基于TMS320F28335的微位移步进电机控制系统设计
基于TMS320F28335的无刷直流电机控制器设计

且 超调 量较 小 ,稳定 ห้องสมุดไป่ตู้较 好 ,证 明了 控制 器设 计 的正 确性和 合理 性 。 关键 词 :T MS 3 2 0 F 2 8 3 3 5;无 刷直 流 电机 ;P l D;控 制器
wa t c h . Mo r e o v e r , t h r o u g h wa t c h i n g a n d a n a l y z i n g t h e d i f e r e n c e s o f s p e e d v a r i a t i o n s a b o u t c l o s e d — l o o p c o n t r o l s y s t e m, we c a n k n o w t h a t t h e B L D C M c on t r o l l e r b a s e d o n d o u b l e c l o s e d l o o p c o n t r o l wh i c h wa s d e s i g n e d i n t h i s p a p e r c o u l d wo r k n o r ma l l y , a n d c o mp a r e d wi t h t h e o p e n l o o p c o n t r o l B L D CM c o n t r o l l e r i n t h e ma r k e t , t h e c on t r o l s y s t e m h a s t h e a d v a n t a g e s o f s ma l l o v e r s h o o t , g o o d s t a b i l i t y a n d f a s t r e s p o n s e wh i c h t o o k l e s s t h a n i s f r o m o r i g i n a l s p e e d t o t h e g i v e n r o t a t i n g s p e e d . T h a t p r o v e s t h e c o r r e c t n e s s a n d r a t i on a l i t y o f t h e c o n t r o l l e r d e s i g n . K e y wo r d s : T MS 3 2 0 F 2 8 3 3 5 : B r u s h l e s s D C mo t o r ; P I D : C o n t r o l l e r
基于TMS320F28335的SVPWM实现方法

基于TMS320F28335的SVPWM实现方法SVPWM/TMS320F28335/DSP/电机控制1引言随着电机控制理论的日趋成熟和微处理器的不断优化,脉宽调制(PWM)技术在变频器中得到了广泛的应用。
如今,PWM开关信号的控制方法最常见的有正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)。
与SPWM方法相比,SVPWM方法具有电压谐波小,直流电压利用率高,电动机的动态响应快,减少电动机的转矩脉动,易于实现数字化等显著的优点,从而使SVPWM方法的实际应用愈来愈广泛[1,5]。
TMS320F28335数据信号处理器是TI公司最新推出的32位浮点DSP控制器,具有150MHz的高速处理能力,18路PWM输出,与TI前几代数字信号处理器相比,性能平均提高了50%,并可与定点C28x控制器软件兼容[2,3]。
其浮点运算单元,可以显著地提高控制系统的控制精度和处理器的运算速度,是目前控制领域最先进的处理器之一。
可以应用到参数辨识等需要大运算量的电机实时控制系统中。
以下介绍基于TMS320F28335的SVPWM基本原理和实现方法。
2 SVPWM的基本原理SVPWM是利用逆变器的功率开关器件的不同开关组合合成有效电压矢量来逼近基准圆[4.5]。
图1为三相电压源逆变器(VSI)的拓扑结构[2.3]。
图1三相电压型逆变器为便于分析理解,图1可以简化为图2所示。
图2三相电压型逆变器电路桥在图1中,V a、V b、V c是逆变器的输出相电压,Q1~Q6为6个功率开关晶体管,它们分别由a,a’,b,b’,c,c’个控制信号控制。
当逆变器上桥臂的一个功率开关晶体管开通状态(a或b 或c为1)时,下半桥臂的相对功率开关晶体管必须为关闭状态(a’或b’或c’为0);同理,当下桥臂开关晶体管为开通状态(a’或b’或c’为1)时上桥臂的相对功率开关晶体管必须为关闭状态(a或b或c为0)。
对于图1、图2所示的逆变器,其开关状态组合(c b a)有8种基本工作状态,即:000、001、010、011、100、101、110、111,其中除了000和111工作状态为无效状态,称为零矢量外,其余六种工作状态为有效状态,称为非零矢量。
基于TMS320F28335的永磁同步电机矢量控制器设计

基于TMS320F28335的永磁同步电机矢量控制器设计严勤;李永聪【摘要】为了提高电动汽车用永磁同步电机控制性能,设计了一款以浮点型TMS320F28335数字信号处理器(DSP)为控制核心的数字化矢量控制器.与采用TMS320LF2407、TMS320F2812等传统定点型DSP为控制核心的永磁同步电机控制器相比,其具有编程简单、运算速度快、片内A/D精度高等优势.文章详细介绍了IGBT模块、温度模块以及各信号采集与调理电路等硬件部分的设计;软件部分,以C语言和汇编语言混合编程,基于TI公司提供的开发系统编写了电机控制程序.该控制器与传统的以定点型DSP芯片为控制核心的驱动控制器相比,提高了运算速度和控制精度,且易于编程,保护功能完善.【期刊名称】《贵州电力技术》【年(卷),期】2018(021)006【总页数】7页(P63-69)【关键词】永磁同步电机;矢量控制;控制器;TMS320F28335【作者】严勤;李永聪【作者单位】贵阳职业技术学院,贵州贵阳550081;贵州大学机械工程学院,贵州贵阳550025【正文语种】中文【中图分类】U271永磁同步电动机(PMSM)因其优良的性能在电动汽车牵引电机上被广泛应用[1-2],文章以电动汽车用内置式永磁同步电动机为对象,研究设计了电动汽车用永磁同步电动机的驱动控制器。
