步进电机可编程驱动控制器设计资料及例程
步进电机控制方法及编程实例
步进电机控制方法及编程实例
步进电机在现代自动化控制系统中广泛应用,其精准的位置控制和相对简单的驱动方式使其成为许多工业和家用设备中的理想选择。
本文将介绍步进电机的控制方法及编程实例,帮助读者更好地理解和应用这一技术。
步进电机的基本原理
步进电机是一种将电能转换为机械能的电机,其运行原理基于磁场相互作用。
步进电机内部包含多个电磁线圈,根据电流方向和大小的不同来控制转子的运动。
通过逐个激活线圈,可以实现步进电机的准确位置控制,使其能够按照指定的步长旋转。
步进电机的控制方法
1.单相激励控制:最简单的步进电机控制方式之一。
通过依次激活每一相的线圈,
使电机按照固定步长旋转。
这种方法控制简单,但稳定性较差。
2.双相正交控制:采用两相电流的正交控制方式,提高了步进电机的稳定性和精
度。
可以实现正向和反向旋转,常用于对位置要求较高的应用场景。
3.微步进控制:将步进电机每个步进细分为多个微步进,以提高控制精度和减小振
动。
虽然增加了控制复杂度,但可以获得更平滑的运动和更高的分辨率。
步进电机的编程实例
下面以Python语言为例,演示如何通过控制步进电机的相序来实现简单的旋转控制。
通过以上代码,可以实现对步进电机的简单控制,按照设定的相序进行旋转,实现基本的位置控制功能。
结语
步进电机是一种常用的精准位置控制设备,掌握其控制方法和编程技巧对于工程师和爱好者来说都是有益的。
希望本文介绍的步进电机控制方法及编程实例能够帮助读者更好地理解和应用这一技术。
plc驱动步进电机课程设计

plc驱动步进电机课程设计一、课程目标知识目标:1. 学生能够理解PLC(可编程逻辑控制器)的基本原理和功能。
2. 学生能够掌握步进电机的构造、工作原理及其与PLC的连接方式。
3. 学生能够掌握PLC编程控制步进电机的相关指令和程序编写方法。
技能目标:1. 学生能够运用PLC对步进电机进行正转、反转、停止等基本控制。
2. 学生能够通过PLC编程实现步进电机的速度和位置控制。
3. 学生能够解决实际应用中步进电机控制中的常见问题,并进行故障排查。
情感态度价值观目标:1. 培养学生对自动化技术和电气工程领域的兴趣,激发探索精神。
2. 培养学生团队协作、沟通交流的能力,增强解决问题的自信心。
3. 培养学生具备安全意识,关注环境保护和可持续发展。
课程性质:本课程为实践性较强的课程,以理论为基础,侧重于实际操作和应用。
学生特点:学生具备一定的电工电子基础知识,对PLC和步进电机有一定了解,但实践经验不足。
教学要求:结合课程性质、学生特点,注重理论与实践相结合,以学生动手实践为主,培养实际操作能力。
在教学过程中,分解课程目标为具体的学习成果,以便于教学设计和评估。
二、教学内容1. 理论知识:- PLC工作原理与结构组成- 步进电机的构造、原理及特性- PLC与步进电机的接口技术及连接方式2. 实践操作:- PLC编程软件的使用方法- 步进电机控制指令的编写和调试- 步进电机速度和位置控制程序的编写与实现3. 教学案例:- 分析实际应用中的步进电机控制案例,如自动化生产线、机器人等- 故障排查与解决方法4. 教学大纲安排:- 第一周:PLC工作原理、步进电机原理及特性学习- 第二周:PLC与步进电机接口技术、连接方式学习- 第三周:PLC编程软件使用、步进电机控制指令编写- 第四周:步进电机速度和位置控制程序编写、调试及优化- 第五周:教学案例分析与讨论,故障排查与解决教学内容关联教材章节:- 教材第1章:PLC概述- 教材第2章:PLC硬件与软件- 教材第3章:步进电机及其控制- 教材第4章:PLC应用实例教学内容注重科学性和系统性,结合教学大纲和教材章节,有序安排教学进度,确保学生能够逐步掌握PLC驱动步进电机的相关知识和技能。
PLC实训程序--步进电机的PLC控制

步进电机的PLC控制一、实验目的1、掌握PLC控制的基本原理,掌握移位寄存器的使用。
2、掌握步进电机的工作原理,掌握环形分配器的使用方法。
3、掌握运用PLC驱动步进的方法。
二、实验器材1、PLC-2型可编程控制器实验台1台2、步进电机的PLC控制演示板1块3、PC机或手持编程器1台4、编程电缆1根5、自锁式连接导线若干图16.1三、实验原理与实验步骤1、步进电机的PLC控制演示板如图16.1所示。
2、实验原理本演示装置采用的四相步进电机,运用PLC设计一个步进电机的环形分配器的软件程序。
以此来实现步进电机的单步,连续运转。
四相步进电机的结构如下图所示。
演示板上四个LED发光管分别代表步进电机的四个相位。
3、设计要求:按照步进电机的工作方式,设四相线圈分别为A、B、C、D,公共端为E、F。
当电机正向转动时其工作时序如下:A→AB→B→BC→C→CD→D→DA当电机反向转动时其工作时序如下:A←AB←B←BC←C←CD←D←DA要求慢速度为I S—格,快速度为0.1S—格。
4、实验步骤:(1)打开PLC-2型实验台电源,编程器与PLC连接。
(2)根据具体情况编制输入程序,并检查是否正确。
(3)实验台与PLC-DOME008连接,检查连线是否正确。
(4)按下启动按钮,观察运行结果。
四、设计程序清单1、I/O地址分配清单:输入地址:正向启动X0 反向启动X1停止X2 速度控制X3 输出地址: A Y0 B Y1C Y2 C Y3E\F COM2、程序(1)指令表0 LD X0001 OR S02 ANI X0013 ANI X0024 OUT S06 LD X0017 OR S18 ANI X0009 ANI X00210 OUT S112 LD X00313 CJ P0 16 LDI T33 26 OUT Y01527 LDI X00328 CJ P131 P032 LDI T3333 OUT T32 K136 LD T3237 OUT T33 K140 OUT S242 OUT Y01543 P144 LD S245 PLS M1051 ANI M552 ANI M653 ANI M754 AND S155 LDI M256 ANI M357 ANI M458 ANI M559 ANI M660 