值和测量方法(CISPR 12:2005,IDT)GB/T 2423.5 电工电子产品基本环境试验第2部分:试验方法试验Ea和导则:冲击(GB/T 2423.5-1995,IEC 60068-2-27:1987,IDT)GB/T 2423.10 电工电子产品基本环境试验第2部分:试验方法试验Fc和导则:振动(正弦)(GB/T 2423.10-1995,IEC 60068-2-6:1982,IDT)GB/T 4942.1—2001 旋转电机外壳防护分级(IP代码)(IEC 60034-5:1991,IDT)GB/T 4942.2—1993 低压电器外壳防护等级(IEC 947-1:1988,EQV)GB/T 5171—2002 小功率电动机通用技术条件GB/T 10069.1—2006 旋转电机噪声测定方法及限值第1部分:旋转电机噪声测定方法(ISO 1680:1999,MOD)GB/T 13202—1997 摩托车轮辋系列(ISO 4249-3:1990,EQV)GB/T 17619—1998 机动车电子电器组件的电磁辐射抗扰性限值和测量方法(95/94/EC,NEQ)GB/T 18387 电动车辆的电磁场辐射强度的限值和测量方法宽带9kHz~30MHzQC/T 413—2002 汽车电气设备基本技术条件3 术语和定义下列术语和定义适用于本标准。
3.1 一体轮 wheel with the outer shell of motor integrated轮毂和电动机外壳做成一个整体的摩托车主动轮。
4 产品型号编制4.1 电动机型号电动机的型号,由机座号、产品名称代号、性能参数代号和派生代号四个部分组成。
例如:20 ZW-J 4835310 YA派生代号;性能参数代号(额定电压48V,额定转速350r/min,额定转矩10N·m);产品名称代号;机座号。
4.1.1 机座号一体轮轮毂电动机的机座号为GB/T 13202—1997所规定的轮辋名义直径代号。
内转子电动机的机座号为电动机的机壳外径(单位mm)。
4.1.2 产品名称代号电动机产品基本名称代号为:Z ——有刷直流电动机;ZW ——无刷直流电动机;YC ——永磁同步电动机;KC ——开关磁阻电动机。
需要时可以在基本名称代号的后面加扩展名称代号,二者之间用符号“-”隔开。
扩展名称代号为:J ——带减速器的。
4.1.3 性能参数代号性能参数代号为7位阿拉伯数字。
前两位为电动机额定电压值(单位V),第3、4位是电动机额定转速(单位r/min)的前两位数,第5位是电动机额定转速的整数位数,第6、7位是电动机额定转矩的整数值(单位N·m,不足两位时前面加一个0)。
4.1.4 派生代号一体轮轮毂电动机的派生代号依次为YA、YB、YC……。
内转子电动机的派生代号为NA、NB、NC……。
二字母中的后一个不使用I、N、O、Y。
4.2 控制器型号控制器的型号,由产品名称代号、电压等级、电流等级代号和派生代号四个部分组成。
例如:ZWK048 020 A派生代号;电流等级代号;电压等级;产品名称代号。
4.2.1 产品名称代号控制器产品名称代号为:ZK ——有刷直流电动机控制器;ZWK——无刷直流电动机控制器;YCK ——永磁同步电动机控制器;KCK ——开关磁阻电动机控制器。
4.2.2 电压等级控制器采用直流24V、36V、48V、60V、72V……电压(12 V的整数倍)。
电压等级用额定电压的整数值(三位阿拉伯数字)表示,不足三位时前面加一个0。
4.2.3 电流等级代号控制器的电流等级用控制器最大输入电流的整数值(单位安培,三位阿拉伯数字)表示,不足三位时前面加一个0。
4.2.4 派生代号派生代号依次为A、B……(字母I、N、O、Y除外)。
5 要求5.1 使用环境条件电动机和控制器应能在下列条件下正常工作:——环境温度:-25℃~+60℃;——相对湿度:0~100%。
5.2 额定电压采用直流24V、36V、48V、60V、72V……电压(12 V的整数倍)。
5.3 外观电动机和控制器表面应无锈蚀、碰伤、裂痕,涂覆层应无剥落;紧固件连接要牢固;引出线应完整无损;电动机和控制器的铭牌内容应正确,字迹应清晰,底色不得脱落。