在分析PMSM矢量控制理论与方法的基础上,设计了驱动控制器硬件电路,以及控制逻辑和程序等软件部分。
该控制器以浮点型DSPTMS320F28335芯片为核心,与传统定点型DSP相比,能够执行更复杂的浮点运算,A/D转换精度更高和速度更快,且具有性能稳定、集成度好的优点。
1 总体方案设计此次设计的PMSM驱动控制器的硬件系统主要由两部分组成,即主控制板部分和驱动板部分。
在此系统中,主控制板是核心部分,它主要实现三相电流的信号采集,主电路电压信号采集,位置信号采集,温度信号采集,数据处理,控制系统的输出,通过CAN总线接口电路对外通信等功能。
TMS320F28335及其最小应用系统设计

MS320F28335及其最小应用系统设计TMS320F28335型数字信号处理器是TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件的精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
它采用内部供电,外部供电,因而功耗大大降低。
且主频高达150 MHz,处理速度快,是那些需要浮点运算便携式产品的理想选择。
2 TMS320F28335简介TMS320F28335采用176引脚LQFP四边形封装。
其主要性能如下:高性能的静态CMOS技术,指令周期为ns,主频达150MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256K(64K)*l6的Flash存储器,34K(18K)*l6的SARAM存储器.1K*16 OT PROM和8K(4K)*l6的Boot ROM。
其中Flash,OTPROM,16K*l6的SARAM均受密码保护;带()的为2808控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPIO0~ GPIO63连接到该中断。
GPI00-GPI031连接到XINTl,XINT2及XNMI外部中断,G Pl032~GPI063连接到XINT3-XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRP WM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到P IE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。
基于TMS320F28335无刷直流电动机换向调速系统设计

基于TMS320F28335无刷直流电动机换向调速系统设计北京信息科技大学的研究人员李萍、刘国忠,在2015年第7期《电气技术》杂志上撰文,无刷直流电动机具有高效、节能、寿命长等显著特点而广泛应用于国民经济发展的各个领域,研究其换向调速控制技术对提高系统性能具有重要意义。
针对传统无刷直流电动机控制精度较低、响应速度较慢的问题,设计了基于TMS320F28335浮点型高性能DSP控制器的无刷直流电机双闭环PID调速系统,包括换向功率驱动硬件电路系统和信息处理及PWM控制调速软件系统。
通过试验调试,表明所设计系统实现电机换向调速功能,系统运行平稳,具有良好的动态、静态特性。
1 引言无刷直流电动机由于其结构简单、出力大、效率高、寿命长、噪声低等特点,已在国防、航空航天、机器人、工业过程控制、汽车电子、精密机床、家用电器等领域得到广泛应用。
目前,对于无刷直流电机的控制主要采用专用集成电路控制器[1、2]。
专用集成电路控制器结构简单、性价比高、外围器件比分离式控制器少,但在应用中会受到功能扩展性差,不易进行产品功能变化和升级操作等方面的制约,而更多地转向能够灵活自主设计系统软、硬件方面,常采用FPGA、单片机实现对电机的控制。
随着DSP的广泛应用,其在数据处理速度和强大的外设处理能力方面,逐步成为电机控制领域的首选。
本文介绍以DSP TMS320F28335控制器为核心,设计无刷直流电机调速系统包括硬件电路和控制软件。
2 无刷直流电动机调速原理常用的无刷直流电动机是由电机本体、具有电子换向功能的功率驱动电路和位置传感器三部分组成。
将电机设计成由铁芯中嵌有三相对称Y型接法的定子绕组和由一定极对数镶嵌于铁芯永磁体的转子构成电机本体。
由于无刷直流电机取消了电刷,安装在转子上的传感器检测转子转动位置,控制与电机定子绕组连接的换向功率驱动电路,确保定子电流导通相所产生的电枢磁场与转子永磁体的磁场方向在电机运行过程中始终保持互相垂直,从而获得最大转矩,驱动电机运转[3]。
基于TMS320F28335DSP控制PMSM的硬件设计
基于TMS320F28335DSP控制PMSM的硬件设计作者:沈丽张苏新来源:《硅谷》2014年第20期摘要永磁同步电机(PMSM)的动态数学模型是一个高阶、非线性、强耦合的变量系统,其控制要求处理器的数字信号处理能力非常高,TI公司2000系列的DSP是专门为电机控制开发的处理器,从最初的LF2407发展到后来F2812,由于其只能控制定点型数据,对于复杂电机数据处理还是有所限制。
本文采用了TI公司最新的TMS320F28335,能够控制浮点型数据,对于PMSM的控制带来极大的方便,本文以F28335控制器为核心,并配以采样电路、驱动电路、保护电路等,设计了一套基于TMS320F28335控制的PMSM硬件系统。
关键词 PMSM;TMS320F28335;电路;硬件系统中图分类号:TM614 文献标识码:A 文章编号:1671-7597(2014)20-0021-0220世纪上半叶,直流电力拖动系统由于其优越的调速性能,占据了电力拖动总容量的80%以上,但其电刷和换向器必须经常维修,限制了其应用。
到20世纪70年代,随着电力电子技术的发展,使得采用电力电子变换器的交流拖动系统得以实现,同时交流电机相比于直流电机,具有结构简单,成本低廉、工作可靠、效率高等优点,使得交流拖动成为主要发展方向。
交流电机有异步电机和同步电机两类。
同步电机由于其转速与电源频率保持严格的同步,对于控制恒速系统较好,而工农业生产中有大量的生产机械要求连续地以大致不变的速度单方向运行,例如风机、泵、压缩机、普通机床等。
由于同步电机功率因数高,在一个车间里,配备几台大容量的水泵、空气压缩机,能够改善功率因数,对节能环保具有十分重要的作用。
因此,控制好同步电机对工农业及节能环保具有重要的意义。