ANI M761 ANI M862 AND S063 ORB68 AND S069 SFTR M0 M1 K8 K178 MPP79 AND S180 SFTL M0 M2 K8 K189 LD M190 OR M291 OR M892 OUT Y00093 LD M294 OR M395 OR M496 OUT Y00117 OUT T32 K520 LD T3221 OUT T33 K5 24 OUT S2101 LD M6102 OR M7 47 LDI M148 ANI M249 ANI M350 ANI M4103 OR M864 OUT M065 LD M800266 OR M1067 MPS104 OUT Y00397 LD M498 OR M599 OR M6100 OUT Y002105 END梯形图接线图※FX系列的输出继电器的公共端:FX2N-32MR为COM0~COM4;FX2N-48MR为COM0~COM5; FX1N-60MR为COM0~COM7五、思考题1、如果是三相步进电机,工作方式为三相六拍,程序该如何编制?2、如果是E、F公共端不接,作为二相时机使用,程序又该如何处理?。
PLC控制步进电机的应用案例
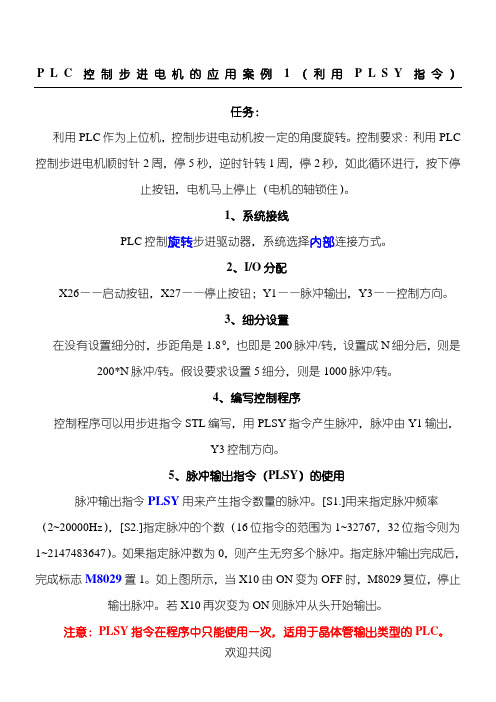
P L C控制步进电机的应用案例1(利用P L S Y指令)任务:利用PLC作为上位机,控制步进电动机按一定的角度旋转。
控制要求:利用PLC 控制步进电机顺时针2周,停5秒,逆时针转1周,停2秒,如此循环进行,按下停止按钮,电机马上停止(电机的轴锁住)。
1、系统接线PLC控制旋转步进驱动器,系统选择/转,设置成N细分后,则1000脉冲/转。
Y1输出,Y3[S1.]用来指定脉冲频率(2~20000Hz),[S2.]指定脉冲的个数(16位指令的范围为1~32767,32位指令则为1~2147483647)。
如果指定脉冲数为0,则产生无穷多个脉冲。
指定脉冲输出完成后,完成标志M8029置1。
如上图所示,当X10由ON变为OFF时,M8029复位,停止输出脉冲。
若X10再次变为ON则脉冲从头开始输出。
注意:PLSY指令在程序中只能使用一次,适用于晶体管输出类型的PLC。
6、控制流程图7、梯形图程序(参考)8、制作触摸屏画面PLC控制步进电机的应用案例2(利用定时器T246产生脉冲)任务:利用步进电机驱动器可以通过PLC端的On和Off就能决定电机的正传或者反转;步进驱动器的其中一个。
Y2;PLC的COM1——GND;B绕组X0X4—频率增加,X5—频率4、制作触摸屏画面PLC控制步进电机的应用案例3(利用FX2N-1PG产生脉冲)任务:应用定位脉冲输出模块FX2N-1PG,通过步进驱动系统对机器人左右、旋转、上下运动进行定位控制。
控制要求:正向运行速度为1000Hz,连续输出正向脉冲,加减速时间为100ms,1、系统接线系统选择外部连接方式。
PLC通过FX2N-1PG控制左右、旋转、上下步进驱动器的其中一个。
VIN端、CP+端、U/D+端——+24VDC; CP-——FP;U/D-——Y4;PLC的COM1端、FX2N-1PG的COM0端——GNDA、A-——电机A绕组;B、B-2、I/O分配。
步进电机可编程驱动控制器设计及例程

步进电机可编程驱动控制器【简要说明】一、尺寸:长88mmX宽68mmX高35mm二、主要芯片:AT89S52单片机、L298NL、298N(支持AT89S52编程)三、工作电压:输入电压(5V~30V)输入电压的大小由被控制电机的额定电压决定。
四、可驱动直流(5~30V之间电压的直流电机或者步进电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、转速、转向、工作方式可根据程序灵活控制6、可单独控制一台步进电机7、根据需要自己编程可以灵活控制步进电机,实现多种功能;8、可实现正反转9、采用光电隔离10、单片机P3口已用排针引出,可以方便使用者连接控制更多外围设备。
11、四位LED灯指示12、四位按键输入(可以对AT89S52单片机编程实现任何控制)13、核心控制芯片采用市场上最常用的AT89S52单片机,支持STC89C52单片机,控制方式简单,只需控制IO口电平即可!14、采用独立编码芯片L297,不用在单片机程序里编程复杂的逻辑代码和占用单片机资源。
15、设计有程序下载口,可以实时编程实时调试。
16、芯片都安装在对应的管座上,可以随时更换芯片。
17、外部连线采用旋转压接端子,使接线更牢固。
18、四周有固定安装孔。
产品最大特点:可以对AT89S52单片机编程实现任意控制被控的直流电机或者步进电机。
适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
注意啦:本产品提供例程(附带原理图以及说明!)【标注图片】【步进电机控制接线图】步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
步进电机控制器编程实例

步进电机控制器编程实例步进电机控制器编程实例,是一种可以用来控制步进电机的编程语言。
步进电机控制器是一种微处理器,它通过应用特定的程序指令来控制步进电机的转动角度。
它可以根据不同的应用需求,以不同的步进电机控制器编程语言来编写不同的步进电机控制程序。
步进电机控制器编程实例主要包括以下几个部分:1、步进电机介绍:步进电机是一种常用的旋转电机,具有精确的控制功能,可以实现高精度的位置控制和精确的速度控制。
步进电机的特点是采用梯形转子,在每种工作状态下均能实现精确的转动角度控制。
2、步进电机控制系统概述:步进电机控制系统包括电机驱动器、步进电机控制器和外围设备三大部分,是一个复杂的控制系统。
步进电机电机驱动器是将电子信号转换成电流输出,驱动步进电机转动的重要环节;步进电机控制器是系统的控制中心,它根据输入的指令和参数,对步进电机的转动角度、速度和方向进行控制;而外围设备则是用于将系统中的信号转换成具体的控制信号的重要环节。
3、步进电机控制器编程语言:步进电机控制器编程语言是用于编写步进电机控制程序的语言,它主要由指令代码和参数组成。