5.4 外形尺寸及安装尺寸电动机和控制器的外形尺寸及安装尺寸应符合企业技术文件的规定。
5.5 装配质量5.5.1 电动机轴向间隙电动机的轴向间隙应不大于0.3mm。
5.5.2 径向圆跳动内转子电动机的轴伸的径向圆跳动应不大于表1所规定的限值。
表1 内转子电动机轴伸径向圆跳动mm5.5.3 端面跳动一体轮轮毂电动机轮辋外缘端面跳动应不大于1mm。
5.6 引出线和接插件5.6.1引出线的颜色无刷直流电动机、永磁同步电动机和开关磁阻电动机的三相主绕组线中A相线为兰色,B相线为绿色,C相线为黄色。
无刷直流电动机位置传感器的信号线中电源正极为红色,电源负极为黑色,A相传感器信号线为兰色,B相传感器信号线为绿色,C相传感器信号线为黄色。
有刷直流电动机绕组线中绕组正极为红色,绕组负极为黑色。
控制器的电源输入线中电源正极为红色,电源负极为黑色。
控制器调节指令输入线为兰色,控制器刹车指令输入线为绿色。
控制器与电动机相接的连接线的颜色应与电动机相应线相一致。
有刷电机控制器中与电动机绕组相对应的引出线与控制器的电源线,二者应有明显的区分标志。
5.6.2 电动机引出线强度每根电动机主绕组引出线承受25N拉力,传感器引出线承受9N拉力后,应能保持完整无损。
5.6.3 接插件电动机及控制器引出线的接插件应符合企业技术文件的规定。
5.7 绝缘电阻电动机和控制器的绝缘电阻应符合表2的规定。
绝缘电阻用兆欧表测定,兆欧表的电压按表3规定。
5.8 绝缘介电强度电动机的绕组与机壳之间、控制器电源的地与机壳或散热器之间,都应能承受如下耐电压试验:a)交流电频率为50 Hz ~60Hz,波形为实际正弦波;b)试验设备的容量不小于0.5kV A;c)额定电压在48V以下的(含48V),由独立电源供电的电动机,其试验电压(有效值)为500V;其它电动机的试验电压(有效值)为1000V+2U N(U N为额定电压),低于1500V时为1500V。
d)试验历时1 min。
试验过程中,跳闸电流应不大于5mA。
试验过程中不得发生击穿或飞弧现象。
一般不对同一台电动机重复进行本项试验。
如确有需要重复进行本项试验,第2次试验时所用试验电压为上述规定试验电压的80%。
批量生产的电动机进行绝缘介电强度试验时,试验电压允许用上述规定值的120%,试验时间相应缩短至1s。
5.9 定子电阻电动机各相定子绕组的电阻应在企业技术文件所规定的范围内。
5.10 定子电感电动机各相定子绕组在频率1000Hz下的电感应在企业技术文件所规定的范围内。
5.11电动机转子的旋转方向单向出线的电动机逆时针(一体轮轮毂电动机从出线端看;内转子电动机从轴伸端看)为正方向。
双向出线的一体轮轮毂电动机的旋转方向按企业技术文件的规定。
5.12空载电流电动机在额定电压下空载运行5min后保持空载,绕组的输入电流不得大于企业技术文件所规定的限值。
5.13 电动机额定参数和效率5.13.1 额定转矩、额定转速和额定输出功率额定电压、额定转矩工况下,电动机的转速和输出功率应分别在企业技术文件所规定的偏差范围内。
5.13.2 效率额定电压、额定转矩工况下,电动机效率应不低于75%。
额定电压、50%和160% 额定转矩工况下,电动机的效率应不低于70%。
5.14 电动机超速电动机(永磁同步电动机除外)在1.2倍额定电压下空载超速运行2 min,不得发生机械变形或发出异常声响。
5.15 电动机短时过载电动机在额定电压下应能承受2.5倍额定转矩(持续时间1min),重新启动后应仍能正常运转。
5.16 控制器最大输入电流控制器最大输入电流应在企业技术文件所规定的范围内。
5.17 控制器额定输入电流在企业技术文件规定的控制器额定输入电流工况下,控制器应能连续2h正常运转。
5.18 控制器效率控制器在额定电压、额定输入电流工况下的效率应大于95%。
5.19 控制器短时过载控制器应能承受2.5倍额定输入电流,持续1min的短时过载。
5.20 控制器调节功能开环控制的控制器应具有电压调节功能;外环为速度闭环控制的控制器应具有速度调节功能;外环为转矩闭环控制的控制器应具有转矩调节功能。
5.21 控制器欠压保护功能控制器应有欠压保护功能,欠压值由企业技术文件规定,当降低控制器电压到欠压规定值时,控制器应能自动断电不再工作。