1 PMSM的数学模型在分析永磁同步电机的数学模型时,一般做以下假设。
1)三相电网电压幅值、相位、频率都能满足要求。
2)忽略磁路饱和,同时不考虑涡流和磁阻效应。
基于TMS320F28335的新型数字电机驱动器的设计与分析
机床与液压
MACHI NE T 0OL & HYDRAULI CS
De c . 2 01 3 Vo 1 . 41 No . 2 3
D OI :1 0 . 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 2 3 . 0 2 4
基于 T M S 3 2 0 F 2 8 3 3 5的新 型 数字 电机驱 动 器 的设 计 与 分析
陈 明方 ,邹 平 ( 1 .东北大学机械 工程与 自 动化 学院,辽宁沈阳 1 1 0 8 1 9 ;
2 .沈 阳职 业技 术 学 院 电气工程 系,辽 宁沈 阳 1 1 0 0 4 5 )
2. De p a tme r n t o f El e c t r i c a l En g i n e e r i n g, S h e n y a n g Vo c a t i o n a l a n d Te c h ni c a l Co l l e g e,
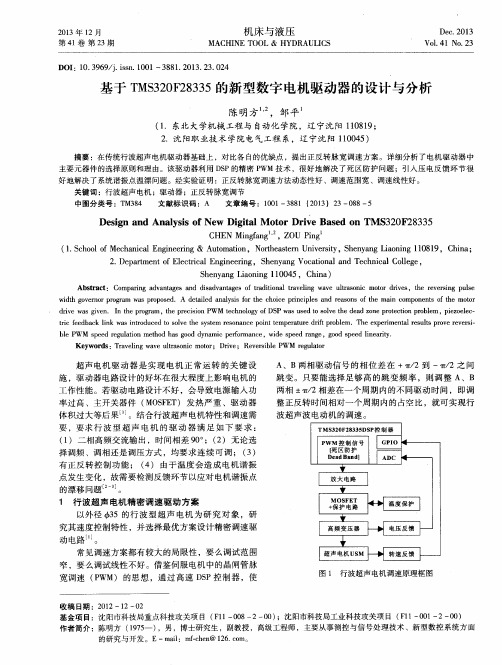
摘要 :在传统行波超声 电机驱动器基础上 ,对 比各 自的优缺点 ,提 出正反转脉 宽调速方 案。详细分析 了 电机驱 动器 中 主要元器件 的选择原则和理 由。该驱动器利用 D S P的精密 P WM 技术 ,很好 地解决 了死 区防护 问题 ;引入压 电反馈环 节很 好地解决 了系统谐振点温漂 问题 。经实验证 明 :正反转脉 宽调 速方 法动态性好 、调速范围宽 、调速线性好 。
wi d t h g o v e r n o r p r o g r a m w a s p r o p o s e d .A d e t a i l e d a n ly a s i s f o r t h e c h o i c e p in r c i p l e s a n d r e a s o n s o f t h e ma i n c o mp o n e n t s o f t h e mo t o r
基于TMS320F28335的电机控制系统设计

基于TMS320F28335的电机控制系统设计电机控制系统在现代工业中起着举足轻重的作用,它被广泛应用于机器人、自动化生产线、电力传输等领域。
随着科技的发展,数字控制系统已经逐渐取代了传统的模拟控制系统,成为了电机控制系统中的主流。
在数字控制系统中,单片机芯片作为控制核心,成为了实现电机控制的重要工具。
本文将基于TMS320F28335单片机芯片,介绍电机控制系统的设计过程。
一、单片机选型在电机控制系统中,单片机芯片作为控制核心至关重要。
因此,单片机的选型是设计过程中最为关键的一步。
TMS320F28335作为一款高性能的DSP芯片,在数字控制系统中广泛应用。
TMS320F28335内置了多个PWM模块、模拟转换器、CAN总线等外设,可以支持多种电机的控制。
二、硬件设计电机控制系统的硬件设计包括电机驱动器、控制板、驱动模块等。
其中,电机驱动器通常使用功率半导体器件,如IGBT、MOSFET等。
控制板上包括单片机、PWM模块、模拟转换器等。
驱动模块是将单片机产生的PWM信号转换成可以驱动电机的电平信号的模块。
根据具体的控制要求,还可以加入如编码器、位置传感器等反馈元件。
三、软件设计电机控制系统的软件设计主要包括控制算法、PID参数的调试以及驱动程序的编写。
控制算法需要根据电机的类型和控制要求进行设计,常见的有矢量控制、FOC控制、直接转矩控制等。
PID 参数的调试是优化控制算法的一个重要步骤,需要根据实际情况进行逐步调整。
驱动程序的编写主要是将控制算法转化为可以在单片机上运行的程序。
四、调试实验在完成软硬件设计之后,需要进行实验调试。
首先进行板级调试,检验电路是否正常。
然后进行控制算法的调试,测试控制效果以及PID参数的设置合理性。
最后进行整个系统的调试。
在实验过程中,还需要注意电机的安全操作。
五、应用场景基于TMS320F28335的电机控制系统可以应用于多种不同类型的电机控制,如直流电机、交流电机、步进电机等。
基于TMS320F28335 DSP微处理器的最小系统设计
本科课程设计报告(2016至2017学年第一学期)设计题目:基于TMS320F28335 DSP微处理器的最小系统设计课程名称:数字信号处理专业名称:电子信息工程行政班级: 1313学号: 1313姓名:洪指导教师:赵报告时间: 2016 年 10 月 23 日目录一、引言TMS320F28335型数字信号处理器TI公司的一款TMS320C28X系列浮点DSP控制器。
与以往的定点DSP相比,该器件精度高,成本低,功耗小,性能高,外设集成度高,数据以及程序存储量大,A/D转换更精确快速等。
TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和 EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出 (HRPWM),12位16通道ADC。
得益于其浮点运算单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSC相比,平均性能提高50%,并与定点C28x控制器软件兼容,从而简化软件开发,缩短开发周期,降低开发成本。
F2833X在保持150MHz时钟速率不变的情况下,新型F2833X浮点控制器与TI前代领先数字信号控制器相比,性能平均提高50%。
与作用相当的32位定点技术相比,快速傅立叶转换(FFT)等复杂计算算法采用新技术后性能提升了一倍之多。
二、设计目的TMS320F28335及其最小应用系统是最基本的硬件和软件环境。
设计目的是能使用Protel设计电路原理图;了解F28335硬件的相关知识及电路设计;能使用CCS建立并调试DSP工程。
通过F28335最小电路的设计,可以将理论与实践统一联系,更深入地理解F28335的开发方法。
三、设计要求1、利用Protel软件绘制并添加TMS320F28335的原理图库;2、利用Protel软件绘制TMS320F28335最小系统的电路原理图,包括时钟电路模块,电源模块、复位电路模块、JTAG接口模块;3、安装最小系统电路,在CCS下建立工程,编译并将其下载到TMS320F28335最小系统中运行。