根据不同的应用需求,可以使用不同的步进电机控制器编程语言来编写步进电机控制程序,如C语言、Assembler语言等。
4、步进电机控制程序编写:在步进电机控制程序的编写过程中,需要考虑到各种参数的设置,如脉冲频率、脉冲模式、步进电机驱动器的类型等。
步进电机控制程序的编写必须遵循相应的编程规则,以确保步进电机的精确性和可靠性。
5、步进电机控制程序优化:步进电机控制程序的优化是必不可少的,可以采取多种技术手段来提高步进电机控制程序的性能,如分析步进电机控制程序的指令和参数,优化程序的结构,以及提高步进电机的转动速度等。
6、步进电机控制程序调试:步进电机控制程序的调试是检查步进电机控制程序的功能和性能的重要环节,可以采用多种方法进行调试,如基于字节代码的调试、基于硬件的调试、基于模块的调试等。
毕业设计——步进电机控制器电路及程序
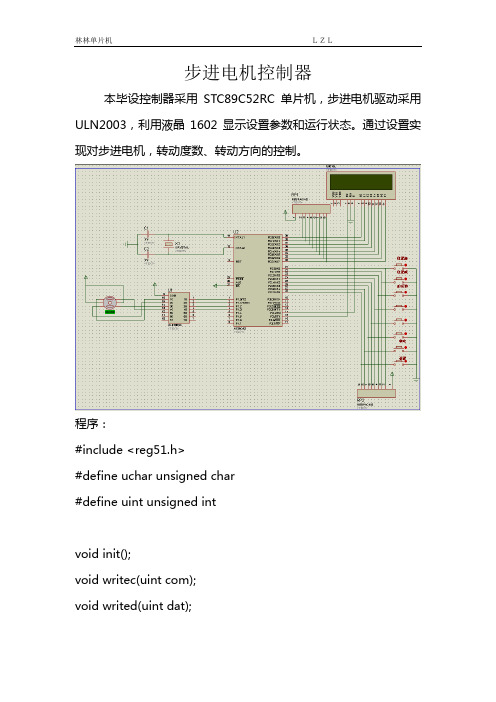
步进电机控制器本毕设控制器采用STC89C52RC单片机,步进电机驱动采用ULN2003,利用液晶1602显示设置参数和运行状态。
通过设置实现对步进电机,转动度数、转动方向的控制。
程序:#include <reg51.h>#define uchar unsigned char#define uint unsigned intvoid init();void writec(uint com);void writed(uint dat);void delay(uint shu);void xieshuzu(uchar a[],uchar add); void kaiji();void option_turn(uchar n);void rightturn(uchar q);//uchar keyscan();sbit en_a=P1^0;sbit en_b=P1^1;sbit en_c=P1^2;sbit en_d=P1^3;sbit e=P3^4;sbit rs=P3^5;sfr duan=0x80;uchar code table[] =" 0713024031 "; uchar code table2[]=" BYSJ "; uchar code table3[]="POS: +360.00"; uchar code table4[]="V: R/s"; /***************delay1ms************/ void delay(uint shu){uint i,j;for(i=shu;i>0;i--)for(j=110;j>0;j--);}/******************反转****************************/ void option_turn(uchar n){uchar i;for(i=0;i<n;i++){en_a=1;en_b=1;en_c=1;en_d=0;delay(150); //D相en_a=1;en_b=1;en_c=0;en_d=0;delay(150); //DC相 */en_a=1;en_b=1;en_c=0;en_d=1;delay(150); // C 相 */en_a=1;en_b=0;en_c=0;en_d=1;delay(150); //BC相 */en_a=1;en_b=0;en_c=1;en_d=1;delay(150);//B相en_a=0;en_b=0;en_c=1;en_d=1;delay(150); //BA相*/en_a=0;en_b=1;en_c=1;en_d=1;delay(150); //A相en_a=0;en_b=1;en_c=1;en_d=0;delay(150); //DA相*/}}/******************正转****************************/ void rightturn(uchar q){uchar j;for(j=0;j<q;j++){en_b=1;en_c=1;en_d=1;delay(150); //A相en_a=0;en_b=0;en_c=1;en_d=1;delay(150); //ab相 */en_a=1;en_b=0;en_c=1;en_d=1;delay(150); // 、、B 相 */en_a=1;en_b=0;en_c=0;delay(150); //BC相 */en_a=1;en_b=1;en_c=0;en_d=1;delay(150);//c相en_a=1;en_b=1;en_c=0;en_d=0;delay(150); //CD相*/en_a=1;en_b=1;en_c=1;en_d=0;delay(150); //d相en_a=0;en_c=1;en_d=0;delay(150); //DA相*/}}/***********************/void kaiji(){xieshuzu(table,0x80);xieshuzu(table2,0xc0);}/***********************/void xieshuzu(uchar a[],uchar add) {uchar cis;writec(add);for(cis=0;a[cis]!='\0';cis++){writed(a[cis]);delay(2);}}/***********************/ void xies(uchar a,uchar add) {writec(add);writed(0x30+a);}/***********************/ void writec(uint com){ e=0;rs=0;duan=com;delay(2);e=1;delay(2);e=0;}/***********************/ void writed(uint dat){e=0;rs=1;duan=dat;delay(2);e=1;delay(2);e=0;}/***********************/void init(){writec(0x01);writec(0x38);writec(0x0c);}/*******************/ void keyscan(void){/***************uchar keyscan(){uchar k,skey;key=0xfe;skey=key;if(skey!