基于TMS320F28335的伺服驱动器的设计
基于TMS320F28335的伺服驱动器的设计【摘要】本文设计了一种基于DSP的交流伺服电机驱动器的组成和总体设计方案。
该驱动器采用TMS320F28335为核心控制电路,设计完成了驱动电路和人机交互界面电路,同时完成了软件程序设计。
【关键词】DSP;伺服驱动器;TMS320F28335引言伺服驱动系统是机电一体化技术的重要组成部分,随着现代工业的快速发展,交流伺服系统逐渐成为工业伺服系统的主流,在数控机床、工业控制等自动化装备中得到广泛的应用。
本文介绍了一种基于TMS320F28335的伺服驱动器设计方案。
TMS320F28335是TI公司设计的一款数字信号处理器,其主要面向工业控制领域,特别适用于电机控制、运动控制等应用。
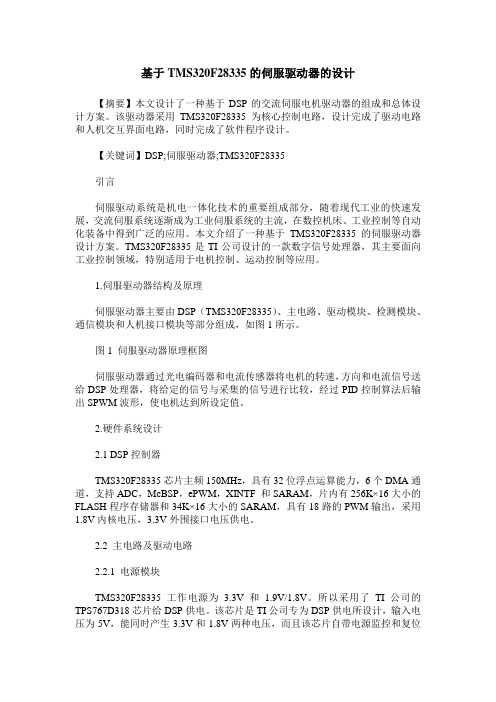
1.伺服驱动器结构及原理伺服驱动器主要由DSP(TMS320F28335)、主电路、驱动模块、检测模块、通信模块和人机接口模块等部分组成,如图1所示。
图1 伺服驱动器原理框图伺服驱动器通过光电编码器和电流传感器将电机的转速,方向和电流信号送给DSP处理器,将给定的信号与采集的信号进行比较,经过PID控制算法后输出SPWM波形,使电机达到所设定值。
2.硬件系统设计2.1 DSP控制器TMS320F28335芯片主频150MHz,具有32位浮点运算能力,6个DMA通道,支持ADC,McBSP,ePWM,XINTF 和SARAM,片内有256K×16大小的FLASH程序存储器和34K×16大小的SARAM,具有18路的PWM输出,采用1.8V内核电压,3.3V外围接口电压供电。
2.2 主电路及驱动电路2.2.1 电源模块TMS320F28335工作电源为 3.3V和 1.9V/1.8V。
所以采用了TI公司的TPS767D318芯片给DSP供电。
该芯片是TI公司专为DSP供电所设计,输入电压为5V,能同时产生3.3V和1.8V两种电压,而且该芯片自带电源监控和复位功能。
基于F28335无位置传感器BLDC控制系统设计

机电技术 2012年12月28基于F28335无位置传感器BLDC控制系统设计朱勇冯开平(广东工业大学,广东广州 510000)摘要:在电动机控制系统中引入DSP技术不仅实现系统的全数字化,而且同时大大提高控制系统的精度、实时性和可靠性。
直流无刷电动机无位置传感器控制是近年来国内外研究的热点。
文章设计了一种基于美国TI公司生产的TMS320F28335型DSP芯片的无刷直流电动机无位置传感控制系统,介绍了其基本结构和工作原理。
试验结果表明,该系统具有较好的动态和静态特性,电机运行的可靠性高。
关键词:DSP;无刷直流电机;无位置传感器中图分类号:TM33 文献标识码:A 文章编号:1672-4801(2012)06-028-03无刷直流电动机(BLDCM)既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的无励磁损耗、调速性能好、运行效率高等诸多优点,且无机械换向,具有体积小、重量轻、转矩大等特点,因而在各个领域得到广泛应用。
但传统的无刷直流电机需要在电机本体上安装位置传感器,它的存在给永磁无刷直流电机的制造和应用带来了很多不便,甚至可以说是缺陷[1]。
采用无位置传感器的无刷直流电机可以很好的避免这些缺陷所带来的问题。
随着计算机技术、电力电子技术、微电子技术和现代控制理论的飞速发展,直流电动机控制系统正逐渐向数字化、智能化方向发展。
近年来,DSP芯片制造和使用技术的不断成熟,基于DSP的无刷直流电动机控制系统的研究越来越被人们所重视。
TMS320F28335是TI公司新推出的一款浮点型数字信号处理器,在保持原有DSP芯片优点的同时,能够执行复杂的浮点运算,可以节省代码执行时间和存储空间,具有精度高,成本低,功耗小,外设集成度高等优点,为嵌入式工业硬功提供更加优秀的性能和更加简单的软件设计[2]。
本研究提出了以TI 公司的TMS320F28335芯片为主控芯片,采用三相Y形联结三相全控桥式电路两两通电方式实现对无刷直流电机的无位置传感器控制。
基于TMS320F28335的步进电机的控制
DSP控制器原理及应用课程报告基于TMS320F28335的步进电机控制小组成员:张东海指导教师:陈刚副教授2016年12月组员分工目录1 绪论 (1)1.1课题提出的背景 (1)1.2 DSP 的发展及应用 (2)1.3 本课题主要工作 (3)2步进电动机的选择及其驱动控制 (5)2.1 步进电动机概述 (5)2.1.1步进电动机分类 (5)2.1.2 步进电机的步距角 (5)2.1.3 步进电机的相数 (7)2.2 步进电动机的选择 (7)2.3 步进电动机的驱动 (8)2.3.1 驱动系统的组成 (8)2.3.2 驱动器的特点 (9)2.4 驱动器的选择 (10)2.4.1 L297/L298 芯片的介绍 (10)2.4.2 L297 芯片的工作原理 (10)2.4.3 驱动硬件的体系结构 (11)3 系统硬件设计 (11)3.1 DSP 系统的设计流程 (11)3.2 DSP 控制器件的基本结构和特征 (12)3.3 TMS320LF2407 的内部结构及组成 (15)3.3.1 芯片的选型 (15)3.3.2 MS3T20LF2407 芯片体系结构围设备。
(15)3.4 步进电机的DSP 控制 (17)3.4.1 芯片在电机控制中的应用 (17)3.4.2 步进电机的DSP 控制原理 (17)3.5 系统硬件设计说明 (19)3.5.1 时钟电路设计 (19)3.5.2 复位电路设计 (20)3.5.3 外部存储器设计 (21)3.5.4 JTAG 仿真 (22)3.5.5电源模块 (23)3.5.6 按键接口设计电路 (23)3.5.7 隔离电路 (23)4 控制系统软件部分的设计 (25)4.1 软件设计的基本思想 (25)4.2 主程序设计与分析 (26)4.3 系统初始化程序 (26)4.3.1 变量初始化 (27)4.3.2 系统初始化 (28)4.3.3 I/O 口初始化 (28)4.3.4 PWM 初始化 (28)4.4 键盘扫描和服务程序 (28)4.5 中断服务程序 (28)5 实验结果分析 (31)5.1 实物图 (31)5.2 实验结果及其分析 (32)6 心得体会和工作总结 (33)摘要摘要电动机控制是工业自动化进程中一个相当重要的组成部分,随着工业自动控制对电动机控制产品需求的不断增加,现代电动机控制技术也变得越来越重要,微处理器已经广泛用于电动机控制领域。