=0xfe){ delay(10);skey=key;if(skey!=0xfe){switch(skey){case(0xee):k=7;kc++;break;case(0xde):k=8;kc++;break;case(0xbe):k=9;kc++;break;case(0x7e):k=0x0a;kc++;break;default:break;}while(skey!=0xfe)skey=key;return k;}key=0xfd;skey=key;if(skey!=0xfd){ delay(10);skey=key;if(skey!=0xfd){switch(skey){case(0xed):k=4;kc++;break;case(0xdd):k=5;kc++;break;case(0xbd):k=6;kc++;break;case(0x7d):k=0x0b;kc++;break;default:break;}while(skey!=0xfd)skey=key;return k;}}key=0xfb;skey=key;if(skey!=0xfb)delay(10);skey=key;if(skey!=0xfb){switch(skey){case(0xeb):k=1;kc++;break;case(0xdb):k=2;kc++;break;case(0xbb):k=3;kc++;break;case(0x7b):k=0x0c;kc++;break;default:break;}while(skey!=0xfb)skey=key;return k;}key=0xf7;skey=key;if(skey!=0xf7){ delay(10);skey=key;if(skey!=0xf7){switch(skey){case(0xe7):k=0x0d;kc++;break;case(0xd7):k=0; kc++;break;case(0xb7):k=0x0e;kc++;break;case(0x77):k=0x0f;kc++;break;default:break;}while(skey!=0xf7)skey=key;return k;}}}********//***********************//********************************************/ void main(void){init();kaiji();delay(2000);xieshuzu(table3,0x80);xieshuzu(table4,0xc0);while(1){if(P2^7==0)option_turn(250);//rightturn(250);delay(250);}}如果在做的过程中遇到问题可以联系我QQ:793001021乐意为大家服务!。
步进电机控制器设计
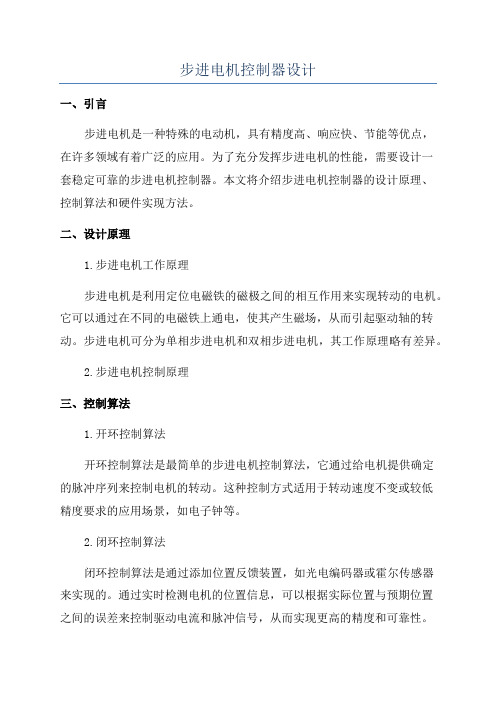
步进电机控制器设计一、引言步进电机是一种特殊的电动机,具有精度高、响应快、节能等优点,在许多领域有着广泛的应用。
为了充分发挥步进电机的性能,需要设计一套稳定可靠的步进电机控制器。
本文将介绍步进电机控制器的设计原理、控制算法和硬件实现方法。
二、设计原理1.步进电机工作原理步进电机是利用定位电磁铁的磁极之间的相互作用来实现转动的电机。
它可以通过在不同的电磁铁上通电,使其产生磁场,从而引起驱动轴的转动。
步进电机可分为单相步进电机和双相步进电机,其工作原理略有差异。
2.步进电机控制原理三、控制算法1.开环控制算法开环控制算法是最简单的步进电机控制算法,它通过给电机提供确定的脉冲序列来控制电机的转动。
这种控制方式适用于转动速度不变或较低精度要求的应用场景,如电子钟等。
2.闭环控制算法闭环控制算法是通过添加位置反馈装置,如光电编码器或霍尔传感器来实现的。
通过实时检测电机的位置信息,可以根据实际位置与预期位置之间的误差来控制驱动电流和脉冲信号,从而实现更高的精度和可靠性。
闭环控制算法适用于需要高精度定位和转动的应用场景,如机械臂、3D 打印机等。
四、硬件实现方法1.驱动电路设计2.信号生成电路设计为了实现精确的脉冲信号控制,需要设计合适的信号生成电路。
可以采用时序电路、计数器和锁相环等技术来生成脉冲信号,并根据控制算法调节脉冲频率和脉冲数。
3.位置反馈装置设计如果需要闭环控制,需要添加位置反馈装置来实时检测电机的位置信息。
可以选择光电编码器、霍尔传感器等位置传感器,并设计相应的信号处理电路。
五、总结步进电机控制器设计涉及到步进电机的工作原理、控制算法和硬件实现方法。
根据具体的应用需求和系统要求,可以选择合适的控制算法和电路设计方案。
同时,还需考虑控制器的稳定性、可靠性和成本等因素,以实现高性能的步进电机控制系统。
步进电机plc课程设计

步进电机plc课程设计一、教学目标本课程旨在通过学习步进电机PLC(可编程逻辑控制器)的相关知识,使学生掌握步进电机的工作原理、PLC的基本组成、编程方法以及步进电机PLC控制系统的设计与调试。
1.了解步进电机的工作原理及其主要性能参数。
2.掌握PLC的基本组成、工作原理及其编程方法。
3.熟悉步进电机PLC控制系统的设计与调试。
4.能够分析步进电机的工作需求,选择合适的PLC控制器。
5.能够根据控制需求,编写相应的PLC程序。
6.能够对步进电机PLC控制系统进行调试与优化。
情感态度价值观目标:1.培养学生对新技术的兴趣和好奇心,提高学生的学习积极性。
2.培养学生团队合作精神,提高学生解决实际问题的能力。
3.培养学生具备创新意识,激发学生对步进电机PLC技术的应用与发展前景的思考。
二、教学内容本课程的教学内容主要包括以下几个部分:1.步进电机的基本原理及其主要性能参数。
2.PLC的基本组成、工作原理及其编程方法。
3.步进电机PLC控制系统的设计与调试。