基于TMS320F28335的SVPWM实现方法
基于TMS320F28335的SVPWM实现方法SVPWM/TMS320F28335/DSP/电机控制1引言随着电机控制理论的日趋成熟和微处理器的不断优化,脉宽调制(PWM)技术在变频器中得到了广泛的应用。
如今,PWM开关信号的控制方法最常见的有正弦脉宽调制(SPWM)和空间矢量脉宽调制(SVPWM)。
与SPWM方法相比,SVPWM方法具有电压谐波小,直流电压利用率高,电动机的动态响应快,减少电动机的转矩脉动,易于实现数字化等显著的优点,从而使SVPWM方法的实际应用愈来愈广泛[1,5]。
TMS320F28335数据信号处理器是TI公司最新推出的32位浮点DSP控制器,具有150MHz的高速处理能力,18路PWM输出,与TI前几代数字信号处理器相比,性能平均提高了50%,并可与定点C28x控制器软件兼容[2,3]。
其浮点运算单元,可以显著地提高控制系统的控制精度和处理器的运算速度,是目前控制领域最先进的处理器之一。
可以应用到参数辨识等需要大运算量的电机实时控制系统中。
以下介绍基于TMS320F28335的SVPWM基本原理和实现方法。
2 SVPWM的基本原理SVPWM是利用逆变器的功率开关器件的不同开关组合合成有效电压矢量来逼近基准圆[4.5]。
图1为三相电压源逆变器(VSI)的拓扑结构[2.3]。
图1三相电压型逆变器为便于分析理解,图1可以简化为图2所示。
图2三相电压型逆变器电路桥在图1中,V a、V b、V c是逆变器的输出相电压,Q1~Q6为6个功率开关晶体管,它们分别由a,a’,b,b’,c,c’个控制信号控制。
当逆变器上桥臂的一个功率开关晶体管开通状态(a或b 或c为1)时,下半桥臂的相对功率开关晶体管必须为关闭状态(a’或b’或c’为0);同理,当下桥臂开关晶体管为开通状态(a’或b’或c’为1)时上桥臂的相对功率开关晶体管必须为关闭状态(a或b或c为0)。
对于图1、图2所示的逆变器,其开关状态组合(c b a)有8种基本工作状态,即:000、001、010、011、100、101、110、111,其中除了000和111工作状态为无效状态,称为零矢量外,其余六种工作状态为有效状态,称为非零矢量。
基于TMS320F28335的伺服驱动器的设计
基于TMS320F28335的伺服驱动器的设计【摘要】本文设计了一种基于DSP的交流伺服电机驱动器的组成和总体设计方案。
该驱动器采用TMS320F28335为核心控制电路,设计完成了驱动电路和人机交互界面电路,同时完成了软件程序设计。
【关键词】DSP;伺服驱动器;TMS320F28335引言伺服驱动系统是机电一体化技术的重要组成部分,随着现代工业的快速发展,交流伺服系统逐渐成为工业伺服系统的主流,在数控机床、工业控制等自动化装备中得到广泛的应用。
本文介绍了一种基于TMS320F28335的伺服驱动器设计方案。
TMS320F28335是TI公司设计的一款数字信号处理器,其主要面向工业控制领域,特别适用于电机控制、运动控制等应用。
1.伺服驱动器结构及原理伺服驱动器主要由DSP(TMS320F28335)、主电路、驱动模块、检测模块、通信模块和人机接口模块等部分组成,如图1所示。
图1 伺服驱动器原理框图伺服驱动器通过光电编码器和电流传感器将电机的转速,方向和电流信号送给DSP处理器,将给定的信号与采集的信号进行比较,经过PID控制算法后输出SPWM波形,使电机达到所设定值。
2.硬件系统设计2.1 DSP控制器TMS320F28335芯片主频150MHz,具有32位浮点运算能力,6个DMA通道,支持ADC,McBSP,ePWM,XINTF 和SARAM,片内有256K×16大小的FLASH程序存储器和34K×16大小的SARAM,具有18路的PWM输出,采用1.8V内核电压,3.3V外围接口电压供电。
2.2 主电路及驱动电路2.2.1 电源模块TMS320F28335工作电源为 3.3V和 1.9V/1.8V。
所以采用了TI公司的TPS767D318芯片给DSP供电。
该芯片是TI公司专为DSP供电所设计,输入电压为5V,能同时产生3.3V和1.8V两种电压,而且该芯片自带电源监控和复位功能。
基于TMS320F28335的小型导航计算机系统设计
收稿日期:2009-06-03作者简介:刘明(1973—),男,云南会泽人,高级工程师,博士研究生,主要研究领域为水下航行器组合导航。
基于T MS320F28335的小型导航计算机系统设计刘 明(西北工业大学航海学院,陕西西安 710072)摘要:设计了一种基于新型浮点DSP ———T MS320F28335的小型导航计算机取代以往基于双处理器结构的同类系统,完成6路模拟量和3路数字量实时采集的同时,实现低成本大容量的非易失数据存储,其浮点运算能力满足导航算法需求,双CAN 总线接口可接驳多种上位机,通过片内高速数据交换通道还可扩展高性能DSP 阵列。
跑车试验表明,该设计用更小的体积和功耗实现了低成本导航计算机系统。
关键词:惯性导航系统;导航计算机;数字信号处理器中图分类号:U666.125 文献标识码:A 文章编号:1000-8829(2009)12-0036-04D esi gn of M i n i a ture Nav i ga ti on Co m puter Syste m Ba sed on T M S 320F 28335L I U M ing(School of Marine Engineering,North western Polytechnical University,Xi ’an 710072,China )Abstract:An m iniature navigati on computer syste m based on ne w type fl oating 2point DSP ———T MS320F28335is designed t o rep lace si m ilar syste m on dual 2p r ocess ors .Six channels of anal og signal and three channels of