具体的教学内容安排如下:第一章:步进电机概述1.1 步进电机的工作原理1.2 步进电机的主要性能参数第二章:PLC基本组成与工作原理2.1 PLC的硬件组成2.2 PLC的工作原理2.3 PLC编程软件的使用第三章:PLC编程方法3.1 基本指令及其编程3.2 功能指令及其编程3.3 步进电机控制程序编写实例第四章:步进电机PLC控制系统设计与调试4.1 步进电机PLC控制系统设计流程4.2 步进电机PLC控制系统的调试与优化三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学,包括:1.讲授法:通过讲解步进电机PLC的基本原理、编程方法等理论知识,使学生掌握相关知识点。
2.案例分析法:通过分析实际案例,使学生了解步进电机PLC控制系统的应用,提高学生的实际操作能力。
3.实验法:安排实验室实践环节,让学生动手操作,加深对理论知识的理解。
步进电机控制系统的设计及应用案例
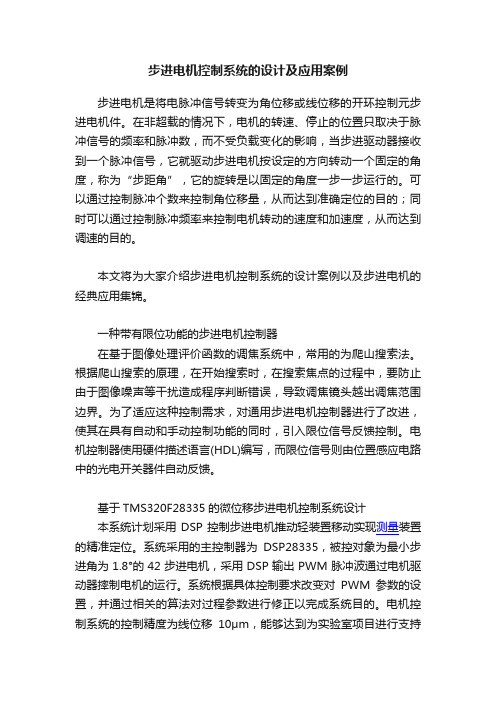
步进电机控制系统的设计及应用案例步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
本文将为大家介绍步进电机控制系统的设计案例以及步进电机的经典应用集锦。
一种带有限位功能的步进电机控制器在基于图像处理评价函数的调焦系统中,常用的为爬山搜索法。
根据爬山搜索的原理,在开始搜索时,在搜索焦点的过程中,要防止由于图像噪声等干扰造成程序判断错误,导致调焦镜头越出调焦范围边界。
为了适应这种控制需求,对通用步进电机控制器进行了改进,使其在具有自动和手动控制功能的同时,引入限位信号反馈控制。
电机控制器使用硬件描述语言(HDL)编写,而限位信号则由位置感应电路中的光电开关器件自动反馈。
基于TMS320F28335的微位移步进电机控制系统设计本系统计划采用DSP控制步进电机推动轻装置移动实现测量装置的精准定位。
系统采用的主控制器为DSP28335,被控对象为最小步进角为1.8°的42步进电机,采用DSP输出PWM脉冲波通过电机驱动器摔制电机的运行。
系统根据具体控制要求改变对PWM参数的设置,并通过相关的算法对过程参数进行修正以完成系统目的。
电机控制系统的控制精度为线位移10μm,能够达到为实验室项目进行支持的目的,亦可广泛应用于电机控制领域。
基于CAN总线汽车组合仪表的设计与研究-步进电机驱动、存储电路设计及外围电路本系统步进电机VID29系列二相汽车仪表步进电机。
vID29-XX/VID29~xXp仪表步进电机是一种精密的步进电机,内置减速比180/1的齿轮系,主要应用于车辆的仪表指示盘,也可以用于其他仪器仪表装置中,将数字信号直接准确地转为模拟的显示输出,需要两路逻辑脉冲信号驱动。
电机驱动与可编程控制器课程设计报告

电机驱动与可编程控制器课程设计报告1. 引言本报告旨在介绍电机驱动与可编程控制器课程的设计内容和实施过程。
该课程旨在培养学生对电机驱动技术和可编程控制器的理解和应用能力。
2. 课程设计目标本课程的主要目标如下:- 理解电机驱动技术的基本原理和应用领域;- 掌握可编程控制器的基本原理、编程方法和应用技巧;- 能够设计和实现简单的电机驱动系统,并使用可编程控制器进行控制;- 培养学生的创新思维和实践能力。
3. 课程设计内容本课程的设计内容主要包括以下几个方面:- 电机驱动技术基础知识介绍:包括电机类型、原理、性能参数等;- 可编程控制器基础知识介绍:包括可编程控制器的结构、工作原理、编程语言等;- 电机驱动系统设计:包括电机选型、传动装置设计等;- 可编程控制器编程实践:包括编写控制程序、调试和优化等;- 实验和项目设计:通过实验和项目设计,培养学生的实践能力和团队合作精神。
4. 课程实施过程本课程的实施过程主要包括以下几个步骤:1. 理论讲授:通过课堂讲解、案例分析等方式,向学生介绍电机驱动和可编程控制器的基本原理和应用技术。
2. 实验教学:设置相关实验项目,引导学生进行实际操作和实验数据分析,加深对电机驱动和可编程控制器的理解。
3. 项目设计:组织学生进行小组项目设计,要求学生根据所学知识和实践经验,设计和实现一个具有一定复杂度的电机驱动系统,并使用可编程控制器进行控制。
4. 实践操作:鼓励学生参加实践操作,如参观工厂、实地调研等,提高学生对电机驱动和可编程控制器在实际工程中的应用能力。
5. 总结评估:通过课堂测试、项目评估等方式,对学生的研究效果进行评估和总结,及时发现问题并加以改进。
5. 课程设计评价本课程设计具有以下几个优点:- 紧密结合实际应用:通过实验和项目设计,使学生能够将所学知识应用到实际工程中,培养学生的实践能力和创新思维。
- 知识结构合理:课程设计内容层次清晰,由浅入深,循序渐进,使学生能够系统全面地掌握电机驱动和可编程控制器的相关知识。
PLC控制步进电机的实例(图与程序)

PLC控制步进电机的实例(图与程序)·采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。
由于水平有限,本实例采用非专业述语论述,请勿引用。
·FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!·PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。
·所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。
当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。
·实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。
·程序如下图:(此程序只为说明用,实用需改善。
)·说明:·在原点时将D8140的值清零(本程序中没有做此功能)·32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。
当正转动作到A点时,D8140的值是3000。
此时闭合X1,机械反转动作到B点,也就是-3000的位置。
D8140的值就是-3000。