digital signal are real 2ti m e sa mp led and saved in a l ow 2cost nonvolatile large me mory .The computing capability of fl oating 2point unit can satisfy perfor mance require ments of navigati on algorithm.Dual CAN can be shared with several kinds of upper computer .DSP array is constructed by on 2chi p high s peed interface .Gr ound vehicle test indicates that a l ower cost navigati on computer syste m with s maller volume and po wer consump ti on is real 2ized .Key words:I N S;navigati on computer;DSP 近几年来,基于GPS 、ME MS -I M U 、磁通门罗盘、里程计等传感器的小型车载组合导航系统备受关注,设计这一类系统所面临的挑战是如何在给定的导航精度下不断降低成本、体积和功耗。
基于TMS320F28035电动汽车电机控制器解读

2011-2012德州仪器C2000及MCU创新设计大赛项目报告题目:基于TMS320F28035电动汽车用电机控制器学校:重庆大学组别:专业组应用类别:先进控制类平台:C2000题目:基于TMS320F28035电动汽车电机控制器摘要:21世纪,纯电动汽车已经成为了解决燃油车辆带来的能源和环境问题的最有希望的方案之一。
而电动汽车电机控制器又是纯电动汽车的核心部分。
本设计以TI公司的TMS320F28035为控制核心,设计了一款用于电动汽车的低压电机控制器,采用先进的弱磁控制算法和效率优化策略,实现了电机在整个运行范围内输出最大转矩和达到较高的效率。
Abstract:ELECTRIC vehicles (EV) are seen as a possible step towards the solution of the pollution problem in urban environment. And the motor controller is core of the electric vehicle. Based on TMS320F28035 ,we design a motor controller used in low voltage EV. With the advanced control scheme ,we can get the maximum torque in the whole speed range and the maximum efficiency.1引言1.1系统设计的背景20世纪90年代以来,汽车作为人类最重要的代步和交通工具,在全球范围内得到蓬勃快速发展。
其实世界汽车工业总共发展了100多年,已经成为世界上许多国家的支柱产业,在人类经济生活和生产中发挥着举足轻重的作用。
进入21世纪,在今后的50年里,全球人口将从60亿增加到100亿,汽车的数量将从7亿增加到25亿。
基于TMS320F28335的永磁同步电机数字化矢量控制器设计
基于TMS320F28335的永磁同步电机数字化矢量控制器设计陈高;杨家强【摘要】In order to improve the performance of vector controller, a digital vector controller for permanent magnet synchronous motor (PMSM) based on float-point digital signal processor(DSP) TMS320F28335 was designed. Compared with the conventional PMSM control system based on fixed-point DSP such as TMS320LF2407 and TMS320F2812, it had advantages in programming, computing speed and accuracy of A/D. The main circuit used the AC-DC-AC topology structure. The voltage, current signals were sampled by internal A/D of TMS320F28335. Speed and position were measured in the enhanced quadrature encoder pulse (EQEP) module based on incremental photoelectric encoder. And software and hardware double protection circuits were designed. The high-precision space vector pulse width modulation (SVPWM) signals can be generated flexibly in the enhanced pulse width modulator (EPWM) module. The experimental results indicate that this control system has advantages of simple programming, fast computing speed and flexible control.%为了提高永磁同步电机控制器的控制性能,设计和开发了一套以浮点型TMS320F28335数字信号处理器(DSP)为控制核心,主回路为“交-直-交”拓扑结构的永磁同步电机数字化矢量控制器.与采用TMS320LF2407、TMS320F2812等传统定点型DSP为控制核心的永磁同步电机控制器相比,其具有编程简单、运算速度快、片内A/D精度高等优势.