·当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。
·当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作!·把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):·当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。
D8140的值为0·当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。
电机驱动与可编程控制器课程设计报告

电机驱动与可编程控制器课程设计报告一、摘要本报告主要介绍了电机驱动与可编程控制器课程设计的内容。
通过对电机驱动原理和可编程控制器(PLC)的深入了解,设计了一套电机驱动与控制的实验系统。
该系统包括电机驱动模块、传感器模块、PLC控制模块和执行器模块。
通过实验系统的搭建和调试,实现了对电机的精确控制和运行状态的监测。
本课程设计旨在提高学生对电机驱动技术和PLC控制技术的理解和应用能力。
二、引言电机驱动与可编程控制器技术在现代工业生产中具有广泛的应用。
电机驱动技术是指通过控制电机的电源和运行状态来实现对电机的精确控制。
可编程控制器(PLC)是一种用于自动化控制系统的数字运算控制器,可以根据用户的需求编写控制程序,实现对各种设备的自动化控制。
本课程设计旨在通过实践操作,使学生掌握电机驱动与PLC控制技术的基本原理和应用方法。
三、设计目标1. 学习电机驱动原理和驱动电路设计。
2. 学习PLC的工作原理和编程方法。
3. 设计一套电机驱动与控制的实验系统,实现对电机的精确控制和运行状态的监测。
4. 通过实验系统的搭建和调试,提高学生对电机驱动技术和PLC控制技术的理解和应用能力。
四、设计内容1. 电机驱动模块:根据电机的特性和要求,设计电机驱动电路。
包括电源电路、调速电路和保护电路等。
2. 传感器模块:选择合适的传感器,实现对电机运行状态的监测。
如温度传感器、电流传感器和速度传感器等。
3. PLC控制模块:根据控制需求,编写PLC控制程序。
包括输入输出信号的配置、逻辑控制和功能模块的调用等。
4. 执行器模块:根据PLC的控制信号,实现对电机的启动、停止、调速等操作。
如接触器、继电器和电动机等。
五、设计过程1. 电机驱动电路设计:根据电机的额定电压、电流和转速要求,选择合适的电源和调速器。
设计保护电路,确保电机的安全运行。
2. 传感器选型和安装:根据监测参数的要求,选择合适的传感器。
如温度传感器可以选择热电偶或热敏电阻,电流传感器可以选择霍尔传感器或电流互感器等。
步进电机可编程驱动控制器设计资料及例程

步进电机可编程驱动控制器【简要说明】一、尺寸:长88mmX宽68mmX高35mm二、主要芯片:AT89S52单片机、L298NL、298N(支持AT89S52编程)三、工作电压:输入电压(5V~30V)输入电压的大小由被控制电机的额定电压决定。
四、可驱动直流(5~30V之间电压的直流电机或者步进电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、转速、转向、工作方式可根据程序灵活控制6、可单独控制一台步进电机7、根据需要自己编程可以灵活控制步进电机,实现多种功能;8、可实现正反转9、采用光电隔离10、单片机P3口已用排针引出,可以方便使用者连接控制更多外围设备。
11、四位LED灯指示12、四位按键输入(可以对AT89S52单片机编程实现任何控制)13、核心控制芯片采用市场上最常用的AT89S52单片机,支持STC89C52单片机,控制方式简单,只需控制IO口电平即可!14、采用独立编码芯片L297,不用在单片机程序里编程复杂的逻辑代码和占用单片机资源。
15、设计有程序下载口,可以实时编程实时调试。
16、芯片都安装在对应的管座上,可以随时更换芯片。
17、外部连线采用旋转压接端子,使接线更牢固。
18、四周有固定安装孔。
产品最大特点:可以对AT89S52单片机编程实现任意控制被控的直流电机或者步进电机。
适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
注意啦:本产品提供例程(附带原理图以及说明!)【标注图片】【步进电机控制接线图】步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
步进电机驱动控制系统设计(有程序)

步进电机驱动控制系统设计(有程序)⽬录⼀前⾔ (1)⼆总体⽅案设计 (1)1⼯作原理 (1)2⽅案选择 (1)2.1时钟脉冲 (1)2.2脉冲分配器 (1)2.3驱动器 (1)3 总的框架 (2)三单元模块设计 (2)1单⽚机模块 (2)1.1复位控制 (3)1.2单⽚机频率 (3)2接⼝ (3)3驱动器ULN2003 (4)4按键模块 (5)5步进电机 (5)5.1⼯作原理 (5)5.2 28BYJ48型四相⼋拍 (7)四整机调试与技术指标测量 (8)五设计总结 (8)参考⽂献 (9)附录1电路原理图 (10)附录2 源程序 (11)⼀、前⾔步进电动机是⼀种将电脉冲信号转换成机械位移的机电执⾏元件,是机电⼀体化的关键产品之⼀, ⼴泛应⽤在各种⾃动化控制系统中。
随着微电⼦和计算机技术的发展,步进电机的需求量与⽇俱增,在各个国民经济领域都有应⽤。
⼆、总体⽅案设计1、⼯作原理步进电机是⼀种将电脉冲转化为⾓位移的执⾏机构。
通俗⼀点讲:当步进驱动器接收到⼀个脉冲信号,它就驱动步进电机按设定的⽅向转动⼀个固定的⾓度(及步进⾓)。
您可以通过控制脉冲个数来控制⾓位移量,从⽽达到准确定位的⽬的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从⽽达到调速的⽬的。
2、⽅案选择(1)时钟脉冲通常有两种⽅法实现:⽅案⼀直接有硬件组成如:多谐振荡器 LC 等。
⽅案⼆⽤软件的⽅式形成优点便于随时更改,调整。
为了⽅便我们选⽤软件⽅式有单⽚机实现。
(2)脉冲分配器⽅案⼀硬件环形分配器:由计数器等数字电路组成的。
有较好的响应速度,且具有直观、维护⽅便等优点。
⽅案⼆软件环分:由计算机接⼝电路和相应的软件组成的。
受到微型计算机运算速度的限制,有时难以满⾜⾼速实时控制的要求。
由软件完成脉冲分配⼯作,不仅使线路简化,成本下降,⽽且可根据应⽤系统的需要,灵活地改变步进电机的控制⽅案。
考虑到硬件设备的有限和对步进电机的控制我们选择软件环分可以有单⽚机实现。
步进电机的PLC控制系统设计方案

一、引言随着微电子技术和计算机技术的发展,可编程序控制器有了突飞猛进的发展,其功能已远远超出了逻辑控制、顺序控制的范围,它与计算机有效结合,可进行模拟量控制,具有远程通信功能等。
有人将其称为现代工业控制的三大支柱<即PLC,机器人,CAD/CAM)之一。
目前可编程序控制器<Programmable Controller)简称PLC已广泛应用于冶金、矿业、机械、轻工等领域,为工业自动化提供了有力的工具。
二、PLC的基本结构PLC采用了典型的计算机结构,主要包括CPU、RAM、ROM和输入/输出接口电路等。
如果把PLC看作一个系统,该系统由输入变量-PLC-输出变量组成,外部的各种开关信号、模拟信号、传感器检测的信号均作为PLC的输入变量,它们经PLC外部端子输入到内部寄存器中,经PLC内部逻辑运算或其它各种运算、处理后送到输出端子,它们是PLC的输出变量,由这些输出变量对外围设备进行各种控制。
三、控制方法及研究1、FP1的特殊功能简介(1> 脉冲输出FP1的输出端Y7可输出脉冲,脉冲频率可通过软件编程进行调节,其输出频率范围为360Hz~5kHz。
(2> 高速计数器<HSC)FP1内部有高速计数器,可同时输入两路脉冲,最高计数频率为10kHz,计数范围-8388608~+8388607。
(3> 输入延时滤波FP1的输入端采用输入延时滤波,可防止因开关机械抖动带来的不可靠性,其延时时间可根据需要进行调节,调节范围为1ms~128ms。
(4> 中断功能FP1的中断有两种类型,一种是外部硬中断,一种是内部定时中断。
2、步进电机的速度控制FP1有一条SPD0指令,该指令配合HSC和Y7的脉冲输出功能可实现速度及位置控制。
速度控制梯形图见图1,控制方式参数见图2,脉冲输出频率设定曲线见图3。
图1 速度控制梯形图图2 控制方式参数图3 脉冲输出频率设定曲线 3、控制系统的程序运行图4 控制系统原理图图4是控制系统的原理接线图,图4中Y7输出的脉冲作为步进电机的时钟脉冲,经驱动器产生节拍脉冲,控制步进电机运转。
可控步进电机程序设计说明
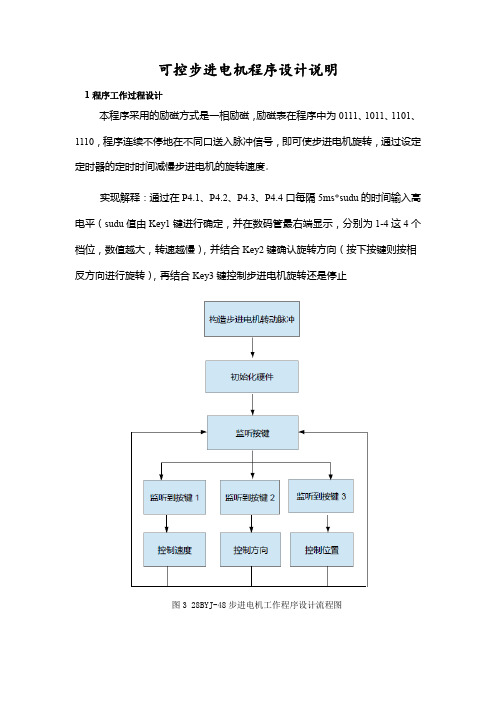
可控步进电机程序设计说明1程序工作过程设计本程序采用的励磁方式是一相励磁,励磁表在程序中为0111、1011、1101、1110,程序连续不停地在不同口送入脉冲信号,即可使步进电机旋转,通过设定定时器的定时时间减慢步进电机的旋转速度。
实现解释:通过在P4.1、P4.2、P4.3、P4.4口每隔5ms*sudu的时间输入高电平(sudu值由Key1键进行确定,并在数码管最右端显示,分别为1-4这4个档位,数值越大,转速越慢),并结合Key2键确认旋转方向(按下按键则按相反方向进行旋转),再结合Key3键控制步进电机旋转还是停止图328BYJ-48步进电机工作程序设计流程图2程序相关使用到的寄存器说明2.1定时器0和1相关寄存器设置AUXR = 0X00 //定时器0和定时器1 时钟1T模式TMOD = 0X00 //设置定时器0和定时器1 16位自动重装模式TL0 = (65536-250)%256 //设置定时0定时为 250μsTH0 = (65536-250)/256TH1 = (65536-5000*sudu)/256 //设置定时1定时为 5ms*suduTL1 = (65536-5000*sudu)%256TCON = 0X50 //定时器0和1开始计时IE = 0x8A //定时器0和1开启中断,CPU开启中断3程序设计框架及关键实现说明3.1 宏定义#define uint unsigned int//无符号整型变量#define NMAX_KEY100 //100次读取按键值(用于按键消抖)3.2全局变量uint i=1 //控制步进电机不同IO口脉冲位置uint Key1_count//周期中检测到Key1按到的次数uint Key2_count//周期中检测到Key2按到的次数uint Key3_count//周期中检测到Key3到的次数uint Key_count//周期中检测到按键按到的总次数uint sudu=1 //控制控制步进电机的速度bit Key1_C //key1当前的状态bit Key1_P //key1前一个状态bit Key2_C //key2当前的状态bit Key2_P //key2前一个状态bit Key3_C=1 //key3当前的状态bit Key3_P=1 //key3前一个状态bit flag //标记步进电机转向3.3函数void init_sys()//系统设备初始化函数void Timer0() interrupt 1 //定时按键消抖+控制转向和速度以及位置void Timer1() interrupt 3 //定时器1的中断响应函数,控制脉冲频率4.知识补充4.1辅助特殊功能寄存器AUXR该寄存器主要用来定义定时器0和1的运行频率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机可编程驱动控制器
【简要说明】
一、尺寸:长88mmX宽68mmX高35mm
二、主要芯片:AT89S52单片机、L298NL、298N(支持AT89S52编程)
三、工作电压:输入电压(5V~30V)输入电压的大小由被控制电机的额定电压决定。
四、可驱动直流(5~30V之间电压的直流电机或者步进电机)
五、最大输出电流2A (瞬间峰值电流3A)
六、最大输出功率25W
七、特点:
1、具有信号指示
2、转速可调
3、抗干扰能力强
4、具有续流保护
5、转速、转向、工作方式可根据程序灵活控制