该控制器使用TMS320F28335的内部A/D采样电压、电流信号;采用增量式光电编码器与DSP自带的增强型正交编码脉冲(EQEP)模块测量转速和位置.控制器有软件、硬件两种保护;并充分利用DSP的增强型PWM( EPWM)模块,能灵活生成高精度的空间矢量脉宽调制(SVPWM)信号.实验结果证明,控制器具有编程简单、运算速度快、控制灵活等特点.【期刊名称】《机电工程》【年(卷),期】2011(028)009【总页数】5页(P1090-1094)【关键词】永磁同步电机;数字信号处理器;矢量控制器;增强型正交编码脉冲;空间矢量脉宽调制【作者】陈高;杨家强【作者单位】浙江大学电气工程学院,浙江杭州310027;浙江大学电气工程学院,浙江杭州310027【正文语种】中文【中图分类】TM341;TP2730 引言永磁同步电动机(PMSM)具有结构简单、运行可靠、体积小、重量轻,以及较高的效率和功率因数等优点,因此在高性能的伺服驱动等领域具有广阔的应用空间[1-4]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10μm。
DSP Power Reference Design. Reference Design,
系统总体调试:
SLVA296A-February 2008.
现阶段系统调试结果为通过按键和程序控制能 [5] 杨士河,刘景林,张金萍,等.基于DSP的多电机
够很容易地实现电机的运行,能够通过计算得出电机 协同控制系统设计[J].测控技术.2010,29(6):45-47.
统采用DSP产生脉冲序列,DSP28335共12路16位的 ePWM,能进行频率和占空比控制。 PWM信号频 率由时基周期寄存器TBPDR和时基计数器的计数模 式决定。初始化程序采用的计数模式为递增计数模
式。在递增计数模式下,时基计数器从零开始增加,
直到达到周期寄存器值(TBPDR),然后时基计数器 复位到零,再次开始增加[3]。
论上实现项目目的,达到控制要求。通过硬件选型、
软件设计、控制方案研究和实际调试分析,系统能够
图5 系统控制程序流程图
达到预期设计目的。然而本系统还存在一些问题有待 解决,因本系统是配合项目其他模块而设计的,而其
4 系统调试分析 4.1 PWM脉冲调制分析 图6为DSP输出的脉冲波形和其相对应的参数, 通过修改参数值可以实现对脉冲频率的改变,并且 可以通过DSP的点对输出控制电机的运行。通过调
冲的产生设计,2 步进电机的控制方式设计。 3.1 PWM脉冲序列的产生 PWM是利用微处理器的数字输出来对模拟电
路进行控制的一种非常有效的技术,广泛应用在从 测量、通信到功率控制与变换的许多领域中。本系
精度为1.8°的42步进电机实现装置推动,步进电机 是将电脉冲信号转变为角位移或线位移的开环控制 元步进电机件,其结构图如图2所示。
关键词:DSP28335控制;PWM脉冲波形;步进电机;A3977SED
Design of a Control System for Micro-displacement Stepper Motor Based on TMS320F28335
Xiong Yongkang Li Yuezhong Quan Lixi (1.School of Mechanical and Electronic Engineering, East China Institute of Technology, Nanchang, Jiangxi)
图3 系统总体硬件图
3 系统软件设计 本系统的软件设计拟从两方面展开:1 PWM脉
置(流量传感器)输出信号,通过与事先设定好的 两个阈值A和B(B>A)进行比较,当信号强度为零时 电机推动传感器高速循环扫描现场直到信号强度大 于阈值A时,系统判断为粗调成功。此后系统进入
62
电子技术设计与应用 Electronics Design & Application
他模块尚在调试阶段,测试数据不精确,故电机系统 控制方案设计模块还有待提高,将在后续项目进程中 进一步研究。本系统当前研究成果能够适用于对控制 精度要求不高的场合,因系统的控制方法比较简单、 系统结构简洁,有一定的应用价值。
试分析能够很好地实现实验目的,持续地改变电机
的运行状态。
参考文献:
4.2 控制精度调试
1 系统总体方案设计 本系统总体设计框图如图1所示。拟采用数字 信号处理芯片DSP28335根据控制算法输出一个特定 的PWM脉冲序列,该脉冲序列经由特定的步进电机驱 动器实现对高精度的42步进电机的控制,通过控制 算法自动或者手动调节电机的运行状态和运行速度 并送液晶实时显示。通过对系统点位的检测来判定 是否达到系统的控制目的,最终通过一定算法完成 系统安装位置的选定。
Abstract: This system intends to precisely position a measuring device by using DSP to control stepper motor driving the moving unit. The DSP28335 is used as the master controller in system, the controlled object is a 42 stepping motor with a minimum step angle of 1.8 °, the running of the motor is controlled by the PWM pulse output from DSP through motor drive controller. According to the specific requirements, the PWM parameter settings are changed, and the relative algorithm is used to modify the process parameters so as to achieve the purpose of the system. The control precision of the motor control system is 10μm linear displacement, achieves the purpose of supporting a laboratory project, the system can also be applied to a wide range of motor control.