6、可单独控制一台步进电机
7、根据需要自己编程可以灵活控制步进电机,实现多种功能;
8、可实现正反转
9、采用光电隔离
10、单片机P3口已用排针引出,可以方便使用者连接控制更多外围设备。
11、四位LED灯指示
12、四位按键输入(可以对AT89S52单片机编程实现任何控制)
13、核心控制芯片采用市场上最常用的AT89S52单片机,支持STC89C52单片机,控制方式简单,只需控制IO口电平即可!
14、采用独立编码芯片L297,不用在单片机程序里编程复杂的逻辑代码和占用单片机资源。
15、设计有程序下载口,可以实时编程实时调试。
16、芯片都安装在对应的管座上,可以随时更换芯片。
17、外部连线采用旋转压接端子,使接线更牢固。
18、四周有固定安装孔。
产品最大特点:可以对AT89S52单片机编程实现任意控制被控的直流电机或者步进电机。
适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
注意啦:本产品提供例程(附带原理图以及说明!)
【标注图片】
【步进电机控制接线图】
步进电机的控制实例
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:
1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路
根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)
三、控制步进电机的速度
如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
四、此板驱动步进电机测试程序
说明:以AT89S52单片机控制单元,C语言编程!
【测试程序】
/********************************************************************
汇诚科技
实现功能:正转_反转_减速_加速程序
使用芯片:AT89S52 或者 STC89C52
晶振:
编译环境:Keil
作者:zhangxinchun
淘宝店:汇诚科技
【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!
*********************************************************************/ #include<>
#define uchar unsigned char
#define uint unsigned int
uchar Y=10; //初始化速度
/********************************************************
控制位定义
********************************************************/
sbit shi_neng=P1^0; // 使能控制位
sbit fang_shi=P1^1; // 工作方式控制位
sbit fang_xiang=P1^2;// 旋转方向控制位
sbit mai_chong=P1^3; // 脉冲控制位
sbit zheng_zhuan=P2^0; // 正转
sbit fan_zhuan=P2^1; // 反转
sbit jia_su=P2^2; // 加速
sbit jian_su=P2^3; // 减速
/********************************************************
延时函数
********************************************************/
void delay(uchar i)//延时函数
{
uchar j,k;
for(j=0;j<i;j++)
for(k=0;k<180;k++);
}
/********************************************************
加速函数
********************************************************/ void jia()
{
Y=Y-1;
if(Y<=1){Y=1;}//如果速度值小于等于1,值保持不变
}
/********************************************************
减速函数
********************************************************/ void jian()
{
Y=Y+1;
if(Y>=100){Y=100;}
}
/********************************************************
主函数
********************************************************/
main()
{
shi_neng=0; // 使能控制位
fang_shi=1; // 工作方式控制位
fang_xiang=1;// 旋转方向控制位
mai_chong=1; // 脉冲控制位
while(1)
{
if(zheng_zhuan==0){shi_neng=1;fang_xiang=1;}
if(fan_zhuan==0){shi_neng=1;fang_xiang=0;}
if(jia_su==0){delay(10);while(!jia_su);jia();}
if(jian_su==0){delay(10);while(!jian_su);jian();}
mai_chong=~mai_chong; //输出时钟脉冲
delay(Y); //延时(括号内数值越小,电机转动速度越快) }
}/********************************************************
结束
********************************************************/
【图片展示】。