(下接54页)
63
电子技术设计与应用 Electronics Design & Application
(上接63页)
[6] 周玉国,王青山.电力监控仪与PC机串行通信的 实ห้องสมุดไป่ตู้[J].青岛理工大学学报.2009,30(2):70-74. [7] 徐洋,王宏华,周强,等.基于MSP430单片机的无 刷直流电机实验测试平台设计[J].机械制造与 自动化,2010,39(4):169-171 [8] Shinde P. Hardware Design Guidelines for
图1 系统总体设计框图
2 系统硬件实现 本系统拟选用的主控制器为TMS320F28335,
61
电子技术设计与应用 Electronics Design & Application
其具有150MHz的高速处理能力,12位16通道ADC, 具备32位浮点处理单元,有多达18路的PWM输出, 其 中 有 6路 为 TI特 有 的 更 高 精 度 的 PWM输 出 (HRPWM)。本系统中正是使用了其独立的PWM模 块产生脉冲信号。因课题需要精确定位故选用控制
图4 PWM初始化流程
3.2 步进电机的控制 本系统设计了手动和自动两种控制方式,手动
模式主要运用于对自动化和控制要求不高的场合,
通过按键实现电机的步移、加减速、正反转和启停。
自动模式运用于对自动化程度、控制精度要求高的
工况。针对实验室项目,本系统采用的控制方式主
要为自动模式。上位机上电后即开始检测实验室装
图2 步进电机结构图
从理论上讲,步进电机的驱动方式只需通过循 环改变定子线圈励磁就能实现,但是由于电机对电 路驱动能力要求高,故本系统采用外接驱动芯片 A3977,A3977细分驱动器采用高性能的专用微步距 电脑控制芯片,其含内置转换器的完整的微步电动 机驱动器。只需在一个步进输入一个脉冲即可驱动 电动机进行一个步进,通过两个逻辑输入确定所处
的运行角速度并送液晶屏显示当前过程量。连接好 丝杆的电机能够实现对传感器的推动。通过上位机 对传感器信号强度的实时监测,系统能够基本满足 设计目的,即系统能自动并有效地进行最佳信号点 的检测,达到对物块的精确定位。
图6 PWM脉冲波调试
5 小结
本系统从实际工程背景出发,旨在为实验室某项
目提供技术支持。通过对系统的设计和调试能够从理
电子技术设计与应用 Electronics Design & Application
10.3969/j.issn.1000-0755.2014.04.018
基于TMS320F28335的微位移步进电机控制系统设计
熊永康 李跃忠 全丽希 (1.东华理工大学机械与电子工程学院,江西 南昌)
摘 要:本系统拟计划采用DSP控制步进电机推动轻装置移动实现测量装置的精准定位。系统拟采用的 主控制器为DSP28335,被控对象为最小步进角为1.8°的42步进电机,采用DSP输出PWM脉冲波通过电机 驱动器控制电机的运行。系统根据具体控制要求改变对PWM参数的设置,并通过相关的算法对过程参数进行 修正以完成系统目的。电机控制系统的控制精度为线位移10μm,能够达到为实验室项目进行支持的目的, 本系统亦可广泛应用于电机控制领域。
TMS320F28xx and TMS320F28xxx DSCs. TI Application Report[R].2008
[1] 栾东海.某步进电机应用系统设计及其快速重复
本系统采用电机推动丝杆移动装置。丝杆采用 启停特性研究[D].南京:南京理工大学,2012.
[2] 李峻,李学全,胡德金.步进电机的运动控制系统 的是滚珠丝杠,其为一种将回转运动转化为直线运
动的理想的产品。
及其应用[J].微特电机,2000,28(2):37-39.
本系统选用的电机的最小步进角为1.8°故控制 [3] 王忠勇,陈恩庆.DSP原理与应用技术[M].
精度调试实际就是丝杆精度的调试,本系统选用的 北京:电子工业出版社,2009:59-100.
丝杆的额定扭矩为4N.m,最小角位移对应线位移为 [4] Texas Instruments.TMS320F28xx and TMS320F28xxx
PWM信号周期与频率的计算如下:
ePWM的时钟
TBCLK=SYSCLKOUT/(HSPCLKDIV×
CLKDIV): (1)